Dynamic Object Tracking in Wireless Sensor Networks Tzung-Shi Chen 1 , Wen-Hwa Liao 2 , Ming-De Huang 3 , and Hua-Wen Tsai 4 1 National University of Tainan, Dept. Information and Learning Technology 2 Tatung University, Dept. Information Management 3 Chang Jung Christian University, Dept. Information Management 4 National Cheng-Kung University, Dept. CSIE Wang, Sheng-Shih Wang, Sheng-Shih Dec. 26, 2005 Dec. 26, 2005 IEEE International Conference on Networks (ICON 2005)

Dynamic Object Tracking in Wireless Sensor Networks Tzung-Shi Chen 1, Wen-Hwa Liao 2, Ming-De Huang 3, and Hua-Wen Tsai 4 1 National University of Tainan,
Dec 14, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Dynamic Object Tracking in Wireless Sensor Networks
Tzung-Shi Chen1, Wen-Hwa Liao2, Ming-De Huang3, and Hua-Wen Tsai4
1 National University of Tainan, Dept. Information and Learning Technology2 Tatung University, Dept. Information Management
3 Chang Jung Christian University, Dept. Information Management4 National Cheng-Kung University, Dept. CSIE
Wang, Sheng-ShihWang, Sheng-ShihDec. 26, 2005Dec. 26, 2005
IEEE International Conference on Networks (ICON 2005)

Outline
• Introduction• Movement Object Tracking• Simulation• Conclusion

Introduction
• Motivations Target tracking is an important issue in WSNs
• Enemy vehicle tracking, habitat monitoring, etc Cooperation of multiple sensors
• Objectives Mobile object tracking
• Accurate• Quick• Energy efficiency

Movement Object Tracking --- Overview
A
F1
F3
F6
F7
F10
F2 F11
F12
F13
source
mobile target
ingress node
sensor

Movement Object Tracking --- Operation
• Target discovery• Mobile target detection• Target tracking• Track improvement
Face track adjustment Loop face track adjustment

Target Discovery
Target enters the network

Target Discovery (cont’d)
Three sensor nodes detect the target

Target Discovery (cont’d)
Where ?
Three sensor nodes build their corresponding faces

Target Discovery (cont’d)
querypacket
Source sends a query packet to discover the target

Target Discovery (cont’d)
replypacket
• state active• active time infinite
Ingress nodeThe sensor closest to the target replies the packet to the source

Target Discovery (cont’d)

Mobile Target Detection
wak
eup
Wakeup packet• ingress id (node A)• face hop count (1)
A
B
Node A is the 1st ingress node
wakeup
wakeup
wakeup

Mobile Target Detection (cont’d)
wak
eup
Wakeup packet• ingress id (node A)• face hop count (1)
A
B
Node A is the 1st ingress node
wakeup
wak
eup
wakeup

Mobile Target Detection (cont’d)
A
B
Target may enter face F0, F2, or F5
F2
F5
F0
F1

Mobile Target Detection (cont’d)
A
B
Node B sends the wakeup packets to all of its neighboring face nodes (F1, F2, F3, F4, and F5) Node A knows that node B is the next ingress node
F2
F3
F4
F1
F0
F5
Node B is the 2nd ingress node

Mobile Target Detection (cont’d)
A
BF2
F3
F4
F1
active time expires go to sleep
F0
F5

Target Tracking
A
B
C
D
• Node A knows the next ingress node (node B)• Node B knows the next ingress node (node C)• Node C knows the next ingress node (node D)
• Source knows the 1st ingress node (node A)

Face Track Adjustment
A

Face Track Adjustment (cont’d)
AG
B
C
D
E
F
• Track : <A, B, C, D, E, F> (F1, F2, F3, F6, F7, F8, F9)• Face hop count = 7
Not optimaltrack
F1
F2
F3
F4
F5
F6
F7
F8
F9
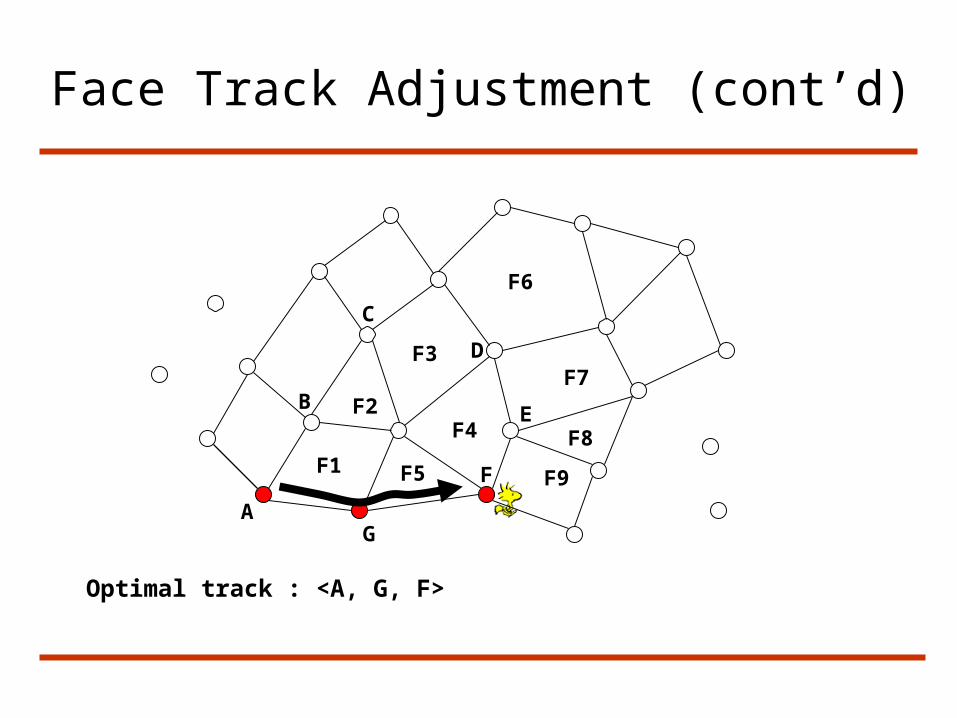
Face Track Adjustment (cont’d)
AG
B
C
Optimal track : <A, G, F>
F1
F3
F4
F5
F6
F7
F8
F9F
D
EF2

Face Track Adjustment (cont’d)
AG
B
C
F1
F3
F4
F5
F6
F7
F8
F9
if (face hop count = k)then send infoadj packet to the last checkface (node A)
F
D
EF2

Face Track Adjustment (cont’d)
AG
B
C
F1
F3
F4
F5
F6
F7
F8
F9F
D
EF2

Face Track Adjustment (cont’d)
AG
B
C
F1
F3
F4
F5
F6
F7
F8
F9F
D
E
The ingress nodes, B, C, D, and E, are canceled
F2

Face Track Adjustment (cont’d)
AG
B
C
Node A finds the next ingress node closest to the kth ingress node (F),and then sends an adjustment packet to the next ingress node
F1
F3
F4
F5
F6
F7
F8
F9F
D
E
adjustment adjustment
F2

Loop Face Track Adjustment
AG
B
C
F1
F3
F4
F5
F6
F7
F8
F9
D
EF2
F
H

Loop Face Track Adjustment (cont’d)
AG
B
C
F1
F3
F4
F5
F6
F7
F8
F9
D
EF2
• Track : <A, B, C, D, E, F, H> (F1, F2, F3, F6, F7, F8, F9, F4, F3)
F
H
loop

Loop Face Track Adjustment (cont’d)
A
H
B
C
F1
F3
F4
F5
F6
F7
F8
F9
F
D
EF2
• Node C receives the wakeup packet from node H and detects the loop, node C sends a deletion packet to node H
deletionG

Loop Face Track Adjustment (cont’d)
AG
B
C
F1
F3
F4
F5
F6
F7
F8
F9
D
EF2
F
H

Simulation Model
• ns-2 simulator• Sensing field: 500 m 500 m• 1000 sensor nodes (random deployment)• Communication range = sensing range = 25
m• Power
Tx = Rx = 175 mW Initial: 5 joule
• Moving speed Target: 20 m/s Source: 10 m/s, 20 m/s, or 30 m/s
• Simulation time: 2000 secs
Simulation --- Comparison
• Threshold Flooding (TF) When the source reaches the location of the
target, target discovery process is executed again• Schedule Flooding (SF)
The source executes the target discovery process every 2 secs
• Schedule Updating (SU) The source queries once The sensor which detects the target sends the
update message to the source every 2 secs• Proposed Object Tracking scheme (OT)

Simulation Result --- First Catching Time
infrequent query flooding and face track adjustment

Simulation Result --- Energy Consumption
• before the first catch • after the first catch
flooding-based
less query flooding

Simulation Result --- Lifetime
query packet is required although the source is near the target

Conclusion
• Target tracking protocol Dynamic Energy efficiency Shorter tracking path Loop avoidance
Related Documents











