ECE 477 FINAL PRESENTATION TEAM 7 SPRING 2013 COST ROBOT ERIC OSBORNE, BRYAN DALLAS, ANDREW LOVELESS, CAROLINE TRIPPEL

ECE 477 FINAL PRESENTATION TEAM 7 SPRING 2013 COST ROBOT ERIC OSBORNE, BRYAN DALLAS, ANDREW LOVELESS, CAROLINE TRIPPEL.
Dec 25, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
ECE 477 FINAL PRESENTATION TEAM 7 SPRING 2013
COST ROBOT
ERIC OSBORNE, BRYAN DALLAS,ANDREW LOVELESS, CAROLINE TRIPPEL
Outline
• Project overview • Block diagram• Design challenges• Individual contributions• Project demonstration• Questions / discussion
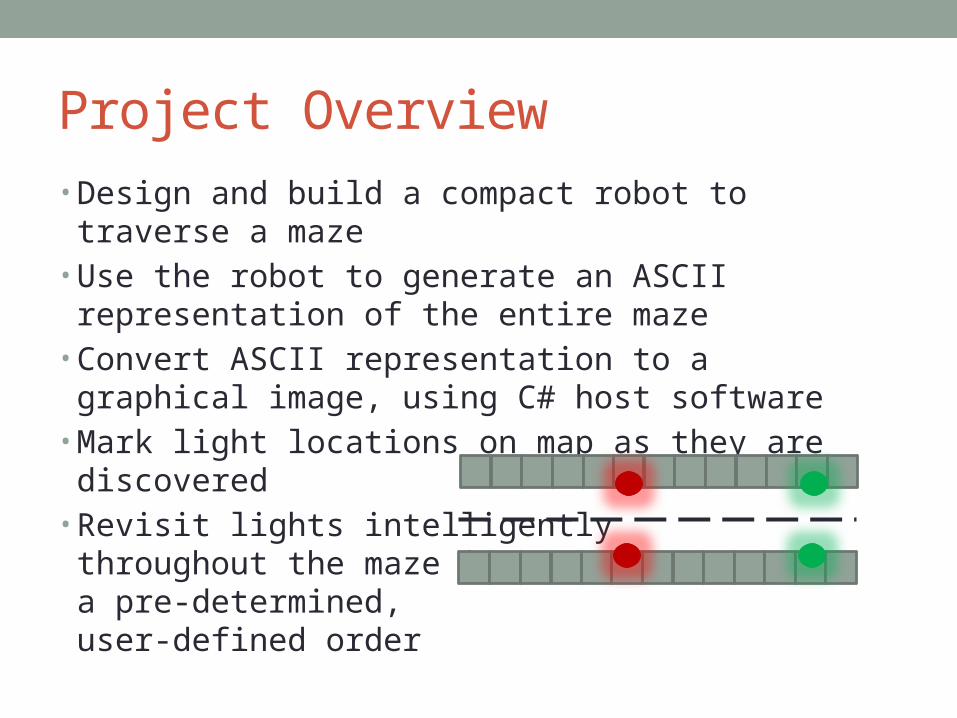
Project Overview• Design and build a compact robot to traverse a maze• Use the robot to generate an ASCII representation of the
entire maze• Convert ASCII representation to a graphical image, using
C# host software• Mark light locations on map as they are discovered• Revisit lights intelligently
throughout the maze in a pre-determined,user-defined order
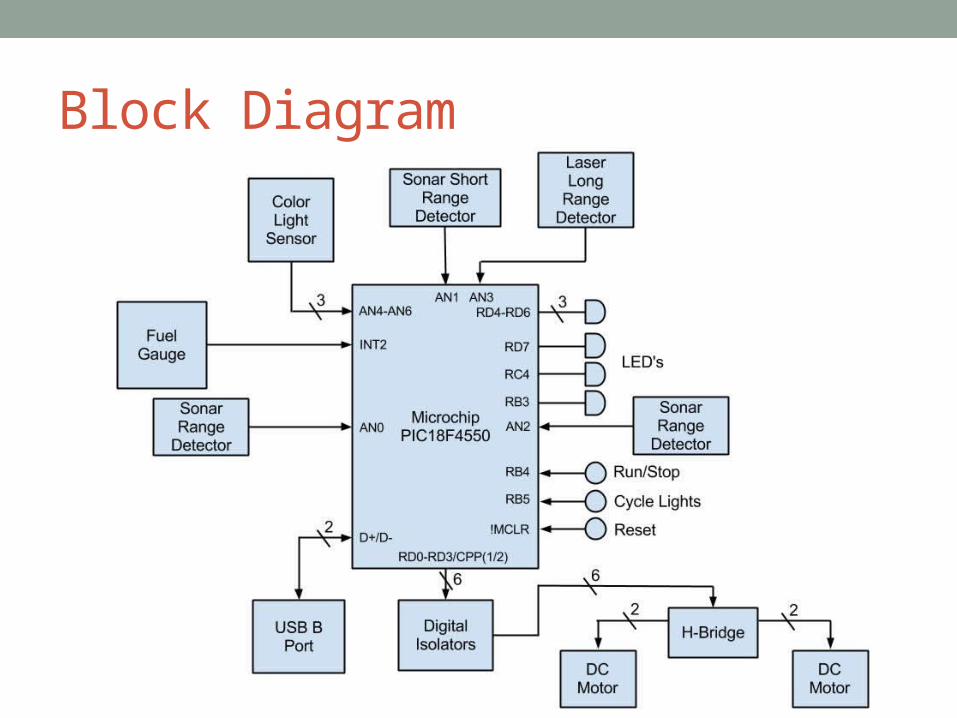
Block Diagram
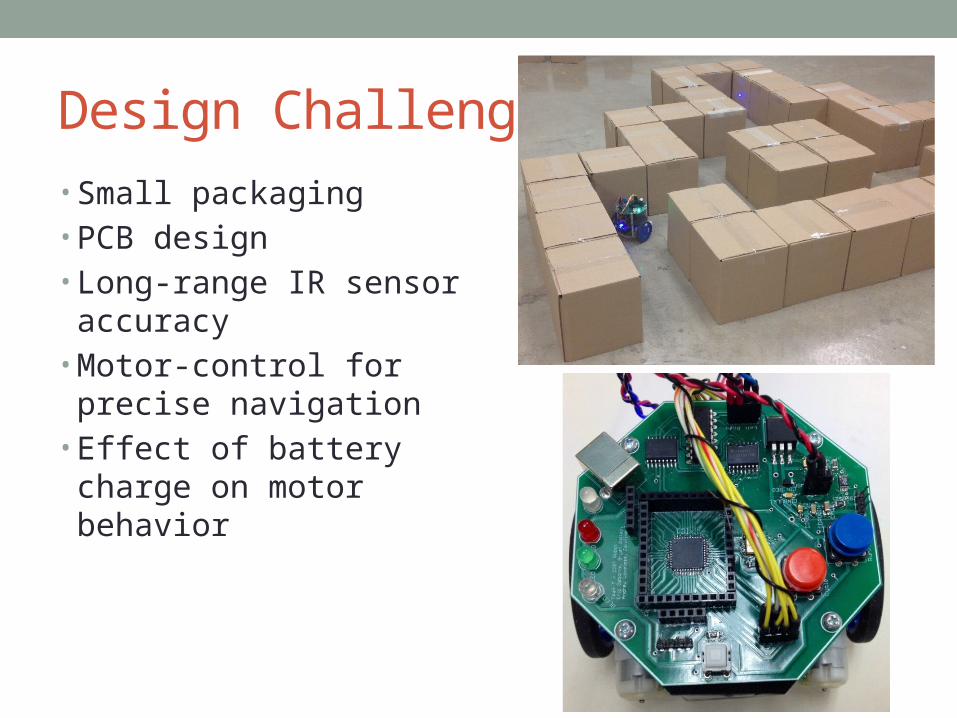
Design Challenges• Small packaging• PCB design• Long-range IR sensor
accuracy• Motor-control for precise
navigation• Effect of battery charge on
motor behavior
Individual Contributions• Team Leader – Eric Osborne• Team Member 2 – Bryan Dallas• Team Member 3 – Andrew Loveless• Team Member 4 – Caroline Trippel
Team Leader – Eric Osborne• General peripherals selection• Power subsystem design• Parts approval• Schematic / layout design• PCB design• Fuel gauge implementation• Robot body construction / soldering• Final testing/debugging
Member 2 – Bryan Dallas• General peripherals selection• Schematic / layout design• Code initializations for peripherals• Final Tremaux algorithm enhancements /
debugging• Integration of C# host software into USB
protocol code• Algorithm to revisit lights• Robot body construction• Final testing/debugging
Member 3 – Andrew Loveless• General peripherals selection• Microcontroller selection• Microcontroller definitions / initial module testing• Power subsystem design• Schematic design / layout• PCB design• Robot movement/control• Final testing/debugging
Member 4 – Caroline Trippel• General peripherals selection• Microcontroller definitions / initial module testing• Initial USB code for sample application• Pin declarations/initializations• Initial Tremaux algorithm development• Robot movement/control• C# host software for map generation• Final testing/debugging
Project Demonstration1. An ability to detect proximity to maze walls and prevent wall
collisions.
2. An ability to find specific locations in the maze based on the placement of colored lights.
3. An ability to turn and change direction of movement.
4. An ability to generate an ASCII representation of the explored maze.
5. An ability to transfer stored ASCII map to a GUI program on a desktop computer via USB.
PSSC Demonstration Video
Questions / Discussion
Related Documents











