CHÀO MỪNG MỌI NGƯỜI ĐẾN CHÀO MỪNG MỌI NGƯỜI ĐẾN VỚI BUỔI THUYẾT TRÌNH CỦA VỚI BUỔI THUYẾT TRÌNH CỦA NHÓM 6 NHÓM 6 CHỦ ĐỀ: ĐỘNG CƠ MỘT CHIỀU KHÔNG CHỔI THAN – BLDC.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
CHÀO MỪNG MỌI NGƯỜI ĐẾN CHÀO MỪNG MỌI NGƯỜI ĐẾN VỚI BUỔI THUYẾT TRÌNH CỦA VỚI BUỔI THUYẾT TRÌNH CỦA
NHÓM 6NHÓM 6
CHỦ ĐỀ:
ĐỘNG CƠ MỘT CHIỀU KHÔNG CHỔI THAN – BLDC.

Các vấn đề trình bày:Các vấn đề trình bày:
1.1. Tổng quan về động cơ BLDC.Tổng quan về động cơ BLDC.
2.2. Mô hình toán học và phương pháp Mô hình toán học và phương pháp điều khiển động cơ.điều khiển động cơ.
3.3. Thiết kế phần cứng mạch đk ĐC Thiết kế phần cứng mạch đk ĐC BLDC.BLDC.
4.4. VD đơn giản về lập trình và mô VD đơn giản về lập trình và mô phỏng động cơphỏng động cơ
5.5. Kết luận.Kết luận.
1.1. Giới thiệu về động cơ BLDC1.1. Giới thiệu về động cơ BLDC
• ĐCMC có hiệu suất cao, thích hợp truyền động servo.• Nhược điểm: dùng cổ góp và chổi than ( thiết bị dễ bị ăn mòn)
để khắc phục nhược điểm này người ta chế tạo loại động cơ không cần bảo dưỡng bằng cách thay thế chức năng của cổ góp và chổi than bởi các chuyển mạch sử dụng thiết bị bán dẫn.
• BLDC là một loại của động cơ đồng BLDC là một loại của động cơ đồng bộ nam châm vĩnh cửu, nó sử dụng bộ nam châm vĩnh cửu, nó sử dụng các bộ cảm biến vị trí và một bộ các bộ cảm biến vị trí và một bộ chuyển đổi (inverter) để điều khiển chuyển đổi (inverter) để điều khiển dòng điện phần ứngdòng điện phần ứng
• Có 2 loại BLDC chủ yếu:Có 2 loại BLDC chủ yếu:
- dạng hình thang- dạng hình thang
- dạng hình sin. - dạng hình sin.
• Đối với động cơ dạng hình thang thì sức Đối với động cơ dạng hình thang thì sức điện động gây ra trên cuộn dây stato có điện động gây ra trên cuộn dây stato có dạng hình thang và pha của nó cần cung dạng hình thang và pha của nó cần cung cấp dòng điện để tạo ra momen hoạt động cấp dòng điện để tạo ra momen hoạt động hầu như không có gợn sóng .hầu như không có gợn sóng .
• Với động cơ hình sin thì sức điện động có Với động cơ hình sin thì sức điện động có dạng hình sin và dòng điện pha yêu cầu dạng hình sin và dòng điện pha yêu cầu momen trơn.Hình dạng của sức điện động momen trơn.Hình dạng của sức điện động được xác định bởi hình dạng của nam được xác định bởi hình dạng của nam châm Roto và cách phân bố cuộn dây châm Roto và cách phân bố cuộn dây Stato.Stato.

1.2. Cấu tạo động cơ BLDC1.2. Cấu tạo động cơ BLDC
• Giống động cơ xoay chiều đồng bộ kích thích bằng nam châm vĩnh cửu.•Kết hợp với bộ đổi chiều điện tử chuyển mạch theo vị trí rotor.• ngoài ra còn có cảm biến vị trí để xác định vị trí rotor, bộ mã hoá so lệch (encoder) để đo tốc độ rotor của động cơ.

1.2.1. stato1.2.1. stato
Bao gồm lõi sắt (các lá thép kĩ thuật Bao gồm lõi sắt (các lá thép kĩ thuật điện ghép cách điện với nhau) và dây điện ghép cách điện với nhau) và dây quấn. Cách quấn dây của BLDC khác quấn. Cách quấn dây của BLDC khác so với cách quấn dây động 1 chiều so với cách quấn dây động 1 chiều thông thường,stato của BDCM chứa thông thường,stato của BDCM chứa dây quấn phần ứng, sự khác biệt này dây quấn phần ứng, sự khác biệt này tạo nên sức phản điện động dạng tạo nên sức phản điện động dạng hình thang.hình thang.

Stator động cơ BLDCStator động cơ BLDC
Dây quấn phần ứng có thể là Dây quấn phần ứng có thể là 2 pha hoặc 3 pha.2 pha hoặc 3 pha.Đối với dây quấn 3 pha có 2 Đối với dây quấn 3 pha có 2 cách mắc :cách mắc : + Cách mắc hình sao + Cách mắc hình sao
+ Cách mắc hình tam + Cách mắc hình tam giácgiác

1.2.2. Roto 1.2.2. Roto Được gắn vào trục động cơ và trên Được gắn vào trục động cơ và trên bề mặt có dán các thanh nam châm bề mặt có dán các thanh nam châm vĩnh cửu.Ở các động cơ yêu cầu vĩnh cửu.Ở các động cơ yêu cầu quán tính nhỏ,người ta thường chế quán tính nhỏ,người ta thường chế tạo trục của động cơ có dạng hình trụ tạo trục của động cơ có dạng hình trụ rỗng.rỗng.
1.2.3. Cảm biến vị trí Hall 1.2.3. Cảm biến vị trí Hall sensorsensor
• Do đặc thù sức phản điện động có dạng Do đặc thù sức phản điện động có dạng hình thang nên cấu hình điều khiển hình thang nên cấu hình điều khiển thông thường của BLDC cần có cảm biến thông thường của BLDC cần có cảm biến xác định vị trí của từ trường rotor so với xác định vị trí của từ trường rotor so với các pha của cuộn dây stator. các pha của cuộn dây stator.
• Có nhiều loại cảm biến vị trí nhưng nó Có nhiều loại cảm biến vị trí nhưng nó đều theo các nguyên lý :đều theo các nguyên lý :+Điện từ :máy phát đồng bộ xoay chiều.+Điện từ :máy phát đồng bộ xoay chiều.+ Quang điện : encorder+ Quang điện : encorder+ Cảm biến hall+ Cảm biến hall

Người ta thường dùng cảm biến Người ta thường dùng cảm biến hiệu ứng Hall, gọi tắt là Hall hiệu ứng Hall, gọi tắt là Hall sensor sensor
Nó tạo ra sức điện động đồng Nó tạo ra sức điện động đồng bộ phục vụ cho việc đóng cắt bộ phục vụ cho việc đóng cắt các van bán dẫn ở bộ chuyển các van bán dẫn ở bộ chuyển mạch điện từmạch điện từ
1.3. Nguyên lý hoạt động1.3. Nguyên lý hoạt động
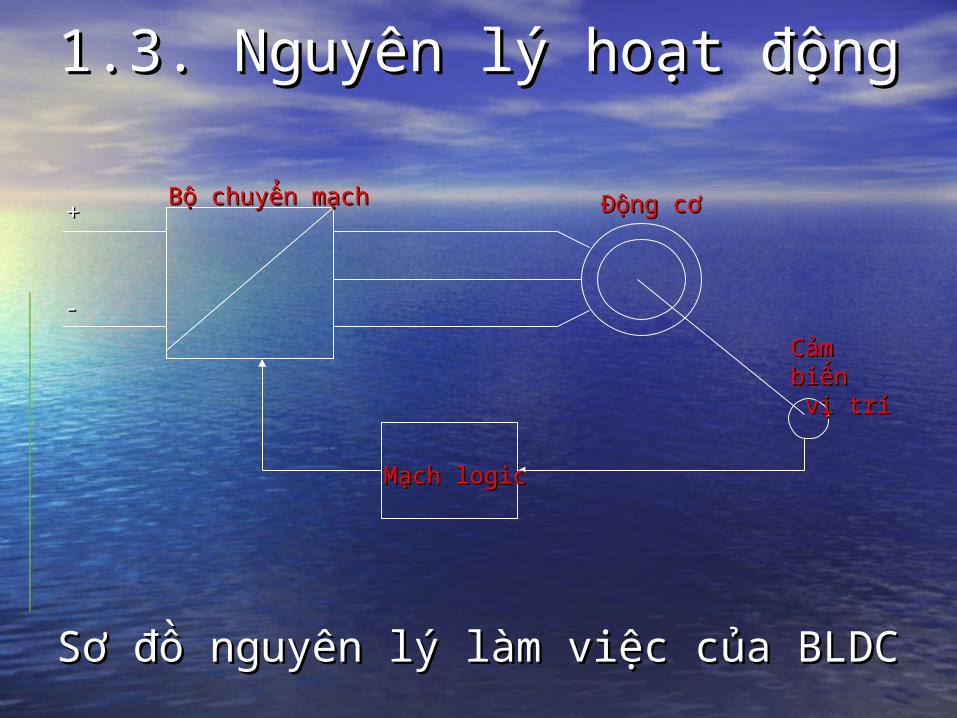
Sơ đồ nguyên lý làm việc của BLDCSơ đồ nguyên lý làm việc của BLDC
++
--
Bộ chuyển mạchBộ chuyển mạch Động cơĐộng cơ
Cảm Cảm biếnbiến vị trívị trí
Mạch logicMạch logic


ƯƯu điểm của động cơ BLDC so với u điểm của động cơ BLDC so với động cơ DC có chổi thanđộng cơ DC có chổi than
1. Mang đầy đủ tính năng của động cơ DC có chổi than1. Mang đầy đủ tính năng của động cơ DC có chổi than1. Mang đầy đủ tính năng của động cơ DC có chổi than1. Mang đầy đủ tính năng của động cơ DC có chổi than
2. Công suất để vận hành nó ít hơn2. Công suất để vận hành nó ít hơn2. Công suất để vận hành nó ít hơn2. Công suất để vận hành nó ít hơn
3. Các vi sử lý gắn trên nó cho phép lập trình được3. Các vi sử lý gắn trên nó cho phép lập trình được3. Các vi sử lý gắn trên nó cho phép lập trình được3. Các vi sử lý gắn trên nó cho phép lập trình được
4. Khối lượng nhẹ hơn ( tăng tốc nhanh, bay cao hơn )4. Khối lượng nhẹ hơn ( tăng tốc nhanh, bay cao hơn )4. Khối lượng nhẹ hơn ( tăng tốc nhanh, bay cao hơn )4. Khối lượng nhẹ hơn ( tăng tốc nhanh, bay cao hơn )
5. Thay thế các loại động cơ dùng nguyên liệu cháy5. Thay thế các loại động cơ dùng nguyên liệu cháy5. Thay thế các loại động cơ dùng nguyên liệu cháy5. Thay thế các loại động cơ dùng nguyên liệu cháy

Ý nghĩa tên động cơ 1 chiều Ý nghĩa tên động cơ 1 chiều không chổi thankhông chổi than
• Động cơ BLDC mặc dù có tên là “một Động cơ BLDC mặc dù có tên là “một chiều không chổi than” nhưng nó chiều không chổi than” nhưng nó thuộc nhóm động cơ đồng bộ nam thuộc nhóm động cơ đồng bộ nam châm vĩnh cửu chứ không phải là châm vĩnh cửu chứ không phải là động cơ một chiều. động cơ một chiều.
• Dưới mỗi pha dẫn ta thấy đều có Dưới mỗi pha dẫn ta thấy đều có dòng điện 1 chiều và sức điện động 1 dòng điện 1 chiều và sức điện động 1 chiều, do đó động cơ BLDC có đặc chiều, do đó động cơ BLDC có đặc tính cơ và đặc tính điều khiển giống tính cơ và đặc tính điều khiển giống với động cơ 1 chiều. với động cơ 1 chiều.
• Chính vì thế mà động cơ này có tên Chính vì thế mà động cơ này có tên gọi là “động cơ một chiều không chổi gọi là “động cơ một chiều không chổi than” chứ thực ra nó là động cơ xoay than” chứ thực ra nó là động cơ xoay chiều đồng bộ nam châm vĩnh cửu.chiều đồng bộ nam châm vĩnh cửu.
2. 2. Mô hình toán học và phương pháp điều khiển Mô hình toán học và phương pháp điều khiển động cơ.động cơ.
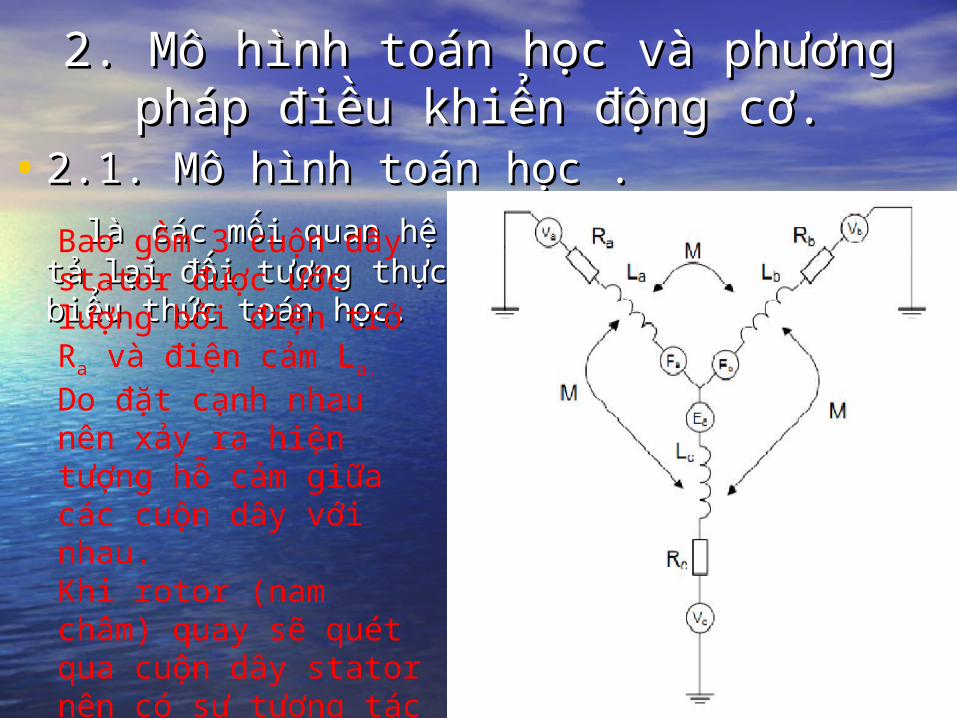
• 2.1. 2.1. Mô hình toán học .Mô hình toán học .
làlà các mối quan hệ toán học nhằm mục đích mô tả lại các mối quan hệ toán học nhằm mục đích mô tả lại đối tượng thực tế đó nhưng dưới dạng các biểu thức đối tượng thực tế đó nhưng dưới dạng các biểu thức toán học.toán học.
Bao gồm 3 cuộn dây stator được ước lượng bởi điện trở Ra và điện cảm La.
Do đặt cạnh nhau nên xảy ra hiện tượng hỗ cảm giữa các cuộn dây với nhau.Khi rotor (nam châm) quay sẽ quét qua cuộn dây stator nên có sự tương tác giữa hai từ trường.
2. 2. Mô hình toán học và phương pháp điều khiển Mô hình toán học và phương pháp điều khiển động cơ.động cơ.
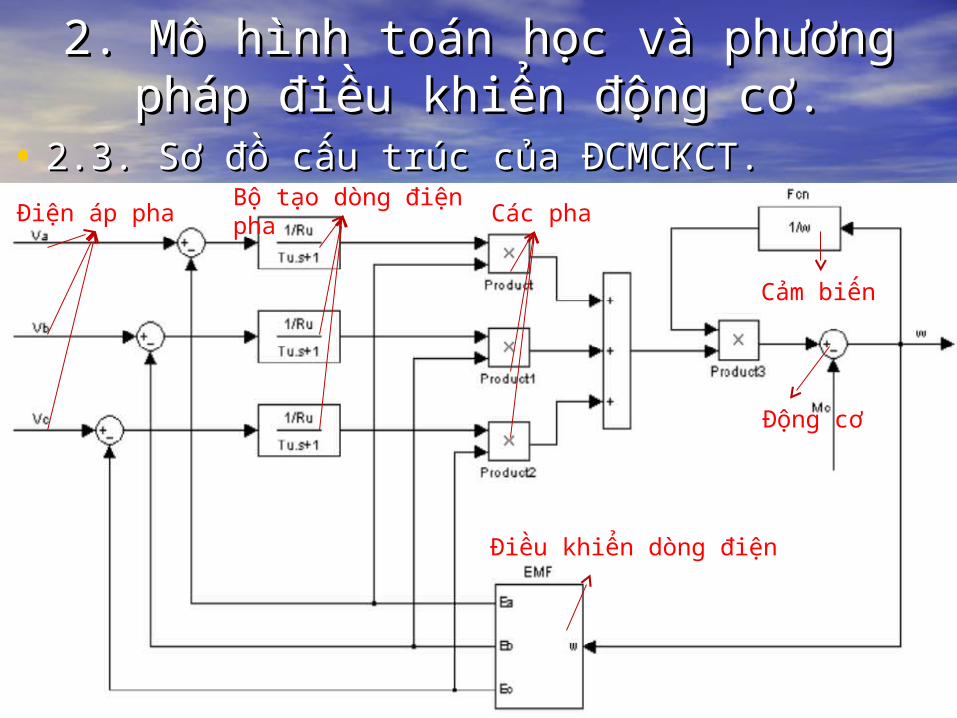
• 2.3. Sơ đồ cấu trúc của ĐCMCKCT.2.3. Sơ đồ cấu trúc của ĐCMCKCT.
Sơ đồ cấu trúc của ĐCMCKCT mang tính tổng Sơ đồ cấu trúc của ĐCMCKCT mang tính tổng quát cho một động cơ 3 pha.quát cho một động cơ 3 pha.
Điện áp phaBộ tạo dòng điện pha
Điều khiển dòng điện
Động cơ
Cảm biến
Các pha
• Phương pháp điều khiển Phương pháp điều khiển truyền thống động cơ BLDC là truyền thống động cơ BLDC là đóng cắt các khóa mạch lực đóng cắt các khóa mạch lực (IGBT hoặc MOSFET) để cấp (IGBT hoặc MOSFET) để cấp dòng điện vào cuộn dây stator dòng điện vào cuộn dây stator động cơ dựa theo tín hiệu Hall động cơ dựa theo tín hiệu Hall sensor đưa về.sensor đưa về.
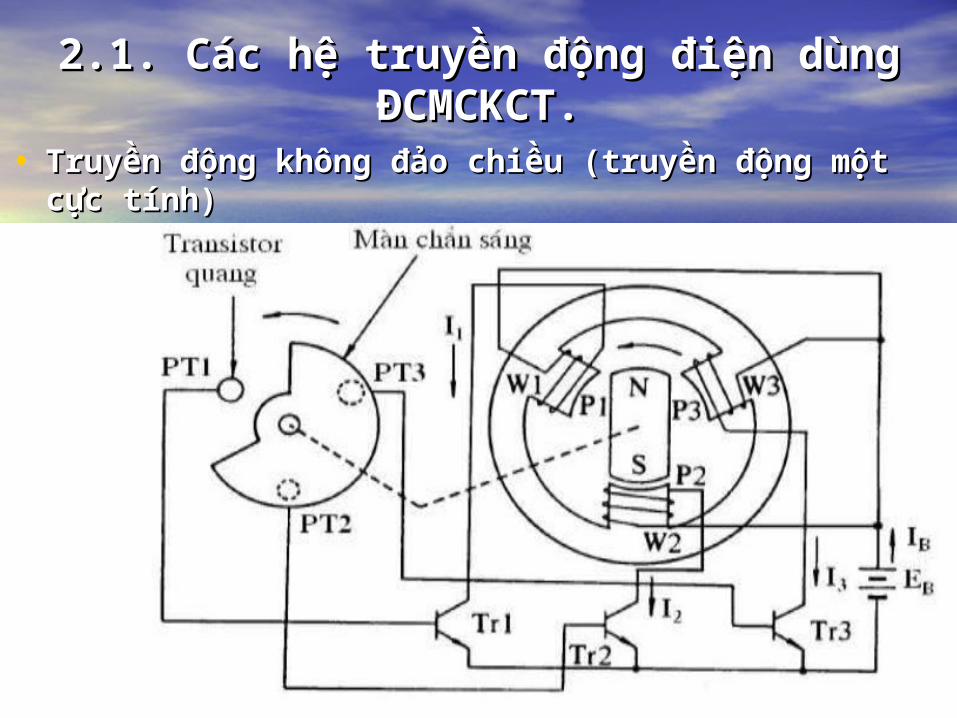
2.1. Các hệ truyền động điện dùng 2.1. Các hệ truyền động điện dùng ĐCMCKCT.ĐCMCKCT.
• Truyền động không đảo chiều (truyền động một Truyền động không đảo chiều (truyền động một cực tính)cực tính)

2.1. Các hệ truyền động điện 2.1. Các hệ truyền động điện dùng ĐCMCKCT.dùng ĐCMCKCT.
• Truyền động có đảo chiều (truyền động Truyền động có đảo chiều (truyền động hai cực tính)hai cực tính)

2.2. Các phương pháp điều khiển động 2.2. Các phương pháp điều khiển động cơ.cơ.
đo suất điện động phản hồi từ các cuộn dây để xác định vị trí của rotor
Cách đk động cơ
sử dụng cảm biến hiệu ứng Hall để xác định vị trí rotor
sử dụng cảm biến hiệu ứng Hall để xác định vị trí rotor
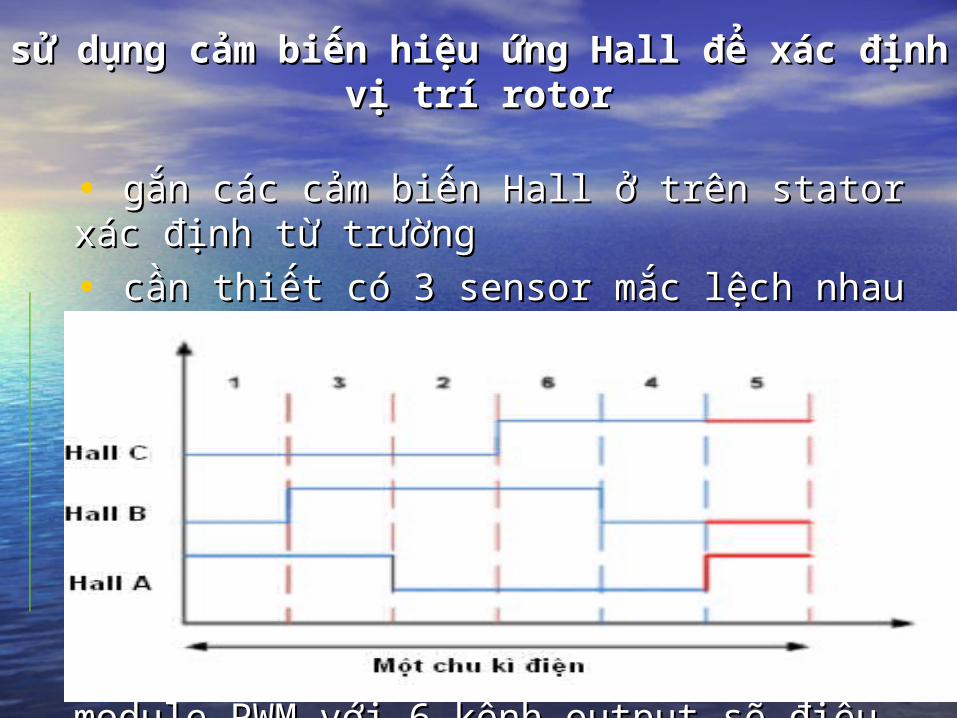
sử dụng cảm biến hiệu ứng Hall để xác định sử dụng cảm biến hiệu ứng Hall để xác định vị trí rotorvị trí rotor
• gắn các cảm biến Hall ở trên stator xác định gắn các cảm biến Hall ở trên stator xác định từ trườngtừ trường
• cần thiết có 3 sensor mắc lệch nhau 120cần thiết có 3 sensor mắc lệch nhau 120oo
• Sau khi đã xác định được vị trí của rotor xác Sau khi đã xác định được vị trí của rotor xác định xem 2 cuộn nào cần được kíchđịnh xem 2 cuộn nào cần được kích
• sử dụng dòng vi điều khiển DsPic cập nhật sử dụng dòng vi điều khiển DsPic cập nhật giá trị điều khiển mỗi khi giá trị của 3 bit Hall giá trị điều khiển mỗi khi giá trị của 3 bit Hall thay đổithay đổi
• Vi điều khiển DsPic30F2010 có 6 một Vi điều khiển DsPic30F2010 có 6 một module PWM với 6 kênh output sẽ điều khiển module PWM với 6 kênh output sẽ điều khiển 6 MOSFET đóng vai trò là chuyển mạch điện tử 6 MOSFET đóng vai trò là chuyển mạch điện tử cho động cơcho động cơ
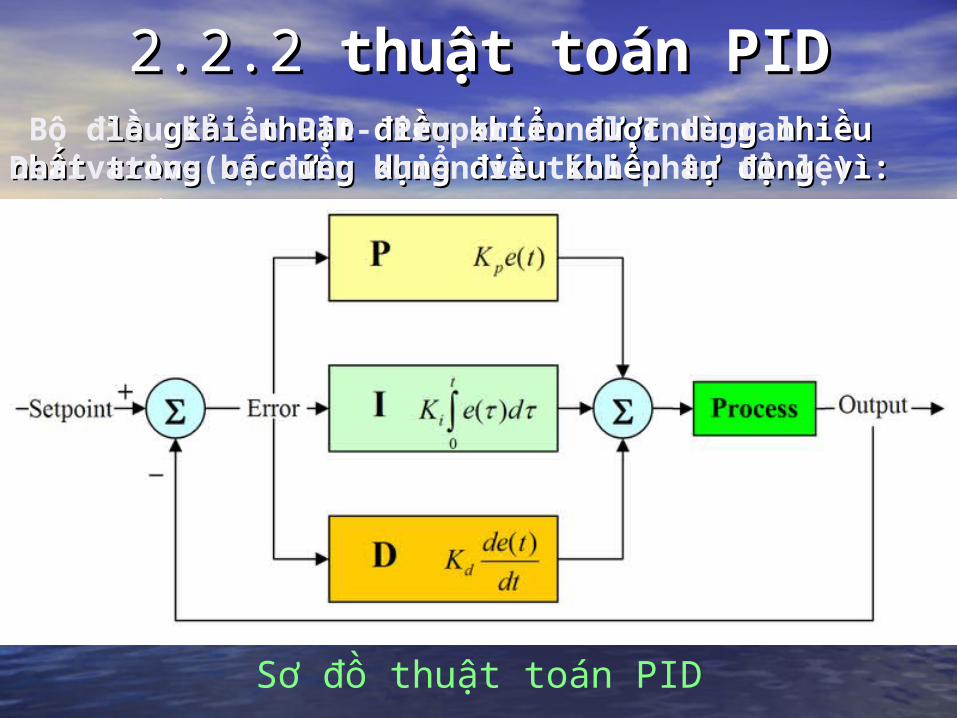
2.2.2 2.2.2 thuật toán PIDthuật toán PIDlà giải thuật điều khiển được dùng nhiều nhất trong các ứng là giải thuật điều khiển được dùng nhiều nhất trong các ứng
dụng điều khiển tự động vì:dụng điều khiển tự động vì:
cấu trúc và nguyên lý hoạt động đơn giản1
có rất nhiều phương pháp và công cụ mạnh hỗ trợ2
các luật điều khiển PID số thích hợp với quá trình CN3
Có 3 khâu và tạo thành bởi các biến điều khiển 4
Sơ đồ thuật toán PID
Bộ điều khiển PID- Proportional Integral Derivative(bộ điều khiển vi tích phân tỉ lệ)
user to
process quy trình
3. Thiết kế phần cứng3. Thiết kế phần cứng
Phần cứng được xây dựng với trung Phần cứng được xây dựng với trung tâm là vi điều khiển DsPic30F2010 có 6 tâm là vi điều khiển DsPic30F2010 có 6 module điều khiển động cơ với 6 kênh module điều khiển động cơ với 6 kênh PWM. Các chân PWM sẽ được nối với 3 PWM. Các chân PWM sẽ được nối với 3 cầu IC IR2101 điều khiển 6 MOSFET để cầu IC IR2101 điều khiển 6 MOSFET để điều khiển động cơđiều khiển động cơ
3.13.1 Các loại IC được sử dụng và Các loại IC được sử dụng và đặc điểm của chúng.đặc điểm của chúng.
1.1.Microchip dsPIC30F2010.Microchip dsPIC30F2010.
2.2.Diriver IR2101S.Diriver IR2101S.
3.3.MOSFET IRFR2407.MOSFET IRFR2407.
4.4.Điện trở Shunt và các IC khuếch Điện trở Shunt và các IC khuếch đại, so sánh.đại, so sánh.
• 1. Microchip dsPIC30F2010.1. Microchip dsPIC30F2010.

2.2. Diriver IR2101S. Diriver IR2101S.• Chịu được dòng điện âm Chịu được dòng điện âm
dV/dtdV/dt
• Dải cấp cho cổng điều khiển Dải cấp cho cổng điều khiển từ 10V-20V từ 10V-20V
• Khóa điện áp thấpKhóa điện áp thấp
• 3.3V, 5V và 15V là đầu vào cổng logic 3.3V, 5V và 15V là đầu vào cổng logic tương ứngtương ứng
• Trễ lan truyền trong cả hai kênhTrễ lan truyền trong cả hai kênh
3. MOSFET IRFR2407.3. MOSFET IRFR2407.• Là phần tử chuyển mạch công suất để điều Là phần tử chuyển mạch công suất để điều
khiển động cơ khiển động cơ • điều khiển đóng cắt thiết bị bằng cách điều điều khiển đóng cắt thiết bị bằng cách điều
khiển điện áp ở chân Gatekhiển điện áp ở chân Gate

4. Điện trở Shunt và các IC khuếch đại, . Điện trở Shunt và các IC khuếch đại, so sánh.so sánh.
4.1 điện trở shunt4.1 điện trở shunt
• Điện trở Shunt có thể cung cấp giá trị Điện trở Shunt có thể cung cấp giá trị đo chính xác và giá cả phải chăngđo chính xác và giá cả phải chăng
• Có thể dùng 1 điện trở shunt để đo Có thể dùng 1 điện trở shunt để đo dòng của cả 3 pha hoặc mỗi pha dùng 1 dòng của cả 3 pha hoặc mỗi pha dùng 1 điện trở shunt để đo dòng mỗi phađiện trở shunt để đo dòng mỗi pha
• điện trở shunt có thể đo dòng điện điện trở shunt có thể đo dòng điện qua trở ở phía thấp hoặc ở phía caoqua trở ở phía thấp hoặc ở phía cao
4.1.1 Đo dòng phía cao4.1.1 Đo dòng phía cao• Đo dòng điện phía cao có thể được thực Đo dòng điện phía cao có thể được thực
hiện với mạch khuếch đại vi sai đầu ra là hiện với mạch khuếch đại vi sai đầu ra là điện áp tỉ lệ với giá trị Vsense hoặc dòng điện áp tỉ lệ với giá trị Vsense hoặc dòng điện qua tải. Mạch khuếch đại vi sai có điện qua tải. Mạch khuếch đại vi sai có thể được tiến hành với 1 ổn áp và điện trở thể được tiến hành với 1 ổn áp và điện trở rời hoặc 1 IC tích hợp.rời hoặc 1 IC tích hợp.
ƯU ĐiỂM:•Ít xâm nhập vào mạch không tác động tới đăc tính EMI của hệ thống•Có thể dò lỗi quá dòng Và có thể gây ra ngắn mạch•lọc nhiễu không mong muốn •giảm điện áp ở cuối đầu vào bộ khuếch đại
Nhược điểm•Điện áp Vsense xấp xỉ bằng điện áp nguồn cấp có thể quá dải điện áp đầu vào lớn nhất của bộ khuếch đại thuật toán•CMRR của bộ khuếch đại vi phân sẽ bị giảm do điện trở dung cho bộ khuếch đại không khớp•Trở đầu vào mạch vi sai tương đối thấp và bất đối xứng
4.1.2 4.1.2 Đo dòng điện phía thấpĐo dòng điện phía thấp
• Đo dòng phía thấp có thuận lợi có thể dùng Đo dòng phía thấp có thuận lợi có thể dùng cho ổn áp điện áp thấp bởi vì việc đo lấy đất làm cho ổn áp điện áp thấp bởi vì việc đo lấy đất làm quy chiếu. Mạch đo dòng phía thấp có thể sử dụng quy chiếu. Mạch đo dòng phía thấp có thể sử dụng 1 bộ khuếch đại không đảo.1 bộ khuếch đại không đảo.
• Ưu điểm:Ưu điểm:
Vsense được thâm chiếu với đất (GND). Do Vsense được thâm chiếu với đất (GND). Do đó có thể dùng khuếch đại điện áp thấp.đó có thể dùng khuếch đại điện áp thấp.
Bộ khuếch đại không đảo có thể dung và trở Bộ khuếch đại không đảo có thể dung và trở vào của mạch bằng với trở vào của bộ khuếch đại.vào của mạch bằng với trở vào của bộ khuếch đại.
• Nhược điểm:Nhược điểm:
Các giám sát dòng điện phía thấp không có Các giám sát dòng điện phía thấp không có thể dó ra lỗi khi tải nối xuống đất bị lỗi.thể dó ra lỗi khi tải nối xuống đất bị lỗi.
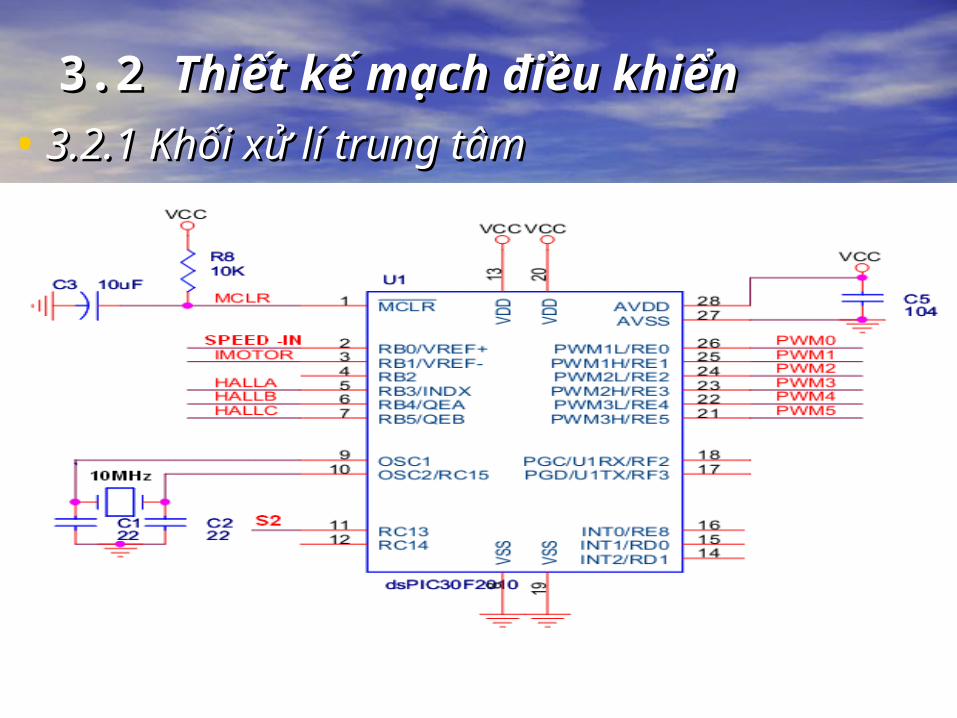
3.2 3.2 Thiết kế mạch điều khiểnThiết kế mạch điều khiển• 3.2.1 Khối xử lí trung tâm3.2.1 Khối xử lí trung tâm
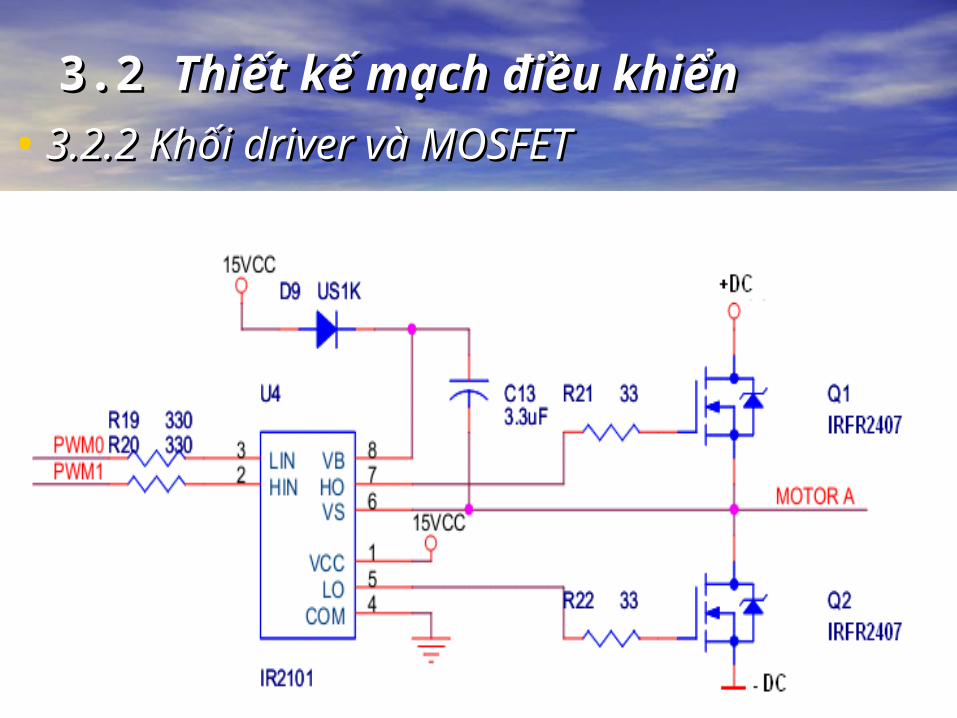
3.2 3.2 Thiết kế mạch điều khiểnThiết kế mạch điều khiển• 3.2.2 Khối driver và MOSFET3.2.2 Khối driver và MOSFET
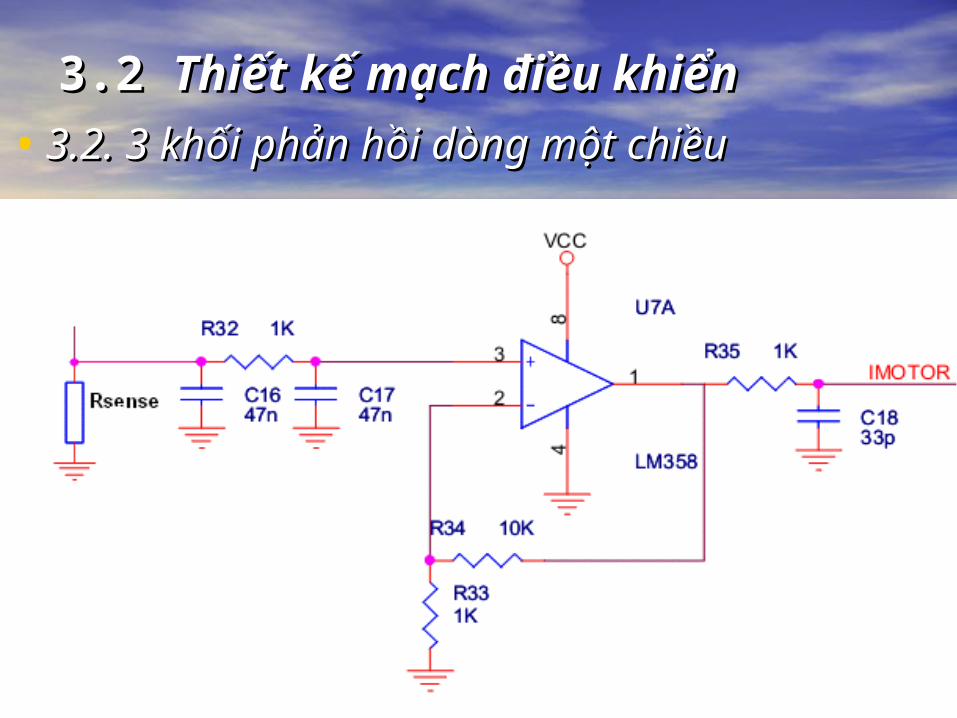
3.2 3.2 Thiết kế mạch điều khiểnThiết kế mạch điều khiển• 3.2.3.2. 3 khối phản hồi dòng một chiều3 khối phản hồi dòng một chiều
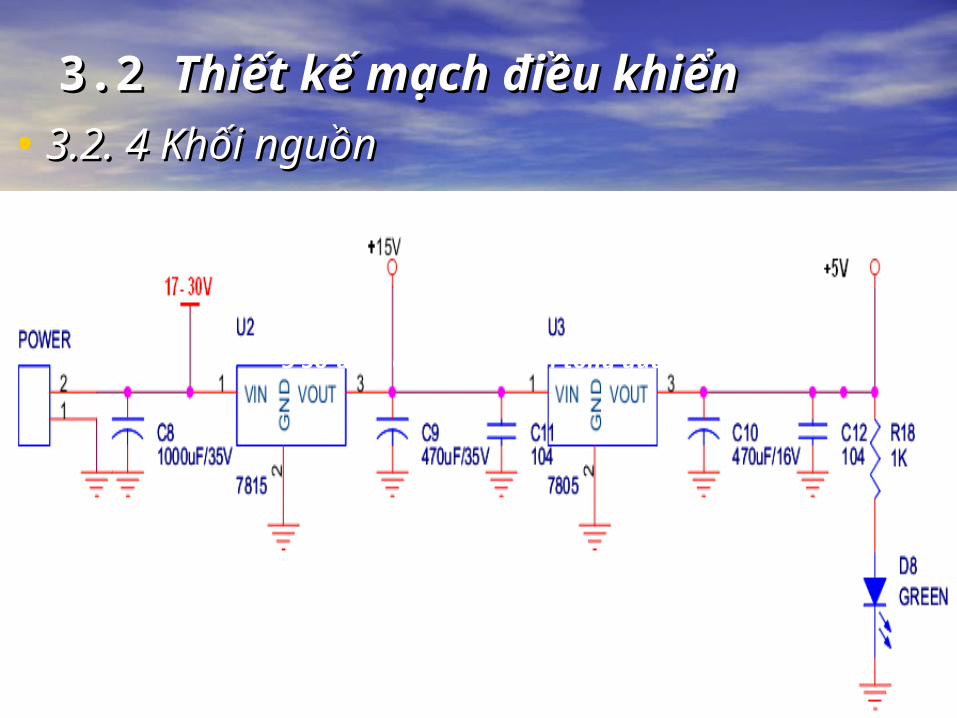
3.2 3.2 Thiết kế mạch điều khiểnThiết kế mạch điều khiển• 3.2.3.2. 4 Khối nguồn4 Khối nguồn
5 Sơ đồ mạch điều khiển tổng quát
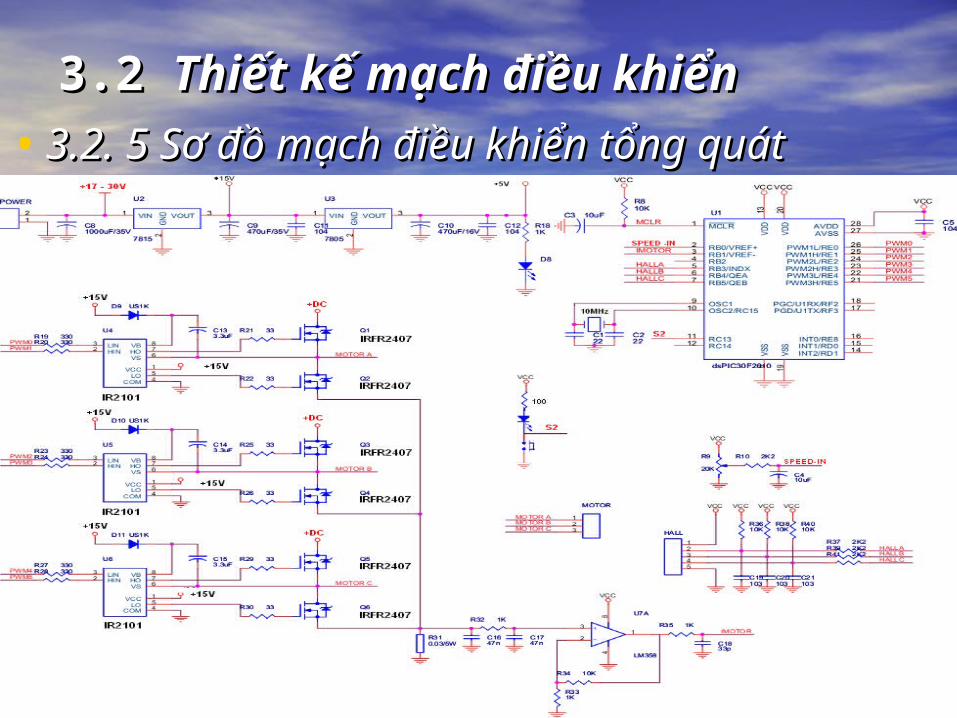
3.2 3.2 Thiết kế mạch điều khiểnThiết kế mạch điều khiển• 3.2.3.2. 5 Sơ đồ mạch điều khiển tổng quát5 Sơ đồ mạch điều khiển tổng quát

Phần 4: Phần 4: VD đơn giản về lập trình và mô phỏng VD đơn giản về lập trình và mô phỏng động cơđộng cơ
• Sơ đồ khốiSơ đồ khối
điều khiển điều khiển
vòng kín 2 vòng kín 2
thành phần PIthành phần PI
Sơ đồ khối cho sự kiện ngắt CNSơ đồ khối cho sự kiện ngắt CN
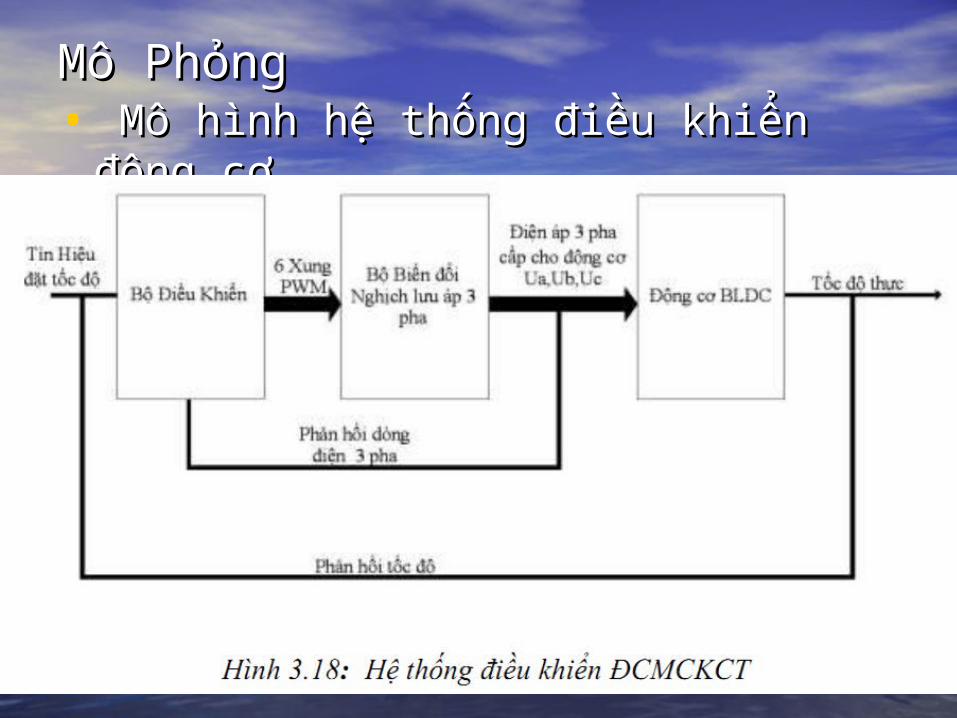
Mô PhỏngMô Phỏng• Mô hình hệ thống điều khiển động cơMô hình hệ thống điều khiển động cơ
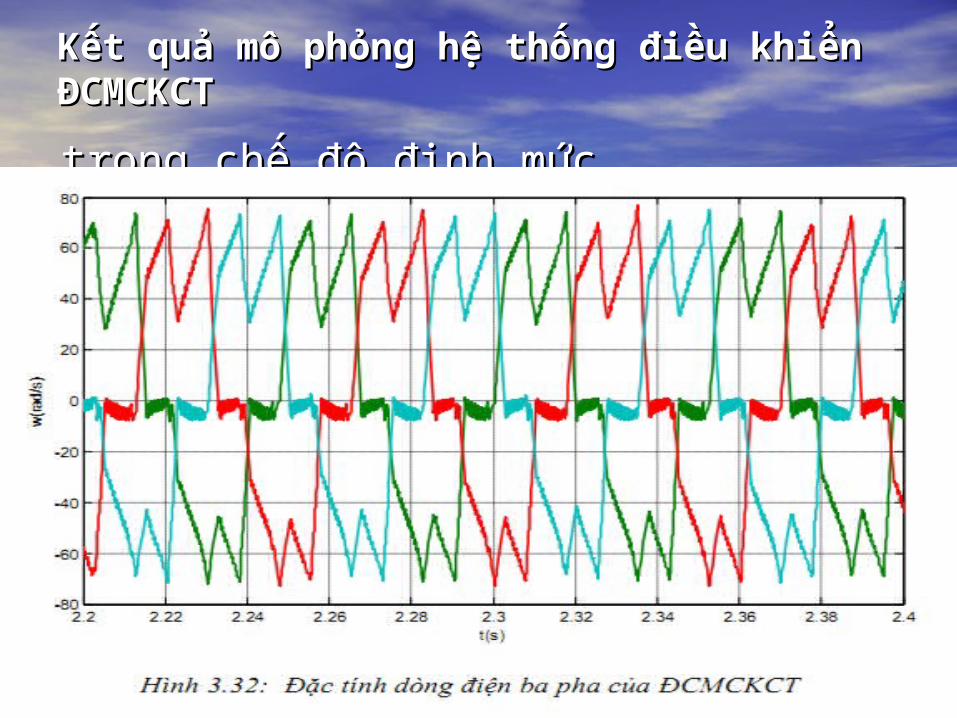
Kết quả mô phỏng hệ thống điều khiển Kết quả mô phỏng hệ thống điều khiển ĐCMCKCTĐCMCKCT
trong chế độ định mức. trong chế độ định mức.
• Tốc độ đặt: ωTốc độ đặt: ωđmđm = 120 rad/s = 120 rad/s
• Mômen định mức: MMômen định mức: Mđmđm = 250 N.m = 250 N.m
• Dòng điện định mức: IDòng điện định mức: Iđm đm = 78A= 78A
Nhận xét kết quả mô Nhận xét kết quả mô phỏngphỏng• - Hình dáng của dòng điện, sức điện động - Hình dáng của dòng điện, sức điện động
đều giống như lý thuyết. Biên độ của các đều giống như lý thuyết. Biên độ của các thông số điều khiển gồm tốc độ, dòng điện, thông số điều khiển gồm tốc độ, dòng điện, mômen động cơ cũng bằng với các tín hiệu mômen động cơ cũng bằng với các tín hiệu đặt. đặt.
• - Tuy nhiên, độ nhấp nhô mômen còn khá - Tuy nhiên, độ nhấp nhô mômen còn khá lớn, tốc độ chưa ổn định mà vẫn còn dao lớn, tốc độ chưa ổn định mà vẫn còn dao động quanh giá trị cân bằng, đây chính là động quanh giá trị cân bằng, đây chính là nhược điểm của các ĐCMCKCT và hiện nay nhược điểm của các ĐCMCKCT và hiện nay rất nhiều nhà khoa học đang tìm cách giải rất nhiều nhà khoa học đang tìm cách giải quyết. quyết.
5. Kết luận5. Kết luận
• Do những đặc tính của động cơ một Do những đặc tính của động cơ một chiều không chổi than:có thể tạo ra chiều không chổi than:có thể tạo ra công suất lớn,dễ dàng điều chỉnh tốc công suất lớn,dễ dàng điều chỉnh tốc độ…nên ngầy nay BLDC được ứng độ…nên ngầy nay BLDC được ứng dụng rất rộng rãi trong các ngành dụng rất rộng rãi trong các ngành nghề công nghiệp và dân dụng.nghề công nghiệp và dân dụng.
• Qua bài này ta đã rút ra cấu tạo của Qua bài này ta đã rút ra cấu tạo của động cơ một chiều không chổi động cơ một chiều không chổi than.Đồng thời đã tìm hiểu thêm than.Đồng thời đã tìm hiểu thêm được về cách điều khiển động cơ.Đây được về cách điều khiển động cơ.Đây là mục đích quan trọng nhất đối với là mục đích quan trọng nhất đối với tất cả các động cơ.tất cả các động cơ.
• Tuy nhiên ta vẫn gặp phải một số Tuy nhiên ta vẫn gặp phải một số khó khăn như : phải lập trình điều khó khăn như : phải lập trình điều khiển động cơ, khắc phục độ ổn định khiển động cơ, khắc phục độ ổn định của động cơ.của động cơ.

Related Documents











