Appiieol Ocean Research ELSEVIER Applied Ocean Research 23 (2001) 63-81 - www.elsevier.com/locate/apor Dynamic tension in risers and mooring lines: an algebraic approximation for harmonic excitation J.A.P. Aranha*, M.O. Pinto Department of Naval Engineering, USP, CP61548, Sao Paulo, Brazil Received 20 June 2000; revised 20 March 2001 Abstract A riser or mooring line, when excited dynamically at its upper end, resists the imposed displacement by increasing its tension. Viscous damping in the lateral motion is known to be crucial and the resulting problem is thus intrinsically nonlinear. In this paper, an algebraic expression for the dynamic tension, formerly obtained [Polar Engineers, ISOPE'-93 (1993)], is revised and enlarged, once the variation ofthe tension along the suspended length is specifically focused here. The obtained expression is systematically compared with results from usual nonlinear time domain programs and with experiments, showing a fair agreement. This algebraic expression is used then, in two accom- panying papers, to address relevant problems from a more practical point of view: in the first one, the question of the dynamical compression of risers, with a proper estimative of the related critical load, is analyzed in conjunction with the results here derived; in the second one, the algebraic expression is used to obtain an analytic approximation for the probability density function of the dynamic tension in random waves. © 2001 Elsevier Science Ltd. All rights reserved. Keywords: Dyanainic tension; Risers; Algebraic approximation 1. Introduction Consider a cable, whether it is a riser or a mooring line, hanging from a floating system and resting on the sea floor in the other end. The cable may be made by a junction of different materials, as it is usual in a mooring line config- uration, or it may have some few concentrated buoys or weights or even it can also be exposed to the action of a steady ocean current in the cable's plane. I f the flexural rigidity EJ is 'small', in the sense that its influence can be felt only in the boundary layers where the change in curva- ture is large, then the equilibrium of the cable can be determined assuming EJ= 0, see Ref. [3]. The static con- figuration is defined by the functions { 6{sy,T{s) ], where 6(s) is the angle between the tangent to the cable and the horizontal plane and T(s) is the static tension. If / is the suspended length, the curvilinear coordinate of the point anchored in the floating system is s = l, s = 0 being the coordinate of the touchdown point. Given the static configuration, suppose that a harmonic motion 11(1) = C/oCos(wf) is imposed at the suspended end * CoiTesponding author. Address: Department of Naval and Ocean Engi- neering, EPSUP, Cidade University, CEP 05508-900, Sao Paulo, Brazil. Tel.: 4-55-11-3818-5340; fax: -1-55-11-3818-5717. E-mail address: [email protected] (J.A.P. Aranha). s=l,m the direction of the cable's tangent; it can be shown, see Section 4, that the displacement in the normal direction gives rise to a small correction in the tension and can there- fore be ignored. The displacement 11(1) is due to the action of the sea wave on the floating body and the main objective of the present analysis is to determine the dynamic tension foCi, f) caused by such displacement. From a numerical point of view, the problem is appar- ently straightforward, even more if it is observed that the large viscous damping in the lateral motion eliminates a possible resonant phenomenon. In spite of this, the dynamic tension can be very large: in fact, when either the amplitude UQ of the displacement or the frequency co increases, the viscous dissipation becomes so strong that the cable almost freezes in its equilibrium position. The imposed displace- ment is then absorbed elastically by the cable, see Ref. [9], giving rise to a large value of the tension. In fact, in this limit the elastic tension = EA{UQII + /') can be reached, where EA is the axial stiffness and /' is the effective length of the cable on the ground, see Section 2 for a proper defini- tion; to get an idea about the possible level of tension, if C/o = 4 m and / -f /' = 2000 m the elastic strain ee = C/EA becomes equal to the steel yield strain. There are thus two time scales in the problem, each one related to particular mechanisms for the reactive forces that can be best visualized in limit situations: if the cable is 0141-1.187/01/$ - see front matter © 2001 Elsevier Science Ltd. All rights reserved. PII: 80141-1187(01)00008-6

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Appiieol Ocean Research
E L S E V I E R Applied Ocean Research 23 (2001) 63-81 -
www.elsevier.com/locate/apor
Dynamic tension in risers and mooring lines: an algebraic approximation for harmonic excitation
J.A.P. Aranha*, M.O. Pinto
Department of Naval Engineering, USP, CP61548, Sao Paulo, Brazil
Received 20 June 2000; revised 20 March 2001
Abstract
A riser or mooring line, when excited dynamically at its upper end, resists the imposed displacement by increasing its tension. Viscous damping in the lateral motion is known to be crucial and the resulting problem is thus intrinsically nonlinear. In this paper, an algebraic expression for the dynamic tension, formerly obtained [Polar Engineers, ISOPE'-93 (1993)], is revised and enlarged, once the variation ofthe tension along the suspended length is specifically focused here. The obtained expression is systematically compared with results from usual nonlinear time domain programs and with experiments, showing a fair agreement. This algebraic expression is used then, in two accompanying papers, to address relevant problems from a more practical point of view: in the first one, the question of the dynamical compression of risers, with a proper estimative of the related critical load, is analyzed in conjunction with the results here derived; in the second one, the algebraic expression is used to obtain an analytic approximation for the probability density function of the dynamic tension in random waves. © 2001 Elsevier Science Ltd. A l l rights reserved.
Keywords: Dyanainic tension; Risers; Algebraic approximation
1. Introduction
Consider a cable, whether i t is a riser or a mooring line,
hanging f r o m a floating system and resting on the sea floor
in the other end. The cable may be made by a junction o f
different materials, as i t is usual i n a mooring line config
uration, or i t may have some few concentrated buoys or
weights or even i t can also be exposed to the action of a
steady ocean current in the cable's plane. I f the flexural
r ig idi ty EJ is 'small ' , in the sense that its influence can be
fe l t only in the boundary layers where the change in curva
ture is large, then the equilibrium of the cable can be
determined assuming E J = 0, see Ref. [3] . The static con
figuration is defined by the functions { 6 { s y , T { s ) ], where 6(s)
is the angle between the tangent to the cable and the
horizontal plane and T(s) is the static tension. I f / is the
suspended length, the curvilinear coordinate of the point
anchored in the floating system is s = l, s = 0 being the
coordinate o f the touchdown point.
Given the static configuration, suppose that a harmonic
motion 11(1) = C/oCos(wf) is imposed at the suspended end
* CoiTesponding author. Address: Department of Naval and Ocean Engi
neering, EPSUP, Cidade University, CEP 05508-900, Sao Paulo, Brazil.
Tel.: 4-55-11-3818-5340; fax: -1-55-11-3818-5717.
E-mail address: [email protected] (J.A.P. Aranha).
s=l,m the direction o f the cable's tangent; it can be shown,
see Section 4, that the displacement i n the normal direction
gives rise to a small correction in the tension and can there
fore be ignored. The displacement 11(1) is due to the action
of the sea wave on the floating body and the main objective
of the present analysis is to determine the dynamic tension
f o C i , f ) caused by such displacement.
From a numerical point o f view, the problem is appar
ently straightforward, even more i f i t is observed that the
large viscous damping i n the lateral motion eliminates a
possible resonant phenomenon. In spite of this, the dynamic
tension can be very large: in fact, when either the amplitude
UQ o f the displacement or the frequency co increases, the
viscous dissipation becomes so strong that the cable almost
freezes i n its equil ibrium position. The imposed displace
ment is then absorbed elastically by the cable, see Ref. [9 ] ,
giving rise to a large value of the tension. I n fact, in this
l imi t the elastic tension = EA{UQII + / ' ) can be reached,
where E A is the axial stiffness and / ' is the effective length o f
the cable on the ground, see Section 2 fo r a proper defini
tion; to get an idea about the possible level of tension, i f
C/o = 4 m and / - f / ' = 2000 m the elastic strain ee = C/EA
becomes equal to the steel yield strain.
There are thus two time scales i n the problem, each one
related to particular mechanisms fo r the reactive forces that
can be best visualized in l imi t situations: i f the cable is
0141-1.187/01/$ - see front matter © 2001 Elsevier Science Ltd. A l l rights reserved.
PII: 80141-1187(01)00008-6

64 J-A.P. Aranha, M.O. Pinto / App
loose, for example, i t accommodates the imposed displace
ment by a geometric change in the catenary and the related
time scale is associated wi th the cable's lateral frequency
cüc; on the other hand, a tight cable absorbs the imposed
displacement elastically, wi th a time scale related to the
elastic axial frequency co^. Obviously, these two time scales
coexist i n an actual problem and the numerical scheme has
then to deal wi th discrepant time scales, since in general, as
seen in Section 2, W e » a>c- Discrepancy i n time scales
presents a natural diff iculty for numerical integration, but
this is not.,the only, source of numerical problems in the
analysis. In fact, the discrete system uses lumped masses
that hits the ground in the vicinity o f the touchdown point,
giving rise to iinpact forces that are propagated along the
)cable. These impact forces are spuiious, since they are
caused by the discretization,' and they impose spurious
high frequency components on the dynamic tension that
are not very much attenuated along the cable, unless the
axial damping is very high. Obviously, this effect
diminishes as the mesh size becomes thinner, but for a typ i
cal mesh size the spurious tension, although small compared
w i t h Te, can become noticeable when compared wi th the
static tension, bluixing then the signal of the total tension.
One w i l l have the opportunity to observe this phenomenon
in the few simulations to be shown here and i t is a matter of
concern how to deal numerically wi th these higher harmonic
components, observed also at the suspended end of the
cable. Simply filtering them does not seem to be a wise
solution since, though spurious in the continuum context,
they are innate to the discrete models and, once excited, the
higher hariuonics interact nonlineaiiy, affecting the energy
of the fundainental hartnonic.
These critical remarks about the numerical solutions
j should be looked into a proper perspective: they do not
imply that numerical results are useless and, as a matter of
fact, numerical simulations have been extensively used, in
the present paper and in the accompanying ones, as a refer
ence for the analytic results. Although recognizing the
usefulness o f these solutions, wi th their numerical robust
ness and broad generality, the intention here was to draw the
attention to some more subtle aspects o f the cable dynamics
that can be relevant in certain cucumstances.
On the other hand, the same discrepant time scales that
cause numerical trouble can be explored to obtain asympto
tic solutions for the cable dynamics. The basic idea is mot i
vated by the fact that, as seen i n Section 2, the imposed
frequency w is of the order of tnagnitude of the cable's
lateral frequency and so, in general, ca ̂ (o^. I f now k
is the axial wavenuiuber related to w then, f r o m the defini
t ion o f the axial wave velocity, one has = &)//c = tajk^,
,' In fact, it can be shown (see Ref, [3]) that in the coiüimiousproblem the
cable in general 'rolls' in the ground without striking it. This result is
confirmed by the experiments, since the observed time record of the tension
does not show any evidence of higher harmonics, even when the cable
slackens; see Section 3 of this work.
Ocean Research 23 (2001) 63-81
with /fe ~ TTII + l' being the wavenumber of the first axial
natural mode. I t turns out that k{l + / ' ) ~ TT{IJ)IU)^) < 1,
showing that the natural length scale for the axial dynamic
tension is much larger than the cable's length; i n first
approximation, then, the dynamic tension can be assumed
constant along the cable's length and i t can be obtained
f r o i n the overall dynamic equilibrium of the cable. This is
the basis o f the algebraic approximation derived i n Ref. [2]
where, i n essence, the dynamic equations are integrated
along the suspended length to obtain a closed f o r m expres
sion for the dynamic tension.
However, one point was not satisfactory, mainly for an
almost vertical riser: for these geometries the variation o f
the dynamic tension along the cable is indeed small, when
compared to the reference tension T^, but i t can be appreci
able when compared wi th either the static tension or the
dynamic tension at the touchdown. From a more practical
point o f view, then, the variation of the dynamic tension
along the cable must be evaluated and one o f the purposes
in the present work is to present such 'second order' correc
tion. The other intention was to show, in a more systematic
way, comparison wi th numerical results obtained wi th
different programs, calling the attention to the observed
discrepancies when they happen and commentating them;
at the same time, both the numerical results and the alge
braic expression are compared wi th a set of experimental
results, disclosing some of the numerical misbehavior
described above.
This paper has been organized wi th the objective to focus
the attention on these issues, placing then in a secondary
plane the mathematical derivation of the algebraic expres
sion. For this reason. Section 2 presents directiy, besides
some definitions, the final algebraic expression for the
dynamic tension, the discussion being restricted there to
some simple physical arguments that can help to interpret
the final result; Section 3 is dedicated to a more systematic
comparison wi th experiments and numerical results, wi th
some pertinent discussion o f the results. Only i n the Appen
dix the detailed mathematical derivation of the algebraic
expression is addressed.
2. The algebraic expression for the dynamic tension
Consider a cable fixed at the floating system i n a certain
point S and touching the sea floor at a point O; i f ^ is the
curvilinear coordinate, w i th ^ = 0 at O and ^ = Z at 5, then I
is the suspended length of the cable. The static configuration
is defined by the coordinates {x{sy,z{s)) satisfying the
geometric equations Axids = cos0{s); dz/ds = s in0(5) , w i t h
6{s) being the angle between the cable's tangent and the
horizontal axis. Let q be the submerged weight per unit o f
length of the cable and Tis) its static tension, wi th particular
values defined below:
Ts = T{1), To = r ( 0 ) . (2.1a)

J.A.P. Aranha, M.O. Pinto /AppUed Ocean Research 23 (2001) 63-81 65
Let also A/ be the length o f the cable resting on the sea
floor, that is, the distance between the anchor A and the
touchdown point O, and fji the f i i c t i o n coefficient between
the cable and the soil. I f the length To/inq is smaller than AZ
then, obviously, the static tension is zero in the interval
—AZ :S i ' :S —To/ixq and the effective length of the cable
on the sea floor w i l l be Tol/Mq. Denoting by Z' this length,
and observing that the whole cable is stretched when
AZ < TQ/M' then
Mm{M; To/iJLq). (2.1b)
The effective length enters in the problem through the
definition of the elastic tension T^. As seen i n the Introduc
tion, this tension appears at the 'freezing condition' , where
the imposed displacement is absorbed elastically by the
cable in a quasi-static way; i n this perspective, the definition
given in Eq. (2. l b ) seems to be the most natural one even fo r
the dynamical problem, as discussed i n Section 4.
. 'The cable's curvature is defined by the function
ds T, (2.2a)
where is directly determined f r o m the static configura
tion; as i t is shown in Section 4, the lateral harmonic displa
cement v(s) is, i n first approximation, proportional to the
curvature and so v{s) oc^i{s). This result w i h be used
below..
Finally, the horizontal ocean current, projected in the
plane (x,z), is given by the vector
Vciz) = V,xMs))i, (2.2b)
where is the ciUTent intensity at the sea level and Xc(z(A)
is the current profile along the cable.
2.1. Static parameters
Obviously, the dynamic response depends on the cable's
static configuration and, i n the context of the proposed
asymptotic approximation, a l l static information can be
synthesized in some few integral parameters to be intro
duced next. The first two of them are defined by
ƒ„ = \XiiA\"<is; n = 2,3. (2.3a)
I t is not diff icul t to explain the physical origin of these
integrals. In fact, since the lateral dynamic displacement is
proportional to the static curvature (v ( j ) oc ; ^ i ( 5 ) ) , then the
inertia force, integrated along the suspended length, should
be proportional to Io i n order to preserve the cable's lateral
kinetic energy; for the same reason, the integrated viscous
damping should be proportional to ƒ3 i n order to preserve the
dissipated power in the lateral motion.
However, i n the presence of a strong horizontal ocean
current V^xdziA) the dynamic viscous force is, i n first
approximation, proportional to V^xdzis)) X sin 9 (s)Xv{s)
and then the dissipated power should be proportional to
the integral 1^, where
\xMs)) sme{s)\ /^{s) ds. (2.3b)
I t remains to define a parameter related to the restoring
forces. As mentioned in the Introduction, there are two
mechanisms for the cable to react to any imposed displace
ment: the first, by stretching the cable; the second, by adjust
ing the geometric configuration of the catenary. The ratio
between these two restoring forces is known to be crucial in
the cable dynamics and i t is proportional to the coefficient
A ^ where (see R e f [6])
A 1/2
( z + z'
1/2
(2.3c)
For a loose cable, where the tangent at the suspended end
is almost vertical (Ö(Z) ~ trll), one has ql = Ts and, since
EA/Ts > 1, then yl > 1 in this situation; typically A « 50
f o r a loose cable. For a tight cable, where the angle w i th the
horizontal is small at the sea level (Ö(Z) <C Tr/2), vertical
equil ibrium implies in ql/Ts = sin0(Z) <C 1 and then / I ~ 5.'
Those are the only parameters that depend directly on the
static configuration o f the cable, the remaining ones, to be
defined next, depending on the dynamic properties o f the
cable and on the imposed excitation.
2.2. Dynamic parameters
For a heterogeneous cable, as a mooring line usually is,
the weight q{s), mass m(s), added mass /na(i'), diameter D{s),
stiffness EA(s) and drag coefficient CY){S) change along the
suspended length. Enforcing conservation of kinetic energy,
and recalling that v (5 ) oc Xi(s), the averaged mass and added
mass fo r the dynamic problem can be defined by the
expressions
ri
m; ni„ 1 1
h i
D = 4;?Za
pit
{m{sy,mJ,s)}Ai{s) ds.
q(s) ds; (2.4a)(
E A Z Jo
ds
EA{s)'
w i t h D being the equivalent diameter and {q;EA} the aver
aged weight and stiffness. In a similar way, enforcing
conservation o f the dissipated power, the averaged drag
coefficients are defined by
^ _ 1 1 ' C ^ i s ) ^ \ X i i s f d s , 0 D
C f c V ) ^ \ X c ( z i s ï ) sme(,s)\Aiis) ds,
(2.4b)
where CD,O is to be used in the absence of an ocean cuiTent
and CD,C when the ocean current is strong; a more
(

66 J.A.P. Aranha, M.O. Pinto /Applied Ocean Research 23 (2001) 63-81
appropriated definit ion for the drag force in an intermediate
situation is introduced in Section 4. The related damping
coefficients are given by the expressions
here
So ^ 2CD.O PTTD'IA TS h f^u
37r ' 77 m + m„ ql II D
(2.5).
2CD,e p7rDV4 2V^
TT in + lUr^ ct)D I2 '
with CÜ being the frequency of the imposed displacement
and (Tu its rms value, see Eq. (2.7a).
As discussed in the Introduction, there are two time scales
related to the distinct mechanisms for the restoring forces;
ithe associated frequencies are
7T
I V in
T,
l + l'
E A
in (2.6)
The frequency co^ is the natural frequency of an horizon
tal cable wi th length I subjected to the traction Ts and wi th
mass in + in^; the frequency co^ is the elastic axial frequency
of a cable wi th length / + / ' , axial stiffness E A and mass in.
Obviously, they are not the actual natural frequencies of the
cable, neither they intended to be: they serve only as
reference values. I n this context, in particular, i t can be
checked that WJCD,, =^ (Ts/EA)"^ < 1, as anticipated in the
Introduction.
From some simple considerations it is not di f f icul t to
estimate the order o f magnitude of u)^. In fact, f r o m the
equihbrium of a catenary one has Ts = qUsindQ) and,
since q = {in — in^g for an homogeneous cable, then
TT(g/hy^, where the water depth h is assumed o f
j order o f the suspended length /. I t turns out that = 2TTI
öJc « 2{h/gy'^ 20 s. for a water depth h « 1000 m and the
wave frequency <u is of order of magnitude of co^, imply ing
in ft)/öJe < 1. This is the essential assumption in the derived
asymptotic approximation fo r the dynamic tension, as
discussed in the Introduction and further elaborated in the
Section 4. Also, notice that the dynamic excitation is
iiuportant only in deep water: in shallow water {h ~ 10 m)
one has, in general, w <C Wc and the cable response is
quasi-static.
2.3. Excitation parameters
The dynamic motion of the cable is excited by the displa
cement U(t) = UQCOs{cüt) imposed at the suspended end S
in the tangent direction. Instead of using the displacement
amplitude UQ the fo l lowing parameters w i l l be introduced
o-v' (2.7a)
where CTU is the rms of the imposed displacement and a is
the normalized 'wave envelop'. The reason for this is solely
editorial: Eq. (2.7a) can be extended directly to a random
excitation, to be addressed in an accompanying paper. The
elastic tension T^ is defined accordingly by
re = E A l + l'
(2.7b)
while the information about the imposed wave frequency (o
can be introduced through the non-dimensional parameter
(2.7c)
Notice that for the same value of w/Wc the reduced
frequency f l is larger for a tight cable, where A is smaller.
As expected, this means that the 'freezing situation', where
the imposed displacement is absorbed elastically, is more
l ikely to occur in a tight cable than in a loose one.
2.4. The algebraic expression for the dynamic tension
As discussed in the Introduction, the dynamic tension is
essentially constant along the cable when w/We <C 1. Under
this same condition i t is also possible to show that the lateral
dynamic displacement is, i n first approximation, propor
tional to the static curvature, or v{s) = Vxi{s), where V is
the displacement amplitude and X\iA is defined i n Eq.
(2.2a). W i t h i n this approximation, i t fo l lows that the rele
vant dynamic variables are reduced to two discrete values,
the amplitudes of the dynamic tension and of the lateral
displacement. Integrating the equi l ibr ium equations in the
transversal and axial directions, together w i t h the equation
fo r the geometric compatibility, one obtains, wi th the help
of the integral parameters introduced in Section 2 .1 , two
algebraic equations wi th these two unknowns. Solving this
system the dynamic tension can be determined. The math
ematical derivation is elaborated in Section 4, the final result
being given below. In this way, i f the dynamic tension is
written in the fo rm
T^{s,t) = Tj,{s)
T D ( ^ ) = ^ = < ^ ) e ' * ^ - \
(2.8a)
i t can be shown that the non-dimensional dynamic tension
amplitude r{s) is given by
Tis)
(^^b\n) + {AclinAa' - b{n)^\2c2(s)(jbHn) + mlinAa^ - b{n)^ (4^o ' / ^ ' )
(2.8b)

J.A.P. Aranha, M.O. Pinto / Applied Ocean Research 23 (2001) 63-81 67
with
b{a) 1 - n 2 \ 2
c , ( ^ ) = 1 -
1 + Or 1 + AA
l 2
+ fcClis).
(2.8c)
Notice that Eqs. (2.8a)-(2.8c) already incotporates the
variation of the dynamic tension along the suspended
length. In general this variation is weak, since the term in
s/l is mult ipl ied by the small parameter (w/we)^, but in
certain circumstances, when /2 ^ 1, i t luay becotne impor
tant, as discussed below.
I t seems worthwhile at this point to analyze Eqs. (2 .8a)-
(2.8c) in some l imi t situations, v,'here then the obtained
result can be more easily inteipreted. In this way, consider
Eq. (2.8a) when ü > 1 (but keeping w / « e <C 1). W i t h an
e i T o r of the f o r m [1 - I - Odca/coA; 1//^^)] one has
[ciis) = 1; bin) = C2is) = 1 + cl} and so, f r o m Eq. (2.8b),
it ' fo l lows that T{S) = a. Also, when CTU/D :§> 1 one has
^0 > 1, see Eq. (2.5), and then f r o m Eq. (2.8b) i t fo l lows,
w i th an error o f the f o r m [1 + 0{{co/a}^)^; D/au)], that again
ris) = a. I n both cases one obtains (see Eqs. (2.7a) and
(2.7b))
\TD(S) E A ^0
l + l'' (W/M,; UQID) > 1, (2.9a)
that is exactly the result anticipated at the Introduction: the
elastic limit can be reached when either the imposed ampli
tude or the wave frequency becomes large.
I n the other l imi t , when /2 < 1, one has b ( i l ) = 1/
> 1 and f r o m Eq. (2.8b) i t fol lows, wi th an eiror of
the f o r m [1 + 0{n% that
'T{S) = {C,{S)CW + C2{s)) an''.
C2{S)
(2.9b)
t,c,{s). {n<\)
There are two situations where n can become small:
one, when the iiuposed frequency is effectively low and
w/coc ^ 1; the other, when the cable is loose {A :§> I ) and
n can be small even when w/Wj. s 0(1) . The first case is of
l i t t le importance in deep water and, furthermore, this l i m i t is
not wel l described by Eq. (2.9b): when w/wc 1 one
should use a quasi-static solution, as described in Ref. [2]
and discussed in Section 4. However, i f A is so large that
Aiiojw^ = 0{\), as i t may happen in a loose cable, the
dynamic tension is in fact small when compared wi th the
elastic tension Te, since T = 0(n~) <€. 1, but the variation o f
T(S) along the suspended length cannot be disregarded, once
dc2/ds = 0 (1) . Furthermore, although small when compared
to Te, the dynamic tension may be comparable to the static ,
tension and should not be ignored.
The algebraic expression (2.8a)-(2.8c), albeit siiuple,
recovers qualitatively the main features of the dynamic
tension in a submerged cable. I f i t is also shown that it is
quantitatively consistent, then i t provides an interesting
simplification for the proposed problem, wi th possible
imbrications in others directions too. The quantitative
aspect w i l l be addressed next, the possible imbrications
being reserved to the accompanying papers.
3. Experimental and numerical verification of Eqs .
(2.8a)-(2.8c)
In this section the algebraic approxiiuation (2.8a)-(2.8c)
for the amplitude o f the dynamic tension is compared wi th
some experiments and wi th numerical results obtained f ro iu
two distinct time domain programs. Only a survey of this
rather extensive set of comparisons w i l l be presented here,
the intention being to show the typical adherence among '
these results and to draw attention, in certain particular
cases, to some observed disagreements, commentating
them in the l ight o f the perturbations introduced on the
continuous models by the discretization.
3.1. Experimental results
In a research project sponsored by Petrobras, Ref. [1]
analyzed at the USP wavetank the dynamic behavior of
mooring lines; i n the experiments, a chain, anchored in a
point on the wavetank fioor, was excited dynamically at the
suspended end. The imposed motion was harmonic, the
displacement being either along a straight line or else circu
lar, and the measured output was the total tension at the
suspended end. T w o different chains, wi th relatively dis
crepant properties, were tested in several geometric con
figurations and the dynamic excitation varied too, in
amplitude, frequency and type o f motion ( i f straight or
circular). Around a hundred different tests were made and, (
obviously, only a small sample of them w i l l be discttssed
here. However, the results to be presented are typical, being
representative of all experiments realized.
The relevant physical properties o f the two chains are
given in Table 1 and the static configuration can be char
acterized by the geometric parameters {h; 6^; I j ) , where h is
the water depth, 9^ =• 9(1) is the angle at the suspended end
and I j the total chain length; since the f r ic t ion on the wave-
tank floor can be ignored, l' = I j — 1.
Table 1
Physical properties of the two chains (Ref. [1])
Chain EA (N) q (N/m) D ( m ) m (kg/m) H(j (kg/ra) CD
1 4763 0.360 0.0026 0.042 0.013 1.6
2 17664 0.865 0.0041 0.088 0.027 1.6
(

68 J.A.P. Aranha, M.O. Puito/Applied Ocean Research 23 (2001) 63-81
(a) 2,5
3
1.5
1
0.5
4 Tmax /To
4 Tmin +
'1=
3,5
3
2.5
2
1.5
1
0.5
T / T , H)/D=14.33 A=7.66
Tm fiK /T
Tmin/Tj
0.01 0.1 1 f(Hz) 0.01 0.1 1 f(Hz)
(b)
0.03
0.025
-0.005
5 4.5
4 3.5
3 2.5
2 1.5
1 0.5
0 -0.5
i Tmax/T., j
+
i m i n / I s
0.01 0.1 1 f(Hz)
-1 1 1 T
Experim. 2.8
4 5 6
T i m e (s)
10
Fig, 1, (a) Total tension at the suspended end. Experiments (4-); Eqs. (2.8a)-(2.8c) (- - - ) . (a) UJD = 7,91; (b) Ua/D = 14,33; (c) U^D = 24.21. Chain 2,
A =7,66. (Source: Ref. [1]), (b) Variation of tension in time: experiment (—); Eqs. (2.8a)-(2,8c) ( - - - ) f/o = 0,076 m; ƒ = 0,658. Chain 1, {h =
1.82 m;es = 13.8°;/T = 28.73 m), yi =2 .6 .
The first set of resuhs, presented in Fig. l a , shows the plot
o f the maximum and min imum values o f the total tension in
a cycle as a funct ion of the imposed frequency ƒ (Hz). The
tension has been normalized by the static value T^, see
Eq. (2.1a), and the theoretical values have been determined
by the expression = 1 ± T{Ï){TJTS), wi th T ( / )
given by Eqs. (2.8a)-(2.8c) and by Eq. (2.7b); obviously.
when rmin resulted negative in this expression then the value
Tmin = 0 was taken, since the chain cannot support any
compression. In al l tests o f Fig. l a chain 2 was used i n
the static configuration given by (/; = 2.02 m; 0s = 11-2°;
/ T = 20.3 m) , and only the amplitude t/o of the imposed
circular motion was changed, as defined in the figure
caption. The agreement between the experimental and

J.A.P. Aranlia, M.O. Pinto / AppUed Ocean Researcli 23 (2001) 63-81 69
theoretical values is quite good, even more i f i t is observed
that in several cases, identified by the result T^in = 0 at the
suspended end, the chain slackens as a whole. This is really
a demanding test for the algebraic approximation: i n fact,
the larger influence of the geometric nonlinearity is
expected to happen for a tight cable (small 0s) under strong
dynamic excitation, as in the cases tested, but the alge
braic approximation does not include this nonlinearity,
the only nonlinear term i n Eqs. (2.8a)-(2.8c) being the
viscous dissipation, see Section 4. The observed concor
dance shows that the geometric nonhnearity is, indeed,
o f httle concern for this class o f problems. The only
point that deserves a further comment is the f o l l o w i n g :
as explained in Section 4, Eqs. (2.8a)-(2.8c) ceases to
be val id in very low frequency, where a quasi-static solution
must be used; the two horizontal lines in Eig. l a represent
just this solution. This low frequency correction has not
been incorporated in the final solution because it has li t t le
importance in deep water.
I n order to display the generality o f the experi
mental results and, at the same time, to point out
some more subtle aspects o f the problem. Fig . l b
shows, for- a different chain i n a distinct geometric
configuration, the variation in time of the total tension
at the suspended end. Again, a close agreement is observed,
indicating now that the cable's response is i n fact 'harmo
nic ' , the experimental result not showing evidences of
higher harmonics.
This same problem was solved by a time domain
numerical program, see Fig . 2a. The overall response
is comparable to the experiment, although two peculia
rities are conspicuous and should be commented: first, i t
is now clear the evidences of higher harmonics; second,
the tension becomes negative in a short t ime interval, i n
spite of the fact that the chain cannot support a
compressive force. Both phenomenons cannot be real,
since they do not appear in the experiments, and so
they must be due to the discretization. A possible expla
nation f o r the observed higher harmonics is the impact
forces on the ' lumped ' masses when they h i t the
ground: they give rise then to high frequency oscilla
tions that are propagated through the cable w i th a small
dissipation, unless the axial damping is assumed to be
very large. This may be indeed one of the resons why
numerical codes sometimes encounter difficult ies to
converge when the sea floor is r ig id , the numerical
integration becoming easier when the ground is assumed
'soft ' . These higher harmonics, although spurious in the
continuum problem, are innate in the discrete system and
so, once generated; they interact w i th each other b inning the
tension signal. As an example, Fig. 2b shows, for a random
excitation, the time history o f the touchdown tension o f a
riser wi th EJ = 0.
Notice not only the large magnitude o f the (unduly)
compression but also how the higher frequency components
apparently enhance the value o f the maximum tension.
(a)
I 7 I 8 9Ï 10 I 11 121 13 I 1 14 15 lfe
Time (s)
700 720 740 760 780 800 820 840 860 880 900 Time (s)
Time (s)
Fig. 2. (a) Same as Fig. lb but obtained from a time domain program
(Orcafiex). (b) Tension at the touchdown of an actual riser in random
excitation. EJ = 0. (c) Compressive force as a function of the mesh size
ÓS (same problem of (b)).
Furthermore, i f EJ 0, as it is usually, some compression
is acceptable, although i t is not known a pr ior i how much.
This is the main motivation o f the accompanying paper on
dynamic compression.
Table 2
Parameters of the risers simulated by Orcaflex and Cable (friction
coefficientiytt = 0.4; axial damping: f A X I A L = 10%)
Dim) ni (kg/m) BA (kN) BJ (kN m^)
(FR) 0.2160 67 1.92 X 10^ 9.84 1.0
(SR) 0.2191 70 2.10X 10^ 9241 1.1

70 J.A.P. Aranha, M.O. Pinto/Applied Ocean Research 23 (2001) 63-81
Table 3
Parameters of the heterogeneous mooring line: Chain 1-Cable-Chain 2 (friction coefficient:/it = 0.4; axial damping: f AXIAL = 10%)
m (kg/m) '"a (Kg/m) q (kN/m) EA (kN) ö ( m ) C D I Am)
Chain 1 203 27.58 1.920 7.94 X 10' 0.095 2 3800 Cable 49 9.56 0.387 5.37 X 10' 0.109 2 lOOO Chain 2 160 21.56 1.513 6.27 X 10' 0.084 2 200
Table 4
Cun'ent profile on the simulations (z* = h~z; / ! = 1000 m)
z' (m) 0 50 too 140 230 340 415 545 640 785 1000
y(m/s) 1.70 1.54 1.39 1.18 0.72 0.78 0.01 -0.28 -0.36 -0.53 0,00
i t is certainly expected that this numerical i l l behavior
should disappear as the mesh size becomes thinner. As an
example, Fig. 2c retakes the problem of Fig. 2a, showing
that indeed the compressive force tends slowly to zero as the
mesh size diminishes. On the other hand, and this is shown
clearly in Fig. 2b, i t is not uncommon to use, i n a real
problem, a reasonably small mesh size and, in spite of
this, to obtain a response where high frequency oscillations
and a compression force above the 'c i i t ical value'^ appear
in a somewhat strong way, maldng dif f icul t to assess the
coiTect behavior o f the cable's dynamic. I t can be argued
that these differences are o f little concern in a real design of
a cable, and one should agree wi th this observation i n most
cases; however, they may become important when the
numerical solution is used as paradigm to ver i fy the quality
o f the analytical approximation, and this is the point o f
concern here. More is going to be said about this question
i n the Section 3.2.
3.2. Numerical results
Two cables, one representing a flexible riser (FR) and the
other a steel riser (SR), wi th typical parameters defined in
Table 2, were numerically simulated under distinct environ
mental conditions using two different time domain
programs, Orcaflex and Cable respectively. I n this section,
the obtained numerical results are compared wi th the alge
braic approximation (2.8a)-(2.8c) i n order to check not only
its val idi ty but also to display some particular features that
deserve comments.
A heterogeneous mooring line, w i th properties defined in
Table 3, see Eqs. (2.4a) and (2.4b), was also numerically
simulated and the result is here compared to Eqs. (2.8a)-
(2.8c). To complete the verification o f the theoretical result
it would be necessary to check the behavior of a cable wi th
concentrated forces, due to either a buoy or a weight, but this
case has not been addressed in the numerical analysis. A
simple catenary configuration was assumed in ah simulations.
The f r ic t ion coefficient between the sea floor and the
cable and the axial damping factor were always the same,
^ An analytical expression for this critical load P„ is derived in the
second paper of this series. Obviously, for the chain one has that Pcr = 0.
respectively /A = 0.4 and f A x i A L = 1 0 % ; also the cable's
total length was so large that the effective length was almost
always^ given by / ' = TQIIXQ. The imposed motion at the
suspended end was circular, harmonic, wi th amplitude A
and period P = ITT/CÜ, and the static configuration was iden
t i f ied by the angle ds at the suspended end. The horizontal
ocean current, when present, had a depth profile defined in
Table 4, typical of Campos Basin.
3.2.1. Numerical results: flexible riser (h = 1000 m)
Fig. 3a and b present, for the flexible riser, the dynamic
tension at the touchdown as a funct ion of the angle 9s o f
the static configuration. The wave period was kept constant,
given by P = 11.5 s, and two distinct amplitudes for the
circular motion were assumed: A = 2.77 and 5.54 m. The
water depth was 1000 m and the dynamic tension Tp was
normalized by the tension (TQ + TR), where TQ is the static
tension at the touchdown and 10 tons is a reference
value given by the fabricant; obviously, the simple relation
TQ/TQ becomes unbounded when 9s —> 'n/2 and it was thus
avoided. In Fig. 3b the angle 9s is the one observed i n the
absence of a c u i T e n t ; after the current is 'turned on ' the static
configuration is changed and the parameters (2.8a)-(2.8c)
are then computed.
I n both cases (w/o or w/ current) the agreement between
Eqs. (2.8a)-(2.8c) and the numerical results f r o m Orcaflex
is fa i r ly good for the smaller amplitude A = 2.77 m; for the
larger amplitude the general trend is similar but the discre
pancies are obviously more apparent. Fig. 4a helps to
explain this fact: here the static configuration and the period
were kept constant {9$ = 80.5°; P = 11.5 s) but the imposed
amplitude was changed. For the smaller amplitudes the
agreement among the numerical results themselves,
obtained f r o m Cable and Orcaflex programs,'' are good,
and so they are wi th Eqs. (2.8a)-(2.8c); however, as the
amplitude increases the concordance wi th Eqs. (2.8a)-
(2.8c) deteriorates, i n general, but so i t does among the
numerical results. Furthermore, the algebraic approximation
^ When this condition is not fulfilled the total length Ij is given in the
figure caption.
"* Details about the Cable program can be found in Ref. [5] and some
discussion about the Orcaflex program in Ref [7].
J.A.P. Aranha, M.O. Pinto /Applied Ocean Research 23 (2001) 63-81 71
(b)
45
65 70 75
Top Angle (deg)
50 55 60 65 70 75
Top Angle (deg)
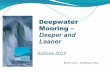
Fig. 3. (a) Dynamic tension at the touchdown (FR) as a function of ds. (w/o current; P = 11.5 s). (—) Eqs. (2.8a)-(2.8c); Orcaflex (O) , (b) Dynamic tension at
the touch down (FR) as a function of 8s. (w/current; P = 11.5 s). (—) Eqs. (2.8a)-(2,8c); Orcaflex ( O ) .
predicts a response somewftere in between the two numer
ical results. The impact forces on the discrete masses are
possibly the reason fo r the observed deterioration when the
amplitude increases: in this case, they generate at the touch
down high frequencies oscillations that are propagated
along the cable wi th a relatively small damping,^ and so
they are weakly attenuated. To check this assumption, the
highest point in Fig. 3a, coiTesponding to (A = 5.54 m;
For a Rayleigh damping of the form dSvldt, the damping factor becomes
indeed very small in high frequency even when f AXIAL = 10% for the basic
mode.
ös = 80.5°; P = 11.5 s), was simulated again using now an
axial damping three times larger. The obtained result, also
shown i n Fig. 4a, indicates that wi th this higher damping the
concordance between Orcaflex and Eqs. (2.8a)-(2.8c) is
much better. Notice that in the Cable program the founda
tion was assumed to be soft while in Orcaflex i t was
assumed to be r ig id and, also, that the discrepancies increase
just when T^TQ> \ , namely, when the cable becomes
dynamically compressed.
I n the other hand, one should expect that the influence o f
these higher harmonics diminishes when both the static and
dynamic tensions become large and the riser is not

72 J.A.P. Aranha, M.O. Pmto /Applied Ocean Research 23 (2001) 63-81
compressed at the touchdown. Fig. 4b gives support to this
conclusion, once i t displays the dynatnic tension at the
touchdown point as a function o f the atuplitude for
(ös = 37.8°; P= 11.5 s): although the maximum amphtude
is now twice the one imposed in the other case, the agree
ment is very good here, among the numerical results them
selves and wi th Eqs. (2.8a)-(2.8c) too.
Fig. 5 presents the dynairiic tension at the suspended end
normalized by the static tension Ts as a function of the
amplitude, keeping constant (0s = 70°; P = 1 2 s ) . The
agreement is again fair enough for the smaller amplitudes
but i t becomes evidently discrepant fo r the larger ampli
tudes. In this same figure a fourth curve was plotted,
named 'Orcaflex filtered': i t corresponds to the sum of
the two first harmonics of the Orcaflex response.
Al though the Orcaflex result seeius to be lost fo r the
(a)
1^
o o 0
2.8 Orcaflex ,5=10% Orcaflex r=30% Cable
3 4 5
Amplitude (m)
(b)
1 r
0.9 -
0.8 -
0.7 -
0.6 -
.0 0.5 -
•
t -0.4 -
0.3 -
0.2 -
0.1 -
0 -
2.8 0 Orcaflex
• Cable
10 12 14
Amplitucie (m)
Fig. 4. (a) Dynamic tension at the touchdown (FR) as a function of amplitude (ös = 80.5°; P = 11.5s.; w/o current): (—) Eqs. (2.8a)-(2.8c); ( O ) Orcaflex;
( • ) Cable; (*) Orcaflex with f AX!AI, = 30%. (Note: two first points of Cable and Orcaflex are coincident), (b) Dynamic tension at the touchdown (FR) as a
function of amplitude (0s = 37.8°; P = 11.5 s; w/o current); k = 2800): (—) Eqs. (2.8a)-(2,8c); (O) Orcaflex; ( • ) Cable. (Note: last six points of Cable and
Orcaflex are coincident).

J.A.P. Aranhn, M.O. Pinto /Applied Ocean Research 23 (2001) 63-81 73
highest amplitudes, since the dynamic tension decreases
then when A increases, i t should be noticed the close
adherence between the fihered response and Eqs. (2 .8a)-
(2.8c), possibly indicating that the disagreement is due to
the high frequency components.
This conjecture can be better visualized with a look to the
corresponding time record in one period. Fig. 6a and b
present, fo r A = 2 m , the total tension at the touchdown
and at the suspended end normalized by the respective
static tension as a funct ion o f the time. The agreement
between the two numerical results and Eqs. (2 .8a) -
(2.8c) is quite good here, although i t should be observed
that i t is less good at the suspended end: the Cable
result is a l i t t le b i t o f f and the Orcaflex time series
shows evidences o f a s t i l l incipient higher harmonics.
This trend has been almost always observed, the agree
ment between the numerical results (and w i t h
Eqs. (2.8a)-(2.8c)) becoming worse, i n general, at the
suspended end. Fig . 6c and d repeat the same plots but
f o r A = 4 m . N o w Orcaflex results show the presence of
strong high frequencies oscihations whi le Cable results,
perhaps due to the soft foundation used, show a rela
t ively smooth time series. However, the experimental
results shown i n Section 3.1 indicate that these high
frequencies oscillations are i n fact spurious, the i n f l u
ence o f the soil stiffness being important only fo r the
discrete systems (recall that i n the experiments the fllor
was r ig id) . Fig. 6c and d show, again, that the agree
ment is worse at the suspended end and that the ' f i l tered
response' is closer to Eqs. (2.8a)-(2.8c).
3.2.2. Numerical results: steel riser (It = 900 m)
Fig. 7a and b show the plot of the dynamic tension at the
touchdown point normalized by the static tension for a steel
riser (SR). In Fig. 7a the static cotifiguration is kept constant
(ös = 80.5°) and the tension is plotted as a funct ion of the
frequency for different amplitudes; i n Fig. 7b the period is
kept constant (F = 8 s) and the tension is plotted as a
fut ict ion of ös fo r different amplitudes. The agreement is
fa i r ly good in general, the e i T o r having a tendency to be
magnified for the larger ös (smaller TQ) i n Fig. 7b.
Fig. 8 shows the plot o f the dynamic tension at the
suspended end normalized by the static tension I's as a
function of the amplitude A ; in all cases (ös = 70°;
12s). The agreement between the two numerical results
and Eqs. (2.8a)-(2.8c) is again good for the smaller ampli
tudes but they become widely discrepant f o r the larger
amplitudes, mainly the Cable result. The concordance
between Orcaflex and Eqs. (2.8a)-(2.8c) is fair, although
the Orcaflex result shov/s a tendency to an inf lexion point,
similar to the one observed in Fig. 5. Again, the behavior at
the suspended end is worse than at the touchdown point but
this is not restricted to expressions (2.8a)-(2.8c): as i t is
clear f r o m the material presented here, the numerical results
themselves become more discrepant at the suspended end
for a reason not yet we l l understood. A possible explanation
is the intense presence of high frequencies oscillations at
this point, perhaps due to the small damping i n the axial
direction.
3.2.3. Numerical results: heterogeneous line (h = 1000 m)
The heterogeneous line defined i n Table 3 was simulated
by Orcaflex in the condition (ös = 58.5°; P = 10 s) for
different amplitudes of the tangent motion. Fig. 9 shows
the comparison wi th Eqs. (2.8a)-(2.8c) of the obtained
dynamic tension, normalized by the respective static
tension, both at the suspended end (TOP) and at the touch
down point (TDP). The agreement is fair at the TDP, the
74 J.A.P. Aranha, M.O. Pinto / Applied Ocean Research 23 (2001) 63-81
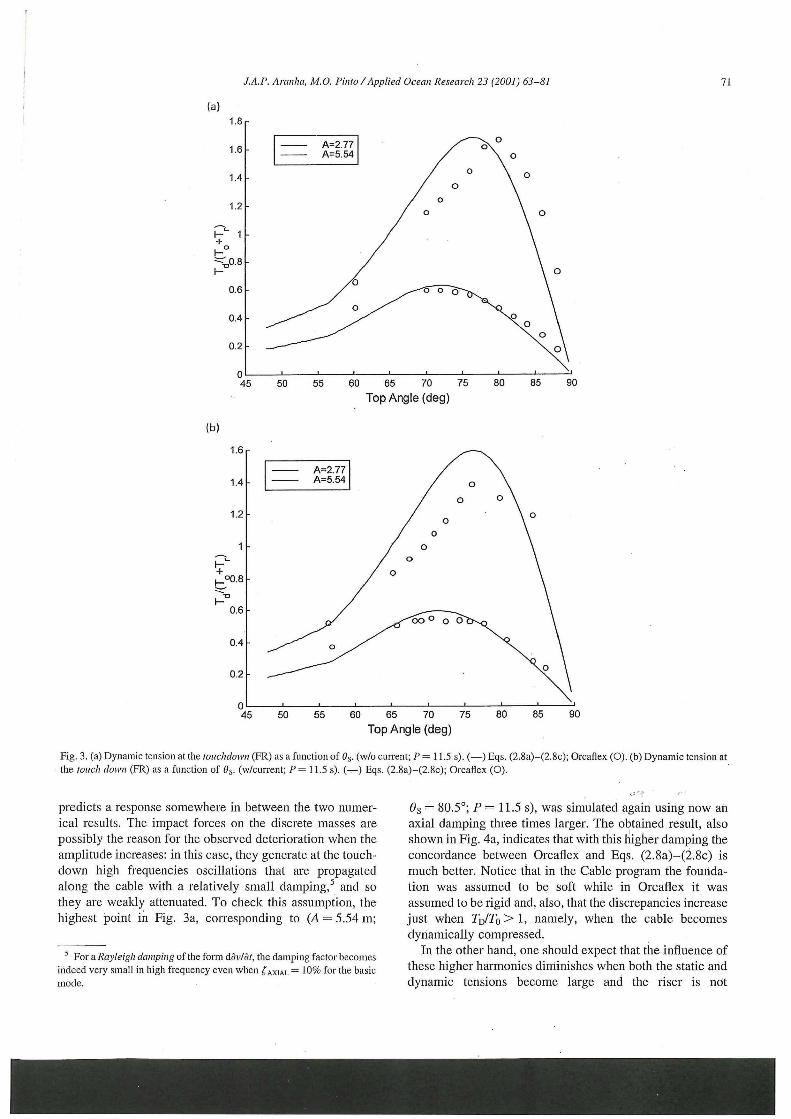
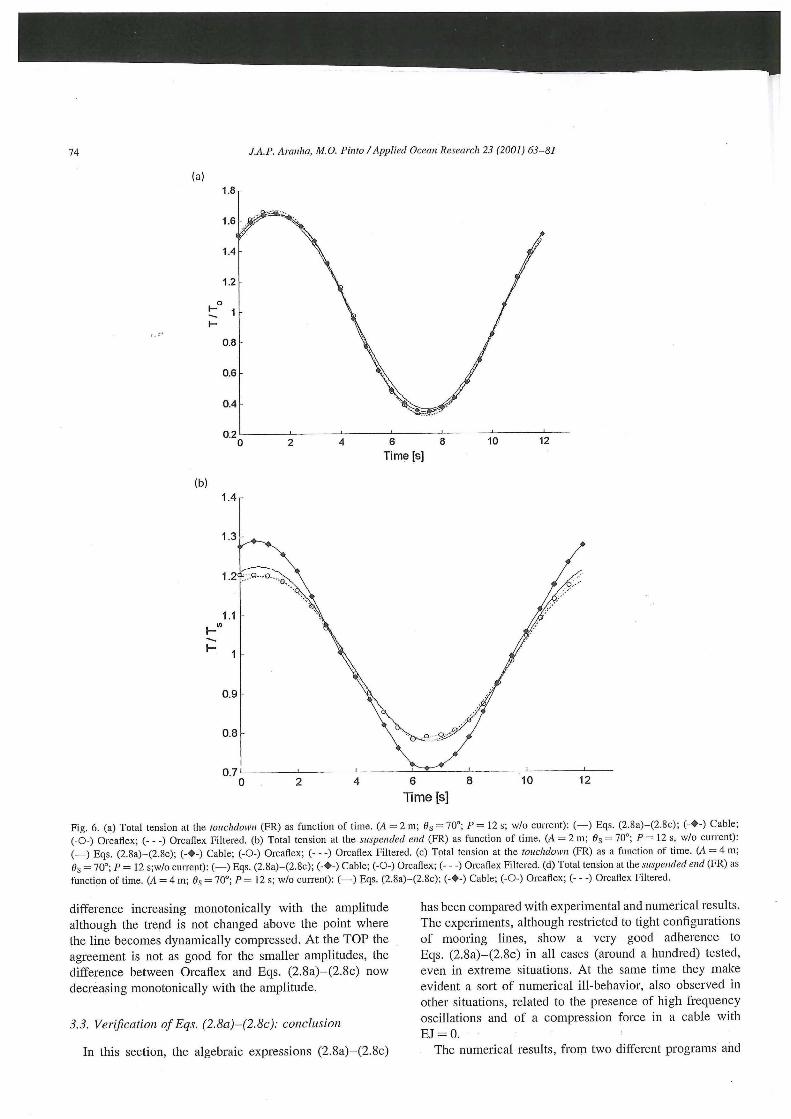
Fig. 6. (a) Total tension at the touchdown (FR) as function of time. (A = 2 m; ög = 70°; P = 12 s; w/o current): (—) Eqs. (2.8a)-(2.8c); ( - • - ) Cable;
(-0-) Orcaflex; (- - -) Orcaflex Filtered, (b) Total tension at tbe suspended end (FR) as function of time. (A = 2 m; 9s = 70°; P = 12 s, w/o current):
(—) Eqs. (2.8a)-(2.8c); ( - • - ) Cable; (-0-) Orcaflex; (- - -) Orcaflex Filtered, (c) Total tension at the touchdown (FR) as a function of time. (A = 4 m;
0g = 70°; P = 12 s;w/o cun'ent): (—) Eqs. (2.8a)-(2.8c); ( - • - ) Cable; (-0-) Orcaflex; (- - -) Orcaflex Filtered, (d) Total tension at the .suspended end (FR) as
function of time. (A = 4 m; 9s = 70°; P = 12 s; w/o cun-ent): (—) Eqs. (2.8a)-(2.8c); ( - • - ) Cable; (-0-) Orcaflex; (- - -) Orcaflex Filtered.
difference increasing monotonically wi th the amplitude
although the trend is not changed above the point where
the hne becomes dynamically compressed. A t the TOP the
agreement is not as good for the smaller amplitudes, the
difference between Orcaflex and Eqs. (2.8a)-(2.8c) now
decreasing monotonically wi th the amplitude.
3.3. Verification of Eqs. (2.8a)-(2.8c): conclusion
In this section, the algebraic expressions (2.8a)-(2.8c)
has been compared wi th experimental and numerical results.
The experiments, although restricted to tight configurations
of mooring lines, show a very good adherence to
Eqs. (2.8a)-(2.8c) i n al l cases (around a hundred) tested,
even in extreme situations. A t the same time they make
evident a sort o f numerical ill-behavior, also observed in
other situations, related to the presence of high frequency
oscillations and of a compression force in a cable w i t h
EJ = 0.
The numerical results, f r o m two different programs and
J.A.P. Aranha, M.O. Pinto/Applied Ocean Research 23 (2001) 63-81 75
(c)
Time [s]
Fig. 6. (continued)
for three cables (flexible riser, steel riser and heterogeneous
mooring line), i n distinct static configurations and under a
variety of dynamic excitation, show a general trend that can
be summarized as fol lows: fo r a small to m i l d amplitude o f
the imposed motion, where the dynamic tension is of the
order of the static tension at most, the numerical results
agree among themselves as wel l wi th Eqs. (2.8a)-(2.8c);
fo r the larger amplitudes, where then the dynamic tension
becomes greater than the static tension, the numerical
results diverge f r o m Eqs. (2.8a)-(2.8c) and equally airiong
theiuselves. Observing the close agreement between Eqs.
(2.8a)-(2.8c) and the experiments even in an extreme
condition, one would be tempted to rely more on Eqs.
(2.8a)-(2.8c) than on, the numerical solutions in these
extreme situations, although a more comprehensive experi
mental program would certainly be welcomed to conf i rm
this impression. The agreement at the suspended end is in
general worse than at the touchdown point, a d i f f icul ty also
observed when comparing the numericl results themselves.
I t is not clear why the numerical results show this tendency
at this point, a possible explanation is suggested f r o m the
derivation of Eqs. (2.8a)-(2.8c): the variation o f the
dynamic tension along the suspended length is, as elabo
rated in Section 4, a 'second order' con'ection and i t appears
more strongly when the dynamic tensions are small. I n this
situation a larger relative discrepancy seems to be more
l ike ly expected even for the numerical solutions.
The spurious high frequency oscillations as wel l the

76 J.A.P. Aranha, M.O. Pmto /Apphed Ocean Research 23 (2001) 63-81
0.5 0,55 0.6 0.65 0.7 0.75
Frequency (rad/s) 0,85
(b)
I '
30 40 50 60 70
Top Angle (deg) 80 90
Fig. 7. (a) Dynamic tension at the touchdown (SR) as a function of frequency (ös = 70°; w/o current): (—) Eqs. (2.8a)-(2.8c); ( - • - ) Cable; (-0-) Orcaflex.
(b) Dynamic tension at the touchdown (SR) as function of ös (P = 8 s; w/o cuirent): (—) Eqs. (2.8a)-(2.8c); (O) Orcaflex; ( • ) Cable (note: cable and Orcaflex
are coincident at A = 0.9 m).
compression above the crit ical value, both caused by the
discretization, tend to disappear as the mesh size
diminishes. No effort was inade i n the present work to
advance further in this direction, the focus being
concentrated more to cover a wide range of situations
rather than a specific case i n depth. Only one exaiuple
about the inflence of discretization was discussed here,
see Fig . 2c.
On the other hand, the algebraic approximation (2.8a)-
(2.8c) has to be looked wi th caution when the suspended
length is so large that the assumption w/we < 1 is not satis
fied. However, this situation is unlikely to occur in a real
problem unless the material is intrinsically soft, as in the
case of the 'synthetic cables' that are being used lately. The
algebraic expression has to be revised in this case but this is
beyond the scope of the present work.
4. Mathematical derivation of Eqs . (2.8a)-(2.8c)
As seen in the Introduction, the static configuration is
defined by the functions [6(sy,T(s)}, where 6(s) is the
angle between the tangent to the cable and the horizontal
plane and T{s) is the static tension. The dynamic variables
are given by
[Ciis, ty,v(s,ty,^{s,ty,fuis,t)],

J.A.P. Aranha, M.O. Pmto /Applied Ocean Research 23 (2001) 63-81 11
3 4 5
Amplitude [m]
Fig. 8. Dynamic tension at the suspended end (SR) as function of amplimde (ös = 70°; ƒ" = 12 s; w/o current): (—) Eqs. (2.8a)-(2,8c); (-0-) Orcaflex; ( - • - ) Cable.
respectively, the axial displacement, the transversal dis
placement, the dynamic variation o f the angle d{s) and the
dynamic tension. Assuming, as i t seems reasonable, that
the dynamic displacement is small compared to either the
2,5
2
1,5
1
0,5
0
TDP
- o - O R C A F L E X
For Analitica
—•—Cable
- o - O R C A F L E X
For Analitica
—•—Cable
- o - O R C A F L E X
For Analitica
—•—Cable
Amplitude (m)
TOP
10
4 6
Amplitude (m)
Fig. 9. Dynamic tension at the TOP and TDP as a function of amplitude. Heterogeneous Line. (Bs = 58,5°; P = 10 s; w/o cuirent): (—) Eqs, (2.8a)-(2.8c); (-0-) Orcafiex; ( - • - ) Cable. (Note: Cable and Orcaflex are coincidents at A = 2 m, TDP).
suspended length / or the static angle 6{s), the dynamic
equations can be derived ignoring the geometric non linear
i ty , wr i t ing them directly in tertns of the static geometric
configuration. The experimental results shown in Section
3.1 gives support to such assumption and, in this context,
the only source of non-linearity is the damping term.
However, this parcel w i l l be writ ten i n the 'linear' f o r m
dv
at (4.1a)
a proper definition for the nonlinear ^ w i l l be given later in
Section 4.2. Then, the dynamic variables should satisfy the
set o f linear equations (see R e f [2])
m-Ais,t) = —^is,t) - Tis)--is) <p(s,t), dt'
(m + ni^)
ds ds
dt' 3?' 2 {s,t) + Cco — {s,t)
= ^(s)Tr,{s,t)+ -ins)<p(s,t)), ds ds
f j , ( s , t ) du d(? -—-— = —is,t) - ~-{s)vis,t),
E A ds ds
dv do 0{s, t)= — (s, t)+ - - (syüis, t),
ds ds
subjected to the fo l lowing boundary conditions:
u{l,t)=UoA'"', i)(Z,0 = Vo-e'"',
/ ( ( - / ' , / ) = 0, 1-5(0,0 = 0.
(4.1b)
(4.1c)
In Eq. (4.1c) UQ and Vo are the amplitudes o f the imposed
motion at the suspended end, in the axial and normal
78 J.A.P. Aranha, M.O. Pmto/Applied Ocean Research 23 (2001) 63-81
directions respectively, and the boundary conditions at the
sea floor deserve some further comments. I n fact, although
the actual position of the instantaneous touchdown point is
of vi ta l importance i n the fatigue analysis of risers, see
Ref. [3] , i t can be shown, i n first approximation, that the
transversal displacement can be taken zero at the static
touchdown point, as impl ied by Eq. (4.1c); more is going
to be said about the touchdown displacement at the end o f
Section 4.3. Also, i f there is no f i ic t ion wi th the sea floor, tire
axial displacement would be zero at the anchor A
placed at i - = - A / ; i n the presence of a f r i c d o n the
static axial displacement is zero f o r s < —l', w i th l'
defined in Eq. (2.1b). One can say that the effective
anchor position i n the static problem is a.t s= -l' and
this position must be preserved in the geometrically
linear dynamic problem; this explains the boundary
condit ion fo r the axial displacement at the sea floor.
Expressing the linear harmonic solution of Eqs. (4 .1a) -
(4.1c) in the f o r m
{u(s, f ) ; v(s, ty, q>(s, t); fj,{s, t)} = {u{sy, visy, V(sy To(s)}-é'",
s (4.2a)
and introducing the non dimensional variables (see
Eqs. (2.7a) and (2.7b) fo r the definit ion of CTU, a and Te)
TD{S) eis) T{s)
E A
-, ^ AA . V ( 5 ) u(s)= , v{s)= ,
0 - u CTU
the dynamic equation reads (see also Eq. (2.6))
(4.2b)
i 7 T F j l ^ j " ^ ^ ^ = d ^ l d ? - d ? i
d0 / di; d0
( - l + t D . ^ ( ^ ) ^ ( . - )
_ E A f / d0
I + / ' d.- - ' ^ ^ + d^
(Av d0 \~W
r D ( 5 )
w i t h
i7(0 = a.
l + l'/dü de
I
idü _ d0 \
^ ds ds )' (4.2c)
17(0 = {VolUQ)a,
4.1. Asymptotic solution
I f the term proportional to the static deformation €{s) is
ignored in the axial equil ibrium equation one obtains, after a
further derivation wi th respect to s, that
( l ± i ' A _ ^A ^ _ A ^ \ \ I ) d f \ d s ds ) U e /
\ a ) J \ds ds / XM^J
ds
^de
ds'
and so
ds + r ' + 1'
OJ
We
2d0
l+l
,/ w ydo (sym-
I f now (üjfwe)' is disregarded when compared to 1 i n the
le f t hand side of the above equation'' then, w i th an e n w of
the f o r m [1 + 0{e; (M/CÜA)]^ one has
di-2 l + l ds {sym-
On the sea floor, where dis) = 0, the dynamic tension is
constant, see Eq. (4.2c), and so dr^ds = 0 for - / ' < . ? < 0;
i f the above equality is integrated f r o m s= -l' to s = I, the
fo l l owing expression is obtained fo r the derivative o f the
dynamic tension at the suspended end:
' de
l + l' •T?[^
ds (5 ) -v ( .v ) ds.
The variation of the dynamic tension along the suspended
length is weak, once i t is proportional to imltoA^, and it can
be assumed of the f o r m
TT,is) T D ( 0 ) + i ( l s i n a / 5 ) - [ T D ( l ) - T D ( 0 ) ] - 5 , (4.3a)
w i t h
[ r D ( 0 - T D ( 0 ) ] dB
(.y)-v(i) ds.
(4.3b)
Now consider the equilibrium Eq. (4.2c) in the transversal
direction, disregarding again the term proportional to eis).
The e i T o r i n this approximation w i l l be analyzed in Section
4.3 o f th i s section but one point should be observed here: the
higher order derivative in the transversal equation is lost in
this approximation and, w i th i t , the imposed boundary
conditions on vis); as i t is usual, this gives rise to a boundary
layer c o i T c c t i o n near the extremities, briefly elaborated i n
üi-1'll) = 0, i7(0) = 0. (4.2d)
The asymptotic solution o f Eqs. (4.2c) and (4.2d) w i h be
elaborated next.
^ Recall that the variation of along the suspended length has a relative
importance only when T D « 1; i f T D = 0(1) this variation is of secondary
importance since it is of order (co/coS' -C 1, see Eq. (4.3b).

J.A.P. Aranha, M.O. Pmto / AppUed Ocean Research 23 (2001) 63-81 79
Section 4.3. Ignoring Iiere these localized c o i T c c t i o n s one
has
( - 1 + 1
where the boundary conditions f o r the axial displace
ment u(s) have been used. W i t h an error o f the f o r m
[1 + 0 ( ( « / « e ) ' ) ]
T D ( 0 ) = 1 - V T . (4.4d)
EA / dgp TD(0) + i ( l + sin al 5 ) - (TD(1) - TD(0))-J .
The parcel ( T D ( 1 ) - T D ( 0 ) ) is o f order (w/we) < 1 and i t
becomes relevant only when the dynamic tension T D ( 0 ) is
also very small. As seen at the end of Section 2, this situa
tion occurs for a 'vertical cable' (0s ~ 'n'/2), where T D <C 1
since A ^ 1. However, in this case the term d6/ds(TD{l) —
TT)iO))'s/l in the above expression can be ignored by a
geometric argument: fo r a vertical cable the curvature d0/
d^ is appreciable only i n the vicini ty o f the touchdown point,
where then 5// <C 1. For a 'non vertical cable' the parameter
A decreases and the dynamic tension increases, turning
irrelevant the coirection proportional to ( T D ( 1 ) - T D ( 0 ) ) .
As a conclusion, one has, w i th the help of Eqs. (2.2a),
(2 .3C) and (2.7c), that the transversal equil ibrium equation
reduces to
( - 1 + i^nhis) = ^ i-Xl(s>TD(0). (4.4a)
Expression (4.4a) indicates that, i n first approximation,
the transversal displacement is proportional to the static
curvature and thus
ql h (4.4b)
W i t h Vj being the non dimensional amplitude of the
lateral displacement. Notice that Eq. (4.4b) must be
coirected at the small boundary layers near the extremities
but these corrections have a small integral contribution for
the overall equilibrium of the cable. Placing Eq. (4.4b) into
Eq. (4.4a) one obtains the algebraic relation
( - 1 + i ^ ^ ^ V x = T D ( 0 )
(4.4c)
A second relation can be obtained f r o m the integra
t ion o f the expression that defines TD{S) i n Eq. (4.2c); i n
fact, f r o m this expression and Eqs. (4.3a) and (4.3b) i t
fo l lows that
-I'll T D ( S ) d 5
d0 _ — {s)v{s) ds
0 ds
l + l' Vl'\
rv •1 d0
0 ds {s)v{s) ds
From Eq. (4.3b) i t also fol lows that
1 [ T D ( 1 ) - T D ( 0 ) ] =
and again the same argument can be used: the variation o f
the dynamic tension along the suspended length has a rela
tive importance only when T D ( 0 ) "C 1 and, in this case, one
has
1 T D ( 1 ) - r D ( 0 ) ] A7<A'-
Now, i f the damping factor ^ is given, the non dimen
sional amplitude Vr and the normalized dynamic tension at
the tuchdown point T D ( 0 ) can be determined f r o m the solu
tion o f the algebraic system Eqs. (4.4c) and (4.4d); the
dynamic tension T D ( 5 ) along the cable is
ruis) = r D ( 0 ) - aj—TrH — - , 0 < ^ < /. (4.5) I + i \ (Wg / /
A proper definit ion for the damping factor ^ w i l l be
elaborated next.
4.2. A model for the viscous damping
The viscous drag force in the dynamic problem is given
by the known expression
d,(s,t)=lpCuD V,(s) sinOis) dv
Tt ( s j )
X Vc(5) sin 0(5) TH - -pCuD\V,is) sine(^s)\V,is) sme(s), (4.6a)
Where V^s) is the projection o f the horizontal ocean current
on the cable's plane. On the other hand, the dissipative force
was assumed, in this section, in f o r m Eq. (4.1a) and the two
expressions can be related by imposing the equality o f the
dissipated power in one cycle, namely
I f ' / dv \ I f ' / - \ ^ { d , i s , t ) . - i s , t ) ) d s = - \ ^ { d : i s , t ) - ^ ( s , t ) ) j . .
<f(t)> 2 ^
•ZTTIOI
f( t )dt .
Placing Eq. (4.1a) i n the above integral, using Eqs. (4.2b)

80 J.A.P. Aranha, M.O. Pinto/Applied Ocean Research 23 (2001) 63-81
and (4.4b) and the definition (2.3a), the fo l lowing relation
can be derived
f ' / dv \
I f Vc(5) = 0 one obtains
(4.6b)
J o \ dt ds
and then
C=a\vACtj,
ql h
f o = 8 2 C D PTTD'IA TS h o^u
37r 7r m + ql Ö
(4.7a)
I n the other hand, f o r a strong current, when yj.sinö(s) >
dvldt, one has
/ 0 ~ ( 5 , f ) / c . ^ idy{s, I
and so
2 C D p7rD74 2V, 4
TT ;?! + /Ha wD I2 (4.7b)
For a moderated current the relative velocity in Eq. (4.6a)
becomes negative in part o f the cycle and the expression for
f is obviously more complicated; to preserve the simplicity,
the fo l l owing definition for the damping coefficient was
assumed in this work
(4.7c)
Nodce here that since, in general, one has
[Uo/D;2VJ(oD] > 1 therefore, in general, one must have
^ > 1: i n short, the viscous damping is super critical i n
the cable's dynamic. Placing now Eq. (4.7c) in to Eq.
(4.4c) and solving the system (4.4c) and (4.4d) one
obtains
\ I -n'
n'
showing that i n fact the cable/reezes ( I V x l — * 0 ) when
either u> or f/o (see expression f o r ^0) increases; using
this value fo r | V T I i n Eq. (4.7c) the foUowing expression
f o r the damping coefficient is obtained:
1
+ (4.8)
W i t h Eq. (4.8) the system (4.4c) and (4.4d) can be solved
and, after some algebra, the resuh (2.8a)-(2.8c) is obtained.
4.3. Quasi-static solution and boundary layers
As has already been seen, the error in the approximation
fo r the axial equation is o f the f o r m [1 + 0(e(s);(ft)/üJe)^)]
and the intension now is to assess the error i n the approx
imation for the transversal equation. When r^{s) s 0 (1 ) the
e i T o r is, indeed, of this same order of magnitude; however,
when < 1 one has, as seen at the end of Section 2, that
T-ois) = 0 ( i7^) and the error in this approximtion must be
reevaluated. I n this case the approximation used is correct i f
and only i f
or (see Eq. (2.3c))
I t fo l lows then that the proposed dynamic approximation
is vahd when < 1 i f and only i f the inequality
7 7 ^ - ( ^ ƒ » l ( o r ro s 0 { n ' ) » ^ ) (4.9a)
is satisfied simultaneously. In otherwords: when
— < 0 ( l / 7 r ) (4.9b)
the proposed approximation is not vahd anymore but the
response is quasi-static then.
This solution is elaborated in Ref. [2] and only the final
answer w i l be presented here; i n this way, i f 9{s) =
{qllTs)Xo{s) and the integrals
1 cl Jn= ^ -ds. n = 0,1,2,
0 Tis)/Ts
are defined, the quasi static solution is given by
ql Jl 11
(4.10a)
TQE
- ^ \ ö i l ) 0 - Ts Jo
1 + '2
(4.10b)

J.A.P. Aranha, M.O. Pinto /AppUed Ocean Research 23 (2001) 63-81 81
This result is consistent with Eq. (4.9a): since 72 - JI/JQ >
0, then T Q E = O ( I M ^ ) , showing that the dynamic result
(2.8a)-(2.8c) duninishes wi th ü ' until the level O ( I M ^ ) is
reached, when then one should switch to the quasi-static solu
tion. To make the analysis simpler the fol lowing rule was used
to plot the theoretical curve in Eig. la : i f T(2.8) > T Q E then the
value T D ( 0 ) = T(2.8) was taken; i f T(2.8) < T Q E then T D ( 0 ) = T Q E .
The experimental resuhs confirm the adequacy of such simple
strategy.
Einally, the question of the transversal boundary condi
tion (4.1C), lost i n the dynamic approximation (2.8a)-(2.8c),
w i l l be br ief ly addressed. To make more direct the
exposition more straightforward, the boundary layer in
the v icni ty o f the touchdown point w i l l be worked out
below. In this case the transversal Eq. (4.2c) is reduced
to {s s 0)
Tn d^v , / CO V E A / &e
(4.11a)
Introducing the parameter p by the expression
i - i f = / r T 7 - ^ " ' ' '
I (4.11b)
P = j | ( l + ^ W - f } e - * ' ^ b l » l ,
then Eq. (4.4b) is, i n the jargon of the boundary layer theory,
an outer solution o f Eq. (4.11a) wi th an error o f order 0 ( 1 /
p'), see R e f [4 ] ; obviously Eq. (4.4b) is a particular solu
tion of the linear Eq. (4.11a), the total solution, satisfying
the boundary condition v(0) = 0, being given by
v(^) = % raV^ix.is) - A f , ( 0 ) - e -n . (4.11c) ql h
The dynamic angular displacement at the static touch
down point is equal to
(4.12a)
and, as shown i n R e f [3] , i f the instantaneous touchdown
point is at 5 = X(t) one must have 0(X(O) + ^(O)'e''^' = 0.
Since (0(0) = O;d0/d5(O) = qlTo) then, i f Z ( 0 = Xo-e'"',
the amplitude XQ o f the horizontal displacement of the
touchdown point can be approximated by the expression
/ ql
_ a-i] To f Ts Y 1 r dxi ̂ (4.12b)
In the fatigue induced by the cyclic variation o f the curva
ture at the touchdown, the motion o f this point, and thus the
amplitude XQ, is of crucial importance. The cyclic variation
of the curvature, obtained in Ref. [3] , compares wel l wi th
some experiments, as discussed in Ref. [8] , and Eq. (4.12b)
makes possible to estimate this variation analytically.
A t the suspended end a similar analysis can be pursued
and the boundary condition v(/) = VQ can then be imposed.
Also, i n a heterogeneous cable the curvature is discontinu
ous when q(s) is and boundary layers occur at these discon
tinuity points. Again, these local corrections do not affect
the overall dynamics o f the cable and are of l i t t le practical
importance.
References
[1] Andrade BLR. Estudo experimental do comportamento dinamico de
linhas de amaiTa9ao, Tese de Mestrado, Departmento de Engenharia Naval e Oceanica, EPUSP, 1993.
[2] Aranha JAP, Pesce CP, Martins CA, Andrade BLR. Mechanics of
submerged cables: asymptotic solution for the dynamic tension.
Polar Engineers, ISOPE-93, Singapore, 6-11 June, 1993. [3] Aranha JAP, Martins CA, Pesce CP. Analytical approximation for the
dynamic bending moment at the touchdown point of a catenary riser.
Int J Offshore Polar Engng 1997;7(4):229-300. [4] Bender C, Orzag S. Advanced mathematical methods for Scientist and
Engineers. New York: McGraw-Hill, 1978. [5] Howell CT. Investigation of the Dynamics of Low Tension Cables.
PhD Thesis. Ocean Engineering Department, M I T , 1992. [6] Irvine H M , Caughey TK. The linear theory of the free vibration of a
suspended cable. Phil Trans R Soc Lond A 1974;341:229-315. [7] Larsen CM. Flexible riser analysis: comparison of results from compu
ter programs. Mar Struct 1992;5(5):103-19 (special issue on flexible
risers (Part 1)). [8] Pesce CP, Aranha JAP, Martins CA, Ricardo OGS, Silva S. Dynamic
curvature in catenary risers at the touchdown region: an experimental study and the analytical boundary layer solution. Int J Offshore Polar Engng 1998;8(4):303-10.
[9] Triantafyllou MS, Bliek A, Shin H. Dynamic analysis as a tool for open-sea mooring system design, presented at the Annual Meeting of the Society of Naval Architects and Marine Engineers, New York, 1985.
Related Documents