Dynamic instabilities in scalar neural field equations with space-dependent delays N A Venkov and S Coombes and P C Matthews School of Mathematical Sciences, University of Nottingham, Nottingham, NG7 2RD, UK. Abstract In this paper we consider a class of scalar integral equations with a form of space- dependent delay. These non-local models arise naturally when modelling neural tissue with active axons and passive dendrites. Such systems are known to support a dynamic (oscillatory) Turing instability of the homogeneous steady state. In this paper we develop a weakly nonlinear analysis of the travelling and standing waves that form beyond the point of instability. The appropriate amplitude equations are found to be the coupled mean-field Ginzburg–Landau equations describing a Turing–Hopf bifurcation with modulation group velocity of O(1). Importantly we are able to obtain the coefficients of terms in the amplitude equations in terms of integral transforms of the spatio-temporal kernels defining the neural field equation of interest. Indeed our results cover not only models with axonal or dendritic delays but those which are described by a more general distribution of delayed spatio- temporal interactions. We illustrate the predictive power of this form of analysis with comparison against direct numerical simulations, paying particular attention to the competition between standing and travelling waves and the onset of Benjamin–Feir instabilities. Key words: neuronal networks, integral equations, space dependent delays, dynamic pattern formation, travelling waves, amplitude equations. Preprint submitted to Elsevier Science 27 April 2007

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Dynamic instabilities in scalar neural field
equations with space-dependent delays
N A Venkov and S Coombes and P C Matthews
School of Mathematical Sciences, University of Nottingham, Nottingham, NG7
2RD, UK.
Abstract
In this paper we consider a class of scalar integral equations with a form of space-
dependent delay. These non-local models arise naturally when modelling neural
tissue with active axons and passive dendrites. Such systems are known to support
a dynamic (oscillatory) Turing instability of the homogeneous steady state. In this
paper we develop a weakly nonlinear analysis of the travelling and standing waves
that form beyond the point of instability. The appropriate amplitude equations
are found to be the coupled mean-field Ginzburg–Landau equations describing a
Turing–Hopf bifurcation with modulation group velocity of O(1). Importantly we
are able to obtain the coefficients of terms in the amplitude equations in terms of
integral transforms of the spatio-temporal kernels defining the neural field equation
of interest. Indeed our results cover not only models with axonal or dendritic delays
but those which are described by a more general distribution of delayed spatio-
temporal interactions. We illustrate the predictive power of this form of analysis with
comparison against direct numerical simulations, paying particular attention to the
competition between standing and travelling waves and the onset of Benjamin–Feir
instabilities.
Key words: neuronal networks, integral equations, space dependent delays,
dynamic pattern formation, travelling waves, amplitude equations.
Preprint submitted to Elsevier Science 27 April 2007

1 Introduction
The ability of neural field models to exhibit complex spatio-temporal dynamics has been
studied intensively since their introduction by Wilson and Cowan [1]. They have found
wide application in interpreting experiments in vitro e.g. electrical stimulation of slices of
neural tissue [2–5] and phenomena in vivo such as the synchronisation of cortical activity
during epileptic seizures [6] or uncovering the mechanism of geometric visual hallucina-
tions [7–9]. The sorts of dynamic behaviour that are typically observed in neural field
models includes, spatially and temporally periodic patterns (beyond a Turing instability)
[7,8], localised regions of activity (bumps and multi-bumps) [10,11] and travelling waves
(fronts, pulses, target waves and spirals) [12,13]. The equations describing the evolution
of the activity in the neural field typically take the form of integro-differential or integral
equations. A variety of modifications have been put forward adding various biological
mechanisms to the original model. For a recent review see [14].
It is the purpose of this paper to consider in more detail the role of axonal and den-
dritic delays in generating novel spatio-temporal patterns. Specifically, we are interested
in patterns emerging via Turing-type instabilities of the homogeneous steady state. There
are four different types of instability that generically occur, giving rise to i) shift to a
new uniform stationary state, ii) stationary periodic patterns, iii) uniform global (bulk)
oscillations and iv) travelling (oscillatory) periodic patterns. We shall refer to i) and ii) as
static instabilities and iii) and iv) as dynamic. Note that in the original two-population
model (without space-dependent delays) developed by Wilson and Cowan [1] there are
two time scales and two space-scales: the different membrane time-constants for the ex-
citatory and inhibitory synapses, and the associated spatial interaction scales. However,
in order to decrease the dimensionality of the system it is common to assume that in-
hibitory synapses act much faster than the excitatory. The unequal finite spatial scales
are preserved in the form of the connectivity kernel of the new single equation (often of
Mexican hat shape), but one of the temporal scales is lost. This is the type of reduced
system we consider here, with the notable exception that we bring back another time-scale
associated with a space-dependent delay. Space-dependent delays arise naturally through
two distinct signal processing mechanisms in models of neural tissue. Axonal delays are
associated with the finite speed of action potential propagation. In models with dendrites
there is a further distributed delay associated with the arrival of input at a synapse away
from the cell-body. It is precisely the inclusion of these biological features that can give
2

rise to not only static, but dynamic Turing instabilities. For examples of the treatment of
truly two-population models and the possibility of oscillatory pattern formation without
space-dependent delays we refer the reader to Tass [8] and Bressloff and Cowan [9].
Axonal delays arise due to the finite speed of action potential propagation in transferring
signals between distinct points in the neural field and are modelled in the work of [15,1,16]
as simple space-dependent delays. Delays arising from the processing of incoming synaptic
inputs by passive dendritic trees may also be incorporated into neural field models, as in
the work of Bressloff [17]. In both cases it is now known that these space-dependent delays
can lead to a dynamic Turing instability of a homogeneous steady state. These were first
found in neural field models by Bressloff [17] for dendritic delays and more recently by
Hutt et al. [18] for axonal delays. Both these studies show that a combination of short
range inhibition and longer range excitation with a space-dependent delay may lead to a
dynamic instability. This choice of connectivity, which we shall call inverted Mexican hat,
is natural when considering cortical tissue and remembering that principal pyramidal cells
i) are often enveloped by a cloud of inhibitory interneurons, and ii) that long range cortical
connections are typically excitatory [19–21]. Detailed examination by linear analysis on the
relation between the connectivity shape (the balance between excitation and inhibition)
and the dominant pattern type has been done by Hutt [22]. Roxin et al. did similar work
for a model with fixed discrete delay [23].
Our main result will be to go beyond the linear analysis of Bressloff [17] and Hutt et al.
[18] and to develop amplitude equations for a one dimensional scalar neural field equation
with space-dependent delays. Although borrowing heavily from techniques in the PDE
community for the weakly nonlinear analysis of states beyond a Turing bifurcation [24–26],
our analysis is complicated by the fact that it deals with pattern forming models described
by integral equations. Previously amplitude equations in the context of neural field models
have been derived also in [27–29]. Importantly we work with integral equations describing
neural fields with both axonal and dendritic processing. Although they have existed as
models for some time they are far less studied than models lacking such biologically
realistic terms. Our formulation is general and encompasses a number of such models.
When deriving the amplitude equations we consider also the effects of space-dependant
modulation and show that the appropriate equations are the mean–field Ginzburg–Landau
equations [30].
In Section 2 we introduce the class of models we shall consider and describe how they can
3

be written as integral equations with a particular spatio-temporal convolution structure.
Next in Section 3 we analyse the linear stability of the homogeneous steady state and de-
rive the conditions for the onset of a dynamic Turing (Turing–Hopf) instability point. In
Section 4 we derive the amplitude equations via a multiple-scales analysis. These ampli-
tude equations are analysed in Section 5 to determine the selection process for travelling
as opposed to standing waves. Moreover, we also consider Benjamin–Feir modulational
instabilities in which a periodic travelling wave (of moderate amplitude) loses energy to a
small perturbation of other waves with nearly the same frequency and wavenumber. Nu-
merical experiments are presented to illustrate and support our analysis of the amplitude
equations. In Section 6 we consider the generalisation of our approach to tackle models
with a form of spike frequency adaptation. We show that this can strongly influence the
selection process for travelling versus standing waves. Finally in Section 7 we discuss other
natural extensions of the work we have presented in this paper.
2 The model
In many continuum models for the propagation of electrical activity in neural tissue it
is assumed that the synaptic input current is a function of the pre-synaptic firing rate
function [31,15,10,32]. When considering a simple one-dimensional system of identical neu-
rons communicating through excitatory and inhibitory synaptic connections it is typical
to arrive at models of the form
u(x, t) =∫ ∞
−∞dy w(x − y)
∫ t
−∞ds η(t − s)f(u(y, s − |x − y|/v)). (1)
Here, u(x, t) is identified as the synaptic activity at position x ∈ R at time t ∈ R+. The
firing rate activity generated as a consequence of local synaptic activity is simply f(u),
where the firing rate function f is prescribed purely in terms of the properties of some
underlying single neuron model or chosen to fit experimental data. A common choice for
the firing rate function is the sigmoid
f(u) = (1 + exp(−β(u − h)))−1, (2)
with steepness parameter β > 0 and threshold h > 0. The spatial kernel w(x) = w(|x|)describes not only the anatomical connectivity of the network, but also includes the sign
of synaptic interaction. For simplicity it is also often assumed to be isotropic and homo-
geneous, as is the case here. The temporal convolution involving the kernel η(t) (η(t) = 0
4

xy
z0
dendrite
synapse
soma
axons xy
z0
z0+φ|x-y|
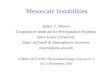
Fig. 1. Examples of two neural field models with dendritic cable that we consider in this paper.
Left: All synaptic inputs impinge on the same site at a distance z0 from the soma. Right: Here
the distance of the synapse from the soma is linearly correlated with the spatial separation |x−y|between neurons.
for t < 0) represents synaptic processing of signals within the network, whilst the delayed
temporal argument to u under the spatial integral represents the delay arising from the
finite speed of signals travelling between points x and y; namely |x − y|/v where v is the
velocity of action potential. In models with dendrites there is a further space-dependent
delay associated with the processing of inputs at a synapses away from the cell-body. A
simple way to incorporate this in a model is to represent the dendritic tree as a single
passive cable with diffusive properties (see below).
By introducing the kernel K(x, t) = w(x)δ(t − |x|/v) we can re-write (1) in the succinct
form
u = η ∗ K ⊗ f ◦ u, (3)
where we have introduced the two-dimensional convolution operation ⊗:
(K ⊗ g)(x, t) =∫ ∞
−∞ds
∫ ∞
−∞dy K(x − y, t − s)g(y, s), (4)
for g = g(x, t), and the temporal convolution operation ∗:
(η ∗ h)(t) =∫ ∞
0ds η(s)h(t − s), (5)
for h = h(t). The form of (3) allows us to naturally generalize a model with axonal delays
to one with dendritic delays or any other type of time-dependent connectivity. For example
the model of Bressloff [17,33] incorporating a neuron with a semi-infinite dendritic cable
5

with potential v = v(z, t), z ∈ R+ is written
∂tv = −v/τD + D∂zzv + I(x, z, t),
I(x, z, t) =∫ ∞
−∞dy w(x − y, z)
∫ ∞
−∞ds η(t − s)f(u(y, s)). (6)
Here w(x, z) is an axo-dendritic connectivity function depending not only upon cell-cell
distances |x|, but on dendritic distances z also. Assuming that there is no flow of current
back from the cell body (soma) at z = 0 to the dendrite then the neural field equation is
simply given by u(x, t) = v(x, 0, t). Hence, this dendritic model is recovered by (3) with
the choice K(x, t) =∫ ∞0 dz w(x, z)E(z, t), where E(z, t) = e−t/τD e−z2/4Dt /
√πDt is the
Green’s function of the semi-infinite cable equation (and E(z, t) = 0 for t < 0). With a
single synapse at a fixed distance z0 > 0 from the cell body w(x, z) = w(x)δ(z − z0), the
generalized connectivity function is separable, taking the form K(x, t) = w(x)E(z0, t). We
will also look at non-separable models with space-dependent dendritic delays w(x, z) =
w(x)δ(z−z0−φ|x|). In these models axons from more distant neurons arborize further up
the dendritic cable in accordance with anatomical data [34]. See Fig. 1 for an illustration.
In fact throughout this paper we shall consider the model as written in the form of (3), and
allow for arbitrary choices of K = K(x, t), subject to K(x, t) = K(|x|, t) and K(x, t) = 0
for t < 0, such that the classic axonal and dendritic delay models are recovered as special
cases. Later in Section 6 we shall consider further generalizations of (3) to include the
effects of neuronal modulation and adaptation.
3 Turing instability analysis
In this paper we are primarily interested in the analysis of pattern formation beyond a
Turing instability for the neural field equation given by (3). It is the dependence of K on
the pair (x, t) rather than just x, as would be the case in the absence of space-dependent
delays, that can give rise to not only static, but dynamic Turing instabilities. Here we
briefly re-visit the standard linear Turing instability analysis, along similar lines to that of
Bressloff [17] and Hutt et al. [18]. For a general review of pattern formation and pattern
forming instabilities we refer the reader to [35–38]. For a discussion of pattern formation
within the context of neural field models we suggest the articles by Ermentrout [39] and
Bressloff [40].
Let u(x, t) = u be the spatially-homogeneous steady state of equation (3). The conditions
6

for the growth of inhomogeneous solutions can be obtained through simple linear stability
analysis of u. Namely, we look for instabilities to spatial perturbations of globally periodic
type eikx and determine the intrinsic wavelength 2π/k of the dominant growing mode.
From (3) the homogeneous steady state satisfies
u = η(0)K(0, 0)f(u), (7)
where we have introduced the following Laplace and Fourier-Laplace integral transforms:
η(λ) =∫ ∞
0ds η(s) e−λs, K(k, λ) =
∫ ∞
−∞dy
∫ ∞
0ds K(y, s) e−(iky+λs) . (8)
We Taylor-expand the firing rate function, which is the only nonlinearity in the system,
around the steady state f(u) = f(u)+γ1(u−u)+γ2(u−u)2 + . . . to obtain the linearised
model
u − u = γ1η ∗ K ⊗ (u − u). (9)
The control parameter for our bifurcation analysis is therefore γ1 = f ′(u). To obtain the
conditions for linear stability we consider solutions of the form u − u = Re eλt+ikx where
λ = ν + iω ∈ C. Although the system and its solutions are real, for conciseness we will
often work with the complex extension and restrict our attention to the real case when
this has implications for the analysis. After substitution into (9) we obtain a dispersion
relation for (k, λ) in the form L(k, λ) = 0, where
L(k, λ) = 1 − γ1η(λ)K(k, λ). (10)
For a fixed γ1 solving L(k, λ) = 0 defines a function λ(k). An instability occurs when for
the first time there are values of k at which the real part of λ is nonnegative (see Fig. 2,
left). A Turing bifurcation point is defined as the smallest value γc of the control parameter
for which there exists some kc 6= 0 satisfying Re (λ(kc)) = 0. It is said to be static if
Im (λ(kc)) = 0 and dynamic if Im (λ(kc)) ≡ ωc 6= 0. The dynamic instability is often
referred to as a Turing–Hopf bifurcation and generates a global pattern with wavenumber
kc, which moves coherently with a speed c = ωc/kc, i.e. as a periodic travelling wave train.
If the maximum of the dispersion curve is at k = 0 then the mode that is first excited
is another spatially uniform state. If ωc 6= 0, we expect the emergence of a homogeneous
limit cycle with temporal frequency ωc.
For simplicity we will assume that at γ1 = γc the associated value of kc is unique (up to a
sign change). Since K is an even function of the space variable, wave-numbers will always
7

k
ν
0
ν = 0
γ1=γ
c
γ1>γ
c
kc
-4
-2
0
2
4
-2 -1 0 1
λ=iωc
ν
ω λ(±k)
λ=-iωc
Fig. 2. Left: An illustration of the mechanism for a Turing instability: as γc is increased a range
of wavenumbers around kc become linearly unstable. Right: A typical dispersion curve in the
complex (ν, ω)-plane by a complex conjugate pair of roots as k is varied, plotted at the critical
value γ1 = γc.
come in pairs ±kc and because the problem is real the dispersion curve has reflective
symmetry around the real axis and frequencies ±ωc will also appear together as solutions.
Hence, the eigenspace of the linear equation will be real and at γc a complete basis is
given by{cos(ωct + kcx), cos(ωct − kcx), sin(ωct + kcx), sin(ωct − kcx)
}. (11)
Beyond a Turing instability (kc 6= 0) we expect the growth of patterns of the form
ei(kcx±ωct) + cc (where cc stands for complex conjugate), with ωc = 0 for a static instability,
ωc 6= 0 for a dynamic instability and kc = 0 at a Hopf bifurcation. Note that for a dynamic
instability, generically giving rise to periodic travelling waves, it may also be possible to
see a standing wave, arising from the interaction of a left and right travelling wave. To
determine the conditions under which this may occur it is necessary to go beyond a linear
analysis and determine the evolution of mode amplitudes. The techniques to do this will
be described in Section 4, where we also see that the growing solutions predicted by the
linear analysis converge to patterns with certain finite amplitude due to the nonlinear
(saturating) properties of the model.
Next we consider some illustrative examples and compare the linear instability predictions
with direct numerical simulations. To do this we write λ = ν + iω and split the dispersion
relation into real and imaginary parts to obtain
G(ν, ω) = 0, H(ν, ω) = 0, (12)
8

-5
0
5
10
15
20
25
0 1 2 3 4 5
w0γ1
υ
Rest state
Dynamic Turing
Static Turingkc≠0, ω
c=0
kc=0,
ωc≠0
kc≠0, ωc
≠0
kc=0, ω
c≠0
Hopfa
b
d
c
Fig. 3. Critical curves showing the instability threshold γc as a function of the axonal speed v
for the model in Section 3.1.
where G(ν, ω) = Re L(k, ν + iω) and H(ν, ω) = Im L(k, ν + iω). Solving the system of
equations (12) gives us a curve in the plane (ν, ω) parameterised by k. A static bifurcation
may thus be identified with the tangential intersection of ω = ω(ν) along the line ν = 0 at
the point ω = 0. Similarly a dynamic bifurcation is identified with a tangential intersection
at ω 6= 0 (see Fig. 2, right). We are required to track points in parameter space for which
ν ′(ω) = 0. This is equivalent to tracking points where
∂kG∂ωH − ∂kH∂ωG = 0. (13)
9

a d
c
b
6π0
50
2π02π02π00 0
300
t
max u
u(x,t)
min u
3350
50
3400
0
200
100
300
3100
3150
0
Fig. 4. Space-time plots of solutions corresponding to points a-d in the parameter plot on Fig. 3
with the choice f(u) = γ1u − 0.2u3. The model is simulated with periodic boundary conditions
and random initial conditions. Legend: a. travelling wave (standing wave is initially selected due
to the numerical discretization but it is unstable as we will show in sec.5); b. bulk oscillation;
c. static pattern; d. large wavenumber waves. Similar results are obtained for other saturating
choices of f , such as the popular sigmoidal function (2).
3.1 An example: axonal delays
We take a wizard hat connectivity function
w(x) = −w0(1 − |x|) e−|x|, (14)
with space-dependent axonal delays such that K(x, t) = w(x)δ(x − |t|/v), as discussed
in Section 2. The global weight w0 allows us to study both inverted (w0 > 0) and stan-
dard (w0 < 0) wizard hat connectivities in a common framework. The Fourier-Laplace
transform of K(x, t) is
K(k, λ) = −2w0(a − 1)a2 + k2(a + 1)
(a2 + k2)2 , a = 1 +λ
v. (15)
Further, we choose the alpha function synaptic response η(t) = α2t e−αt Θ(t) where Θ(t)
is the Heaviside step function, Θ(t) = 1 for t ≥ 0 and Θ(t) = 0 otherwise. A simple
10

calculation gives η(λ) = (1 + λ/α)−2. The dispersion relation (10) can then be written
as a 6th-order polynomial of the form∑6
n=0 an(α, v, γ1, k)λn = 0. The expressions for
the coefficients an are easily calculated, though for brevity we do not list them here.
Full details will be given elsewhere [41]. Using numerical continuation we can track the
set of solution points (γc, kc, ωc) of the system of equations defined by (12) and (13) in
system parameter space. Moreover, we can construct a critical curve in (v, γ1)–parameter
space delimiting the region of stability of the homogeneous steady state. Here we track
all six roots of the dispersion relation and find that for w0 > 0 two pairs of complex
roots can cross into the positive half-plane with increasing γ1. One of these pairs crosses
with nonzero wavenumber kc(v) and the other with kc = 0. A plot of all critical curves
γ1 = γc(v) is shown on the left of Fig. 3. An illustration of corresponding solutions is
shown Fig. 4. For the standard wizard hat connectivity (w0 < 0) we see, as expected, that
the static Turing instability is independent of the axonal velocity v.
Several important qualitative features for the case w0 > 0 become clear from Fig. 3.
For any finite v there exists a positive threshold γ1 = γc(v) at which modes with some
wavenumber kc(v) become excited; on the other hand, as v → ∞, γc also tends to infinity.
The latter observation is consistent with the failure of models without axonal delay to
demonstrate dynamic pattern formation when the connectivity is of inverted wizard hat
type. A dynamic instability is first met for v = 1 and dominates for medium and large
speeds, while for small speeds there is a window of Hopf instability giving rise to spatially
coherent periodic oscillations (across the entire domain). As v becomes smaller than 0.1
the pattern wavenumber quickly, though continuously, shifts from k = 0 to very large
values. Direct numerical simulations of the full model shows excellent agreement with the
predictions of the linear instability analysis. Some examples are shown in Fig. 3. The
techniques used for direct numerical simulations of the models studied in this paper are
described in [42].
3.2 An example: dendritic delays
We make the same choices of w(x) and η(t) for the dendritic model given by (6) as in
the example just studied above with axonal delays with a synapse at a fixed distance
z0 from the soma. In this case the (separable) kernel describing the model is given by
K(x, t) = w(x)E(z0, t). Then the integral transform of K is K(λ, k) = w(k)E(λ, z0). We
have E(λ, z) = exp(−z√
κ + λ/D)/D√
κ + λ/D, where κ = 1/(DτD) and a real Fourier
11

transform w(k) = −4w0k2/(1 + k2)2 independent of λ. Hence, the critical wavenumber at
all instabilities is constant kc = 1. Although there are countably many eigenvalues only
two pairs can ever cross into the positive plane. The Turing instability curve for w0 as a
function of z0 is shown in Fig. 5, left. If we consider the synaptic contact point to be linearly
correlated with the distance between neuronal sites, then K(x, t) = w(x)E(z0 + φ|x|, t).In this case K(x, λ) is given by (15) with a = 1 + φ
√κ + λ. Note that to further include
axonal delays we would simply write a = 1+λ/v +φ√
κ + λ. Comparing the results from
Fig. 3 (left) and Fig. 5 (right) we see that, as expected, qualitatively there are strong
similarities between a model with purely axonal delays and one without axonal delays
possessing dendritic delays correlated to the distance between neuronal sites.
4 Weakly nonlinear analysis
A characteristic feature of the dynamics of systems beyond an instability is the slow
growth of the dominant eigenmode, giving rise to the notion of a separation of scales.
This observation is key in deriving the so-called amplitude equations. In this approach
information about the short-term behaviour of the system is discarded in favour of a
description on some appropriately identified slow time scale. By Taylor-expansion of the
dispersion curve near its maximum one expects the scalings ν ∼ γ1−γc, k−kc ∼√
γ1 − γc,
w0γ1
z0
Rest state
Dynamic Turing
Static Turing
kc=1, ω
c=0
kc=1, ω
c≠0
-10
0
10
20
30
40
0 0.5 1 1.5 2 2.5 3φ
Hopf
kc≠0, ωc=0
kc=0, ωc
≠0
k c≠0, ω c
≠0
Rest state
kc=0, ω
c=0
Static homogeneous
Dynamic
Turing
-10
0
10
20
30
0 0.5 1 1.5 2 2.5 3
Static Turing
Fig. 5. The Turing instability curves for a model with a passive dendritic cable. Left: With fixed
synaptic contact point at a distance z0 from the cell body. Right: With synaptic contact point
correlated with the distance between neuronal sites by z0 + φ|x|, z0 = 1. Other parameters are
α = τ = D = 1.
12

close to bifurcation, where γ1 is the bifurcation parameter. Since the eigenvectors at the
point of instability are of the type A1 ei(ωct+kcx) +A2 ei(ωct−kcx) + cc, for γ1 > γc emergent
patterns are described by an infinite sum of unstable modes (in a continuous band) of the
form eν0(γ1−γc)t ei(ωct+kcx) eik0
√γ1−γcx. Let us denote γ1 = γc + ǫ2δ where ǫ is arbitrary and δ
is a measure of the distance from the bifurcation point. Then, for small ǫ we can separate
the dynamics into fast eigen-oscillations ei(ωct+kcx), and slow modulations of the form
eν0ǫ2t eik0ǫx. If we set as further independent variables τ = ǫ2t for the modulation time-
scale and χ = ǫx for the long-wavelength spatial scale (at which the interactions between
excited nearby modes become important) we may write the weakly nonlinear solution
as A1(χ, τ) ei(ωct+kcx) +A2(χ, τ) ei(ωct−kcx) + cc. It is known from the standard theory [35]
that weakly nonlinear solutions will exist in the form of either travelling waves (A1 = 0
or A2 = 0) or standing waves (A1 = A2).
We are now in a position to derive the envelope or amplitude equations for patterns
emerging beyond the point of Turing–Hopf instability for the neural field model (3).
Here we omit the simpler case for the static Turing instability since it has already been
analysed in [43]. For a PDE system the general form of the amplitude equations can be
found very easily by considering the resonances in the system. Indeed the normal form
of the Turing–Hopf bifurcation is well-known to be a system of two coupled complex
Ginzburg–Landau equations [37]. To tackle an integral system we will use the lengthy
but systematic approach of multiple scales analysis. By doing so we ultimately obtain the
normal form for a bifurcation to patterns that have a non-zero group velocity. This type
of normal form was first found in [30] in the context of travelling wave convection.
4.1 Scale separation
Introducing the further intermediate time scale θ = ǫt, solutions to (3) satisfy
u(x, t, ǫx, ǫt, ǫ2t) =∫ t
−∞dr η(t−r)
∫ ∞
−∞dy
∫ ∞
−∞ds K(x−y, r−s)f ◦u(y, s, ǫy, ǫs, ǫ2s). (16)
Note that the operator on the right-side of (16) is not identical to the convolution η∗K⊗.
Here the integration acts on the last three variables as well, due to their ǫ-dependence on
x and t. In order to find the equation describing the slow dynamics we have to assess this
ǫ-dependent contribution. Here we will adopt an approach that considers a polynomial
expansion of the right hand side of (16) in powers of ǫ. The coefficients of this polynomial
are convolutions each acting at a single scale only. We begin by writing the solution as
13

an asymptotic expansion
u − u = ǫu1 + ǫ2u2 + ǫ3u3 + . . . , (17)
with, as yet, unknown functions ui = ui(x, t). Further, we substitute the firing rate func-
tion f by its Taylor-expansion f(u) = f(u) + γ1(u − u) + γ2(u − u)2 + . . . where the
coefficients γ2, γ3, . . . remain as free parameters that will participate in the final ampli-
tude equations. When we consider specific models in Section 5 we will map their firing
rate parametrizations and restrict these coefficients. To separate the scales at which the
integration acts, we write ǫy = ǫy + ǫx − ǫx = χ + ǫ(y − x), and similarly for ǫs and ǫ2s:
ui(y, s, ǫy, ǫs, ǫ2s) = ui(y, s, χ + ǫ(y − x), θ + ǫ(s − t), τ + ǫ2(s − t)). (18)
This enables us to make a Taylor expansion in the last three arguments to get
ui(y, s, ǫy, ǫs, ǫ2s) = ui(y, s, χ, θ, τ) + ǫ
[(y − x)
∂
∂χ+ (s − t)
∂
∂θ
]ui(y, s, χ, θ, τ)+
ǫ2
1
2
((y − x)
∂
∂χ+ (s − t)
∂
∂θ
)2
+ (s − t)∂
∂τ
ui(y, s, χ, θ, τ) + O(ǫ3). (19)
The slow variables χ, θ, τ are independent of y or s on which the integration acts and we
have a sum of convolutions of the type η ∗K⊗. In order to write down these convolutions
it is convenient to introduce the notation:
ηt(t) = −tη(t), ηtt(t) = t2η(t), Kx(x, t) = −xK(x, t), Kt(x, t) = −tK(x, t),
Kxt(x, t) = x tK(x, t), Kxx(x, t) = x2K(x, t), Ktt(x, t) = t2K(x, t). (20)
14

Then by using s− t = (r − t) + (s− r) (to step through the intermediate time scale), we
can write for each ui
∫ t
−∞dr η(t − r)
∫ ∞
−∞dy
∫ ∞
−∞ds η(t − r)K(x − y, r − s)ui(y, s, ǫy, ǫs, ǫ2s) =
η ∗ K ⊗ ui + ǫ
(η ∗ Kx ⊗ ∂
∂χ+
(ηt ∗ K + η ∗ Kt
)⊗ ∂
∂θ
)ui
+ǫ2
2
[η ∗ Kxx ⊗ ∂2
∂χ2+ 2
(ηt ∗ Kx + η ∗ Kxt
)⊗ ∂2
∂χ∂θ
+(ηtt ∗ K + 2ηt ∗ Kt + η ∗ Ktt
)⊗ ∂2
∂θ2+ 2
(ηt ∗ K + η ∗ Kt
)⊗ ∂
∂τ
]ui
(x, t, χ, θ, τ)
+ O(ǫ3)
≡ M0ui + ǫM1ui + ǫ2M2ui + O(ǫ3). (21)
We denote by Mj the segregated action of operators (identified above) on the different
scales. Hence, the model (3) separates into an infinite sequence of equations (which we
truncate at third order) of the form:
u1 = M0
(γcu1
), (22)
u2 = M0
(γcu2 + γ2u
21
)+ M1
(γcu1
), (23)
u3 = M0
(γcu3 + 2γ2u1u2 + γ3u
31 + δu1
)+ M1
(γcu2 + γ2u
21
)+ M2
(γcu1
). (24)
4.2 Fredholm alternative
One can see that each equation above contains terms of the asymptotic expansion of u
only of the same order or lower. This means that we can start from the first equation
and systematically solve for ui. In fact, if we set L = I − γcM0 = I − γcη ∗ K⊗ the
system (22),(23),(24) has the general form Lun = gn(u1, u2, . . . , un−1) and the right-hand
side gn will always contain known quantities. Thus to construct the solutions of any finite
truncation of the full system describing all the ui it is enough to know the inverse of the
linear operator L.
In terms of L the first equation (22) is Lu1 = 0 and we see that our entire solution space
is a perturbation of the kernel of L. In fact, we have already solved (22) in Section 3 and
know that kerL = span{cos(ωct + kcx), cos(ωct− kcx), sin(ωct + kcx), sin(ωct− kcx)
}, i.e.
15

any solution u1 ∈ kerL can be expressed as a linear combination
u1 = A1(χ, θ, τ) ei(ωct+kcx) +A2(χ, θ, τ) ei(ωct−kcx) + cc, (25)
where A1,2 are arbitrary complex coefficients depending only on the slow space and time
scales. We may now use the Fredholm alternative [44] to consider restrictions on the gn
that will give us equations for the amplitudes A1,2.
Since L acts on the O(1) variables x and t where the solutions ui are periodic we can
restrict our attention to the subspace of bounded functions of period 2π/kc in x and 2π/ωc
in t. Let Λ = [0, 2π/kc]× [0, 2π/ωc] be the periodicity domain and define the inner product
of two periodic functions u(x, t) and v(x, t) to be
<u, v> =kcωc
4π2
∫
Λu(x, t)v(x, t)dxdt, (26)
where the bar denotes complex conjugation. Introducing the functions η∗(t) = η(−t) and
K∗(x, t) = K(x,−t) (η and K reflected around the point t = 0), it can be shown (using
Fourier series) that the adjoint of L is the operator L∗ = I − γcη∗ ∗K∗⊗, with respect to
the inner product (26).
The operator L∗ has the same kernel space as L (since the dispersion relation is invariant
under the change t → −t). From the Fredholm alternative we have for all u ∈ kerLthat <u, gn> = <u, Lun> = <L∗u, un> = 0. Therefore we can derive equations for the
amplitudes simply by calculating the two complex projections
<ei(ωct±kcx), gn> = 0. (27)
To simplify notation we set u± = ei(ωct±kcx). Then, the scalar products (27) expand as
<u±, g2> = γ2ηK<u±, u21> + γcM±
1
(ηK<u±, u1>
)= 0 (28)
and
<u±, g3> = 2γ2ηK<u±, u1u2> + γ3ηK<u±, u31> + δηK<u±, u1>+
M±1
(γcηK<u±, u2> + γ2ηK<u±, u2
1>)
+ γcM±2
(ηK<u±, u1>
)= 0. (29)
Here the Fourier-Laplace transforms (see (8)) η(λ) and K(k, λ) are all evaluated at the
points k = kc and λ = iωc. By M±j we denote the differential operators
M±1 = ∓ ∂
∂ik
∂
∂χ+
∂
∂iω
∂
∂θ, M±
2 =1
2(M±
1 )2 +∂
∂iω
∂
∂τ. (30)
16

Since from (25) u1 is itself a linear combination of the modes u±, most scalar products in
(28) and (29) are easily found: <u+, u1> = A1, <u−, u1> = A2, <u±, u21> = 0, and
<u+, u31> = 3A1
(|A1|2 + 2|A2|2
), <u−, u3
1> = 3A2
(2|A1|2 + |A2|2
). (31)
The first solvability condition (28) reduces to M±1
(ηKA1,2
)= 0, namely
∂(ηK)
∂ik
∂A1,2
∂χ= ±∂(ηK)
∂iω
∂A1,2
∂θ. (32)
The general solutions of these first-order PDEs are
A1(χ, θ, τ) = A1(χ + vg θ, τ) = A1(ξ+, τ), A2(χ, θ, τ) = A2(χ − vg θ, τ) = A2(ξ−, τ),
(33)
where ξ± = χ ± vg θ and vg = ∂ω/∂k. This means that all slow amplitude modulations
A1,2(ξ, τ) will be travelling with an intermediate group speed vg to the left and right
respectively. Notice that the repeated action of M±1 does not result in zero. We have
1
2M±
2
(ηKA1,2
)=
1
2
(∓ ∂
∂ik± υg
∂
∂iω
)2
(ηK) · ∂2A1,2
∂ξ2±
= d∂2A1,2
∂ξ2±
6= 0. (34)
To calculate the last remaining product <u±, u1u2> in (29) we need to find u2 first.
We can do this from the 2nd order equation (23). Since all operators in this equa-
tion are linear, u2 will be some quadratic form of the basis vectors which we write as∑
m,n∈{0,±1,±2} Bm,n ei(mωct+nkcx). To find the unknown Bm,n we substitute this into (23)
and match coefficients to obtain
B00 =γ22(|A1|2 + |A2|2)η(0)K(0, 0)
1 − γcη(0)K(0, 0), (35)
and
Bmn =γ22
||m|−|n||
2 Am+n
2
1 Am−n
2
2 η(imωc)K(nkc, imωc)
1 − γcη(imωc)K(nkc, imωc), (36)
for {m,n = 0,±2}\(m,n) = (0, 0). All other coefficients are zero, except for {Bmn|m,n =
±1} which cannot be determined using this approach because their corresponding modes
are in kerL. The undetermined coefficients B1±1(ξ+, ξ−, τ) are acted on by M1 in (29) in
the following fashion
M±1
(ηKB1±1
)= ∓2
∂(ηK)
∂ik
∂B1±1
∂ξ∓, (37)
17

and this expression will appear in the amplitude equation. By virtue of (35) and (36) the
last remaining scalar products are calculated as
<u+, u1u2> = 2γ2A1
(|A1|2(C00 +
1
2C22) + |A2|2(C00 + C02 + C20)
), (38)
<u−, u1u2> = 2γ2A2
(|A2|2(C00 +
1
2C2−2) + |A1|2(C00 + C0−2 + C20)
), (39)
with
Cmn =η(imωc)K(nkc, imωc)
1 − γcη(imωc)K(nkc, imωc). (40)
We are now in position to write out the third order solvability condition which gives the
amplitude equations.
4.3 The amplitude equations
Substituting in (29) all necessary scalar products (calculated above) we obtain
A1(δγ−1c + b|A1|2 + c|A2|2) − 2
∂(ηK)
∂ik
∂B11
∂ξ−+ γcd
∂2A1
∂ξ2+
+ γc∂(ηK)
∂iω
∂A1
∂τ= 0, (41)
A2(δγ−1c + b|A2|2 + c|A1|2) + 2
∂(ηK)
∂ik
∂B1−1
∂ξ+
+ γcd∂2A2
∂ξ2−
+ γc∂(ηK)
∂iω
∂A2
∂τ= 0, (42)
with
b = γ−1c
(3γ3 + 2γ2
2(2C00 + C22)), c = 2γ−1
c
(3γ3 + 2γ2
2(C00 + C02 + C20)). (43)
To eliminate the unknown coefficients B1±1 we follow [30] and average the two equations in
the ξ− and ξ+ variables, respectively. For example, the only quantities in the first equation
that vary with ξ− are B11 and A2. However the average 〈B11〉 will be independent of ξ−
and thus the derivative term vanishes. After averaging we obtain
∂A1
∂τ= A1(a + b|A1|2 + c〈|A2|2〉) + d
∂2A1
∂ξ2+
,
∂A2
∂τ= A2(a + b|A2|2 + c〈|A1|2〉) + d
∂2A2
∂ξ2−
,
(44)
18

with appropriately modified parameters:
a = −δD,
b = −D(3γ3 + 2γ2
2(2C00 + C22)),
c = −2D(3γ3 + 2γ2
2(C00 + C02 + C20)),
d = −γ2c
2D
(∂
∂ik− vg
∂
∂iω
)2
(ηK),
D = γ−2c
(∂(ηK)
∂iω
)−1
. (45)
The system of equations (44) are the coupled mean-field Ginzburg–Landau equations de-
scribing Turing–Hopf bifurcation with modulation group velocity vg of order one [30,45,46].
As a reminder of the interpretation of terms in the above equations note that η =
η(iωc), K = K(kc, iωc) are the integral transforms (8) of the kernels specifying the model,
δ = (γ1 − γc)/ǫ2 is a measure of the distance from the bifurcation point, and γ1, 2γ2, 6γ3
are the first, second and third derivatives of the nonlinear firing rate function f(u) taken
at the homogeneous solution u. The only parameters that do not appear in the linearised
model are γ2, γ3 and they remain as additional degrees of freedom once we have fixed
a bifurcating solution to study. The dependent variables A1(ξ−, τ) and A2(ξ+, τ) are re-
spectively the right and left-going amplitude modulation wavetrains, moving with group
velocities ±vg. The definition of the averaging 〈A〉 depends on the type of solutions we
are looking for – localised or periodic. Here we will assume A1,2 are periodic with periods
P1,2. In this case
〈|A1,2|2〉 =1
P1,2
∫ P1,2
0|A1,2|2dξ∓. (46)
The form of the spatial cross-interaction term in (44) reflects the fact that since vg = O(1),
as the two wavetrains move across each other they are not able to feel each other’s spatial
structure.
In the next section we show how to use the normal form to predict the formation of
travelling or standing waves beyond the point of Turing instability.
5 Normal form analysis
The coupled complex Ginzburg–Landau equations are one of the most-studied systems
in applied mathematics, with links to nonlinear waves, second-order phase transitions,
19

Rayleigh-Benard convection and superconductivity. They give a normal form for a large
class of bifurcations and nonlinear wave phenomena in spatially extended systems and
exhibit a large variety of solutions. Many of these appear due to the influence of the
boundary conditions. Here our focus is on infinitely-extended systems. First let us neglect
the diffusive terms in (44), which allows us to determine the conditions for the selection
of travelling vs standing wave behaviour beyond a dynamic Turing instability.
5.1 Travelling wave versus standing wave selection
The space-independent reduction of (44) takes the form
A′1 = A1(a + b|A1|2 + c|A2|2),
A′2 = A2(a + b|A2|2 + c|A1|2). (47)
Such a reduction is valid in the limit of fast diffusion, and is particularly relevant to the
interpretation of numerical experiments on a periodic domain (with fundamental period
an integer multiple of 2π/kc). Stationary states of this reduced system can be identified
with the homogeneous steady state, travelling wave and standing wave solution of the
neural field model (3). The travelling wave solution corresponding to A2 = 0, has a speed
(ωc + ǫ2e1)/kc and takes the form
u(x, t) = 2
√−ar
br
cos((ωc + ǫ2e1)t − kcx
), (48)
with small frequency change e1 = ai − arbi/br. The subscripts r and i denote real and
imaginary parts respectively. The standing wave, A1 = A2 is described by
u(x, t) = 4
√−ar
br + cr
cos kcx cos((ωc + ǫ2e2)t
), (49)
with e2 = ai − ar(bi + ci)/(br + cr). The linear stability analysis of the stationary states
leads to the following conditions for selection between travelling wave (TW) or standing
wave (SW):
ar > 0, br < 0, TW exists (supercritical) and for br − cr > 0 it is stable,
ar > 0, br + cr < 0, SW exists (supercritical) and for br − cr < 0 it is stable.
In the parameter regions where these stationary states of the ODE system (47) do not
exist, the amplitude of the bifurcating solution remains finite if the nonlinearity f is
20

TW (stable)
SW (unstable)0 0
SW
SW sta
ble
TW
sta
ble
γ2
γ3
0 0
TW
γ2
γ3
TW-generator TW/SW-generator
br= cr
Fig. 6. The two possible configurations of the parameter space (γ2, γ3) for standing vs travel-
ling wave selection. γ2 and γ3 are the second and third coefficients respectively of the Taylor
expansion of the nonlinearity around the homogeneous steady state. Left: This configuration is
what we term a TW–generator and occurs for f > g. Right: The configuration corresponding
to a TW/SW–generator (f < g). Lighter grey denotes the existence of TWs and the darker of
SWs. The thick line denotes where br = cr. Where both TWs and SWs exist it forms a selection
border in the sense that on one side of it TWs are stable, and on the other SWs are stable.
a bounded function. However, the bifurcation is subcritical and higher-order terms are
needed in the normal form to give us information about the amplitudes. We will not
concern ourselves with these regions. We now translate the conditions above into the
language of our neural field model. Since the only free variables are those describing the
nonlinearity f(u), i.e. γ2 and γ3, this motivates us to write out ar, br, cr, using (45), as
ar = δe,
br = 3γ3e + 2γ22 f ,
cr = 6γ3e + 4γ22 g,
withe = Re D, f = Re
(D(2C00 + C22)
),
g = Re(D(C00 + C02 + C20)
).
(50)
The expressions e, f , g involve only the kernel transforms and the first derivative of the
nonlinearity f which is fixed by the condition defining a Turing instability.
By simply examining the selection conditions it is possible to make some general state-
ments about the the geometry of TW– and SW–selection parameter regions. However, for
the specific type of models (3) we are concerned with, one can immediately see from the
form of (50) that all regions in the (γ2, γ3) space will have parabolic borders with a tip
at the origin where γ2 = γ3 = 0, and that they may only differ in their curvature (second
21

derivative). The only two possible qualitatively different configurations of parameter space
are shown in Fig. 6. They are separated by the condition f = g. For f > g, there are
regions of parameter space that will support stable travelling waves. However, in this case
no stable SWs are possible. We call this configuration a TW–generator. For f < g, there
are also regions of parameter space where standing waves are stable and TWs exist but
are unstable. We call this configuration the TW/SW–generator. In a TW–generator SWs
exist everywhere where TWs exist. In a TW/SW–generator TWs exist everywhere where
SWs exist. In the next section we use this machinery to explore TW vs SW selection in
models with a cubic and sigmoidal firing rate nonlinearity.
5.1.1 Cubic and sigmoidal firing rate function
The general case of independent γ2 and γ3 can be emulated by choosing a cubic nonlinear-
ity f(u) = γ1u+γ2u2+γ3u
3. Note that in this case there is no truncation of the amplitude
equations and it turns out that the amplitude equation predictions match very closely the
numerical results even far beyond the bifurcation point. Since the firing rate is now un-
bounded, patterns outside the existence regions grow unbounded beyond bifurcation from
the homogeneous steady state. Choosing a particular function f in effect specifies a locally
homeomorphic mapping, Γ, of the (γ2, γ3)-plane to a new space of parameters. For the sig-
moidal function (2) this space is in fact lower-dimensional. By putting α = exp(β(u−h))
we have
f(u) =1
1 + α, f ′ =
βα
(1 + α)2, f ′′(u) =
β2α(α − 1)
(1 + α)3, f ′′′(u) =
β3α(α2 − 4α + 1)
(1 + α)4. (51)
At the bifurcation point the transcendental equation γc = f ′(u) reduces the number of
independent parameters by one. For example we may use this equation to write h = h(β)
and then express both γ2 = f ′′(u)/2 and γ3 = f ′′′(u)/6 as functions of just the gain β. The
relationship between h and β (for a fixed γc = 1) is plotted in Fig. 7, right. The parameter
portrait on the two branches is identical because the axis of symmetry of (γ2, γ3)–space
maps onto the middle of the graph h = 0. Note that for β < 4γc, there is no corresponding
value of h which solves the condition to be at the bifurcation point γc.
5.2 Benjamin–Feir instability
We have determined some aspects of the nonlinear behaviour of the full system from
the reduced amplitude equations (47). Basically, the stable solution of the system (47) is
22

composed of one (TW) or two (SW) periodic wavetrains moving with speed determined
by the linear instability. However, the diffusion term present in the full space-dependent
amplitude equations (44) alters somewhat the nature of solutions. The generic instability
associated with such diffusion, in an infinite 1D system, is an instability to long-wave
sideband perturbations due to the influence of nearby excited modes on the primary
mode. This is the so-called Benjamin–Feir–Eckhaus instability. We will describe it briefly
here, for more detail see for example [35].
Let us consider a travelling wave having a wavenumber k = kc +ǫq, where q ∈ (−√
δ,√
δ),
so that k describes the unstable set of modes for γ1 = γc + ǫ2δ > γc. The solution
to the spatially extended system is A = r1eie1τ+iqξ, e1 = ai + bir
2 − diq2. By adding
small perturbations to both the magnitude and phase of A we find the condition for
stability of the q-mode: br < 0, brdr + bidi + 2q2d2r|b|2/(r2
1b2) < 0. One can see that the
relation between the self-coupling and the diffusion constants b and d determines the finite
width of a set of modes q with centre the primary mode kc, which are stable to sideband
perturbations. This is defined by the condition
q2 <brdr + bidi
2d2r|b|2 + brdr(brdr + bidi)
arbr. (52)
A solution with wavenumber outside this band will break up in favour of a wave with
wavenumber from inside the stable band. In Fig. 7, left, we show the Fourier transform
of a wave solution to the model from Section 3.1 undergoing a Benjamin–Feir–Eckhaus
instability. If the condition
brdr + bidi > 0 (53)
holds, there is no stable wavenumber and several different regimes of spatiotemporal chaos
can develop depending on parameters as described in [47]. This is commonly referred to as
the Benjamin–Feir instability. For the mean-field Ginzburg–Landau equations it is known
that if the control parameter is very close to the bifurcation value, the condition (53) also
determines the point of destabilisation of the standing wave solution [30]. Note, however,
that the validity of this result for SWs is limited by more complicated re-stabilisation
boundaries at slightly larger values of γ1 [46]. We will not consider this here. An example
of a Benjamin–Feir instability will be presented later in Section 6 for a model with mexican
hat connectivity and spike frequency adaptation (Fig. 11).
23

5.3 Examples revisited
We apply the theory developed so far to determine the regions of TW–SW selection for
the model with axonal delays we looked at in Section 3.1. Again, we will keep α = 1 and
work with v and the nonlinear parameters β (neuronal gain) and h (threshold). Using
the remarks made in Section 5.1.1 we plot the TW–SW regions in terms of β only (see
Fig. 7, center). We can see that for all v only travelling waves are stable. Note that for
β under the dashed line β = 4γc we cannot be at the bifurcation point for any h (see
Fig. 7, right) and the amplitude equations in that region are not valid. For the range of
speeds v ≈ 0.15 to v ≈ 0.65 the analysis is also not relevant because another eigenvalue
becomes first linearly unstable through a Hopf bifurcation (see Fig. 3). A Benjamin–Feir
instability is not observable in this model because the stability boundary coincides almost
k
t
0
max û
υ
β
1 2 3 4 50
20
40
60
80
100
120
h
û(k,t)
1 2 3 40 -0.02 0.020
20
40
60
80
100
βγc
Ho
mo
gen
eous
osc
illa
tio
ns
SW
TW
500
Fig. 7. Left: An example of a Benjamin–Feir–Eckhaus instability in the model of Section 3.1.
Parameters are the same as for Fig. 3a with v = 1 and γ1 = γc + 2.6. The primary unstable
wavenumber when γ1 = γc is kc = 2. Shown is the Fourier transform, u(k, t), of u(x, t) illustrating
the active wavenumbers. Initial wave-data with k = 2.64 can be seen to transition to a pattern
with wavenumber k = 1.98 (the periodic domain size is 19.04). Center: TW–SW selection for the
model with axonal delay and inverted wizard hat connectivity. The weakly nonlinear analysis
is only valid for β above the dashed line and a corresponding ±h (obtained from the figure on
the right). Grey regions denote existence of TWs (light) and SWs (light + dark). The thick
line is where br = cr. The domain of Benjamin–Feir stability coincides almost exactly with the
TW existence region and so we have not plotted it. Right: The dependence of the gain β on the
threshold h for the sigmoidal function (2) as determined by the condition to be at the bifurcation
point γ1 = γc.
24

υ
φ
Homogeneous oscillations
TW/SW-generator
0 0.2 0.4 0.6 0.8 1 1.2
1
2
3
4
5
TW
-gen
erat
or
TWSW
BjF stable
0 0.2 0.4 0.6 0.8 1 1.20
100
200
300
400
β
φ
Fig. 8. Left: Two-parameter continuation of the border condition f = g that separates TW– and
TW/SW–generators for the model with axo-dendritic delays and z0 = α = τ = D = 1. For a
point (φ, v) chosen from within the TW–generator (TW/SW–generator) the (γ2, γ3) parameter
space has the form of Fig. 6 left (right). Right: The regions of existence of TWs (light grey) and
SWs (both dark and light grey) and their Benjamin–Feir stability (shaded) for the model with
correlated dendritic delays (no axonal delay) and sigmoidal firing rate. TWs are always stable.
exactly with that of travelling waves.
Similarly if we follow the critical curve of the model with dendritic delays with a fixed
synaptic site z0 (6) (Fig. 5, left) we find that the only stable solutions for every z0 are
travelling waves. The case of correlated synapses is more interesting and we consider first
a cubic nonlinearity. As we vary the synaptic contact parameter φ we find that there is a
value at which behaviour switches between the TW– and TW/SW–generator (i.e. when
f = g). We can track this point in a second parameter, for example the axonal conduction
velocity v. We plot this diagram on the left of Fig. 8. Consistent with other models we
obtain synchronised homogeneous oscillations for large delay and TWs for small delays.
Intermediate between these two extremes we find a TW/SW–generator. However, here
the sizes of regions of stable SWs are very small. A sigmoidal nonlinearity stretches the
parameter space in a way which makes stable SWs practically unobtainable for this model
(see Fig. 8, right).
25

6 Spike frequency adaptation
In real cortical tissues there is an abundance of metabolic processes whose combined effect
is to modulate neuronal response. It is convenient to think of these processes in terms of
local feedback mechanisms that modulate synaptic currents. Here we consider a simple
model of so-called spike frequency adaptation (SFA), previously discussed in [42]:
u = η ∗ [K ⊗ f ◦ u − γaa] , ∂ta = −a +∫ ∞
−∞dy wa(x − y)fa(u(y, t)), (54)
where γa > 0 is the strength of coupling to the adaptive field a and wa(x) = exp(−|x|/σ)/2σ
describes the spread of negative feedback. By solving for a with the Green’s function
ηa(t) = e−t Θ(t) we can reduce the model to a single equation of the form
u = η ∗ (K ⊗ f + Ka ⊗ fa) ◦ u, (55)
where Ka(x, t) = −ηa(t)wa(x) and the coefficient γa has been incorporated into the non-
linearity fa. Using this notation it is apparent that both our linear and weakly nonlinear
analysis can be readily extended. The dispersion relation for a model with SFA can be
written in the form E1(k, λ) = 1 with Ei(k, λ) = η(λ)(γiK(k, λ) + γai
Ka(k, λ))
where
γan= f (n)
a (u). Then, the coefficients of the mean-field Ginzburg–Landau equation are
calculated as
a = −δD,
b = −D(3E11
3 + 2E112 (2C00 + C22)
),
c = −2D(3E11
3 + 2E112 (C00 + C02 + C20)
),
d = −1
2D
(∂
∂ik− vg
∂
∂iω
)2
E11c
D =
(∂E11
c
∂iω
)−1
, Cmn =Emn
2
1 − Emnc
, vg =∂ω
∂k, (56)
with Emni = Ei(nkc, imωc), and all quantities above evaluated at the critical point where
(k, ω) = (kc, ωc) and E1 = Ec.
Consider the model with axonal delay given by K(x, t) = (1− |x|) e−|x| δ(t− |x|/v) in the
context of linear adaptation (fa(u) = γau). The linear instability portrait with respect
to adaptation strength γa is plotted in Fig. 9, left for v = 1 and σ = 0 (representing
local feedback). The case with σ 6= 0 (non-local feedback) is qualitatively similar. With
increasing γa the main effect, on all critical curves (such as those seen in Fig. 3), is to move
26

-4
-2
0
2
4
6
8
0 2 4 6 8 10
kc=0, ω
c ≠0
kc ≠0, ω
c ≠0
Unst
able
reg
ime
Rest state
w0 γ1
γa
kc=0, ω
c≠0
kc ≠0, ω
c =0
k c≠0, ω c
≠0
Hopf
TWSW
TW stableSW stable
β
5.5 6 6.5 7 7.5 8
12
10
8
6
4
2
0 γa
Dynamic Turing
Dynamic
Turing
StaticTuring
γa= γa
c
Fig. 9. Left: The linear instabilities of the model with axonal delay v = 1 and localised (σ = 0)
linear adaptation with strength γa. Right: TW–SW selection along the Turing–Hopf instability
curve for standard wizard hat on the left. Here we have a TW/SW–generator and for visibility
shades have been chosen differently from previous plots. SWs exist in the dark grey area only.
TWs exist in both the light and dark grey areas. The thick line separates stable TWs from
stable SWs. Both TWs and SWs are Benjamin–Feir stable.
them toward γ1 = 0. For γa larger than some critical value γca the homogeneous steady
state becomes unstable. In this case the majority of wavemodes are excited and solutions
grow to infinity. For w0 < 0 (and the physically sensible choice γ1 > 0) we see that a
dynamic instability can occur for sufficiently large γa < γca. This statement is true for all
v. Hence, dynamic instabilities are possible in a model with short range excitation and
long range inhibition provided there is sufficiently strong adaptive feedback. Indeed, this
observation has previously been made by Hansel and Sompolinsky [48]. In fact, Curtu and
Ermentrout [29] discovered homogenous oscillations, travelling waves and standing waves
in the neighbourhood of a Takens–Bogdanov (TB) bifurcation in a model with Mexican
hat connectivity and feedback lacking space-dependent delays (v−1 = 0). The dependence
of this TB point on v and γa in a model with standard wizard hat connectivity is shown
in Fig. 10. It first appears for v ≈ 6.27 at γa ≈ 2.51. In contrast to previous models we
have studied, the regions of stable SWs are large for the general cubic case and exist even
for the sigmoidal firing rate (see Fig. 9 right). Another new feature in the presence of SFA
is the appearance of parameter regimes at large v for which TWs and SWs are Benjamin–
Feir unstable. Solutions of all models without SFA that we studied were verified to be
Benjamin–Feir stable. An example of such instability of SW in a model with SFA is shown
27

0 1 2 3 4 5 6 7 80
4
8
12
16
20
Tak
ens-
Bogdan
ov
Homogeneous oscillations
Dynamic Turing
StaticTuring
γa
Dynamic Turing
TW-generator
TW/SW-generator
0 1 2 3 4 5
1
2
3
4
5
6
7
υ
TW/SW-
generator
TW-generator
Hom
ogen
eous
osc
illa
tions
γaυ
TW/SW-generator
Fig. 10. Left: Organisation of emergent dynamics in a model with axonal delays and
spike-frequency adaptation with standard wizard hat connectivity (w0 < 0). Here σ = 0,
α = αa = 1. Right: The dynamics of the model with axonal delay and nonlinear adaptation
with strength γa and σ = 0.
in Fig. 11. However, we were not able to observe chaotic solutions as one might expect
from the properties of the system’s normal form. The questionas to why the transition
settles to modulated ordered solutions remains open.
Let us briefly consider an example of nonlinear adaptation with the choice fa = γaf
in (55). In the case of purely local feedback (σ = 0) the linear instability portrait for
the model of Section 3.1 does not change qualitatively when γa is increased from zero,
although all instability curves are moved towards zero for both w0 > 0 and w0 < 0. Unlike
the linear adaptation model they do not hit γ1 = 0 but instead tend assymptotically to
it. Thus there is no “unstable regime” where all modes are excited. A region of TW/SW–
generator appears for medium speeds, shown in Fig. 10, though the SW bands in (γ2, γ3)
space are very small. However, they significantly widen for nonlocal feedback and can also
be observed for the case of sigmoidal firing rates.
7 Discussion
In this paper we have studied pattern formation in a broad class of neural field models.
These models provide minimal descriptions of neural tissue with biological features that
include synaptic and dendritic processing, the effects of axonal delays, and spike frequency
adaptation. Importantly we have written them using the language of integral equations
28

0 max ûû(k,t)
u(x,t) max u0
30 k0 54.81600
2000
2000
2400x
t
300 54.8
30 k0 54.8x
t
200
800
b
ca
Fig. 11. A Benjamin–Feir instability of standing waves in the model with linear SFA with a
cubic nonlinearity. Parameters: v = 8, γa = 2.66, γ1 = γc + 0.1, γ2 = −1.3, γ3 = −0.4. The ini-
tial condition favours a standing wave with the primary unstable wavenumber kc = 1.144, but
wavenumbers in its neighbourhood start to grow (a). After some time new nonlinear stability
conditions come into play which, depending on the initial condition (respectively k = 1.0395 and
k = kc), might let only a single wavenumber survive (b) or stabilise a more complicated config-
uration (c). On the Fourier space plots one can also see the appearance of a spatial resonance.
Here, wavenumbers which are multiples of the dominant ones also become partially excited.
and spatio-temporal kernels. By pursuing a systematic multiple scales approach for deriv-
ing amplitude equations in an integral framework we have been able to recover a number
of known results about pattern formation in neural fields, and more importantly been
able to treat the biologically important case of space-dependent delays for the first time.
These delays arise naturally in models with axons and dendrites and are treated from a
mathematical perspective by choosing an appropriate spatio-temporal kernel K(x, t) for
the integral model. In fact because our approach does not depend upon detailed proper-
ties of K(x, t) the techniques we have developed can also cope with time varying synaptic
connections, such as would be the case if a network were undergoing some form of learning.
The derivation of the appropriate amplitude equations for group velocity of O(1) has
allowed us to treat the selection problem for standing vs travelling waves in models with
both axonal [18] and dendritic delays [17], and to also recover and extend the original work
of Curtu and Ermentrout [29] on linear spike frequency adaptation. Although the latter
authors have used similar methods to ours to find instances of standing waves, one point
29

worth making for all the models studied in this paper is that the windows of parameter
space that support stable standing waves are, in fact, very small. Our analysis has enabled
us to first delimit such regions and second to consider how they may be maximized. For
example in the case of nonlinear spike frequency adaptation we find that increasing the
spatial extent of modulating currents is one such mechanism for promoting the robustness
of stable standing waves under parameter variation.
A number of extensions of the work in this paper readily suggest themselves, including
i) the study of two-population models [1], ii) the effects of heterogeneity [49,28], iii) the
treatment of dynamic thresholds [50], iv) the effects of distributed axonal speeds [51] and
v) the extension to two spatial dimensions. These are topics of ongoing study and will be
reported on elsewhere.
Acknowledgements
SC would like to acknowledge ongoing support from the EPSRC through the award of an
Advanced Research Fellowship, Grant No. GR/R76219.
References
[1] H R Wilson and J D Cowan. Excitatory and inhibitory interactions in localized populations
of model neurons. Biophysical Journal, 12:1–24, 1972.
[2] D Golomb and Y Amitai. Propagating neuronal discharges in neocortical slices:
Computational and experimental study. Journal of Neurophysiology, 78:1199–1211, 1997.
[3] J Y Wu, L Guan, and Y Tsau. Propagating activation during oscillations and evoked
responses in neocortical slices. Journal of Neuroscience, 19:5005–5015, 1999.
[4] R Miles, R D Traub, and R K S Wong. Spread of synchronous firing in longitudinal slices
from the CA3 region of Hippocampus. Journal of Neurophysiology, 60:1481–1496, 1995.
[5] X Huang, W C Troy, Q Yang, H Ma, C R Laing, S J Schiff, and J Wu. Spiral waves in
disinhibited mammalian neocortex. The Journal of Neuroscience, 24:9897–9902, 2004.
[6] B W Connors and Y Amitai. Generation of epileptiform discharges by local circuits in
neocortex. In P A Schwartzkroin, editor, Epilepsy: Models, Mechanisms and Concepts,
pages 388–424. Cambridge University Press, 1993.
30

[7] G B Ermentrout and J D Cowan. A mathematical theory of visual hallucination patterns.
Biological Cybernetics, 34:137–150, 1979.
[8] P Tass. Cortical pattern formation during visual hallucinations. Journal of Biological
Physics, 21:177–210, 1995.
[9] P C Bressloff and J D Cowan. Spontaneous pattern formation in primary visual cortex. In
A. Champneys S. J. Hogan and B. Krauskopf, editors, Nonlinear dynamics: where do we go
from here? Institute of Physics, Bristol, 2002.
[10] S Amari. Dynamics of pattern formation in lateral-inhibition type neural fields. Biological
Cybernetics, 27:77–87, 1977.
[11] K Kishimoto and S Amari. Existence and stability of local excitations in homogeneous
neural fields. Journal of Mathematical Biology, 7:303–318, 1979.
[12] G B Ermentrout and J B McLeod. Existence and uniqueness of travelling waves for a neural
network. Proceedings of the Royal Society of Edinburgh, 123A:461–478, 1993.
[13] D J Pinto and G B Ermentrout. Spatially structured activity in synaptically coupled
neuronal networks: I. Travelling fronts and pulses. SIAM Journal on Applied Mathematics,
62:206–225, 2001.
[14] S Coombes. Waves, bumps and patterns in neural field theories. Biological Cybernetics,
93:91–108, 2005.
[15] P L Nunez. The brain wave equation: a model for the EEG. Mathematical Biosciences,
21:279–297, 1974.
[16] V K Jirsa and H Haken. A derivation of a macroscopic field theory of the brain from the
quasi-microscopic neural dynamics. Physica D, 99:503–526, 1997.
[17] P C Bressloff. New mechanism for neural pattern formation. Physical Review Letters,
76:4644–4647, 1996.
[18] A Hutt, M Bestehorn, and T Wennekers. Pattern formation in intracortical neuronal fields.
Network, 14:351–368, 2003.
[19] B A McGuire, C D Gilbert, P K Rivlin, and T N Wiesel. Targets of horizontal connections
in macaque primary visual cortex. Journal of Comparative Neurology, 305:370–392, 1991.
[20] P-A Salin and J Bullier. Corticocortical connections in the visual system: structure and
function. Physiological Reviews, 75:107–154, 1995.
31

[21] C D Gilbert, A Das, M Ito, M Kapadia, and G Westheimer. Spatial integration and cortical
dynamics. Journal of Comparative Neurology, 93:615–622, 1996.
[22] A Hutt. Local excitation-lateral inhibition interaction yields wave instabilities in spatial
systems involving finite propagation delay. arXiv:nlin/0610037, 2006.
[23] A Roxin, N Brunel, and D Hansel. Role of delays in shaping spatiotemporal dynamics of
neuronal activity in large networks. Physical Review Letters, 28:357–376, 2005.
[24] P C Fife. Mathematical Aspects of Reacting and Diffusing Systems. Lecture Notes in
Biomathematics. Springer, Berlin, 1979.
[25] F H Busse. Nonlinear properties of thermal convection. Rep. Prog. Phys., 41:1929–1967,
1978.
[26] B G Ermentrout. Stable small-amplitude solutions in reaction-diffusion systems. Quart.
Appl. Math., 39:61–86, 1981.
[27] B G Ermentrout and J Cowan. Secondary bifurcation in neuronal nets. SIAM Journal on
Applied Mathematics, 39:323–340, 1980.
[28] P C Bressloff. Spatially periodic modulation of cortical patterns by long-range horizontal
connections. Physica D, 185:131–157, 2003.
[29] R Curtu and B Ermentrout. Pattern formation in a network of excitatory and inhibitory
cells with adaptation. SIAM Journal on Applied Dynamical Systems, 3:191–231, 2004.
[30] E Knobloch and J de Luca. Amplitude equations for travelling wave convection. Journal of
Nonlinearity, 3:975–980, 1990.
[31] H R Wilson and J D Cowan. A mathematical theory of the functional dynamics of cortical
and thalamic nervous tissue. Kybernetik, 13:55–80, 1973.
[32] V K Jirsa and H Haken. Field theory of electromagnetic brain activity. Physical Review
Letters, 77:960–963, 1996.
[33] P C Bressloff and S Coombes. Physics of the extended neuron. International Journal of
Modern Physics B, 11:2343–2392, 1997.
[34] G. M. Shepherd, editor. The Synaptic Organization of the Brain. Oxford University Press,
1990.
[35] R Hoyle. Pattern formation: An introduction to methods. Cambridge University Press, 2006.
32

[36] A C Newell. The dynamics and analysis of patterns. In H F Nijhout, L Nadel, and D L
Stein, editors, Pattern formation in the physical and biological sciences, pages 201–268.
Addison-Wesley, Santa Fe Institute, 1997.
[37] M C Cross and P C Hohenberg. Pattern formation outside of equilibrium. Reviews of
Modern Physics, 65(3):851–1112, 1935.
[38] D Walgraef. Spatio-temporal pattern formation. Springer-Verlag, 1997.
[39] G B Ermentrout. Asymptotic behavior of stationary homogeneous neuronal nets. In S Amari
and M A Arbib, editors, Competition and cooperation in neural nets, pages 57–70. Springer,
1982.
[40] P C Bressloff. Les Houches Lectures in Neurophysics, chapter Pattern formation in visual
cortex, pages 477–574. Elsevier.
[41] N A Venkov. Dynamics of neural field models. PhD thesis, School of Mathematical Sciences,
University of Nottingham. In preparation.
[42] S Coombes, G J Lord, and M R Owen. Waves and bumps in neuronal networks with
axo-dendritic synaptic interactions. Physica D, 178:219–241, 2003.
[43] A Hutt and F M Atay. Analysis of nonlocal neural fields for both general and gamma-
distributed connectivities. Physica D, 203:30–54, 2005.
[44] G Helmberg. Introduction to Spectral theory in Hilbert space. North-Holland Publishing
Company, 1969.
[45] R D Pierce and C E Wayne. On the validity of mean-field amplitude equations for
counterpropagating wavetrains. Journal of Nonlinearity, 8:769–779, 1995.
[46] H Riecke and L Kramer. The stability of standing waves with small group velocity. Physica
D, 137:124–142, 2000.
[47] B I Shraiman, A Pumir, W van Saarloos, P C Hohenberg, H Chate, and M. Holen.
Spatiotemporal chaos in the one-dimensional complex Ginzburg-Landau equation. Physica
D, 57(3-4):241–248, 1992.
[48] D Hansel and H Sompolinsky. Methods in Neuronal Modeling, From Ions to Networks (2nd
Edition), chapter Modeling Feature Selectivity in Local Cortical Circuits, pages 499–567.
MIT Press, 1998.
[49] V K Jirsa and J A S Kelso. Spatiotemporal pattern formation in neural systems with
heterogeneous connection topologies. Physical Review E, 62:8462–8465, 2000.
33

[50] S Coombes and M R Owen. Bumps, breathers, and waves in a neural network with spike
frequency adaptation. Physical Review Letters, 94:148102, 2005.
[51] A Hutt and F M Atay. Effects of distributed transmission speeds on propagating activity
in neural populations. Physical Review E, 73:021906, 2006.
34
Related Documents