IEEE TRANSACTIONS ON ACOUSTICS, SPEECH, AND SIGNAL PROCESSING, VOL. 38, NO. 2, FEBRUARY 1990 317 Direction-of-Arrival Estimation for Wide-Band Signals Using the ESPRIT Algorithm BJORN OTTERSTEN, MEMBER, IEEE, AND THOMAS KAILATH, FELLOW, IEEE Abstract-A new direction-of-arrival (DOA) estimation algorithm is proposed that applies to wide-band emitter signals. A sensor array with a translation invariance structure is assumed, and an extension of the ESPRIT algorithm for narrow-band emitter signals is obtained. Fol- lowing the ideas of Su and Morf [I], the emitter signals are modeled as the stationary output of a finite dimensional linear system driven by white noise. The array response to a unit impulse from a given direc- tion is represented as the impulse response of a linear system. The mea- sured data from the sensor array can then be seen as the output of a multidimensional linear system driven by white noise sources, and cor- rupted by additive noise. The emitter signals and the array output are characterized by the modes of the linear system. The ESPRIT algo- rithm is applied at the poles of the system, the power of the signals sharing the pole is captured, and the effect of noise is reduced. The algorithm requires no knowledge, storage, or search of the array man- ifold, as opposed to wide-band extensions of the MUSIC algorithm. This results in a computationally efficient algorithm that is insensitive to array perturbations. Simulations are presented comparing the wide- band and ESPRIT algorithm to the modal signal subspace method and the coherent signal subspace method. I. INTRODUCTION EVERAL high-resolution parameter estimation meth- S ods have been proposed in recent years within the field of sensor array processing. We shall consider the direc- tion-of-arrival estimation problem for an antenna array that is composed of two identical subarrays displaced rel- ative to each other by a known distance and direction. Apart from this assumption, the array can be completely general, and furthermore, no knowledge of the antenna gain and phase patterns is required. The geometry of the array need not be known as long as the above assumption holds. Previous work within the field of direction-of-arrival estimation has focused on narrow-band signals where it is assumed that the power of all emitter signals is concen- trated in the same narrow frequency band. For such sig- nals, spectral estimation techniques were among the first methods used to determine the directions-of-arrival of multiple emitter signals impinging on an array. Parameter estimation techniques developed in time series analysis were subsequently applied, e.g., Capon’s ML method [2] and Burg’s ME method [3]. However, these methods did not exploit the underlying data model for the sensor array problem. Manuscript received February 2, 1988; revised March 29. 1989. The authors are with the Information Systems Laboratory, Stanford Uni- IEEE Log Number 8932770. versity, Stanford, CA 94305. The signal subspace methods introduced by Schmidt [4] and Bienvenu and Kopp [5] were the first estimation tech- niques to attempt to more fully exploit the underlying data model, extending and generalizing a harmonic retrieval technique introduced by Pisarenko [6]. The MUSIC al- gorithm developed by Schmidt is a signal subspace method that is based on a nice geometric interpretation of the DOA problem. The MUSIC algorithm requires full knowledge of the array manifold, i.e., the gain and phase patterns of the sensors and the geometry of the array. The array must be precisely calibrated, a process that is expensive, re- quires large amounts of data storage, and is often very difficult. In addition, a computationally expensive search of the array manifold is required to determine the MUSIC spectrum from which the angles of arrival are estimated. The introduction of the ESPRIT algorithm [7]-[9] has made signal subspace methods more attractive for imple- mentation. By assuming a certain array structure, many of the practical problems encountered with MUSIC such as computational load, storage, and finite-sample bias are reduced. In particular, the array manifold need not be known and the search procedure is replaced by an eigen- value problem. The estimates obtained with ESPRIT ap- pear to be unbiased for finite data lengths. Simulation re- sults suggest that this algorithm is more robust with respect to array perturbations than MUSIC, which de- pends highly on accurate knowledge of the array manifold and is therefore sensitive to mismodeling. Reference [lo] provides a detailed study of these issues. There are fewer results available for estimating the di- rections-of-arrival for wide-band emitter signals. Narrow- band signal subspace methods have been adapted to wide- band emitter signals by several investigators [ 111-[ 131. In these methods, the wide-band signal is decomposed into several narrow-band frequency bins where a narrow-band algorithm is applied. Several costly searches have to be performed and the power of the emitter signal is not uti- lized effectively. An alternative representation of wide- band signals was recently proposed in [14], [15] based on a low-rank characterization of the signal in a higher di- mensional space, one of dimension (number of sensors x number of delayed outputs). This is a computationally costly method but shows promising results. The methods that this paper focuses on are briefly described below, before turning to an adaptation of ESPRIT for such prob- lems. 0096-3518/90/0200-0317$01.00 O 1990 IEEE

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
IEEE TRANSACTIONS ON ACOUSTICS, SPEECH, AND SIGNAL PROCESSING, VOL. 38, NO. 2, FEBRUARY 1990 317
Direction-of-Arrival Estimation for Wide-Band Signals Using the ESPRIT Algorithm
BJORN OTTERSTEN, MEMBER, IEEE, AND THOMAS KAILATH, FELLOW, IEEE
Abstract-A new direction-of-arrival (DOA) estimation algorithm is proposed that applies to wide-band emitter signals. A sensor array with a translation invariance structure is assumed, and an extension of the ESPRIT algorithm for narrow-band emitter signals is obtained. Fol- lowing the ideas of Su and Morf [I], the emitter signals are modeled as the stationary output of a finite dimensional linear system driven by white noise. The array response to a unit impulse from a given direc- tion is represented as the impulse response of a linear system. The mea- sured data from the sensor array can then be seen as the output of a multidimensional linear system driven by white noise sources, and cor- rupted by additive noise. The emitter signals and the array output are characterized by the modes of the linear system. The ESPRIT algo- rithm is applied at the poles of the system, the power of the signals sharing the pole is captured, and the effect of noise is reduced. The algorithm requires no knowledge, storage, or search of the array man- ifold, as opposed to wide-band extensions of the MUSIC algorithm. This results in a computationally efficient algorithm that is insensitive to array perturbations. Simulations are presented comparing the wide- band and ESPRIT algorithm to the modal signal subspace method and the coherent signal subspace method.
I. INTRODUCTION EVERAL high-resolution parameter estimation meth- S ods have been proposed in recent years within the field
of sensor array processing. We shall consider the direc- tion-of-arrival estimation problem for an antenna array that is composed of two identical subarrays displaced rel- ative to each other by a known distance and direction. Apart from this assumption, the array can be completely general, and furthermore, no knowledge of the antenna gain and phase patterns is required. The geometry of the array need not be known as long as the above assumption holds.
Previous work within the field of direction-of-arrival estimation has focused on narrow-band signals where it is assumed that the power of all emitter signals is concen- trated in the same narrow frequency band. For such sig- nals, spectral estimation techniques were among the first methods used to determine the directions-of-arrival of multiple emitter signals impinging on an array. Parameter estimation techniques developed in time series analysis were subsequently applied, e.g., Capon’s ML method [2] and Burg’s ME method [3]. However, these methods did not exploit the underlying data model for the sensor array problem.
Manuscript received February 2, 1988; revised March 29. 1989. The authors are with the Information Systems Laboratory, Stanford Uni-
IEEE Log Number 8932770. versity, Stanford, CA 94305.
The signal subspace methods introduced by Schmidt [4] and Bienvenu and Kopp [5] were the first estimation tech- niques to attempt to more fully exploit the underlying data model, extending and generalizing a harmonic retrieval technique introduced by Pisarenko [6]. The MUSIC al- gorithm developed by Schmidt is a signal subspace method that is based on a nice geometric interpretation of the DOA problem. The MUSIC algorithm requires full knowledge of the array manifold, i.e., the gain and phase patterns of the sensors and the geometry of the array. The array must be precisely calibrated, a process that is expensive, re- quires large amounts of data storage, and is often very difficult. In addition, a computationally expensive search of the array manifold is required to determine the MUSIC spectrum from which the angles of arrival are estimated.
The introduction of the ESPRIT algorithm [7]-[9] has made signal subspace methods more attractive for imple- mentation. By assuming a certain array structure, many of the practical problems encountered with MUSIC such as computational load, storage, and finite-sample bias are reduced. In particular, the array manifold need not be known and the search procedure is replaced by an eigen- value problem. The estimates obtained with ESPRIT ap- pear to be unbiased for finite data lengths. Simulation re- sults suggest that this algorithm is more robust with respect to array perturbations than MUSIC, which de- pends highly on accurate knowledge of the array manifold and is therefore sensitive to mismodeling. Reference [lo] provides a detailed study of these issues.
There are fewer results available for estimating the di- rections-of-arrival for wide-band emitter signals. Narrow- band signal subspace methods have been adapted to wide- band emitter signals by several investigators [ 1 11-[ 131. In these methods, the wide-band signal is decomposed into several narrow-band frequency bins where a narrow-band algorithm is applied. Several costly searches have to be performed and the power of the emitter signal is not uti- lized effectively. An alternative representation of wide- band signals was recently proposed in [14], [15] based on a low-rank characterization of the signal in a higher di- mensional space, one of dimension (number of sensors x number of delayed outputs). This is a computationally costly method but shows promising results. The methods that this paper focuses on are briefly described below, before turning to an adaptation of ESPRIT for such prob- lems.
0096-3518/90/0200-0317$01.00 O 1990 IEEE
318 IEEE TRANSACTIONS ON ACOUSTICS, SPEECH, AND SIGNAL PROCESSING, VOL. 38, NO. 2, FEBRUARY 1990
A. Rational Signal Subspace Methods Two methods based on the rational signal subspace
model were proposed by Su and Morf in [12], [l]. The output of the sensor array is modeled as the output of a multidimensional linear system driven by white noise sources. A generalized signal subspace and array mani- fold are defined which have the same properties as the conventional signal subspace and array manifold, but are formulated in a rational vector space framework.
In the unit circle eigendecomposition rational signal subspace (UCERSS) algorithm, the narrow-band MUSIC estimation procedure is performed at discrete frequencies (frequency binning). In the frequency domain, this can be seen as evaluating the spectral density function along the unit circle. The signal subspace is estimated at each fre- quency and the array manifold is searched. The estimates from different frequency bands are then clustered to ob- tain refined estimates of the DOA’s. It can be seen that this is a natural extension of MUSIC to wide-band sig- nals; the output of the array sensors is narrow-band fil- tered and the narrow-band DOA estimation procedure is applied.
The modal decomposition signal subspace (MDSS) al- gorithm uses the fact that the output of the array at the system poles is characterized by the emitters sharing that pole. The column space of the residue matrices at the sys- tem poles span the signal subspace corresponding to the emitters sharing that pole. By decomposing the emitter signals in this manner, more sources can be resolved than the number of sensors in the array. The number of sources that can be resolved at a pole is limited by the number of sensors.
This approach provides an appealing parametrization of wide-band signals based on the modal decomposition of the output of the array, as opposed to decomposing the response into frequency bins. In addition, under the as- sumption that the noise shares no modes with the emitters, no knowledge of the noise covariance is required. The modeling ideas of this method are used in the extended ESPRIT algorithm.
B. The Coherent Signal Subspace Method
In the coherent signal subspace (CSS) method proposed by Wang and Kaveh [16], an FFT is performed on the output of the array and the covariance is estimated in dif- ferent frequency bins. The signal subspaces at discrete frequencies can be ,related via linear transformations that depend on the array manifold which, in turn, depends on the frequency and angles of arrival. If these transforma- tions were known a priori, the covariance estimates at different frequencies could be combined into one estimate and the coherent signal subspace could be estimated at that specific frequency.
The transformation matrices are approximated using initial estimates of the DOA’s and knowledge of the array manifold; see, e.g., [17], [18]. A coherent signal sub- space is computed from a covariance which is an average
of covariance estimates at different frequencies. With an estimate of the signal subspace thus obtained, the normal spatial (MUSIC) spectrum is computed from which the angles of arrival are determined. Correlated sources can be handled since the coherent signal subspace will have rank equal to the number of incoming wavefronts. This is a result of the subspace averaging. The CSS method has been shown [ 161, [ 191 to improve detection and resolution thresholds compared to the frequency binning techniques. However, this method requires initial estimates of the an- gles of arrival, knowledge of the noise covariance, and the array characteristics must be known over the param- eter space and frequency range of interest. The number of emitters that can be resolved is limited by the number of sensors in the array, unless there is no spectral overlap between some emitters, a disadvantage not shared by the modal decomposition modeling method.
C. The Extended ESPRIT Algorithm
There are many practical difficulties with the wide-band algorithms proposed above. The sensor array response must be known for the frequency range of interest. This is commonly obtained by calibrating the array and storing the measured response. In the MDSS algorithm, a de- scription of the array in the frequency domain is needed to determine the array manifold at the poles of the system. To determine the angles of arrival in the methods above, a costly search of the array manifold must be performed.
This paper extends the narrow-band ESPRIT algorithm in a framework based on the modeling ideas of the MDSS algorithm developed by Su and Morf [l]. Not only do we obtain the basic advantages of both ESPRIT and MDSS, but simulation studies show comparable performance to the Root-MUSIC-based MDSS algorithm.
In Section 11, the wide-band DOA problem is presented in the rational signal subspace framework. The invariance of the signal subspace is described in Section 111. Section IV details the extended ESPRIT algorithm, and Section V presents simulation results comparing the performance of the proposed algorithm to MDSS and CSS. The discus- sions in Section VI conclude the paper.
11. PROBLEM FORMULATION
Consider multiple wide-band emitter signals impinging on an array. The objective is to estimate the directions of the incoming wavefronts given the output of a sensor ar- ray. For wide-band signals, the time-varying properties of the phase and amplitude modulation of the emitter sig- nal are comparable to the propagation time across the ar- ray. The emitters are assumed to be in the far field, and thus the incoming waves are considered to be planar. The array output is corrupted by additive noise which is as- sumed to be uncorrelated with the emitter signals. The rational model is based on the further assumption that the emitter signals and the sensor array response can be mod- eled as the stationary output of a finite dimensional linear system driven by white noise.

OTTERSTEN AND KAILATH: DOA ESTIMATION FOR WIDE-BAND SIGNALS 319
Two identical sensor arrays are assumed with a known constant displacement between the subarrays. The direc- tions-of-arrival are related to the normal of this displace- ment vector. Let m be the number of sensors per subarray, resulting in a total of 2m sensors, and let d denote the number of signals impinging on the array. Let a , ( k , 6,) be the response of the i th sensor to a unit impulse arriving from direction 6, where k is a discrete time index. The impulse response has a rational 2 transform a, ( z , 0,) un- der the assumption that it is the output of a rational sys- tem. This is a rational transfer function that possibly in- cludes poles and zeros, which can be introduced when modeling the antenna receiving equipment. The responses from the m elements of the first subarray are collected in a vector
a ( z , = [ a l ( Z 9 ' J ) , * 9 a , ( z 7 ' J ) ] " ( I )
The steering vector a ( z , 6,) is a vector in an m-dimen- sional rational vector space. The collection of steering vectors a ( z , 0) for all 6 E 8 where 8 is the parameter set of interest is called the generalized array manifold. The dimension of the array manifold is defined as the largest integer r such that for any set of r distinct 8, E 8, j = 1,
- * , r , the corresponding steering vectors { a ( z , e , ) , - - , a ( z , e , ) } are linearly independent. Similarly, the local dimension of the array manifold at a point zl in the complex plane is the largest r, such that for any set of r, distinct 6, E 8, j = 1 , * - * , r,, the corresponding steering vectors evaluated at 2, are linearly independent. The array manifold is said to have full dimension when it has di- mension m. The subarrays are assumed to have full di- mension. The manifolds of the two subarrays are linearly dependent, a fact that we shall exploit to obtain estimates of the directions-of-arrival.
I ) Data Model: Let x ( k ) and y ( k ) be the outputs of the two subarrays. The signals received by the ith ele- ments of the two identical arrays is expressed as
d = O J ) * s J ( k ) + n X l ( k ) ,
J = 1
By assumption, s , ( z ) , j = 1, * - - , d , are all rational; it is also assumed that the 2 transforms of the noise se- quences n,, (2 ) and nyr ( 2 ) are rational.
Let the propagation between the two sensor arrays be described by the delay operator D ( z , t,) where €, is the propagation delay between the arrays for the j th source. The angle 6, of the j th incoming wavefront relative to the normal of the displacement vector determines the propa- gation delay between the subarrays, and this relation is described by
Ctj sin 6, = -
A where c is the propagation velocity and A is the length of the displacement vector. Thus, if t, can be estimated, the corresponding angle of arrival is dstermined by the above equation.
(4)
In vector notation, (3) can now be written as
x(z) = A ( z ) s ( z ) + n,(z) Y W = A ( z ) @ ( z ) s ( z ) + ny(z) ( 5 )
where
A ( z ) = [ a ( z , ' ' * 7 a(2, e,)] @ ( z ) = diag [ D ( z , t l ) , - - - , D ( z , id)].
111. SIGNAL SUBSPACE INVARIANCE To make the connection to narrow-band terminology,
we shall define a generalized fignal subspace and noise subspace, and follow the argument used in [lo]. Let
( 6 )
z ( z ) = [x'(2)rT(z)lT, (7) so that
The spectral density of the output of the array can be ex- pressed as
+ W ) where * denotes convolution and sj ( k ) denotes the j t h emitter signal. The description of the propagation of the j t h emitter signal between the arrays is incorporated in the response E j ( k , O j ) . The additive noise sequences n, i (k) and nyi ( k ) are uncorrelated with the emitter signals. Ex- pressing the above equations in the frequency domain, we obtain
since the noise is assumed uncorrelated with the emitter signals. In this notation, p ( z ) is the spectral density of the emitter density Of the additive noise. The generalized signal subspace is defined as the space spanned by the columns of
and Nz (2) is the
d P( z ) is assumed to have full rank d , which means that no emitter signal can be completely reconstructed given the other emitter signals. A ( z ) is m x d and ha6 rank d if the ( 3 ) Yi(z) = ,z ai(Z, e j ) s j ( z ) + n y i ( ~ ) *
J = I

320 IEEE TRANSACTIONS ON ACOUSTICS, SPEECH, AND SIGNAL PROCESSING, VOL 38. NO. 2 , FEBRUARY 1990
number of sensors in a subarray is no less than the number of emitters (m 2 d ), and if the array manifold has full dimension. Thus, the signal subspace is a d-dimensional subspace in a 2m-dimensional rational vector space. The noise subspace is defined as the orthogonal complement of the signal subspace. It follows that the eigenvectors of the noise free spectral density S N F ( z ) = S z z ( z ) - N z ( z ) corresponding to the nonzero eigenvalues will span the signal subspace. Let [ E r ( z ) E ; ( z ) l T be the eigenvectors of S,( z ) corresponding to the nonzero eigenvalues. Since P ( z ) is the full rank and since [ E T ( z ) E ; ( z ) l T and [ A T ( z ) m T ( z ) A T ( z ) I T span the same space, there exists a full rank d X d matrix T(z) such that
By eliminating A ( z ) in (1 l ) , Ehe following expression is obtained:
E2 (z) = El ( z ) T-' ( z ) @ ( z ) T ( z ) . (12)
Thus, the eigenvalues of the operator Y that transforms E l ( z ) to E 2 ( z ) correspond to the diagonal elements of
By choosing different values of z we can come up with different schemes for determining the angles of amval. If the points are chosen along the unit circle z = elwn, the data are effectively narrow-band filtered and ESPRIT is performed on the narrow-band data. This corresponds to frequency binning. The propagation between the subar- rays in this case is described by D(eJw", t d ) = ejwntd.
In the algorithm proposed by Su and Morf [ 13, the MU- SIC algorithm is applied at the poles of the multidimen- sional system. This requires both knowledge of the array manifold in the desired frequency range, and an accurate model of the array response in the frequency domain for determination of the array manifold at the system poles. By applying the ESPRIT algorithm, no knowledge and consequently no storage of the array manifold is needed, and errors due to mismodeling are not introduced. The output of the sensor array at the system poles is charac- terized by the emitters sharing that pole. With exact knowledge of the system at the poles, the influence of noise and emitters not sharing that pole vanishes. The idea is to capture the power of the emitter signal which is spread out over several frequency bands, whereas the nar- row-band filtering technique only uses the power of the emitters in a single frequency band. The focusing tech- nique in the CSS method also attempts to collect the emit- ter signal power into one coherent signal subspace. As mentioned earlier, this requires some additional assump- tions and computation, and is sensitive to the spectral content of the emitter signals.
I ) Modal Decomposition Invariance Approach: Let p , , i = 1, - * * , M, be the poles of P ( z ) . In [l], it is shown that the propagation of the ith modal component of the j t h emitter signal can be described by pfj . This gives us
@(Z).
the following relationship:
It is assumed that the linear systems describing the emitter signals have only simple poles. Let d, be the number of emitters sharing the ith pole. It is also assumed that the noise model and array manifold have a total of N simple polesp,, i = M + 1, - * - , M + N, and share no poles with the emitters. The condition of simple poles can be relaxed, see [ 11. However, choosing models with nondis- tinct poles will tend to be less robust and should be avoided. If the noise model does share poles, the noise spectral density must be known, but for simplicity in this analysis we shall assume that the above assumptions hold. The spectral density of the output of the array has the poles p , and p;", i = l , * - * , M + N . The modal de- Composition of the spectral density will have the form
M + N
1 - p * z
where Ri is a 2m X 2m residue of the ith pole and W ( z ) is the spectral density of a moving average term. Hermi- tian transpose is denoted by *. Each residue R; is given by
R, = lim (1 - p i z - ' )S , ( z ) . (15) Z'P,
Each row of P ( z ) = E{ s ( z ) s T ( z - ' ) } can be associated with an emitter. Now, let P 1 l 2 ( z ) be a stable, full rank, minimum phase spectral factor of P ( z ) . If the kth emitter does not share the ith pole, the kth row of
lim ( I - p ; z - ' ) ~ ( z ) Z + P #
= Z'P, lim (1 - ~ ~ z - ' ) P ' / ~ ( z ) P ~ / ~ ( z - ' ) (16)
will be zero. Let i = 1, * * , M, be the nonzero rows of limz-+p,( 1 - ~ ~ z - ~ ) P ' / ~ ( z ) . And let Ji be a d ; X d selection matrix such that
P,! /2 = Ji lim (1 - ~ ~ z - ' ) P ] / ~ ( z ) . (17) Z - p i
It is possible to show that
[ A T ( p , ' ) @ ( p Y 1 ) A T ( p ; ' ) ] i = 1, - * - , M
(18 )
where A, = A ( p , ) J T and @, = J, Q, ( p , ) J T . Since the poles and zeros of P 1 l 2 ( z ) are assumed to be within the unit circle, P T / 2 ( p ; ' ) will always be of rank d. We also assume that the rank of [ A T ( p ; ' ) @ ( p , ~ ' ) A T ( p , - ' ) ] is

OTTERSTEN AND KAILATH: DOA ESTIMATION FOR WIDE-BAND SIGNALS 32 1
always greater than or equal to d , . Thus, from (18), we see that the column space of Ri is spanned by
Estimate the covariance of the output of the array. Estimate the system poles and residues. Determine the dimension of the signal subspace at
Estimate the operator that maps the columns of E;' (19) the system poles and find vectors that span this space.
Pi/* is dj X d and full rank by assumption and the local dimension of the array manifold is assumed to be larger than d i , so consequently Ri is of rank d i .
Note that when the emitter signals are uncorrelated, P ( z ) is diagonal. Using the same arguments as above, it is possible to show that the row space of R; is spanned by --
(20) Thus, the row space possesses the same invariance struc- ture as the column space, but evaluated at p,:'. For un- correlated sources, this additional structure can be ex- ploited to obtain more accurate DOA estimates.
The left singular vectors [EA ELIT of the residue at the i th pole corresponding to the nonzero singular values will span the modal signal subspace. Thereby, from (19), we see that there exists a full rank d; X di matrix Tj such that
Eliminating Ai in (21) results in the expression
onto E j 2 .
poles, estimate the angles of arrival.
A. Overdetermined Yule- Walker Equations for Pole Estimation
There are several techniques that have been discussed in the literature for estimating the poles pi and residues Ri of a multidimensional linear system. The pole and residue estimation techniques described below appear in [ 11, as well as a more detailed discussion on the subject.
With the previously stated assumptions, the modal de- composition of the spectral density is given by
From the eigenvalues of the operator and the system
Recall that if Ck = CTk = E { z ( 1 ) z T ( 1 - k ) } is the kth lag covariance matrix, then
m
S,(z) = k = c - a Ckz-k. (25)
Estimating the poles of the linear system in an optimal sense (maximum likelihood) is, in general, a difficult problem. The model contains zeros as well as poles, and this leads to an optimization problem which is highly non-
E12 = E, I T,- ' T, . (22)
Thus, the eigenvalues of the operator that maps the col- umns of Eil onto E12 correspond to the diagonal elements pi' of m I . With knowledge of these eigenvalues and the corresponding pole, the time delays t, , j = 1 , * * * , d,
linear in the model parameters. A method often used for pole estimation and the one used in the simulations pre- sented is provided by the overdetermined Yule-Walker equations. It is a suboptimal method that involves solving an overdetermined set of linear equations.
Equate the causal parts in (24) and (25) to obtain can be estimated. Equation (13) gives the following re- lationship for determining the angles of arrival for the emit- ters sharing the ith pole:
M + N m
R1 + W c ( z ) = c CkZpk (26) k = O
c r = l 1 - p,z-'
where W ' ( z ) is the causal part of W ( z ) . Multiplying both sides by d ( z ) = IIf"=:"( 1 - p , z - I ) and identifying coef- ficients corresponding to z - of degree larger than the largest degree I,,, occurring in W'( z ) d ( z ) results in
0, = sin-' (:) j = 1 , - , d, . (23)
To avoid ambiguity problems, we shall require that A I c/fs where f , is the sampling frequency. CI + G + I di + * * + C I + M + N ~ M + N = 0
IV. EXTENDED ESPRIT ALGORITHM 1 = I,,, + 1 , I,,, + 2, - (27) The preceding sections have laid the basis for the pre-
sentation of the extended ESPRIT algorithm. The output of the sensor array is modeled as the output of a multidi- mensional linear system driven by white noise sources. The residue at a pole of the system spans the modal signal subspace of the emitters sharing that pole. We have also noted that this subspace has the invariance structure ex- ploited by the ESPRIT algorithm in determining the di- rections-of-arrival. The basic steps in the algorithm are as follows.
where
. (28) - ( M + N ) d ( z ) = 1 + d l z - ' + * + d M + N Z
Equation (27) can be solved in a least :quares sense given estimates of the covariance matrices ck. The poles of the system are the roots of the polynomial d ( z ) .
B. Residue Estimation Given the poles of the system, the residues of the sys-
tem can be estimated in the following manner. Expanding
the denominator polynomial in (24) in z and z- ' and com- paring coefficients of powers of z-' to (25), the following set of equations is obtained:
RIP; + * * -t RM+NPL+N = Cr
r = rmx + 1, rmx + 2 , - - ( 2 9 )
where r,,, is the highest degree of z-' in W ( z ) . Given estimates of the system poles and covariance matrices, the residues can be obtained from a least squares solution of the set of linear equations in (29) . It should be noted that this estimation procedure degrades as l,,, and r,,, be- come large or, in other words, as the number of zeros and poles in the model increase. This will be discussed in more detail in the simulation section.
C. Total Least Squares (TLS) ESPRIT
Once estimates of the residues are obtained, vectors that span the signal subspace are estimated. The dimension dl of the signal subspace at the system pole pl must be de- termined. This is a detection problem and is decoupled with the estimation problem in this algorithm. The num- ber of signals can be estimated by a statistical test on the rank of the residues. The minimum description length cri- terion [20] can be modified for this application. We as- sume that the rank of the residues is known or has been estimated.
A singular value decomposition (SVD) of an estimate of the residue RI results in
2m
Let
where [ e i l - * * e,] are the left singular ve:tors corre- sponding to the di largest singular valufs of Ri. The min- imum norm rank d; approximation of Ri is
Letting Bi = Ai 2'; and Y i = Z'-' ai q, this equation may be rewritten as
It is shown in [21] , [22] that the minimizing Yi above corresponds to a total least squares estimate [23] of the operator that maps the columns of Ei, to Ei2.
Following [ l o ] , a total least squares estimate of Yi is obtained by considering the following minimization prob- lem:
where Yil , Yi2 are di x d i . A constraint has to be imposed on (35) to avoid a trivial solution. By imposing the fol- lowing norm constraint:
the solution is given by the following 2di X 2 4 eigende- composition:
where A i l 2 X i 2 1 - * 2 And,. The eigenvectors cor- responding to smallest eigenvalues achieve the minimum in (35):
The operator Yi that maps the columns of Ei2 onto Eil is estimated by
3, = -YilTLSY&. ( 3 9 )
The eigenvalues of the operator Yi and the pole pi at which the signal subspace is estimated are related to the angles of amval. Performing an eigendecomposition of @i yields
[ ~ i l ] [ ] [V,T vi21 ( 3 2 ) di
C A..e..v? = j = l v v v
Ei2 A id,
and [ eil * - eidj] approximately span the signal subspace. We wish to find the set of vectors, with the structure seen
Frobenius norm is chosen as a measure of closeness, the following problem is obtained:
in (21), that are,closest to the estimated subspace. If the 9. 1 1 = f:l&.f. 1 1 (40)
where hi = diag [ &, - *
obtain the following relations: +id;] . From (4 ) and (13) , we

OTTERSTEN AND KAILATH: DOA ESTIMATION FOR WIDE-BAND SIGNALS
~
323
The phase and the modulus of c$ik should agree with p y . Imposing the constraint that Y i k be a real number leads to an overdetermined equation. ' This results in two esti- mates of O i k , based on modulus:
or based on phase:
A combination of the estimates could be used to obtain an estimate of O i k ; however, simulations show that the vari- ance of the estimate based on modulus is significantly higher than the one based on phase. One factor contrib- uting to this is the variance in the modulus of the pole estimate which is considerably higher than the variance in the argument of the pole.
An estimate of the DOA is obtained at each mode of the emitter signal. If the measured signals are real, the modes occur as complex conjugate pairs and the estimates at a pair are the same. When an emitter signal has more than one pair of modes, more than one DOA estimate is obtained. An additional step required in the algorithm is thus to cluster the DOA estimates and form a weighted average of the estimates. The weighting can be based on the confidence in the location estimate at the different poles. The issues of clustering and weighting the esti- mates need further investigation.
V. SIMULATIONS The performance of the proposed algorithm is com-
pared to the MDSS algorithm [I] and the CSS method [16] in simulations. To reduce the simulation effort, a uni- form linear array with eight identical sensors is assumed. Different signal spectra are assumed as noted below. A spacing of c / f s , ( f s = sampling frequency) is used to avoid ambiguity problems. Additive white noise is pres- ent at each sensor and is uncorrelated from sensor to sen- sor. The number of sources as well as the pole multiplic- ity are assumed to be known in all cases.
The poles and residues of the system are estimated as described in the previous section using r,,, = I,,, = 0. In cases I and 11, the estimates are based on eight co- variance lags, and in case I11 on ten covariance lags be- cause of the higher order model. The signal subspace is estimated through an SVD and ESPRIT is applied using sensors 1-7 and 2-8 as subarrays. The DOA estimates are obtained using (43).
In the modal MUSIC algorithm (MDSS), the modal signal subspace is estimated in the same manner as in the
'Ideally, +,k should be estimated under the constraint that +,k = pp' and -y,k E , but such a constraint would be too costly to impose.
extended ESPRIT algorithm. The array manifold at the pole estimate is then searched for peaks.
Since uncorrelated emitters are assumed, the row space of the residues is also estimated for the extended ESPRIT and MDSS algorithms; see (20). Thus, two DOA estimates are obtained at each pair of complex conjugate poles that are then averaged.
In the CSS algorithm, the data are segmented and each segment is decomposed into J narrow-band compo- nents using an unwindowed FFT. The narrow-band com- ponents from bins J , to J2 are then focused to a center frequency. For case I and case 11, J = 32, Jl = 0, and 52 = 16, and for case 111, J = 128, J , = 16, and J2 = 48. In order to apply the linear transformations mentioned earlier, initial DOA estimates are required as well as some knowledge of the emitter spectra. The average of the true DOA's is used as an initial estimate, diagonal transfor- mations are applied and centered at the average of the two true center frequencies. The array manifold at that fre- quency is then searched for peaks.
Since a uniform linear array with identical sensors is used here, the corresponding Root-MUSIC estimates are also computed for MDSS and CSS.
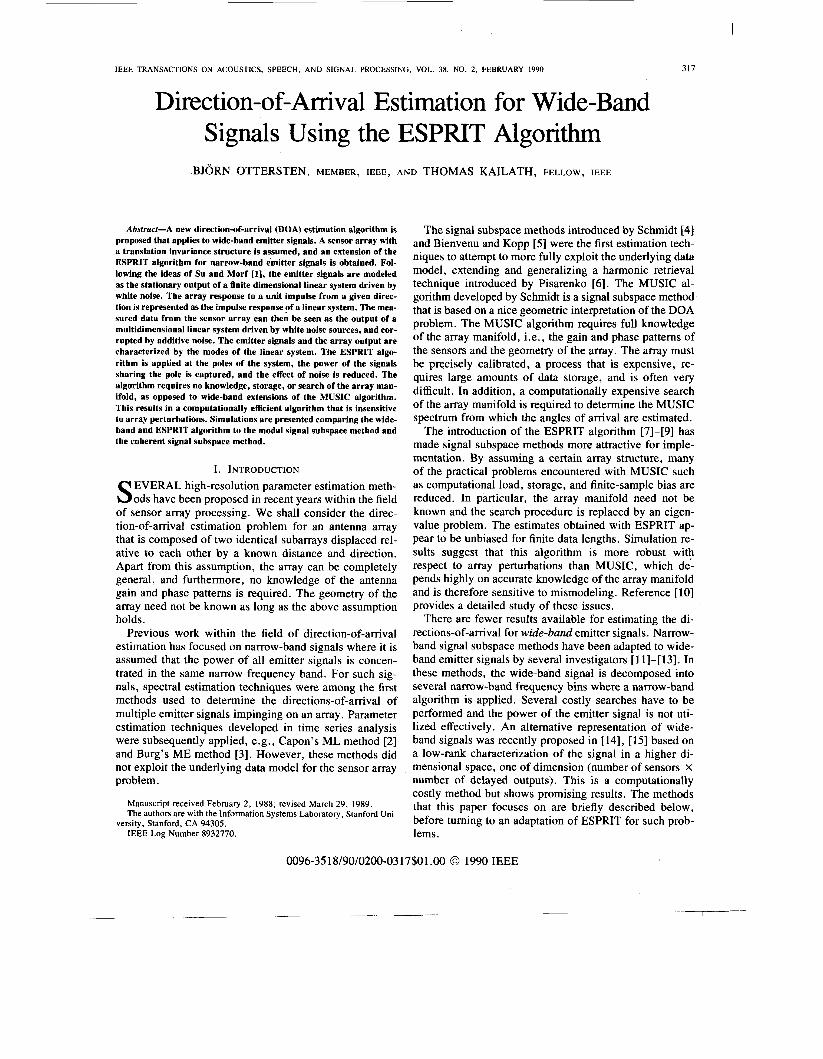
Case I) Zdentical Spectra: Two broad-band emitters are present at 18.7" and 31.3" with identical spectra. The emitter signals are generated by passing two independent Gaussian white noise sequences through a linear system 1/( 1 - p z - ' ) ( 1 - p * z - ' ) where p = -0.12 + 0.79i. The SNR at each sensor is 10 dB for both sources. The five algorithms were run 200 times on independent data, and histograms of the estimates for each method are plot- ted in Fig. 1. A failure for MDSS and CSS is recorded when two peaks are not found within 5" to 40". The sam- ple variances, biases (in degrees), and failure rates are shown in Table I. No failures are recorded for the ES- PRIT and Root-MUSIC algorithms since two estimates are always provided.
There is a bias in the wide-band ESPRIT DOA estimate of one of the sources due to bias in the pole and residue estimation procedures. If the pole and residue estimates are improved, the DOA estimates will improve as well. As indicated in Fig. 1 , the modal MUSIC algorithm fails to resolve the two sources in virtually every trial. We be- lieve that this is due to the sensitivity of the algorithm to errors in the array manifold. The array manifold depends on the pole estimate, which contains errors. The CSS method works well in cases when the sources have iden- tical spectra.
Case 11) Overlapping Spectra: In this scenario, two broad-band emitters at 18.7" and 23.6" are present with strongly overlapping spectra; see Fig. 4. These signals were generated by the linear systems, 1 /( 1 - p z - ' ) ( 1 - p*z - ' ) , with p I = -0.12 + 0.79i for one emitter and
p2 = 0.12 + 0.79i for the other. The SNR at each sensor is again 10 dB for both sources. Four poles are estimated in the pole estimation procedure and the dimension of the
324 IEEE TRANSACTIONS ON ACOUSTICS, SPEECH, AND SIGNAL PROCESSING, VOL. 38, NO. 2, FEBRUARY 1990
Hbtqnm d MDSS DOA srtlmstea . . . . . . . . .
MUSE -
5
Hhtogmn d CSS DOA eatinwiles 120
MUSIC: - 100 Rd-MUSIC: -----
80
5 aBQ
$ 40
20
. '5 10 15 20 25 30 35 40 45 50 55
W A (degrees)
Fig. 1. Histogram of 200 independent trials, ESPRIT, MDSS, and CSS, 480 snapshots, SNR 10 dB.
TABLE I SAMPLE STATISTICS FOR CASE I
Variance Bias Failures t source 1 2 1 2 Extended ESPRIT 0.461 0.749 -0.312 -1.06 MDSS Root-MUSIC 0.385 0.577 1.31 0.0151 css 0.263 0.239 -0.0931 -0.297 0% Root-MUSIC 0.260 0.232 -0.230 -0.184
* 99.5% * * *
t Fdun?. M not included in the statistics. indicates insufficient data.
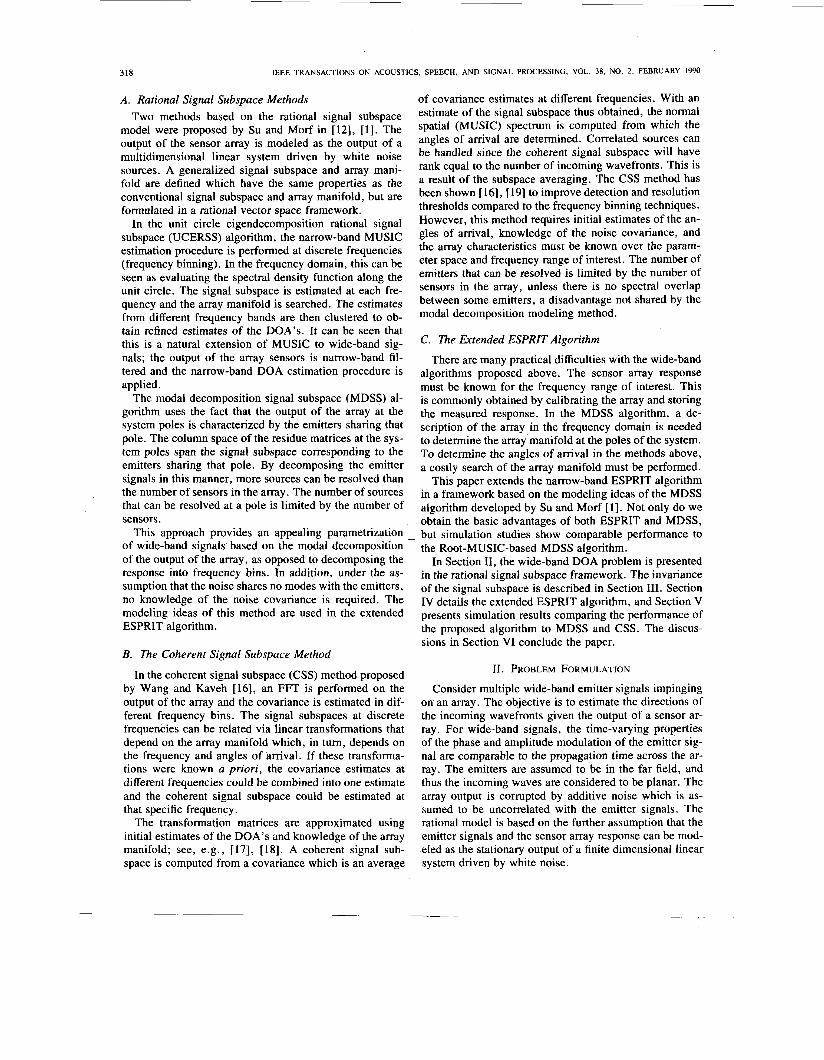
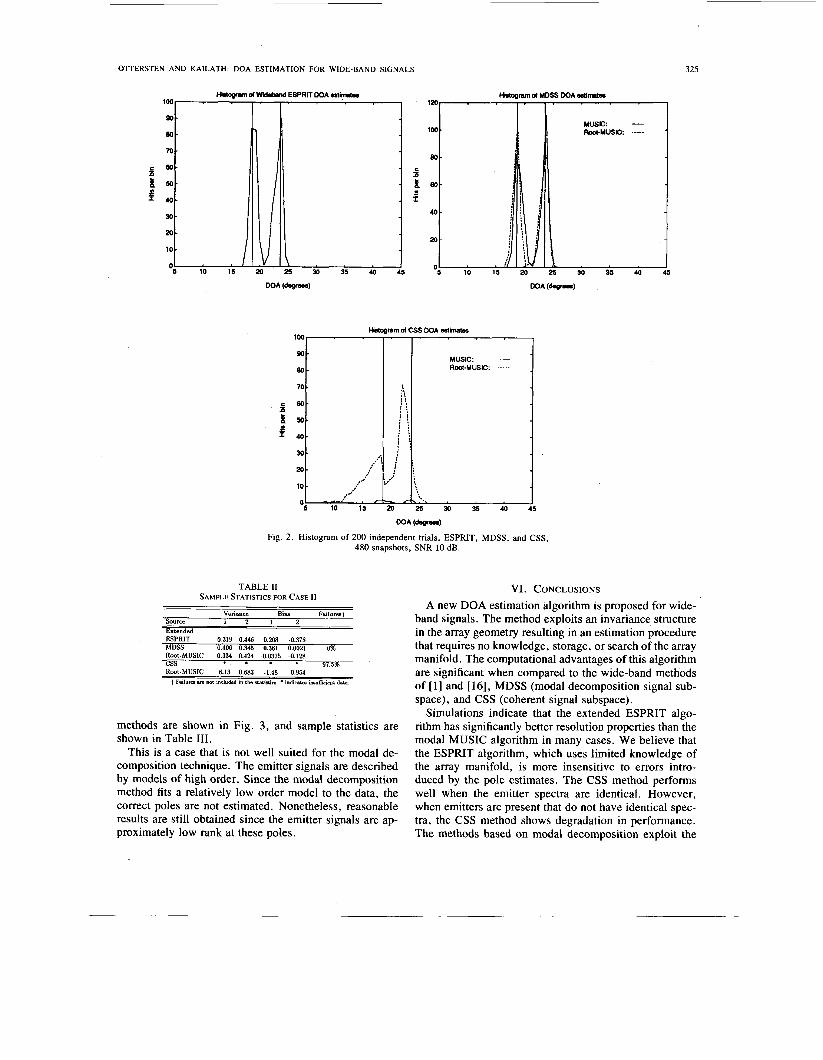
modal signal subspace is chosen as one. Histograms of the DOA estimates for 200 independent trials of the dif- ferent methods are shown in Fig. 2, and sample statistics are shown in Table 11. A failure is recorded for the MDSS method when one peak is not found within 5"-35" (one estimate is obtained for each array manifold search), and for the CSS method when two peaks are not found within 5"-35".
The wide-band, ESPRIT and MDSS methods resolve the two emitters well. The performance of the CSS method is
significantly degraded since the spectra of the two emitter signals are not identical. It is possible to improve the CSS estimates by incorporating knowledge of the source spec- tra (e.g., using only certain frequency bins) when per- forming the covariance averaging and focusing.
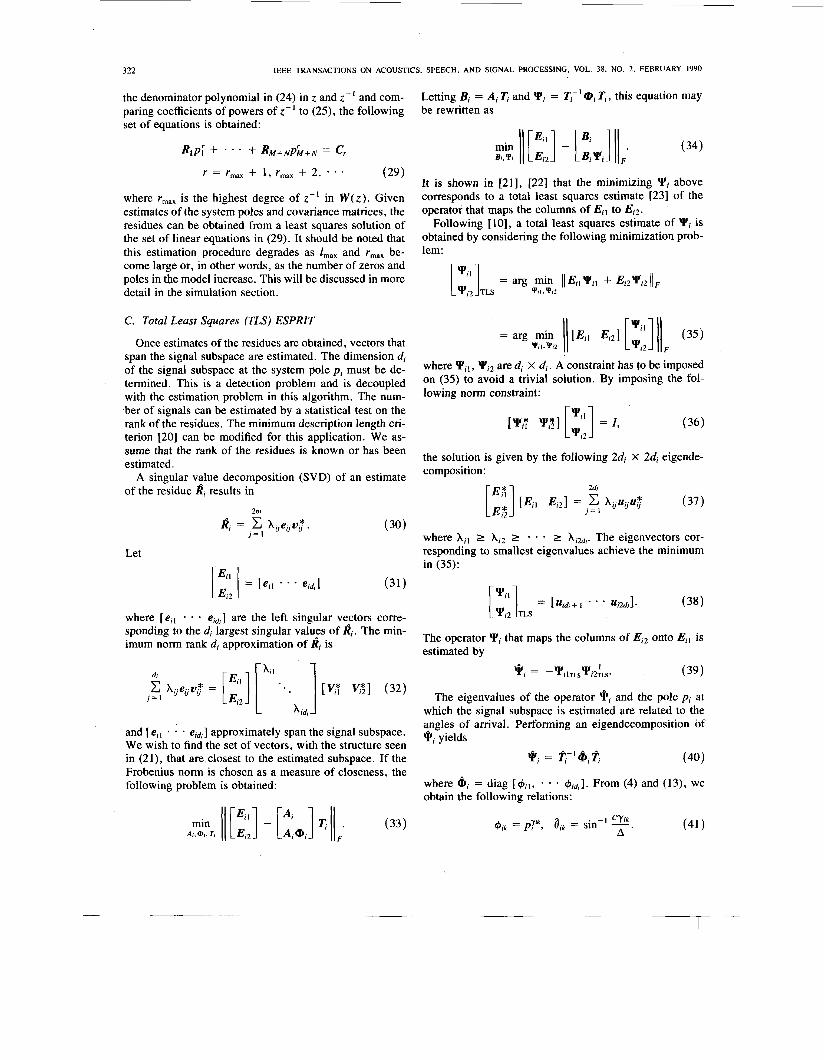
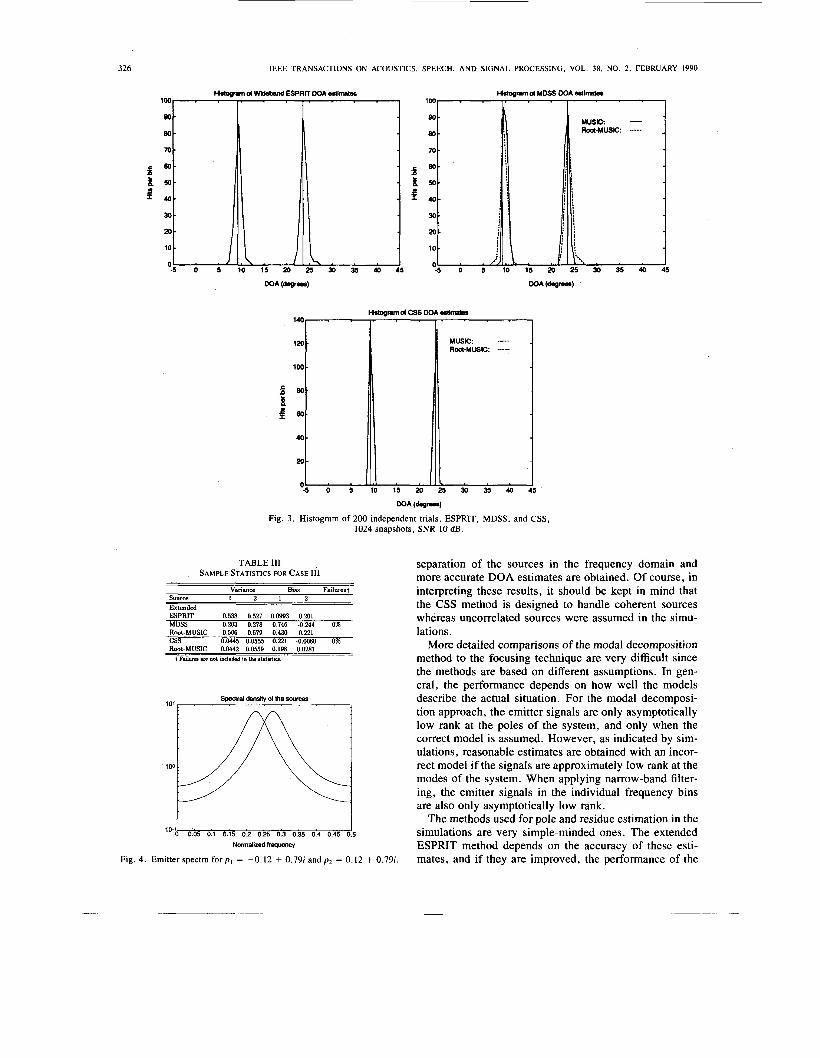
Case ZZZ) Passband Signals: In this case, the effect of choosing an incorrect model for the modal decomposition is studied. Two uncorrelated sources with directions 9.2" and 23.6" are present. The two signals possess identical flat bandpass spectral densities, and are similar to those used in [15] and [16] for simulation purposes. The sam- pling frequency f , is chosen such that the bandpass ex- tends from 0. 125fs to 0.375fs. The SNR at each sensor is again 10 dB for both sources. The modal decompositions are computed using an eight pole model. In the MDSS and extended ESPRIT algorithms, the modal signal sub- space dimension is two. The estimates obtained at the dif- ferent poles are clustered and averaged. Histograms of the DOA estimates for 200 independent trials of the different
OTTERSTEN AND KAILATH: DOA ESTIMATION FOR WIDE-BAND SIGNALS 325
100
90-
8 0 -
70-
Bo- o a 5 0 -
40-
30-
20-
10
'5
9
- I I \,
10 15 20 25 30 35 40 45
C - a e
. .. 120-
M U S E - 100 - Root-MUSIC: .----
8 0 -
8 0 -
40-
20-
'5 10 15 20 25 30 35 40 45
5
Fig. 2 . Histogram of 200 independent trials, ESPRIT, MDSS, and CSS, 480 snapshots, SNR 10 dB.
TABLE I1 SAMPLE STATISTICS FOR CASE I1
x urce VarimCe Bias Failureat
Extended ~~~~~
ESPRIT 0.319 0.446 0.208 -0.378 MDSS 0.406 0.345 0.361 0.0021 0% Root-MUSIC 0.334 0.424 -0.0375 -0.128
Root-MUSIC 6.13 0.683 -1.48 -0.954 css * * * * 97.5%
t Failurn M not included in the stslislics. * indicates insufficient data.
methods are shown in Fig. 3, and sample statistics are shown in Table 111.
This is a case that is not well suited for the modal de- composition technique. The emitter signals are described by models of high order. Since the modal decomposition method fits a relatively low order model to the data, the correct poles are not estimated. Nonetheless, reasonable results are still obtained since the emitter signals are ap- proximately low rank at these poles.
VI. CONCLUSIONS A new DOA estimation algorithm is proposed for wide-
band signals. The method exploits an invariance structure in the array geometry resulting in an estimation procedure that requires no knowledge, storage, or search of the array manifold. The computational advantages of this algorithm are significant when compared to the wide-band methods of [ 11 and [ 161, MDSS (modal decomposition signal sub- space), and CSS (coherent signal subspace).
Simulations indicate that the extended ESPRIT algo- rithm has significantly better resolution properties than the modal MUSIC algorithm in many cases. We believe that the ESPRIT algorithm, which uses limited knowledge of the array manifold, is more insensitive to errors intro- duced by the pole estimates. The CSS method performs well when the emitter spectra are identical. However, when emitters are present that do not have identical spec- tra, the CSS method shows degradation in performance. The methods based on modal decomposition exploit the
326
100
90-
8 0 -
m - Bo-
5 0 -
40-
30-
20-
10
9 5
IEEE TRANSACTIONS ON ACOUSTICS,
- L I \
0 5 ' i o ' 1; A' i5- 30 35 40 45
SPEECH, AND SIGNAL PROCESSING, VOL. 38, NO. 2, FEBRUARY 1990
HMopnm d MDSS WA O8Ilnnteo 100
MUSIC. - &&MUSE: .----
80
70
Bo
50
40
30
20
10
'-5 0 5 10 15 20 25 30 35 40 45
15 20
(dw=)
Fig. 3. Histogram of 200 independent trials, ESPRIT, MDSS, and CSS, 1024 snapshots, SNR 10 dB.
TABLE 111 SAMPLE STATISTICS FOR CASE 111
VariaOCe Bias Failurest Source 1 2 1 2 EXtA="derl -. ._ ESPRIT 0.538 0.527 0.0993 0.201 MDSS 0.203 0.278 0.746 -0.244 0% Root-MUSIC 0.506 0.579 0.430 0221 css 0.0445 0.0555 0.221 -0.0080 0% Root-MUSIC 0.0442 0.0559 0.1% 0.0281
t Failurar M not includd in th statistics.
Normalized frequency
Fig. 4. Emitter spectra forp, = -0.12 + 0.79i and p z = 0.12 + 0.79i.
separation of the sources in the frequency domain and more accurate DOA estimates are obtained. Of course, in interpreting these results, it should be kept in mind that the CSS method is designed to handle coherent sources whereas uncorrelated sources were assumed in the simu- lations.
More detailed comparisons of the modal decomposition method to the focusing technique are very difficult since the methods are based on different assumptions. In gen- eral, the performance depends on how well the models describe the actual situation. For the modal decomposi- tion approach, the emitter signals are only asymptotically low rank at the poles of the system, and only when the correct model is assumed. However, as indicated by sim- ulations, reasonable estimates are obtained with an incor- rect model if the signals are approximately low rank at the modes of the system. When applying narrow-band filter- ing, the emitter signals in the individual frequency bins are also only asymptotically low rank.
The methods used for pole and residue estimation in the simulations are very simple-minded ones. The extended ESPRIT method depends on the accuracy of these esti- mates, and if they are improved, the performance of the

OTTERSTEN AND KAILATH: DOA ESTIMATION FOR WIDE-BAND SIGNALS 327
algorithm will also improve. When the sources are located far from broadside, the propagation time across the array is large and the resulting model of the array output pos- sesses many zeros. The procedures used for pole and res- idue estimation are sensitive to the number of zeros in the model, a fact which is apparent from (27) and (29). The development of good procedures for pole and residue es- timation that make use of the specific model of this paper is an area that needs further study.
REFERENCES G. Su and M. Morf, “Modal decomposition signal subspace algo- rithms,” IEEE Trans. Acoust., Speech, Signal Processing, vol. ASSP- 34, pp. 585-602, June 1986. J. Capon, “High resolution frequency wave number spectrum anal- ysis,’’ Proc. IEEE, vol. 57, pp. 1408-1418, 1969. J. P. Burg, “Maximum entropy spectral analysis,” in Proc. 37th Annu. Int. SEG Meet., Oklahoma City, OK, 1967. R. 0. Schmidt, “A signal subspace approach to multiple emitter lo- cation and spectral estimation,” Ph.D. dissertation, Stanford Univ., Stanford, CA, Nov. 1981. G. Bienvenu and L. Kopp, “Adaptivity to background noise spatial coherence for high resolution passive methods,” in Proc. IEEE ICASSP, Denver, CO, 1980, pp. 307-310. V. F. Pisarenko, “The retrieval of harmonics from a covariance func- tion,” Geophys. J. Roy. Astron. Soc., vol. 33, pp. 347-366, 1973. A. Paulraj, R. Roy, and T. Kailath, “Estimation of signal parameters via rotational invariance techniques-ESPRIT,” in Proc. 19th Asi- lomar Conf. Circuits, Syst., Cornput., Asilomar, CA, Nov. 1985. R. Roy, A. Paulraj, and T. Kailath, “Estimation of signal parameters via rotational invariance techniques-ESPRIT, ” in Proc. IEEE ICASSP, vol. 4 , Tokyo, Japan, 1986, pp. 2495-2498. - , “ESPRIT-A subspace rotation approach to estimation of pa- rameters of cisoids in noise,” IEEE Trans. Acoust., Speech, Signal Processing, vol. ASSP-34, pp. 1340-1342, Oct. 1986. R. H. Roy, “ESPRIT, Estimation of signal parameters via rotational invariance techniques,” Ph.D. dissertation, Stanford Univ., Stan- ford, CA, Aug. 1987. M. Coker and E. Ferrara, “A new method for multiple source loca- tion,” in Proc. IEEE ICASSP, Paris, France, Apr. 1982. G. Su and M. Morf, “The signal subspace approach for multiple wide- band emitter location,” IEEE Trans. Acoust., Speech, Signal Pro- cessing, vol. ASSP-31, pp. 1502-1522, Dec. 1983. M. Wax, T . J. Shan, and T. Kailath, “Spatio-temporal spectral anal- ysis by eigenstructure methods,” IEEE Trans. Acoust., Speech, Sig- nal Processinn. vol. ASSP-32. Aug. 1984.
I141 K. Buckley a i d L. Griffiths, “Direct broad-band array data process- ing for source location estimation,” in Proc. IEEE ASSP 3rd Work- shop Spectrum Estimation Modeling, Nov. 1986, pp. 145-148.
[ 151 -, “Broad-band signal-subspace spatial-spectrum (BASS-ALE) es- timation,” IEEE Trans. Acoust., Speech, Signal Processing, vol. 36,
[I61 H. Wang and M. Kaveh, “Coherent signal-subspace processing for the detection and estimation of angles of arrival of multiple wide-band sources,” IEEE Trans. Acoust., Speech, Signal Processing, vol.
[I71 A. K. Shaw and R. Kumaresan, “Estimation of angles of arrivals of broad-band signals,” in Proc. ICASSP ’87 Conf., Dallas, TX, Apr.
[ l8] H. Hung and M. Kaveh, “Focusing matrices for coherent signal-sub- space processing,” IEEE Trans. Acoust., Speech, Signal Processing, vol. 36, pp. 1272-1281, Aug. 1988.
pp. 953-964, July 1988.
ASSP-33, pp. 823-831, Oct. 1985.
1987, pp. 2296-2299.
1191 H. Wang and M. Kaveh, “On the performance of signal-subspace processing-Part 11: Coherent wide-band systems,” IEEE Trans. Acoust., Speech, Signal Processing, vol. ASSP-35, pp. 1583-1591, Nov. 1987.
[20] M. Wax and T. Kailath, “Detection of signals by information theo- retic criteria,” IEEE Trans. Acoust., Speech, Signal Processing, vol. ASSP-33, pp. 387-392, Apr. 1985.
[21] B. Ottersten and M. Viberg, “A unified framework for sensor array processing based on subspace fitting,” Linkoping Univ., Linkoping, Sweden, Tech. Rep. TR-LiTH-ISY-1-0943, Sept. 1988.
[22] R. Roy, B. Ottersten, L. Swindlehurst, and T. Kailath, “Multiple invariance ESPRIT,” in Proc. 22nd Asilomar Con$ Signals, Syst., Cornput., Asilomar, CA, Nov. 1988.
[23] G. H. Golub and C. F. Van Loan, Matrix Computations. Baltimore, MD: The Johns Hopkins University Press, 1984.
[24] B. Ottersten and T. Kailath, “Wide-band direction-of-arrival esti- mation using the ESPRIT algorithm,” in Proc. ICASSP ’88 Conf., New York, NY, Apr. 1988.
Bjorn Ottersten (S’87-M’89) was born in Stock- holm, Sweden, on July 3 1, 1961. He received the M.S. degree in electrical engineering and applied physics from Linkoping University, Linkoping, Sweden, in 1986. In 1989 he received the Ph.D. degree in electrical engineering from Stanford University, Stanford, CA, where he is currently a Postdoctoral Fellow associated with the Informa- tion Systems Laboratory.
From 1984 to 1985, he was employed with Linkoping University as a Research and Teaching
Assistant in the Control Theory Group. In 1985 he was awarded the Lin- koping University Scholarship for Academic Studies at Stanford Univer- sity. In 1988 he was a Visiting Researcher at the Department of Electrical Engineenng, Linkoping University. His research interests include stochas- tic signal processing, sensor array processing, system identification, and time series analysis.
Thomas Kailath (S’57-M’62-F’70) was edu- cated in Poona, India, and at the Massachusetts Institute of Technology, Cambridge, where he re- ceived the S.M. degree in 1959 and the Sc.D. de- gree in 1961.
After a year at the Jet Propulsion Laboratories, Pasadena, CA, he joined Stanford University as an Associate Professor of Electrical Engineering in 1963. He was promoted to Full Professor in 1968, served as Director of the Information Sys- tems Laboratory from 1971 through 1980, as As-
sociate Department Chairman from 1981 to 1987, and currently holds the Hitachi America Professorship in Engineering. He has worked in a number of areas including information and communication theory, signal process- ing, linear systems, linear algebra, operator theory, and control theory; his recent research interests include array processing, fast algorithms for non- stationary signal processing, and the design of special purpose computing arrays. He is the author of Linear Systems (Englewood Cliffs, NJ: Prentice- Hall, 1980) and Lectures on Wiener and Kalman Filtering (New York: Springer-Verlag, 1981).
Dr. Kailath has held Guggenheim and Churchill fellowships, among others, and received awards from the IEEE Information Theory Group, the IEEE Acoustics, Speech, and Signal Processing Society, and the American Control Council. He is a Fellow of the Institute of Mathematical Statistics and is a member of the National Academy of Engineering.
Related Documents








![Magnitude-Based Angle-of-Arrival Estimation, …belalkorany/Papers/IPSN18_KaranamKoran… · forming [28], MUSIC [24], and ESPRIT [23]. All of these techniques assume that the received](https://static.cupdf.com/doc/110x72/5b58c0997f8b9a657c8c5ae3/magnitude-based-angle-of-arrival-estimation-belalkoranypapersipsn18karanamkoran.jpg)

