Distributed Cooperative Control of Multiple Vehicle Formations Using Structural Potential Functions Reza Olfati-Saber Postdoctoral Scholar Control and Dynamical Systems California Institute of Technology [email protected] UCLA, March 2nd, 2002

Distributed Cooperative Control of Multiple Vehicle Formations Using Structural Potential Functions Reza Olfati-Saber Postdoctoral Scholar Control and.
Dec 21, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Distributed Cooperative Control of Multiple Vehicle Formations Using
Structural Potential Functions
Reza Olfati-Saber
Postdoctoral Scholar Control and Dynamical Systems
California Institute of [email protected]
UCLA, March 2nd, 2002

Outline• Introduction• Multi-vehicle Formations• Past Research• Coordinated Tasks
– Stabilization/Tracking– Rejoin/Split/Reconfiguration Maneuvers
• Why Distributed Control?• Formation Graphs
– Rigidity/Foldability of Graphs• Potential Functions• Distributed Control Laws• Simulation Results• Conclusions

Introduction
Definition: Multi-agent Systems are systems that consist of multiple agents or vehicles with several sensors/actuators and the capability to communicate with one another to perform coordinated tasks.
Applications:– Automated highways– Air traffic control– Satellite formations– Search and rescue operations– Robots capable of playing games (e.g. soccer/capture the flag)– Formation flight of UAV’s (Unmanned Aerial Vehicles)
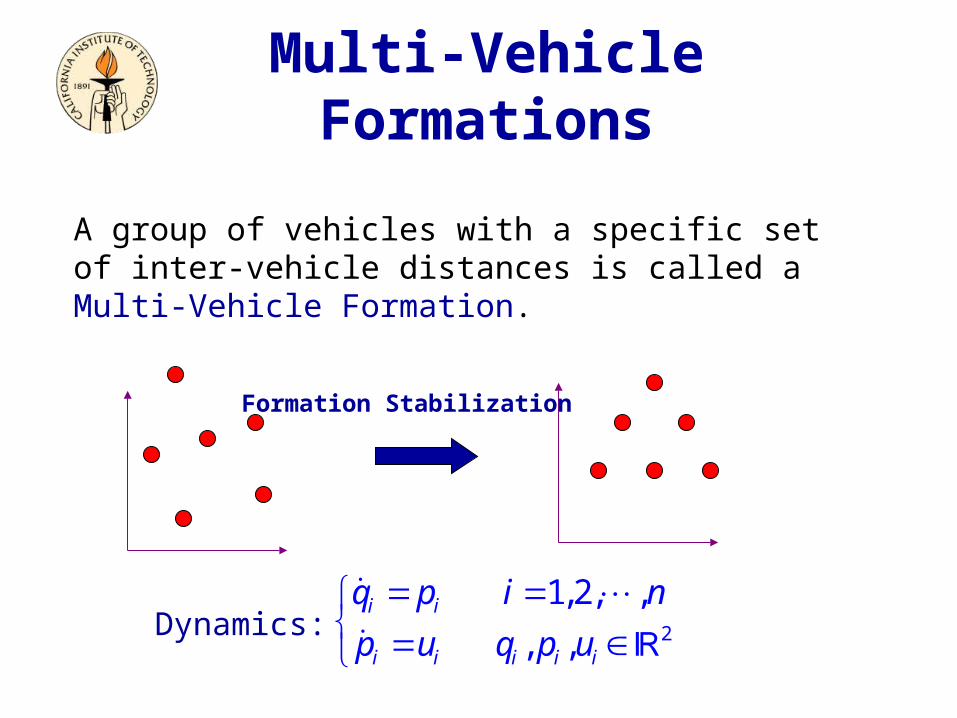
Multi-Vehicle Formations
A group of vehicles with a specific set of inter-vehicle distances is called a Multi-Vehicle Formation.
Formation Stabilization
Dynamics: 2
1,2, ,
, ,i i
i i i i i
q p i n
p u q p u

Past Research
• Robotics: navigation using artificial potential functions (Rimon and Koditschek, 1992)
• Multi-vehicle Systems: – Coordinated control of groups using artificial
potentials (Leonard and Fiorelli, 2001)
– Information flow on graphs associated with multi-vehicle systems (Fax and Murray, 2001)

Why Distributed Control?• No vehicle knows the state/control of all other vehicles
• No vehicle knows its relative configuration/velocity w.r.t. all other vehicles unless n = 2,3
• The control law for each vehicle must be distributed so that the overall computational complexity of the problem is acceptable for large number of vehicles
• A system controlled via a centeralized computer does not function if that computer breaks.
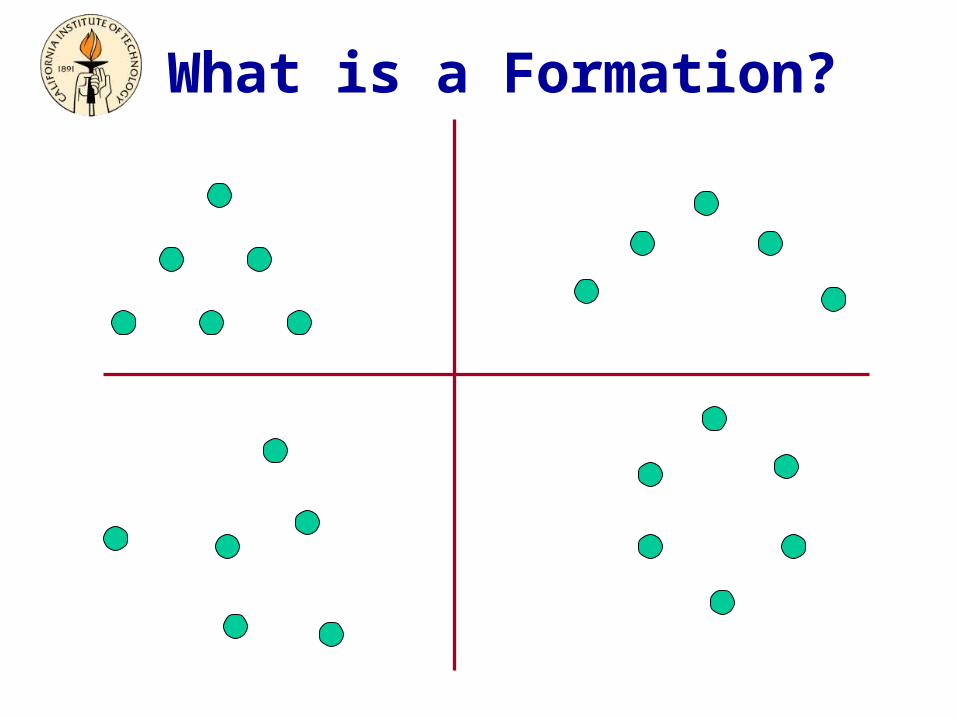
What is a Formation?

Formation Representation
2( 2)3 3( , , , , , )
1 2( 2) 2 3, 2
nn nl x y x y
f n n n
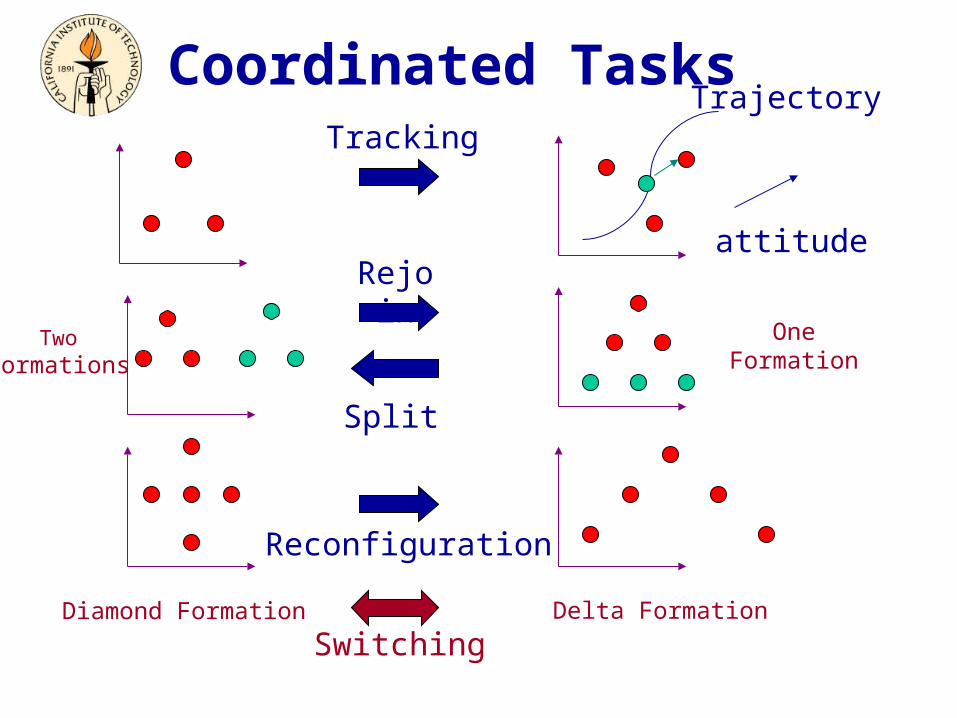
Coordinated Tasks
attitude
Tracking
Trajectory
Rejoin
Split
Reconfiguration
Diamond Formation Delta Formation
TwoFormations
One Formation
Switching
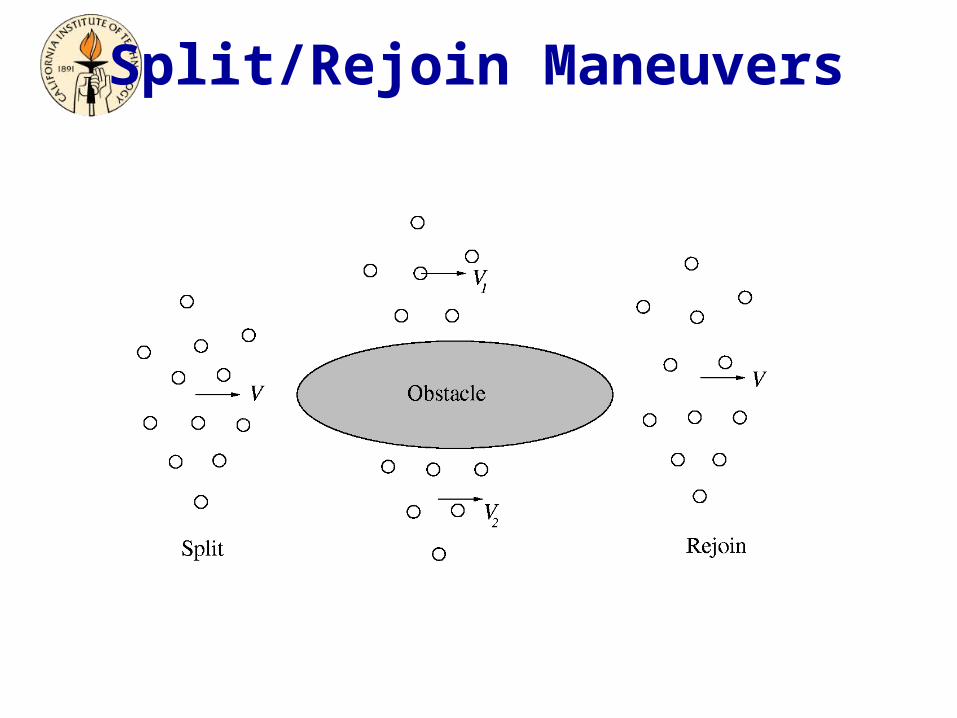
Split/Rejoin Maneuvers
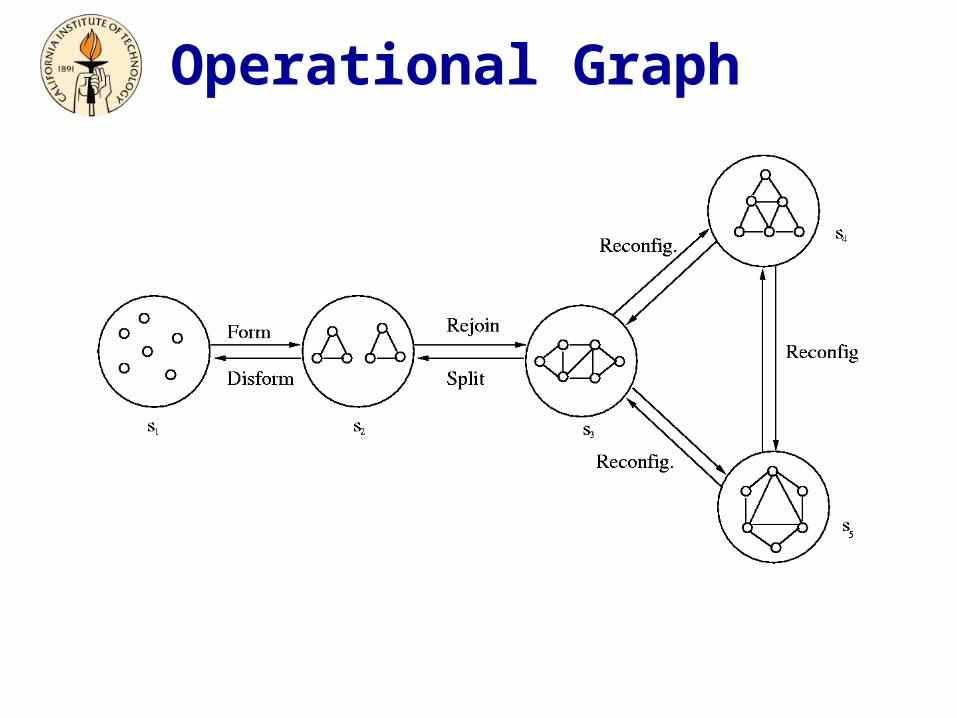
Operational Graph
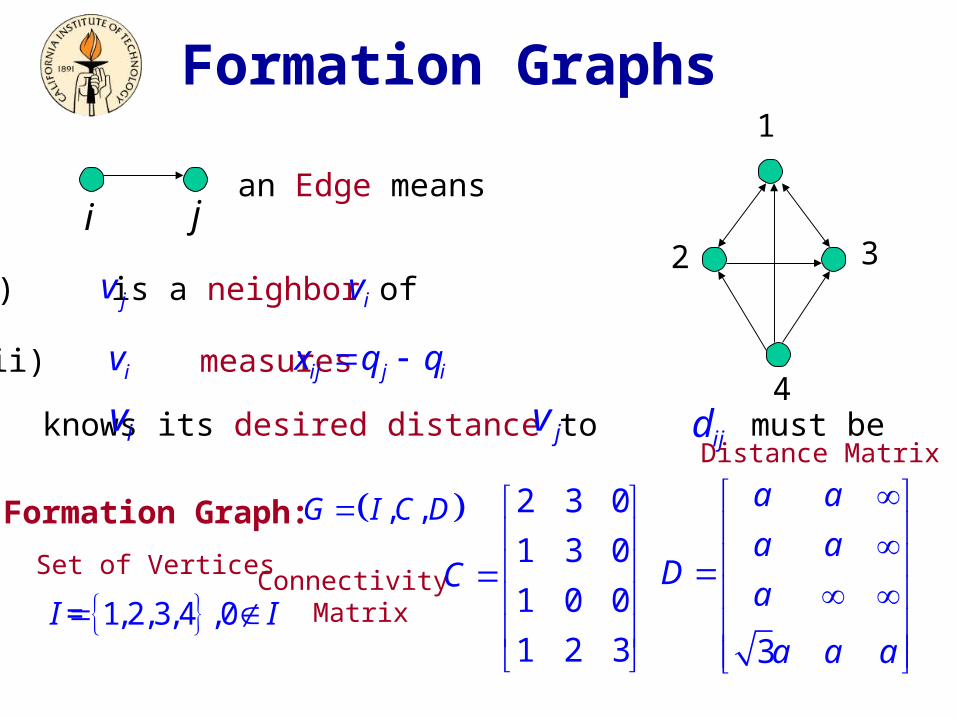
Formation Graphs1
2 3
4 ii) measures ij j ix q q
iii) knows its desired distance to must be jviv ijd
an Edge means
i) is a neighbor of
Formation Graph:
Connectivity Matrix
Distance Matrix
Set of Vertices
, ,G I C D
1,2,3,4 ,0I I =
2 3 0
1 3 0
1 0 0
1 2 3
C
3
a a
a aD
a
a a a
i j
jv iv
iv
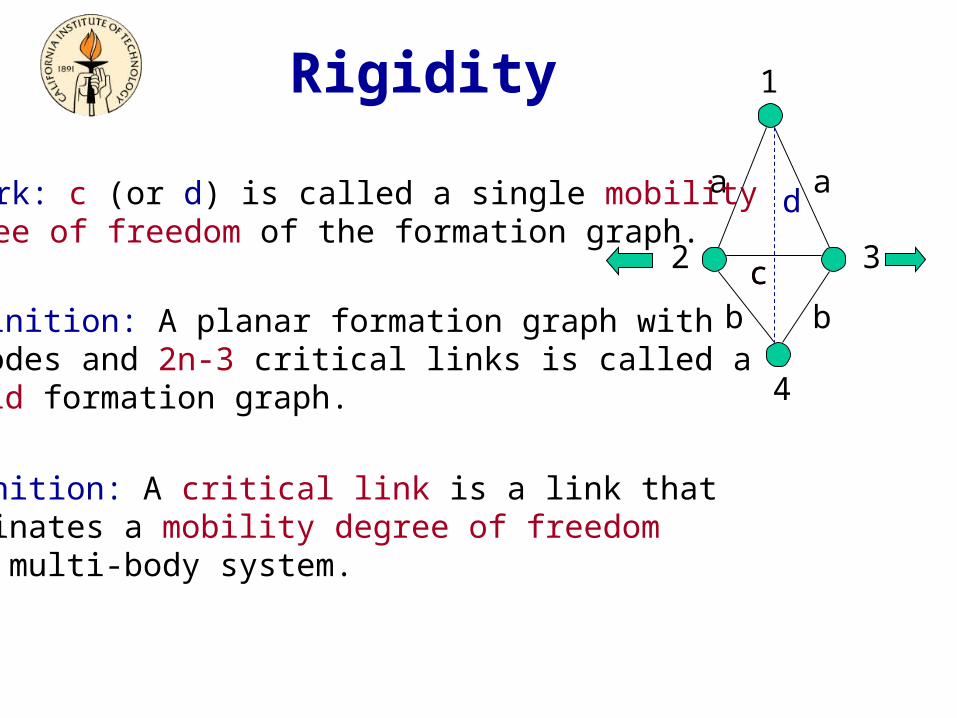
Rigidity
2 3
4
1
Definition: A planar formation graph with n nodes and 2n-3 critical links is called a rigid formation graph.
Definition: A critical link is a link that eliminates a mobility degree of freedom of a multi-body system.
a a
b b
c
dRemark: c (or d) is called a single mobility degree of freedom of the formation graph.
c

Foldability
2 3
4
1
Definition: A rigid formation graph is foldable iff the set of structural constraints associated with the formation graph does not have a unique solution.
Definition: The following non-redundant set of equations are called structural constraints of a formation graph.
a a
b b
c
d
c
: 0ij j i ijq q d
4
Deviation Variable:
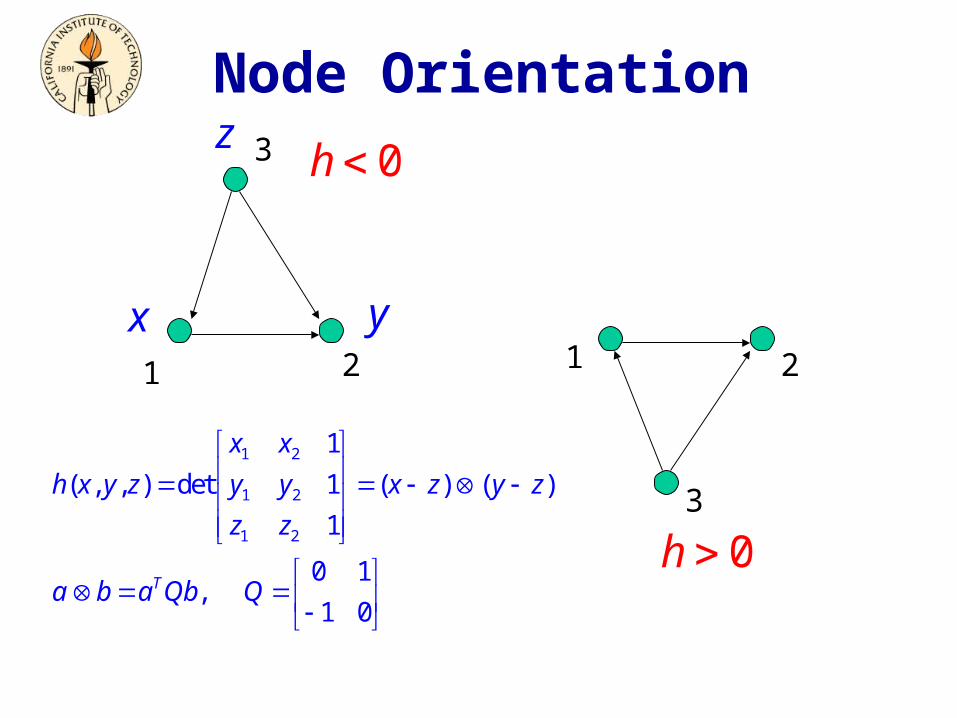
Node Orientation
1 2
3
1 2
3
z
yx
1 2
1 2
1 2
1
( , , ) det 1 ( ) ( )
1
0 1,
1 0T
x x
h x y z y y x z y z
z z
a b a Qb Q
0h
0h
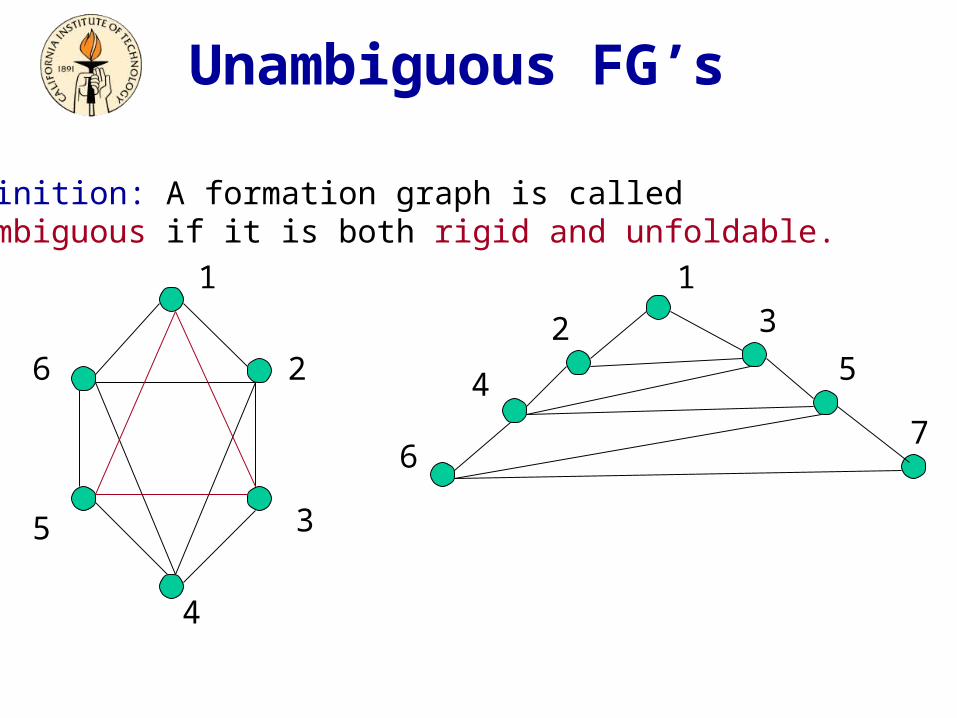
Unambiguous FG’s
Definition: A formation graph is called unambiguous if it is both rigid and unfoldable.
1
2
3
4
5
6
1
2 3
4 5
67
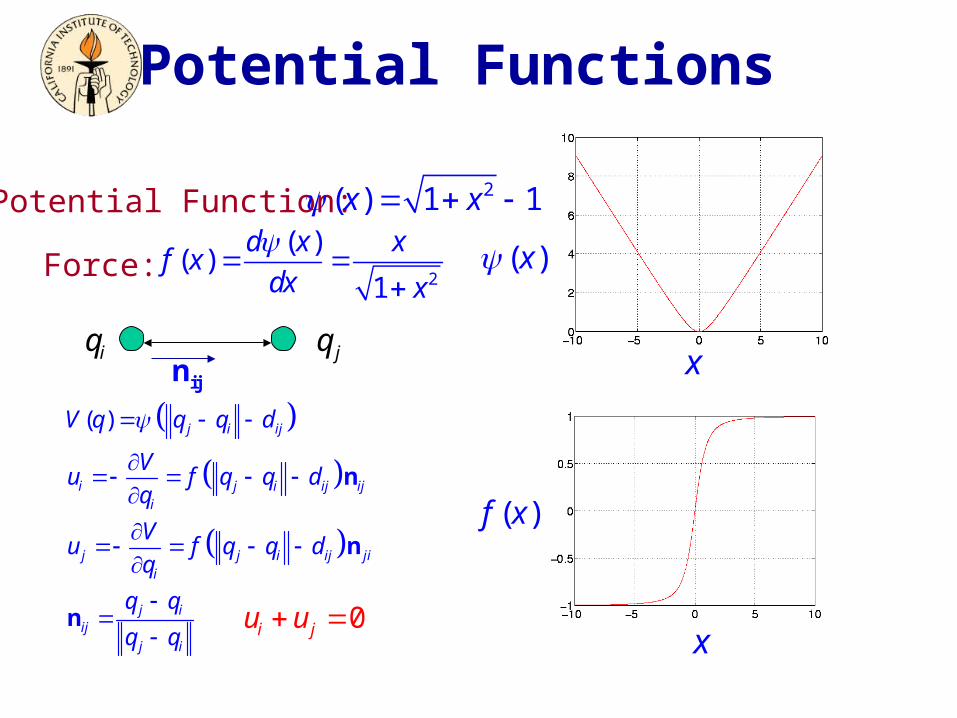
Potential Functions
x
x
( )x
( )f x
Potential Function: 2( ) 1 1x x
Force: 2
( )( )
1
d x xf x
dx x
iq jq
( ) j i ij
i j i ij iji
j j i ij jii
j iij
j i
V q q q d
Vu f q q d
q
Vu f q q d
q
q q
q q
n
n
n 0i ju u
ijn
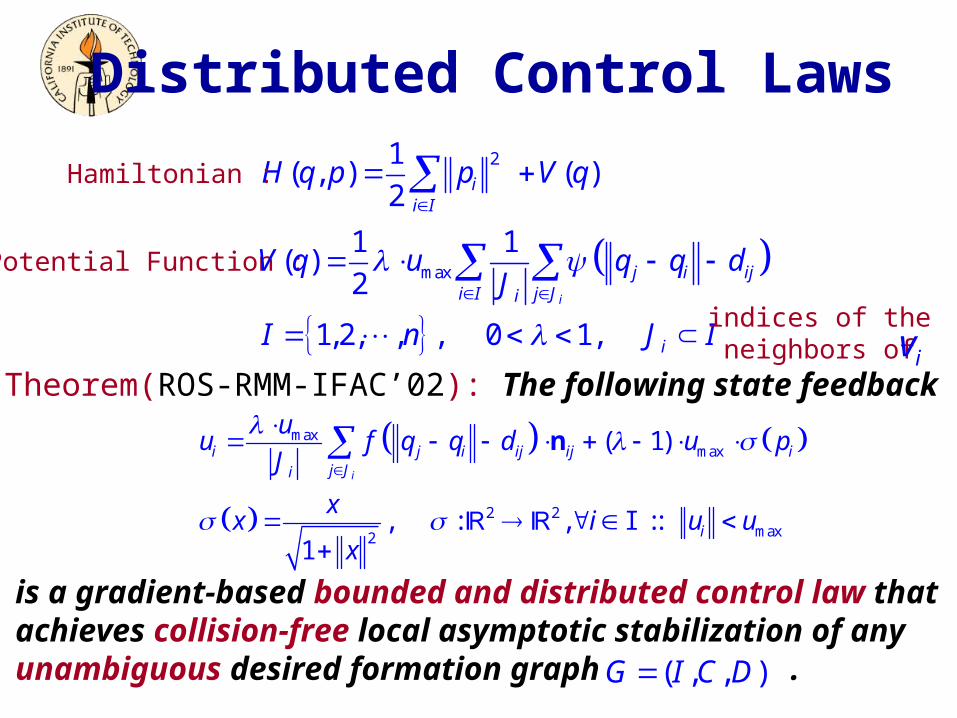
Distributed Control Laws
Potential Function :
2
max
1( , ) ( )
2
1 1( )
2
1,2, , , 0 1,i
ii I
j i iji I j Ji
i
H q p p V q
V q u q q dJ
I n J I
Hamiltonian :
indices of the neighbors of iv
Theorem(ROS-RMM-IFAC’02): The following state feedback
is a gradient-based bounded and distributed control law that achieves collision-free local asymptotic stabilization of any unambiguous desired formation graph .
maxmax
2 2max2
( 1)
, : , :1
i
i j i ij ij ij Ji
i
uu f q q d u p
J
xx i u u
x
n
I :
( , , )G I C D
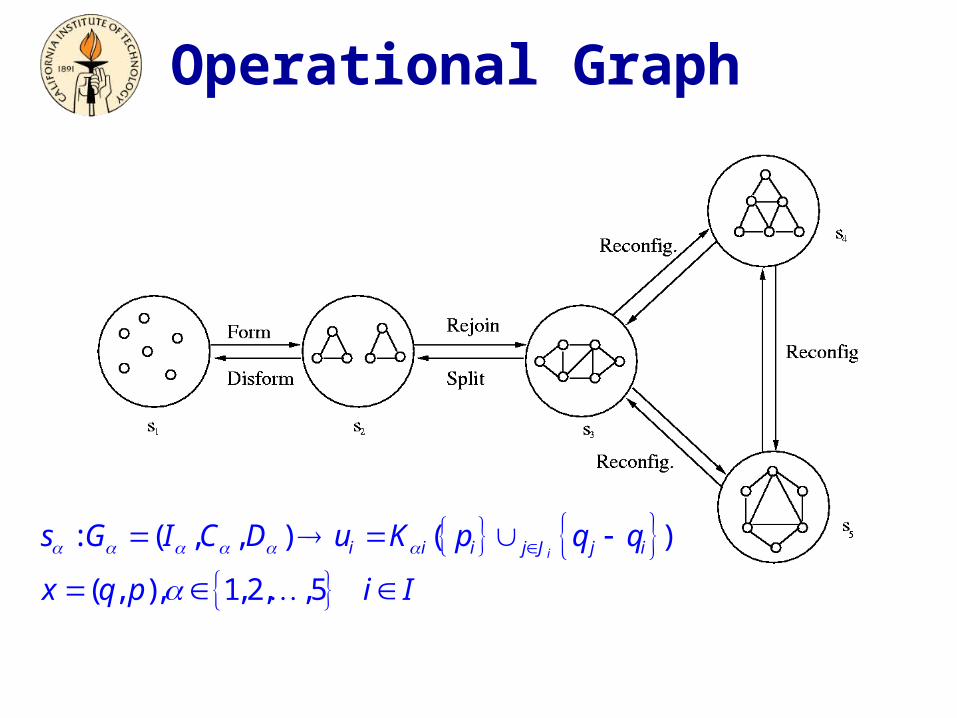
Operational Graph
: ( , , ) ( )
( , ), 1,2, ,5
ii i i j J j is G I C D u K p q q
x q p i I
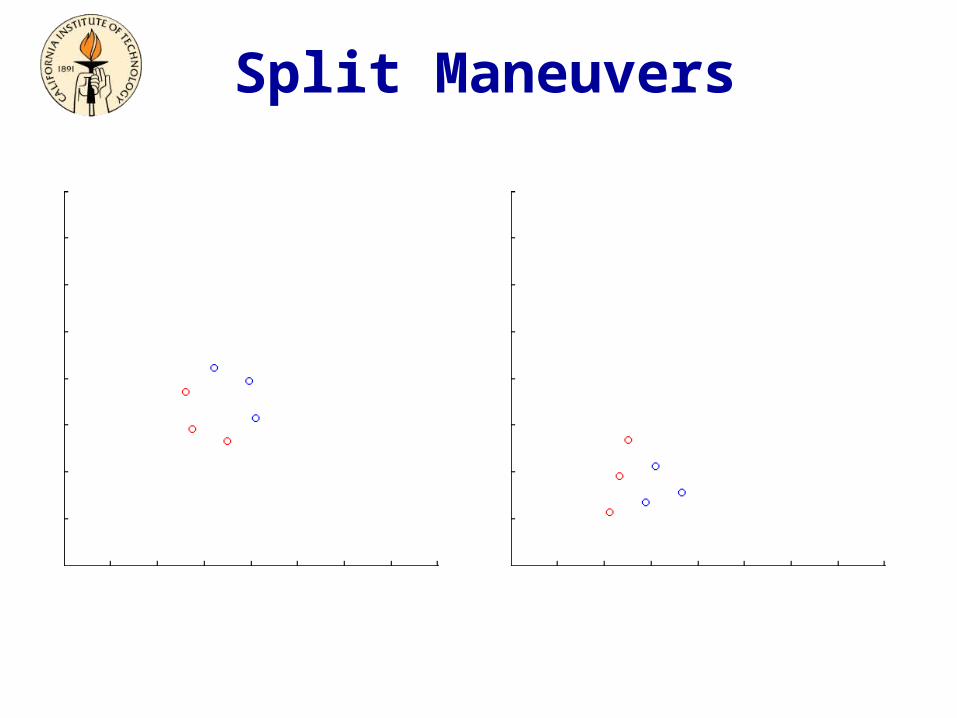
Split Maneuvers
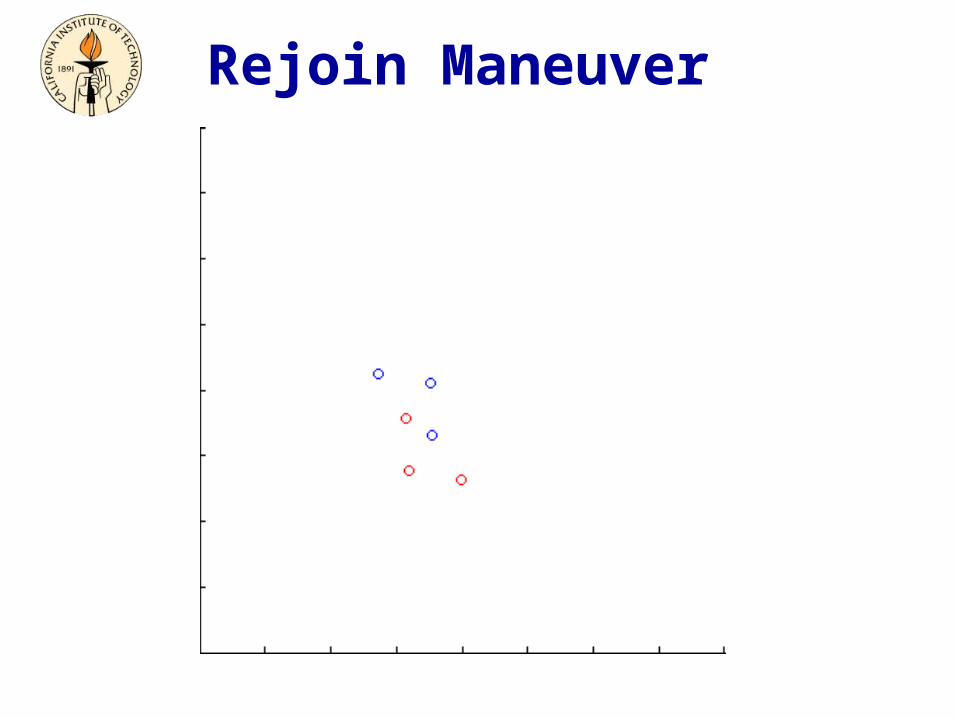
Rejoin Maneuver

Reconfiguration I

Reconfiguration II
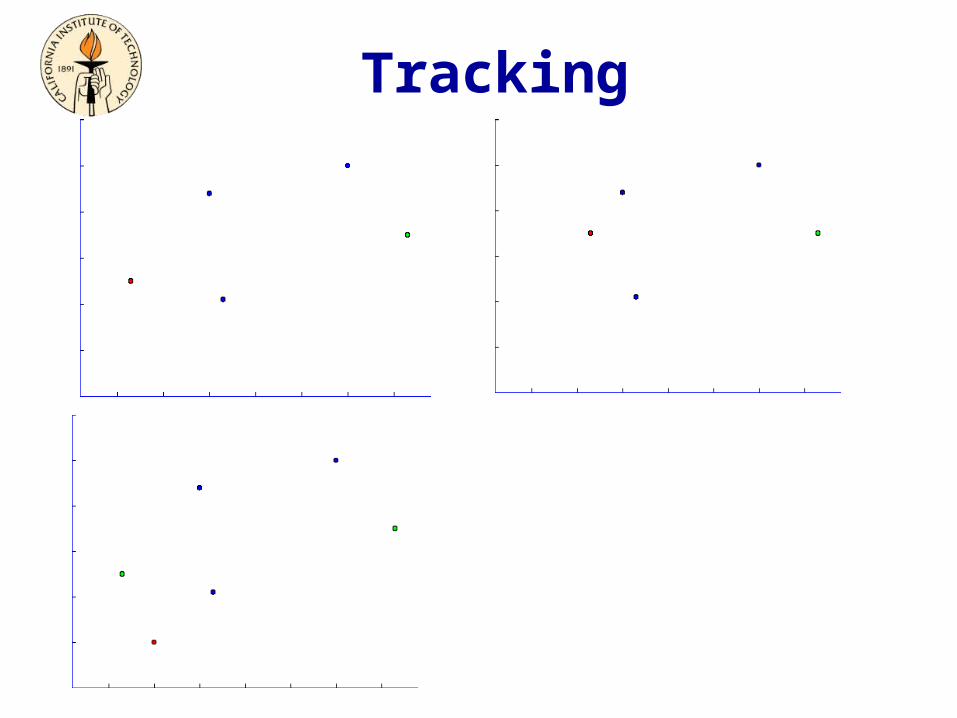
Tracking

Conclusions
• Introducing a framework for formal specification of unambiguous formation graphs of multi-vehicle systems that is compatible with formation control.
• Providing a Lyapunov function and a bounded and distributed state feedback that performs coordinated tasks such as formation stabilization/tracking, split/rejoin, and reconfiguration maneuvers.
• Introducing a Hybrid System that represents split, rejoin, and reconfiguration maneuvers in a unified framework as a discrete-state transition where each discrete-state is an unambiguous formation graph.
Related Documents











