Dynamic modeling of cable towed body using nodal position finite element method F.J. Sun a , Z.H. Zhu a,n , M. LaRosa b a Department of Earth and Space Science and Engineering, York University, 4700 Keele Street, Toronto, Ontario, Canada M3J 1P3 b Curtiss-Wright Flow Control Company, Indal Technologies, 3570 Hawkestone Road, Mississauga, Ontario, Canada L5C 2V8 article info Article history: Received 1 July 2010 Accepted 13 November 2010 Editor-in-Chief: A.I. Incecik Available online 9 December 2010 Keywords: Nodal position finite element method Dynamics Cable Towed body Modeling abstract This paper analyses nonlinear dynamics of cable towed body system. The cable has been modeled and analyzed using a new nodal position finite element method, which calculates the position of the cable directly instead of the displacement by the existing finite element method. The newly derived nodal position finite element method eliminates the need of decoupling the rigid body motion from the total motion, where numerical errors arise in the existing nonlinear finite element method, and the limitation of small rotation in each time step in the existing nonlinear finite element method. The towed body is modeled as a rigid body with six degrees of freedom while the tow ship motion is treated as a moving boundary to the system. A special procedure has been developed to couple the cable element with the towed body. The current approach can be used as design tool for achieving improved directional stability, maneuverability, safety and control characteristics with the cable towed body. The analysis results show the elegance and robustness of the proposed approach by comparing with the sea trial data. & 2010 Elsevier Ltd. All rights reserved. 1. Introduction The submerged cable towed body has a wide range of applica- tions in science, industry and defense. Due to the extreme complex- ity of the system, the stability, maneuverability, safety and control characteristics of a specific cable towed body usually cannot be fully evaluated until it has been constructed and actually in operation (Duvat and Large, 1997). To reduce the high risk associated with design of cable towed body system, computer simulation of the cable towed body has been widely used (Zhu and Morrow, 1998). In these analyses, the towed body is modeled as a rigid body with six degrees of freedom (DOF) and the hydrody- namic loads acting on the body are represented by a set of dimensionless hydrodynamic coefficients that can be determined experimentally by towing the towed body in water tank with specified motions. The ship motion is assumed independent to the tow cable and the towed body because the ship’s mass is several orders of magnitude higher than the cable and towed body. It is treated as a moving boundary condition of the cable towed body system. The ship connects to the towed body by a cable, which is usually simplified as a flexible tension member and its bending stiffness is neglected because of the extremely large ratio of length over cross-section dimension (Zhu et al., 2003). The motion of the cable involves large rigid body rotation and displacement coupled with small elastic stretch. In practice, the engineers and designers are interested in the current position not the displacement of cable. This leads to the existing analyses of the cable dynamics are mostly done by finite difference method (FDM) that approximates the governing equations of cable by difference equations along the cable with its position as state variable (Koh et al., 1999; Burgess, 1999; Koh and Rong, 2004), although finite element method (FEM) is used in some cases (Webster, 1995). For instance, Ablow and Schechter (1983) developed a fully three-dimensional code to compute the motion of a towed cable based on a robust and stable finite difference approximation. Huang (1994) modeled the cable based upon the lump-mass-and-spring model and the finite difference method. Actually, the lump-mass-and-spring method is a special case of finite element method using 2-noded straight bar element. However, the FDM is problem specific, which is hard to be implemented in general-purpose analysis programs in an algorithm fashion. The FEM discretizes the continuous cable into a finite number of elements. Each element may have different geometrical and material properties but the governing mathematic equations for each element are the same. By assembling all the elements together, the complex geometries with multiple cable branches or different cable properties along the length can be easily modeled algorithmically (Zhu et al., 2003). Although the FEM has been used virtually in all areas of engineering, it is not widely adopted in the analysis of cable dynamics because the existing FEM calculates the relative displacement not the position of the cable. Instead, the cable’s current position has to be obtained by adding the relative displacement to its previous position. In addition, the existing FEM also requires decoupling the large rigid body displacement and Contents lists available at ScienceDirect journal homepage: www.elsevier.com/locate/oceaneng Ocean Engineering 0029-8018/$ - see front matter & 2010 Elsevier Ltd. All rights reserved. doi:10.1016/j.oceaneng.2010.11.016 n Corresponding author. Tel.: + 1 416 736 2100x77729; fax: + 1 416 736 5817. E-mail address: [email protected] (Z.H. Zhu). Ocean Engineering 38 (2011) 529–540

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Ocean Engineering 38 (2011) 529–540
Contents lists available at ScienceDirect
Ocean Engineering
0029-80
doi:10.1
n Corr
E-m
journal homepage: www.elsevier.com/locate/oceaneng
Dynamic modeling of cable towed body using nodal position finiteelement method
F.J. Sun a, Z.H. Zhu a,n, M. LaRosa b
a Department of Earth and Space Science and Engineering, York University, 4700 Keele Street, Toronto, Ontario, Canada M3J 1P3b Curtiss-Wright Flow Control Company, Indal Technologies, 3570 Hawkestone Road, Mississauga, Ontario, Canada L5C 2V8
a r t i c l e i n f o
Article history:
Received 1 July 2010
Accepted 13 November 2010
Editor-in-Chief: A.I. Incecikdirectly instead of the displacement by the existing finite element method. The newly derived nodal
position finite element method eliminates the need of decoupling the rigid body motion from the total
Available online 9 December 2010Keywords:
Nodal position finite element method
Dynamics
Cable
Towed body
Modeling
18/$ - see front matter & 2010 Elsevier Ltd. A
016/j.oceaneng.2010.11.016
esponding author. Tel.: +1 416 736 2100x777
ail address: [email protected] (Z.H. Zhu).
a b s t r a c t
This paper analyses nonlinear dynamics of cable towed body system. The cable has been modeled and
analyzed using a new nodal position finite element method, which calculates the position of the cable
motion, where numerical errors arise in the existing nonlinear finite element method, and the limitation
of small rotation in each time step in the existing nonlinear finite element method. The towed body is
modeled as a rigid body with six degrees of freedom while the tow ship motion is treated as a moving
boundary to the system. A special procedure has been developed to couple the cable element with the
towed body. The current approach can be used as design tool for achieving improved directional stability,
maneuverability, safety and control characteristics with the cable towed body. The analysis results show
the elegance and robustness of the proposed approach by comparing with the sea trial data.
& 2010 Elsevier Ltd. All rights reserved.
1. Introduction
The submerged cable towed body has a wide range of applica-tions in science, industry and defense. Due to the extreme complex-ity of the system, the stability, maneuverability, safety and controlcharacteristics of a specific cable towed body usually cannot befully evaluated until it has been constructed and actually inoperation (Duvat and Large, 1997). To reduce the high riskassociated with design of cable towed body system, computersimulation of the cable towed body has been widely used (Zhu andMorrow, 1998). In these analyses, the towed body is modeled as arigid body with six degrees of freedom (DOF) and the hydrody-namic loads acting on the body are represented by a set ofdimensionless hydrodynamic coefficients that can be determinedexperimentally by towing the towed body in water tank withspecified motions. The ship motion is assumed independent to thetow cable and the towed body because the ship’s mass is severalorders of magnitude higher than the cable and towed body. It istreated as a moving boundary condition of the cable towed bodysystem. The ship connects to the towed body by a cable, which isusually simplified as a flexible tension member and its bendingstiffness is neglected because of the extremely large ratio of lengthover cross-section dimension (Zhu et al., 2003). The motion of thecable involves large rigid body rotation and displacement coupledwith small elastic stretch. In practice, the engineers and designers
ll rights reserved.
29; fax: +1 416 736 5817.
are interested in the current position not the displacement of cable.This leads to the existing analyses of the cable dynamics are mostlydone by finite difference method (FDM) that approximates thegoverning equations of cable by difference equations along thecable with its position as state variable (Koh et al., 1999; Burgess,1999; Koh and Rong, 2004), although finite element method (FEM)is used in some cases (Webster, 1995). For instance, Ablow andSchechter (1983) developed a fully three-dimensional code tocompute the motion of a towed cable based on a robust and stablefinite difference approximation. Huang (1994) modeled the cablebased upon the lump-mass-and-spring model and the finitedifference method. Actually, the lump-mass-and-spring methodis a special case of finite element method using 2-noded straightbar element. However, the FDM is problem specific, which is hardto be implemented in general-purpose analysis programs in analgorithm fashion.
The FEM discretizes the continuous cable into a finite number ofelements. Each element may have different geometrical andmaterial properties but the governing mathematic equations foreach element are the same. By assembling all the elementstogether, the complex geometries with multiple cable branchesor different cable properties along the length can be easily modeledalgorithmically (Zhu et al., 2003). Although the FEM has been usedvirtually in all areas of engineering, it is not widely adopted in theanalysis of cable dynamics because the existing FEM calculatesthe relative displacement not the position of the cable. Instead, thecable’s current position has to be obtained by adding the relativedisplacement to its previous position. In addition, the existing FEMalso requires decoupling the large rigid body displacement and

F.J. Sun et al. / Ocean Engineering 38 (2011) 529–540530
rotation from the small elastic stretch. This process is inconvenientfor the engineers and designers in the field and is prone to theaccumulated numerical errors arising from each time step over along period time. For instance, the large rigid body rotation of thecable leads to geometrical nonlinearity, improper approximation incalculating the strain energy of element based on displacementapproach will result in numerical errors that do not exist in FDM,where the strain is calculated by comparing the current config-uration with original configuration directly. For instance, let usconsider a 2-noded straight cable/bar element experiencing a rigidbody rotation and translation as shown in Fig. 1. The rigid bodydisplacements of any point along the element can be expressed as
u¼ u1þxðcosy�1Þ, v¼ v1þxsiny ð1Þ
Accordingly, the Green–Lagrangian strain of the element iscalculated by
e¼ eLþeN ¼@u
@xþ
1
2
@u
@x
� �2
þ@v
@x
� �2" #
ð2Þ
where
eL ¼@u
@x¼ cosy�1 and eN ¼
1
2
@u
@x
� �2
þ@v
@x
� �2" #
¼1
2ðcosy�1Þ2þsin2yh i
The strain energy of the element is then calculated as
U ¼1
2
Z L
0EAe2ds¼
1
2
Z L
0EAðe2
Lþ2eLeNþe2NÞds¼ 0
The higher order term e2N in the strain energy is commonly
ignored in the existing FEM if one assumes small strain andmoderate rotation, such that
U ¼1
2
Z L
0EAe2ds¼
1
2
Z L
0EAðe2
L þ2eLeNþe2NÞds�
1
2
Z L
0EAðe2
Lþ2eLeNÞds
ð3Þ
From Eq. (3), one can derive the linear stiffness matrix from thefirst term e2
L and the geometric nonlinear stiffness matrix from thesecond term eLeN.
Now let us substitute the rigid body displacement in Eq. (1) intothe approximated strain energy expression in Eq. (3). It shows thestrain energy is not zero as it should be, such that
U �1
2
Z L
0EAðe2
Lþ2eLeNÞds¼�1
2EALðcosy�1Þ2 ð4Þ
Eq. (4) indicates that the existing FE approximation will result inspurious strain energy in dealing with rigid body rotation. Thespurious energy will approach zero only if we assume the rigidbody rotation is small, such that:
cosy� 1
Then, the strain energy in Eq. (4) becomes zero approximately.Thus, it is clear that the FE approximation is valid only for the smallrotation or small increment when the large rigid body rotation isanalyzed by an incremental solution. This tiny approximation error
x
P
θ
v
v
u2v1
u1
P0 u
v
1
L
2Undeformed
v1 P0 u
L
Fig. 1. Schematic of a 2-noded straight cable element experiencing rigid body
motion.
accumulates at each time step and may lead to spurious results dueto violation of energy conservation of the FE model (Simo et al.,1992) over a long period. Many efforts have been devoted to thisproblem in the literature, e.g., the symplectic numerical integratorto ensure the energy conservation of the discretized system (Simoet al., 1992; Tuwankotta and Quispel, 2003). These methods areusually complicated in mathematics. Different to the efforts thatenhances the existing displacement based FEM, some efforts havebeen devoted to develop an alternative finite element procedure tosolve the positions of a system directly after realizing that thepositions are the main interest for certain applications. Forinstance, Shabana (1998) developed an absolute nodal coordinatefinite element method to solve the positions and the slopes of abeam directly.
The current study is motivated by the need of an alternativerobust FEM to the existing FDM/FEM for the dynamic analysis ofcable experiencing large rigid body rotations coupled with smallelastic deformation over a long period. A new FEM has beendeveloped to solve the position of cable directly by re-formulatingthe existing FEM in terms of nodal position instead of nodaldisplacement. Thus, the new nodal position finite element method(NPFEM) will eliminate (i) the need to decouple the rigid bodyrotation and the elastic deformation of element involving largerigid body rotation and (ii) the accumulation errors arising from thenumerical solution process at each time step.
The new NPFEM has been implemented into a simulationprogram together with the rigid body dynamics of the towed bodyand the ship motion as moving boundary condition. The simulationprogram has been developed for the purpose of aiding engineers,designers and operators to achieve improved directional stability,maneuverability, safety and control characteristics of the cabletowed body system. The analysis results demonstrate the eleganceand robustness of the new approach and the credibility of thesimulation program is verified by the sea trial data.
2. Formulation of nodal position finite element method
Most problems of dynamics can be recast in a framework ofgeneralized energetic principles. We will derive the governingequations of nodal position finite element method using theprinciple of virtual work. Consider a two-noded straight cableelement in a three-dimensional space. The element geometry isdescribed by its nodal coordinates (Xi, Yi, Zi) (i¼1, 2) in a globalcoordinate system OXYZ and (xi, yi, zi) (i¼1, 2) in a local coordinatesx, y and z where x-axis is defined along the cable, y- and z-axes areperpendicular to the x-axis, respectively.
Assume the position, velocity and acceleration of an arbitrarypoint along the cable element are expressed in terms of elementshape functions and the corresponding nodal values, such that
R¼NXe, v¼ _R ¼N _X e, a¼ €R ¼N €X e ð5Þ
N ¼
1�z 0 0 z 0 0
0 1�z 0 0 z 0
0 0 1�z 0 0 z
264
375
z¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðX�X1Þ
2þðY�Y1Þ
2þðZ�Z1Þ
2qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðX2�X1Þ
2þðY2�Y1Þ
2þðZ2�Z1Þ
2q
where R¼{X, Y, Z}T, v¼{vx, vy, vz}T and a¼{ax, ay, az}
T are theposition, velocity and acceleration vectors of the arbitrary point inthe global coordinate system, respectively, Xe¼{X1, Y1, Z1, X2, Y2,Z2}T is the global nodal coordinates at the current time, N is theelement shape function matrix and the dot denotes the timederivations, respectively.

F.J. Sun et al. / Ocean Engineering 38 (2011) 529–540 531
The elastic strain of the element is calculated with respect to theundeformed element length L0, such as
ex ¼L
L0�1¼
L2
L0L�1
¼X2�X1
L0cosyxþ
Y2�Y1
L0cosyyþ
Z2�Z1
L0cosyz�1¼ B0QXe�1
ð6Þ
cosyx ¼X2�X1
Lcosyy ¼
Y2�Y1
Lcosyz ¼
Z2�Z1
Lð7Þ
B0 ¼ �1L , 0, 0, 1
L , 0, 0h i
Q ¼
cosyx cosyy cosyz 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 cosyx cosyy cosyz
0 0 0 0 0 0
0 0 0 0 0 0
2666666664
3777777775
where L¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðX2�X1Þ
2þðY2�Y1Þ
2þðZ2�Z1Þ
2q
is the length of the
deformed element.It should be noted that the strain matrix B0 is the same as the
existing two-noded cable/bar element and Q is the coordinatetransformation matrix from local to global coordinates.
Based on Eq. (6), the strain energy of element can be expressedas
U ¼1
2
Z L
0EAe2
x ds¼1
2XT
e KXe�XTe Fkþ
1
2EAL ð8Þ
where E is Young’s modulus of the cable, A is the cross sectionarea of the cable, K is the stiffness matrix of element in the globalcoordinate system and Fk is the equivalent nodal force vectorresulting from the elasticity of the cable, such as
K ¼ EALðB0Q ÞT B0Q ¼Q T K0Q ð9Þ
K0 ¼EAL
L20
1 0 0 �1 0 0
0 0 0 0 0 0
0 0 0 0 0 0
�1 0 0 1 0 0
0 0 0 0 0 0
0 0 0 0 0 0
2666666664
3777777775
Fk ¼ EALQ T BT0
It should be noted that the stiffness matrix is similar to thestiffness of the existing two-node straight cable/bar elementsexcept the scaling factor L/L0. For the small strain deformation,L/L0¼1+exE1. Then, the stiffness matrix K0 is the same as theexisting two-node straight cable/bar elements. However, theNPFEM has an extra equivalent nodal elastic force vector Fk thatdoes not exist in the existing FEM. This is not the external load. Itresults from transforming the state variables from nodal displace-ment to nodal position and is the function of element rigidity EA
and orientation only. The K and Fk are highly nonlinear and time-dependent as the coordinate transformation matrix Q is thefunction of the orientation of cable element that varies in time.
Moreover, there is no geometric (or initial stress) stiffnessmatrix commonly existing in the displacement based finite ele-ment method in Eq. (9). The geometric stiffness matrix is due to therigid body rotation when using the nodal displacement to calculatethe strain energy of element. As indicated in the introductionsection, it is the source of accumulation error in case of large rigidbody rotation. The current approach calculates the strain energydirectly by comparing the new element length to its undeformedone using the nodal position. Thus, it eliminates the source of
accumulation error due to large rigid body rotation and, therefore,there is no geometric stiffness matrix in NPFEM formulation.
The kinetic energy of the element can be calculated straightfor-ward, such that
T ¼1
2
Z L
0rz _RT
U _Rdx¼1
2_X T
e M _X e ð10Þ
M ¼rAL
6
2 0 0 1 0 0
0 2 0 0 1 0
0 0 2 0 0 1
1 0 0 2 0 0
0 1 0 0 2 0
0 0 1 0 0 2
2666666664
3777777775
ð11Þ
where M is the mass matrix of the cable element in the globalcoordinate system and r is the material density of the cable. Itshould be noted that the element mass matrix is constant in theglobal coordinate system if LEL0 and is the same as the consistentmass matrix of cable element in the existing FEM.
Once the strain and kinetic energy of element has beencalculated, we need to determine the work done by the externalforces acting on the element. The cable moves in a fluid willexperience the drag and the inertial force due to the added mass offluid (Zhu and Meguid, 2006), such that
f dn ¼�CdnðaÞr0D
2V2 Vn
9Vn9f dt ¼�CdtðaÞ
r0D
2V2 Vt
9Vt9ð12aÞ
f a ¼�Cmr0A _V n ð12bÞ
V ¼ _r�Vc Vt ¼ ðt0UVÞt0 Vn ¼V�Vt ð12cÞ
where fdn and fdt are the drag force components normal and tangentto the cable, respectively, Cdn(a) and Cdt(a) are the normal andtangent drag coefficients, respectively, a is the angle of attack, r0 isthe fluid density, D is the cable diameter, fa is the inertial forcenormal to the cable resulting from the added mass of fluidsurrounding the cable, Cm is the added mass coefficient of thecable, Vc is the free stream velocity of the fluid and t0 is the unitvector along the axis of element.
The inertial force of the added mass is a distributed load actingon the element and the virtual work done by the inertial force isgiven by
dWa ¼�
Z L
0f T
aUdRdx¼ dXTe Ma
€X e�dXTe Fa ð13Þ
Ma ¼Cmr0AL
6ðMa0�Ma1Þ Fa ¼Ma
_V ec ð14aÞ
Ma0 ¼2I3�3 I3�3
I3�3 2I3�3
" #Ma1 ¼
2m0 m0
m0 2m0
" #ð14bÞ
m0 ¼
cos2yx cosyxcosyy cosyxcosyz
cosyxcosyy cos2yy cosyycosyz
cosyxcosyz cosyzcosyy cos2yz
264
375 ð14cÞ
where Ma is the added mass matrix resulting from the fluidsurrounding the cable, Fa is the inertial force due to the addedmass of the fluid, I3�3 is the unity matrix of 3 by 3 and
_V ec ¼
_Ve
cx1, _Ve
cy1, _Ve
cz1, _Ve
cx2, _Ve
cy2, _Ve
cz2
� �Tis the fluid accel-
eration vector at the element nodes, respectively. It should be notedthat both the added mass matrix and the inertial force vector arehighly nonlinear and time-dependent as the orientation of elementvaries in time. All the quantities are defined in the global coordinatesystem.

F.J. Sun et al. / Ocean Engineering 38 (2011) 529–540532
Similarly, the drag force is a distributed load acting on theelement and the virtual work done by the drag force in the localelement coordinate is
dWd ¼�
Z L
0f T
dUdrdx¼�dxTe f e
d ð15Þ
where f ed is the equivalent nodal drag force vector in the local
coordinates, such that
f ed ¼
�CdtðaÞr0D
2 signðvxÞf1
�CdnðaÞr0D
2 signðvyÞf1
0
�CdtðaÞr0D
2 signðvxÞf2
�CdnðaÞr0D
2 signðvyÞf2
0
8>>>>>>>>>><>>>>>>>>>>:
9>>>>>>>>>>=>>>>>>>>>>;
fi ¼ _xTe UAiU _xe�2 _xT
e UAiUveþvTe UAiUveði¼ 1, 2Þ
Fn−−1
FF
F τ nn+1
n−1
oCBCG
ox
y
X FO X F
z
Y
Z
Fig. 2. Schematic of loads and coordinate systems of towed body.
TG2F ¼
cosyycosyz cosyysinyz �sinyy
�cosyxsinyzþsinyxsinyycosyz cosyxcosyzþsinyxsinyysinyz sinyxcosyy
sinyxsinyzþcosyxsinyycosyz �sinyxcosyzþcosyxsinyysinyz cosyxcosyy
264
375
A1 ¼1
12
3 0 0 1 0 0
0 3 0 0 1 0
0 0 3 0 0 1
1 0 0 1 0 0
0 1 0 0 1 0
0 0 1 0 0 1
2666666664
3777777775
A2 ¼1
12
1 0 0 1 0 0
0 1 0 0 1 0
0 0 1 0 0 1
1 0 0 3 0 0
0 1 0 0 3 0
0 0 1 0 0 3
2666666664
3777777775
Note that the drag force vector is a nonlinear function of the
unknown nodal velocity _xeof element. The drag force vector f ed
needs to be transformed to the global coordinate system using thestandard FEM coordinate transformation matrix T, such that
dWd ¼�dxTe f e
d ¼�dXTe Fd f e
d ¼ TFd ð16Þ
Finally, the buoyancy and gravity forces acting on the elementare defined in the global coordinates with the assumption that theglobal Z-axis is positive downwards. Accordingly, the virtual workdone by the buoyancy and gravity forces is
dWbg ¼�
Z L
0eAgf0,0,r�r0gUdRdx¼�dXT
e Fbg ð17Þ
where g is the gravity acceleration and Fbg is the equivalent nodalbuoyant and gravity force vector, such that
Fbg ¼LAðr�r0Þg
2f0,0,1,0,0,1gT ð18Þ
Now, we can derive the equation of motion of the element usingthe principle of virtual work, such that
dðU�TÞþdWaþdWdþdWbg ¼ 0 ð19Þ
Substituting Eqs. (8), (10), (13), (16) and (17) into Eq. (19)leads to
dXTe Uð½MþMa�
€X eþKXe�Fk�Fa�Fd�FbgÞ ¼ 0
For an arbitrary virtual displacement dXTe , there must exist
½MþMa�€X eþKXe ¼ FkþFaþFdþFbg ð20Þ
Since there is damping in any structural system, we introduce adamping matrix into the equation of motion in Eq. (20)
½MþMa�€X eþC _X eþKXe ¼ FkþFaþFdþFbg ð21Þ
The damping matrix C is calculated using Rayleigh dampingmodel, such that
C ¼ b½MþMa�þgK ð22Þ
where b and g are the Rayleigh damping coefficients, respectively.The equation of motion in Eq. (22) is highly nonlinear because
the matrices of added mass, damping, and stiffness on the left handside and the force vectors of on the right hand side are the functionsof the current position Xe and velocity _X e, respectively.
3. Dynamics of towed body
The towed body is modeled as a rigid body with six degrees offreedom. The position of its centre of gravity (CG) are described by(Xb, Yb, Zb) in the global coordinate system and its orientation byEuler angles (yx—roll, yy—pitch, yz—yaw) in a body fixed localcoordinate system (x, y, z) with the origin at the body’s CG as shownin Fig. 2. The transformation order from the global to the localcoordinate systems is defined as yaw, pitch, roll and the corre-sponding transformation matrix is derived as
Once the coordinate systems have been defined, the equation oftranslational motion of the towed body can be expressed in theglobal coordinate system while the equation of rotational motioncan be expressed in the local coordinate system, respectively
Mb€X b ¼ FhþFcþFgþFb ð23Þ
~I _xþx� H ¼ shþscþsb ð24Þ
where
Mb ¼
m 0 0
0 m 0
0 0 m
264
375 ~I ¼
Ixx �Ixy �Ixz
�Ixy Iyy �Iyz
�Ixz �Iyz Izz
264
375
H ¼
Ixx �Ixy �Ixz
�Ixy Iyy �Iyz
�Ixz �Iyz Izz
264
375
ox
oy
oz
8><>:
9>=>;
m is the inertia mass of the towed body, (Ixx, Iyy, Izz, Ixy, Iyz, Izx) are thecomponents of moment of inertia of the towed body about its CG inthe local coordinate system, x¼(ox,oy,oz)
T is the angular velocityvector of the towed body in the local coordinate system, (Fh, Fc, Fg,Fb) are the hydrodynamic force, cable tension, gravity and buoy-ancy acting on the towed body, (sh, sc, sb) are the induced momentsby the hydrodynamic, cable tension and buoyancy, and the dot

Fig. 3. Configuration of a towed bared and faired cable.
Table 1Parameters of tow cable.
Cable type Diameter (m) Density (kg/m) Length (m) Drag D0 Added mass Cm Elasticity EA (kN)
Bare 0.0411 5.20 335 1.80 1.02.625�104
Fairing 0.0800 8.32 125 0.15 0.25
Table 2Parameters of towed body.
Property Value
Dry mass 3250 kg
Volume 6.25 m3
Length 3.81 m
Centre of mass Fore/aft (X) 0.00 m
Athwartship (Y) 0.00 m
Vertical (Z) 0.00 m
Centre of buoyancy Fore/aft (X) �0.11 m
Athwartship (Y) 0.00 m
Vertical (Z) 0.01 m
Tow point Fore/aft (X) 0.25 m
Athwartship (Y) 0.00 m
Vertical (Z) �1.468 m
Inertia tensors (IxyE IyzE IzxE0) Ixx 3804 kg m2
Iyy 10,363 kg m2
Izz 8375 kg m2
4000
3500
3000End
2500
2000
1500
ters
)(m
etiti
onPo
si
1000
500
0Start
-2000 -1500 -1000 -500 0 200015001000500
Position (meters)
Fig. 4. Horizontal trajectories of ship and towed body.
F.J. Sun et al. / Ocean Engineering 38 (2011) 529–540 533
above the variables denotes the time derivative, respectively. Thehydrodynamic forces and moments can be calculated using hydro-dynamic load coefficients (Sun, 2010).
Considering the relationship between the angular velocity andthe Euler angles
x¼
ox
oy
oz
8><>:
9>=>;¼
1 0 �sinyy
0 cosyx sinyxcosyy
0 �sinyx cosyxcosyy
264
375
_yx
_yy
_yz
8>><>>:
9>>=>>;¼ A _h ð25Þ
where
A¼
1 0 �sinyy
0 cosyx sinyxcosyy
0 �sinyx cosyxcosyy
264
375
we can express the angular acceleration in terms of the Eulerangles, such that
_x ¼A €hþB ð26Þ
€h ¼
€yx
€yy
€yz
8>><>>:
9>>=>>; B¼
� _yy_yzcosyy
_yx_yyðcosyxcosyy�sinyxÞ�
_yy_yzsinyxsinyy
� _yx_yyðcosyxþsinyxcosyyÞ�
_yy_yzsinyycosyx
8>><>>:
9>>=>>;ð27Þ

0
20
F.J. Sun et al. / Ocean Engineering 38 (2011) 529–540534
Substituting Eq. (26) into Eq. (24) leads to the equation ofrotational motion of the towed body in terms of the Euler angles
~IA €h ¼ shþstþsb�x�H�~IB ð28Þ
Eq. (28) is asymmetric and will be inconvenient to coupledirectly with the finite element equation of cable system that issymmetric. To eliminate the asymmetry, we multiply both sides ofEq. (28) with AT to obtain a symmetric equations of rotationalmotion of the towed body, such that
ðAT ~IAÞ €h ¼ ATðshþstþsb�x� H�~IBÞ ð29Þ
-200
-225
-250
Dep
th (
Met
res)
-275
-300
6°
3°
0°
Rol
l (D
egre
es)
-3°
-6°
10°
5°
0°
-5°
Pitc
h (D
egre
es)
-10°
-15°
200°
100°
0°
Yaw
(D
egre
es)
-100°
6
5
4
3
2Ten
sion
at B
ody
(10
kN)
400 600 800 1000 1200 1400 1600 1800
Time (Seconds)
Fig. 5. Comparison of the time histories between sea trial data and simulation
results.
Table 3Cable configurations.
Total cable
length (m)
Bare cable Fairing cable
Length (m) Elements Length (m) Elements
125 0 0 125 3
293 168 5 125 3
460 335 9 125 3
It should be noted that the equation of rotational motion for thetowed body will become singular when the pitch angle (yy)approaches 7901. In the reality, these two cases indicate thetowed body becomes nose up or down and the towed systembecomes unstable, which are not allowed practically in design.
40
60
80
Z (
Met
ers)
100
120
140-140-120-100-80-60-40-200
X (Meters)
0
50
100
150
200
Z (
Met
ers)
250
300-300-250-200-150-100-500
X (Meters)
0
50
100
150
200
250Z (
Met
ers)
300
350
400-400-350-300-250-200-150-100-500
X (Meters)
5 Knots 10 Knots 15 Knots
Fig. 6. Comparisons of straight tow of 125, 293 and 460 m cables at different speeds.
F.J. Sun et al. / Ocean Engineering 38 (2011) 529–540 535
Therefore, the generic form of the equation of rotational motion forthe towed body is sufficient for the present analysis.
The towed body is connected to the cable physically by aspherical joint located at the top of the towed body. To couple theequation of motion of the cable Eq. (22) with the equation of motionof the towed body Eqs. (23) and (28), a massless rigid cable elementis used to link the towed body at its CG to the end of tow cable, asshown in Fig. 2. The rigid cable element is a special case of the cable
2500
2000
1500
1000
500
Y (
Met
ers)
0
-5001500 2000 2500 3000 3500 4000
X (Meters)
Ship
Body
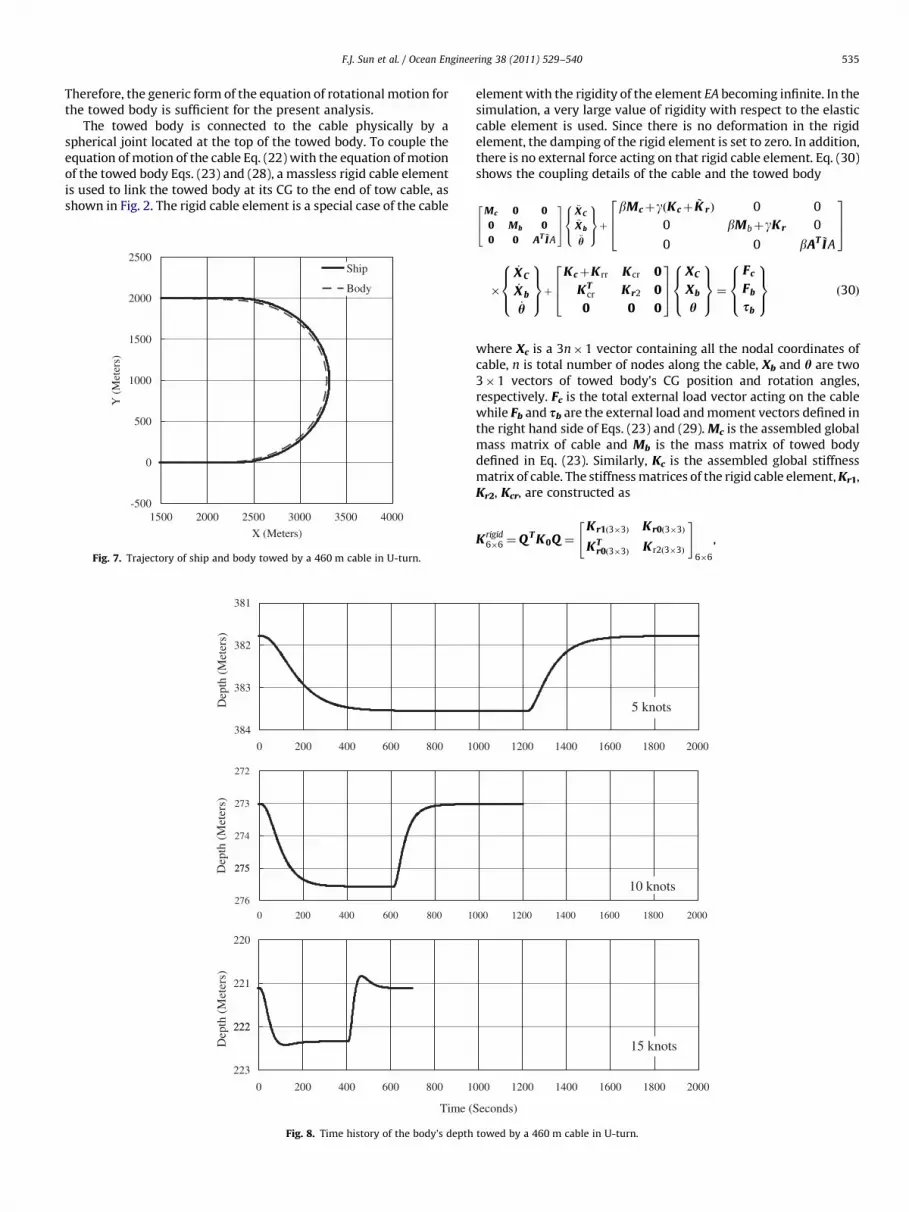
Fig. 7. Trajectory of ship and body towed by a 460 m cable in U-turn.
381
382
383
384
Dep
th (
Met
ers)
0 200 400 600 800 1
272
273
274
275275Dep
th (
Met
ers)
276
0 200 400 600 800 1
220
221
222222
Dep
th (
Met
ers)
223
0 200 400 600 800 1
Time (
Fig. 8. Time history of the body’s depth
element with the rigidity of the element EA becoming infinite. In thesimulation, a very large value of rigidity with respect to the elasticcable element is used. Since there is no deformation in the rigidelement, the damping of the rigid element is set to zero. In addition,there is no external force acting on that rigid cable element. Eq. (30)shows the coupling details of the cable and the towed body
Mc 0 0
0 Mb 0
0 0 AT ~IA
264
375
€X C
€X b
€h
8><>:
9>=>;þ
bMcþgðKcþ~K rÞ 0 0
0 bMbþgKr 0
0 0 bAT ~IA
264
375
�
_X C
_X b
_h
8><>:
9>=>;þ
KcþKrr Kcr 0
KTcr Kr2 0
0 0 0
264
375
XC
Xb
h
8><>:
9>=>;¼
Fc
Fb
sb
8><>:
9>=>; ð30Þ
where Xc is a 3n�1 vector containing all the nodal coordinates ofcable, n is total number of nodes along the cable, Xb and h are two3�1 vectors of towed body’s CG position and rotation angles,respectively. Fc is the total external load vector acting on the cablewhile Fb and sb are the external load and moment vectors defined inthe right hand side of Eqs. (23) and (29). Mc is the assembled globalmass matrix of cable and Mb is the mass matrix of towed bodydefined in Eq. (23). Similarly, Kc is the assembled global stiffnessmatrix of cable. The stiffness matrices of the rigid cable element, Kr1,Kr2, Kcr, are constructed as
Krigid6�6 ¼Q T K0Q ¼
Kr1ð3�3Þ Kr0 3�3ð Þ
KTr0ð3�3Þ Kr2ð3�3Þ
" #6�6
,
000 1200 1400 1600 1800 2000
000 1200 1400 1600 1800 2000
000 1200 1400 1600 1800 2000
Seconds)
5 knots
10 knots
15 knots
towed by a 460 m cable in U-turn.

F.J. Sun et al. / Ocean Engineering 38 (2011) 529–540536
Krr ¼03ðn�1Þ�3ðn�1Þ 03ðn�1Þ�3
0ð3�3Þðn�1Þ Kr1ð3�3Þ
" #3n�3n
, Kcr ¼03ðn�1Þ�3
Kr0ð3�3Þ
" #3n�3
ð31Þ
The cable towed body system will be towed by either a surfaceship or a submarine at the tow point. Therefore, the boundarycondition for the Eqs. (22), (23) and (28) will be the motion ofthe tow point which is input as the prescribed positions (X, Y, Z)varying with the time. In addition, the quasi-steady state ofthe system towed in a straight line is used as initial conditions.The solution of the quasi-steady state is obtained by solving theequation of motion, Eq. (30), iteratively without the accelerationand damping terms
4. Simulation results and discussions
Based on above derivation, one would notice that the NPFEM usesthe existing finite element but changes the state variable from nodaldisplacement to nodal position. Therefore, the element used inNPFEM is the same as those used in existing FEM and we only need toexam the methodology itself. The NPFEM has been implementedinto a computer program. The equation of motion of the cable towedbody system, Eq. (30), is highly nonlinear and has been solvednumerically using the Newmark time integration scheme.
4.1. Comparison with sea trial data
Consider a submerged cable towed body system towed by asurface ship in a sea trial, see Fig. 3. The ship was travelling at a
31750
31700
31650
Ten
sion
(N
ewto
ns)
Ten
sion
(N
ewto
ns)
Ten
sion
(N
ewto
ns)
31600
32800
0 200 400 600 800
32700
32600
32500
32400
0 200 400 600 800
37000
36800
36600
36400
36200
0 200 400 600 800
Time
Fig. 9. Time history of cable (460 m) t
speed of approximately 6.17 m/s (12 knots) and executed a series ofturns. The cable was towed at 22.2 km/h (12 knots) speed while theship executed a 270-degree turn. The total cable length was 460 mwith 125 m fairing cable at the bottom and 335 m bare cable at thetop. The drag coefficients of the bare cable are
CDt ¼D0ð�0:019þ0:0239cosaþ0:02sinaþ0:001cos2aÞ
CDn ¼D0sin2a ð32Þ
while the drag coefficients of the fairing cable are
CDt ¼D0ð0:273þ0:827a2ÞcosaCDn ¼D0ð0:273þ0:827a2Þsina
9=;0orao30o
CDt ¼D0sinacosaCDn ¼D0sin2a
9=;30orar90o
9>>>>>>>>=>>>>>>>>;
ð33Þ
The bare cable was divided into nine cable elements equally whilethe fairing cable was divided into three cable elements equally. Tables 1and 2 show the parameters of the cable and towed body system.Measured ship motions at the towing point were input as theprescribed boundary conditions. Fig. 4 shows the measured shiptrajectory (thick line) together with the simulated body’s trajectory(thin line) in the horizontal plane. As the ship commences its turn, thetowed body follows the turn very closely with a slightly tighter radiusas is expected and agrees with the field observations. Along the straightsections of ship’s trajectory, the towed body is aligned with the ship’sdirection vector. The simulated time histories of the towed-body’sdepth, roll, pitch, yaw and cable tension at the towed body are then
5 knots
1000 1200 1400 1600 1800 2000
10 knots
1000 1200 1400 1600 1800 2000
15 knots
1000 1200 1400 1600 1800 2000
(Seconds)
ension at towing point in U-turn.
F.J. Sun et al. / Ocean Engineering 38 (2011) 529–540 537
compared with the measured data in Fig. 5. Good agreement isobserved between the simulation and the trial data.
4.2. Case study of a cable towed body system
4.2.1. Steady state straight tow
Steady straight tow is a typical case for the operation of thetowed cable system. In this section, we investigate the steady stateof three cable configurations (125, 293, 460 m) towed at threedifferent speeds: 9.26 km/h (5 knots), 18.52 km/h (10 knots) and27.78 km/h (15 knots), respectively. These speeds cover the mostoperational range of the towed system. Table 3 shows the threecable configurations. The first configuration is a 125 m cable, allfairing. It represents the beginning phase during deploying/reco-vering processes. The fairing cable is modeled with three elements
270.0
270.5
Dep
th (
Met
ers)
Dep
th (
Met
ers)
Dep
th (
Met
ers)
271.00 400 800
210.0
210.5
211.0
173.5
0 400 800
174.0
174.50 400 800
Time
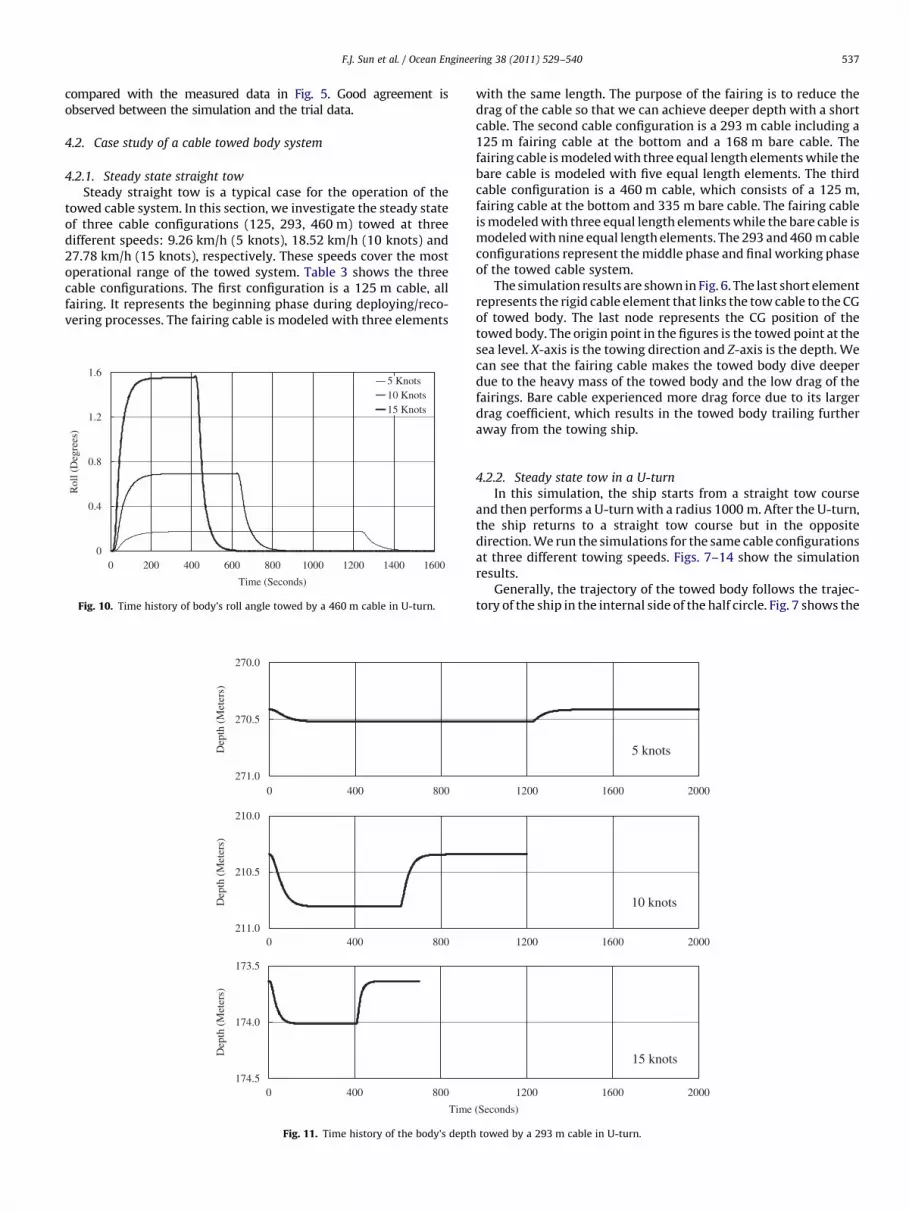
Fig. 11. Time history of the body’s depth
1.65 Knots10 Knots
1.215 Knots
0.8
Rol
l (D
egre
es)
0.4
00
Time (Seconds)
200 400 600 800 1000 1200 1400 1600
Fig. 10. Time history of body’s roll angle towed by a 460 m cable in U-turn.
with the same length. The purpose of the fairing is to reduce thedrag of the cable so that we can achieve deeper depth with a shortcable. The second cable configuration is a 293 m cable including a125 m fairing cable at the bottom and a 168 m bare cable. Thefairing cable is modeled with three equal length elements while thebare cable is modeled with five equal length elements. The thirdcable configuration is a 460 m cable, which consists of a 125 m,fairing cable at the bottom and 335 m bare cable. The fairing cableis modeled with three equal length elements while the bare cable ismodeled with nine equal length elements. The 293 and 460 m cableconfigurations represent the middle phase and final working phaseof the towed cable system.
The simulation results are shown in Fig. 6. The last short elementrepresents the rigid cable element that links the tow cable to the CGof towed body. The last node represents the CG position of thetowed body. The origin point in the figures is the towed point at thesea level. X-axis is the towing direction and Z-axis is the depth. Wecan see that the fairing cable makes the towed body dive deeperdue to the heavy mass of the towed body and the low drag of thefairings. Bare cable experienced more drag force due to its largerdrag coefficient, which results in the towed body trailing furtheraway from the towing ship.
4.2.2. Steady state tow in a U-turn
In this simulation, the ship starts from a straight tow courseand then performs a U-turn with a radius 1000 m. After the U-turn,the ship returns to a straight tow course but in the oppositedirection. We run the simulations for the same cable configurationsat three different towing speeds. Figs. 7–14 show the simulationresults.
Generally, the trajectory of the towed body follows the trajec-tory of the ship in the internal side of the half circle. Fig. 7 shows the
5 knots
1200 1600 2000
10 knots
1200 1600 2000
15 knots
1200 1600 2000
(Seconds)
towed by a 293 m cable in U-turn.

125.90
125.95
Dep
th (
Met
ers)
Dep
th (
Met
ers)
Dep
th (
Met
ers)
5 knots
126.000 400 800 1200 1600 2000
118.00
118.05
10 knots
118.10
103.80
0 400 800 1200 1600 2000
103.90
104.00
15 knots104.10
0 400 800 1200 1600 2000
Time (Seconds)
Fig. 13. Time history of body’s depth towed by a 125 m fairing cable in U-turn.
31690
5 knots31685
31680
31675
31670
32700
0 400 800 1200 1600 2000
10 knots32650
32600
32550
32500
37000
0 400 800 1200 1600 2000
15 knots36900
36800
36700
Ten
sion
(N
ewto
ns)
Ten
sion
(N
ewto
ns)
Ten
sion
(N
ewto
ns)
366000 400 800 1200 1600 2000
Time (Seconds)
Fig. 12. Time history of cable (293 m) tension at towing point in U-turn.
F.J. Sun et al. / Ocean Engineering 38 (2011) 529–540538

31678
5 knots31677
31676
31675
31674T
ensi
on (
New
tons
)T
ensi
on (
New
tons
)T
ensi
on (
New
tons
)0 400 800 1200 1600 2000
32640
3265010 knots
32630
32620
32610
32600
37000
0 400 800 1200 1600 2000
15 knots36950
36900
36850
368000 400 800 1200 1600 2000
Time (Seconds)
Fig. 14. Time history of cable (125 m) tension at towing point in U-turn.
F.J. Sun et al. / Ocean Engineering 38 (2011) 529–540 539
trajectories of the ship and the towed body for a 460 m cable at27.78 km/h (15 knots) tow speed. With other shorter cables andslower tow speeds, the radius of the towed body’s U-turn might beslightly different, but the body’s trajectories are all within the halfcircle of ship’s trajectory. When the ship enters into the turn, theforward towing speed reduces due to radial speed component. As aresult, the lift force on the towed body reduces and the towed bodydives deeper until it reaches a new balance position of circularmotion and then keeps that depth during the turn. After the shipexits the turn and moves straight again, the towed body’s depthdecreases due to the increase of towing speed in its forward axisand returns to the previous depth before the U-turn, see Fig. 8 forthe depth variations of the towed body in a U-turn towed by a460 m cable at 9.26 km/h (5 knots), 18.52 km/h (10 knots) and27.78 km/h (15 knots) tow speeds, respectively. Accordingly, as thetowed body’s depth increases, the cable tension will decrease, SeeFig. 9 for the tension variation of a 460 m cable towed at threedifferent speeds. In addition, a faster turning speed of the shipresults in larger roll angles of the towed body, see Fig. 10 for the rollangle variation in a U-turn at different tow speeds towed by 460 mcable. Similar trends can be found in simulations of 293 m cablelengths, respectively, see Figs. 11–14. However, the short cable(125 m) performs differently than the long cable. Fig. 12 shows thedepth of the towed body towed by 125 m cable actually decreasesas it enters into the curved trajectory. The reason is that the shortercable is acting like a straight bar compared to the longer cable thathas the bow-shape curved configuration, see Figs. 7 and 9. For thelong tow cable, the towed body’s trajectory is inside the curvedtrajectory of the tow ship and it moves at a slower speed than thetow ship’s speed. Thus, the towed body will dive due to the reducedlift. However, for the short tow cable, the towed body’s trajectory isactually outside the curved trajectory of the tow ship and it movesat a faster speed than the tow ship’s speed. Thus, the towed bodywill move up due to the increased lift.
5. Conclusion
A new nodal position finite element method has been developedto solve the position of the cable directly instead of the summationof displacement and previous position in the existing FEM. Theexisting FEM, which is displacement based, is prone to theaccumulated errors arising from every time step over a long timesimulation. The newly derived nodal position finite elementmethod eliminates the need of decoupling the rigid body motionfrom the total motion, where numerical errors arise in the existingnonlinear finite element method, and the limitation of smallrotation in each time step in the existing nonlinear finite elementmethod. In addition, a special element and procedure have beendeveloped to couple the cable element with the towed body.Simulation results show that this newly derived method is accurateand robust as seen in comparisons with the sea trials. Finally, casestudies of the cable towed body system are conducted for threedifferent cable configurations at three different tow speeds.
Acknowledgments
This work was supported by the National Science and Engineer-ing Research Council of Canada, Ontario Centers of Excellences andCurtiss-Wright Flow Controls, Indal Technologies.
References
Ablow, C.M., Schechter, S., 1983. Numerical simulation of undersea cable dynamics.Ocean Eng. 10 (6), 443–457.
Burgess, J.J., 1999. Equations of motion of a submerged cable with bending stiffness.J. Offshore Mech. Arct. 1-A, 283–289.
Duvat, G., Large, C., 1997. Experimental study of the dynamic behaviour of a towedsystem. In: Proceedings of the Seventh International Offshore and PolarEngineering Conference 2, pp. 17–22.

F.J. Sun et al. / Ocean Engineering 38 (2011) 529–540540
Huang, S., 1994. Dynamic analysis of three-dimensional marine cables. Ocean Eng.21 (6), 587–605.
Koh, C.G., Rong, Y., 2004. Dynamic analysis of large displacement cable motion withexperimental verification. J. Sound Vib. 272 (1–2), 187–206.
Koh, C.G., Zhang, Y., Quek, S.T., 1999. Low-tension cable dynamics: numerical andexperimental studies. J. Eng. Mech.-ASCE. 125 (3), 347–354.
Shabana, A.A., 1998. Computer implementation of the absolute nodal coordinateformulation for flexible multibody dynamics. Nonlinear Dyn. 16 (3), 293–306.
Simo, J.C., Tarnow, N., Wong, K.K., 1992. Exact energy-momentum conservingalgorithms and symplectic schemes for nonlinear dynamics. Comput. MethodsAppl. Mech. Eng. 100, 63–116.
Sun, F.J., 2010. Elastodynamic analysis of towed cable systems by a novel nodalposition finite element method, Master Thesis, York University.
Tuwankotta, J.M., Quispel, G.R.W., 2003. Geometric numerical integration applied tothe elastic pendulum at higher-order resonance. J. Comput. Appl. Math. 154 (1),229–242.
Webster, W.C., 1995. Mooring-induce damping. Ocean Eng. 22 (6), 571–591.Zhu, Z.H., Meguid, S.A., Ong, L.S., 2003, Dynamic multiscale simulation of towed
cable and body. In: Proceedings of Computational Fluid and Solid Mechanics2003, 1–2, pp. 800–803.
Zhu, Z.H., Meguid, S.A., 2006. Elastodynamic analysis of aerial refueling hose usingcurved beam. AIAA J. 44 (6), 1317–1324.
Zhu, Z.H., Morrow, B., 1998. A novel computer simulator for cable-towed submergedvehicles. Hydroelasticity Mar. Technol. (Hydroelasticity’ 98), 284–292 Fukuoka,Japan.
Related Documents