DISCRETE-TIME ADAPTIVE CONTROL FOR NONLINEAR SYSTEMS WITH PERIODIC PARAMETERS: A LIFTING APPROACH Deqing Huang and Jian-Xin Xu ABSTRACT In this paper we develop a general discrete-time adaptive control approach suitable for nonlinear systems with periodic parametric uncertainties. The underlying idea of the new approach is to convert the periodic parameters into an augmented constant parametric vector by a lifting technique. The novelty of this approach is the establishment of a bridge between classical adaptive control problems and periodic adaptive control problems. As such, the well-established discrete-time adaptive control schemes can be easily applied to various control problems with periodic parameters, such as plants that do not meet the linear growth condition, plants that are nonlinear in parameters, plants with unknown control directions, plants in parametric-strict-feedback form, etc. Another major advantage of the new adaptive control is the ability to adaptively update all parameters in parallel, hence expedite the adaption speed. The effectiveness of the proposed approach is illustrated by simulation. Key Words: Adaptive control, periodic parameters, discrete-time, lifting. I. INTRODUCTION Periodic variations are encountered in many real systems such as system parameters [1, 2] or exogenous disturbances [3–5]. Discrete-time periodic adaptive control (PAC) has been proposed and the underlying idea of PAC is to update parameters in the same instance of two consecutive periods [6, 7]. Due to the time-varying nature, it would be very difficult, if not impossible, to design appropriate periodic adaptive controllers for more general scenarios such as plants with unknown control directions, plants in parametric- strict-feedback form, plants with nonlinear parameteri- zation, plants not satisfying any growth conditions, etc. Manuscript received June 22, 2010; revised September 16, 2010; accepted October 28, 2010. The authors are with the National University of Singa- pore, 10 Kent Ridge Crescent, Singapore, 119260 (e-mail: [email protected]). This paper was supported by the SERC Research Grant, No: 092 101 00558, Singapore, and the Program for New Century Excellent Talents in University under Grant NCET- 08-0370, China. On the other hand, many effective adaptive control methods have been developed for discrete-time systems with time-invariant parametric uncertainties, such as [8] for linear MIMO form, [9] for parametric-strict- feedback form, [10, 11] for unknown control direction, [12] for plants that are nonlinear in parameters, [13] for plants without any growth conditions in nonlineari- ties. It would be highly desirable if we can apply these well established adaptive control methods to plants with periodic parameters. To achieve this objective, we adopt a lifting technique to convert periodic parameters into an augmented vector of time-invariant parameters, in the sequel all existing adaptive control methods can be applied. The underlying idea of the proposed approach is shown in Fig. 1. Denote o k a periodic unknown param- eter with a periodicity N that is o k = o k−N where N is a positive integer, and k a known nonlinear regressor of the system states. Fig. 1 shows that the product o k k can be converted to the product of two augmented vectors h T n k where h consists of constant unknowns, and n k has only one non-trivial element at each time k . From the figure, we can see that the idea is to extend the periodic 2011 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control Society Asian Journal of Control, Vol. 14, No. 2, pp. 373–383, March 2012 Published online 24 March 2011 in Wiley Online Library (wileyonlinelibrary.com) DOI: 10.1002/asjc.335

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Asian Journal of Control, Vol. 15, No. 1, pp. 1 11, January 2013
Published online in Wiley Online Library (wileyonlinelibrary.com). DOI: 10.1002/asjc.335
DISCRETE-TIME ADAPTIVE CONTROL FOR NONLINEAR SYSTEMS
WITH PERIODIC PARAMETERS: A LIFTING APPROACH
Deqing Huang and Jian-Xin Xu
ABSTRACT
In this paper we develop a general discrete-time adaptive controlapproach suitable for nonlinear systems with periodic parametric uncertainties.The underlying idea of the new approach is to convert the periodic parametersinto an augmented constant parametric vector by a lifting technique. Thenovelty of this approach is the establishment of a bridge between classicaladaptive control problems and periodic adaptive control problems. As such, thewell-established discrete-time adaptive control schemes can be easily appliedto various control problems with periodic parameters, such as plants that donot meet the linear growth condition, plants that are nonlinear in parameters,plants with unknown control directions, plants in parametric-strict-feedbackform, etc. Another major advantage of the new adaptive control is the abilityto adaptively update all parameters in parallel, hence expedite the adaptionspeed. The effectiveness of the proposed approach is illustrated by simulation.
Key Words: Adaptive control, periodic parameters, discrete-time, lifting.
I. INTRODUCTION
Periodic variations are encountered in many realsystems such as system parameters [1, 2] or exogenousdisturbances [3–5]. Discrete-time periodic adaptivecontrol (PAC) has been proposed and the underlyingidea of PAC is to update parameters in the sameinstance of two consecutive periods [6, 7]. Due to thetime-varying nature, it would be very difficult, if notimpossible, to design appropriate periodic adaptivecontrollers for more general scenarios such as plantswith unknown control directions, plants in parametric-strict-feedback form, plants with nonlinear parameteri-zation, plants not satisfying any growth conditions, etc.
Manuscript received June 22, 2010; revised September 16,2010; accepted October 28, 2010.The authors are with the National University of Singa-
pore, 10 Kent Ridge Crescent, Singapore, 119260 (e-mail:[email protected]).This paper was supported by the SERC Research Grant,
No: 092 101 00558, Singapore, and the Program for NewCentury Excellent Talents in University under Grant NCET-08-0370, China.
On the other hand, many effective adaptive controlmethods have been developed for discrete-time systemswith time-invariant parametric uncertainties, such as[8] for linear MIMO form, [9] for parametric-strict-feedback form, [10, 11] for unknown control direction,[12] for plants that are nonlinear in parameters, [13]for plants without any growth conditions in nonlineari-ties. It would be highly desirable if we can apply thesewell established adaptive control methods to plants withperiodic parameters. To achieve this objective, we adopta lifting technique to convert periodic parameters intoan augmented vector of time-invariant parameters, inthe sequel all existing adaptive control methods can beapplied.
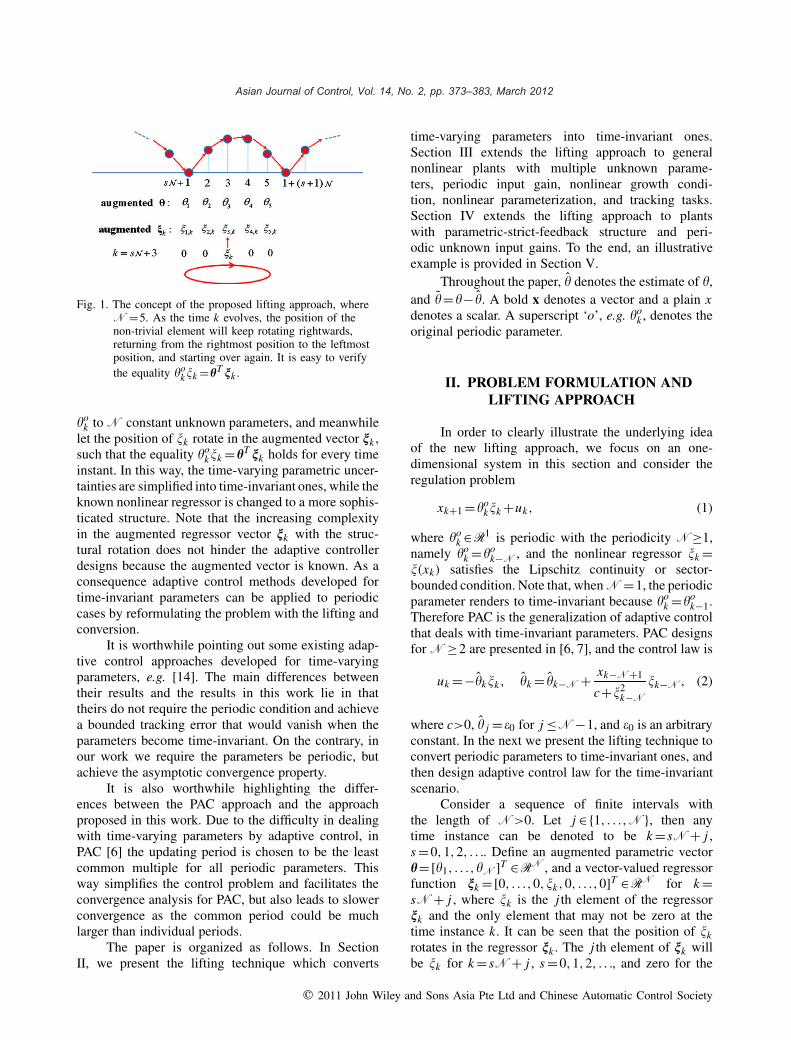
The underlying idea of the proposed approach isshown in Fig. 1. Denote �ok a periodic unknown param-eter with a periodicityN that is �ok =�ok−N whereN isa positive integer, and �k a known nonlinear regressor ofthe system states. Fig. 1 shows that the product �ok�k canbe converted to the product of two augmented vectorshT nk where h consists of constant unknowns, and nk hasonly one non-trivial element at each time k. From thefigure, we can see that the idea is to extend the periodic
� 2011 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control Society
Asian Journal of Control, Vol. 14, No. 2, pp. 373–383, March 2012
Published online 24 March 2011 in Wiley Online Library (wileyonlinelibrary.com) DOI: 10.1002/asjc.335
Asian Journal of Control, Vol. 15, No. 1, pp. 1 11, January 2013
Fig. 1. The concept of the proposed lifting approach, whereN=5. As the time k evolves, the position of thenon-trivial element will keep rotating rightwards,returning from the rightmost position to the leftmostposition, and starting over again. It is easy to verifythe equality �ok�k =hT nk .
�ok toN constant unknown parameters, and meanwhilelet the position of �k rotate in the augmented vector nk ,such that the equality �ok�k =hT nk holds for every timeinstant. In this way, the time-varying parametric uncer-tainties are simplified into time-invariant ones, while theknown nonlinear regressor is changed to a more sophis-ticated structure. Note that the increasing complexityin the augmented regressor vector nk with the struc-tural rotation does not hinder the adaptive controllerdesigns because the augmented vector is known. As aconsequence adaptive control methods developed fortime-invariant parameters can be applied to periodiccases by reformulating the problem with the lifting andconversion.
It is worthwhile pointing out some existing adap-tive control approaches developed for time-varyingparameters, e.g. [14]. The main differences betweentheir results and the results in this work lie in thattheirs do not require the periodic condition and achievea bounded tracking error that would vanish when theparameters become time-invariant. On the contrary, inour work we require the parameters be periodic, butachieve the asymptotic convergence property.
It is also worthwhile highlighting the differ-ences between the PAC approach and the approachproposed in this work. Due to the difficulty in dealingwith time-varying parameters by adaptive control, inPAC [6] the updating period is chosen to be the leastcommon multiple for all periodic parameters. Thisway simplifies the control problem and facilitates theconvergence analysis for PAC, but also leads to slowerconvergence as the common period could be muchlarger than individual periods.
The paper is organized as follows. In SectionII, we present the lifting technique which converts
time-varying parameters into time-invariant ones.Section III extends the lifting approach to generalnonlinear plants with multiple unknown parame-ters, periodic input gain, nonlinear growth condi-tion, nonlinear parameterization, and tracking tasks.Section IV extends the lifting approach to plantswith parametric-strict-feedback structure and peri-odic unknown input gains. To the end, an illustrativeexample is provided in Section V.
Throughout the paper, � denotes the estimate of �,and �=�− �. A bold x denotes a vector and a plain xdenotes a scalar. A superscript ‘o’, e.g. �ok , denotes theoriginal periodic parameter.
II. PROBLEM FORMULATION ANDLIFTING APPROACH
In order to clearly illustrate the underlying ideaof the new lifting approach, we focus on an one-dimensional system in this section and consider theregulation problem
xk+1=�ok�k+uk, (1)
where �ok ∈R1 is periodic with the periodicity N≥1,namely �ok =�ok−N, and the nonlinear regressor �k =�(xk) satisfies the Lipschitz continuity or sector-bounded condition. Note that, whenN=1, the periodicparameter renders to time-invariant because �ok =�ok−1.Therefore PAC is the generalization of adaptive controlthat deals with time-invariant parameters. PAC designsfor N≥2 are presented in [6, 7], and the control law is
uk =−�k�k, �k = �k−N+ xk−N+1
c+�2k−N
�k−N, (2)
where c>0, � j = �0 for j ≤N−1, and �0 is an arbitraryconstant. In the next we present the lifting technique toconvert periodic parameters to time-invariant ones, andthen design adaptive control law for the time-invariantscenario.
Consider a sequence of finite intervals withthe length of N>0. Let j ∈{1, . . .,N}, then anytime instance can be denoted to be k= sN+ j ,s=0,1,2, . . .. Define an augmented parametric vectorh=[�1, . . .,�N]T ∈RN, and a vector-valued regressorfunction nk =[0, . . .,0,�k,0, . . .,0]T ∈RN for k=sN+ j , where �k is the j th element of the regressornk and the only element that may not be zero at thetime instance k. It can be seen that the position of �krotates in the regressor nk . The j th element of nk willbe �k for k= sN+ j , s=0,1,2, . . ., and zero for the
� 2011 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control Society
Asian Journal of Control, Vol. 14, No. 2, pp. 373–383, March 2012

D. Huang and J.-X. Xu: Discrete-Time Adaptive Control for Nonlinear Systems
rest of time. In other words, �k rotates in nk with theperiodicity of N.
Notice the fact �ok =�osN+ j =� j by virtue of theperiodicity N, and nk has only the j -th element, wehave hT nk =� j�k =�ok�k , and the system (1) can berewritten as
xk+1=hT nk+uk . (3)
The uncertainty in (3) is time-invariant and the nonlinearregressor nk satisfies the Lipschitz continuity or sector-bounded condition only if the original �k does. Thisimplies that the original problem with periodic param-eters has been converted to the time-invariant problem,hence various existing adaptive control methods fortime-invariant parametric uncertainties can be applieddirectly. For the system (3), the classical adaptivecontrol law is
uk =−hTk nk, hk = hk−1+ xknk−1
c+‖nk−1‖2, (4)
where c>0, hk =[�1,k, . . ., � j,k, . . ., �N,k]T , and h0=�0[1, . . .,1]T .Theorem 1. The adaptive control law (4) withthe lifting approach, and the PAC law (2), areequivalent.
Proof. Consider time instances k= sN+ j , s=0,1, . . ., j=1, . . .,N. For a given j , the only non-zero elements in nk is the j th element, �k , hence
hTk nk = � j,k�k . If we can prove � j,k= �k , then h
Tk nk =
� j,k�k = �k�k .Using the fact ‖nk‖2=�2k , from the updating law
(4) we obtain
hk−N+1= hk−N+ xk−N+1
c+�2k−N
nk−N. (5)
Since k−N= (s−1)N+ j , the only non-zero elementin the vector-valued regressor nk−N is the j th element,�k−N, while other elements are zero. Thus among Nparameters in (5), the only one updated at k−N+1 isthe j th component, namely
� j,k−N+1= � j,k−N+ xk−N+1
c+�2k−N
�k−N. (6)
Since the non-zero element in the vector-valuedregressor rotates with the periodicity of N, fromk−N+1 to k the element at the j th place is zero. Inother words, from k−N+1 to k, there is no updating
for the j th parameter, thus
� j,k−N+1= � j,k−N+2= . . .= � j,k. (7)
Substituting the relationship (7) into (6) yields
� j,k= � j,k−N+ xk−N+1
c+�2k−N
�k−N (8)
which is the same as (2). By choosing the same initialconditions for (2) and (8), we have � j,k = �k . �
III. EXTENSION TO GENERAL CASES
In this section, we explore possible extensionsto various scenarios with multiple periodic parame-ters, periodic input gain, nonlinear growth condition,nonlinear parameterization, tracking task, respectively.Meanwhile, the advantage of the lifting approach willbe made clear.
3.1 Extension to multiple parameters and periodicinput gain
For simplicity, consider a scalar system
xk+1= (hok)T nk+bokuk, x(0)= x0, (9)
where hok =[�o1,k, . . .,�om,k]T are unknown periodicparameters, nk =[�1,k, . . .,�m,k]T is a known vector-valued regressor, and bok ∈C[0,∞) is a periodic uncer-tain gain of the system input. Note that each unknownparameter, �oi,k or bok , may have its own period Ni orNb. To avoid control singularity, it is assumed thatbok has a lower bound, that is, bok ≥bmin where bmin>0is known. The PAC designs will still be applicable byusing the least common multiple of Ni and Nb asthe updating period N [6, 7]. However, the use of thecommon period will make the periodic adaptation inef-ficient. If possible, the periodic adaptation should beconducted according to individual periods. To addressthis issue, we reconsider system (9) by using the liftingapproach. The presence of the uncertain periodic inputgain presents another difficulty for PAC designs andleads to complicated controllers as shown in [7]. Byconverting the periodic parameters into time-invariant,the adaptive control design can be simplified.
To derive the lifting adaptive control law, firstdefine the augmented parametric vector and corre-sponding vector-valued nonlinearity regressor. Notethat the i-th element of hok is periodic with period Ni ,thus there exist Ni values [�i,1, . . .,�i,Ni ]T . We can
� 2011 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control Society

Asian Journal of Control, Vol. 15, No. 1, pp. 1 11, January 2013
construct an augmented vector including all m periodicparameters
h� [hT1 , . . ., hTm]T ∈RN1+···+Nm
= [�1,1, . . .,�1,N1,�2,1, . . .,�m,1, . . .,�m,Nm ]T ,
(10)
with all elements being constant. Accordingly, we candefine an augmented regressor
nk =[nT1,k, . . ., nTm,k]T ∈RN1+···+Nm , (11)
where ni,k =[0, . . .,0,�i,k,0, . . .,0]T ∈RNi , and theelement �i,k appears in the j th position of ni,k only ifk= sNi + j , for j=1,2, . . .,Ni . It can be seen thatm functions �i,k , i =1, . . .,m, rotate according to theirown periodicity, Ni , respectively. As a result, for eachtime instance k, we have
(hok)T nk = hT nk (12)
which converts periodic parameters into an augmentedtime-invariant vector.
Analogously we convert bok into an augmentedvector b=[b1, . . .,bNb ]T and meanwhile define aregressor fk =[0, . . .,0,1,0, . . .,0]T ∈RNb , where theelement 1 appears in the j th position of fk only whenk= sNb+ j . Hence for every time instance bok =bT fk ,i.e. bok is converted into an augmented time-invariantparametric vector. Consequently the system (9) can berewritten as below
xk+1= hT nk+bT fkuk, x(0)= x0. (13)
where all parametric uncertainties in (13) are timeinvariant.
Define /k =[hTk , bTk ]T be the estimation oftime-invariant parametric uncertainties h and b,
/k =[hTk , bTk ]T be the estimation errors where hk =h− hk, bk =b− bk, and n∗k =[nTk ,− h
Tk nk
bTk fkfTk ]T . Design
the adaptive control law
uk = − hTk nk
bTk fk, (14)
/k = L
[/k−1+ xkn
∗k−1
c+‖n∗k−1‖2], c>0, (15)
where /(0)= �0 I and the projector L is to guaranteeeach element of bk not below the bound bmin. Denote[aT1,k,aT2,k]T the vector /k , where a1,k is the update of
hk , and a2,k is the update of bk . By the projector wehave L[a1,k]=a1,k , and for each element a of a2,k
L[a]={a a>bmin
amin a≤bmin.
The convergence analysis can be conducted similarly asin the PAC [6] by choosing the periodicity N=1.
The performance improvement of the liftingapproach based adaptive control can be seen from theconstruction of the vectors nk , where the element �i,kappears in the j th position of ni,k only if k= sNi + j ,for j=1,2, . . .,Ni . The m regression components,�i,k , i =1, . . .,m, rotate according to their own period-icity, Ni , respectively. In other words, the parameterestimate �i,k will be updated repeatedly after every Nisteps, namely updated according to its own periodicity.The same is for the update of bk because the onlynon-zero element, which is 1, rotates in the augmentedregressor fk and returns to the same position after Nbsteps.
Next consider in (9) amore generic scenario wherethe sign of the periodic bok , i.e. the control direction, isunknown to us. For simplicity we consider m=1, i.e.�ok�k that can be expressed as hT nk , and
xk+1=hT nk +bokuk =bok [(bok )−1hT nk+uk]. (16)
Define a new augmented parametric vector h=[b−1
1 hT , . . .,b−1
NbhT ]T ∈RNbN, and a new regressor
nk =[0, . . .,0,nTk ,0, . . .,0]T ∈RNbN, where the onlynon-zero element, �k , appears at the j th place fork= sNbN+ j , j =1,2, . . .,NbN, s=0,1, . . ., androtates with the periodicity of NbN. The model (16)can be rewritten to be
xk+1=bok [hT nk+uk]. (17)
Since the sign of bok is unknown, discrete Nussbaumgain schememust be adopted. Similar to the work [15], adiscrete-time adaptive control law with Nussbaum gaincan be constructed to solve regulation problems
uk = −hTk nk,hk = hk−1+�Nk nk−1
�kdk
,
�k = �xkgk
, dk =1+‖nk−1‖2+|Nk |+�2k,
h0 = �0 I,�>0, gk =1+|Nk |,
(18)
where Nk is the discrete Nussbaum gain defined to be
Nk = zs,k SN ,k, zk = zk−1+ gk−1�2k−1
dk−1, z0=0, (19)
� 2011 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control Society
Asian Journal of Control, Vol. 14, No. 2, pp. 373–383, March 2012

D. Huang and J.-X. Xu: Discrete-Time Adaptive Control for Nonlinear Systems
zs,k = supk′≤k{zk′ }, and SN ,k is the sign function of thediscrete Nussbaum gain, i.e. SN ,k=±1.
3.2 Extension to more general nonlinear plants
In most of discrete-time adaptive control worksthe nonlinearities are restricted to sector-bounded orLipschitz continuous, i.e. satisfying the linear growthcondition. In [13], a least-squares estimator withnonlinear data weighting is developed and used toadaptively control a discrete-time nonlinear systemwith constant unknown parameters, where the nonlinearregressor does not satisfy the linear growth condition.Using the lifting technique, this result can be extendedto plants with periodic parameters. Consider the plant(3) that is the lifted version of the plant (1)
xk+1=hT nk+uk,
but here we only assume the regressor nk boundedfor bounded xk . By combining a certainty-equivalencecontroller with a least-squares estimator as below
uk = −hTk nk,hk = hk−1+(1+nTk nk)ek Pknk−1,
ek = xk−uk−1− hTk−1nk−1, h0= �0 I,
Pk = Pk−1− (1+nTk nk)Pk−1nk−1nTk−1Pk−1
1+(1+nTk nk)nTk−1Pk−1nk−1
(20)
with P0= PT0 >0, a global stability result can be derived
using the same Lyapunov analysis given in [13]. Onthe contrary, this extension does not hold for the PACmethod [6] that employs direct periodic updating. Thedifficulty to extend the Lyapunov analysis [13] fromtime-based adaptation to period-based adaptation is dueto the mixed time and period based operations in thelatter, which is far more complicated than the former.
Next we consider extension to systems withconvex/concave parameterizations. For simplicityconsider a class of nonlinear discrete-time systems witha single periodic parameter with the periodicity N.
xk+1= f (xk,�ok)+uk, (21)
where f (·) is either a convex or concave functionwith respect to the argument �ok . In [12], an adap-tive control method was proposed to deal with thisproblem when unknown parameters are time invariant.Now, using the lifting technique, we can write twoaugmented vectors fk =[ f (xk,�1), . . ., f (xk,�N)]T ,fk =[0, . . .,0,1,0, . . .,0]T ∈RN, where �i for i =1, . . .,N are constant unknown parameters, and theunity element appears at the j th position only if
k= sN+ j and rotates. As such, we have f (xk,�k)=fTk fk , and can rewrite (21) as
xk+1= fTk fk+uk, (22)
which contains time-invariant parameters only, hencethe design [12] can be applied with minor changes.
3.3 Extension to tracking tasks
Consider the plant (9) with multiple unknownparameters and the unknown periodic input gain. Itis required that the state xk follows a given refer-ence trajectory rk . Specifying the tracking error asek = xk−rk , we have
ek+1= xk+1−rk+1=hokT nk+bokuk −rk+1. (23)
Using the same lifting technique applied in (9), (23) canbe rewritten in the following form
ek+1= hT nk+bT fkuk−rk+1. (24)
To accommodate the tracking task, the adaptive controllaw (14)–(15) can be revised as
uk = 1
bTk fk(rk+1− hTk nk),
/k = L
[/k−1+ ekn∗k−1
c+‖n∗k−1‖2],
(25)
where c>0, /(0)= �0 I , /k =[hTk , bTk ]T and n∗k =
[nTk ,rk+1− hTk nk
bTk fkfTk ]T . The closed-loop system is then
given by
ek+1= /Tk n∗k . (26)
The convergence analysis can be conducted analogousto the tracking problem discussed in [6] by choosingthe periodicity N=1. What differs from [6] is that theadaptation law of (25) is a parallel updating.
Remark 1. Comparing with the PAC [6], the proposedlifting approach expedites the convergence speed byparallel updating, meanwhile does not increase the timecomplexity. In fact, the lifting algorithm (4) has thesame structure as the PAC algorithm (2). The param-eter estimation is updated linearly and iteratively inboth algorithms, hence the time complexity remains atthe same order for both algorithms. The only differ-ence lies in that the lifting algorithm is in vector formwhile the PAC is in scalar form when a single time-varying parameter is concerned. However, looking intothe definition of the augmented vector nk that has onlyone nonzero element at each time instant k, the actual
� 2011 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control Society
Asian Journal of Control, Vol. 15, No. 1, pp. 1 11, January 2013
computation involved in (4) at each time instant k isonly for a scalar case.
IV. EXTENSION TO HIGHER ORDERSYSTEMS
In the preceding extensions, all the plants are keptin one dimensional case. Now, we consider more exten-sion to higher order systems, where the plant takes theparametric-strict-feedback form
x1,k+1 = (ho1,k)T n1,k+bo1,kx2,k,
...
xn−1,k+1 = (hon−1,k)T nn−1,k+bon−1,k xn,k,
xn,k+1 = (hon,k)T nn,k+bon,kuk,
yk = x1,k,
(27)
where xl =[x1, x2, . . ., xl]T are system states, yk isthe system output, hol,k ∈Rml , bol,k ∈R, l=1, . . .,n, areunknown periodic parameters (ml ’s are positive inte-gers), nl,k�nl(xl,k)∈Rml denotes the known nonlinearregressor which is Lipschitz continuous. Assume thateach control gain bol,k always takes a positive or negativesign for all k, the periodicity of the i-th element of holor �oi,l is Ni,l for i =1, . . .,ml and l=1, . . .,n, and theperiodicity of bol is Nl,b for l=1, . . .,n. Without lossof generality, assume Ni,l and Nl,b are all relativelyprime. The control objective is to make the output yktrack a bounded reference trajectory rk and at the sametime guarantee the boundedness of all the closed-loopsignals.
When the control gains bol,k =1 and hol,k areconstant unknowns, the system (27) is in the parametric-strict-feedback form and has been studied in [9, 14, 16].When all the unknown parameters in (27) are constant,a robust adaptive control scheme is proposed [11],which uses a future state predictor and a discreteNussbaum gain. When the control directions are knowna priori, [7] a PAC scheme is proposed in which theleast common multiple is used as the sole updatingperiod. It is an open issue when the control directionsare uncertainties and periodic. In the following, byapplying the lifting technique the adaptive control [11]is extended to (27).
Rewrite the plant (27) as
yk+n = (ho1,k+n−1)T n1,k+n−1+bo1,k+n−1x2,k+n−1,
xl,k+n−l+1 = (hol,k+n−l)T nl,k+n−l +bol,k+n−l xl,k+n−l ,
xn,k+1 = (hon,k)T nn,k+bon,kuk,
with l=2, . . .,n−1.By iterative substitution, the outputequations can be written as
yk+n =n∑
l=1
l−1∏i=1
boi,k+n−i (hol,k+n−l )
T nl,k+n−l
+n∏
i=1boi,k+n−i uk . (28)
Define
�ok =
[(ho1,k+n−1)
T ,bo1,k+n−1(ho2,k+n−2)
T , . . .,
n−1∏i=1
boi,k+n−i (hon,k)
T
]T
∈R∑n
l=1ml ,
�ok+n−1 = [nT1,k+n−1, . . .,n
Tn,k]T ∈R
∑nl=1ml ,
gok =n∏
i=1boi,k+n−i ∈R,
the output Equation (28) can be further written in acompact form as
yk+n = (�ok)
T�ok+n−1+gokuk . (29)
Note that �ok and gok are still periodic unknowns.
4.1 Future state prediction
In (29), a key issue is the noncausal problembecause functions �o
k+n−1 depend on the future states.It is noted from (27) that the future states xl,k+n−l , l=1,2, . . .,n−1, are deterministic at the k-th step becausethey are independent of control input uk .
Comparing (27) with (9), we can see that everyxl subsystem in (27) takes a form analogous to (9).Using the lifting technique, hol,k can be converted into
an augmented vector hl ∈RNl that is exactly the sameas that derived in (10), where Nl =∑ml
i=1Ni,l . Like-wise, note that similarity between nl,k in (27) and nkin (9), nl,k can be converted to an augmented vector-valued regressor analogous to nk as we did for nk .Subsequently, the first n−1 state equations in (27) areequivalent to
xl,k+1=hTl nl,k +bTl xl+1,k , (30)
where xl+1,k =fl,k xl+1,k ∈RNl,b , l=1, . . .,n−1, andall the unknowns are time invariant. Then, by extendingthe result in [11] from scalar unknown case to vectorunknown case, a state predictor can be derived.
� 2011 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control Society
Asian Journal of Control, Vol. 14, No. 2, pp. 373–383, March 2012

D. Huang and J.-X. Xu: Discrete-Time Adaptive Control for Nonlinear Systems
4.2 Controller design
In designing the controller for the plant (29), twosubcases are taken into consideration (i) the controldirections are known, and (ii) the control directions areunknown. In (29), using the lifting technique,�o
k can beconverted into an augmented constant vector �∈R�,��
∑nl=1
∏l−1j=1N j,bNl , Nl =∑ml
i=1Ni,l , and the
associated �k+n−1=[�T1 (x1(k+n−1)), �T
2 (x2(k+n−2)), . . .,�T
n (xn(k))]T ∈R� is an extended regressor,satisfying
(�ok+n−1)
T�ok+n−1=�T�k+n−1. (31)
Thus, (29) is equivalent to
yk+n =�T�k+n−1+gokuk . (32)
Similarly, it is convenient to convert the control gaingok to gT fk , with g∈R�b ,�b�
∏nj=1N j,b being time
invariant, and fk =[0, . . .,0,1,0, . . .,0]T ∈R�b , wherethe only non-zero element, 1, appears in the j th posi-tion of fk when k= s�b+ j . Thus, (32) can be furtherexpressed as
yk+n =�T�k+n−1+gT fkuk . (33)
4.2.1 The control directions are known
Since (32) is transformed to a system withunknown time-invariant parameters � and g, wecan design a discrete-time adaptive backsteppingcontrol law so far as the control directions are knowna priori. Define /k =[�T
k , gTk ]T be the estimationof time-invariant parametric uncertainties � and g,
and �∗k+n−1=[�T
k+n−1,rk+n−�
Tk �(k+n−1|k)gTk fk
fTk ]T . The
following adaptive control law is proposed
uk = 1
gTk fk(rk+n −�
Tk �(k+n−1|k)), (34)
/k = L[/k−n +Pk�∗k−1ek], (35)
/ j = �0 I, j =0,−1, . . .,−n+1,
Pk = Pk−n− Pk−n(�∗k−1)
T�∗k−1Pk−n
1+(�∗k−1)
T Pk−n�∗k−1
, (36)
where Pj = PTj >0, ek = yk−rk , and �(k+n−1|k) is
the prediction of �k+n−1 at step k.
Theorem 2. Consider the adaptive closed-loop systemconsisting of system (27), adaptive control (34) with thecorresponding parameter updating law (35) and (36),
future state prediction law as given in [11]. All thesignals in the closed-loop system are guaranteed to bebounded and the tracking error ek converges to zeroasymptotically.
Proof. Substituting the adaptive control (34) into then-step predictor (32) and subtracting rk+n on both handsides, we obtain the following error dynamics
ek+n = /Tk �∗k+n−1+�
Tk (�k+n−1−�(k+n−1|k))
with /k =[�Tk , gTk ]T , where �k =�−�k and gk =g−
gk . Select a nonnegative function Vk = /Tk P−1k /k and
consider its difference with respect to n
�Vk ≤ /Tk−n(�∗k−1(�
∗k−1)
T )/k−n−2/Tk−n�
∗k−1ek
+(�∗k−1)
T Pk�∗k−1e
2k
= − e2k1+(�∗
k−1)T Pk−n�
∗k−1
+(�Tk−n(�k−1−�(k−1|k−n)))2. (37)
Due to the linear growth condition of nonlinearregressors in system (27) and the boundedness ofreference signal rk , two properties with respect to theaugmented regressor �k+n−1 in (32) can be obtainedfrom Lemma 2 and Lemma 7 in [11] as follows.
(a) �k+n−1=O[ek+n−1], namely, there exist posi-tive constants c1,c2 and k0 such that ‖�k+n−1‖≤c1maxi≤k+n−1 |ei |+c2, for all k≥k0;
(b) �k+n−1−�(k+n−1|k)=o[ek+n−1], namely,there exists a sequence satisfying limi→∞ �i →0and a constant k0 such that ‖�k+n−1−�(k+n−1|k)‖=�k+n−1maxi≤k+n−1 |ei |, for all k≥k0.
From properties (a) and (b), it is easy to see that�∗
k−1=O[ek−1]=O[ek]. Subsequently, the parametric
adaptation law (35)–(36) induces that /k =O[1], orfurthermore
�Tk−n(�k−1−�(k−1|k−n))=o[ek−1]=o[ek].
From (37), the nonnegative property of Vk implies that
e2k1+(�∗
k−1)T Pk−n�∗
k−1→0. (38)
Considering the Key Technical Lemma under the sectorcondition ‖�∗
k−1‖≤c1maxi≤k |ei |+c2, ek →0. Theproof is complete. �
� 2011 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control Society

Asian Journal of Control, Vol. 15, No. 1, pp. 1 11, January 2013
4.2.2 The control directions are unknown
In this case, the adaptive control design is amixture of the lifting and periodic updating algorithms.The classic Nussbaum gain method [10] is limitedto time-invariant scalar control gains. As we can seefrom the above reformulation with the lifting approach,the periodic input gain gok becomes the product oftwo vectors g and fk . To overcome this difficulty, weadopt periodic adaptations to deal with the periodicinput gains, meanwhile apply the lifting technique toconvert the remaining periodic parameters, hol,k , intotime-invariant �, as shown in (33). Note that �b isthe periodicity of gain function gok . Thus the periodicupdating mechanism for gok consists of �b elements,each is a constant with respect to the periodicity�b. Consequently the application of Nussbaum gainbecomes feasible. The proposed controller for this caseis a combination of the lifting technique and periodicadaptation, which is given in Appendix.
From the dynamics yk+n =�T�k+n−1+gokuk in(32), one can derive the ideal input
uk =−(gok )−1�T�k+n−1+(gok )
−1rk+n . (39)
Referring to (11), the lifting technique gives
uk =−�Tg �k+n−1+gT0 rk+n, (40)
where �g ∈R��b and g0∈R�b are time-invariantunknown vectors, �k+n−1 and rk+n�fkrk+n are thecorresponding regressors, satisfying
1
gT fk�T�k+n−1 = �T
g �k+n−1,
1
gT fkrk+n = gT0 rk+n .
Considering the prediction of �k+n−1 at step k, ˆ�(k+n−1|k), and the adaptation law of system uncertainties(A2) and (A3), the control law (40) can be revised into
uk =−�Tg (k) ˆ�(k+n−1|k)+ gT0 (k)rk+n. (41)
Substituting (41) into (32), the error dynamics is
ek+n = yk+n−rk+n
= �T�k+n−1−gok �Tg (k) ˆ�(k+n−1|k)
+gok gT0 (k)rk+n−rk+n
= −gok�Tg (k)�k+n−1+gok g
T0 (k)rk+n
−gok�k+n−1, (42)
where �k+n−1=�Tg (k) ˜�(k+n−1|k)��
Tg (k)( ˆ�(k+
n−1|k)−�k+n−1).
Theorem 3. Consider the adaptive closed-loop systemconsisting of the plant (27), adaptive control law (41),parameter updating law (A2)–(A3), future stateprediction law as given in [11]. All the signalsin the closed-loop system are guaranteed to bebounded and the tracking error ek converges to zeroasymptotically.
Proof. Considering the positive definite function
Vi,s
=n∑j=1
�Tg (�b(s−n+ j)+i)�g(�b(s−n+ j)+i)
+n∑j=1
gT0 (�b(s−n+ j)+i)g0(�b(s−n+ j)+i),
and applying the oscillating-unbounded sum prop-erty of discrete Nussbaum gain [10] for each i ,i =0,1, . . .,�b−1, yields the boundedness of Vi,sand i,s (defined in (A7)), and thus the boundednessof zi,s (defined in (A5)) which is a non-decreasingsequence.
The remaining part of proof is similar to that ofTheorem 1 in [11]. �
V. ILLUSTRATIVE EXAMPLE
Consider a three phase PWM AC-DC boost recti-fier, where the converter is feeding a resistive load [17].If zero-sequence voltage is assumed to be absent, thenthe system can be resolved into the positive and nega-tive rotating space vectors in the synchronous frame,respectively. If focusing on the positive part only, thesystem can be expressed in the rotating synchronousd-q frame
i pd = − R
Li pd +i pq + 1
Lepd − vdc
LS pd ,
i pq = − R
Li pd +i pq + 1
Lepq − vdc
LS pq ,
(43)
where the variables i pd (i pq ) and S pd (S p
q ) denote thecurrent and the average switching function in the d (q)-direction of positive rotating space, and the constantsR, L, represent the resistance, the inductance, and
� 2011 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control Society
Asian Journal of Control, Vol. 14, No. 2, pp. 373–383, March 2012
D. Huang and J.-X. Xu: Discrete-Time Adaptive Control for Nonlinear Systems
the current frequency respectively. Moreover, thesupply voltage epd or epq is composed of fundamentalvoltage component and all the higher-order harmonics.Specifically,
epd =√6
2E p1 sin(�
p1 )
+∞∑n=1
∑l=6n±1
√6
2E pl sin(6nt+�p
l ),
epq =√6
2E p1 cos(�
p1 )
+∞∑n=1
∑l=6n±1
√6
2E pl cos(6nt+�p
l ),
where E pl is the amplitude and �p
l is the angle offset.In (43), L and are available, and the dc link voltagevdc is maintained constant at the demanded value,while R and voltages epd , e
pq are taken as parametric
uncertainties. In order to apply the proposed algorithm,we consider the tracking control problem of (43) byregarding S and i as system input and output respec-tively. Due to the structural similarity between the twoequations of (43), we design the tracking control for thed-direction only. When taking the first two harmonicsinto account only in the first equation of (43), it can befurther simplified as follows,
i pd �(ho)T n+ S pd (t), (44)
where ho=[R√62 E p
1 sin(�p1 )
∑l=5,7
√62 E p
l sin(6tk+�pl );∑
l=11,13
√62 E p
l sin(12t+�pl )]T , n=[−i pd /L1/L1/
L1/L]T , and S pd (t)=i pq − vdc
L S pd is the virtual input.
Letting the sampling time be Ts , the system (44) canbe approximated by the discrete-time system
i pd,k+1= (hok)T nk+uk (45)
where hok =[R√62 E p
1 sin(�p1 )
∑l=5,7
√62 E p
l sin(6Tsk+�pl ),
∑l=11,13
√62 E p
l sin(12Tsk+�pl )]T , nk=Ts [−i pd,k/
L1/L1/L1/L]T , and uk =Ts Spd (Tsk)+i pd,k . Obviously,
(45) takes the standard form of (9).Choose the parameters as Ts =1/3,000; s, =
100�; rad/s, vdc=100; V, R=0.3; �, L=0.005; H,
E p1 =3, E p
5 =0.4, E p7 =0.8, E p
11=0.3, E p13=0.2, �p
1 =�/4, �p
5 =�p11=�/6, �p
7 =�p13=�/3. Then, the periods
of the four unknown parameters in hok are 1, 1, 10,
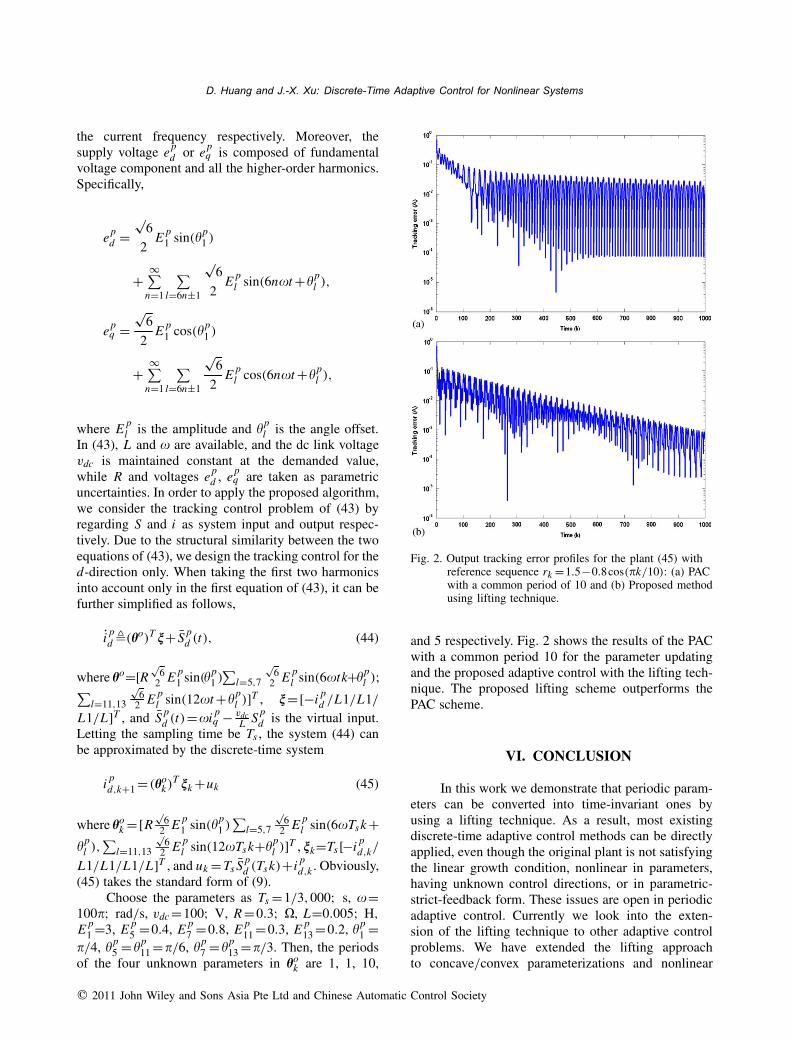
Fig. 2. Output tracking error profiles for the plant (45) withreference sequence rk =1.5−0.8cos(�k/10): (a) PACwith a common period of 10 and (b) Proposed methodusing lifting technique.
and 5 respectively. Fig. 2 shows the results of the PACwith a common period 10 for the parameter updatingand the proposed adaptive control with the lifting tech-nique. The proposed lifting scheme outperforms thePAC scheme.
VI. CONCLUSION
In this work we demonstrate that periodic param-eters can be converted into time-invariant ones byusing a lifting technique. As a result, most existingdiscrete-time adaptive control methods can be directlyapplied, even though the original plant is not satisfyingthe linear growth condition, nonlinear in parameters,having unknown control directions, or in parametric-strict-feedback form. These issues are open in periodicadaptive control. Currently we look into the exten-sion of the lifting technique to other adaptive controlproblems. We have extended the lifting approachto concave/convex parameterizations and nonlinear
� 2011 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control Society
Asian Journal of Control, Vol. 15, No. 1, pp. 1 11, January 2013
growth conditions to first-order systems and furtherextension to higher-order systems is under exploration.Extension to multiple-input multiple-output systems isalso under exploration.
APPENDIX A: PARAMETRICADAPTATION LAWS
Assuming k=�bs+i, i =0,1, . . .,�b−1, theparameter estimates in the control law are updated withrespect to s by the following update law:
�i,s = �e�b(s−n)+n+i +Ni,s�i,s�i,s
Gi,s, s≥0,
(A1)
�g(�bs+i) = �g(�b(s−n)+i)
+�Ni,s
Di,s��b(s−n)+n+i−1�i,s , (A2)
g0(�bs+i) = g0(�b(s−n)+i)
−�Ni,s
Di,sr�b(s−n)+n+i �i,s, (A3)
�g( j) = 0��b , g0( j)=0�b ,
j = 0,−1, . . .,−�bn+1,
�i,s � �(�b(s−n)+n+i),
zi,s � z(�b(s−n)+n+i),
��i,s = �i,s+1−�i,s =−Ni,s�i,s�i,s
Di,s, (A4)
�zi,s = zi,s+1−zi,s =Gi,s�2i,sDi,s
, zi,−1=0, (A5)
�i,s = �(�b(s−n)+n+i−1) (A6)
= �Tg (�b(s−n)+i)×
˜�(�b(s−n)+n+i−1|�b(s−n)+i),
Ni,s = N(i,s), i,s = zi,s+�2i,s
2, (A7)
Gi,s = 1+|Ni,s |, (A8)
Di,s = (1+|�i,s |)(1+N3i,s )
×(1+‖��b(s−n)+n+i−1‖2
+‖r�b(s−n)+n+i‖2+�2i,s+�2i,s),
where �i,s are introduced as augmented errors, �>0is the tuning parameter, and N(i,s) is the discrete
Nussbaum gain defined to be
N(i,s)= i,s N (i,s), i,s = sups′≤s
{i,s′ }
and N (i,s) is the sign function of the discrete Nuss-baum gain, i.e. N (i,s)=±1.
REFERENCES
1. Xu, J.-X. et al., “A modular control schemefor PMSM speed control with pulsating torqueminimization,” IEEE Trans. Ind. Electron., Vol. 51,No. 3, pp. 526–536 (2004).
2. Pagilla, P. R. et al., “Adaptive control oftime-varying mechanical systems: analysis andexperiments,” IEEE/ASME Trans. Mechatron.,Vol. 5, No. 4, pp. 410–418 (2000).
3. Carrasco, J. M. et al., “Analysis and experimen-tation of nonlinear adaptive controllers for the seriesresonant converter,” IEEE Trans. Power Electron.,Vol. 15, No. 3, pp. 536–544 (2000).
4. Kaneko, K. and R. Horowitz, “Repetitive andadaptive control of robot manipulators with velocityestimation,” IEEE Trans. Robot. Autom., Vol. 13,No. 2, pp. 204–217 (1997).
5. Wang, Z. et al., “Adaptive control of water quality inwater distribution networks,” IEEE Trans. ControlSyst. Technol., Vol. 14, No. 1, pp. 149–156(2006).
6. Abidi, K. and J.-X. Xu, “A discrete-time periodicadaptive control approach for time-varyingparameters with known periodicity,” IEEE Trans.Autom. Control, Vol. 53, No. 2, pp. 575–581 (2008).
7. Huang, D. et al., “A discrete-time periodicadaptive control approach for parametric-strict-feedback systems,” Proc. IEEE Conf. Decis.Control, Shanghai, China, pp. 6620–6625 (2009).
8. Fu, S. H.-S. and C.-C. Cheng, “Direct adaptivefeedback design for linear discrete-time uncertainsystems,” Asian J. Control, Vol. 6, No. 3, pp. 421–427 (2004).
9. Yeh, P.-C. and P. V. Kokotovic, “Adaptive controlof a class of nonlinear discrete-time systems,” Int.J. Control, Vol. 62, pp. 303–324 (1995).
10. Lee, T. H. and K. S. Narendra, “Stable discreteadaptive control with unknown high-frequencygain,” IEEE Trans. Autom. Control, Vol. 31, No. 5,pp. 477–478 (1986).
11. Ge, S. S. et al., “Adaptive robust control of a classof nonlinear strict-feedback discrete-time systems
� 2011 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control Society
Asian Journal of Control, Vol. 14, No. 2, pp. 373–383, March 2012
D. Huang and J.-X. Xu: Discrete-Time Adaptive Control for Nonlinear Systems
with unknown control directions,” Syst. ControlLett., Vol. 57, No. 11, pp. 888–895 (2008).
12. Loh, A. P. et al., “Adaptive control of discrete timesystems with concave/convex parametrizations,”IEEE Trans. Autom. Control, Vol. 48, No. 6,pp. 1069–1072 (2003).
13. Kanellakopoulos, I. “A discrete-time adaptivenonlinear system,” IEEE Trans. Autom. Control,Vol. 39, No. 11, pp. 2362–2365 (1994).
14. Zhang, Y. et al., “Improved robust backsteppingadaptive control for nonlinear discrete-time systemswithout overparameterization,”Automatica, Vol. 44,pp. 864–867 (2008).
15. Yang, C. et al., “Output feedback NN controlfor two classes of discrete-time systems withunknown control directions in a unified approach,”IEEE Trans. Neural Netw., Vol. 19, No. 11,pp. 1873–1886 (2008).
16. Zhang, Y. et al., “Robust adaptive control ofnonlinear discrete-time systems by backsteppingwithout overparameterization,”Automatica, Vol. 37,pp. 551–558 (2001).
17. Wu, X. H. et al., “Design of a plug-in repetitivecontrol scheme for eliminating supply-side currentharmonics of three-phase PWM boost rectifiersunder generalized supply voltage conditions,”IEEE Trans. Power Electron., Vol. 25, No. 7,pp. 1800–1810 (2010).
Deqing Huang received hisBachelor and PhD degrees fromMathematical College SichuanUniversity, China in 2002 and2007 respectively. Currently he isa PhD student at the Departmentof Electrical and Computer Engi-neering, National University ofSingapore. His research interestslie in the area of iterative learning
control, adaptive control, and servo control.
Jian-Xin Xu received his Bach-elor degree from Zhejiang Univer-sity, China in 1982. He attendedthe University of Tokyo, Japan,where he received theMaster’s andPhD degrees in 1986 and 1989respectively. All degrees are inElectrical Engineering. He workedfor one year in the Hitachi researchLaboratory, Japan; for more than
one year in Ohio State University, U.S.A. as a visitingscholar; and for 6 months in Yale University as a visitingresearch Fellow. In 1991 he joined the National Univer-sity of Singapore, and is currently a professor in theDepartment of Electrical and Computer Engineering.He is a senior member of IEEE.
� 2011 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control Society
Related Documents











