The University of Manchester Research Distributed Agent Consensus-Based Optimal Resource Management for Microgrids DOI: 10.1109/TSTE.2017.2740833 Document Version Accepted author manuscript Link to publication record in Manchester Research Explorer Citation for published version (APA): Zhao, T., & Ding, Z. (2017). Distributed Agent Consensus-Based Optimal Resource Management for Microgrids. IEEE Transactions on Sustainable Energy, 9(1), 443-452. https://doi.org/10.1109/TSTE.2017.2740833 Published in: IEEE Transactions on Sustainable Energy Citing this paper Please note that where the full-text provided on Manchester Research Explorer is the Author Accepted Manuscript or Proof version this may differ from the final Published version. If citing, it is advised that you check and use the publisher's definitive version. General rights Copyright and moral rights for the publications made accessible in the Research Explorer are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. Takedown policy If you believe that this document breaches copyright please refer to the University of Manchester’s Takedown Procedures [http://man.ac.uk/04Y6Bo] or contact [email protected] providing relevant details, so we can investigate your claim. Download date:31. Jan. 2022

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
The University of Manchester Research
Distributed Agent Consensus-Based Optimal ResourceManagement for MicrogridsDOI:10.1109/TSTE.2017.2740833
Document VersionAccepted author manuscript
Link to publication record in Manchester Research Explorer
Citation for published version (APA):Zhao, T., & Ding, Z. (2017). Distributed Agent Consensus-Based Optimal Resource Management for Microgrids.IEEE Transactions on Sustainable Energy, 9(1), 443-452. https://doi.org/10.1109/TSTE.2017.2740833
Published in:IEEE Transactions on Sustainable Energy
Citing this paperPlease note that where the full-text provided on Manchester Research Explorer is the Author Accepted Manuscriptor Proof version this may differ from the final Published version. If citing, it is advised that you check and use thepublisher's definitive version.
General rightsCopyright and moral rights for the publications made accessible in the Research Explorer are retained by theauthors and/or other copyright owners and it is a condition of accessing publications that users recognise andabide by the legal requirements associated with these rights.
Takedown policyIf you believe that this document breaches copyright please refer to the University of Manchester’s TakedownProcedures [http://man.ac.uk/04Y6Bo] or contact [email protected] providingrelevant details, so we can investigate your claim.
Download date:31. Jan. 2022
1
Distributed Agent Consensus-Based OptimalResource Management for Microgrids
Tianqiao Zhao, Zhengtao Ding, Senior Member, IEEE
Abstract—This paper considers the optimal resource manage-ment problem for microgrids. Microgrids provide a promisingapproach to fulfil challenges of the integration of distributedrenewable generations and energy storage systems. However, theresource management in a microgrid encounters the new diffi-culty, i.e. supply-demand imbalance, caused by the intermittenceof renewable sources. Therefore, an optimal solution is proposedto the resource management by enhancing the communicationand coordination under a multi-agent system framework. Anagent is a participant, for instance, the distributed renewablegenerator/energy storage system of the microgrid. With thismulti-agent system, the distributed optimal solution only utilizesthe local information, and interacts with the neighbouring agents.Thus, single-node congestion is avoided since the requirementfor a central control centre is eliminated, and it is robust againstsingle-link/node failures. The analysis will show that the proposedsolution can solve the resource management problem in aninitialization-free manner. Additionally, the proposed strategycan maintain the supply-demand balance under a time-varyingsupply-demand deviation. The simulation studies are carried outfor IEEE 14-bus and 162-bus power systems to validate theeffectiveness of the proposed distributed solution.
Index Terms—Consensus algorithm, resource management,distributed optimization, microgrid, energy storage systems,multi-agent system
I. INTRODUCTION
The intelligent microgrid is a promising solution to integrat-ing various distributed renewable generators (RGs), namelywind turbine (WT) and photovoltaic (PV) power generationunits, and energy storage systems (ESSs) within a distributedsystem to support a flexible and efficient electric network [1].A microgrid should be able to operate in both grid-connectedmode and islanded mode [2]. In the grid-connected mode, amicrogrid can maintain supply-demand balance by interactingwith the main grid [3]. However, in the islanded mode, the mi-crogrid has to balance the supply-demand individually. Due tothe intermittence of WTs and PVs, an islanded microgrid willface new operational and control challenges to the resourcemanagement.
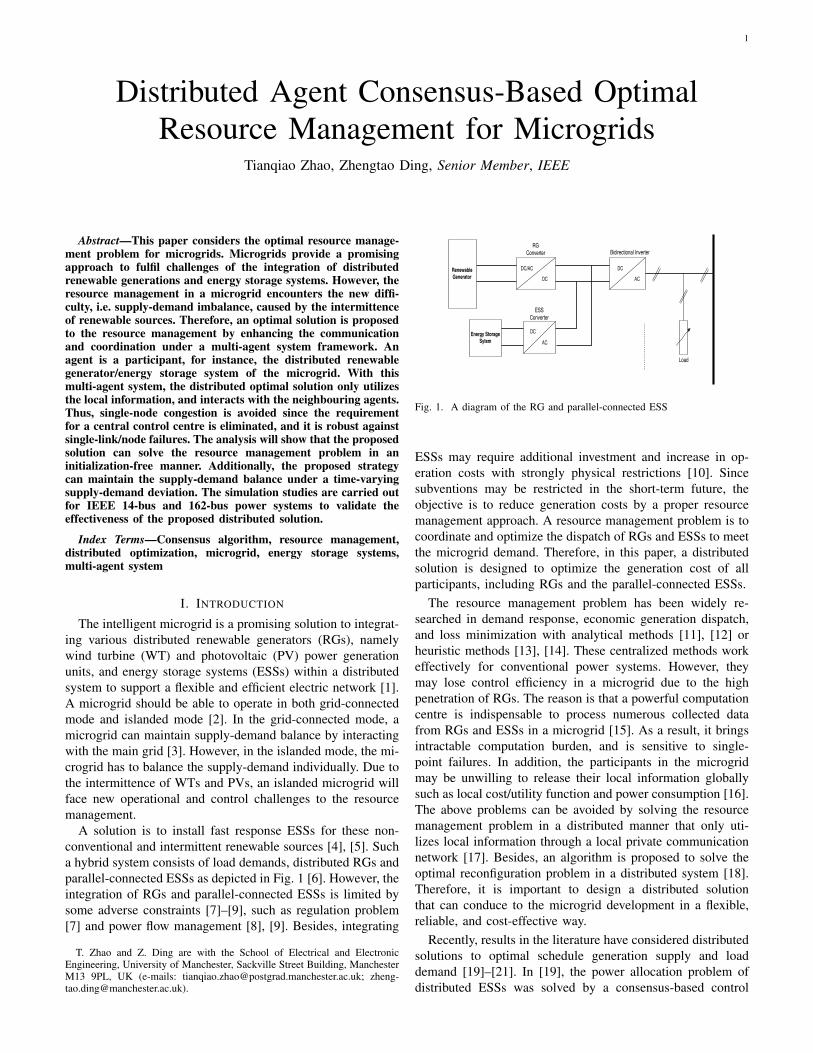
A solution is to install fast response ESSs for these non-conventional and intermittent renewable sources [4], [5]. Sucha hybrid system consists of load demands, distributed RGs andparallel-connected ESSs as depicted in Fig. 1 [6]. However, theintegration of RGs and parallel-connected ESSs is limited bysome adverse constraints [7]–[9], such as regulation problem[7] and power flow management [8], [9]. Besides, integrating
T. Zhao and Z. Ding are with the School of Electrical and ElectronicEngineering, University of Manchester, Sackville Street Building, ManchesterM13 9PL, UK (e-mails: [email protected]; [email protected]).
Fig. 1. A diagram of the RG and parallel-connected ESS
ESSs may require additional investment and increase in op-eration costs with strongly physical restrictions [10]. Sincesubventions may be restricted in the short-term future, theobjective is to reduce generation costs by a proper resourcemanagement approach. A resource management problem is tocoordinate and optimize the dispatch of RGs and ESSs to meetthe microgrid demand. Therefore, in this paper, a distributedsolution is designed to optimize the generation cost of allparticipants, including RGs and the parallel-connected ESSs.
The resource management problem has been widely re-searched in demand response, economic generation dispatch,and loss minimization with analytical methods [11], [12] orheuristic methods [13], [14]. These centralized methods workeffectively for conventional power systems. However, theymay lose control efficiency in a microgrid due to the highpenetration of RGs. The reason is that a powerful computationcentre is indispensable to process numerous collected datafrom RGs and ESSs in a microgrid [15]. As a result, it bringsintractable computation burden, and is sensitive to single-point failures. In addition, the participants in the microgridmay be unwilling to release their local information globallysuch as local cost/utility function and power consumption [16].The above problems can be avoided by solving the resourcemanagement problem in a distributed manner that only uti-lizes local information through a local private communicationnetwork [17]. Besides, an algorithm is proposed to solve theoptimal reconfiguration problem in a distributed system [18].Therefore, it is important to design a distributed solutionthat can conduce to the microgrid development in a flexible,reliable, and cost-effective way.
Recently, results in the literature have considered distributedsolutions to optimal schedule generation supply and loaddemand [19]–[21]. In [19], the power allocation problem ofdistributed ESSs was solved by a consensus-based control
zhengtaoding
Typewritten Text
To appear in IEEE Transactions on Sustainable Energy (Paper TSTE-00920-2016)

2
strategy. An external leader is needed to collect and broad-cast total supply-demand power mismatch, which makes thecontrol strategy not fully distributed, and is sensitive to themeasurement errors of actual power deviations. In [20], adistributed economic operation strategy for a microgrid wasproposed to minimize the economical cost through jointlyscheduling various participants without considering the sin-gle link/node failure. A fully distributed control strategy isproposed in [21]. However, this control strategy relies on aspecific initialization procedure during each update step.
Multi-agent system (MAS)-based strategies [22] have beenapplied to a variety of power system applications, includingload restoration [23], frequency regulation [24] and reactivepower control [25]. However, the MAS-based solutions inthose researches are rule-based designing, and lack of arigorous stability analysis. The existing distributed solution isproposed under the undirected communication network, whichrequires a bi-directional communication network, in stead ofa possible single-directional communication. In contrast, thescheme with directed information flow would have lower com-munication cost [26]. Since the of the smart grid is becominghighly scalable due to the integration of smart meters andcontrollable devices, the scalability of the distributed resourcemanagement will be strengthened by introducing the directedcommunication [27]. Additionally, in a microgrid, althoughthe optimal dispatch problem can run according to the fore-casting information, there may exist set-up errors/mismatchesduring the initialization process. Therefore, a proper designeddistributed that can tackle errors in initialization process willbe desirable and meaningful for promoting the developmentof the smart grid.
To address the above issues, we propose an optimal strategyfor the resource management in a microgrid, which minimizesthe generation cost of all participants in a distributed mannerunder a directed communication network. With the MASframework, each agent only needs to exchange informationwith its neighbours through a directed communication net-work. As a result, the proposed strategy can work in adistributed manner, and the computational and communicationburdens may be reduced by the MAS framework. Besides, byremoving a central coordinator, the directed communicationis more robust against single-point failures as long as thecommunication network remains connected. In this paper,by characterizing the the omega-limit set of the trajecto-ries of our strategy, it shows that the power allocation ofeach RG and parallel-connected ESS can start without thespecified initialization and converge to the optimization pointwhile maintaining the supply-demand balance. Furthermore,to overcome the stochastic nature of renewable generationsand demands, a simulation study is carried out under a time-varying supply-demand deviation that shows the proposedalgorithm converge to the optimal solution while satisfyingthe equality constraint.
The remainder part of the paper is organized as follows.Section II briefly introduces basic notations and preliminaries.Section III formulates the problem to be solved. Section IVproposes a distributed control strategy to the resource man-agement problem. Section V presents the simulation results
and corresponding analysis. Finally, the conclusion is drawnin Section VI.
II. NOTATIONS AND PRELIMINARIES
In this section, we recall some notations and preliminariesthat are used in this paper. For l ∈ R, we denote Hl = {x ∈R | 1T
nx = l}, and H0 = {x ∈ R | 1Tnx = 0}, where 1n =
[1, 1 . . . , 1]T ∈ Rn. Also, for B0 ∈ Rn, B0 = [b10, . . . , bi0]T ,
where bi0 6= 0 denotes ith agent can obtain the information ofthe total power demand; bi0 = 0 otherwise; and 1TnB0 = 1.
Graph Theory
Following [28], [29], we present some basic notions ofa directed graph. A directed graph G = (V, E), whereV = {ν1,. . . , νn} denotes the node set and E ∈ V × V isthe edge set. If (νi, νj) ∈ E means node νi is a neighbour ofnode νj . A directed graph contains a directed spanning treeif there exists a root node that has directed paths to all othernodes. A directed graph is strongly connected if there exists adirected path that connects any pair of vertices. For a directedgraph G, its adjacency matrix A = [aij ] in Rn×n is definedby aii = 0, aij = 1 if (νj , νi) ∈ E and aij = 0 otherwise.A weighted graph G = (V, E , A) consists of a digraph (V ,E) and an adjacency matrix A ∈ Rn×n
≥0 with aij > 0 if andonly if (i, j) ∈ E . The weighted in-degree and out-degree ofi are defined as din(i) =
∑nj=1 aij and dout(i) =
∑nj=1 aji,
respectively. The Laplacian matrix L = [Lij ] ∈ Rn×n asso-ciates with G is defined as Lii =
∑j 6=i aij and Lij = −aij ,
i 6= j. G is defined as weight-balanced if dout(ν) = din(ν),for all ν ∈ V iff 1TnL = 0 iff L+LT is positive semi-definite.If G is strong connected and weight-balanced, zero is a simpleeigenvalue zero of L+ LT . In this case, there is a fact that
xT (L+ LT )x ≥ λ2(L+ LT )
∥∥∥∥x− 1
n1Tn1nx
∥∥∥∥2 , (1)
where λ2(L+LT ) is the smallest non-zero eigenvalue of L+LT .
III. PROBLEM FORMULATION
The resource management of RGs is formulated to min-imize the generation cost while satisfies the supply-demandconstraint and the RGs’ constraints. In this paper, the objectivefunction considering both RGs and parallel-connected ESSscosts is constructed as
Min C(PR, PE) =∑
i∈NRG
fi(PR,i(t)) +∑
j∈NESS
gj(PE,j(t))
(2)where NRG and NESS are the sets of RGs and ESSs, re-spectively. fi(PR,i(t)) and gj(PE,j(t)) are the cost functionfor ith RG and jth ESS, for i ∈ NRG and j ∈ NESS.PR,i(t) and PE,j(t) are the output power of ith RG andjth ESS. Moreover, define Ck(PR,i, PE,j) = fi(PR,i(t)) +gj(PE,j(t)) and C(PR, PE) =
∑k∈N Ck(PR,i, PE,j)
with PR = [PR,i(t), . . . , PR,n(t)]T ∈ Rn and PE =
[PE,j(t), . . . , PR,n(t)]T ∈ Rn.

3
In this paper, the RG’s objective of economic dispatch is tominimize the curtailment of renewable energy in a microgrid.To this end, the cost function of ith RG is expressed as
fi(PR,i(t)) = aiPR,i(t)2 + biPR,i(t) + ci (3)
where PmaxR,i is the predicted maximum power generation
capacity of ith RG, and ai = εi2Pmax
, bi = −εi, and ci = εiPmax2 ,
respectively. A trade-off factor εi is introduced to indicatethe between the capacity and generation cost, which can beselected according to the capacity required, the installationand other costs known as ’balance of system cost’ for eachtype of renewable sources [20], [30]. The formulated objectivefunction (3) has a similar format to the cost function in[31], [32] with different the parameter setting. Besides, (3)indicates that the lower power generation cost is realized whenthe deviation of actual output power PR,i(t) between Pmax
R,i
is minimized. Hence, the minimization of renewable energycurtailment can be derived by minimizing generation costof RGs [33]. Additional, the following condition is achievedwhen the incremental rate of each RG is equally, i.e.,
PR,i(t)
PmaxR,i
= · · · = PR,k(t)
PmaxR,k
(4)
which indicates the equal power sharing among RGs.Following [34], a convex quadratic cost function is adopted
to represent the power loss of ESSs during the charg-ing/discharging process, i.e.,
gj(PE,j(t)) = ajPE,j(t)2 + bjPE,j(t) + cj (5)
where aj , bj and cj are the non-negative parameters of jthESS, which can be selected in terms of the Amoroso andCappuccino’s experimental results [35].
A. Constraints
The physical limitations on the operation of the studiedsystem are presented as follows:
1) Global Constraint: Since the change of frequency withina microgrid is mainly affected by the supply-demand mis-match, the supply-demand balance should be maintained toensure the stability of the microgrid. To this end, the activepower balance in a microgird can be expressed as
PD(t) =∑
i∈NRG
PR,i(t) +∑
j∈NESS
PE,j(t) (6)
where PD(t) is the total load demand.2) Local Constraints: The actual output power of each RG
and ESS should belong to a feasible range, i.e.,
PminR,i ≤ PR,i ≤ Pmax
R,i
PminE,j ≤ PE,j ≤ Pmax
E,j (7)
where PminR,i and Pmax
R,i are the lower and upper bound for ithRG; Pmin
E,j and PmaxE,j are the lower and upper bound for jth
ESS.
B. Objective Function
Considering both the global constraints (6) and local con-straints (7), the resource management problem is formulatedas
Min C(PR, PE)
subject to
PD(t) =∑
i∈NRG
PR,i(t) +∑
j∈NESS
PE,j(t),
PminR,i <PR,i < Pmax
R,i , for i ∈ NRG
PminE,j <PE,j < Pmax
E,j , for j ∈ NESS . (8)
Remark 3.1: In the formulation of the objective function,the cost function (8) is used to reflect the operation cost ofthe islanded microgrid. The formulated cost function consistsof a generation cost of each RG and a charging/dischargingcost of each BESS. The generation cost of RGs is formulatedto minimize the curtailment of renewable energy when theminimized generation cost is achieved. In the meantime, thecost function of BESSs represents the power losses during thecharging/discharging process as indicated in [34], which max-imizes the actual power output of BESSs while minimizingthe power losses. For this reason, the total operation cost willbe minimized by the proposed cost function.
The feasibility set and the solution set of the resource man-agement problem is denoted by FRM and F∗RM , respectively.Note that F∗RM is compact since FRM is compact. DenotePE = [PE,1, . . . , PE,n] ∈ Rn and PR = [PR,1, . . . , PR,n] ∈Rn, respectively. A useful Lemma in [36] is introduced asfollows
Lemma 3.1: Since Ck(PR,i, CE,j) is convex, locallyLipschitz, and continuously differentiable, the optimizationproblem has a solution (P ∗R, P
∗E) ∈ Rn if and only if
∃σ ∈ R such that σ1n ∈ ∂PRC(PR, PE), and σ1n ∈∂PEC(PR, PE), and 1nP ∗R + 1nP
∗E = PD.
IV. DISTRIBUTED SOLUTION OF DYNAMIC ECONOMICDISPATCH
The formulated problem (8) is a convex optimization prob-lem with both equality and inequality constraints. Traditionalcentralized strategies may have some challenges, such ascomputation burden and non-timely response. In this section,we develop a distributed cooperative strategy for the resourcemanagement problem to overcome these challenges, whichonly utilizes locally available information and interacts withits adjacent agents.
A. Distributed Algorithm Design
Inspired by the dynamic average consensus estimationmethod proposed in [37], a distributed solution is developedfor the resource management, which allows the power alloca-

4
tion of RGs and ESSs to start from any initial condition. Thedistributed algorithm is formulated as
PR,i =−∑
h∈NRG
aih(∂PR,iCi(PR,i, PE,j)
− ∂PR,hCh(PR,h, PE,j)), (9a)
PE,j =−∑
k∈NESS
ajk(∂PE,jCi(PR,i, PE,j)
− ∂PE,kCk(PR,i, PE,k)) + γxj , (9b)xj =− β(xj − (bi0PD − PE,j − PR,i))
− α∑
k∈NESS
ajk(xj − xk)−∑
k∈NESS
ajk(ηj − ηk), (9c)
ηj =αβxj , (9d)
where α, β, γ ∈ R>0 are the parameters to be designed. NRGand NESS denotes the neighbour set of ith RG and jth ESS,respectively. In addition, xj is designed to track the differencebetween supply and demand, PD − 1TnPE − 1T
nPR. Both RGsand ESSs are deployed through a Laplacian-gradient algorithmto explore the minimization of the generation cost. Meanwhile,we introduce a feedback element, γxj for jth ESS to meet thesupply-demand equality condition.
Remark 4.1: Note that the renewable generation may notbe considered as dispatchable if they are controlled in max-imum peak power tracking (MPPT) mode because of theirintermittent and irregular nature. As a result, RGs are notused to compensate the supply-demand mismatch. Thus, onlyESSs are deployed to maintain the supply-demand balancein the control design. The feedback term is only introducedfor jth ESS to satisfy the supply-demand equality condition.Meanwhile, ith RG only implements (9b) to explore theminimization of its own generation cost.
B. Convergence Analysis
The algorithm is rewritten in a compact form for conver-gence analysis as
PE = −LE∂PEC(PR, PE) + γx, (10a)
PR = −LR∂PRC(PR, PE), (10b)x = −αLEx− β(x− (B0PD − PE − PR))− LEη, (10c)η = αβx, (10d)
where x, η are the column vectors containing xi, and ηi,respectively. LE and LR denote the corresponding Laplacianmatrix of network connections of ESSs and RGs, respectively.
Let Pk = PR,i + PE,j , and P = [P1, . . . , Pn] ∈ Rn. Theω-limit set of the trajectories of (9) under any initial conditionin Rn×Rn×Rn is first characterized. Then, with T = Rn×Rn ×Rn and T0 = HPD ×H0 ×H0, the following lemma isintroduced.
Lemma 4.1: The ω-limit set of any trajectory of (10) withany initial condition in (Pk,0, x0, η0) ∈ T is contained in T0.
Proof: Defining φ(t) = 1TnP − PD, one has
φ(t) = 1Tnγx(t), (11)
and
φ(t) = 1Tnγx(t)= −1Tnβγx(t) + 1Tnβγ(x− (B0PD − P ))= −βγφ(t)− βφ(t). (12)
The system can be rewritten as a linear system z = Az withz = [z1, z2]
T , and z1 = φ(t), z2 = φ(t). The system matrix is
A =
[0 1
−βγ −β
].
Let R ∈ R2×2 be
R =1
2γβ2
[β2 + βγ + (βγ)2 β
β 1 + βγ
], (13)
which satisfies ATR+RA+ I = 0. Define Vz = zTRz as aLyapunov function candidate, and the derivative of Vz is
Vz = −zT z. (14)
Therefore, it can be deduced that (φ(t); φ) → 0. Further-more, φ = 0 implies that 1TnPE(t) + 1TnPR(t) → PD and1Tnx(t)→ 0. Note that 1Tn η = 0, as 1Tnx(t)→ 0.Remark 4.2: The proof of Lemma 4.1 establishes the
exponential stability of the demand mismatch dynamics. Withthe Theorem 5.4 in [38], it can ensure the input-to-state stabil-ity(ISS). Thus it is robust to arbitrary bounded perturbations.Additionally, from the Lyapunov equation Vz = zTRz, itfollows Theorem 4.6 in [38] that gives the convergence rateas ∥∥x(t)∥∥ ≤√λmax(R)
λmin(R)e
−1λmax(R)
∥∥x(0)∥∥ . (15)
The demand mismatch dynamics depends on the topology ofthe communication network. However, as indicated in (15), theconvergence rate does not directly depend on the knowledgeof the Laplacian matrix.
We are now ready to complete the convergence analysis. Byapplying (10), the trajectories of actual output power of RGsand their parallel-connected ESSs converge to the solution ofthe optimization problem.
Theorem 4.1: The trajectories of (10) converge to thesolution of the optimal charging problem if α, β, γ ∈ R>0
satisfy the following conditions, i.e.,
βλmax(LTRLR)
2λ2(LR + LTR)≥ 0, (16)
andγ
αβλ2(LE + LTE)
+βλmax(LT
ELE)
2< λ2(LE + LT
E). (17)
Proof: A change of coordinates is performed to shiftthe equilibrium point of (10) to the origin, i.e., η = LE −β(B0PD − PE − PR). Then, the dynamics (10) can betransformed as
PE = −LEξ1 + γx,
PR = −LRξ2,
x = −αLEx− β(x− (B0PD − PE − PR))− LEη,
˙η = αβLEx+ γβx− βLEξ1 − βLRξ2, (18)

5
with ξ1 ∈ ∂PEC(PR, PE) and ξ2 ∈ ∂PRC(PR, PE).Next step is to prove that the trajectories of (10) converge
to the optimal solution of the formulated problem in the newcoordinates.
Consider a candidate Lyapunov function
V = C(PR, PE) +1
2γβ‖θ1‖2 +
1
2‖θ2‖2 . (19)
where an additional transformation is introduced to moreeasily identify the candidate Lyapunov function, with θ1 = xand θ2 = βx+ η.
Then the time derivative of (19) along the trajectories of(10) is given as
V = −ξT1 LEξ1 + γξT1 θ1 − ξT2 LRξ2 − γαβθT1 LEθ1
− βθT2 θ2 − βθT2 LEξ1 − βθT2 LRξ2
= −1
2ξT1 (LE + LT
E)ξ1 + γξT1 θ1 −1
2ξT2 (LR + LT
R)ξ2
− 1
2γαβθT1 (LE + LT
E)θ1 − β‖θ2‖2 − βθT2 LEξ1
− βθT2 LRξ2 (20)
Since the directed graph G is strongly connected and weight-balanced with the fact that 1Tnθ1 = 0 for (PE , PR, θ1, θ2) ∈T0, one has
V ≤ −1
2λ2(LE + LT
E)
∥∥∥∥ξ1 − 1
n1Tn1nξ1
∥∥∥∥2+ γ(ξ1 −
1
n1Tn1nξ1)T θ1
− 1
2λ2(LR + LT
R)
∥∥∥∥ξ2 − 1
n1Tn1nξ2
∥∥∥∥2 − β‖θ2‖2− 1
2γαβλ2(LE + LT
E)‖θ1‖2 − βθT2 LE(ξ1 −
1
n1Tn1nξ1)
− βθT2 LR(ξ2 −1
n1Tn1nξ2) (21)
Defining ψ1 = ξ1− 1n (1
Tn1nξ1), ψ2 = ξ2− 1
n (1Tn1nξ2) and
υT1 = [ψT1 , θ
T1 , θ
T2 ], υ
T2 = [ψT
2 , θT2 ], we have
V ≤ υT1 J1υ1 − υT2 J2υ2, (22)
where
J1 =
[− 1
2λ2(LE + LTE)In MT
12
M12 M22
],
with MT12 =
[12γIn − 1
2βLTE
]. and furthermore, M22 =[
− 12αβγλ2(LE + LT
E)In 0
0 −βIn
]and
J2 =
[− 1
2λ2(LR + LTR)In − 1
2βLTR
− 12βLR 0
].
Resorting to the Schur complement, J1 is negative definiteif
−1
2λ2(LE + LT
E)In +γ
2αβλ2(LE + LTE)In +
β
4LTELE
is negative definite, and J2 is positive definite if
βλmax(LTRLR)
2λ2(LR + LTR)
(23)
is positive definite, respectively. Furthermore, we can concludethat V ≤ 0 by applying (17) and (16). Hence, with theapplication of LaSalle Invariance principle, we deduce thatV = 0 iff ψ1 = ψ2 = θ1 = θ2 = 0 , which implies that∂PEC(PR, PE) ∈ span{1n} and ∂PRC(PR, PE) ∈ span{1n}.Recalling the Lemma 4.1 and the characterization of optimiz-ers in Lemma 3.1, it indicates (P ∗E , P
∗R) is a solution of the
optimization problem.Remark 4.3: The local inequality constraints are taken into
account by applying additional projection operations to eachRG and ESSs. As shown in the literatures [39], [40], theprojection operation does not affect the convergence analysisof the distributed optimal strategy.
Remark 4.4: The operation limits of the power network,such as voltage and line flow limits, could be able to includedin the proposed algorithm with applying the projection method,which may lead to different optimization results. Additionally,the proposed method can also deal with the model of thetransmission loss in [41], which assumes each agent couldestimate the power loss of the line adjacent to it. With theavailable estimation value, each agent could add this value tothe load quantity, which would lead the network to discover anew optimization result that considers the power loss.
Algorithm 1 DISTRIBUTED OPTIMAL CHARGING CONTROL ALGORITHM
Initialization:For i ∈ {1, . . . , n} j ∈ {1, . . . , n}PR,i = PR,i(0), PE,j = PE,j(0) xi = xi(0), ηi = ηi(0)
Consensus Algorithm:Select α, β, γ ∈ R>0
Check If variables satisfy the inequality (16) and (17) inTheorem 4.1,{
Yes, Flag = 1→ ContinueNo, Flag = 0→ Go back to Select
(24)
CoordinationRG i and ESS j communicate with its adjacent agents,and update (PE,j , , PR,i, xj , ηj) according to (10a)-(10d) inSection IV.End if Each participant achieves the optimal operation.
C. Algorithm Implementation
The proposed algorithm can be implemented in a MASmanner, which regards each participant as an agent in themicrogrid. A step-by-step algorithm for each agent is shown inAlgorithm 1. Each agent equips with two level controls, i.e. toplevel control and bottom level control as shown in Fig. 2. Asindicated in Fig.2, each agent employs both top level controland bottom level control. Since the proposed algorithm isimplemented based on the MAS framework, each agent is ableto exchange information with its neighbours to complete thedetermined objective. The proposed algorithm is implementedin the top level to generate the output reference for bottomlevel control based on the information from both the localmeasurement and its neighbour’s measurement. The proposedalgorithm can guarantee the output power reference converge
6
Fig. 2. General operation diagram of an agent.
to the optimal solution as long as there exist an optimalpoint and communication network is connected. After thereference is generated, the bottom level control will implementthe output power reference tracking of each agent. Since thecommunication network could be independent of the powernetwork [42], a cost-effective communication network couldbe formed based on the location, convenience of a practicalmicrogrid. While the output power reference is generated,bottom level control is then implemented to control each agentto track this reference.
V. SIMULATION RESULTS AND ANALYSIS
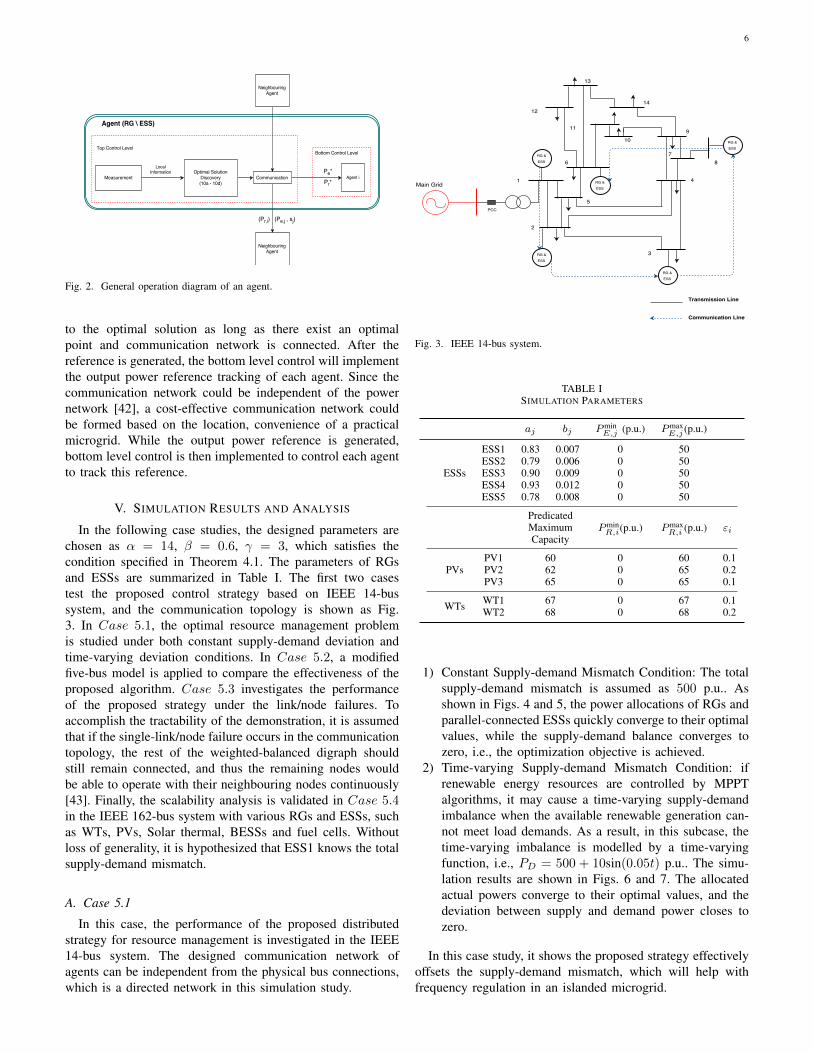
In the following case studies, the designed parameters arechosen as α = 14, β = 0.6, γ = 3, which satisfies thecondition specified in Theorem 4.1. The parameters of RGsand ESSs are summarized in Table I. The first two casestest the proposed control strategy based on IEEE 14-bussystem, and the communication topology is shown as Fig.3. In Case 5.1, the optimal resource management problemis studied under both constant supply-demand deviation andtime-varying deviation conditions. In Case 5.2, a modifiedfive-bus model is applied to compare the effectiveness of theproposed algorithm. Case 5.3 investigates the performanceof the proposed strategy under the link/node failures. Toaccomplish the tractability of the demonstration, it is assumedthat if the single-link/node failure occurs in the communicationtopology, the rest of the weighted-balanced digraph shouldstill remain connected, and thus the remaining nodes wouldbe able to operate with their neighbouring nodes continuously[43]. Finally, the scalability analysis is validated in Case 5.4in the IEEE 162-bus system with various RGs and ESSs, suchas WTs, PVs, Solar thermal, BESSs and fuel cells. Withoutloss of generality, it is hypothesized that ESS1 knows the totalsupply-demand mismatch.
A. Case 5.1
In this case, the performance of the proposed distributedstrategy for resource management is investigated in the IEEE14-bus system. The designed communication network ofagents can be independent from the physical bus connections,which is a directed network in this simulation study.
Fig. 3. IEEE 14-bus system.
TABLE ISIMULATION PARAMETERS
aj bj PminE,j (p.u.) Pmax
E,j (p.u.)
ESSs
ESS1 0.83 0.007 0 50ESS2 0.79 0.006 0 50ESS3 0.90 0.009 0 50ESS4 0.93 0.012 0 50ESS5 0.78 0.008 0 50
PredicatedMaximumCapacity
PminR,i(p.u.) Pmax
R,i (p.u.) εi
PVsPV1 60 0 60 0.1PV2 62 0 65 0.2PV3 65 0 65 0.1
WTs WT1 67 0 67 0.1WT2 68 0 68 0.2
1) Constant Supply-demand Mismatch Condition: The totalsupply-demand mismatch is assumed as 500 p.u.. Asshown in Figs. 4 and 5, the power allocations of RGs andparallel-connected ESSs quickly converge to their optimalvalues, while the supply-demand balance converges tozero, i.e., the optimization objective is achieved.
2) Time-varying Supply-demand Mismatch Condition: ifrenewable energy resources are controlled by MPPTalgorithms, it may cause a time-varying supply-demandimbalance when the available renewable generation can-not meet load demands. As a result, in this subcase, thetime-varying imbalance is modelled by a time-varyingfunction, i.e., PD = 500 + 10sin(0.05t) p.u.. The simu-lation results are shown in Figs. 6 and 7. The allocatedactual powers converge to their optimal values, and thedeviation between supply and demand power closes tozero.
In this case study, it shows the proposed strategy effectivelyoffsets the supply-demand mismatch, which will help withfrequency regulation in an islanded microgrid.
7
0 5 10 15
Time (s)
0
10
20
30
40
50
60
70P
ow
er
(p.u
.)
ESS1 ESS2 ESS3 ESS4 ESS5 PV1 PV2 PV3 WT1 WT2
Fig. 4. The actual output power of RGs and ESSs
0 5 10 15
Time (s)
-10
0
10
20
30
40
50
60
70
80
90
Pow
er
(p.u
.)
Pd
Fig. 5. The supply-demand mismatch update
B. Case 5.2
In this simulation study, the proposed algorithm is appliedto a five-bus system in [39] by replacing the synchronousgenerator with a WT with a parallel-connected ESS in adirected communication network. The parameters of RGs andESSs are selected according to [39]. The algorithm proposedin [39] is adopted in a network with bi-directional linesfor agent’s communication. As a result, the algorithm maylose its effectiveness if one of the bi-directional line breaks
0 5 10 15
Time (s)
10
20
30
40
50
60
70
Pow
er
(p.u
.)
ESS1 ESS2 ESS3 ESS4 ESS5 PV1 PV2 PV3 WT1 WT2
Fig. 6. The actual output power of RGs and ESSs
0 5 10 15 20 25 30 35 40
Time (s)
-10
0
10
20
30
40
50
60
70
80
Pow
er
(p.u
.)
Pd
Fig. 7. The supply-demand mismatch update
0 5 10 15
Time (s)
0
10
20
30
40
50
60
Po
we
r (k
W)
ESS1 ESS2 ESS3 ESS4 ESS5 PV1 PV2 WT1 WT2 WT3
Fig. 8. The actual output power of RGs and ESSs
down. Instead of using bi-directional communication lines,our proposed algorithm can work under the directed graphthat only needs directed communication lines, and the resultsare shown in Fig. 8 and Fig. 9. As the results shown, thepower allocations of RGs and parallel-connected ESSs quicklyconverge to their optimal values, while the mismatch betweensupply and demand converges to zero, i.e., the optimizationobjective is achieved for this case.
C. Case 5.3
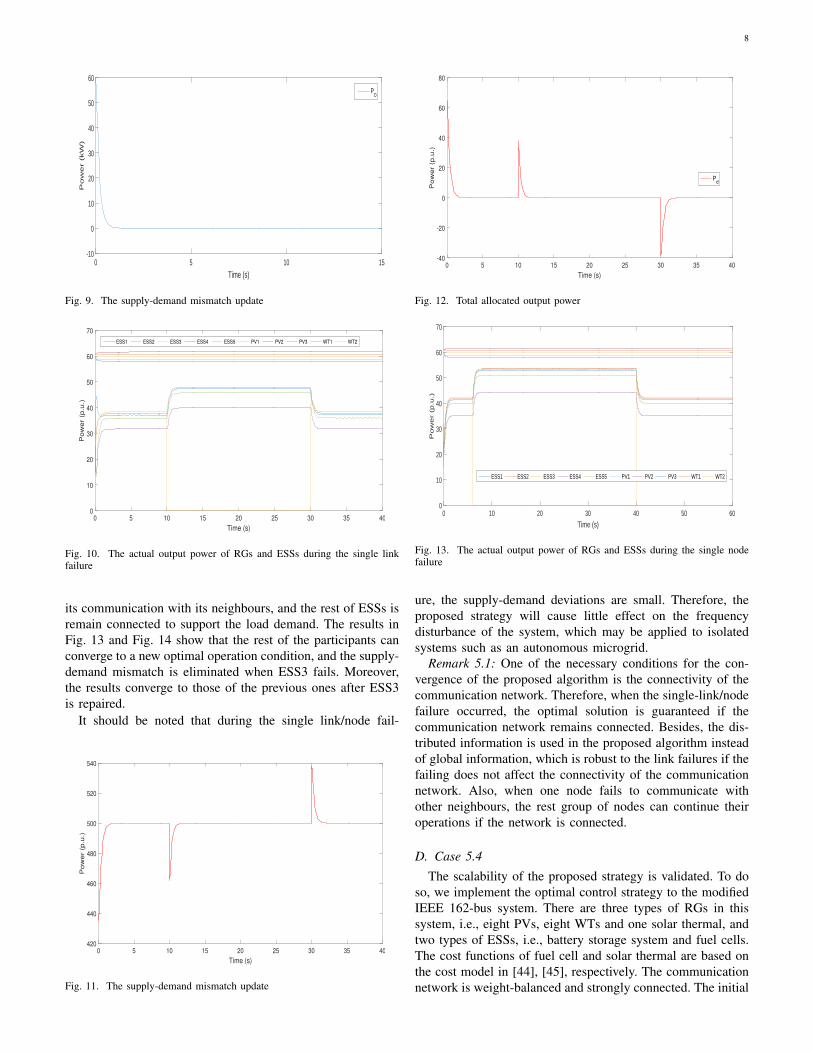
The robustness of single link/node failure is investigated inthis case. In the first subcase, it is assumed that a breakdownof the transmission line for ESS3 at 10s, and it still cancommunicate with its neighbours. Because RGs are not used totackle the demand mismatch, the rest of ESSs has to undertakethe supply-demand balance in a fast response time. At 30s, theemergency line is employed, and hence ESS3 is plugged-in tosupport the load demand. The results are shown in Figs. 10- 12. After ESS3 is pluged-out, the power allocations of allparticipants converge to the new optimal values. Further, thesupply-demand mismatch can be handled by the rest of ESSs.When ESS3 is connected again, all the results converge tothose of the previous ones.
Next, the second subcase considers when ESS3 fails tooperate at 6s and recovers at 40s. Upon failures, ESS3 loses
8
0 5 10 15
Time (s)
-10
0
10
20
30
40
50
60P
ow
er
(kW
)
PD
Fig. 9. The supply-demand mismatch update
0 5 10 15 20 25 30 35 40
Time (s)
0
10
20
30
40
50
60
70
Pow
er
(p.u
.)
ESS1 ESS2 ESS3 ESS4 ESS5 PV1 PV2 PV3 WT1 WT2
Fig. 10. The actual output power of RGs and ESSs during the single linkfailure
its communication with its neighbours, and the rest of ESSs isremain connected to support the load demand. The results inFig. 13 and Fig. 14 show that the rest of the participants canconverge to a new optimal operation condition, and the supply-demand mismatch is eliminated when ESS3 fails. Moreover,the results converge to those of the previous ones after ESS3is repaired.
It should be noted that during the single link/node fail-
0 5 10 15 20 25 30 35 40
Time (s)
420
440
460
480
500
520
540
Pow
er
(p.u
.)
Fig. 11. The supply-demand mismatch update
0 5 10 15 20 25 30 35 40
Time (s)
-40
-20
0
20
40
60
80
Po
we
r (p
.u.)
Pd
Fig. 12. Total allocated output power
0 10 20 30 40 50 60
Time (s)
0
10
20
30
40
50
60
70
Po
we
r (p
.u.)
ESS1 ESS2 ESS3 ESS4 ESS5 PV1 PV2 PV3 WT1 WT2
Fig. 13. The actual output power of RGs and ESSs during the single nodefailure
ure, the supply-demand deviations are small. Therefore, theproposed strategy will cause little effect on the frequencydisturbance of the system, which may be applied to isolatedsystems such as an autonomous microgrid.
Remark 5.1: One of the necessary conditions for the con-vergence of the proposed algorithm is the connectivity of thecommunication network. Therefore, when the single-link/nodefailure occurred, the optimal solution is guaranteed if thecommunication network remains connected. Besides, the dis-tributed information is used in the proposed algorithm insteadof global information, which is robust to the link failures if thefailing does not affect the connectivity of the communicationnetwork. Also, when one node fails to communicate withother neighbours, the rest group of nodes can continue theiroperations if the network is connected.
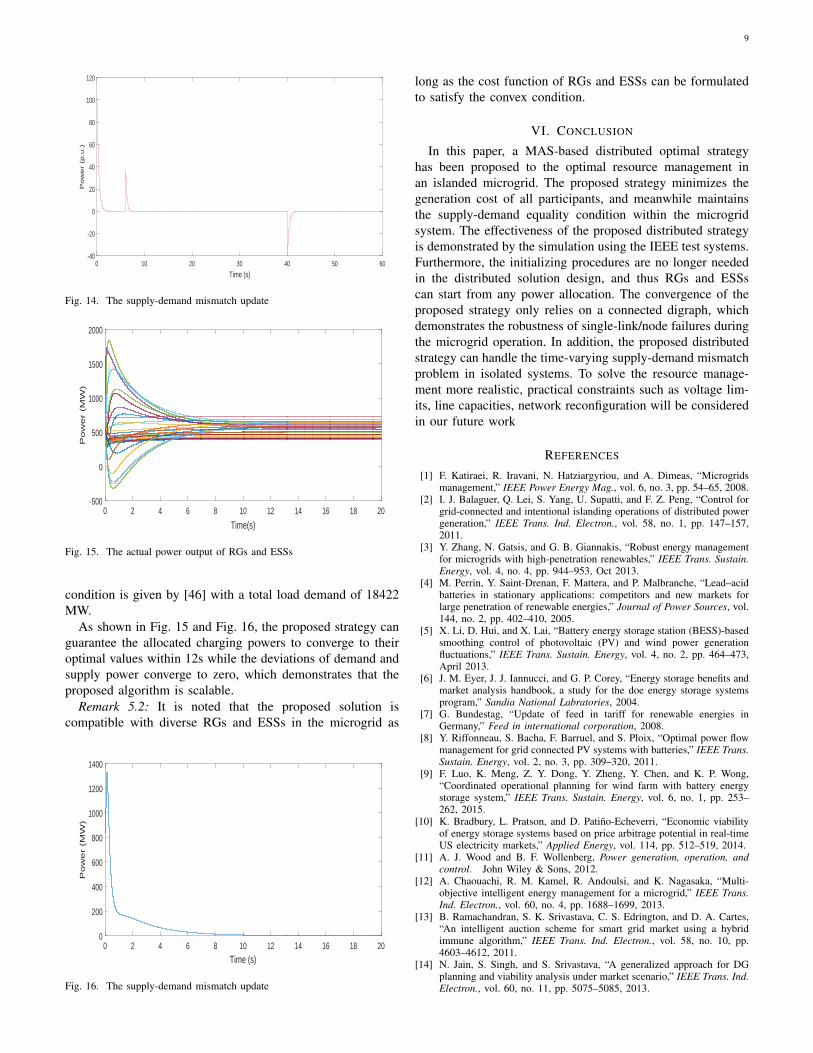
D. Case 5.4
The scalability of the proposed strategy is validated. To doso, we implement the optimal control strategy to the modifiedIEEE 162-bus system. There are three types of RGs in thissystem, i.e., eight PVs, eight WTs and one solar thermal, andtwo types of ESSs, i.e., battery storage system and fuel cells.The cost functions of fuel cell and solar thermal are based onthe cost model in [44], [45], respectively. The communicationnetwork is weight-balanced and strongly connected. The initial
9
0 10 20 30 40 50 60
Time (s)
-40
-20
0
20
40
60
80
100
120P
ow
er
(p.u
.)
Fig. 14. The supply-demand mismatch update
0 2 4 6 8 10 12 14 16 18 20
Time(s)
-500
0
500
1000
1500
2000
Pow
er
(MW
)
Fig. 15. The actual power output of RGs and ESSs
condition is given by [46] with a total load demand of 18422MW.
As shown in Fig. 15 and Fig. 16, the proposed strategy canguarantee the allocated charging powers to converge to theiroptimal values within 12s while the deviations of demand andsupply power converge to zero, which demonstrates that theproposed algorithm is scalable.
Remark 5.2: It is noted that the proposed solution iscompatible with diverse RGs and ESSs in the microgrid as
0 2 4 6 8 10 12 14 16 18 20
Time (s)
0
200
400
600
800
1000
1200
1400
Po
we
r (M
W)
Fig. 16. The supply-demand mismatch update
long as the cost function of RGs and ESSs can be formulatedto satisfy the convex condition.
VI. CONCLUSION
In this paper, a MAS-based distributed optimal strategyhas been proposed to the optimal resource management inan islanded microgrid. The proposed strategy minimizes thegeneration cost of all participants, and meanwhile maintainsthe supply-demand equality condition within the microgridsystem. The effectiveness of the proposed distributed strategyis demonstrated by the simulation using the IEEE test systems.Furthermore, the initializing procedures are no longer neededin the distributed solution design, and thus RGs and ESSscan start from any power allocation. The convergence of theproposed strategy only relies on a connected digraph, whichdemonstrates the robustness of single-link/node failures duringthe microgrid operation. In addition, the proposed distributedstrategy can handle the time-varying supply-demand mismatchproblem in isolated systems. To solve the resource manage-ment more realistic, practical constraints such as voltage lim-its, line capacities, network reconfiguration will be consideredin our future work
REFERENCES
[1] F. Katiraei, R. Iravani, N. Hatziargyriou, and A. Dimeas, “Microgridsmanagement,” IEEE Power Energy Mag., vol. 6, no. 3, pp. 54–65, 2008.
[2] I. J. Balaguer, Q. Lei, S. Yang, U. Supatti, and F. Z. Peng, “Control forgrid-connected and intentional islanding operations of distributed powergeneration,” IEEE Trans. Ind. Electron., vol. 58, no. 1, pp. 147–157,2011.
[3] Y. Zhang, N. Gatsis, and G. B. Giannakis, “Robust energy managementfor microgrids with high-penetration renewables,” IEEE Trans. Sustain.Energy, vol. 4, no. 4, pp. 944–953, Oct 2013.
[4] M. Perrin, Y. Saint-Drenan, F. Mattera, and P. Malbranche, “Lead–acidbatteries in stationary applications: competitors and new markets forlarge penetration of renewable energies,” Journal of Power Sources, vol.144, no. 2, pp. 402–410, 2005.
[5] X. Li, D. Hui, and X. Lai, “Battery energy storage station (BESS)-basedsmoothing control of photovoltaic (PV) and wind power generationfluctuations,” IEEE Trans. Sustain. Energy, vol. 4, no. 2, pp. 464–473,April 2013.
[6] J. M. Eyer, J. J. Iannucci, and G. P. Corey, “Energy storage benefits andmarket analysis handbook, a study for the doe energy storage systemsprogram,” Sandia National Labratories, 2004.
[7] G. Bundestag, “Update of feed in tariff for renewable energies inGermany,” Feed in international corporation, 2008.
[8] Y. Riffonneau, S. Bacha, F. Barruel, and S. Ploix, “Optimal power flowmanagement for grid connected PV systems with batteries,” IEEE Trans.Sustain. Energy, vol. 2, no. 3, pp. 309–320, 2011.
[9] F. Luo, K. Meng, Z. Y. Dong, Y. Zheng, Y. Chen, and K. P. Wong,“Coordinated operational planning for wind farm with battery energystorage system,” IEEE Trans. Sustain. Energy, vol. 6, no. 1, pp. 253–262, 2015.
[10] K. Bradbury, L. Pratson, and D. Patino-Echeverri, “Economic viabilityof energy storage systems based on price arbitrage potential in real-timeUS electricity markets,” Applied Energy, vol. 114, pp. 512–519, 2014.
[11] A. J. Wood and B. F. Wollenberg, Power generation, operation, andcontrol. John Wiley & Sons, 2012.
[12] A. Chaouachi, R. M. Kamel, R. Andoulsi, and K. Nagasaka, “Multi-objective intelligent energy management for a microgrid,” IEEE Trans.Ind. Electron., vol. 60, no. 4, pp. 1688–1699, 2013.
[13] B. Ramachandran, S. K. Srivastava, C. S. Edrington, and D. A. Cartes,“An intelligent auction scheme for smart grid market using a hybridimmune algorithm,” IEEE Trans. Ind. Electron., vol. 58, no. 10, pp.4603–4612, 2011.
[14] N. Jain, S. Singh, and S. Srivastava, “A generalized approach for DGplanning and viability analysis under market scenario,” IEEE Trans. Ind.Electron., vol. 60, no. 11, pp. 5075–5085, 2013.

10
[15] H. Xin, Z. Qu, J. Seuss, and A. Maknouninejad, “A self-organizing strat-egy for power flow control of photovoltaic generators in a distributionnetwork,” IEEE Trans. Power Syst., vol. 26, no. 3, pp. 1462–1473, 2011.
[16] M. G. Kallitsis, G. Michailidis, and M. Devetsikiotis, “Optimal powerallocation under communication network externalities,” IEEE Trans.Smart Grid, vol. 3, no. 1, pp. 162–173, 2012.
[17] Z. Wang, K. Yang, and X. Wang, “Privacy-preserving energy schedulingin microgrid systems,” IEEE Transactions on Smart Grid, vol. 4, no. 4,pp. 1810–1820, 2013.
[18] A. De Bonis, J. P. Catalao, A. Mazza, G. Chicco, and F. Torelli, “Anovel optimization algorithm solving network reconfiguration,” in PowerSystems Computation Conference (PSCC), 2014. IEEE, 2014, pp. 1–7.
[19] J.-H. Teng, S.-W. Luan, D.-J. Lee, and Y.-Q. Huang, “Optimal charg-ing/discharging scheduling of battery storage systems for distributionsystems interconnected with sizeable PV generation systems,” IEEETrans. Power Syst, vol. 28, no. 2, pp. 1425–1433, 2013.
[20] Z. Yang, R. Wu, J. Yang, K. Long, and P. You, “Economical operationof microgrid with various devices via distributed optimization,” IEEETrans. Smart Grid, vol. 7, no. 2, pp. 857–867, 2016.
[21] Y. Xu and Z. Li, “Distributed optimal resource management based onthe consensus algorithm in a microgrid,” IEEE Trans. Ind. Electron.,vol. 62, no. 4, pp. 2584–2592, 2015.
[22] R. Olfati-Saber, J. A. Fax, and R. M. Murray, “Consensus and coop-eration in networked multi-agent systems,” Proceedings of the IEEE,vol. 95, no. 1, pp. 215–233, 2007.
[23] J. M. Solanki, S. Khushalani, and N. N. Schulz, “A multi-agent solutionto distribution systems restoration,” IEEE Trans. Power syst, vol. 22,no. 3, pp. 1026–1034, 2007.
[24] W. Liu, W. Gu, W. Sheng, X. Meng, Z. Wu, and W. Chen, “Decentralizedmulti-agent system-based cooperative frequency control for autonomousmicrogrids with communication constraints,” IEEE Trans. Sustain. En-ergy, vol. 5, no. 2, pp. 446–456, April 2014.
[25] B. Zhao, C. Guo, and Y. Cao, “A multiagent-based particle swarmoptimization approach for optimal reactive power dispatch,” IEEE Trans.Power Syst, vol. 20, no. 2, pp. 1070–1078, 2005.
[26] W. Ren and R. W. Beard, “Consensus seeking in multiagent systemsunder dynamically changing interaction topologies,” IEEE Transactionson automatic control, vol. 50, no. 5, pp. 655–661, 2005.
[27] C. Zhao, J. He, P. Cheng, and J. Chen, “Consensus-based energymanagement in smart grid with transmission losses and directed com-munication,” IEEE Transactions on Smart Grid, 2016.
[28] Z. Ding and Z. Li, “Distributed adaptive consensus control of nonlinearoutput-feedback systems on directed graphs,” Automatica, vol. 72, pp.46–52, 2016.
[29] F. Bullo, J. Cortes, and S. Martinez, Distributed control of roboticnetworks: a mathematical approach to motion coordination algorithms.Princeton University Press, 2009.
[30] W. D. Kellogg, M. H. Nehrir, G. Venkataramanan, and V. Gerez, “Gen-eration unit sizing and cost analysis for stand-alone wind, photovoltaic,and hybrid wind/PV systems,” IEEE Trans. Energy Convers., vol. 13,no. 1, pp. 70–75, Mar 1998.
[31] A. D. Dominguez-Garcia, S. T. Cady, and C. N. Hadjicostis, “Decen-tralized optimal dispatch of distributed energy resources,” in 2012 IEEE51st IEEE Conference on Decision and Control (CDC). IEEE, 2012,pp. 3688–3693.
[32] R. Deng, Z. Yang, J. Chen, and M.-Y. Chow, “Load scheduling withprice uncertainty and temporally-coupled constraints in smart grids,”IEEE Trans. Power Syst., vol. 29, no. 6, pp. 2823–2834, 2014.
[33] Z. Wang, W. Wu, and B. Zhang, “A fully distributed power dispatchmethod for fast frequency recovery and minimal generation cost inautonomous microgrids,” IEEE Trans. Smart Grid, vol. 7, no. 1, pp.19–31, Jan 2016.
[34] T. Zhao, Z. Zuo, and Z. Ding, “Cooperative control of distributed batteryenergy storage systems in microgrids,” in 2016 35th Chinese ControlConference (CCC), July 2016, pp. 10 019–10 024.
[35] F. A. Amoroso and G. Cappuccino, “Advantages of efficiency-awaresmart charging strategies for pevs,” Energy Conversion and Manage-ment, vol. 54, no. 1, pp. 1–6, 2012.
[36] D. P. Bertsekas, “Necessary and sufficient conditions for a penaltymethod to be exact,” Math. Programming, vol. 9, no. 1, pp. 87–99,1975.
[37] S. Li and Y. Guo, “Dynamic consensus estimation of weighted averageon directed graphs,” International Journal of Systems Science, vol. 46,no. 10, pp. 1839–1853, 2015.
[38] Z. Ding, Nonlinear and Adaptive Control Systems. London, U.K.: Inst.Eng. Technol. (IET), 2013.
[39] Y. Xu, W. Zhang, G. Hug, S. Kar, and Z. Li, “Cooperative control ofdistributed energy storage systems in a microgrid,” IEEE Trans. SmartGrid, vol. 6, no. 1, pp. 238–248, 2015.
[40] F. Chen, M. Chen, Q. Li, K. Meng, Y. Zheng, J. Guerrero, andD. Abbott, “Cost based droop schemes for economic dispatch in islandedmicrogrids,” 2016.
[41] G. Binetti, A. Davoudi,F. L. Lewis, D. Naso and B. Turchiano “Distributed Consensus-Based Economic Dispatch With TransmissionLosses,” IEEE Trans. Power Syst, vol. 29, no. 4, pp. 1711-1720, 2014.
[42] Y. Xu, W. Zhang, W. Liu, X. Wang, F. Ferrese, C. Zang, and H. Yu,“Distributed subgradient-based coordination of multiple renewable gen-erators in a microgrid,” IEEE Trans. Power Syst, vol. 29, no. 1, pp.23–33, 2014.
[43] N. Rahbari-Asr and M.-Y. Chow, “Cooperative distributed demandmanagement for community charging of PHEV/PEVs based on KKTconditions and consensus networks,” IEEE Trans. Ind. Informat., vol. 10,no. 3, pp. 1907–1916, 2014.
[44] X. Hu,, N. Murgovski, L. M. Johannesson, and B.Egardt, “Optimaldimensioning and power management of a fuel cell/battery hybrid busvia convex programming,” IEEE/ASME transactions on mechatronics,vol. 20, no. 1, pp. 457–468, 2015.
[45] M.T. Ameli, S. Moslehpour, and M. Shamlo, “Economical load distribu-tion in power networks that include hybrid solar power plants, ” ElectricPower Systems Research, vol. 78, no. 7, pp. 1147–1152, 2008.
[46] P. S. T. C. Archive:, “162-bus, 17 generator dynamic test case,” http://www.ee.washington.edu/research/pstca/dyn17/pg tcadd17.htm.
Tianqiao Zhao received his B.Eng. degree in au-tomatic control from North China Electric PowerUniversity, Hebei, China, in 2013, and his M.Scdegree in electrical and electronic engineering fromthe University of Manchester, U.K., in 2014. He isnow a Ph.D. candidate in control engineering withthe School of Electrical and Electronic Engineeringat the University of Manchester, U.K. His researchinterests include distributed optimization of micro-grids, distributed control and energy storage systems.
Zhengtao Ding received the B.Eng. degree fromTsinghua University, Beijing, China, and the M.Sc.degree in systems and control and the Ph.D. degreein control systems from the University of Manch-ester Institute of Science and Technology, Manch-ester, U.K. After working as a Lecturer with NgeeAnn Polytechnic, Singapore, for ten years, in 2003,he joined The University of Manchester, Manchester,U.K., where he is currently a Senior Lecturer ofcontrol engineering with the School of Electrical andElectronic Engineering. He is the author of the book
Nonlinear and Adaptive Control Systems (IET, 2013) and a number of journalpapers. His research interests include nonlinear and adaptive control theoryand their applications. Dr. Ding serves as an Associate Editor for the IEEETRANSACTIONS ON AUTOMATIC CONTROL, Transactions of the Institute ofMeasurement and Control, Control Theory and Technology, MathematicalProblems in Engineering, Unmanned Systems, and the International Journalof Automation and Computing.
Related Documents




![Optimal adaptive leader-follower consensus of linear multi-agent …jad.shahroodut.ac.ir/article_407_59ec34f8e587ebf6ee51353... · 2021. 1. 23. · Adaptive control [19,20] allows](https://static.cupdf.com/doc/110x72/60c42736b6f748571a1f5944/optimal-adaptive-leader-follower-consensus-of-linear-multi-agent-jad-2021-1-23.jpg)





