Dortmunder Regelungstechnische Kolloquien, 28. Januar 2010 Lernen bildbasierter Roboterverhalten durch Demonstration Krishna Kumar Narayanan Luis Felipe Posada Frank Hoffmann und Torsten Univ.-Prof. Dr.-Ing. Prof. h.c. Torsten Bertram Lehrstuhl für Regelungssystemtechnik Krishna Kumar Narayanan , Luis Felipe Posada, Frank Hoffmann und Torsten Bertram

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Dortmunder Regelungstechnische Kolloquien, 28. Januar 2010
Lernen bildbasierter Roboterverhalten durch DemonstrationKrishna Kumar Narayanan Luis Felipe Posada Frank Hoffmann und Torsten
Univ.-Prof. Dr.-Ing. Prof. h.c. Torsten BertramLehrstuhl für Regelungssystemtechnik
Krishna Kumar Narayanan, Luis Felipe Posada, Frank Hoffmann und Torsten Bertram

Motivation

Motivation
WAHR-NEHMUNG
LERNEN SITUATIONIMITIEREN LERNEN ERKENNENIMITIEREN
HANDLUNGS-AUSWAHL

Gliederung
Lernen durch DemonstrationLernen durch Demonstration
SegmentierungsalgorithmusSegmentierungsalgorithmus
Visuelle Merkmale
Trainieren, Validieren und Lernen
Experimentelle Ergebnisse

Lernen durch Demonstration
Lernphase
Demonstration Verhaltenverallgemeinern
D
Ausführungsphase
Roboterz´
g p
U bUmgeb-ung a´
B.D. Argall, et al., A survey of robot learning from demonstration, Robotics and Autonomous Systems (2009), doi: 10.1016/j.robot.2008.10.024

Demonstration und Aufzeichnung der Handlung
MenschenMenschen
Teach – in / Joystick Kinästhetik Interne/externe Sensorik
Maschine
J M P l t l P ti b h i l i i C B d R i f i i b d 4 l d b tJ.M. Peula , et al, Pure reactive behavior learning using Case Based Reasoning for a vision based 4-legged robot, Robotics and Autonomous Systems (2009).
S. Calinon, et al, What is the Teacher's Role in Robot Programming by Demonstration? - Toward Benchmarks for Improved Learning, Psychological Benchmarks in Human-Robot Interaction (2007)

Lernen eines Verhaltens
L f h
Direkte Generalisierung: Wahrnehmung-Handlungspaare
Lernverfahren
Lernen der Übergangs- und Belohnungsfunktionen und g g g
LernverfahrenDynamische
Lernverfahren g gProgrammierung
Planung und Lernen von Handlungssequenzen
Lernverfahren PlanerRandbedingungen
B.D. Argall, et al., A survey of robot learning from demonstration, Robotics and Autonomous Systems (2009), doi: 10.1016/j.robot.2008.10.024

Korrespondenz
Embodiment Mapping
USichtfeld
TeleoperationLehrer mit
eigenerSensorik
Map
ping
mge
Sichtfeld
Shadowing Externe BeobachtungR
ecor
d Mb
un R
Demonstration Imitation
g
Vorführung aufgezeichneteRecord EmbodimentVorführungLehrer
aufgezeichnete Vorführung
Record Mapping LernerEmbodiment
Mapping
1 B D Argall et al A survey of robot learning from demonstration Robotics and Autonomous Systems (2009) doi: 10 1016/j robot 2008 10 0241. B.D. Argall, et al., A survey of robot learning from demonstration, Robotics and Autonomous Systems (2009), doi: 10.1016/j.robot.2008.10.024
3. http://marsrover.nasa.gov/2. S. Calinon, et al, What is the Teacher's Role in Robot Programming by Demonstration? - Toward Benchmarks for Improved Learning, Psychological Benchmarks in Human-Robot Interaction (2007)

Architektur für Lernen durch ImitationVERHALTENSDEMONSTRATION SONARVERHALTENSDEMONSTRATION SONAR
ufna
hme Kameras
• 3D PMD• Monokular
entie
rung Algorithmen
• RANSAC• Region Growing xt
rakt
ion Visuelle Merkmale
• 27 von Frontal• 25 vom
P
Merkmalsselektion
E
Au • Omnidirektional
Seg
me • Watershed
Mer
kmal
se Panorama• 1 Roboter-
zentrisch• Krümmung
Forward Chaining
Beste
OFF
LIN
VERHALTENSIMITATION KAMERA NLI
NE
Merkmale
nngVERHALTENSIMITATION KAMERA
Han
dlun
g ON
ufna
hme Kameras
• 3D PMD• Monokular nt
ieru
ng Algorithmen• RANSAC• Region Growing xt
rakt
ion Visuelle Merkmale
• 53 Merkmale• Beste Merkmale
Test
en
Valid
ieru
H Au • Omnidirektional
Seg
me • Watershed
• Segmentierungsvalidierung
Mer
kmal
sex
• Ausgang Clustern Lernen
MKrümmung
Trainings-instanzen
Anfrage

Gliederung
Lernen durch DemonstrationLernen durch Demonstration
SegmentierungsalgorithmusSegmentierungsalgorithmus
Visuelle Merkmale
Trainieren, Validieren und Lernen
Experimentelle Ergebnisse

Kamerasystem
PMD O3D KameraAuflösung 64 x 48 Pixel
CCD KameraAuflösung 640 x 480 Pixel
Omnidirektionale Kamera360° d i ht360° rundumsicht

Geometrische Segmentierung in 3D
orm
atio
ner
ung0.65
0.7
0.6
entra
nsfo
egm
entie
0.85
0.75
0.8
oord
inat
eE
bene
nse
Abstandsbild [m]
sisc
he K
oA
NS
AC
EK
arte
sR
A
CCD BildCCD BildFlur Wand 1 Wand 2Hindernis
Klassifikation von Ebenen Normalenvektor
Flä h Fläche

2D Segmentierung Region Growing
• Flur• Wand• Hindernis
Marker basiertSegmentierung
Region growing
WatershedFlur seeds
Region growing
WandFlur
3D Segmentierung Transformiert inFrontansicht
Watershed
2D Segmentierungs-algorithmen
0 0 5 6 70 0 5 6 7 0 0 5 6 7
1 1 5 8 7
0 1 6 7 7
1 1 5 8 7
0 6 71 7
1 1 5 8 7
0 6 71 7
2 0 7 6 6
0 1 5 6 5
2 0 7 6 6
0 1 5 6 5
2 0 7 6 6
0 1 5 6 5
HomogenitätskriteriumMarker setzen gdefinieren

2D Segmentierung Watershed
• Flur• Wand• Hindernis
Marker basiertSegmentierung
Region growing
WatershedFlur seeds
Region growing
WandFlur Watershed
3D Segmentierung Transformiert inFrontansicht
Watershed
2D Segmentierungs-algorithmen
Watershed
0
igke
itH
elli
Beispiel BildprofilErster Pixel MarkiertZweiter Pixel Markiert
255 Abstand

2D Segmentierung
• Flur• Wand• Hindernis
Marker basiertSegmentierung
Region growing
WatershedFlur seedsWand
Flur Watershed
3D Segmentierung Transformiert inFrontansicht
Watershed
2D Segmentierungs-algorithmen
Watershed
Boden Wand Hindernis
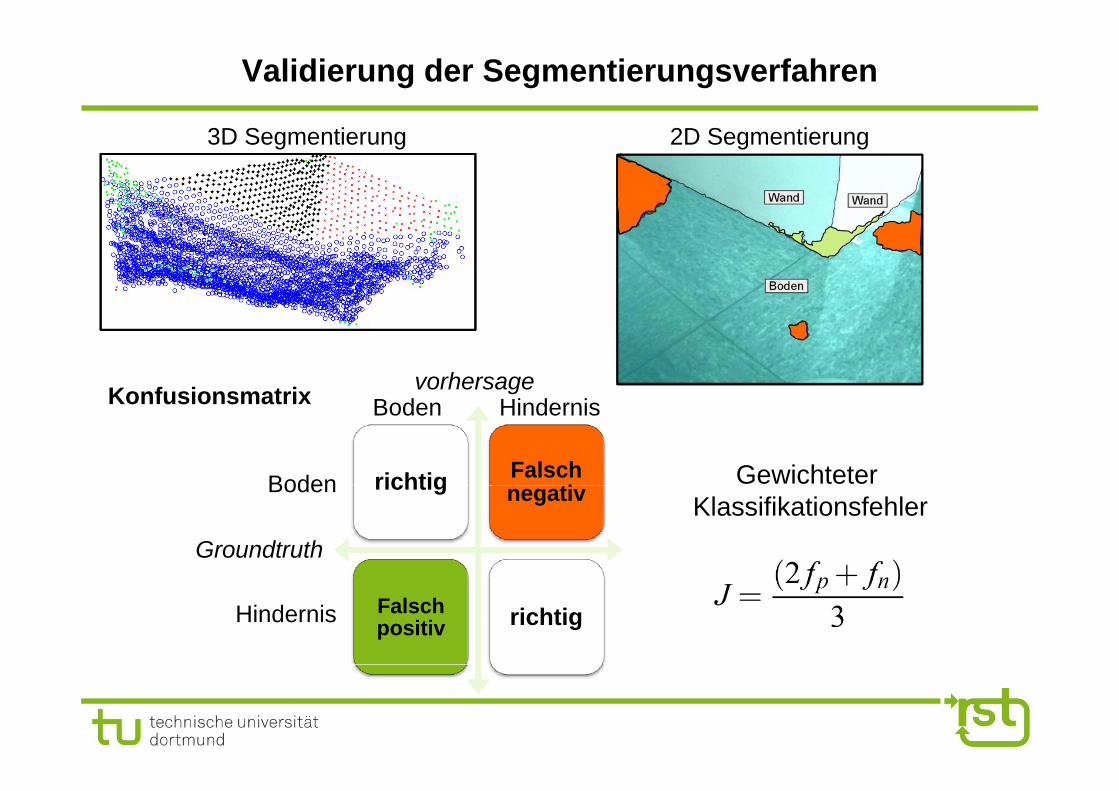
Validierung der Segmentierungsverfahren
3D Segmentierung 2D Segmentierung
vorhersageKonfusionsmatrix
Gewichteterrichtig Falsch tiBoden
Boden HindernisKonfusionsmatrix
Klassifikationsfehlerrichtig negativBoden
Groundtruth
Falsch positiv richtigHindernis

Panorama Segmentierung
ktio
nbi
ldke
rpro
jek
nora
mab
Flurpunkte
Mar
kP
anWandpunkteWandpunkte
WandWand
Flur

Gliederung
Lernen durch DemonstrationLernen durch Demonstration
SegmentierungsalgorithmusSegmentierungsalgorithmus
Visuelle Merkmale
Trainieren, Validieren und Lernen
Experimentelle Ergebnisse

Visuelle Merkmale1t t 11
e de
sm
Seg
men
t
e de
sm
Seg
men
t 1
Spalten0
Höh
Flur
s im
Höh
Flur
s i m
Spalten0Spalten
Verhältnis der Menge Boden
Spalten
Verhältnis der Menge Boden
Menge des Gesamte Boden Fläche

Aggregierte Merkmale1
-1 +10
1
Seg
men
t
Ausgewähltespalte Schwellwert
des
Flur
S
0
Höh
e
1 2 3 4 5 6 7 8 9 10 11 12
Ausgangsgröße: Bahnkrümmung
vorherige Drehrichtung Spalten
Gesamtanzahl Merkmale : 53

Gliederung
Lernen durch DemonstrationLernen durch Demonstration
SegmentierungsalgorithmusSegmentierungsalgorithmus
Visuelle Merkmale
Trainieren, Validieren und Lernen
Experimentelle Ergebnisse

Instanzbasiertes Lernen
Anfrage k – nächste Nachbarn
nächste Nachbarn finden
nächste Nachbarn finden
Lokale Regression
1 – nächste Nachbarn 3 – nächste Nachbarn
Ausgabe
Abstandsgewichteter gMittelwert

Instanzbasiertes Lernen
Anfrage
nächste Nachbarn finden
nächste Nachbarn finden
Kernel
Lokale Regression
Lokale lineareRegression
Lokal linearesmodell
Ausgabe
Anfrage punkt X =0 35
Ausgabe
Anfrage punkt Xq=0.35
Ausgabe f

Merkmalsselektion
Forward ChainingForward Chaining
3 2
Ersten Parameter mit minimalen Generalisierungsfehler min identifizieren
43 2
M
Trainings-datensatz
Parameter 12 3 …53
M
Merkmall kti
Merkmal testen
selektieren
Merkmal testen
Fehler berechnen
NächstesMerkmal
min(<
i ?min=Stop
JaNein
min?

Trainingsszenarien
A hl d I t 8876Anzahl der Instanzen: 8876
Korridor 1 Korridor 2 Offener Raum
Foyer 1 Foyer 2Offener Raum

Merkmalsselektion
Merkmals-nummer Kategorie Merkmal
Endgültiger Merkmalsmenge : 13
2 Monokular Prozent der Wand
4 Monokular Höhe der Spalte 1
18 Monokular Verhältnis Menge Boden zwischen mer
18 Monokular grechts und links
19,20,21 Monokular Verhältnis Menge Boden zwischen Spaltenpaar 1-12, 2-11,3-10
mal
snum
m
25,26 Panorama Höhe der Spalte 1,2
40 Panorama Menge des Flursegments in Spalte 8M
erkm
41 Panorama Steigung der Linie
42 Panorama Abschnitt der Linie
46 Panorama Verhältnis Menge Boden zwischen Spaltenpaar 2-7Spaltenpaar 2 7
49 Robozentrisch Vorletzte Drehrichtung

Kreuzvalidierung
Anzahl der Merkmale 13 Anzahl der Beispiele 8876 Beispiele Korridor 1 3312p Beispiele Korridor 2 2302 Beispiele Offene Raum 3262
GleicheUmgebung
GleicheSzenarien Trainingsdaten Testdaten Effektivwert des
Fehlers[°/m]
k. block Rest k-1 blocken 8.58
k. block Korridor 1 Korridor 2 6.95
k block Korridor 2 Korridor 1 8 45k . block Korridor 2 Korridor 1 8.45
Korridor 1 Korridor 2 7.36
x Korridor 2 Korridor 1 7.28
Korridor 1&2 (Korridorfolge Verhalten) Offene Raum (Hindernisvermeidung) 14.07
Offene Raum (Hindernisvermeidung) Korridor 1&2 (Korridorfolge Verhalten) 9.58( g) ( g )

Gliederung
Lernen durch DemonstrationLernen durch Demonstration
SegmentierungsalgorithmusSegmentierungsalgorithmus
Visuelle Merkmale
Trainieren, Validieren und Lernen
Experimentelle Ergebnisse

Hindernisvermeidung
Hindernisvermeidung

Ecke Situation
Ecke Situation

Gelerntes Verhalten

Ausblick
Hierarchische Situationserkennung über• Umgebungsklassifikation
• Zeitlich, räumlichen Kontext von Wahrnehmung und Handlung
t
tt-1t-2t
t-1
• Aktuelle räumliche Wahrnehmung rein situationsbedingt
t 1
t-2• Aktuelle räumliche Wahrnehmung rein situationsbedingt

Vielen Dank für Ihre Aufmerksamkeit!Vielen Dank für Ihre Aufmerksamkeit!
Univ.-Prof. Dr.-Ing. Prof. h.c. Torsten BertramLehrstuhl für Regelungssystemtechnik
Related Documents











