Spring 2020: Venu: Haag 312, Time: M/W 4-5:15pm ECE 5582 Computer Vision Lec 03: Image Formation - Geometry Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: [email protected], Ph: x 2346. http://l.web.umkc.edu/lizhu Z. Li: ECE 5582 Computer Vision, 2020 p.1 slides created with WPS Office Linux and EqualX LaTex equation editor

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Spring 2020: Venu: Haag 312, Time: M/W 4-5:15pm
ECE 5582 Computer VisionLec 03: Image Formation - Geometry
Zhu LiDept of CSEE, UMKC
Office: FH560E, Email: [email protected], Ph: x 2346.http://l.web.umkc.edu/lizhu
Z. Li: ECE 5582 Computer Vision, 2020 p.1
slides created with WPS Office Linux and EqualX LaTex equation editor
Outline
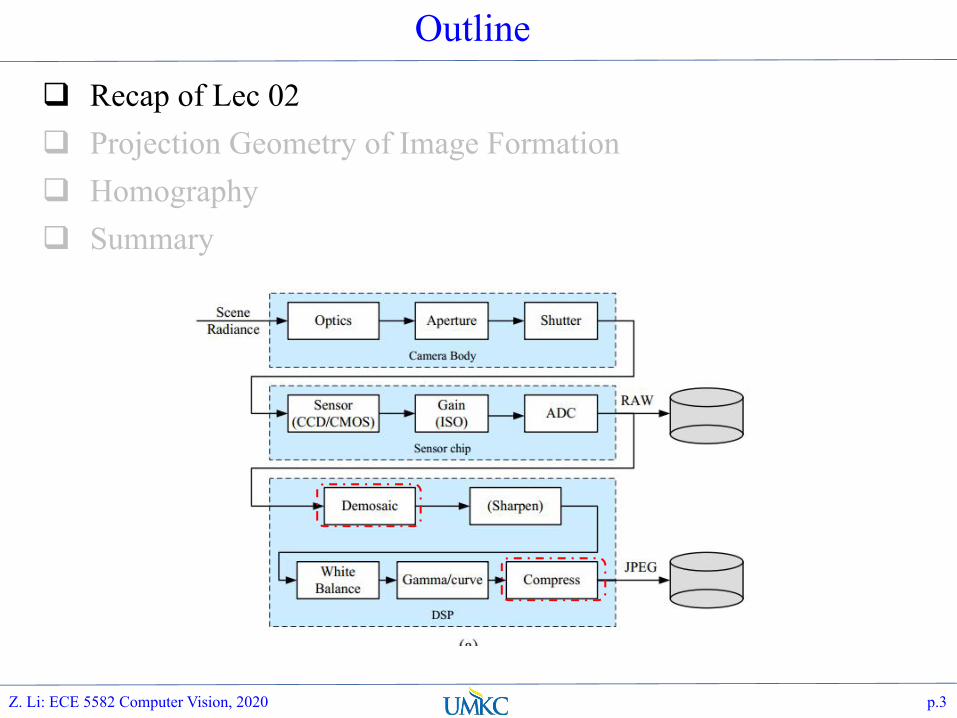
Recap of Lec 02 Projection Geometry of Image Formation Homography Summary
Z. Li: ECE 5582 Computer Vision, 2020 p.2
Outline
Recap of Lec 02 Projection Geometry of Image Formation Homography Summary
Z. Li: ECE 5582 Computer Vision, 2020 p.3
Demosaicing
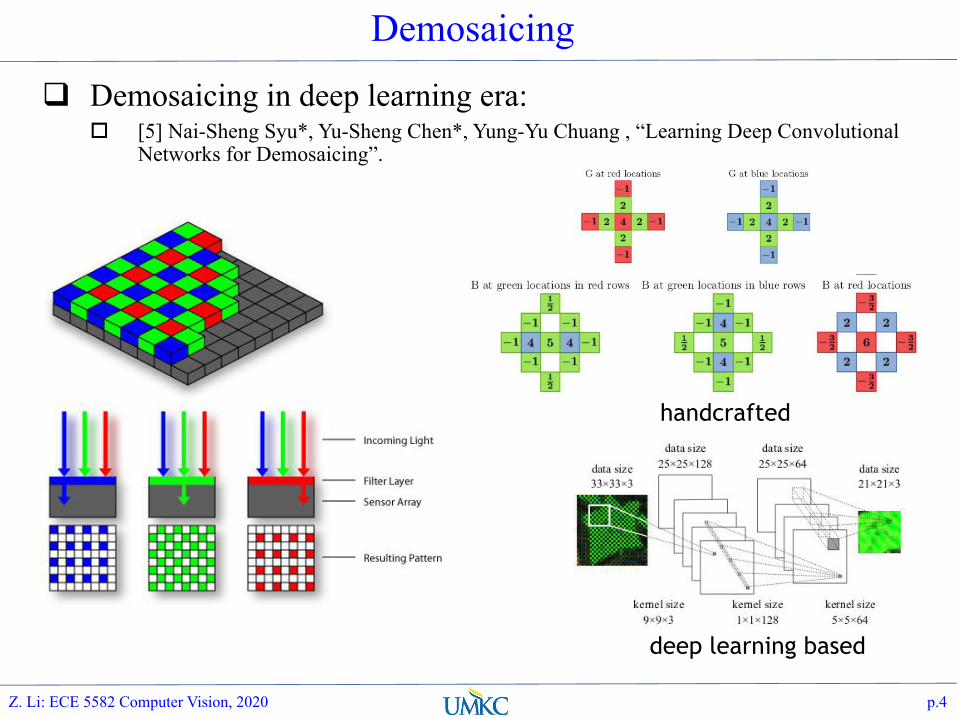
Demosaicing in deep learning era: [5] Nai-Sheng Syu*, Yu-Sheng Chen*, Yung-Yu Chuang , “Learning Deep Convolutional
Networks for Demosaicing”.
Z. Li: ECE 5582 Computer Vision, 2020 p.4
handcrafted
deep learning based

DMCNN
Similar to our ICME work, residual learning blocks with BN and SE
Good performance:
Z. Li: ECE 5582 Computer Vision, 2020 p.5
paras' network [6] fordark image denoising and demosaic

HSV Color Model
Hue, Satuation and Value (brightness) color model
A cone with inituitive appeal of painters' tint, shade and tone model pure red: H=0, S=1, V=1. tints: adding white pigments, decreasing saturation shades: adding black, decrease brightness tones: dereasing S and V
Human can differentiate approx. 128 hues, and 130 levels of saturation
The number of values (brightness) is color dependent, approx 16 for blue, and 23 for yellow
Z. Li: ECE 5582 Computer Vision, 2020 p.6
MPEG-7 Scalable Color Descriptor
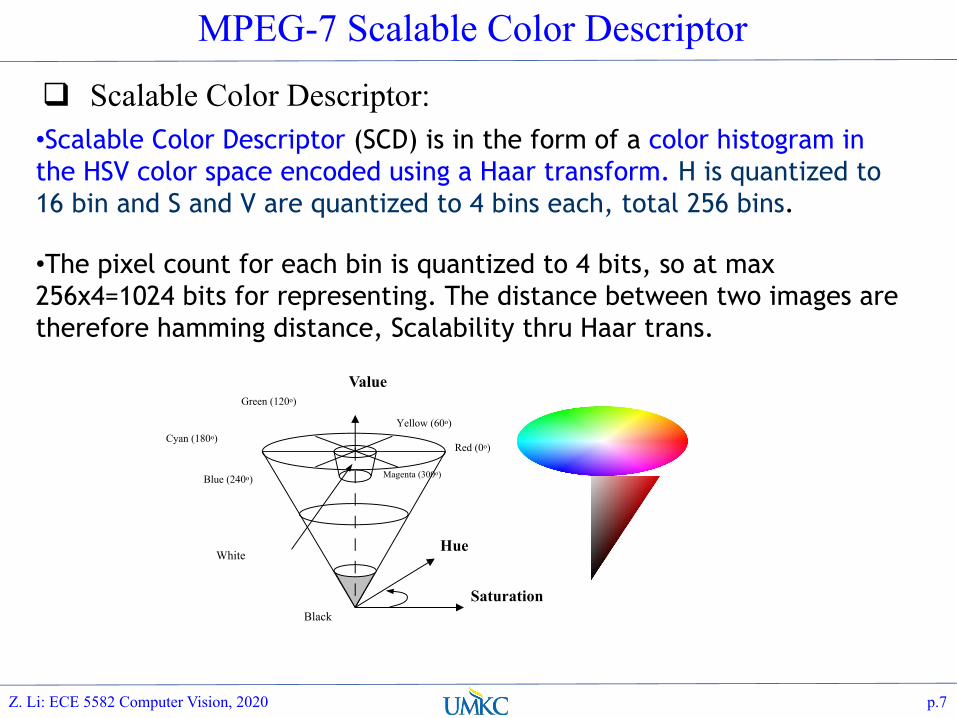
Scalable Color Descriptor:•Scalable Color Descriptor (SCD) is in the form of a color histogram in the HSV color space encoded using a Haar transform. H is quantized to 16 bin and S and V are quantized to 4 bins each, total 256 bins.
•The pixel count for each bin is quantized to 4 bits, so at max 256x4=1024 bits for representing. The distance between two images are therefore hamming distance, Scalability thru Haar trans.
Saturation
Hue
Value
Red (0o)
Yellow (60o)
Green (120o)
Cyan (180o)
Blue (240o) Magenta (300o)
Black
White
p.7Z. Li: ECE 5582 Computer Vision, 2020
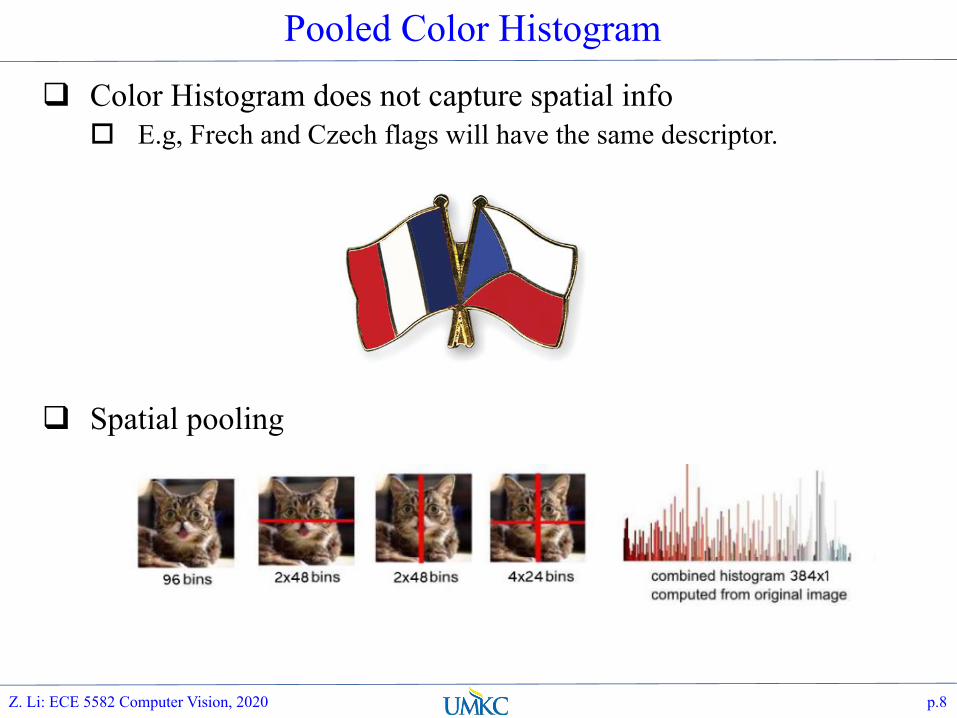
Pooled Color Histogram
Color Histogram does not capture spatial info E.g, Frech and Czech flags will have the same descriptor.
Spatial pooling
Z. Li: ECE 5582 Computer Vision, 2020 p.8
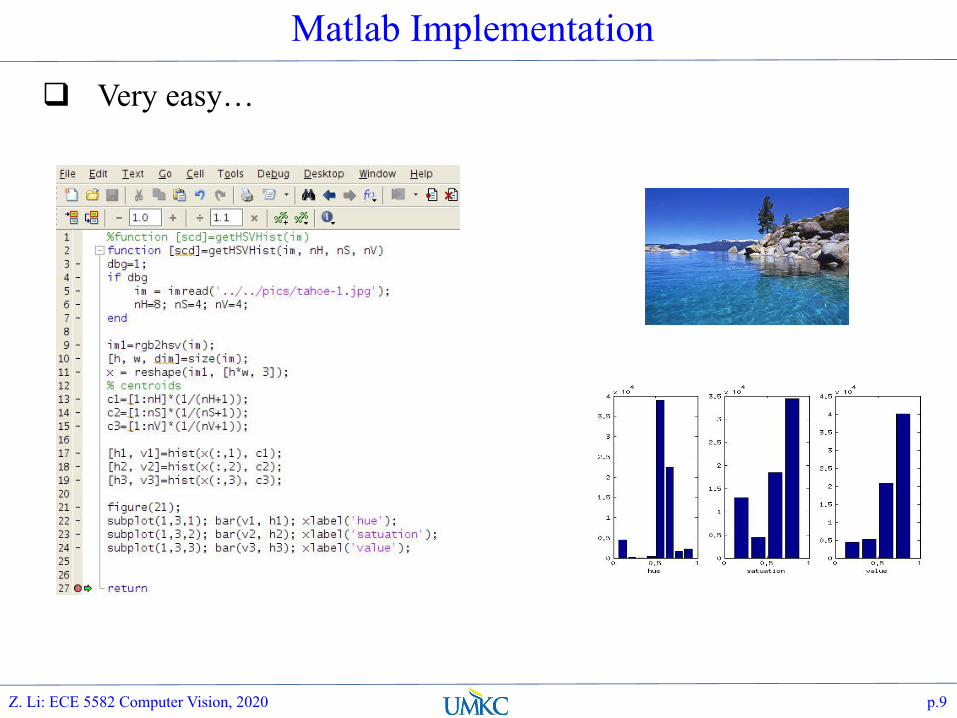
Matlab Implementation
Very easy…
Z. Li: ECE 5582 Computer Vision, 2020 p.9

Adaptive Bin Color Histogram
SCD uses fixed color bins. This can be good: the feature is state-less,and can be easily
vectorized or hashed. But not as compact, nor as representative
How about let the color bins also adaptive to the images ?
Z. Li: ECE 5582 Computer Vision, 2020 p.10
3,4,..8 dominantColor approximation
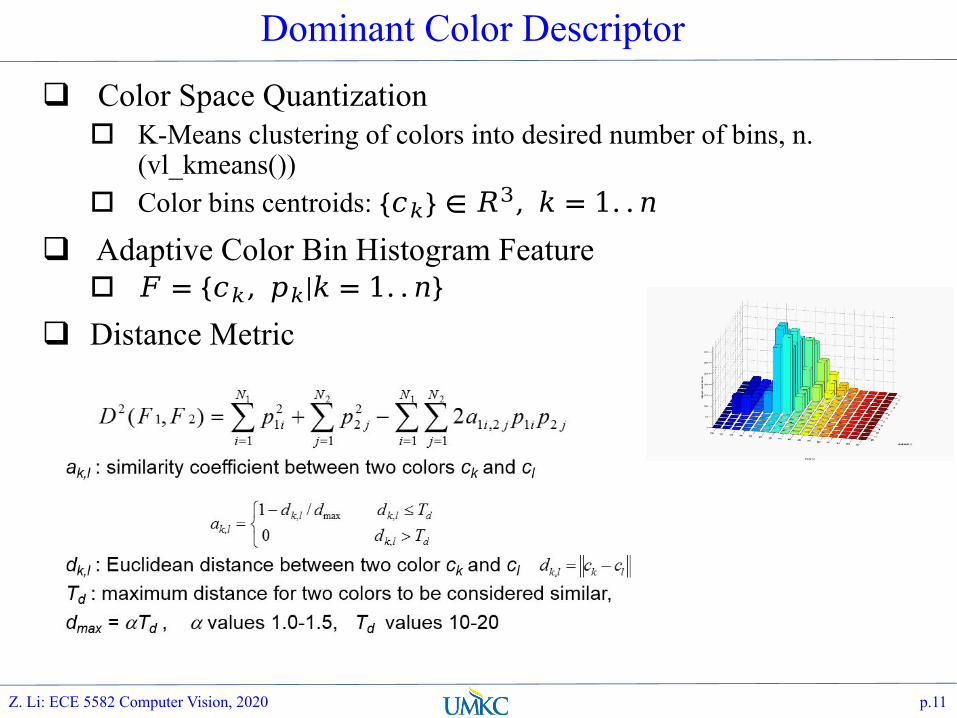
Dominant Color Descriptor
Color Space Quantization K-Means clustering of colors into desired number of bins, n.
(vl_kmeans()) Color bins centroids: ���� ∈ ��, � = 1. . �
Adaptive Color Bin Histogram Feature � = ���, ��|� = 1. . ��
Distance Metric
Z. Li: ECE 5582 Computer Vision, 2020 p.11

Matlab Implementation
Again, rather easy with Matlab:
Z. Li: ECE 5582 Computer Vision, 2020 p.12
Outline
Recap of Lec 02 Projection Geometry of Image Formation Homography Summary
Z. Li: ECE 5582 Computer Vision, 2020 p.13

Pinhole Camera Model
Aperture : avoid ambiguity on image plane
Pinhole Camera model:
Z. Li: ECE 5582 Computer Vision, 2020 p.14
focal length: f

Perspective Projection Geometry How’s a point in the world coordinate P=[X, Y, Z], relates to
the image plane coordinates p=[u, v] ?
Z. Li: ECE 5582 Computer Vision, 2020 p.15
Camera Center
(0, 0, 0)
úúú
û
ù
êêê
ë
é=
úúú
û
ù
êêê
ë
é=
532
ZYX
P.
.. f=2 Z Y
úû
ùêë
é=
vu
p
.V
U
)5/2(*2* -=-=ZfXu
)5/2(*3* -=-=ZfYv
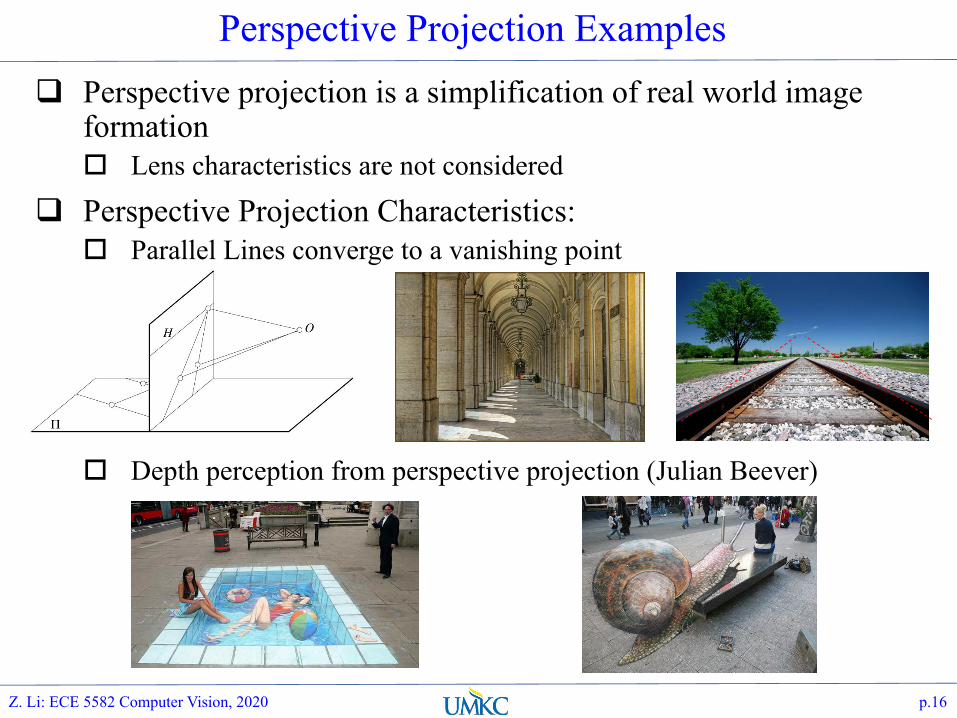
Perspective Projection Examples Perspective projection is a simplification of real world image
formation Lens characteristics are not considered
Perspective Projection Characteristics: Parallel Lines converge to a vanishing point
Depth perception from perspective projection (Julian Beever)
Z. Li: ECE 5582 Computer Vision, 2020 p.16
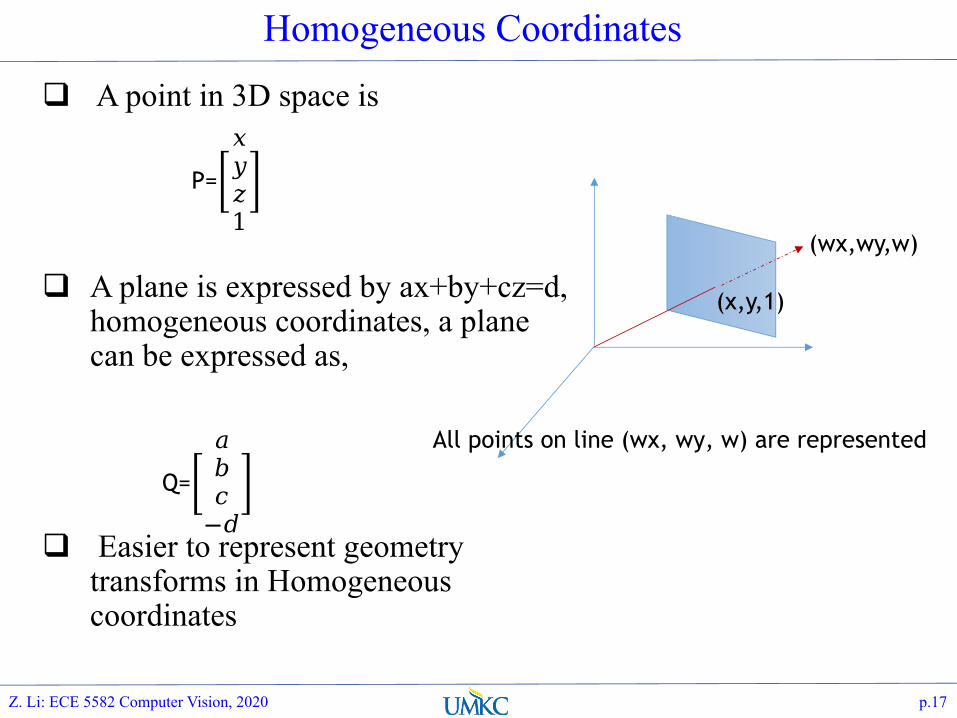
Homogeneous Coordinates
A point in 3D space is
A plane is expressed by ax+by+cz=d, homogeneous coordinates, a plane can be expressed as,
Easier to represent geometry transforms in Homogeneous coordinates
Z. Li: ECE 5582 Computer Vision, 2020 p.17
P=����1�
Q=����−��
(x,y,1)
(wx,wy,w)
All points on line (wx, wy, w) are represented
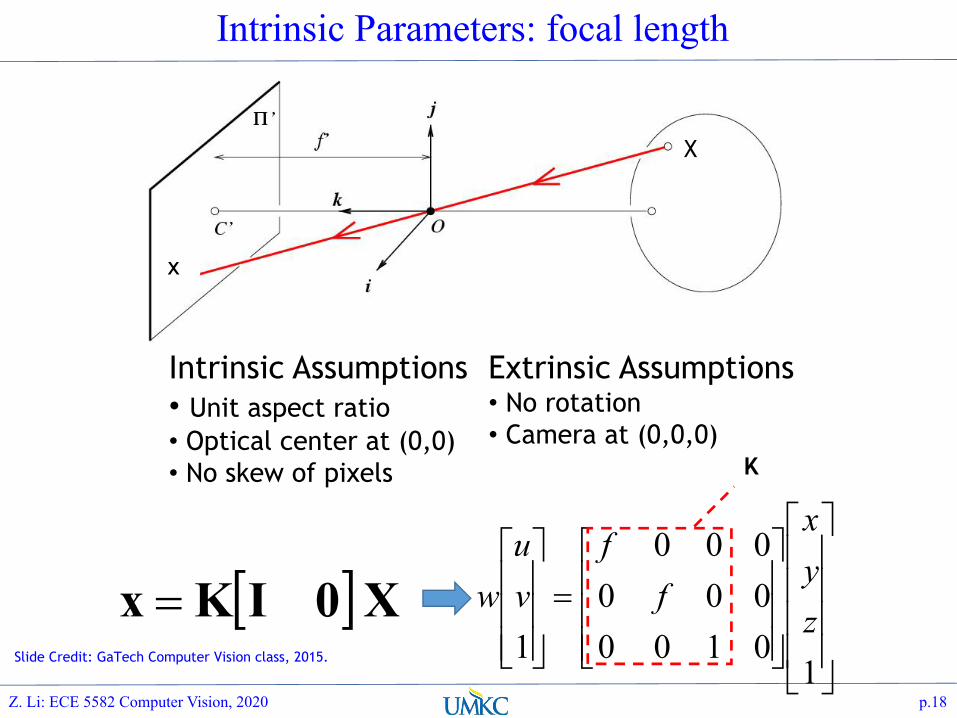
Intrinsic Parameters: focal length
Z. Li: ECE 5582 Computer Vision, 2020 p.18
[ ]X0IKx =úúúú
û
ù
êêêê
ë
é
úúú
û
ù
êêê
ë
é=
úúú
û
ù
êêê
ë
é
10100000000
1zyx
ff
vu
w
K
Slide Credit: GaTech Computer Vision class, 2015.
Intrinsic Assumptions• Unit aspect ratio• Optical center at (0,0)• No skew of pixels
Extrinsic Assumptions• No rotation• Camera at (0,0,0)
X
x
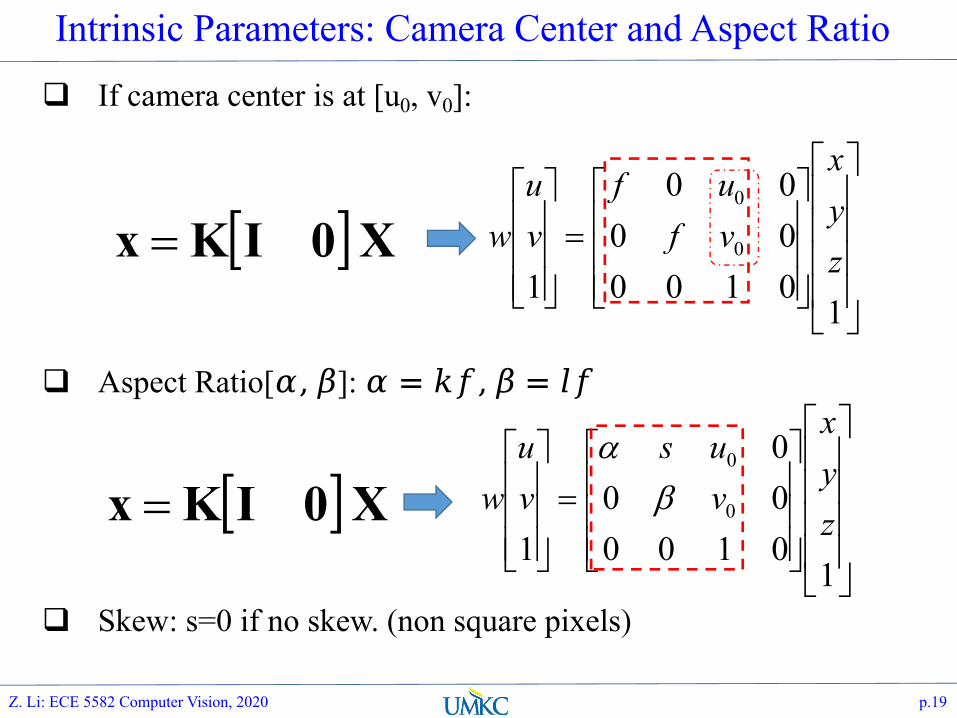
Intrinsic Parameters: Camera Center and Aspect Ratio
If camera center is at [u0, v0]:
Aspect Ratio[�,�]: � = �X,� = �X
Skew: s=0 if no skew. (non square pixels)
Z. Li: ECE 5582 Computer Vision, 2020 p.19
[ ]X0IKx =úúúú
û
ù
êêêê
ë
é
úúú
û
ù
êêê
ë
é=
úúú
û
ù
êêê
ë
é
101000000
10
0
zyx
vfuf
vu
w
[ ]X0IKx =úúúú
û
ù
êêêê
ë
é
úúú
û
ù
êêê
ë
é=
úúú
û
ù
êêê
ë
é
10100000
10
0
zyx
vus
vu
w ba

3D Rotation
Rotate along axis, the order matters
Z. Li: ECE 5582 Computer Vision, 2020 p.20
� = ���������������
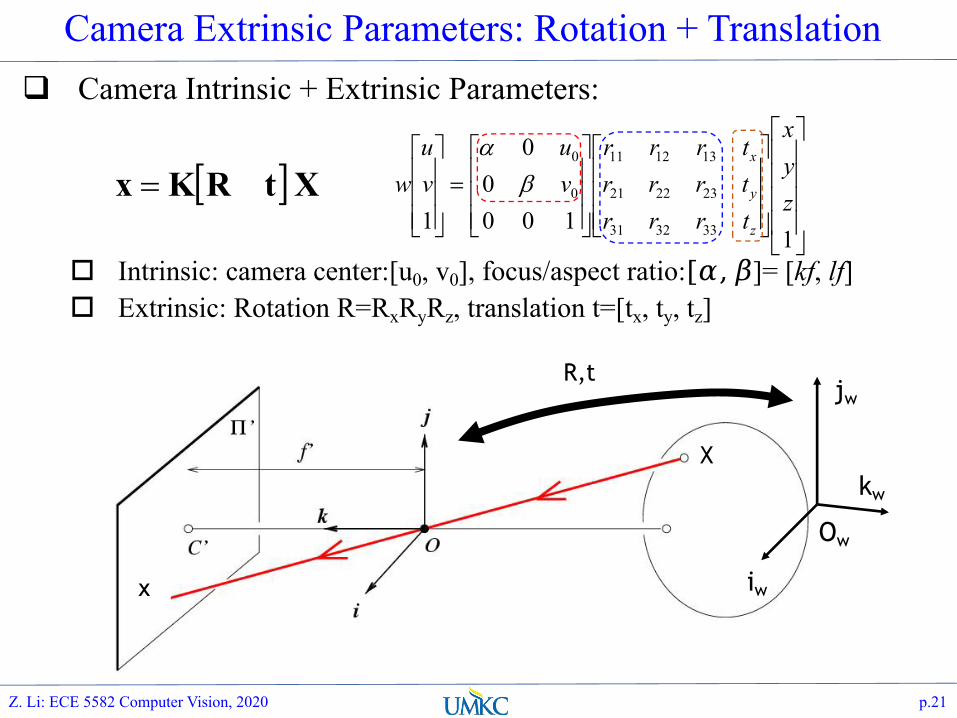
Camera Extrinsic Parameters: Rotation + Translation Camera Intrinsic + Extrinsic Parameters:
Intrinsic: camera center:[u0, v0], focus/aspect ratio:[�,�]= [kf, lf] Extrinsic: Rotation R=RxRyRz, translation t=[tx, ty, tz]
Z. Li: ECE 5582 Computer Vision, 2020 p.21
[ ]XtRKx =úúúú
û
ù
êêêê
ë
é
úúú
û
ù
êêê
ë
é
úúú
û
ù
êêê
ë
é=
úúú
û
ù
êêê
ë
é
1100
00
1 333231
232221
131211
0
0
zyx
trrrtrrrtrrr
vu
vu
w
z
y
x
ba
Ow
iw
kw
jwR,t
X
x
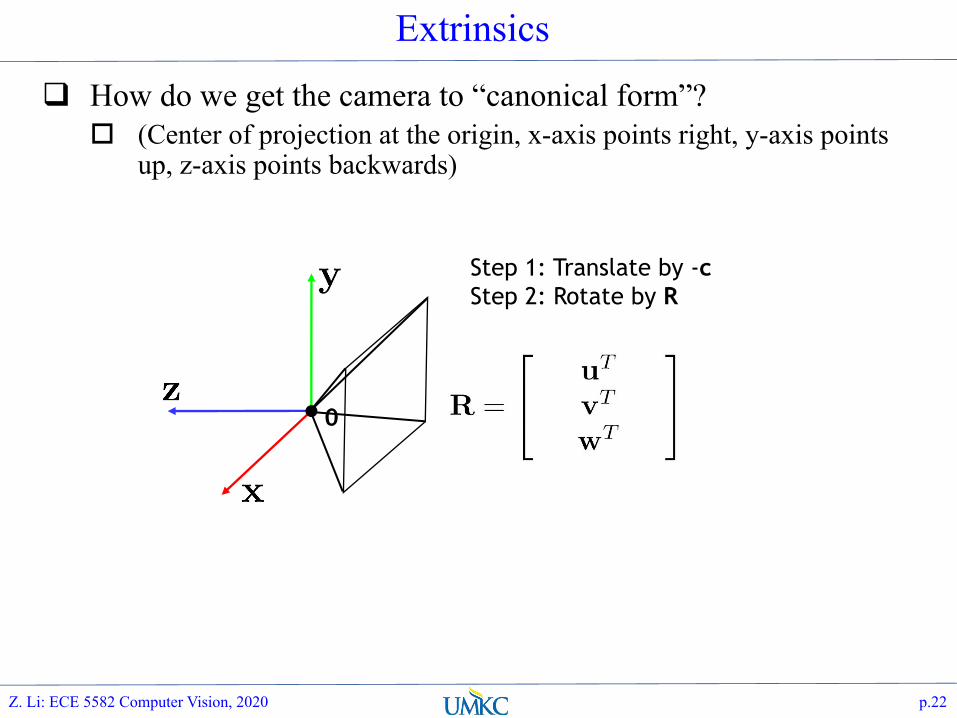
Extrinsics
How do we get the camera to “canonical form”? (Center of projection at the origin, x-axis points right, y-axis points
up, z-axis points backwards)
0
Step 1: Translate by -cStep 2: Rotate by R
Z. Li: ECE 5582 Computer Vision, 2020 p.22

Camera Projection Matrix
With homogeneous coordiantes
Z. Li: ECE 5582 Computer Vision, 2020 p.23
[ ]XtRKx = x: Image Coordinates: (u,v,1)K: Intrinsic Matrix (3x3)R: Rotation (3x3) t: Translation (3x1)X: World Coordinates: (X,Y,Z,1)
Ow
iw
kw
jwR,t
X
x

Outline
Recap of Lec 02 Projection Geometry of Image Formation Homography how images of the same 3D scene are related
Summary
Z. Li: ECE 5582 Computer Vision, 2020 p.24

Homographies
What is homography ? How pixels on two images of the same object/scene are related ?
Z. Li: ECE 5582 Computer Vision, 2020 p.25
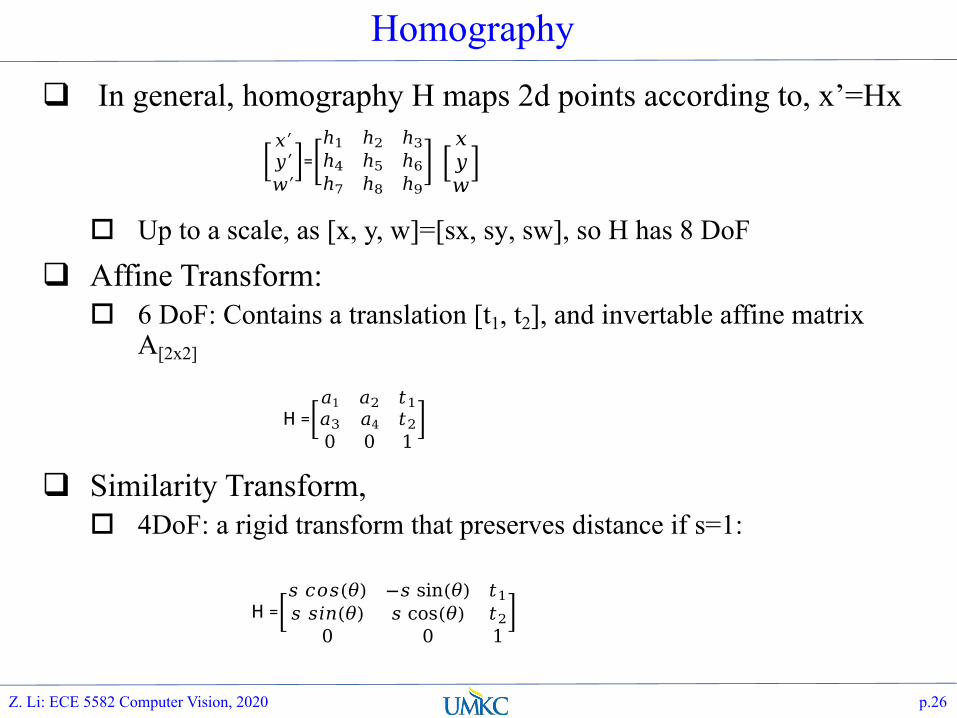
Homography
In general, homography H maps 2d points according to, x’=Hx
Up to a scale, as [x, y, w]=[sx, sy, sw], so H has 8 DoF
Affine Transform: 6 DoF: Contains a translation [t1, t2], and invertable affine matrix
A[2x2]
Similarity Transform, 4DoF: a rigid transform that preserves distance if s=1:
Z. Li: ECE 5582 Computer Vision, 2020 p.26
��′�′�′�=�ℎ� ℎ� ℎ�ℎ� ℎ� ℎ�ℎ� ℎ� ℎ�
� �����
H =��1 �� ���� �4 ��0 0 1
�
H =�� �X���� −� sin���� ��� �X���� � cos���� ��
0 0 1�

Estimate Homography
What is homography ? How pixels on two images of the same object/scene are related ?
Z. Li: ECE 5582 Computer Vision, 2020 p.27
SIFT based matchingCan we do better than this ?
%vl_feat package SIFT matching:[fa, da] = vl_sift (Ia) ;[fb, db] = vl_sift (Ib) ;[matches, scores] = vl_ubcmatch (da, db) ;

Similarity/Affine vs Projective Transform
Similarity vs Affine vs Projective
Z. Li: ECE 5582 Computer Vision, 2020 p.28

Geometry manuplation of pixels
Specify an Affine matrix H, and then re-arrange pixels to simulate new image formation from different camera angles J = imwrap(I, A);
Z. Li: ECE 5582 Computer Vision, 2020 p.29

Why we care about Homography ? In object retrieval, we need to know exactly which interesting
points in one image, is related to the interesting points in another For re-ranking of short list For localizing the query object Depth estimation from homograph (non-GPS positioning)
Z. Li: ECE 5582 Computer Vision, 2020 p.30
Object re-identification: homography for geometry re-ranking
Navigation/non GPS positioning:

Homography Estimation – DLT Algorithm
To recover H, which has 8 DoF/variables, we just need 4 matching pixel pairs, ideally.
Say if we have 2 points on (u,v) and (x,y) plane matched
s��′�′1� = �
ℎ� ℎ� ℎ�ℎ� ℎ� ℎ�ℎ� ℎ� ℎ�
� ���1�
For each pair, rearranging by dividing first row with the 3rd, and the 2nd row with the 3rd, we have the following,
Do this for 4 points pair: (x1, y1; x’1, y’1),…, (x4, y4; x’4, y’4), we will have 8 equations to solve 8 parameters
Z. Li: ECE 5582 Computer Vision, 2020 p.31
�− ℎ� � − ℎ��− ℎ� + �ℎ�� + ℎ��+ ℎ���′ = 0− ℎ�� − ℎ��− ℎ� + �ℎ�� + ℎ� � + ℎ���� = 0
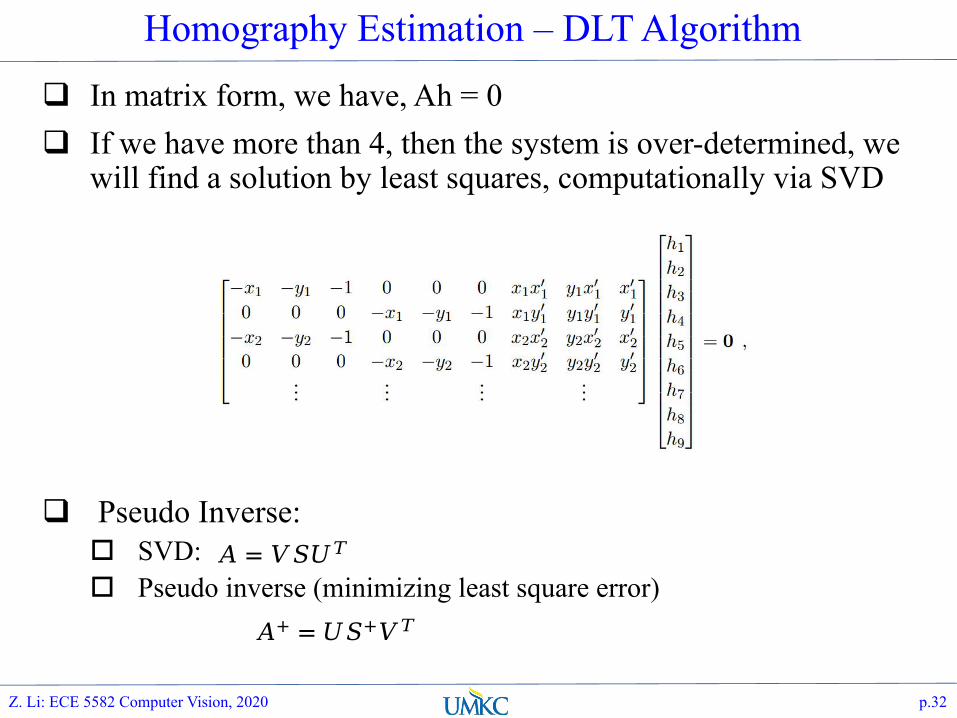
Homography Estimation – DLT Algorithm
In matrix form, we have, Ah = 0 If we have more than 4, then the system is over-determined, we
will find a solution by least squares, computationally via SVD
Pseudo Inverse: SVD: Pseudo inverse (minimizing least square error)
Z. Li: ECE 5582 Computer Vision, 2020 p.32
� = �X��
�+ = �X+��

SVD revisited
The Singular Value Decomposition (SVD) of an nxm matrix A, is,
Where the diagonal of S are the eigen values of AAT, [��, ��,…, ��], called singular values
U are eigenvectors of AAT, and V are eigen vectors of ATA
Z. Li: ECE 5582 Computer Vision, 2020 p.33
� = �X�� =�X������
�
A(nxm) = U(nxn)S(nxm) V(mxm)
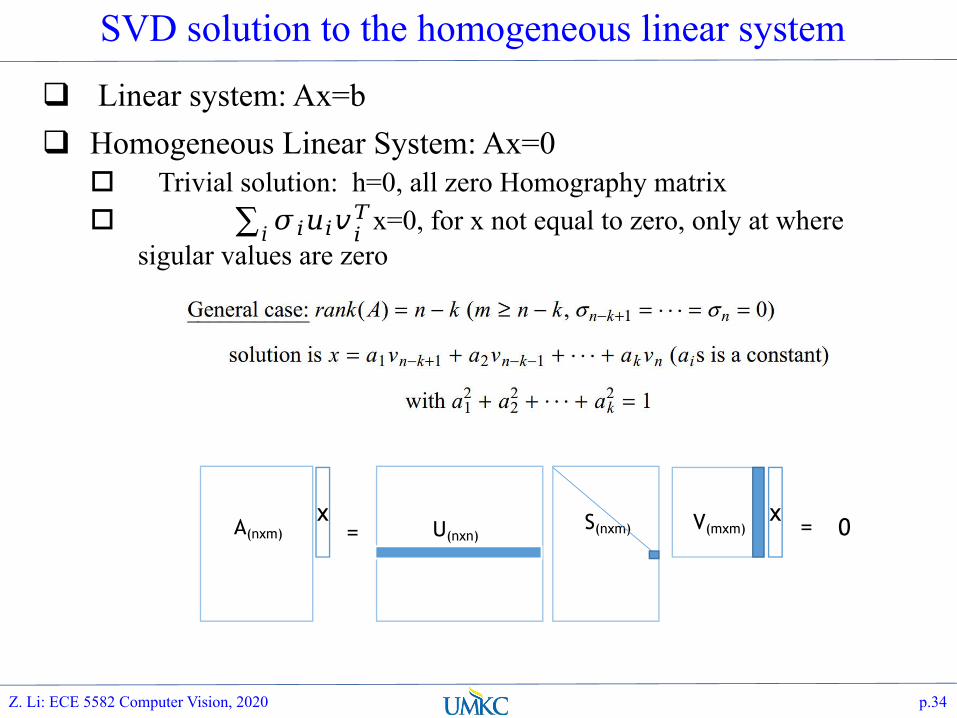
SVD solution to the homogeneous linear system
Linear system: Ax=b Homogeneous Linear System: Ax=0 Trivial solution: h=0, all zero Homography matrix �X������
�x=0, for x not equal to zero, only at where sigular values are zero
Z. Li: ECE 5582 Computer Vision, 2020 p.34
A(nxm) = U(nxn)S(nxm) V(mxm)
xx = 0
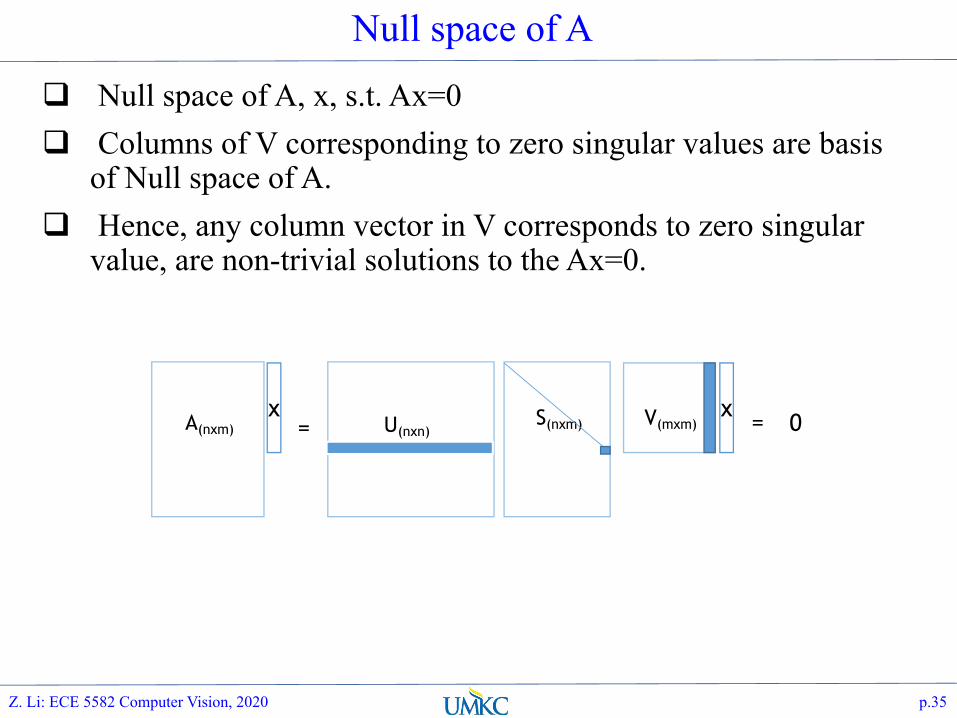
Null space of A
Null space of A, x, s.t. Ax=0 Columns of V corresponding to zero singular values are basis
of Null space of A. Hence, any column vector in V corresponds to zero singular
value, are non-trivial solutions to the Ax=0.
Z. Li: ECE 5582 Computer Vision, 2020 p.35
A(nxm) = U(nxn)S(nxm) V(mxm)
xx = 0

VL_FEAT Implementation
VL_FEAT has an implementation:
Z. Li: ECE 5582 Computer Vision, 2020 p.36
zero singularvalue V column
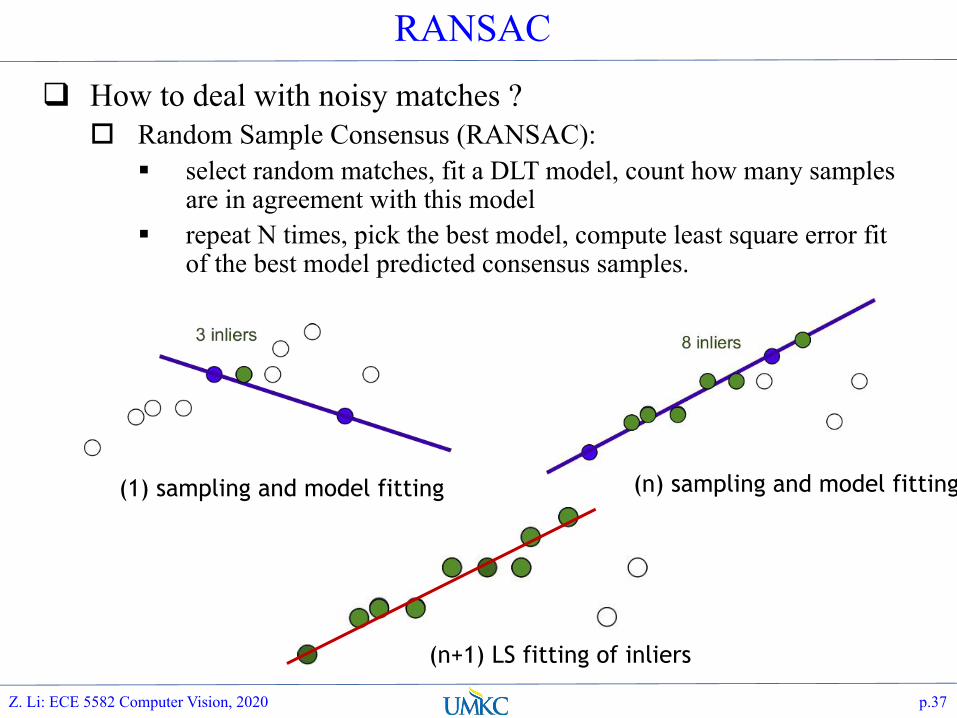
RANSAC
How to deal with noisy matches ? Random Sample Consensus (RANSAC):
select random matches, fit a DLT model, count how many samples are in agreement with this model
repeat N times, pick the best model, compute least square error fit of the best model predicted consensus samples.
Z. Li: ECE 5582 Computer Vision, 2020 p.37
(1) sampling and model fitting (n) sampling and model fitting
(n+1) LS fitting of inliers
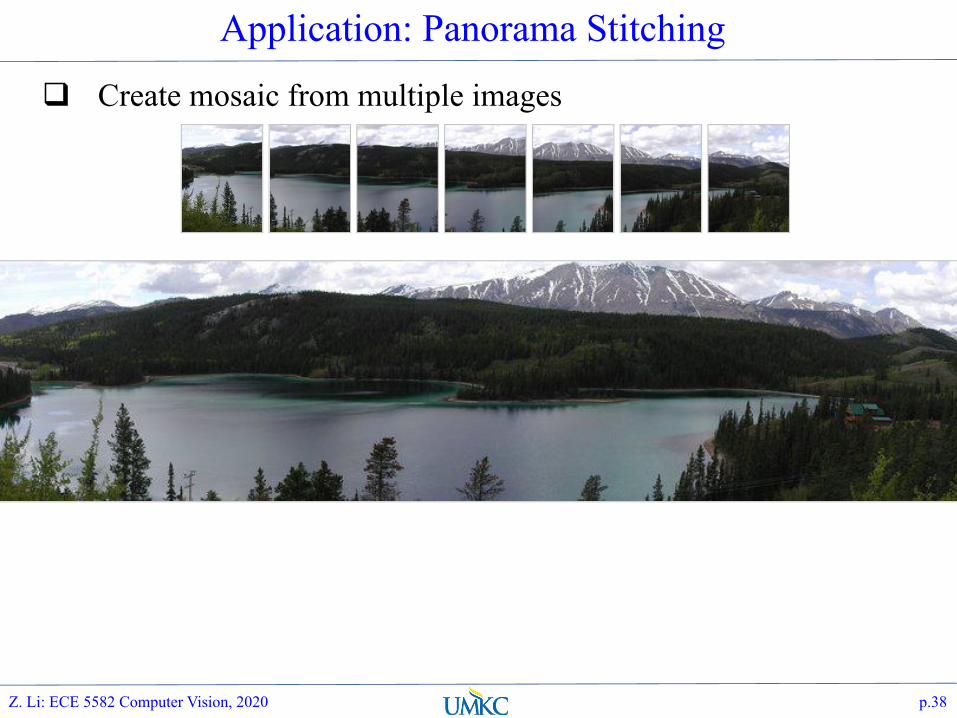
Application: Panorama Stitching
Create mosaic from multiple images
Z. Li: ECE 5582 Computer Vision, 2020 p.38
Summary
Image Formation Pixels not only carry color information, but also carry geometry info Given 3D scene, a camera model, pixels locations on the image
plane is uniquely determined The reverse problem is not as easy (but deep learning is making
good progress on single view depth estimation) Homography: how pixels are related - implications in image
retrieval
Z. Li: ECE 5582 Computer Vision, 2020 p.39
Related Documents











