Konzentrationsausgleich in Rfihrgeff~il3en bei iaminarer Str6mung der Konvektions-Zahl Re12" Sc und zusfitzlich der Reynolds- Zahl Re12 herausgestellt. Die Mischzeit n~ihert sich mit Re~. S¢--, ~ einem Endwert, dernur noch eine Funktion der Reynolds-Zahl ist. Danksagung Herrn Dipi.-Ing. A. Klippe sei f/Jr seine Mitwirkungbei der Bearbeitungdieses Projektes, insbesondere f/ir die Betreuung der Diplom-Arbeiten der Herren Sasse, Hoffmann,Zand-lrani, Mayer und Fournel sehr herzlich gedankt. Literatur [1] [9l [10] [ll] [12] Brauer, H.: Development and performance of a stagna- tion jet mixer. Ger. Chem. Eng. 4 ( 1981) 144-154. [2] Henzler, H.J.: Eignung von kontinuierlich durchstr6m- ten Mischern zum Homogenisieren. Chem.-Ing.-Techn. [13] 51 (1979)1, 1-8. [3] Zlokarnik, M.: Rfihrtechnik. In: Ullmanns Enzyklop~i- die der technischen Chemie, 4. Aufl., Band 2, 259-281. [14] [4] Brauer, H.: Power consumption in aerated stirred tank reactor systems. In: Advances in Biochemical Enginee- ring, Ghose, T.K.; Fiechter, A. and Blakebrough, N. (Eds.), Volume 13, 87-119. [ 15] [5] Brauer, H. und Thiele, H.: Hubstrahlmischer. CAV (1975) 4, 32-33. [16] [6] Hiby, J.W.: Homogenisieren. Verf. Berichte, Bd. 22 (1984) 174-190. [7] Hackl, A. und Jaschek, G.: R/ihren mehrkomponentiger [17] Systeme: Die Mischzeit als Funktion der Lage des Ein- laufpunktes. Verfahrenstechnik 4 (1970) 6, 242-244. [8] Wurian, H. und Hackl, A.: Mischzeitbestimmung bei Rfihrvorgfingen. VDI-Berichte Nr. 315 (1978) 289-294. Mayinger, F. und Liibbe, D.: Ein tomographisches Mel3- verfahren und seine Anwendung auf Mischvorgfinge und Stoffaustausch. W/irme- und Stofffibertragung 18 (1984) 49- 59. Ostendorf, W.: Einsatz der optischen Tomographie zum Messen von Temperaturfeldern in Rfihrgeff~il3en. Disser- tation, Technische Universitfit Hannover 1987. Vollmerhaus, D.: Mikro- und Makrovermiscliung in einem nicht-idealen Riihrkessel. Dissertation, Universi- t~it Dortmund 1978. Murakomi, Y.; Takao, M.; Nomoto, O. and Nakugama, K.: Mixing effect on homogeneous reaction in batch stirred tank reactor. J. Chem. Eng. Japan 14 (1981) 3, 196-200. Brauer, H. und Thiele, H.: Leistungsbedarf und W~irme- fibertragung beim Rfihren irn laminaren Str6mungsbe- reich. Verfahrenstechnik 5 ( 1971) 10-11, 1- 11. Thiele, H.: Str6mung und Leistungsbedarf beim Rfihren Newtonscher Flfissigkeiten mit Anker-, Blatt- und Tur- binenrfihrern im laminaren Bereich. Dissertation, Tech- nische Universit~it Berl(n 1972. Brauer, H.: W/irmetransport in R/ihrgeffiBen. W~irme- und Stofffibertragung 13 (1980) 105-113. Lawrenz, K. und Brauer, H.: Freie Konvektion am senkrecht stehenden schlanken Zylinder. VDI-For- schungsheft 663, 1991. • Brauer, H.: Stirred vessel reactors. In: Biotechnology, Rehm, H.-J. und Reed, G. (Eds.), Vol. 2, 395-444, Weinheim: Verlagsgesellschaft mbH 1985. Eingegangen am 28. Juni 1993 F 4137 Die quasi-elastische Berechnung viskoelastischer Rollk6rper Dietrich Severin, Winfried Hammele und Linan Qiao*) Der Beitrag befaflt sich mit dem mechanischen Verhalten yon rollenden K6rpern aus Viskoelasti- schem Material unter Normalkraftbelastung. Zur Beschreibung des viskoelastischen Materialver- haltens bei harmonischer Beanspruchung wird ein sog. Viskoelastizitdtsmodul geschaffen, der yon den Kennwerten des zugrundegelegten Werkstoff-Modells und yon der Beanspruchungsfrequenz abhiingt. Die darauf beruhende Berechnungsmethode wird als quasi-elastisch angesehen. Unter Verwendung der fiir den elastischen Rollkontakt existierenden L6sungen werden die Spannungen On Kontaktgebiet und On Rollk6rper, die Verformung des Rollk6rpers und der Leerlaufschlupf in Abhdngigkeit der Winkelgeschwindigkeit analytisch berechnet und graphisch dargestellt. 1. Einleitung In vielen Bereichen der Technik werden Rollk6rper, wie R/ider und Walzen, eingesetzt, die aus thermoplastischen oder elastomeren Kunststoffen bestehen. Derartige R~ider werden beispielsweise als Trag-, Fiihrungs-oder Antriebsele- mente in F6rder- und Verkehrssystemen eingesetzt. In Druckmaschinen und in Anlagen zur Folienherstellung, in *) Prof. Dr.-Ing. D. Severin, Dipl.-Ing. W. Hammele, Dipi.-Ing. L. Qiao, Institut fiir F6rdertechnik und Getriebetechnik, TU Berlin. Textilmaschinen sowie in der Foto-, Kopier- und Computer- technik stellen Kunststoffwalzen, die aufeinander abrollen, ein wesentliches Konstruktionselement dar. Rollk6rper aus Kunststoff zeichnen sich gegeniiber metalli- schen Rollk6rpern durch einen ger~iuscharmen Lauf, eine gute Schwingungsd~impfung, ein kleines Eigengewicht, durch Kor- rosionsbestfindigkeit und durch die M6glichkeit der wirtschaft- lichen Fertigung aus. Bei der Verwendung als Antriebselement ist die relativ grol3e Reibungszahl/~ von Vorteil. Um Rollsysteme.mit Kunststoffrollen kurzfristig funktions- und beanspruchungsgerecht auslegen zu k6nnen, ben6tigt die 110 Forschung im Ingenieurwesen--Engineering Research Bd. 60 (1994) Nr. 5

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Konzentrationsausgleich in Rfihrgeff~il3en bei iaminarer Str6mung
der Konvektions-Zahl Re12" Sc und zusfitzlich der Reynolds- Zahl Re12 herausgestellt. Die Mischzeit n~ihert sich mit Re~. S¢--, ~ einem Endwert, de rnu r noch eine Funktion der Reynolds-Zahl ist.
Danksagung
Herrn Dipi.-Ing. A. Klippe sei f/Jr seine Mitwirkung bei der Bearbeitung dieses Projektes, insbesondere f/ir die Betreuung der Diplom-Arbeiten der Herren Sasse, Hoffmann, Zand-lrani, Mayer und Fournel sehr herzlich gedankt.
Literatur
[1]
[9l
[10]
[ll]
[12]
Brauer, H.: Development and performance of a stagna- tion jet mixer. Ger. Chem. Eng. 4 ( 1981) 144-154.
[2] Henzler, H.J.: Eignung von kontinuierlich durchstr6m- ten Mischern zum Homogenisieren. Chem.-Ing.-Techn. [13] 51 (1979)1, 1-8.
[3] Zlokarnik, M.: Rfihrtechnik. In: Ullmanns Enzyklop~i- die der technischen Chemie, 4. Aufl., Band 2, 259-281. [14]
[4] Brauer, H.: Power consumption in aerated stirred tank reactor systems. In: Advances in Biochemical Enginee- ring, Ghose, T.K.; Fiechter, A. and Blakebrough, N. (Eds.), Volume 13, 87-119. [ 15]
[5] Brauer, H. und Thiele, H.: Hubstrahlmischer. CAV (1975) 4, 32-33. [16]
[6] Hiby, J.W.: Homogenisieren. Verf. Berichte, Bd. 22 (1984) 174-190.
[7] Hackl, A. und Jaschek, G.: R/ihren mehrkomponentiger [17] Systeme: Die Mischzeit als Funktion der Lage des Ein- laufpunktes. Verfahrenstechnik 4 (1970) 6, 242-244.
[8] Wurian, H. und Hackl, A.: Mischzeitbestimmung bei Rfihrvorgfingen. VDI-Berichte Nr. 315 (1978) 289-294.
Mayinger, F. und Liibbe, D.: Ein tomographisches Mel3- verfahren und seine Anwendung auf Mischvorgfinge und Stoffaustausch. W/irme- und Stofffibertragung 18 (1984) 49- 59. Ostendorf, W.: Einsatz der optischen Tomographie zum Messen von Temperaturfeldern in Rfihrgeff~il3en. Disser- tation, Technische Universitfit Hannover 1987. Vollmerhaus, D.: Mikro- und Makrovermiscliung in einem nicht-idealen Riihrkessel. Dissertation, Universi- t~it Dortmund 1978. Murakomi, Y.; Takao, M.; Nomoto, O. and Nakugama, K.: Mixing effect on homogeneous reaction in batch stirred tank reactor. J. Chem. Eng. Japan 14 (1981) 3, 196-200. Brauer, H. und Thiele, H.: Leistungsbedarf und W~irme- fibertragung beim Rfihren irn laminaren Str6mungsbe- reich. Verfahrenstechnik 5 ( 1971) 10-11, 1 - 11. Thiele, H.: Str6mung und Leistungsbedarf beim Rfihren Newtonscher Flfissigkeiten mit Anker-, Blatt- und Tur- binenrfihrern im laminaren Bereich. Dissertation, Tech- nische Universit~it Berl(n 1972. Brauer, H.: W/irmetransport in R/ihrgeffiBen. W~irme- und Stofffibertragung 13 (1980) 105-113. Lawrenz, K. und Brauer, H.: Freie Konvektion am senkrecht stehenden schlanken Zylinder. VDI-For- schungsheft 663, 1991. • Brauer, H.: Stirred vessel reactors. In: Biotechnology, Rehm, H.-J. und Reed, G. (Eds.), Vol. 2, 395-444, Weinheim: Verlagsgesellschaft mbH 1985.
Eingegangen am 28. Juni 1993 F 4137
Die quasi-elastische Berechnung viskoelastischer Rollk6rper Dietrich Severin, Winfried Hammele und Linan Qiao*)
Der Beitrag befaflt sich mit dem mechanischen Verhalten yon rollenden K6rpern aus Viskoelasti- schem Material unter Normalkraftbelastung. Zur Beschreibung des viskoelastischen Materialver- haltens bei harmonischer Beanspruchung wird ein sog. Viskoelastizitdtsmodul geschaffen, der yon den Kennwerten des zugrundegelegten Werkstoff-Modells und yon der Beanspruchungsfrequenz abhiingt. Die darauf beruhende Berechnungsmethode wird als quasi-elastisch angesehen. Unter Verwendung der fiir den elastischen Rollkontakt existierenden L6sungen werden die Spannungen On Kontaktgebiet und On Rollk6rper, die Verformung des Rollk6rpers und der Leerlaufschlupf in Abhdngigkeit der Winkelgeschwindigkeit analytisch berechnet und graphisch dargestellt.
1. Einleitung
In vielen Bereichen der Technik werden Rollk6rper, wie R/ider und Walzen, eingesetzt, die aus thermoplastischen oder elastomeren Kunststoffen bestehen. Derartige R~ider werden beispielsweise als Trag-, Fiihrungs-oder Antriebsele- mente in F6rder- und Verkehrssystemen eingesetzt. In Druckmaschinen und in Anlagen zur Folienherstellung, in
*) Prof. Dr.-Ing. D. Severin, Dipl.-Ing. W. Hammele, Dipi.-Ing. L. Qiao, Institut fiir F6rdertechnik und Getriebetechnik, TU Berlin.
Textilmaschinen sowie in der Foto-, Kopier- und Computer- technik stellen Kunststoffwalzen, die aufeinander abrollen, ein wesentliches Konstruktionselement dar.
Rollk6rper aus Kunststoff zeichnen sich gegeniiber metalli- schen Rollk6rpern durch einen ger~iuscharmen Lauf, eine gute Schwingungsd~impfung, ein kleines Eigengewicht, durch Kor- rosionsbestfindigkeit und durch die M6glichkeit der wirtschaft- lichen Fertigung aus. Bei der Verwendung als Antriebselement ist die relativ grol3e Reibungszahl/~ von Vorteil.
Um Rollsysteme.mit Kunststoffrollen kurzfristig funktions- und beanspruchungsgerecht auslegen zu k6nnen, ben6tigt die
110 Forschung im Ingenieurwesen--Engineering Research Bd. 60 (1994) Nr. 5
Praxis eine einfach zu handhabende Berechnungsmethode, die das viskoelastische Werkstoffverhalten beim Rollvorgang berficksichtigt. Ein viskoelastischer Werkstoff ist neben den elastischen Materialkennwerten Elastizitfitsmodul E und Querkontraktionsza.hl v noch durch den sog. Dfimpfungsfak- tor d gekennzeichnet. Diese Materialkennwerte sind zudem vonder Temperatur, der Beanspruchungsh6he und der Bean- spruchungsfrequenz abh~ingig. Das komplexe Eigenschafts- bild der Kunststoffe erschwert die theoretische Behandlung des Rollkontaktes erheblich.
F/jr den Fall zweier zylindrischer Rollk6rper aus unglei- chen elastischen Werkstoffen existieren verschiedene analyti- sche L6sungen. Die Normalspannungsverteilung in der Kontaktfl~iche kann nach der Theorie von Hertz[l] und die Schubspannungsverteilung nach der von Johnson [2] abgelei- teten Beziehung berechnet werden. Die Spannungen im Inne- ren des Rollk6rpers haben Huber und Fuchs [3] sowie Frppl [4] untersucht. Die Verformung des Rollk6rpers und der sog. Leerlaufschlupf k6nnen nach Johnson [2] ermittelt werden. Wesentliche Voraussetzungen f/jr die G/jltigkeit dieser analy- tischen Beziehungen sind, dab der Rollk6rper als sog. elasti- scher Halbraum betrachtet werden kann und der Einflul3 von Massenkr/iften vernachl/issigbar ist. Letzteres ist im Bereich /jblicher Rollgeschwindigkeiten zul~issig.
Den Rollkontakt yon zylindrischen Kunstoffwalzen haben Knothe und Wang [5] auf der Basis der Halbraumtheorie mit Hilfe einer Boundary-Elemente-Methode untersucht. Unter Vorgabe einer konstanten Reibungszahl f/Jr das Kontaktge- biet ist die Berechnung des Rollzustandes bei beliebiger Tan- gentialkraft/jbertragung m6glich. Das numerische Verfahren liegt in Form des Programms VISCON vor.
Oden und Lin [6] haben das Abrollen eines viskoelasti- schen Zylinders auf einem starren Untergrund mit Hilfe der Finite-Elemente-Methode behandelt. Die Reibung im Kon- taktgebiet wird dabei ber/jcksichtigt.
Das Ziel dieser Arbeit ist es, das mechanische Verhalten des viskoelastischen Rollk6rpers in Abh/ingigkeit der Beanspru- chungsfrequenz, sprich Rollgeschwindigkeit, bei konstanter Temperatur analytisch zu berechnen und damit den relativ grol3en Rechenaufwand der numerischen Verfahren zu ver- meiden. Dazu geh6ren die Spannungen in der Kontaktfl/iche und innerhalb des Rollkfrpers, die Verformung des Rollk6r- pers unter der Normalkraftbelastung und der zwischen Rolle und Gegenrolle bzw. Fahrbahn auftretende Leerlaufschlupf.
Die analytische Berechnung geschieht /jber den sog. Vis- k0elastizit~itsmodul. Dieser Viskoelastizit~itsmodul ist analog zu dem bekannten Elastizit~itsmodul eine GrrBe, die neben dem elastischen auch das viskoelastische Verhalten des Mate- rials ber~cksichtigt und daher vom Werkstoffmodell und von der Beanspruchungsfrequenz abh/ingt. Auf diese Weise wird der harmonische, viskoelastische Beanspruchungszustand auf einen scheinbar elastischen Beanspruchungszustand zurfick- gef/jhrt. Die Berechnungsmethode wird daher als quasi- elastische Methode bezeichnet.
2. Quasi-elastische Methode
2.1 Werks to f fmode l l f/jr v i skoe las t i sches Mate r i a l
In der klassischen Elastizit~itstheorie wird angenommen, dab zwischen dem Dehnungszustand und dem Spannungszu-
stand ein linearer und zeitunabh~ingiger Zusammenhang be- steht. Es ist jedoch bekannt, dab zahlreiche Werkstoffe diese Voraussetzungen nicht erf~llen. Dies gilt besonders ffir vis- koelastische Werkstoffe, bei denen die Belastungszeit und -frequenz einen Einflul3 auf die Materialkennwerte haben. Bei einem linearviskoelastischen Werkstoff unterliegen die elastischen Eigenschaften dem Hookeschen Gesetz und die D~impfungseigenschaften dem Newtonschen Gesetz [7]
a=E 'E , (1)
a = r / - ~ , (2)
wobei tr die Spannung, E die Dehnung, E der Elastizit/itsmo- dul und r/die dynamische Viskosit~it bedeuten.
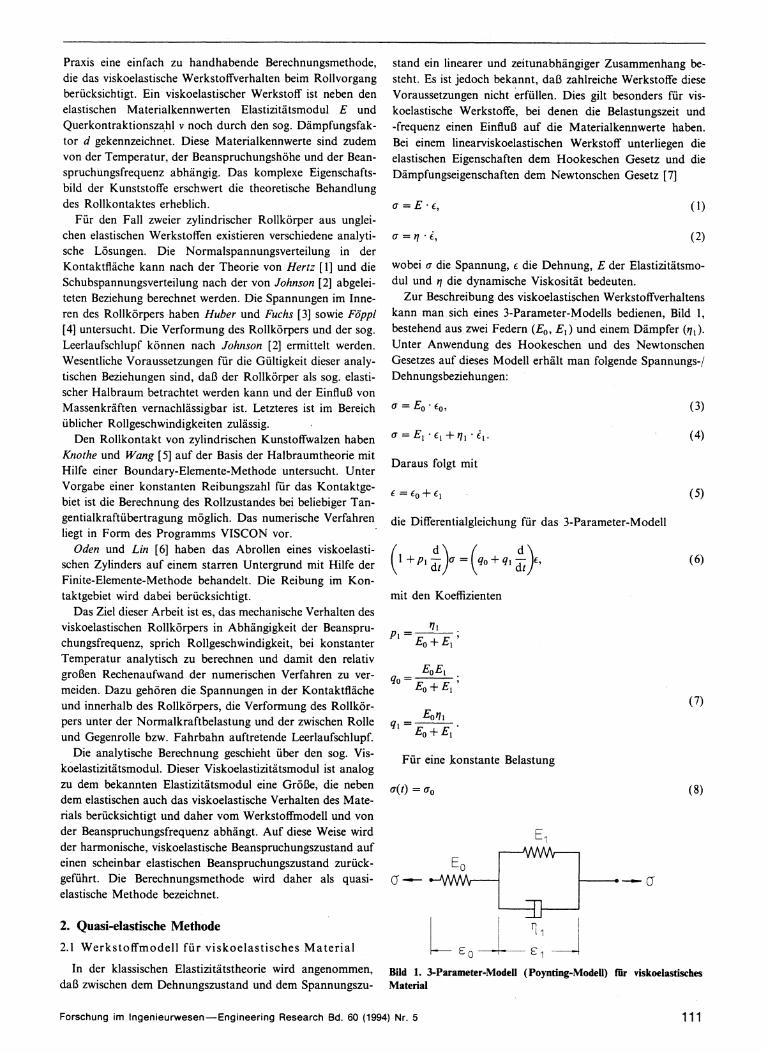
Zur Beschreibung des viskoelastischen Werkstoffverhaltens kann ma n sich eines 3-Parameter-Modells bedienen, Bild 1, bestehend aus zwei Federn (Eo, E~) und einem Dfimpfer (r/l). Unter Anwendung des Hookeschen und des Newtonschen Gesetzes auf dieses Modell erh/ilt man folgende Spannungs-/ Dehnungsbeziehungen:
tr = E0" E0, (3)
tr = E 1 • E l + ~1 " El" (4)
Daraus folgt mit
E =Eo + E1 (5)
die Differentialgleichung f/Jr das 3-Parameter-Modell
l + p , ~ a = q o + q , ~ E, (6)
mit den Koeffizienten
?ll
Pl Eo + EI
qo --- EoEI
Eo + E~
Eor/1
Eo + E~
Ffir eine konstante Belastung
(7)
a(t) = or0 (8)
E 1
o . . - - ,,.-..'Wv~ - - - - - - o
' - r l ] _lJ
rl 1 ~
Bild 1. 3-Parameter-Modell (Poynting-Modell) fur viskoelastisches Material
Forschung im Ingenieurwesen--Engineering Research Bd. 60 (1994) Nr. 5 111
Die quasi-elastische Berechnung viskoelastischer Rollk6rper
folgt aus GI. (6) die zeitabh~ingige Dehnung
E(t) = %" ~k(t), (9)
wobei @(t) als Kriechfunktion bezeichnet wird
1 1 ~'! t). ~s(t) = ~o + ~-I (1 -- e "' (10)
Ffir die beiden Grenzffille t = 0 und t ~ oo ergeben sich aus GI. (9) und (10) die folgenden Werte:
1 E(O) = "7 °'o, (l l)
r~ o
mit der Dehnungsamplitude EJ gew~ihlt werden. Mit den Gin. (13) und (14) ergibt sich aus G1. (6)"
e ~' = E(ito)a J. (15)
Darin ist E(ito) die frequenzabhS.ngige Komplexnachgiebig- keit
o o
E(ito) = ito 5 e -i°'r 81[1 o ~ dz. (16)
Die L6sung dieser Gleichung lfil3t rich zerlegen in einen Realteil E~, der als Speichernachgiebigkeit bezeichnet wird, und in einen Imagin~irteil E2, der Verlustnachgiebigkeit ge- nannt wird:
E o + E t 1 E(m) = EoE'-'---"~ ao = ~ O'o. (12)
/~(ito) = R 1 (to) + i/~(to).
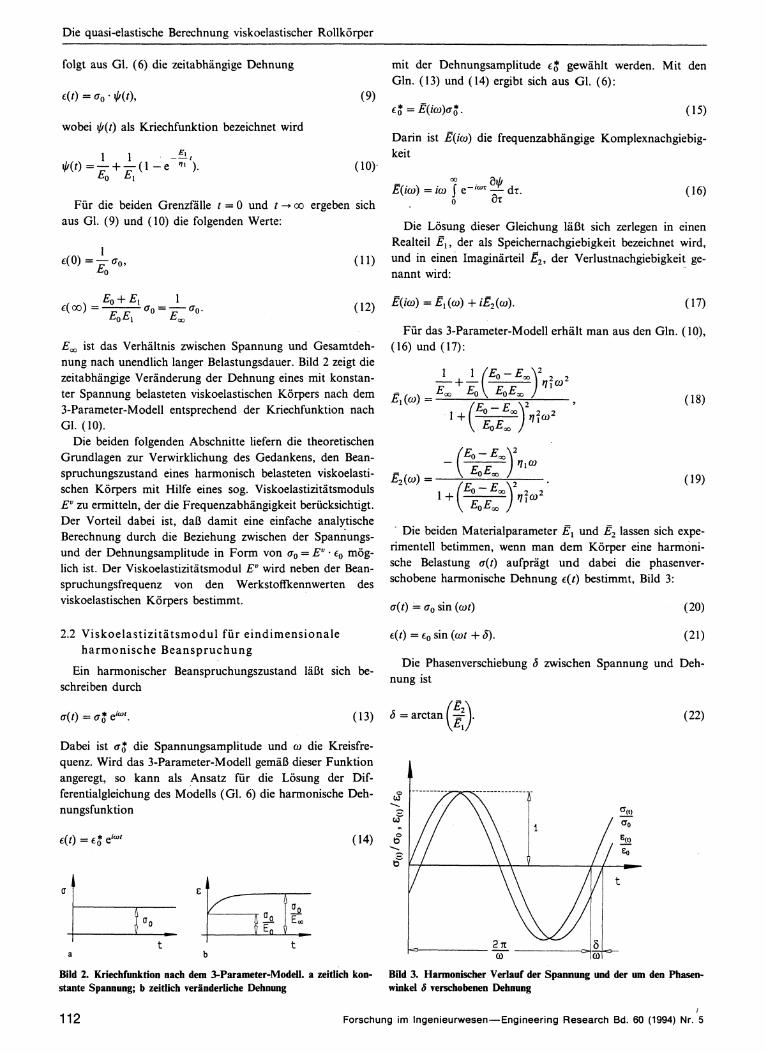
Eo~ ist das Verhfiltnis zwischen Spannung und Gesamtdeh- nung nach unendlich langer Belastungsdauer. Bild 2 zeigt die zeitabh~ingige Ver/inderung der Dehnung eines mit konstan- ter Spannung belasteten viskoelastischen K6rpers nach dem g,(to) = 3-Parameter-Modell entsprechend der Kriechfunktion nach G1. (10).
Die beiden folgenden Abschnitte liefern die theoretischen Grundlagen zur Verwirklichung des Gedankens, den Bean- spruchungszustand eines harmonisch belasteten viskoelasti- schen K6rpers mit Hilfe eines sog. Viskoelastiziffitsmoduls E ~ zu ermitteln, der die Frequenzabh~ingigkeit beriicksichtigt. Der Vorteil dabei ist, dab damit eine einfache analytische Berechnung durch die Beziehung zwischen der Spannungs- und der Dehnungsamplitude in Form von % = EO-eo m6g- lich ist. Der Viskoelastiziffitsmodul E ~ wird neben der Bean- spruchungsfrequenz von den Werkstoffkennwerten des viskoelastischen K6rpers bestimmt.
(17)
Ffir das 3-Parameter-Modell erhS.lt man aus den Gin. (10), (16) und (17)"
1 I (Eo - E ~ V
Eo : ),.=o,. l + Eo< ) .:,,o:
(18)
&(oD t, eoE:, ).,o~ = . (19)
l e o - e~k: :
Die beiden Materialparameter E1 und ,E2 lassen sich expe- rimentell betimmen, wenn man dem K6rper eine harmoni- sche Belastung a(t) aufpr/igt und dabei die phasenver- schobene harmonische Dehnung E(t) bestimmt, Bild 3:
a(t) % sin (tot) (20)
2.2 Viskoe las t i z i t f i t smodu l fiir e i nd imens iona l e h a r m o n i s c h e B e a n s p r u c h u n g
Ein harmonischer Beanspruchungszustand lfiBt rich be- schreiben durch
tr(t) = (7~ e i°Jt. (13)
Dabei ist try' die Spannungsamplitude und to die Kreisfre- quenz. Wird das 3-Parameter-Modell gem/iB dieser Funktion angeregt, so kann als Ansatz fiir die L6sung der Dif- ferentialgleichung des M0dells (GI. 6) die harmonische Deh- nungsfunktion
e( t) = E ~ e i°Jt
I ( l
r
t t b
E(t) = Eo sin (tot + 6). (21)
Die Phasenverschiebung 6 zwischen Spannung und Deh- nung ist
arctan
O'(t )
(14) o ~(,)
g
Biid 2. Kriechfunktion nach dem 3-Parameter-Modell. a zeitlich kon- stante Spannung; b zeitlich verfinderliche Dehnung
Bild 3. Harmonischer Verlauf der Spannung und der um den Phasen- winkel 6 verschobenen Dehnung
112 i
Forschung im Ingenieurwesen--Engineering Research Bd. 60 (1994) Nr. 5
Der Verlustfaktor bzw. D/impfungsfaktor d kann mit l-lille
der Phascnverschiebung bestimmt wcrdcn:
E~ d = tan (6) = - - . (23)
E!
Mit der Amplitude der komplexen Nachgiebigkeit
Eo = x//e~ + E "2, (24)
folgt die Beziehung zwischen den Amplituden o, und Eo
Eo = Eo(tO) " ao. (25)
Um die Analogie zum Hookeschen Gesetz herzustellen, ist
es ffir ein analytisch beschreibbares Modell vorteilhaft, die Beziehung zwischen O'o und % fiber den sog. Viskoelastizitfits- modul E" herzustellen:
E~' . ao = E,, (26)
ILl
2 , 0 -
1,B
1,6 -
1,4
1 ,2
1,0
T E = 0,9 s
~TE = 0.1 S
25
13~ = 0,5
' i 1 | i | w ~ |
0 5o 75 rad/s 100 05
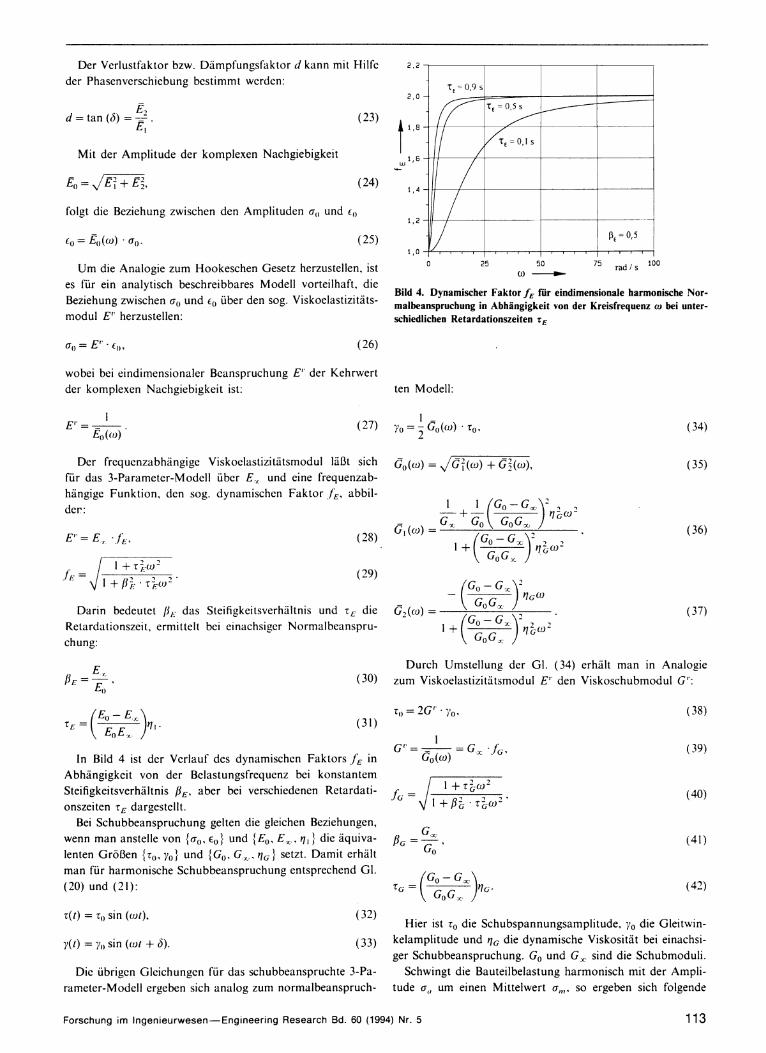
Bild 4. Dynamischer Faktor f e fiir eindimensionale harmonische Nor- maibeanspruchung in Abhfingigkeit yon der Kreisfrequenz to ~ i unter- schiedlichen Retardationszeiten w e
wobei bei eindimensionaler Bcanspruchung E" der Kehrwert der komplexen Nachgiebigkeit ist: ten Modell:
1 E " - _ (27)
Eo(~o)
l _ Yo = -z Go(tO) "'Co, (34) z
Der frequenzabhfingige Viskoelastizitfitsmodul lfigt sich ffir das 3-Parameter-Modell fiber E,~ und eine frequenzab- hfingige Funktion, den sog. dynamischen Faktor rE, abbil- dee:
E"= E ...... .tic, (28)
f t = I + fl~. . r~to" " (29)
Darin bedeutet i l l -das Steifigkeitsverhfiltnis und rE die Retardationszeit, ermittelt bci einachsiger Normalbeanspru- chung:
#E = ~ , (30)
e \ ~.o~7 - v/,. (31)
In Bild 4 ist der Vcrlauf des dynamischen Faktors fE in Abhfingigkeit von der Belastungsfrequenz bei konstantem Steifigkeitsverhfiitnis /¢E, aber bei verschiedenen Retardati-
onszeiten I:E dargestellt. Bei Schubbeanspruchung gelten die gleichen Beziehungen,
wenn man anstelle von {ao, %} und {Eo, E ~ , q~ } die/iquiva- lenten Gr6gen {.co, Yo} und {Go, G .... rla } setzt. Damit erh/ilt man ffir harmonische Schubbeanspruchung entsprechend GI.
(20) und (21):
z(t) = To sin (tot), (32)
y(t) = 70 sin (tOt + 6). (33)
Die fibrigen Gleichungen ffir das schubbeanspruchte 3-Pa- rameter-Modell ergeben sich analog zum normalbeanspruch-
a-o(,O) = , / c ; ( ~ ) + c~(~), (35)
1 1 [ 'Go - G,~'~ 2
= . (36)
~+\ OoO~ /
_ (Go- G~)'- oj Gz(to) = \ GoG~, (37)
1 + \ GoG.:
Durch Umstellung der GI. (34) erhfilt man in Analogie zum Viskoelastizitfitsmodul E" den Viskoschubmodul G":
ro = 2G". 7o, (38)
1 G" - _ - G~ f a , (39)
Go(tO)
X/ 1 + r~to 2 f~; = 1 + / ~ . rato 2' (40)
a , ~
/ / a - Go ' (41)
"ca \ GoG~, qa. (42)
Hier ist Zo die Schubspannungsamplitude, 70 die Gleitwin- kelamplitude und r/a die dynamische Viskositfit bei einachsi- ger Schubbeanspruchung. Go und G~ sind die Schubmoduli.
Schwingt die Bauteilbelastung harmonisch mit der Ampli- tude a,, um einen Mittelwert o" .... so ergeben sich folgende
Forschung im Ingen ieurwesen- -Eng ineer ing Research Bd. 60 (1994) Nr. 5 1 1 3

Die quasi-elastische Berechnung viskoelastischer Rollk6rper
Spannungs- und Dehnungsfunktionen:
a ( t ) = a,,, + a,, -cos (ot), (43)
E(t) = E,,, + E,, "cos (ogt + 6). (44)
Der Dehnungsanteil der statischen Mittelspannung ist
O't~ 1 E., - , (45) E z¢....
die Amplitude des harmonisch schwingenden Anteils ist
O" a E,, - (46)
E ~ f E
Ffir die Maximalwerte ao = O'm + O'a und Eo = E,, + E,, erhfilt man mit GI. (45) und GI. (46) die maximale Dehnung
l I 1 ] Eo = ~ a,,, +f-Ee a,, . (47>
Entspricht die Amplitude cr, gerade der Mittelspannung a , , , so ergibt sich aus G1. (47) und GI. (26) der ffir diesen Belastungszustand gfiltige Viskoelastizitfitsmodul
2f~ E"= E _ ~ - ~ (48)
l + f E
2.3 Viskoelas t iz i t~ i t smodul ffir d r e i d i m e n s i o n a l e ha rmon i sche B e a n s p r u c h u n g
Die im Abschn. 2.2 abgeleiteten Beziehungen gelten ffir den eindimensionalen Beanspruchungszustand. Viele Bauteile werden jedoch dreidimensional beansprucht. Daher wird im folgenden ein Viskoelastizit~itsmodul ermittelt, der dem drei- achsigen Beanspruchungszustand gerecht wird.
Ebenso wie elastische K6rper lassen sich auch viskoelasti- sche K6rper mit Hilfe des Spannungstensors o" o und des Dehnungstensors E,/beschreiben. Die konstitutiven Beziehun- gen lauten ffir lineare, isotrope, viskoelastische K6rper bei Zerlegung des Spannungs- und Dehnungstensors in den de- viatorischen Anteil und in den Kugeltensoranteil:
P" . sii = Q " . eii , (49)
P " " s = Q " . e, (50)
mit
1 sij = a 0 - S a , k a i j , (51)
1 eij = ~-ij - - -3 ('kk(~U' (52)
S = O'11 "]- 0"22 -+- 0"33 , (53)
e = Ell + E22 + E33. (54)
P', Q' und P", Q" sind lineare zeitabhfingige Operatoren. Der deviatorische Anteil beschreibt die Zusammenhfinge zwi- schen den Spannungen und den Dehnungen bei reiner Schub- beanspruchung, der Kugeltensoranteil dagegen bei allseitiger
Normalbelastung. Ffir ideal-elastische K6rper erhSlt man
P ' = I Q ' = 2 G , (55)
P" = 1" Q " = 3 K , (56)
wobei G der Schubmodul und K der Kompressionsmodul ist. In diesem Fall ffihren die GI. (49) und GI. (50) zu den bekannten linear-elastischen Beziehungen:
sij = 2 G " eij , (57)
s = 3 K . e . (58)
Ffir viskoelastische K6rper, die durch das 3-Parameter- Modell abgebildet werden, haben die Operatoren folgende Form:
P" = 1 + Pig ;
( d) Q ' = qog + q i g ~ ;
( d) P " = l + p l , ~ ;
( d ) Q " = qo, +qlk •
(59)
(60)
Bei harmonischer Beanspruchung lautet die Beziehung zwischen der Amplitude des Dehnungstensors und der Am- plitude des Spannungstensors ffir den deviatorischen Anteil:
le,jl = 5 Go(o~) • Is,jl (61)
und ffir den Kugeltensoranteil:
_ le[ = ~ Ko(~) " Isl. (62)
Go(og) ist durch GI. (35) bestimmt. Ro(Og) ist die Amplitude der Komplexnachgiebigkeit ffir allseitige Beanspruchung. In
m Analogie zu Eo(og) gilt:
Ko = v/R~ + R~, (63)
mit
R I ((J')) K.__~ ..~..~oo " g o k ~ ~ ' . 2 ( . / ) 2 = (64)
K o - K o ~ " , 2 1+ , - r/7<oJ
und
g2(~ ) \ K o K ~ ] ~IKa~ = (65) {Ko- K~V 1+ ~, K'o'-'K--~ ) q ~:°~2
Die Gr6Ben Ko und Ko~ sind hier die Kompressionsmoduli. qK ist die dynamisciae Viskositfit bei allseitiger Beanspru-
114 Forschung irn IngenieurwesenwEngineering Research Bd. 60 (1994) Nr. 5

chung. Durch den Vergleich der konstanten Werte si, und e o (GI. 57) mit den Amplituden ]sul und leo. { (GI. 61)erkennt man, dab beim Ubergang vom elastischen Zustand in den viskoelastischen Zustand der Schubmodul G (GI. 57) in den Viskoschubmodui G" (GI. 61) fibergeht
1 G ~ G ' = - - _ . (66)
Go
Entsprechend erhfilt man durch den Vergleich von s und e
(GI. 58)mit ]s Iund le[ (GI. 62)"
1 K --, K " = _-=--. (67)
Ko
K" ist der Viskokompressionsmodul. Zur Berechnung der Spannungs- und Dehnungszustfinde
werden der Viskoelastizit~itsmodul E" und die Viskoquerkon- traktionszahl v" ben6tigt. Ober die bekannten Beziehungen
t C.9
, , a - -
13~= 0,5
[3¢= 0,9
"~= 0,5 s [3~= 0,1 .... v = 0,4
/ . . . . .
- " 1 t i , ~ r J , 1 , ~ 1
0 2'5 50 75 rad / s 100
Biid 5. Dynamischer Faktor f~ for dreidimensionale harmonische Be- anspruchung in Abhfingigkeit von der Kreisfrequenz o bei unterschied- lichen Steifigkeitsverhfiitnissen ~E
9 K ' G E = ~ (68)
3 K + G
und
1 3 K - 2 G . . . . . (69)
2 3 K + G
ffir den elastischen Zustand erh~ilt man mit Hilfe der G1. (66) und der GI. (67)'
9 E " = _ _ (70)
Ko + 3Go
und
1 3 G o - 2Ko v " = - - _ _ . (71)
2 Ko + 3Go
Hierzu ist zu bemerken, dab E" und v" vonder Frequenz co abh~ingen. Mit diesen beiden Gr6Ben lassen sich bei der quasi-elastischen Berechnungsmethode die Spannungs- und Dehnungsamplituden ffir einen viskoelastischen K6rper bei harmonischer Beanspruchung berechnen.
Der Viskoelastizitfitsmodul bei dreiachsiger Beanspru- chung erh~lt eine einfache Form, wenn mit einer fre- quenzunabhfingigen Querkontraktionszahl gerechnet wird. Aus GI. (71) folgt mit v"= v:
Go 2( 1 + v) ~oo = 3(1 - 2~'---------'--~ (72)
Das bedeutet, dab Go und /~o in einer festen Beziehung zueinander stehen und daher der Viskoelastizitfitsmodul nach den Gin. (70) und (72) jetzt folgende Form erhfilt:
2(1 + v) E " = ~ _ (73)
Go
Mit Hilfe von GI. (39) und der elastischen Materialpara-
meterbeziehung
E G = ~ (74)
2(1 + v)
folgt daraus
1 2( 1 + v) G o - G = "fG - E = "fG (75)
Hat der Werkstoff im Zugversuch und im Schubversuch die gleiche dynamische Viskosit~it, so folgt aus G1. (40) mit r/c = r/l ffir den dynamischen Faktor fc"
N/ 1 + 4( 1 + v)2z~co "-" (76)
Bild 5 zeigt die AbhS.ngigkeit von fo von der Frequenz co und den Werkstoffparametern fiE, z E und v. Der Viskoelasti- zitfitsmodul ffir dreidimensionale Beanspruchung nach GI. (73) nimmt dann unter Berficksichtigung der G1. (75) fol- gende Form an:
E " = E~ "fG- (77)
Der Vorteil der G1. (76) ist, dab der Kennwert f6 ffir den dreidimensionalen Beanspruchungszustand durch Material- kennwerte bestimmt ist, die im eindimensionalen Zugversuch ermittelt werden k6nnen.
Wenn eine harmonische Belastung in folgender Form vor- liegt:
a u = ~ . [ 1 + cos (cot)], (78)
erhfilt man analog zur eindimensionalen Beanspruchung ffir den Sonderfall o ' a - o',,, den Viskoelastizit~itsmodul bei har- monischer, dreiachsiger Beanspruchung
2f~ E" = E (79)
l + f 6
3. A n w e n d u n g der q u a s i - e l a s t i s c h e n M e t h o d e a u f den
v i s k o e l a s t i s c h e n R o i l k 6 r p e r
Im folgenden wird gezeigt, wie mit Hilfe des Viskoelastizi- tfitsmoduls das mechanische Verhalten eines rollenden K6r-
Forschung im I n g e n i e u r w e s e n - - E n g i n e e r i n g Research Bd. 60 (1994) Nr. 5 115
Die quasi-elastische Berechnung viskoelastischer Rollkrrper
pers aus viskoelastischem Material unter Normalbelastung
nfiherungsweise analytisch berechnet werden kann. Der Gedankengang, auf dem die Vorgehensweise beruht,
soil anhand von Bild 6 erl/iutert werden. Bild 6a zeigt den mit
einer konstanten Normalkraft F_-o belasteten und mit der Winkelgeschwindigkeit co = V/R rollenden K6rper. Der zeit-
lich ver/inderliche Beanspruchungszustand an einer bestimm-
ten Stelle in diesem K6rper entspricht nfiherungsweise dem Beanspruchungszustand, den der stehende Rollk6rper, Bild
6b, erf/ihrt, wenn er mit der harmonischen Belastung
F_ 0 F__ = ~-- (1 + cos cot) (80)
beaufschlagt wird. Die Kreisfrequenz o9 der zyklischen Bela- stung entspricht der Winkelgeschwindigkeit des Rollkrrpers.
Der Schritt von Bild 6b nach Bild 6c beschreibt den
Obergang von dem durch die Grrl3en {E~:, v,/3 E, rE} ge-
kennzeichneten viskoelastischen Krrper auf den quasi-elasti- schen Krrper. Da dieser fiber den ViskoelastizitS.tsmodul E"
beschrieben wird, und der Viskoelastizit/itsmodul die harmo- nische Beanspruchungsfunktion berficksichtigt, kann der rol-
lende Krrper jetzt im stehenden Zustand und unter einer konstanten Normalkraft berechnet werden. Damit ist die
Berechnung des viskoelastischen, rollenden Krrpers auf eine quasi-elastische Berechnung zurfickgeffihrt, mit dem Vorteil, dab nun die bekannten analytischen Lrsungen aus der Elasti-
zitfitstheorie auf einen Krrper aus viskoelastischem Material angewendet werden krnnen. Da der Belastungsverlauf in
Bild 6b fiquivalent zur GI. (78) schwellend harmonisch ist, mul3 ffir die quasi-elastische Berechnung des viskoelastischen
Rollkrrpers der Viskoelastizitfitsmodul E" nach GI. (79)
verwendet werden. Die Genauigkeit der Berechnungsergebnisse hfingt in erster
Linie davon ab, wie gut der Beanspruchungszustand beim
rollenden Krrper durch den Beanspruchungszustand beim Ersatzsystem nach Bild 6b approximiert wird. Eine experi- mentelle Oberprfifung ist mrglich, indem die maximale Druckspannung und die maximale Kontaktfl/ichenlfinge bei
unterschiedlichen Rollgeschwindigkeiten bzw. Kreisfre- quenzen gemessen und miteinander verglichen werden. Einen
Hinweis daffir, dab die Approximation durch eine einfache harmonische Belastungsfunktion zu guten Ergebnissen ffihrt,
findet man bei Miehe [8]. Unter Vorgabe einer schwellend
harmonischen Radverformung bei einem stillstehenden vis-
koelastischen Radkrrper, berechnet er die Eigenerw~irmung des Rades mit der Finite-Elemente-Methode ffir den statio-
Viskoelastischer Korpe r Quasi-elastischer KOrper E~, v, [3 E, r E E v
a b c
Bild 6. Zur Erkl~rung der Berechnung viskoelastischer roilender K/ir- per mit Hilfe der quasi-elastischen Methode
Z
Korper 1 FZ ,
Korper 2
{4orper 1 Fz
c D
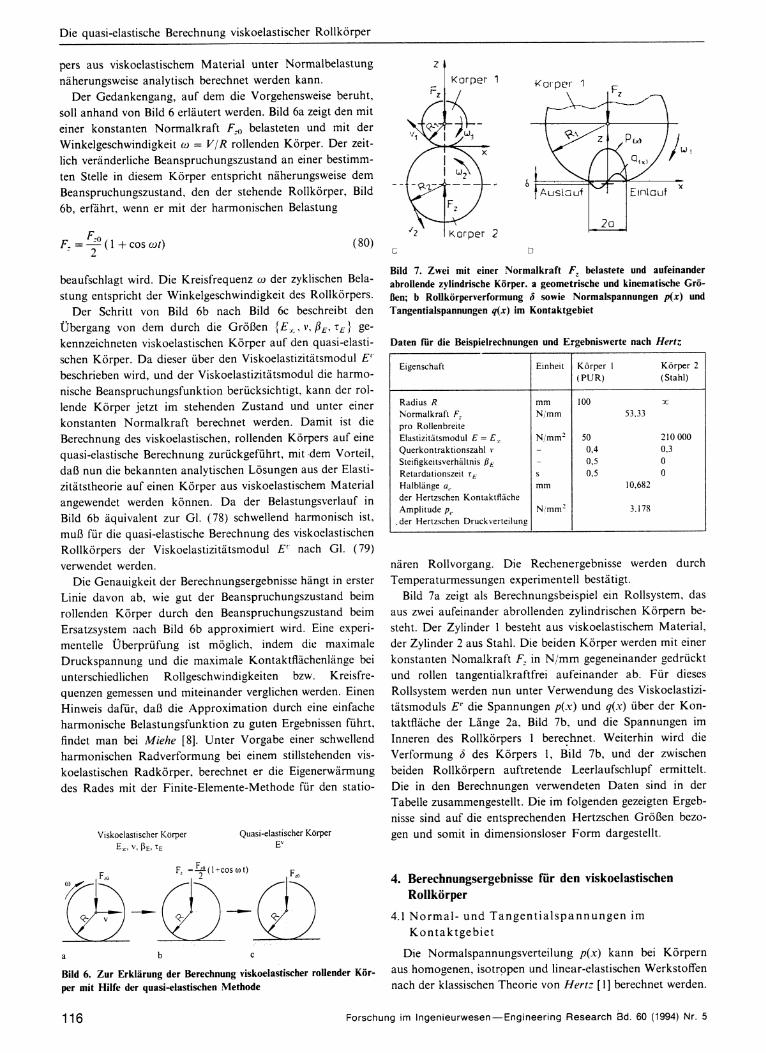
Bild 7. Zwei mit einer Normaikraft F z belastete und aufeinander abroilende zylindrische K6rper. a geometrische und kinematische Gr6- lien; b Rollk6rperverformung /J sowie Normalspannungen p(x) und Tangentialspannungen q(x) im Kontaktgebiet
Daten for die Beispielrechnungen und Ergebniswerte nach Hertz
Eigenschaft
Radius R Normalkraft F_ pro Rollenbreite Elastizit/.itsmodul E = E~_ Querkontraktionszahl v Steifigkeitsverh/iltnis /3,~: Retardationszeit r~. Halbl/,inge a,. der Hertzschen Kontaktfliiche Amplitude p,.
.der Hertzschen Druckverteilung
Einheit
m m
N/ram
N / r a m 2
s
mm
N/mm 2
K6rper 1 K6rper 2 (PUR) (Stahl)
100 zc 53,33
50 210 000 0,4 0.3 0,5 0 0,5 0
10,682
3,178
nfiren Rollvorgang. Die Rechenergebnisse werden durch
Temperaturmessungen experimentell bcstfitigt. Bild 7a zeigt als Berechnungsbeispiel ein Rollsystem, das
aus zwei aufeinander abrollenden zylindrischen Krrpern be-
steht. Der Zylinder 1 besteht aus viskoelastischem Material, der Zylinder 2 aus Stahl. Die beiden Krrper werden mit einer
konstanten Nomalkraft F_. in N/mrn gegeneinander gedrfickt und rollen tangentialkraftfrei aufeinander ab. Ffir dieses Rollsystem werden nun unter Verwendung des Viskoelastizi-
t~itsmoduls E" die Spannungen p(x) und q(x) fiber der Kon- taktfl/iche der L/inge 2a, Bild 7b, und die Spannungen im
Inneren des Rollkrrpers 1 berechnet. Weiterhin wird die Verformung 6 des K6rpers 1, Bild 7b, und der zwischen
beiden Rollk6rpern auftretende Leerlaufschlupf ermittelt. Die in den Berechnungen verwendeten Daten sind in der
Tabelle zusammengestellt. Die im folgenden gezeigten Ergeb-
nisse sind auf die entsprechenden Hertzschen Gr66en bezo-
gen und somit in dimensionsloser Form dargestellt.
4. B e r e c h n u n g s e r g e b n i s s e fiir den v i s k o e l a s t i s c h e n
R o i l k 6 r p e r
4.1 N o r m a l - und T a n g e n t i a l s p a n n u n g e n im
K o n t a k t g e b i e t
Die Normalspannungsverteilung p(x) kann bei K6rpern
aus homogenen, isotropen und linear-elastischen Werkstoffen
nach der klassischen Theorie yon Hertz [1] berechnet werden.
116 Forschung im Ingenieurwesen--Engineering Research 8d. 60 (1994) Nr. 5
Die Theorie setzt voraus, dab das Kontaktgebiet reibungsfrei ist ( / a - 0), d.h. dab dort keine Tangentialspannungen wir- ken. Wie Buf f e r [9] zeigt, ist der EinfluB der Reibung auf die Normalspannungsverteilung vernachlfissigbar gering. Die Be- rechnung des viskoelastischen K6rpers mit Hilfe der Hertz- schen Theorie erfolgt unter Verwendung des Viskoela- stizit/itsmoduls. Da bei dem zu berechnenden Rollsystem der K6rper 1 aus viskoelastischem Material besteht, ist der Ela- stizit~itsmodul El durch den Viskoelastizitfitsmodul E'~ zu ersetzten. Ffir den ebenen Form~inderungszustand lauten dann die quasi-Hertzschen Gleichungen:
~ 'F_R a v - -
• • E,* (81)
2 . F _
p , , - - (82) x • a,.
Hierbei ist a,, die frequenzabhfingige halbe Kon- taktflfichenlfinge und p,. die frequenzabhfingige maximale Druckspannung. Der Ersatzradius R berechnet sich nach der Gleichung:
1 R = ~ (83)
1 1 '
Rl R2
und der Ersatz-Elastizit~itsmodul E,* zu
1 E,* = (84)
1 -- v 2 1 -- v ~ ' ~ .-Jr- ~
E~i E2
mit El' nach GI. (79). Ffir den Sonderfall, dab die Beanspru- chungsfrequenz 09 gleich Null ist, entsprechen die fre- quenzabhf.ngigen Gleichungen (81) und (82) den Hertzschen L6sungen
a~,(09 = 0) = ae" (85)
Pv(09 = O) = Pe.
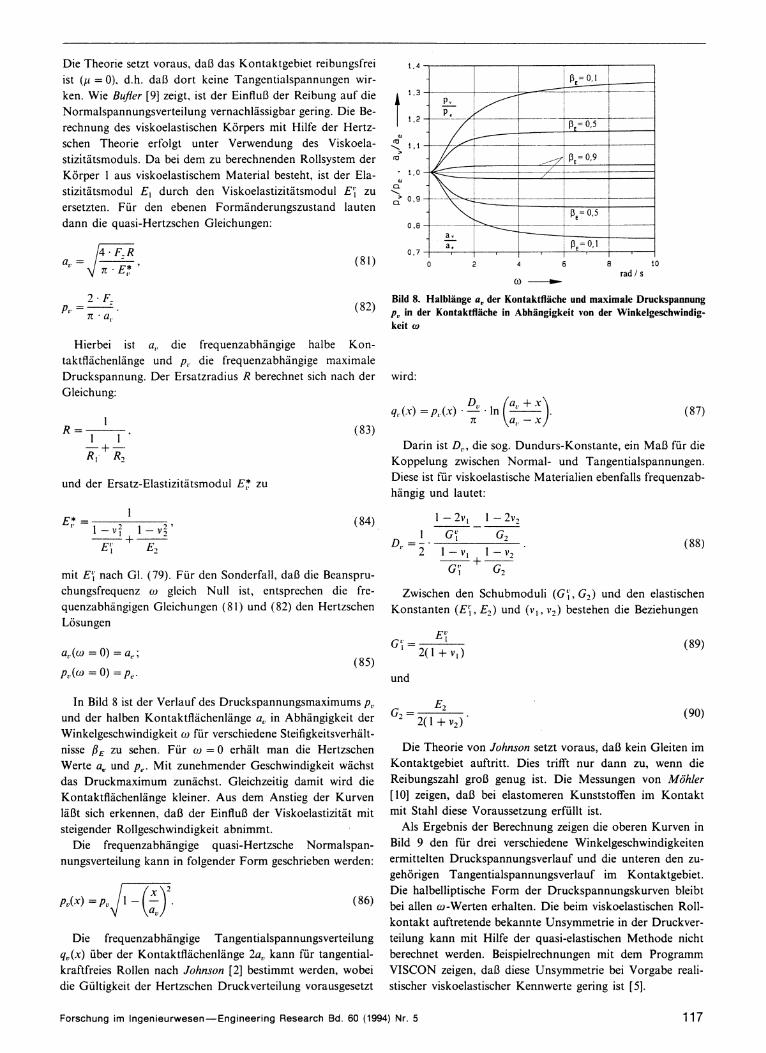
In Bild 8 ist der Verlauf des Druckspannungsmaximums p,, und der halben Kontaktfl~ichenl~inge av in Abhfingigkeit der Winkelgeschwindigkeit 09 ffir verschiedene Steifigkeitsverh~ilt- nisse fie zu sehen. Ffir 09 = 0 erh~ilt man die Hertzschen Werte a, und Pe- Mit zunehmender Geschwindigkeit w~ichst das Druckmaximum zun~ichst. Gleichzeitig damit wird die Kontaktflfichenl/inge kleiner. Aus d e m Anstieg der Kurven l~il3t sich erkennen, dab der Einflul3 der Viskoelastizit~it mit steigender Rollgeschwindigkeit abnimmt.
Die frequenzabh/ingige quasi-Hertzsche Normalspan- nungsverteilung kann in folgender Form geschrieben werden:
p, , (x) = pv 1 - . (86)
Die frequenzabhfingige Tangentialspannungsverteilung qv ( x ) fiber der Kontaktfl/ichenlfinge 2av kann ffir tangential- kraftfreies Rollen nach J o h n s o n [2] bestimmt werden, wobei die Gfiltigkeit der Hertzschen Druckverteilung vorausgesetzt
1 , 4 - .
1 3 -
> r o
- 1 , 0 ~u
12.
ca~ 0 , 9
0 , 8
0 , 7
pv t
av a,
f
1 d
[3= 0,5
. / j 13E=0,9 I
t I ~-= o,5
, ! 13E; 0,1
| i '
0 2 4 6 8 1 0
rad / s 03
Bild 8. Halbif inge a~ der Kontakttlf iche und m a x i m a l e Druckspannung p~ in der Kontaktflf iche in Abhfingigkeit yon der Winke lgeschwindig- keit co
wird:
q, . (x) = p~.(x) • ~D~r~ " I n ( a~'a,, +x)_ x . (87)
Darin ist D,,, die sog. Dundurs-Konstante, ein MaB ffir die Koppelung zwischen Normal- und Tangentialspannungen. Diese ist ffir viskoelastische Materialien ebenfalls frequenzab- h~ingig und lautet:
1 - 2v~ 1 - 2v 2
1 G'i' G2 D,. = - . (88)
2 1 --v I 1 - v 2 t
G~' G 2
Zwischen den Schubmoduli (G~', G2) und den elastischen Konstanten (E'i, E2) und (v 1, v2) bestehen die Beziehungen
e~ G]' = 2( 1 + v~) (89)
und
E~ G2 = ~ (90)
2( 1 + v2)
Die Theorie von J o h n s o n setzt voraus, dab kein Gleiten im Kontaktgebiet auftritt. Dies trifft nur dann zu, wenn die Reibungszahl grol3 genug ist. Die Messungen yon M 6 h l e r
[10] zeigen, daft bei elastomeren Kunststoffen im Kontakt mit Stahl diese Voraussetzung erffillt ist.
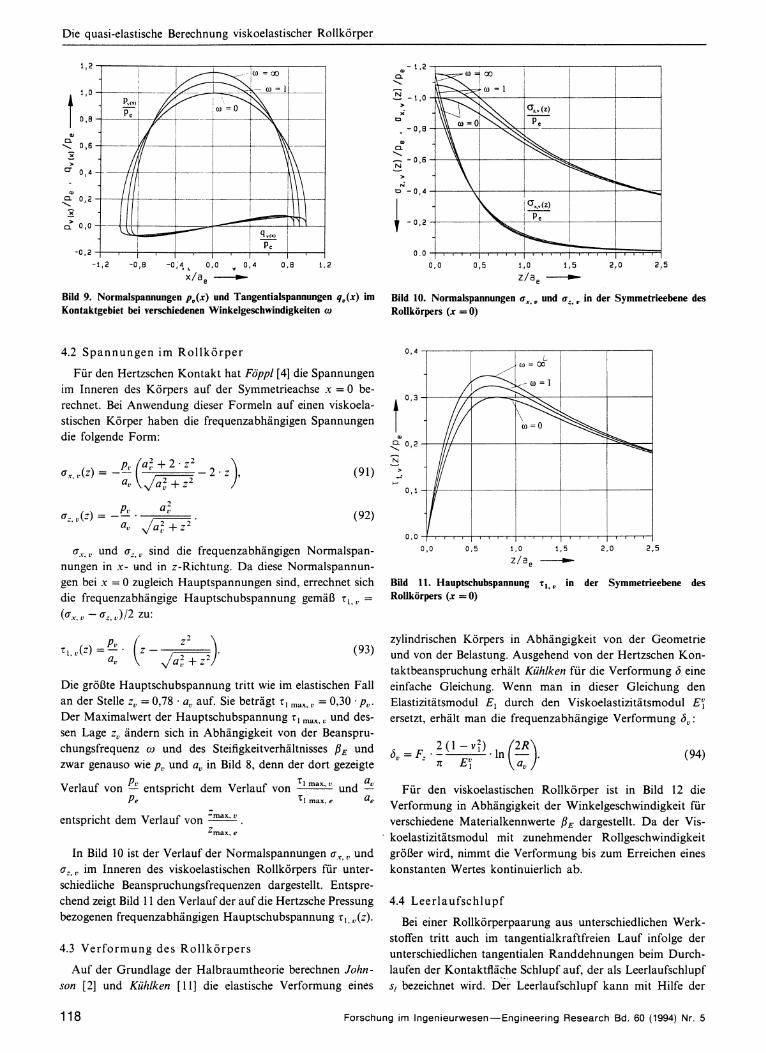
Als Ergebnis der Berechnung zeigen die oberen Kurven in Bild 9 den f/Jr drei verschiedene Winkelgeschwindigkeiten ermittelten Druckspannungsverlauf und die unteren den zu- geh6rigen Tangentialspannungsverlauf im Kontaktgebiet. Die halbelliptische Form der Druckspannungskurven bleibt bei allen 09-Werten erhalten. Die beim viskoelastischen Roll- kontakt auftretende bekannte Unsymmetrie in der Druckver- teilung kann mit Hilfe der quasi-elastischen Methode nicht berechnet werden. Beispielrechnungen mit dem Programm VISCON zeigen, dal3 diese Unsymmetrie bei Vorgabe reali- stischer viskoelastischer Kennwerte gering ist [5].
Forschung im Ingenieurwesen--Engineering Research Bd. 60 (1994) Nr. 5 117
Die quasi-elastische Berechnung viskoelastischer Rollk6rper
1,2
Io
,,7 0,6
-g
o" 0,4
m 0,2
c:~ 0,0
-0,2
P,.~.
, !
IIIi ,2 -0 8
• co 1]
q,(x) !
-0;4 ~ 0,0 , 0,4 0,8 1
x / a e
BUd 9. Normalspannungen po(x) und Tangent ia lspannungen q~(x) im
Kontaktgebiet bei verschiedenen Winkelgeschwindigkei ten
- 1 , 2 - m
...-,, -t,0 x lza
. - 0 , 8
~ - 0 , 6 N
M - 0 , 4
I - 0 , 2
0.0
0 ,0
, (:Y~.v(z)
i Pc I
! ~ , . . . . I . . . . I . . . . . . . .
0,5 1,o i , 5 2 o 2
z / a e
Bild I0. Normalspannungen try, v und tr=,, in der Symmetr ieebene des
Rollk6rpers (x = O)
4.2 Spannungen im Ro l lk6rper
Ffir den Hertzschen Kontakt hat F6ppl [4] die Spannungen im Inneren des K6rpers auf der Symmetrieachse x = 0 be- rechnet. Bei Anwendung dieser Formeln auf einen viskoela- stischen K6rper haben die frequenzabh/ingigen Spannungen die folgende Form:
(z) = -P" (a_~ +__ 2-_. z 2 ) " " a, , \x /a 2 + z 2 - 2 " z , (91) o- x
P,, av or.., v(z) . . . . ( 92 ) a. + z
~rx.,, und cr..,v sind die f requenzabhf ing igen N o r m a l s p a n -
nungen in x- und in z-Richtung. Da diese Normalspannun- gen bei x --0 zugleich Hauptspannungen sind, errechnet sich die frequenzabh~ingige Hauptschubspannung gemfil3 Zl.v = (~x, v - cT=, , , ) /2 zu:
:_(_:-z2) zl.v(z) P~ z - . (93)
Die gr613te Hauptschubspannung tritt wie im elastischen Fall an der Stelle z~, = 0,78 • a~ auf. Sie betrS.gt ~:~ m,x. ~ = 0,30 • Pv" Der Maximalwert der Hauptschubspannung 171 m . . . . . und des- sen Lage z~ 5.ndern sich in Abh~ingigkeit yon der Beanspru- chungsfrequenz co und des Steifigkeitverh/iltnisses Be und zwar genauso wie Pv und a~ in Bild 8, denn der dort gezeigte
Verlauf von p~ entspricht dem Verlauf yon ~!.max. v und a~ Pe 171 max, e ae
Emax, v entspricht dem Verlauf von ~ .
Zmax, e
In Bild 10 ist der Verlauf der Normalspannungen trx,~ und tr_v im Inneren des viskoelastischen Rollk6rpers ffir unter- schiediiche Beanspruchungsfrequenzen dargestellt. Entspre- chend zeigt Bild 11 den Verlauf der auf die Hertzsche Pressung bezogenen frequenzabhfingigen Hauptschubspannung z~, ~(z).
4.3 Verformung des Ro l lk6rpers
Auf der Grundlage der Halbraumtheorie berechnen John- son [2] und Kiihlken [11] die elastische Verformung eines
0,4
0 ,3
t . .~ 0 , 2 -
S ~_~ >
0,1 -
0,0
0,0
t
/ / ' i [ 1
i ~ w l , | i |
o 5 ~,o 1,5 2 o 2 5
z/a e
Biid l 1. Hauptschubspannung ~ , v in der Symmetr ieebene des Roilk6rpers (x = 0)
zylindrischen K6rpers in Abh~ingigkeit von der Geometrie und von der Belastung. Ausgehend von der Hertzschen Kon- taktbeanspruchung erh/ilt Kiihlken f/Jr die Verformung 6 eine einfache Gleichung. Wenn man in dieser Gleichung den Elastizit~itsmodul Et durch den Viskoelastizit~itsmodul E~ ersetzt, erh~ilt man die frequenzabh~ingige Verformung 6v:
6 v = F 2 ( l - v 2 ) i n ( 2 R ) "~ E---"-'~l" " (94)
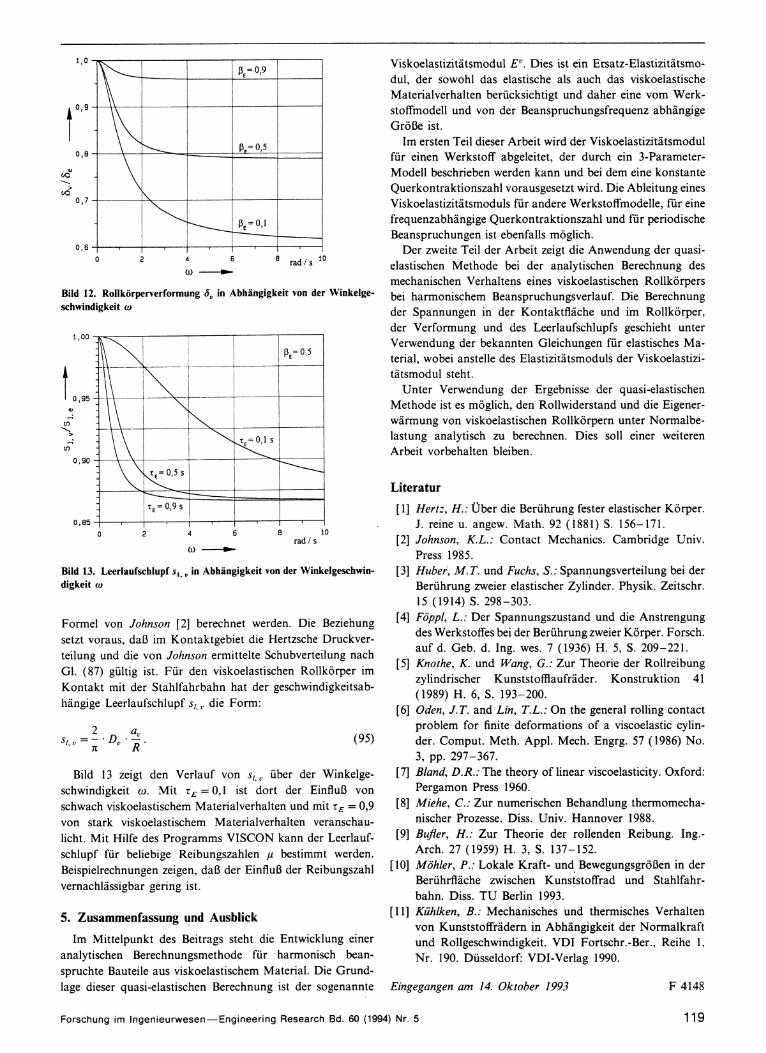
Ffir den viskoelastischen Rollk6rper ist in Bild 12 die Verformung in Abhfingigkeit der Winkelgeschwindigkeit fiir verschiedene Materialkennwerte fie dargestellt. Da der Vis- koelastizitfitsmodul mit zunehmender Rollgeschwindigkeit gr6Ber wird, nimmt die Verformung bis zum Erreichen eines konstanten Wertes kontinuierlich ab.
4.4 Leer laufsch lupf
Bei einer Rollk6rperpaarung aus unterschiedlichen Werk- stoffen tritt auch im tangentialkraftfreien Lauf infolge der unterschiedlichen tangentialen Randdehnungen beim Durch- laufen der Kontaktfl/iche Schlupf auf, der als Leerlaufschlupf st bezeichnet wird. Der Leerlaufschlupf kann mit Hilfe der
118 Forschung im I n g e n i e u r w e s e n u E n g i n e e r i n g Research Bd. 60 (1994) Nr. 5
1,0
0,9
0,8 -
0,7 -
0 , 6 -
o i
lIE= 0,9
[3~= 0,5
13 E = 0,1
I f
2 4 s e rad/s lo co
Bild 12. Rolik6rperverformung 6v in Abh~ingigkeit von der Winkelge- schwindigkeit oJ
1,00 !
O,f15
, i [ 0 , = o , 5
i ; ........ . . . . . . . . . . . .
~E = 0,9 s
, i ' J ' I ' o 2 4 6 fl lo
rad / s 03
Bild 13. Leerlaufschlupf s~, v in Abhi ing igke i t von der Winke lgeschwin-
digkeit ¢o
Formel von Johnson [2] berechnet werden. Die Beziehung setzt voraus, dab im Kontaktgebiet die Hertzsche Druckver- teilung und die von Johnson ermittelte Schubverteilung nach G1. (87) gfiltig ist. Ffir den viskoelastischen Rollk6rper im Kontakt mit der Stahlfahrbahn hat der geschwindigkeitsab- hfingige Leerlaufschlupf ScL. die Form:
2 a v sl. ~ = - " Dv " - - . (95)
R
Bild 13 zeigt den Verlauf von Scv fiber der Winkelge- schwindigkeit co. Mit rE=0 ,1 ist dort der EinfluB von schwach viskoelastischem Materialverhalten und mit rE = 0,9 von stark viskoelastischem Materialverhalten veranschau- licht. Mit Hilfe des Programms VISCON kann der Leerlauf- schlupf ffir beliebige Reibungszahlen p bestimmt werden. Beispielrechnungen zeigen, dab der Einflul3 der Reibungszahl vernachl~issigbar gering ist.
5 . Z u s a m m e n f a s s u n g u n d A u s b l i c k
Im Mittelpunkt des Beitrags steht die Entwicklung einer analytischen Berechnungsmethode ffir harmonisch bean- spruchte Bauteile aus viskoelastischem Material. Die Grund- lage dieser quasi-elastischen Berechnung ist der sogenannte
Viskoelastizit~itsmodul E v. Dies ist ein Ersatz-Elastizit/itsmo- dul, der sowohl das elastische als auch das viskoelastische Materialverhalten berficksichtigt und daher eine vom Werk- stoffmodell und vonder Beanspruchungsfrequenz abh/ingige Gr613e ist.
Im ersten Teil dieser Arbeit wird der Viskoelastizit~itsmodul ffir einen Werkstoff abgeleitet, der durch ein 3-Parameter- Modell beschrieben werden kann und bei dem eine konstante Querkontraktionszahl vorausgesetzt wird. Die Ableitung eines Viskoelastizit/itsmoduls ffir andere Werkstoffmodelle, ffir eine frequenzabhfingige Querkontraktionszahl und ffir periodische Beanspruchungen ist ebenfalls m6glich.
Der zweite Teil der Arbeit zeigt die Anwendung der quasi- elastischen Methode bei der analytischen Berechnung des mechanischen Verhaltens eines viskoelastischen Rollk6rpers bei harmonischem Beanspruchungsverlauf. Die Berechnung der Spannungen in der Kontaktfl~iche und im Rollk6rper, der Verformung und des Leerlaufschlupfs geschieht unter Verwendung der bekannten Gleichungen ffir elastisches Ma- terial, wobei anstelle des Elastizit~tsmoduls der Viskoelastizi- tfitsmodul steht.
Unter Verwendung der Ergebnisse der quasi-elastischen Methode ist es m6glich, den Rollwiderstand und die Eigener- w~irmung von viskoelastischen Rollkrrpern unter Normalbe- lastung analytisch zu berechnen. Dies soil einer weiteren Arbeit vorbehalten bleiben.
L i t e r a t u r . .
[1] Hertz, H." Uber die Berfihrung fester elastischer K6rper. J. reine u. angew. Math. 92 (1881) S. 156-171.
[2] Johnson, K.L.: Contact Mechanics. Cambridge Univ. Press 1985.
[3] Huber, M.T . und Fuchs, S." Spannungsverteilung bei der Berfihrung zweier elastischer Zylinder. Physik. Zeitschr. 15 (1914) S. 298-303.
[4] Frppl, L." Der Spannungszustand und die Anstrengung des Werkstoffes bei der Berfihrung zweier K6rper. Forsch. auf d. Geb. d. Ing. wes. 7 (1936) H. 5, S. 209-221.
[5] Knothe, K. und Wang, G. "Zur Theorie der Rollreibung zylindrischer Kunststofttaufr~ider. Konstruktion 41 (1989) H. 6, S. 193-200.
[6] Oden, J.T. and Lin, T.L." On the general rolling contact problem for finite deformations of a viscoelastic cylin- der. Comput. Meth. Appl. Mech. Engrg. 57 (1986) No. 3, pp. 297-367.
[7] Bland, D.R. "The theory of linear viscoelasticity. Oxford: Pergamon Press 1960.
[8] Miehe, C.: Zur numerischen Behandlung thermomecha- nischer Prozesse. Diss. Univ. Hannover 1988.
[9] Buffer, H.: Zur Theorie der rollenden Reibung. Ing.- Arch. 27 (1959) H. 3, S. 137-152.
[10] Mrhler, P.: Lokale Kraft- und Bewegungsgr613en in der Berfihrflache zwischen Kunststoffrad und Stahlfahr- bahn. Diss. TU Berlin 1993.
[11] Kiihlken, B." Mechanisches und thermisches Verhalten von Kunststoffr~idern in AbMngigkeit der Normalkraft und Rollgeschwindigkeit. VDI Fortschr.-Ber., Reihe 1, Nr. 190. Dfisseldorf: VDI-Verlag 1990.
Eingegangen am 14. Oktober 1993 F 4148
Forschung im Ingen ieurwesen- -Eng ineer ing Research Bd. 60 (1994) Nr. 5 119
Related Documents











