Development of a Novel Fiber-Coupled Three Degree-of-Freedom Displacement Interferometer by Steven R. Gillmer Submitted in Partial Fulfillment of the Requirements for the Degree Master of Science Supervised by Jonathan D. Ellis Department of Mechanical Engineering Arts, Sciences and Engineering Edmund A. Hajim School of Engineering and Applied Sciences University of Rochester Rochester, New York 2013

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Development of a Novel Fiber-Coupled
Three Degree-of-Freedom Displacement
Interferometer
by
Steven R. Gillmer
Submitted in Partial Fulfillmentof the
Requirements for the Degree
Master of Science
Supervised by
Jonathan D. Ellis
Department of Mechanical EngineeringArts, Sciences and Engineering
Edmund A. Hajim School of Engineering and Applied Sciences
University of RochesterRochester, New York
2013

ii
Dedication
This thesis is dedicated to my godfather, Thomas Clarke, whose passion for science
and technology has inspired me to be where I am today.

iii
Curriculum Vitae
Steven R. Gillmer was born in Albuquerque, New Mexico. He attended the
University of Rochester, and graduated cum laude with a Bachelor of Science
degree in Mechanical Engineering in 2011. He began master’s studies in Mechanical
Engineering at the University of Rochester in 2011. He pursued his research in
opto-mechanics and precision engineering under the advisement of Dr. Jonathan D.
Ellis.

iv
Acknowledgments
Thank you to Dr. Jonathan Ellis, whose skills and expertise in the field of
displacement interferometry were invaluable for this research. I would also like to
thank Dr. Thomas Brown and Dr. John Lambropoulos for serving on my thesis
committee and offering their input for my research. A special thank you to Helen
Clarke for all of the editing she did on the writing in this thesis. Finally, I would like
to thank my mother, Virginia Gillmer, for all of her support throughout my graduate
education.

v
Abstract
Heterodyne displacement interferometry is a widely accepted methodology capable of
measuring displacements with sub-nanometer resolution. The objective of this thesis
is to demonstrate a compact, fiber-delivered displacement measuring interferometer
which can be used to simultaneously calibrate the linear motion and rotational errors
of a translating stage using a single measurement beam. Heterodyne interferometry
is ideal for this type of high resolution stage feedback sensing because of its high
dynamic range, high signal-to-noise ratio, and direct traceability to the meter.
There are a variety of benefits to fiber-delivered interferometers for stage
metrology. First, the interferometer alignment is decoupled from the laser alignment.
The overall setup can be divided into subsystems to more easily identify and rectify
misalignments. Simplified alignment and division into subsystems increases the
stability of the structure because the metrology footprint is significantly reduced.
Many beam routing optics can be eliminated and the heterodyne laser (a heat source)
can also be isolated from the stage measurement site.
Ongoing work towards a compact, three degree-of-freedom fiber-delivered
heterodyne interferometer will be presented. This novel interferometer utilizes
differential wavefront sensing to measure target mirror displacement, pitch, and
yaw. Differential wavefront sensing uses a quadrant photodiode to measure four

vi
spatially separated interference signals within a single optical interference beam.
Based on the geometry of the detector and the interference phase in each quadrant,
the displacement and changes in target pitch and yaw can be measured.

vii
Table of Contents
Dedication ii
Curriculum Vitae iii
Acknowledgments iv
Abstract v
List of Figures x
1 Introduction 1
1.1 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Displacement Interferometry Theory . . . . . . . . . . . . . . . . . . 6
1.3 Displacement Interferometry Background . . . . . . . . . . . . . . . . 14
1.4 Towards a Multi-DOF Interferometer . . . . . . . . . . . . . . . . . . 21
2 Working Principles of the Multi-DOF Interferometer 23
2.1 Acousto-Optic Modulators . . . . . . . . . . . . . . . . . . . . . . . . 25

viii
2.2 Fiber Optic Coupling . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.3 Differential Wavefront Sensing . . . . . . . . . . . . . . . . . . . . . . 33
2.4 Preliminary Benchtop Data . . . . . . . . . . . . . . . . . . . . . . . 36
2.5 Technology Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3 System Design 42
3.1 First Design Iteration . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.2 Second Design Iteration . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.3 Future Design Implementations . . . . . . . . . . . . . . . . . . . . . 73
4 Interferometer Qualification 75
4.1 Benchtop Qualification Measurements . . . . . . . . . . . . . . . . . . 75
4.2 Working Prototype Qualification . . . . . . . . . . . . . . . . . . . . 95
4.3 Qualification Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . 99
5 Periodic Nonlinearity 102
5.1 The Michelson Interferometer . . . . . . . . . . . . . . . . . . . . . . 105
5.2 Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
5.3 Laboratory Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
5.4 Future Error Reduction . . . . . . . . . . . . . . . . . . . . . . . . . . 119
6 Conclusion 121
6.1 Measurement Uncertainty . . . . . . . . . . . . . . . . . . . . . . . . 121
6.2 Future System Improvements . . . . . . . . . . . . . . . . . . . . . . 125
6.3 Final Remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128

ix
Bibliography 131
A Simulating Periodic Nonlinearity 137

x
List of Figures
1.1 Renishaw’s ML10 optical interferometer measuring yaw . . . . . . . . 2
1.2 Abbe error is amplified at the measurement point of interest . . . . . 4
1.3 Wafer stage metrology in optical lithography . . . . . . . . . . . . . . 5
1.4 The homodyne Michelson interferometer . . . . . . . . . . . . . . . . 7
1.5 Homodyne interferometry signal processing . . . . . . . . . . . . . . . 8
1.6 The heterodyne Michelson interferometer . . . . . . . . . . . . . . . . 10
1.7 Homodyne interferometer measuring strain propogation through 1060
aluminum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.8 Measuring the refractive index of air and laser stability . . . . . . . . 16
1.9 Beam leakage in the heterodyne Michelson interferometer . . . . . . . 18
1.10 Generation of a split frequency using acousto-optic modulators . . . . 20
1.11 Spatially separated beams in a Joo-type interferometer . . . . . . . . 21
2.1 A typical effect of periodic nonlinearity . . . . . . . . . . . . . . . . . 24
2.2 Full schematic of the multi-DOF interferometer . . . . . . . . . . . . 25
2.3 Sources of periodic nonlinearity as a result of Zeeman splitting . . . . 26

xi
2.4 Creation of a split frequency using acousto-optic modulators . . . . . 27
2.5 Propagating misalignment through a free space optical metrology system 30
2.6 Transition from a free space interferometry system to a fiber-coupled
setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.7 Close-up schematic of the multi-DOF interferometer . . . . . . . . . . 32
2.8 Phase differences on a quadrant photodetector . . . . . . . . . . . . . 34
2.9 Linear ramp with error in open loop . . . . . . . . . . . . . . . . . . . 36
2.10 Noise floor at constant voltage . . . . . . . . . . . . . . . . . . . . . . 37
2.11 Pitch and yaw sensitivity in open-loop scanning . . . . . . . . . . . . 38
2.12 Random step test for measurement reproducibility . . . . . . . . . . . 39
2.13 Increasing the split frequency to accommodate higher doppler shifts . 40
3.1 Kelvin clamp schematics . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.2 Thermal drift with the benchtop interferometer . . . . . . . . . . . . 45
3.3 First and second design iterations of the interferometer . . . . . . . . 46
3.4 Geometrical optical analysis on interferometer beam paths . . . . . . 48
3.5 Optimized beam spacing for the interferometer . . . . . . . . . . . . . 49
3.6 First design iteration schematic . . . . . . . . . . . . . . . . . . . . . 50
3.7 First design iteration Solidworks assembly . . . . . . . . . . . . . . . 51
3.8 Fold mirror kinematic mounts on the first design iteration . . . . . . 52
3.9 Close-up of the fold mirror kinematic mounts . . . . . . . . . . . . . . 53
3.10 The critical face on the first design iteration . . . . . . . . . . . . . . 54
3.11 Critical face subassembly . . . . . . . . . . . . . . . . . . . . . . . . . 55

xii
3.12 Kinematically mounted beamplitters on the first design iteration . . . 56
3.13 Kinematically mounted beamsplitter close-up . . . . . . . . . . . . . 57
3.14 Invar optical mount with critical faces . . . . . . . . . . . . . . . . . 58
3.15 Baseplate designated on the first design iteration . . . . . . . . . . . 60
3.16 Baseplate close-up on the first design iteration . . . . . . . . . . . . . 60
3.17 From concept to reality in the second design iteration . . . . . . . . . 61
3.18 Second design iteration Solidworks assembly . . . . . . . . . . . . . . 62
3.19 Fiber collimator kinematic mounts designated on the second design
iteration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.20 Fiber collimator kinematic mounts close-up . . . . . . . . . . . . . . . 64
3.21 Fiber collimator squeeze clamps designated on the second design
iteration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.22 Von Mises stress analysis on the fiber collimator squeeze clamps . . . 66
3.23 Optical support structure designated on the second design iteration . 67
3.24 Stress analysis on the Invar optical support structure . . . . . . . . . 68
3.25 Stainless steel base designated on the second design iteration . . . . . 69
3.26 Kinematically mounted optical support structure . . . . . . . . . . . 70
3.27 Base support structure of the interferometer and selected features . . 71
3.28 Monitoring interference as the working prototype assembly cures
under a UV source . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.29 The final assembled prototype of the multi-DOF interferometer . . . 73
4.1 Qualifying the interferometer against the Renishaw ML10 . . . . . . . 76

xiii
4.2 Initial scaling factor of 2.15 in yaw qualification . . . . . . . . . . . . 77
4.3 Azimuthal misalignment decreases scaling factor in yaw . . . . . . . . 78
4.4 Further azimuthal misalignment continues to decrease scaling factor
in yaw . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.5 Final azimuthal misalignment increases scaling factor in yaw . . . . . 79
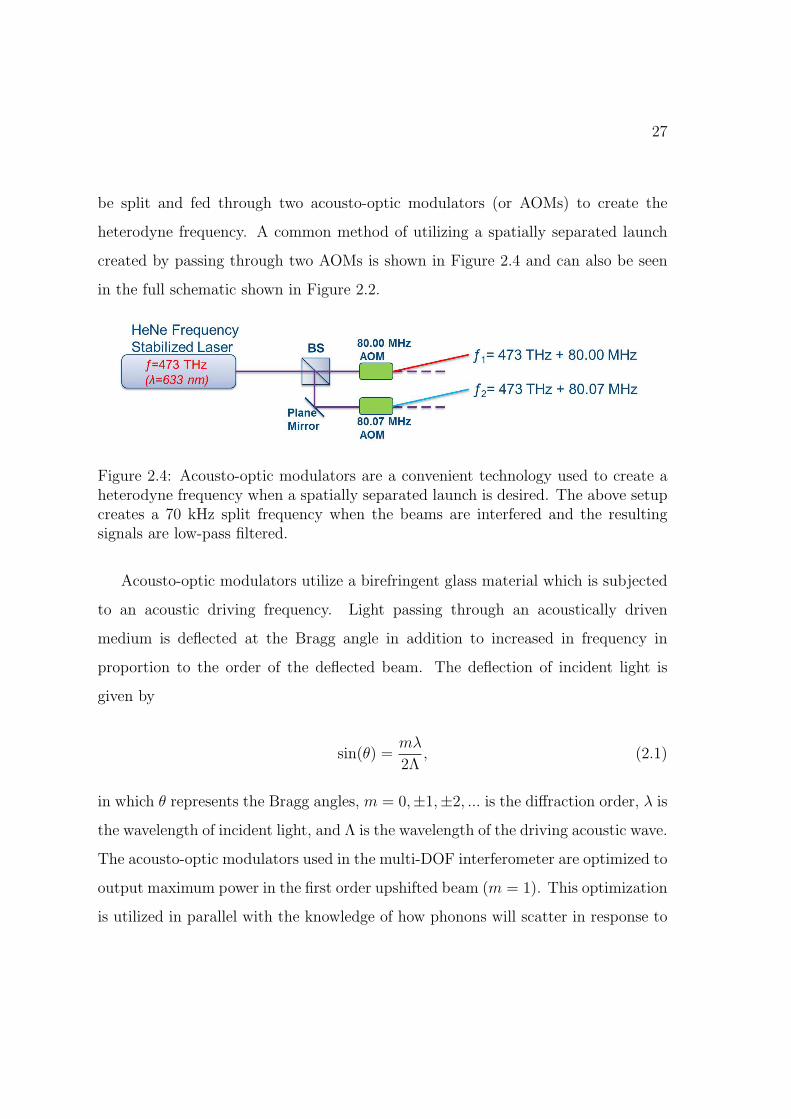
4.6 Initial scaling factor in pitch qualification . . . . . . . . . . . . . . . . 80
4.7 Change in pitch scaling factor as a result of azimuthal misalignment . 81
4.8 Scaling factor of 2.10 with pitch and yaw combined and summed in
quadrature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
4.9 Scaling factor varies with pitch and yaw combined and summed in
quadrature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.10 Scaling factor is sometimes below one with pitch and yaw combined
and summed in quadrature . . . . . . . . . . . . . . . . . . . . . . . . 83
4.11 Qualification agreement for small displacements . . . . . . . . . . . . 84
4.12 Z-displacement qualification for a linear ramp . . . . . . . . . . . . . 85
4.13 Z-displacement qualification for a sine wave . . . . . . . . . . . . . . 85
4.14 Cosine error schematic . . . . . . . . . . . . . . . . . . . . . . . . . . 86
4.15 Consistent scaling factor using one focusing lens in yaw . . . . . . . . 88
4.16 Scaling factor is not affected by misalignment using one focusing lens,
qualifying yaw . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
4.17 Scaling factor is not affected by further misalignment using one
focusing lens, qualifying yaw . . . . . . . . . . . . . . . . . . . . . . . 89
4.18 Scaling factor is valid for sine inputs, qualifying yaw . . . . . . . . . . 89

xiv
4.19 Consistent scaling factor still evident in pitch qualification, using one
focusing lens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.20 Consistent scaling factor is evident in pitch qualification when
misaligned, using one focusing lens . . . . . . . . . . . . . . . . . . . 90
4.21 Consistent scaling factor is evident in pitch qualification for sine input,
using one focusing lens . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.22 Variable location of quadrant photodetector changes scaling . . . . . 92
4.23 Further variable scaling with variable quadrant photodetector location 93
4.24 No scaling factor using a telescope to focus measurement beam . . . . 93
4.25 Telescope scaling factor in pitch . . . . . . . . . . . . . . . . . . . . . 94
4.26 Large scaling factor using telescope in yaw qualification . . . . . . . . 94
4.27 Qualification measurement setup of the working multi-DOF prototype
vs. the Renishaw ML10 . . . . . . . . . . . . . . . . . . . . . . . . . 96
4.28 45 mm linear ramp qualification between the Renishaw ML10 and the
working prototype of the multi-DOF interferometer . . . . . . . . . . 97
4.29 Scaling factor persisted in rotation measurements with the multi-DOF
interferometer working prototype . . . . . . . . . . . . . . . . . . . . 98
4.30 Overfilling detector drastically reduces tip/tilt sensitivity . . . . . . . 99
4.31 Preliminary analytical simulations of the multi-DOF interferometer
naturally produce the scaling factor required for agreement between
the Renishaw ML10 and the multi-DOF system . . . . . . . . . . . . 101
5.1 Typical effect of periodic nonlinearity on a linear ramp . . . . . . . . 104
5.2 Michelson heterodyne interferometer . . . . . . . . . . . . . . . . . . 105

xv
5.3 Michelson interferometer showing optical mixing . . . . . . . . . . . . 106
5.4 Phasor diagram representations of periodic nonlinearity . . . . . . . . 111
5.5 Optical misalignment experiment to examine resulting periodic
nonlinearity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
5.6 Effect of slight misalignment on the multi-DOF interferometer . . . . 113
5.7 Linear polarizers to limit periodic nonlinearity . . . . . . . . . . . . . 114
5.8 Periodic nonlinearity still exists with polarizer implemented . . . . . 114
5.9 Periodic nonlinearity in a meticulously aligned system . . . . . . . . . 116
5.10 Nonlinearity in all four quadrants of the quadrant photodiode . . . . 116
5.11 Sub-microradian nonlinearity in rotation and sub-nanometer nonlin-
earity in Z-displacement . . . . . . . . . . . . . . . . . . . . . . . . . 117
5.12 Periodic nonlinearity exists using wedge beamsplitters to scatter ghost
reflections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
6.1 Periodic nonlinearity amplified using measurement fiber detection . . 126
6.2 Attempted pitch qualification using measurement fiber detection . . . 127
6.3 Multi-DOF interferometer as a fiber probe on a 5-axis CMM . . . . . 128
A.1 Screen shot of the multi-DOF interferometer modeled using FRED
optical software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
A.2 Schematic of initial multi-DOF interferometer used in the FRED
simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
A.3 Control scenario irradiance output . . . . . . . . . . . . . . . . . . . . 139
A.4 FRED simulation schematic to observe amplitude of ghost reflections 140

xvi
A.5 Irradiance output as a result of ghost reflections . . . . . . . . . . . . 141
A.6 Periodic nonlinearity simulation resulting from ghost reflections . . . 142

1
1 Introduction
Heterodyne displacement interferometry is a widely accepted method used for high
resolution stage metrology [1–3]. Optical heterodyne interferometers are typically
capable of measurements with sub-nanometer resolution and uncertainty, that is, if
the proper precautions are taken to ensure a confined environment and if a sufficiently
frequency stabilized source is used [4]. Although the interferometer which will be
discussed throughout this thesis utilizes a laser source, interferometry itself does not
necessarily imply the interference of optical signals. In general, interferometry simply
denotes the concept of interference, which may also involve radio waves [5].
The subject of this thesis is a novel fiber-coupled interferometer that is capable
of monitoring three degrees of freedom – displacement and changes in pitch and
yaw – of a moving stage using a single beam incident on a small plane mirror target.
Other displacement interferometers capable of measuring multiple degrees of freedom
simultaneously include the system developed for use in the Laser Interferometer
Space Antenna (LISA) [6], the 6-degree of freedom optical sensor for machine
tool error characterization [7] and the multi-degree of freedom measuring system
developed specifically for coordinate measurement machine error calibrations [8].

2
The interferometer discussed throughout this thesis was developed with a similar
design to that used in the LISA project, but has been condensed to a compact size
using, in part, architectures developed by Joo and colleagues [9–11].
Commercial interferometers are only capable of monitoring one or at most two
degrees of freedom during a single measurement, and in doing so they typically utilize
multiple retroreflectors. Renishaw’s ML10 interferometer is capable of measuring
Z-displacement, changes in pitch and yaw, squareness and straightness, however,
only one of these calibrations can be recorded during a single measurement. If any
other degree of freedom is desired, the retroreflectors must be detached from the
measurement stage and reattached in a different configuration. The Renishaw ML10
utilizes the setup shown in Figure 1.1 to record yaw measurements.
Figure 1.1: Renishaw’s ML10 optical interferometry system uses multipleretroreflectors to create a differential yaw measurement. The retroreflectors arerelatively bulky on small micro-positioning stages and must be reconfigured if otherdegrees of freedom are to be measured.
The interferometer that is the subject of this thesis, which will be called the
multi degree-of-freedom interferometer (or multi-DOF interferometer), utilizes a
much smaller profile on a measurement surface than a commercial system such

3
as Renishaw’s. The beam diameter that was used in the research conducted for
this thesis was nominally 3 mm. Therefore, two immediate improvements over
commercial systems are evident: The ability to monitor three degrees of freedom
simultaneously and the ability to do so by attaching a relatively small mirror to the
measurement surface.
1.1 Applications
There are a wide variety of applications for multi-DOF interferometers. Two
representative examples include the calibration of micro-positioning stages and the
metrology of wafer stages in the optical lithography industry. The calibration of
micro-positioning stages is subject to a phenomenon known as Abbe error. As
these small stages are calibrated in the Z-direction, the measurements must not
only include Z-displacements, but the inevitable nanoscale and sometimes microscale
pitch and yaw errors the stages exhibit while displacing. The rotational positioning
errors are unavoidable due to error sources such as manufacturing tolerances.
Abbe error specifically refers to small inevitable errors that are amplified at the
measurement point of interest through the moment arm that connects measurement
axis to the point of interest. The retroreflector setups which commercial systems
require for rotational calibrations are very bulky which hinders the possibility of
direct measurement at the point of interest. Instead, calibrations are typically
recorded off-axis and run through a transformation matrix from the measurement
site. This method of indirect measurement tends to decrease the accuracy of a
calibration because information is inevitably lost or skewed when passed through
a transformation matrix. Additionally, the mass of the interferometer target

4
distorts the dynamic performance of the stage, leading to less accurate calibrations.
The multi-DOF interferometer has the capability of monitoring displacements and
rotations directly at the point of interest due to its small beam profile and
thus, less information is lost in translation from an off-axis calibration point.
Figure 1.2 demonstrates the capability of the interferometer to measure directly
at the measurement point of interest using a small beam profile.
Figure 1.2: Abbe error is produced when measurements are taken off-axis from themeasurement point of interest. The multi-DOF interferometer has the capability ofmeasuring directly at the measurement point of interest due to its relatively smallbeam profile on the measurement mirror.
The second previously mentioned application of the multi-DOF interferometer
is in the metrology of wafer stages in the optical lithography industry. As a wafer
stage translates during lithographic printing, again, it inevitably exhibits not only
translation motions, but undesirable rotational errors which must be addressed. To
do so, at least six interferometers must constantly track the translating wafer stage
to account for all six degrees of freedom. The undesirable motions of the stage
are incorporated into feedback control to correct the errors in real time. Refer to

5
Figure 1.3: The metrology of wafer stages in the optical lithography industry requiresat least six interferometers to monitor all six degrees of freedom.
Figure 1.3 for a full schematic of the metrology involved in monitoring all six degrees
of freedom of a lithography stage.
A multi-DOF interferometer could simplify many metrology aspects in the
lithography industry. The full metrology package would be reduced to three
interferometers (three with redundancy for rotation self-calibration) while still
monitoring all six degrees of freedom. Currently the optical lithography industry
is pushing wafer sizes to over 450 mm, but with larger wafers comes larger – and
heavier – wafer stages. A smaller beam profile on the stage mirror would allow for
wafer stages to be made as small as possible to reduce weight, which would thus
increase printing efficiency.

6
Metrology systems will be further simplified if the multi-DOF interferometer is
fiber-coupled, which was a large research focus of this thesis as well. Not only will
the number of interferometers be reduced to three, the alignment required for the
entire system would be greatly reduced with the implementation of fiber-coupling.
Metrology systems in the lithography industry are mostly free-space delivered, so
a misalignment early in the system propagates downstream to every component
after it. The free-space delivery means that each interferometers’ alignment is
coupled to each other, leading to a more complex metrology system. Fiber-coupled
interferometers do not suffer from this drawback. A misalignment before the signals
are launched into fibers does not affect the alignment of each individual interferometer
downstream. Also, a misalignment in one fiber-coupled interferometer can be
corrected for independently from the others because each interferometer would be
individually coupled to the laser source. These concepts will be discussed in detail
in Chapter 2. To continue with the introduction into the field of displacement
interferometry, an overview of the measurement theory will be discussed followed
by a background discussion containing a number of selected historical advances.
1.2 Displacement Interferometry Theory
Displacement interferometers fall into one of two categories – homodyne and
heterodyne. These two categories describe the operating principle of the
interferometer, namely amplitude modulation or frequency modulation, respectively.
The concepts of homodyne and heterodyne signal transmission are not unique to
optics, they are both used in the transmission of radio waves. AM radio (or amplitude
modulated) uses the same working principles as a homodyne interferometer and FM

7
radio (or frequency modulated) obeys the same principles of a heterodyne optical
metrology system. Furthermore, AM radio signals are considered noisy compared to
FM radio signals for the same reasons that frequency modulated interferometers
possess superior signal integrity to amplitude modulated interferometers. The
working principles behind each type of interferometer will be discussed next.
1.2.1 The Homodyne Interferometer
The homodyne interferometer relies on a change in overall signal amplitude, from
varying effects of interference, as a measurement signal phase shifts with respect to a
reference signal. The term homodyne describes the use of a single optical frequency
which is divided into a reference and measurement path. A Michelson interferometer
is a simple way to describe both a heterodyne and homodyne system, and one such
Michelson homodyne example can be seen in Figure 1.4.
Figure 1.4: The homodyne interferometer utilizes a single optical frequency to trackdeviations in amplitude. Changes in the optical path length in the measurement armyields varying interference based on retroreflector 2 displacements. (PD-photodiode,BS-beamsplitter, RR-retroreflector)
As RR2 translates towards or away from the beamsplitter, the measurement

8
and reference signals constructively or destructively interfere, resulting in varying
AC signal amplitudes at the photodiode. Before the signals are recorded, they are
passed through a rectifier which essentially takes the absolute value of recorded
AC measurements and then they are passed through a low-pass filter to create a
simple DC output based on the interference between reference and measurement
signals. The varying levels of interference depending on the relative phase between
measurement and reference signals in a homodyne interferometer can be seen in
Figure 1.5.
Figure 1.5: AC signals in the homodyne interferometer are passed through a rectifierto essentially take the absolute value and then passed through a low-pass filter tocreate a simple DC output which is directly proportional to stage displacement.
One drawback of the homodyne interferometer compared to a heterodyne system
is that it is direction insensitive. In reference to Figure 1.5, the interference signal
in the second row registers as the same output as the interference signal in the

9
fourth row, even though the measurement phase (dotted red) has continued to shift
in the same direction relative to the reference phase. Unfortunately, one does not
know whether the measurement phase has switched directions between the third and
fourth rows or continued to shift in the same direction. Another drawback is the
homodyne interferometer’s sensitivity to spurious fluctuations in amplitude from the
laser source. Fluctuations such as this can be filtered out in a heterodyne system
which does not depend on an amplitude modulation for accurate measurements.
1.2.2 The Heterodyne Interferometer
The heterodyne interferometer is a natural progression from its homodyne
counterpart towards higher resolution measurements. Heterodyning is a method
which is based on the interference of two beams with slightly different frequencies
and the result of this interference is called the split frequency (or beat frequency).
Through signal processing, the interference between beams of slightly different optical
frequencies results in the difference between the two interfering frequencies. Before
interference, the two beams are fed through the reference and measurement arms
of a heterodyne interferometer where a modulation in phase in the measurement
arm can be discerned with respect to the reference path. To once again relate back
to the FM radio wave analogy, the irradiance recorded at the reference photodiode
creates the equivalent of a local oscillator while the measurement beam interfering
with the slightly different frequency from the reference path carries the actual signal
of interest. Polarizations are typically employed in these interferometers to ensure
that signals do not interfere until it is desired. A standard heterodyne Michelson
interferometer schematic can be seen in Figure 1.6.
In the schematic, two collinear and orthogonally polarized beams are supplied

10
Figure 1.6: The heterodyne Michelson interferometer outputs two collinear andorthogonally polarized beams which are separated through a polarizing beamsplitterinto the measurement and reference paths of the interferometer. (PBS-polarizingbeamsplitter, PD-photodiode, RR-retroreflector)
from the laser source at slightly different frequencies. About 10% of the beams
are immediately separated using a beamsplitter and passed through a 45 polarizer
to create reference interference. The remaining 90% of the beams are fed into
the interferometer where they are split by a polarizing beamsplitter into the
reference and measurement arms of the interferometer. At this point the polarizing
beamsplitter has split polarizations, and thus each frequency, into the reference
and measurement paths. The measurement path is subjected to a translating
retroreflector displacement which creates a change in optical path length, but
more importantly, a Doppler shift corresponding to a retroreflector that is moving
towards or away from the interferometer. The Doppler shifted light manifests as a
frequency modulation relative to the reference signal taken before the interferometer
and is detected as a directionally sensitive displacement. The resulting frequency
modulation is related to the physical displacement of the moving retroreflector

11
through
∆φ = φ2 − φ1 =2πNη∆z
λ, (1.1)
where φ2 represents the change in phase seen in the measurement arm of the
interferometer, φ1 represents the phase reading at the reference photodetector, N
is the interferometer fold factor (2 in the case of Figure 1.6) which corresponds to
the number of passes to and from the measurement target, η is the refractive index of
the surrounding medium, ∆z is the change in physical displacement of the target, and
λ is the wavelength of light (632.8 nm in the case of the lasers used for this research).
The interference of two electric fields with different frequencies is represented as the
superposition of the two:
E = E1 + E2 = E01e−i(ω1t+φ1) + E02e
−i(ω2t+φ2), (1.2)
where E01 and E02 represent the amplitude values of the two signals, ω1,2 designates
the two heterodyne angular frequencies that vary with time, t, and φ1,2 designates the
phase shifts in the reference and measurement arm of the interferometer, respectively.
The detected irradiance is proportional to the square of the amplitude given in
Equation 1.2 and is given by
I ∝ |E|2 = |E01e−i(ω1t+φ1) + E02e
−i(ω2t+φ2)|2
= (E01e−i(ω1t+φ1) + E02e
−i(ω2t+φ2))(E∗
01ei(ω1t+φ1) + E∗
02ei(ω2t+φ2)
= |E01|2 + |E02|
2 + 2<(E01E∗
02e−i(∆ωt+∆φ))
= I1 + I2 + 2√
I1I2 cos(∆ωt+∆φ),
(1.3)
where, ∆ω represents the angular split frequency, ω1 − ω2, and an asterisk denotes

12
a complex conjugate. It should also be noted that Equation 1.3 designates a change
in phase, φ1,2 in each of the interfering electric fields. While this may be true for the
measurement signal, it is assumed that there is no change in phase in the reference
signal of a heterodyne interferometer. With this in mind, it is convenient to represent
the reference and measurement irradiance readings as simplified proportionality
terms, given by
PDr → Ir ∝ Ar cos[2π(f1 − f2)t] (1.4)
PDm → Im ∝ Am cos[2π(f1 − f2)t+∆φ], (1.5)
where angular frequency has been converted to temporal frequency and amplitude
terms have been simplified to Ar and Am. In the above equations, the subscript r
denotes the reference measurement and the subscript m denotes the measurement
signal. The measurement signal is subjected to a frequency modulation or change in
phase, ∆φ, in response to a moving target mirror.
The transition from a phase modulation to physical displacement is not easily
evident yet. The signal processing which takes place after the measurement and
reference signal are recorded is what yields a simple time varying phase measurement
with respect to the reference signal. From Equations 1.4 and 1.5, in-phase and
quadrature signals are generated to represent the detected modulation as a sine and
cosine component. The in-phase measurement is created by multiplying the reference
irradiance by the measurement irradiance. Similarly, the quadrature signal is created
by multiplying the sine of the reference signal (simply the cosine term with a 90
phase shift) by the measurement signal. The in-phase, I, and quadrature, Q, signals
are represented by

13
I = RcM = cos(2πfst) cos(2πfst+∆φ)
Q = RsM = cos(
2πfst+π
2
)
cos(2πfst+∆φ),(1.6)
where fs is the split frequency, f1 − f2, Rc is the cosine component of the reference
signal, Rs is the sine component of the reference signal, M is the measurement signal
and ∆φ is the change in phase due to target mirror displacement. The terms in
Equation 1.6 can be manipulated using the common trigonometric identity,
2 cosA cosB = cos(A+B) + cos(A− B). (1.7)
When Equation 1.6 is manipulated using Equation 1.7, two terms are created, a
high frequency term, cos(A + B), with a frequency value too high to detect and a
lower frequency term, cos(A−B), which has evolved into the simple in-phase, I, and
quadrature, Q, terms in Equation 1.8.
I =1
2cos(∆φ)
Q =1
2sin(∆φ)
(1.8)
Phase is thus determined from the arctangent of the in-phase and quadrature terms,
∆φ = arctan(Q
I
)
, (1.9)
and converted to physical displacement using Equation 1.1. With these working
principles in mind, the development of the displacement interferometry industry
may now be examined.

14
1.3 Displacement Interferometry Background
Optical interferometry was first used to measure displacements in 1892 when the
standard meter was defined by Albert Michelson and Rene Benoit at the International
Bureau of Weights and Measures (BIPM) in France [12]. It would not be until the
invention of the Helium-Neon gas laser in 1960 that the displacement interferometry
industry would truly take off. Not long after this invention, one of the first
displacement interferometers was created in 1965 by Barker, et al. [13]. Barker’s
research team at Sandia National Laboratories was attempting to measure the strain
propagation through aluminum after an applied impact. They eventually did so
by using a homodyne displacement interferometer from which they achieved an
accuracy of 0.025 µm at free surface velocities up to 0.1 mm/µs. The resolution
of this interferometer was at least one order of magnitude better than other methods
they had attempted to use to measure strain propagation. As discussed in the
previous section, homodyne interferometry systems are limited. Barker and his team
discussed the problems they ran into which included the need for a high frequency
photodetector and recording system as well as a collimated, low-noise laser source.
These laser sources are much more readily available today than they would have been
a mere five years after the He-Ne gas laser was invented. The setup used by Barker,
et al. is shown in Figure 1.7.
In Figure 1.7, the entire interferometer is housed within a vacuum chamber to
mitigate environmental effects on refractive index. Under an applied impact small
strain effects propagate through a sample of 1060 aluminum and can be detected
on the opposite surface from the applied force. The homodyne laser source is split
50/50 at the non-polarizing beamsplitter (BS) into the measurement and reference
arm of the interferometer. Strain propagations produce small local displacements

15
Figure 1.7: The Homodyne interferometer system used by Barker, et al. to measuresub-micrometer level effects of strain propagation (adapted from Reference [13]).(PD-photodiode, BS-beamsplitter)
in the surface which manifest as small changes in phase in the measurement arm
of the interferometer. Changes in interference, and thus phase, are detected at the
measurement photodiode (PDm). Even though this interferometer was limited, its
creators still realized the need to stabilize the environment to mitigate uncertainty
as a result of changes in refractive index.
The year after Barker, et al. published their work, a more precise determination
of the refractive index of air was published by Edlen [14]. This uncertainty source
and its effect on displacement measuring interferometry was heavily investigated
by Estler in 1985 [4]. Estler’s paper discusses that the two dominant uncertainty
sources in laser interferometers are the laser stability and the refractive index of air.

16
He tested these two sources of uncertainty with the setup shown in Figure 1.8.
Figure 1.8: The setup used by Estler to investigate the refractive index of air andlaser stability in relation to their effects on displacement measuring interferometers(Adapted from Reference [4]). (PD-photodiode, PBS-polarizing beam splitter, QWP-quarter-wave plate)
The setup shown in Figure 1.8 is a plane mirror interferometer which is insensitive
to small tip and tilt rotations of the measurement mirror. Estler monitored laser
stability by creating a beat frequency between a reference Iodine-stabilized He-Ne
laser source and a commercial Zeeman split HP laser. He determined that the short-
term frequency stability of the HP laser was about ±2 parts in 109, which was better
than the absolute uncertainty that he eventually deduced from changes in refractive
index.
To accurately determine the refractive index of air, pressure, temperature,
humidity, and CO2 concentration of the surrounding environment must be monitored.
CO2 concentration was deemed completely negligible for the system in Figure 1.8
and was not measured. Humidity and pressure were monitored with a pressure
and humidity sensor placed before the beamsplitting optics. Temperature effects

17
were monitored using a thermistor array that spanned the measurement arm of the
interferometer which allowed for the observation of temperature gradients. In the
end, the uncertainty in refractive index due to pressure variations was calculated to
be ±2 parts in 108. The uncertainty in refractive index as a result of temperature
variation was ±1 part in 108, and humidity effects contributed ±0.5 parts in 108
to the overall refractive index uncertainty [4]. As a result of these sources, Estler
calculated an absolute uncertainty in refractive index of ±8.5 parts in 108. These
results show that although laser stability is important to consider for a heterodyne
system, a stable refractive index is slightly more so due to its higher contribution
to the uncertainty of measurement (that is, if a sufficiently stable laser is available
to use). Uncertainties from other error sources would continue to be investigated
through the 1980s.
The uncertainty of displacement interferometer measurements continued to
improve in 1987 when Norman Bobroff investigated residual errors as a result
of air turbulence and imperfect optics [15]. As discussed previously, one of the
main applications of displacement interferometry is in the metrology of lithography
stages. Frequently in lithographic printing, a turbulent air flow is introduced in
an effort to reduce contaminants which could affect the resolution of the print.
Turbulent airflow is not something that was investigated towards the completion
of this thesis, and therefore, the results of Bobroff’s air turbulence experiments
will not be discussed in detail. His more applicable error sources which will be
discussed are the periodic nonlinearities created as a result of frequency mixing at
the launch site, in addition to the beam leakage within an interferometer that occurs
as a result of imperfect beamsplitting optics. This periodic error source was first
observed by Quenelle [16] and later experimentally demonstrated by Sutton [17].

18
Periodic nonlinearity is typically a 1-5 nm sinusoid which is superimposed on top of
a nominal signal [17–19]. The phenomenon is discussed in detail in Chapter 5, but
for now, it is simplest to understand periodic nonlinearity as a 1-5 nm error source
for a given measurement. If the standard Michelson interferometer from Figure 1.6
is considered, ideally the launch site produces two collinear perfectly orthogonally
polarized beams. However, in reality, this is never the case. Polarizations of the two
beams are never orthogonal, and the result is the two beams tend to interfere before
entering the interferometer. Interference at the launch site creates frequency mixing
and a non-ideal fringe contrast. In addition, beamsplitting optics are never perfect
which results in a phenomenon known as beam leakage and therefore, additional
periodic nonlinearities [20, 21]. Techniques to minimize the effects of these error
sources will be discussed in Chapter 5 along with the implementation of these
techniques.
Figure 1.9: Visualization of beam leakage which is a result of imperfect beamsplittingoptics. This effect is a source of periodic nonlinearity which will be discussed inChapter 5. (PD-photodiode, PBS-polarizing beam splitter, RR-retroreflector)
Beam leakage can be visualized using the Michelson interferometer shown in
Figure 1.9. In this schematic, ideally the polarizing beamsplitter (PBS) splits one
polarization state and thus one frequency into the reference arm of the interferometer

19
while letting the perpendicularly polarized beam pass into the measurement arm.
Optical coatings are never perfect, so as a result, an unwanted portion of the f1
beam leaks into the measurement arm and a portion of the f2 beam leaks into the
reference arm. The resulting periodic nonlinearity creates measurement error.
Another considerable limitation in the previously discussed Michelson laser
interferometer is the megahertz-range split frequency which is frequently generated
using Zeeman splitting. In order to measure faster moving stages, the split frequency
must be increased in order to be able to discern a high frequency Doppler shift. As
the split frequency moves into the megahertz range, signal integrity becomes more
of an issue for data processing (i.e.: signal cross talk, ground bounce, and signal
distortion). In addition, a megahertz range split frequency is often not a viable option
to use with benchtop interferometer setups. The benchtop interferometer setups used
for this research utilize a commercial lock-in amplifier (Stanford Research Systems:
SRS-830) to lock to a reference frequency measured at the reference photodetector.
These lock-in amplifiers cannot lock to a signal greater than 100 kHz, making a
megahertz-range split frequency unrealistic to use for this research. In 1989, Tanaka,
et al. utilized acousto-optic modulators to generate a tunable split frequency [22],
and as a result, simplified data analysis. A schematic of acousto-optic modulators
(AOMs) are shown in Figure 1.10.
The diagram in Figure 1.10 utilizes a standard He-Ne frequency stabilized laser
which is split through a non-polarizing beamsplitter and fed into two AOMs. The
effect of the AOMs is they both increase the 473 THz input frequency by around
80 MHz. The top AOM in Figure 1.10 increases the frequency by 80.00 MHz while
the bottom AOM increases the input frequency by 80.07 MHz. If these two signals are
used as the heterodyne source for a displacement interferometer, the split frequency

20
Figure 1.10: Acousto-optic modulators (AOMs) are capable of creating a kHz rangesplit frequency. The split frequency is also tunable if one AOM is switched out foran AOM at a higher driving frequency. (BS-50/50 beamsplitter)
(f2 − f1) is 70 kHz and the SRS-830 commercial lock-in amplifier can now be used
for data processing. In 2000, Lawall and Kessler utilized acousto-optic modulators
in a displacement interferometer setup and achieved an accuracy on the order of
10 pm [23]. They attribute a large portion of this accuracy to a much lower residual
periodic error than was seen with a Zeeman split laser.
The use of acousto-optic modulators eliminates periodic nonlinearity as a result
of frequency mixing at the launch site. Periodic error can be further minimized by
spatially separating the launch beams into the interferometer which was successfully
demonstrated by Joo, et al. in 2009 [10]. Spatial separation of launch beams
minimizes the other source of periodic nonlinearity shown in Figure 1.9, beam
leakage. Joo, et al. minimized periodic error to less than 0.15 nm using the set up
shown in Figure 1.11. In this figure, the f1 and f2 beams both enter the interferometer
and are split 50/50 through a non-polarizing beamsplitter into the reference and
measurement arms of the interferometer. Both beams in the measurement arm reflect
off a retroreflector (RR) and head back into the non-polarizing beamsplitter where
they are reflected once more and interfere with the beams from the reference arm.
Another interesting attribute of this Joo-type interferometer is that optical

21
Figure 1.11: Spatially separated beams utilized by Joo, et al. to minimize periodicerror to less than 0.15 nm (adapted from Reference [10]). (RR-retroreflector, NPBS-non-polarizing beam splitter)
resolution was also increased by a factor of two. This is because one photodetector
(PD1 for example) sees a phase shift in one direction as a result of the measurement
retroreflector displacement. The other photodetector (PD2 in this case) sees a phase
shift in the exact opposite direction as seen on PD1, effectively increasing optical
resolution by a factor of two.
1.4 Towards a Multi-DOF Interferometer
The overview of heterodyne measurement theory along with a discussion of the
evolution of the field have provided a foundation for developing a multi-degree of
freedom interferometer. Numerous technological advances were introduced in the
preceeding sections which will be elaborated on in coming chapters. Chapter 2 will

22
provide an overview of the full working principles behind the custom multi-DOF
interferometer. Preliminary testing results will also be presented along with the
working principles. Chapter 3 presents the foundation of why this work is grounded
in mechanical engineering and provides explanations for precision engineering design
decisions. The precision design of the interferometer was run through two complete
iterations before arriving at a satisfactory assembly; both designs will be explored.
Renishaw’s ML10 interferometric system was briefly mentioned at the beginning of
this introduction. This specific model was used as an example because measurements
from the ML10 are qualified against the multi-DOF interferometer in Chapter 4.
Chapter 5 delves into the depths of periodic nonlinearity and its sources, along
with how the phenomenon affected this research. Finally, the concluding chapter
will present a calculated uncertainty analysis for this interferometer in addition to
outlining future work.

23
2 Working Principles of the
Multi-DOF Interferometer
As the optical metrology industry continues to expand, more and more custom
interferometer configurations are being developed for project-specific applications.
Many of these configurations have been created in pursuit of the complete elimination
of periodic nonlinearity [9,10,24–26]. Periodic nonlinearity, its sources, and effects on
polarization encoded interferometers will be discussed in detail in Chapter 5; however,
it is necessary to introduce the topic to gain an understanding of the motivations for
the development of the multi-DOF interferometer.
Periodic nonlinearity is a consequence of using polarization encoded interfer-
ometers. Transitions between linear and circular polarizations are employed so
the interference of the reference and measurement signals of an interferometer can
be extended through multiple passes. Collinear, orthogonally polarized beams
ideally do not interfere. In practice however, polarizations are never perfect and
slight ellipticities in nominally linearly polarized light is one source of periodic
nonlinearity (PNL). Other sources which may contribute to the phenomenon include
optical misalignments, imperfect beamsplitting optics, ghost reflections, and the non-
orthogonality of nominally linear and orthogonally polarized beams. The effect of

24
PNL on a measurement is the superposition of an additional sinusoid on top of the
nominal signal, typically with an amplitude of 1 to 5 nanometers [17]. The effect can
be further visualized in Figure 5.1.
Figure 2.1: A typical effect of periodic nonlinearity on a measured linear ramp.Periodic nonlinearity typically results in 1-5 nm of error. Many of the technologiesin the multi-DOF interferometer have been implemented to avoid this result. Axesare displayed in terms of optical wavelength.
It is no accident that the majority of custom interferometer configurations are
being developed with the primary goal of decreasing the amplitude of periodic
nonlinearity. The three main error sources which limit displacement interferometry
systems are laser frequency stability [27], changes in refractive index in non-common
optical paths [4], and finally, periodic nonlinearity in the measured phase [16,19,28].
Commercial stabilized lasers can readily provide frequency stability on the order
of 1 part in 109 and refractive index can be measured up to 1 part in 108
(the limit of Edlen’s empirically derived refractive index equations). If refractive

25
index fluctuations can be appropriately controlled in a confined environment, the
limiting factor in high resolution measurements will be periodic nonlinearity; this is
particularly the case for measurements with small optical path differences. The multi-
DOF interferometer was designed with these error sources in mind and, in theory,
should be periodic error free. A full overview schematic is provided in Figure 2.2.
Figure 2.2: A full setup schematic of the multi-DOF interferometer.
Three critical technologies have been employed in Figure 2.2, each of which will
be discussed in succeeding sections. Acousto-optic modulators create a tunable
split frequency, the heterodyne signals are coupled into polarization-maintaining
fibers and eventually launched into the interferometer, and finally, interfering tilted
wavefronts are incident on a quadrant photodiode which has the ability to measure
Z-displacement simultaneously with changes in pitch and yaw of a moving stage.
2.1 Acousto-Optic Modulators
The first Michelson heterodyne interferometers utilized a collinear and orthogonally
linearly polarized source which was passed through a polarizing beamsplitter to
separate reference and measurement arms of the interferometer [29]. This technique

26
was soon thereafter adapted using a Zeeman split laser to create a collinear and
orthogonally polarized source which still utilized polarizing optics to create a
reference and measurement signal [30]. Limitations to this setup have since been
realized. In the quest for high-resolution measurements, one must remember that two
sources of periodic nonlinearity are ellipticities of nominally linearly polarized beams
and non-orthogonalities of nominally mutually orthogonal output states. Both error
sources inevitably exist in Zeeman split sources. Figure 2.3 provides a visualization
of this concept.
Figure 2.3: Common sources of periodic nonlinearity as a result of using a Zeemansplit laser. (a) ideal Zeeman split output (b) realistic output of Zeeman laser(exaggerated for clarity).
Instead of pursuing a better Zeeman split laser, a common solution to avoid PNL
as a result of these imperfect polarization states is to spatially separate the launch
into the interferometer. To create a spatial separation, a polarizing beamsplitter
can be used to separate frequencies from a Zeeman source, or a stabilized laser can
27
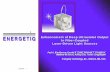
be split and fed through two acousto-optic modulators (or AOMs) to create the
heterodyne frequency. A common method of utilizing a spatially separated launch
created by passing through two AOMs is shown in Figure 2.4 and can also be seen
in the full schematic shown in Figure 2.2.
Figure 2.4: Acousto-optic modulators are a convenient technology used to create aheterodyne frequency when a spatially separated launch is desired. The above setupcreates a 70 kHz split frequency when the beams are interfered and the resultingsignals are low-pass filtered.
Acousto-optic modulators utilize a birefringent glass material which is subjected
to an acoustic driving frequency. Light passing through an acoustically driven
medium is deflected at the Bragg angle in addition to increased in frequency in
proportion to the order of the deflected beam. The deflection of incident light is
given by
sin(θ) =mλ
2Λ, (2.1)
in which θ represents the Bragg angles, m = 0,±1,±2, ... is the diffraction order, λ is
the wavelength of incident light, and Λ is the wavelength of the driving acoustic wave.
The acousto-optic modulators used in the multi-DOF interferometer are optimized to
output maximum power in the first order upshifted beam (m = 1). This optimization
is utilized in parallel with the knowledge of how phonons will scatter in response to

28
the acoustic driving frequency. Light scattering into an angle of mθ represents the
interaction of m phonons whose energies are added to the scattered photons. The
change of frequency of incident light as it passes through an acousto-optic modulator
can be written as
∆f =mEphonon
h, (2.2)
where h is Planck’s constant and Ephonon is the phonon energy. It should be noted
that the upshifted frequency is dependent on the diffraction order, m, which can be
seen as a spatial separation of multiple outputs. In the case of m = 1, or the first-
order upshifted beam, the output from the AOM is the incident frequency of light
plus the acoustic driving frequency. Utilizing this concept in addition to two AOMs
driving at slightly different acoustic frequencies is what creates the split frequency in
the multi-DOF interferometer. We know that reference and measurement heterodyne
measurements follow
Ir ∝ Ar cos[2π(f1 − f2)t] and
Im ∝ Am cos[2π(f1 − f2)t+ φz],(2.3)
where Ar and Am are simplified amplitude terms, f1 and f2 are the two first-order
upshifted outputs from two AOMs driving at slightly different frequencies, t is time
and φz is the change in phase as a result of measurement target displacement.
When the reference and measurement signals interfere, Equation 2.3 shows that
the reference and measurement signal are proportional to the cosine of the difference
between the frequencies of the interfering beams. Furthermore, split frequencies are
easily tunable using AOMs. Faster moving stages create higher Doppler shifts which
must be discernible in relation to the heterodyne frequency, f1−f2. If higher Doppler
shifts must be measured, one AOM can simply be switched out for a replacement

29
which drives at a higher acoustic frequency, in turn, increasing the split frequency
of the interferometer. This places additional requirements on the interferometer
detection and signal processing electronics.
2.2 Fiber Optic Coupling
The second critical technology implemented in the multi-DOF interferometer is a
fiber-coupled launch. Fiber-coupled interferometers have a variety of advantages
over free space systems. First, the interferometer is decoupled from the laser,
a significant heat source. Dividing the full system into laser and interferometer
subsystems makes high accuracy measurements more robust. At the beginning of
this chapter it was mentioned that one of the three main error sources that limit
the accuracy of a displacement interferometry system is changes in refractive index.
With fiber-coupled interferometers, the interferometer itself can be isolated in an
environmental containment system and completely separated from the laser heat
source. Furthermore, for applications such as EUV lithography which must operate
in vacuum, fiber-coupled interferometers are ideal because fibers can be easily fed
into the vacuum chamber – as opposed to free space beams being fed through an
entry window.
The other main advantage of fiber-coupled interferometers is the ability to
quickly identify and rectify misalignments. Figure 2.5 demonstrates the effect of
a misalignment in a free-space optical metrology system propagating to all of the
interferometers downstream. The consequence of a propagating misalignment such as
this typically is that a technician must come out to the lithography site to completely
realign the system and all of its components.

30
Figure 2.5: The effect of a misalignment propagating through a free space opticalinterferometry system. (a) An aligned plane mirror system (b) The consequence ofthe denoted misalignment propagates to all interferometers.
Fiber-coupled interferometers, on the other hand, do not suffer from the same
drawback as demonstrated in Figure 2.5. A completely fiber-coupled optical
metrology system creates the ability to more quickly identify and correct individual
misalignments. To expand on this concept, a misalignment in a beamsplitter towards
the beginning of the light stream will not necessarily propagate to one or all of the
interferometers. Furthermore, a misalignment in one interferometer of a multi-DOF
metrology system can be independently isolated and realigned without touching
the rest of the aligned interferometers. The transition to a fiber-coupled optical
metrology system, along with the implementation of multi-DOF interferometers can
be visualized in Figure 2.6.
Also, an additional advantage exists for companies who choose to switch to a
fiber-coupled optical metrology system. The ability to more quickly identify and
rectify misalignments reduces downtime should a misalignment occur. Reduction of
downtime means more product output for the company.

31
Figure 2.6: The transition from a free space interferometry system to a fiber-coupledsetup. (a) Free space system monitoring all six degrees of freedom of a translatingwafer stage. (b) A fiber-coupled metrology system which can still monitor all sixdegrees of freedom. It should be noted that a misalignment in one interferometer canbe independently realigned without touching any of the other aligned interferometers.
Despite the advantages of fiber-coupled optical metrology systems, disadvantages
must be addressed as well. The primary disadvantage is the artificial Doppler shifts
created within the fibers as a result of mechanical and/or thermal stresses. Thermal
and mechanical perturbations manifest themselves as artificial readings if the proper
precautions are not taken in the design of the interferometer as well as in the phase
measurement circuitry. The multi-DOF interferometer utilizes an optical reference
so artificial Doppler shifts which occur in one of the fibers will cancel out at the
measurement and reference photodiodes. In Figure 2.2, these artificial Doppler shifts
are denoted by the θ1 and θ2 terms. Figure 2.7 shows a close-up of the actual
interferometer itself where the artificial signals created in one fiber, for example, will
eventually be read at the reference and measurement photodetectors. The same will
be true for the artificial readings in the other fiber which, again, is split and directed
to the reference and measurement photodetectors. As a result of this setup, no
artificial readings are created because unwanted frequency components will cancel.

32
Figure 2.7: A close-up schematic of the multi-DOF interferometer. Artificial dopplershifts in each fiber may not necessarily be the same; however, this is accounted for byusing an optical reference after the fibers. Since the same artificial signals are seen inthe interference of both beams at both reference and measurement photodetectors,the effects cancel out.

33
Other ways in which artificially created Doppler shifts within the fibers may lead
to errors exist. The SRS-830 lock-in amplifiers which are used to take readings with
the interferometer in this research have a maximum locking frequency of 100 kHz.
Most preliminary measurements were acquired using a 70 kHz split frequency, so if
an artificial frequency component of over 30 kHz is created, the lock-in amplifiers will
not lock and measurements would be disrupted. Furthermore, the phase detection
algorithm must be able to track a constantly moving reference signal. This can be
obtained using methods such as a phase-locked loop, which is a common method of
electronic signal processing for this type of measurement.
In summary, if the architecture of a fiber-coupled interferometer is designed such
that it is symmetric and utilizes an optical reference after the fibers, artificial Doppler
shifts will cancel in the signal processing. This is contingent on the interferometer also
being equipped with the proper phase detection electronics to be able to constantly
track a moving reference signal. Finally, the magnitude of the mechanically or
thermally induced artificial signals must be quantified to make sure that the locking
algorithm which is utilized in phase detection will not lose a lock on the reference
signal. Common perturbations have been extensively quantified by Richard C.G.
Smith, and have been deemed negligible for the low speed measurements that will
be presented at the end of this chapter [31].
2.3 Differential Wavefront Sensing
The technique of Differential Wavefront Sensing (or DWS) was originally proposed
by Morrison, et al. in 1994 for use in the alignment of optical interferometers [32].
The technique has since been experimentally qualified by Muller, et al. in the sub-

34
Rayleigh alignment of laser beams [26]. Differential Wavefront Sensing had only
been utilized for beam alignment until Schuldt, et al. successfully used it to back
out Z-displacement simultaneously with changes in pitch and yaw in the Laser
Interferometer Space Antenna (LISA) prototype system [6]. The resolution limits
that Schuldt and his team were able to achieve were impressive: a 2 pm Hz−1/2
noise floor in translation and a 1 nrad Hz−1/2 noise floor in pitch and yaw. These
noise levels were obtained using a custom FPGA circuit much like the one being
developed for the multi-DOF interferometer in addition to a similar interferometer
architecture. By building from their findings, it is theoretically possible to achieve the
same resolution in vacuum needed to match or exceed the resolution limits currently
needed in wafer stage metrology for the lithography industry.
Figure 2.8: A schematic showing the differences in phase across the differentialwavefront sensor and how they correspond to a pitch or yaw.
The DWS technique uses a quadrant photodiode which is essentially four
photodetectors in a 2x2 array. The spacing between the centroids of the
photodetectors must be known very precisely because it is used in the calculations
of pitch and yaw. Figure 2.7 shows the measurement beam of the interferometer

35
incident on the quadrant photodiode (denoted by DWS) with a tilted wavefront with
respect to the reference beam. By creating a weighted average over all four detectors,
pitch and yaw measurements are created while a Z-displacement measurement is
the global average over all four quadrants. Figure 2.8 demonstrates a simplified
explanation of the phase differentials used to create the angular measurements. In
Figure 2.8a, a characteristically different phase reading in the B and D quadrants
compared to the A and C quadrants is evident. Furthermore, in Figure 2.8b a
difference in phase can be seen in the A and B quadrants compared to the C and D
quadrants. The weighted average is created using
Z − displacement ∝φA + φB + φC + φD
4
Pitch ∝(φA + φB)− (φC + φD)
L1
Y aw ∝(φA + φC)− (φB + φD)
L2
,
(2.4)
where letters symbolize the phase readings in each quadrant and L1 and L2 are
the distances between centroids on the quadrature photodetector. Utilizing this
method, the multi-DOF interferometer is capable of making three degree-of-freedom
measurements using a very small profile on the stage mirror compared to commercial
tip/tilt sensitive displacement interferometers. The multi-DOF interferometer was
qualified against one of these commercial interferometers and those results are
discussed in Chapter 3. Before qualification, however, preliminary results were
recorded to examine the tip/tilt sensitivity of the interferometer. The results are
discussed next.

36
2.4 Preliminary Benchtop Data
The following measurements were obtained using a benchtop setup of the multi-DOF
interferometer. Results were recorded in collaboration with the company InSituTec,
who was interested in utilizing the interferometer for micro-motion stage calibrations.
These measurements were presented at the 27th ASPE Annual Meeting in San Diego,
CA [33].
One of the first preliminary measurements involved running a small piezo
actuation stage (the Physik Instrumente P-611.3S Nanocube®) through a 100 µm
open-loop linear ramp. For this first measurement, only one SRS-830 lock-in
amplifier was available for use, so a single photodetector was used instead of a quad
photodetector. As mentioned, the stage was in open-loop control and therefore was
not expected to move linearly. The results of this experiment are shown in Figure 2.9.
Figure 2.9: First preliminary measurement run using a single photodetector insteadof the quad photodetector. Measured stage was the Physik Instrumente P-611.3SNanocube® and the linear error is within the specifications of the piezo stage.

37
After this first preliminary measurement, three more lock-in amplifiers were
obtained to acquire full three degree-of-freedom measurements. A custom
titanium flexure-based piezo stage was provided by InSituTec (part number
IT.PS.X20.TI.CS.RZ) which contained a built in capacitance sensor and sub-50 pm
positioning resolution. The first test was run with the stage held at a constant voltage
to examine the noise floor of all three degrees of freedom in the interferometer. The
results are shown in Figure 2.10 and were obtained using a sampling frequency of
1 kHz and a final low pass filter at 300 Hz.
Figure 2.10: Preliminary noise measurements conducted on InSituTec’sIT.PS.X20.TI.CS.RZ micro-positioning stage with 300 Hz low-pass filter imple-mented. Stage was held at a constant position. Data axes have been offset forclarity.
The results of Figure 2.10 are encouraging for first measurements and demonstrate
an easily attainable low noise floor obtained in open-loop control. After these
measurements were recorded, the same stage was run in open-loop through a 20 µm
scanning range of motion to demonstrate displacement, pitch and yaw sensitivity.

38
The results are shown in Figure 2.11 and are within the specifications of the stage.
Figure 2.11: Initial measurement of InSituTec’s IT.PS.X20.TI.CS.RZ stage in open-loop scanning; 20 µm, pk-pk of Z-displacement with 0.9 µrad and 0.4 µrad of pitchand yaw motion, respectively.
Finally, the built in capacitance sensor within the piezo stage was utilized
to examine the repeatability and accuracy of Z-displacement measurements.
Measurements were made using a custom linearization algorithm to increase the
accuracy of the stage in closed-loop control. Fifty random steps at random locations
within the 19 µm work volume were performed and the difference between the
internal sensor and the interferometer was calculated after settling. The error is
calculated from a single measurement point (no averaging). Figure 2.12 shows the
result of closed-loop control random steps. Clearly, there are no correlations relating
to the stage position nor the step size, signifying the linearization algorithm is not
showing bias. It is evident that, under its own built-in closed-loop control, the stage
is capable of sub-nanometer positioning. Furthermore, step response repeatability

39
Figure 2.12: Error after settling for 50 random steps of varying sizes and varyinglocations throughout the work volume of InSituTec’s IT.PS.X20.TI.CS.RZ stage.The x-axis designates the initial starting position of the stage while the y-axisdesignates the controlled step size from that initial location. Red error bars representthe interferometer’s measurement error compared to the stage’s built in capacitancesensor. The standard deviation of the error is 0.386 nm over all 50 random steps
was independent of initial stage position and step size, signifying a robust stage
controller and more importantly, an interferometer capable of reliable high-resolution
measurements.
One of the major benefits of this interferometry system is the ability to switch
the acousto-optic modulators to increase the split frequency to accommodate higher
Doppler shifts. The following measurements were run after switching out one of the
AOMs to change the split frequency from 70 kHz to 5 MHz. In doing so, the SRS-830
lock-in amplifiers could no longer be used as they can only lock to a maximum of
100 kHz reference frequency.
In order to record these measurements, Chen Wang, an electrical engineer within

40
the Precision Instrumentation Group created his own custom phasemeter using a
$500 demonstration board. The measured stage was also switched to a stepper
stage with a stated specification of achieving 400 mm/s velocities. This stage was
run in open-loop through a 9 mm range of motion to demonstrate the viability of
high-velocity measurements with the interferometer. The results can be seen in
Figure 2.13.
Figure 2.13: A stepper stage was run in open-loop to demonstrate theinterferometer’s capabilities in high-velocity measurements. One AOM was switchedout to increase the split frequency to 5 MHz in order to accommodate a higherdoppler shift.
Figure 2.13 demonstrates a high dynamic range for the multi-DOF interferometer.
Since one potential application of this research is wafer metrology for the lithography
industry, the capability for high-velocity measurements is extremely valuable. Wafer
stages move at velocities faster than 1 m/s, however, no stage capable of such

41
high speeds was available for measurement. Since no other high-velocity stages
were available for use, the high-speed stepper stage is adequate for a preliminary
demonstration of an AOM-driven tunable split frequency.
2.5 Technology Summary
To conclude, preliminary measurements have provided a solid trajectory for future
work. A high level of tip and tilt sensitivity was observed in the interferometer;
however, with these results alone there is no way to know if the pitch and yaw values
are correct. Towards this end, a qualification of the pitch and yaw measurements of
the interferometer against a commercial system will be provided in Chapter 4.
In terms of Z-displacement, there was a close agreement between the built
in capacitance sensor in InSituTec’s IT.PS.X20.TI.CS.RZ piezoelectric stage and
the multi-DOF interferometer. This tested positioning stage cites a sub-50 pm
positioning resolution and the standard deviation between the interferometer and
the positioning stage over 50 random steps was 386 pm [33].
Creating a split frequency using acousto-optic modulators has been demonstrated
as a very reliable method when a spatially separated launch is desired to minimize
periodic nonlinearity. It is also very simple to create a tunable split frequency
to accommodate higher doppler shifts by switching out one of the AOMs. Fiber
effects on the interferometer have been qualified and deemed negligible if the proper
precautions are taken in the design of the interferometer and phase detection
circuitry.

42

43
3 System Design
One of the most critical design considerations for the multi-DOF interferometer was
thermal sensitivity. When designing a displacement interferometer such as this, it is
important to remember that the tool is used to detect sub-nanometer displacements.
Therefore, a thermal deformation in the assembly could very likely produce a false
measurement. Furthermore, displacement interferometers are alignment sensitive,
meaning a thermal deformation as a result of over-constraining a component could
theoretically produce a deformation which could yield a misalignment and its
resulting effects (non-ideal fringe contrast, periodic nonlinearity, loss of signal).
Mechanical engineering techniques to avoid these consequences tend to evolve into
the field of precision design. A variety of mounting techniques and design principles
exist specifically to tackle thermal problems such as these. Some examples include the
use of kinematic mounts, thermally matching materials so they expand at nominally
the same rates, and most importantly, a critical evaluation of how to apply these
precision engineering principles.
Kinematic mounting in the multi-DOF interferometer was designed using the
principles of a Kelvin clamp [34]. The most important concept involved with this

44
type of mounting is maintaining that the structure is never over-constrained; i.e.,
exactly six degrees of freedom are constrained for a stationary object. A schematic
explaining the two versions of a Kelvin clamp that were used in the multi-DOF
interferometer can be seen in Figure 3.1.
Figure 3.1: Kelvin clamp kinematic mounting schemes to avoid over-constrainedsystems. (a) Three ball in v-groove mounts produce thermal insensitivity about thecenter of the triangle. (b) flat/v-groove/cone mounting scheme keeps the cone pointstationary while allowing the other points expand freely away from that point.
The two variations of the Kelvin clamp were eventually used in the mounting
of fiber collimators at fiber detection sites and in the mounting of the main Invar
optical support structure to a stainless steel base. The designs of both of these
will be elaborated on later in the chapter. A general rule in precision design is to
try to kinematically mount dissimilar materials whenever possible. Slight thermal
expansion is usually inevitable, even in a relatively well controlled laboratory setting
such as the one where the research for this thesis was conducted. The temperature
control in that laboratory was nominally 20 ± 0.5C over one hour. Despite this

45
relatively stable environment, preliminary benchtop testing of the interferometer
using modular components yielded a slight thermal drift. This result can be seen in
Figure 3.2.
0 10 20 30 40 50 60
−30
−20
−10
0
10
20
30
Time [min]
Dis
plac
emen
t [µm
]
0 10 20 30 40 50 60
−30
−20
−10
0
10
20
30
Time [min]
Dis
plac
emen
t [µm
]
Disp −6
−4
−2
0
2
4
6
Rot
atio
n [µr
ad]
−6
−4
−2
0
2
4
6
Rot
atio
n [µr
ad]
YawPitch
Figure 3.2: Preliminary benchtop testing of the interferometer yielded a slightthermal drift over the span of one hour, even though the laboratory is temperaturecontrolled to within 20± 0.5C.
Simple stress analyses were performed on multiple components within the
interferometer, but in general, the assembly will never be subjected to considerably
high stresses. Vibration effects are usually extremely important to quantify for
precision systems; however, this interferometer will typically be used on a vibration
isolation table which will damp resonance effects from outside forces. Despite this,
an evaluation of natural frequencies should not be avoided in any precision system,
and a full vibration analysis will be extremely important in future work.
The system design of the interferometer went through two full iterations before

46
arriving at a satisfactory assembly. Both designs will be presented, the first of
which will only be discussed briefly because it was not manufactured. The decision
to completely redesign the interferometer was based on the capability of a compact
design, which arguably was not fulfilled in the first iteration. Figure 3.3 demonstrates
the transition between iterations of the interferometer.
Figure 3.3: First and second design iterations of the multi-DOF interferometer. Theinterferometer was completely redesigned to achieve a smaller footprint than the firstiteration.
Before both interferometers were designed, a geometrical optical analysis was
conducted to examine the alignment requirements of the beamsplitters. It had
already been hypothesized that cube beamsplitters would produce unwanted ghost
reflections which could contribute to periodic error [35], so the decision was made to
utilize plate beamsplitters with a 30 arcmin wedge to scatter ghost reflections. As can

47
be seen in Figure 3.3, the plate beamsplitters are mounted at a very specific angle
in both iterations. Tight, micrometer-level tolerances were placed on the optical
support structure which was manufactured using Wire-EDM (Electrical Discharge
Machining). The angle between the beamsplitting faces must be 90, however, the
alignment of the beams at the output was still very important and needed to be
simulated. The analysis was done in a Solidworks sketch in which Snell’s law and
the law of reflection were used to determine beam paths for the measurement and
reference signals. Figure 3.4 displays the model in sketch mode. All refraction and
reflection angles are created using driven equations all related back to the original
input angle of the two beams. Figure 3.5 shows the model out of sketch mode after
output beams have been made coincident. It was determined that if the measurement
and reference beams were both launched into the interfereomter with a parallel
orientation, they would overlap collinearly at the output but would be angularly
offset by around 0.5. This angular offset was eventually addressed in the angular
alignment of fold mirrors in the interferometer.
After this basic optical analysis was conducted to simulate beam paths, the
interferometer was designed around the beamsplitter orientations. Due to the
interferometer’s alignment sensitivity, the first design iteration utilized tip/tilt
adjustable kinematic mounting at every launch and fold mirror surface. However,
the consequence of this complicated mounting was that the footprint of the entire
interferometer was much bigger than desired. In the second design iteration of the
interferometer, the launch site was not kinematically mounted which condensed the
design considerably. The first and second design iterations will now be discussed.
Although the first iteration was fully designed, only general figures will be presented
to give a concise overview.

48
Figure 3.4: Beam paths in the interferometer were simulated using a Solidworkssketch. The reference path is overlaid with a dotted orange line and the measurementpath is overlaid with a blue line for clarity. Beamsplitter boundaries are overlaid inred.

49
Figure 3.5: The interferometer Solidworks model out of sketch mode withmeasurement and reference beams made collinear at the output. Beam input spacingwas optimized to be 15.904 mm. The rest of the interferometer was designed aroundthis model.

50
3.1 First Design Iteration
Although the first design iteration was never manufactured, it is still useful to
present design decisions that went into this first interferometer as many of the same
principles were used in the final design. Multiple mechanical design constraints
for interferometer configurations were considered. After evaluating many of the
advantages and disadvantages, the interferometer configuration shown in Figure 3.6
was chosen for the first iteration. Through the month of September, 2012, this first
iteration was designed in Solidworks and is visualized in Figure 3.7. In this section,
each component will be presented and discussed. To begin with, the fold mirror
kinematic mounting assemblies will be presented.
Figure 3.6: The first iteration design of the multi-DOF interferometer was based onthis schematic.

51
Figure 3.7: Solidworks design of the first iteration of the multi-DOF interferometer.Top two images with aluminum casing, bottom two with aluminum casing hidden.Interferometer relies heavily on magnetically preloaded kinematic mounts.
3.1.1 Fold Mirror Kinematic Mounts
The interferometer, as previously stated, is alignment sensitive, which is why the
fold mirrors were not rigidly mounted. Alignment of the launch and detection beams
can be individually adjusted using the feature shown in Figure 3.9.
The mounts were designed using a three point Kelvin clamp to promote thermal
insensitivity. The center image of Figure 3.9 shows the three set screw support
points. The set screws are supplied by Thorlabs and have a M2.5-0.20 thread for fine
adjustment (200 µm of travel per revolution). Supporting the screws are threaded

52
Figure 3.8: First iteration interferometer designating the fold mirror kinematicmounts.

53
Figure 3.9: Left: full kinematic assembly designed to support fold mirrors, Center:Back support plate which contains set screws for tip/tilt adjustment, Right: Mirrorsupport face which magnetically mates to the back support plate.
bronze bushings which press fit into their respective support holes. The set screws
mate to the six dowel pins which lay in machined v-grooves. It can also be seen
in Figure 3.9 that the center and right images are magnetically preloaded with six
neodymium permanent magnets. This structure is capable of fine adjustment in
tip and tilt using the Thorlabs set screws in addition to the capability for fast and
easy assembly and disassembly from using preload magnets. The Kelvin clamp is
designed such that the three set points are rotationally positioned 120 from each
other. The axes of the v-grooves intersect in the middle of the part which happens to
be coincident with the nominal axis at which the incoming laser beam would travel.
This design promotes thermal insensitivity because, as the front mirror support face
expands and contracts relative to the back support as a result of thermal expansion,
for example, the mirror is still nominally held in the same position and will minimally
affect the alignment of an incoming beam. It will be shown in the next section
that this same principle is applied to the kinematic mounting scheme for the fiber
collimators.

54
3.1.2 Mounting Fiber Collimators on the Critical Face
Figure 3.10: Interferometer configuration designating the critical face which is usedto support kinematically mounted fiber collimators.
Before the design of the first iteration, it was determined that the interferometer
configuration shown in Figure 3.10 was advantageous because it is not too wide, and
only requires one critical face for mounting fiber collimator packages. The one critical
face makes the interferometer installation easier than needing access from multiple
sides. The critical face shown in Figure 3.10 uses the same kinematic mounting
principle which was discussed in the previous section to mount the fold mirrors. The
subassembly is shown in more detail in Figure 3.11.

55
Figure 3.11: Top Left and Right: Full critical face subassembly. Bottom Left:Critical face support structure. Bottom Right: Fiber collimator kinematic mountswhich are magnetically preloaded.
From the previous section, all four fiber collimator mounts use the same thermally
insensitive Kelvin clamp mounting scheme to ensure that as the mounts thermally
expand and contract relative to the support structure, the fiber collimators remain
nominally in the same location. All four collimator mounts can also be adjusted
in pitch and yaw using fine pitch set screws in the same fashion the fold mirror
kinematic mounting scheme did. All mounts are magnetically preloaded for easy
and fast assembly and disassembly while still maintaining a strong and stationary
connection. It can be seen in the top right image of Figure 3.11 that the support
structure rigidly mounts to the baseplate of the interferometer with three countersunk
holes. It is critical that this support face be mounted rigidly to the baseplate of
the interferometer, and for that reason, a reinforcing L-bracket was implemented to
further constrain the support structure of the critical face assembly (Figure 3.11) to

56
the baseplate of the interferometer (shown later in Figure 3.16). This L-bracket can
be seen in Figure 3.10 as well.
3.1.3 Kinematic Mounting of Beamsplitting Components
Figure 3.12: Image of the interferometer designating kinematically mountedbeamplitting components.
The interferometer’s beamsplitting components are the most alignment sensitive
parts in the entire assembly. For this reason, the two beamsplitters were designed to
be epoxied to a wire-EDM’ed mounting surface which is then magnetically preloaded
and supported with a 3-point Kelvin clamp using the same working principle of

57
the other kinematic mounts in the first iteration interferometer. The mounting
surface is responsible for holding four critical components: the two beamsplitters,
the stationary reference mirror, and one fold mirror in the reference arm of the
interferometer. A detailed view of the subassembly can be seen in Figure 3.13.
Figure 3.13: Beamsplitter mounting scheme employing Kelvin Clamp for thermalinsensitivity.
The Kelvin clamp mounting principle is more important in this beamsplitter
mount design compared to the fold mirror kinematic mounts and the fiber collimator
kinematic mounts. This is because the mounting surface is wire-EDM’ed Invar,
which has a similar thermal expansion coefficient to Fused Silica, the material of
the beamsplitting components (Invar CTE: 1.2 x 10−6 mm−K
and Fused Silica CTE:
0.55 x 10−6 mm−K
). These two materials are reasonably thermally matched so the

58
epoxied interface will not exhibit too much stress from thermal loading when both
materials expand at different rates. Thermally mismatched materials produce stress
concentrations at the epoxy interface, creating unwanted deformations which can
affect beam quality and/or alignment. Returning to the Kelvin clamp mechanism,
the Invar part will expand at a different rate than the stainless steel support structure
of this subassembly which makes it very critical that the beamsplitting optics remain
nominally in the same location to ensure robust measurements. The Kelvin clamp
achieves this working principle.
If the Invar part and optics were to be assembled, wire-EDM’ed offset plates
would have been used to create the offset from the bottom surface that is seen in
the bottom left image of Figure 3.13. Optics would have been further aligned using
critical faces on the invar part. These critical faces are labeled in Figure 3.14.
Figure 3.14: Invar optical mount designating critical faces for alignment which willbe wire-EDM’ed.

59
As shown in Figure 3.14, the Invar optical mount requires four critical surfaces
with tight tolerances to ensure alignment. In addition to these four critically flat
surfaces, it can be seen that each surface has a corresponding alignment ridge
for constraining lateral motions. The location of the tips of these ridges was
toleranced tightly as well to ensure alignment. Also, a protruding ridge towards
the top of Figure 3.14 maintains that the reference mirror will not be touched if
the interferometer is pushed up to a measurement surface (almost to the point of
contact).
3.1.4 Interferometer Baseplate
The interferometer baseplate is a simple stainless steel structure which has the main
working principle of ensuring complete stiffness to the assembly. The plate is designed
to be manufactured using a 7/16” plate of stainless steel, cut to size. The interface
between the baseplate and critical face which supports the fiber collimators and their
kinematic mounts is reinforced by the L-bracket which can be seen in Figure 3.15
which will also be made of stainless steel. The baseplate on its own can be seen in
Figure 3.16.
On the right image of Figure 3.16 it can be seen that the baseplate is designed
to accommodate socket head cap screws. The screw locations are counter-bored so
they are hidden from view and the interferometer will still lie flat on a surface.

60
Figure 3.15: The interferometer baseplate designated on the full assembly.
Figure 3.16: 7/16” baseplate support for a stiff interferometer.

61
3.2 Second Design Iteration
The same kinematic mounting principles from Figure 3.1 were applied to the second
design iteration of the multi-DOF interferometer. After the first iteration had been
completely designed, the capability for a more compact assembly became apparent.
Some of the components and methodologies from the first design iteration were
used in the second design iteration. The same kinematic mounting scheme for
the fiber collimators (shown in Figure 3.11) is still used in the new interferometer
configuration. In addition, the Invar optical support structure is still kinematically
mounted to a stainless steel base, although the configuration of the mounting was
switched from what is shown in Figure 3.1a to that of Figure 3.1b. Figures 3.17 and
3.18 provide an overview of the final interferometer and design considerations will
be discussed next.
Figure 3.17: The transition from concept to reality in the second design iteration ofthe multi-DOF interferometer. Solidworks model shown.

62
Figure 3.18: A full view of the second iteration of the multi-DOF interferometer.
3.2.1 Fiber Collimator Kinematic Mounts
A goal of the multi-DOF interferometer was to have a completely fiber delivered
and fiber detected system. To achieve this, a fiber detection assembly needed
to be created which had fine tip/tilt adjustment to maximize coupling efficiency.
Thorlabs aspheric fiber collimators were purchased and the kinematic mounts shown
in Figure 3.20 were designed around them. The mounting face was drilled and tapped
for the 11 mm x 0.5 in. mounting thread which the collimators possessed. The same
Kelvin clamping scheme which is seen in every kinematic mount in the first iteration

63
design was used. This Kelvin clamp design is simple to manufacture. As seen in
Figure 3.20, dowel pins rest in v-grooves which are manufactured to a given depth
using a 90 pointed end mill. The fine pitch set screws and their copper threaded
bushings are press fit into a reamed through hole.
Figure 3.19: Fiber collimator kinematic mounts designated on the full assembly.
The only major difference between this kinematic mount and the mounts from
the first iteration design is that preloaded springs have replaced magnets. The
Neodymium magnets that were used in the first iteration were bulky for the preloaded
force they generated. Springs, conversely, provide the same preload force with a
smaller design footprint. These preload springs can be seen throughout the second

64
Figure 3.20: Left: Full kinematic assembly used to mount detection fiber collimators,Center: Front mounting face, Right: Back support face with set screws shown.
design iteration.
The fiber collimator kinematic mounts are connected to the base of the
interferometer via countersunk #8-32 socket head cap screws from the bottom of
the stainless steel base. The countersunk holes in the base of the interferometer are
slotted to allow lateral translation and the mounts themselves can be shimmed to a
variable height if that adjustment is needed.
3.2.2 Fiber Collimator Squeeze Clamps
To achieve a compact design, some of the kinematic mounting from the first design
iteration was eliminated. The replacement mounting fixtures for the fiber launch into
the interferometer became the squeeze clamps which are designated in Figure 3.21.
These clamps were manufactured out of stainless steel and the mounting holes
were drilled with a loose tolerance to allow angular adjustment of the input launch
angle into the interferometer beamsplitters. Figure 3.22 provides an overview of
the mechanical analysis which was run on the fixtures. A finite element model
was created using Solidworks Simlulation Xpress – a linearized finite element tool.

65
Figure 3.21: Fiber collimator squeeze clamps designated on the full assembly.
The clamps were analyzed using a Von Mises stress analysis because the material is
considered ductile since it is designed to yield. The squeeze clamp yields along the
line of highest stress when a force close to 12 lb (53.4 N) is applied. This force value
was deemed a reasonable load for a person to apply using an Allen wrench to tighten
the restraining #4-40 screws which tighten the clamps.

66
Figure 3.22: Von Mises stress analysis performed on the fiber collimator squeezeclamps. The stresses seen in this figure are a result of a 6 lb squeezing force. Thematerial yields when a squeezing force close to 12 lb is applied.
3.2.3 Optical Support Structure
The beamsplitters in the multi-DOF interferometer are made of Fused Silica, and it
was previously noted that this glass material is relatively thermally matched to Invar.
To mitigate thermal effects, the optical support structure which beamsplitters and
fold mirrors are epoxied to was created out of Invar. The critical faces which are used
to align optical components were wire-EDM’ed with micrometer-level tolerances. The
optical support structure needed to accommodate three set screw locations which
give the part variable height and tip/tilt adjustment if required. These set screws
are longer versions of those seen in the fiber collimator kinematic mounts and utilize
the same threaded brass bushings for actuation.

67
Figure 3.23: Optical support structure designated on the full assembly.
Since the Invar part is kinematically mounted to the stainless steel base via
preloaded springs, the stresses as a result of this loading were predicted using a
linearized finite element analysis (Solidworks Simulation Xpress). Each preload
spring produces nominally a 5 lb (22.2 N) restraining force at each of the dowel
pin’s recessed v-grooves. The results of a Von Mises stress analysis can be seen in
Figure 3.24. In this figure it is evident that the induced stresses in the part are
far below the yield strength of Invar so deformations were deemed negligible in that
they would not produce misalignments. Furthermore, any small misalignments from
deformations produced in the optical support structure could still be corrected by

68
adjusting the alignment of the squeeze-clamped launch beams into the interferometer.
The Invar part is mated kinematically to the stainless steel base which will be
discussed next.
Figure 3.24: Stress analysis performed on the Invar optical support structure. Thestresses seen in this figure are a result of a 5 pound preload force from each of thefive springs. The induced stresses are so far below the yield stress of the materialthat deformation was deemed negligible.
3.2.4 Stainless Steel Base
Besides the Invar optical support structure, all additional components are
manufactured using 304 stainless steel for stiffness. Stainless steel is typically
chosen in opto-mechanics applications due to its superior resistance to deformation
compared to aluminum in addition to a lower thermal expansion coefficient.
The stainless steel base mates to the Invar optical support structure via a

69
Figure 3.25: 304 Stainless steel base designated on the full assembly.
kinematic mounting scheme which can be seen in Figure 3.26. This mating scheme
places the ball-in-cone origin of the kinematic mount at a coplanar location compared
to the reference mirror of the interferometer. The result of this placement is that
the optical support structure will tend to expand or contract in the perpendicular
direction from the reference mirror. As a result, the same expansion is seen in the
measurement and reference arms of the interferometer, so they cancel. The flat of the
kinematic mount is made out of tungsten carbide. This material was chosen because
it is harder than the stainless steel set screw which it supports and tungsten carbide
has a lower coefficient of friction on stainless steel when compared to a stainless-

70
Figure 3.26: The stainless steel base of the interferometer mates to the opticalsupport structure via a kinematic mount shown here. The mount is designed tothat thermal expansion produces the same change in length in the measurement andreference arms of the interferometer, thus, they cancel out.

71
steel-on-stainless-steel coefficient. A low coefficient of friction is desired to let the
structure expand and contract freely without producing unwanted deformations in
the Invar material. It is also advantageous that tungsten carbide is harder than
304 stainless steel because deformations will contribute to friction during thermal
expansion.
The base structure has two sets of mounting holes. One set adapts to #8-32
screws from the bottom of the part and the other adapts to 1/4”-20 screws from
the top. As previously mentioned, the countersunk mounting holes which the fiber
collimator kinematic mounts mate to are slotted, allowing for translation.
Figure 3.27: The base support structure of the interferometer and a selected numberof features.

72
3.2.5 Assembly
All discussed parts from the second design iteration were manufactured and
assembled to arrive at a compact working prototype. Special care was taken in
the assembly process to ensure that the interferometer was capable of making
measurements before all components were locked in place using a UV curing adhesive.
In order to do this, the optics on the Invar optical support structure were aligned
and interference signals were monitored as the adhesive was curing. The described
setup is shown in Figure 3.28 in which four interference signals (three from the quad
photodetector and one from the reference channel) can be seen in the background
as the assembly cures. The adhesive used (Dymax OP-4-20632) was designed
specifically for optical component assembly and has a very low coefficient of thermal
expansion for minimal thermal drift.
Figure 3.28: Monitoring interference as the working prototype assembly cures undera UV source.

73
After curing, the optical support structure was mounted to the stainless steel
base using preload springs. The final working assembly can be seen in Figure 3.29.
Figure 3.29: The final assembled prototype of the multi-DOF interferometer.
3.3 Future Design Implementations
After two full design iterations, the multi-DOF interferometer was considered
satisfactory. A qualification of this precision design in comparison to the benchtop
setup and Renishaw’s ML10 displacement interferometer is presented in Chapter 4.
Some changes and additions would enhance the design but are beyond the scope
of this work. A selection of commercial interferometers have a fine yaw adjustment,
so the measurement beam can be easily aligned to a target mirror or retroreflector.

74
A fixture such as this could be designed and attached to the interferometer using
its 1/4”-20 mounting holes. Furthermore, the design of simple inserts which can
be wedged into the fiber collimator mounting locations for optical alignment would
prove advantageous to the interferometer. These types of alignment fixtures are
frequently available with commercial systems.
It was previously mentioned that a vibration analysis was not performed on the
interferometer. This is critical for any precision engineering project, and if time
constraints had allowed, a full vibration analysis would have been performed on
this assembly. Instead, it is left as future work on the interferometer, and in the
meantime, the tool will only be used on vibration isolation tables.

75
4 Interferometer Qualification
Qualification measurements between Renishaw’s ML10 interferometry system, a
benchtop setup of the multi-DOF interferometer and the working prototype from
Chapter 3 were conducted. Qualification measurements between the benchtop
interferometer and the Renishaw system will be presented first, followed by a
discussion of the qualification between the working prototype and the Renishaw
system. It will be shown that an inconsistent scaling factor existed between the two
interferometers and most of the time, the multi-DOF interferometer needed to be
scaled by a factor greater than 1 to increase its tip/tilt sensitivity.
4.1 Benchtop Qualification Measurements
For the qualification of the benchtop interferometer, a micro-positioning stage
(Physik Instrumente P-611.3S Nanocube®) was outfitted with a small plane mirror
target for the multi-DOF interferometer and a differential retroreflector setup for
Renishaw’s ML10 interferometer. The two measurement targets were epoxied on
opposite ends of the translating stage to record the same displacement, pitch and

76
yaw measurements. The first setup implemented was to qualify yaw in the multi-
DOF interferometer against the Renishaw system. The setup of both interferometers
measuring oppposite sides of the same stage can be seen in Figure 4.1.
Figure 4.1: Setup implemented to qualify the benchtop multi-DOF interferometeragainst the Renishaw ML10 interferometer. Left: A full overview of both systems,the Renishaw laser source can be seen at the top of the image. Right: A close upof the Renishaw differential retroreflectors and the multi-DOF target mirror epoxiedto opposite ends of the same stage.
The stage was initially displaced through a 50 µm linear ramp to observe yaw.
As more measurements were recorded, an inconsistent scaling factor became evident
between the interferometers. Yaw readings were less sensitive than the Renishaw
system while pitch measurements seemed to have a higher rotational sensitivity.
Figure 4.2 demonstrates a scaling factor which would continue to vary throughout
further measurements. After the 2.15 scaling factor was observed in Figure 4.2,
the Renishaw beamsplitting optics were slightly rotated to investigate how robust
its measurements were to misalignments. These beamsplitting optics can be seen

77
in Figure 4.1 just before the mounted retroreflectors on the piezo stage. The
beamsplitting portion of the measurement system was rotated in the azimuthal
direction relative to the differential retroreflector setup and was never rotated more
than 1 degree between measurement iterations. The small rotation yielded the results
shown in Figure 4.3 in which the scaling factor was shown to decrease slightly, but
was still significant.
0 5 10 15 20 25 30−2
2
6
10
14
18
Time [s]
Yaw
[µra
d]
0 5 10 15 20 25 30−2
2
6
10
14
18
Time [s]
Yaw
[µra
d]
Multi−DOFMulti−DOF (2.15 scaling)Renishaw
Figure 4.2: Initial scaling factor that was observed between the Renishaw ML10and the multi-DOF interferometer. Figures 4.3 through 4.5 demonstrate how thisscaling factor changed with an azimuthal rotational misalignment of the Renishawbeamsplitters.
Since the scaling factor had decreased with the rotation of the Renishaw
beamsplitters, the same iterative rotations were continued further in the azimuthal
direction to see if the scaling factor would continue to decrease. The interferometer
was rotated twice more and those results can be seen in Figures 4.4 and 4.5. Between
each iteration, again, the beamsplitters were not rotated more than a degree. In
Figure 4.4, it can be seen that the scaling factor does continue to decrease. However,

78
0 5 10 15 20 25 30−2
26
101418
Time [s]
Yaw
[µra
d]
0 5 10 15 20 25 30−2
26
101418
Time [s]
Yaw
[µra
d]Multi−DOFMulti−DOF (2.10 scaling)Renishaw
Figure 4.3: The Renishaw beamsplitter setup which yielded the results in Figure 4.2was subjected to an azimuthal rotational misalignment of less than a degree. Theresulting change in scaling factor is seen here. Noisy data compared to other figuresis due to a lack of an environmental containment box which was incorporated for allother measurements.
when the beamsplitters are rotated once more, the scaling factor increases to 2.20 as
seen in Figure 4.5.
Initially, it was hypothesized that the scaling factor seen in Figures 4.2 through 4.5
was nominally 2 because the interferometer fold factor had not been incorporated
into one of the measurements (multi-DOF or Renishaw). The conversion from a
change in phase to physical displacement contains an interferometer fold factor of 2
which represents a pass to the target mirror and a reflection back. It was unlikely
that Renishaw had left the fold factor out of their signal processing algorithm, so
the multi-DOF algorithm was double checked. Multi-DOF measurements did indeed
incorporate the value of 2, and so the source of the scaling factor was still unknown.
The scaling factor would continue to vary throughout the rest of the qualifying
measurements and would not necessarily stay close to a value of 2.

79
0 5 10 15 20 25 30−2
2
6
10
14
18
Time [s]
Yaw
[µra
d]
0 5 10 15 20 25 30−2
2
6
10
14
18
Time [s]
Yaw
[µra
d]
Multi−DOFMulti−DOF (2.06 scaling)Renishaw
Figure 4.4: The Renishaw system’s beamsplitters were once again subjected to afurther azimuthal rotational misalignment. This misalignment took place betweenthe results of Figure 4.3 and this figure.
0 5 10 15 20 25 30−2
26
101418
Time [s]
Yaw
[µra
d]
0 5 10 15 20 25 30−2
26
101418
Time [s]
Yaw
[µra
d]
Multi−DOFMulti−DOF (2.20 scaling)Renishaw
Figure 4.5: A final azimuthal rotation of Renishaw’s beamsplitting componentsproduced an increase in scaling factor. This result is different from that of Figures 4.2through 4.4 because azimuthal rotations in the same direction had produced adecreasing scaling factor until this point.
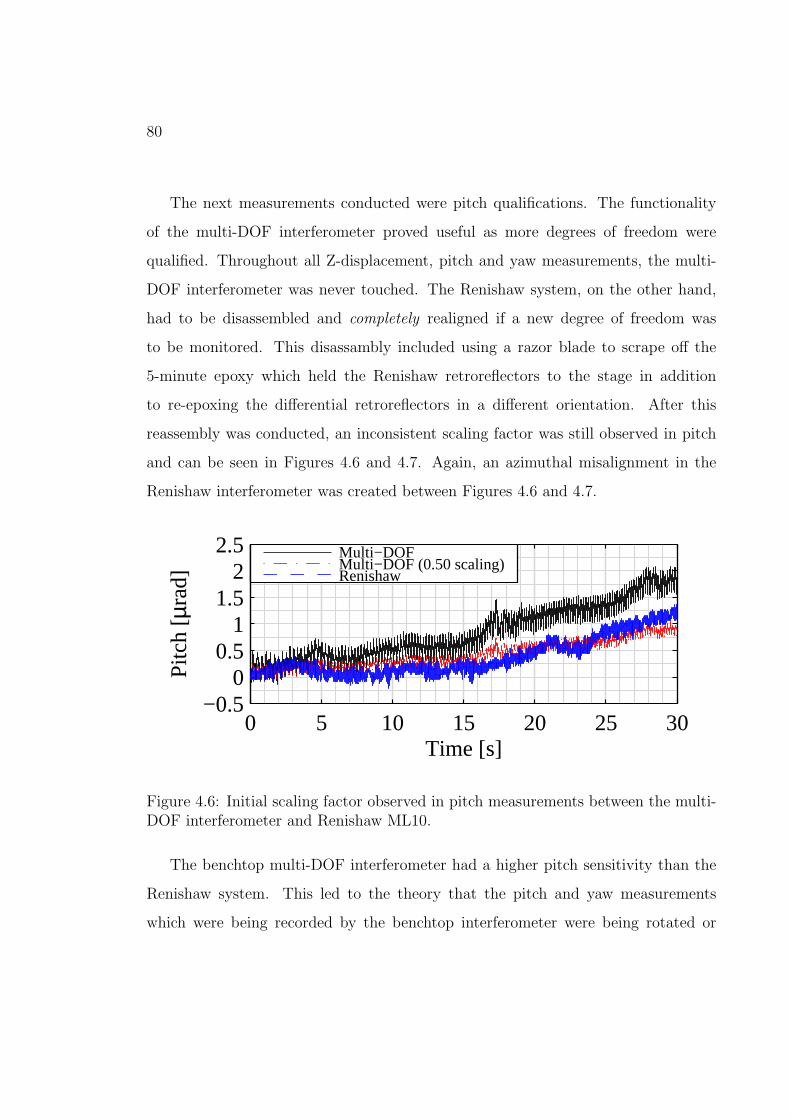
80
The next measurements conducted were pitch qualifications. The functionality
of the multi-DOF interferometer proved useful as more degrees of freedom were
qualified. Throughout all Z-displacement, pitch and yaw measurements, the multi-
DOF interferometer was never touched. The Renishaw system, on the other hand,
had to be disassembled and completely realigned if a new degree of freedom was
to be monitored. This disassambly included using a razor blade to scrape off the
5-minute epoxy which held the Renishaw retroreflectors to the stage in addition
to re-epoxing the differential retroreflectors in a different orientation. After this
reassembly was conducted, an inconsistent scaling factor was still observed in pitch
and can be seen in Figures 4.6 and 4.7. Again, an azimuthal misalignment in the
Renishaw interferometer was created between Figures 4.6 and 4.7.
0 5 10 15 20 25 30−0.5
00.5
11.5
22.5
Time [s]
Pitc
h [µ
rad]
0 5 10 15 20 25 30−0.5
00.5
11.5
22.5
Time [s]
Pitc
h [µ
rad]
Multi−DOFMulti−DOF (0.50 scaling)Renishaw
Figure 4.6: Initial scaling factor observed in pitch measurements between the multi-DOF interferometer and Renishaw ML10.
The benchtop multi-DOF interferometer had a higher pitch sensitivity than the
Renishaw system. This led to the theory that the pitch and yaw measurements
which were being recorded by the benchtop interferometer were being rotated or

81
0 5 10 15 20 25 30−0.5
00.5
11.5
22.5
Time [s]
Pitc
h [µ
rad]
0 5 10 15 20 25 30−0.5
00.5
11.5
22.5
Time [s]
Pitc
h [µ
rad]
Multi−DOFMulti−DOF (0.30 scaling)Renishaw
Figure 4.7: Change in pitch scaling factor as a result of Renishaw beamsplitterazimuthal rotational misalignment. The misalignment was created between theresults obtained in Figure 4.6 and this figure.
rolled somehow before arriving at the quadrant photodiode. To further evaluate
this hypothesis, pitch and yaw were combined and summed in quadrature. This
procedure was not trivial because the Renishaw system could only monitor one degree
of freedom at a time. As a result, pitch and yaw measurements from completely
separate test runs had to be analyzed in quadrature, which could potentially yield
misleading results. Precautions were taken to ensure this analysis was valid; the
piezo stage was never moved, nor the benchtop interferometer ever realigned. The
only inconsistency that existed between preliminary pitch and yaw measurements
was to move the quadrant photodiode closer or further away from the interferometer
to increase the signal in all four quadrants and improve fringe contrast. This had
been performed many times in the past when measurements were being taken with
the multi-DOF interferometer, assuming the distance of the quadrant photodetector
from the actual interferometer would not affect tip/tilt sensitivity. Later in the

82
discussion of these qualifications, it will become evident that changing the quadrant
photodiode location is not necessarily viable to achieve consistent measurements if
interfering wavefronts are not flat.
Essentially random iterations of measurement were combined and summed in
quadrature to see if there was still a scaling factor between interferometers. The
results can be seen in Figures 4.8 through 4.10. Between these three figures, the
scaling factor fluctuates wildly. At times, the nominal scaling factor of 2 from the
initial yaw measurements is evident (Figure 4.8). In other instances, the scaling
factor exceeded a value of 4 (Figure 4.9) and sometimes fell below 1 (Figure 4.10).
0 5 10 15 20 25 300
4
8
12
16
20
Time [s]
Qua
drat
ure
[µrad
]
0 5 10 15 20 25 300
4
8
12
16
20
Time [s]
Qua
drat
ure
[µrad
]
Multi−DOFMulti−DOF (2.10 scaling)Renishaw
Figure 4.8: Pitch and yaw measurements were combined and summed in quadratureto compare the full amplitude of tip/tilt sensitivity between interferometers. Pitchand yaw readings were selected at random as only one degree of rotational freedomcould be monitored at a time using the Renishaw interferometer.
The method of combining and summing pitch and yaw measurements from
both interferometers in quadrature yielded inconsistencies. However, as more pitch
measurements were recorded, it seemed that the qualifications were valid for small

83
0 5 10 15 20 25 300
4
8
12
16
20
Time [s]
Qua
drat
ure
[µrad
]
0 5 10 15 20 25 300
4
8
12
16
20
Time [s]
Qua
drat
ure
[µrad
]
Multi−DOFMulti−DOF (4.20 scaling)Renishaw
Figure 4.9: Further comparison of random pitch and yaw data combined and summedin quadrature yielded a varying scaling factor.
0 5 10 15 20 25 300
4
8
12
16
20
Time [s]
Qua
drat
ure
[µrad
]
0 5 10 15 20 25 300
4
8
12
16
20
Time [s]
Qua
drat
ure
[µrad
]
Multi−DOFMulti−DOF (0.75 scaling)Renishaw
Figure 4.10: Pitch and yaw data combined and summed in quadrature sometimescreated qualifications between interferometers which could not be accurately scaled.

84
rotations. Still measuring pitch with the Renishaw system, the same piezo stage was
run through a low amplitude sine wave and the corresponding pitch values agreed
very well between interferometers. This result can be seen in Figure 4.11.
0 5 10 15 20 25−2
−1
0
1
2
3
Time [s]
Pitc
h [µ
rad]
0 5 10 15 20 25−2
−1
0
1
2
3
Time [s]
Pitc
h [µ
rad]
Multi−DOF (no scaling)Renishaw
Figure 4.11: Qualifications between interferometers may be valid for small rotations.The data in this figure is one such example.
Before investigating the source of the inconsistent scaling factor further, the
Renishaw system was assembled to record Z-displacements (benchtop interferometer
was not touched). Z-displacement qualifications between interferometers agreed
within a micrometer for a linear ramp and sine wave. Refer to Figures 4.12 and
4.13 to observe a qualification between the two. The sub-micrometer agreement
between results is expected; the quadrant photodiode is essentially four displacement
interferometers measuring the same nominal change in phase across a wavefront, so
the global average over all four detectors was expected to yield relatively reliable
results. The calculation of pitch and yaw involves a weighted average, mentioned in
Chapter 2, which is probably not as consistent.
The errors in Figures 4.12 and 4.13 are attributed to cosine error. Cosine error is

85
0 5 10 15 20 250
20
40
60
80
100
Time [s]
Z−
Dis
plac
emen
t [µm
]
0 5 10 15 20 250
20
40
60
80
100
Time [s]
Z−
Dis
plac
emen
t [µm
] Multi−DOF (no scaling)Renishaw
−0.5
0
0.5
1
Err
or [µ
m]
−0.5
0
0.5
1
Err
or [µ
m]
Error
Figure 4.12: The qualification of Z-displacement between interferometers had amaximum error of about 0.5 µm over a 85 µm ramp.
0 5 10 15 20 25−30
−20
−10
0
10
20
30
40
Time [s]
Z−
Dis
plac
emen
t [µm
]
0 5 10 15 20 25−30
−20
−10
0
10
20
30
40
Time [s]
Z−
Dis
plac
emen
t [µm
] Multi−DOF (no scaling)Renishaw
−2
−1
0
1
2
Err
or [µ
m]
−2
−1
0
1
2
Err
or [µ
m]
Error
Figure 4.13: The qualification of Z-displacement between interferometers was alsovalid to within ± 0.75 µm for a sine wave.

86
created when the axis of the measurement beam is not parallel to the axis of motion
of the stage. The end result is the stage displaces at a slight angle relative to the
optical measurement axis, and thus, the interferometer records a cosine component of
the actual displacement taking place. A schematic explaining this concept is shown
in Figure 4.14. In reference to Figure 4.12, the maximum error reading was nominally
500 nm. The result of a cosine error calculation over a 85 µm range of motion yields
cos−1(85 µm/85.5 µm) = 6.2. If we consider that this error could occur in either
the Renishaw system or the benchtop multi-DOF system, approximately 3 of cosine
error per interferometer is within reason for nominal alignment given the relatively
short travel range of the piezo stage.
Figure 4.14: The errors in Figures 4.12 and 4.13 are attributed to cosine error. Theeffect of cosine error is that one or both interferometers measure a cosine componentof the actual displacement taking place.
Up until this point the quadrant photodiode had been moved slightly closer or
farther away from the interferometer to optimize signal output in all four quadrants.
To minimize all variables, the quadrant photodiode was held at a constant location for

87
the succeeding measurements. In addition to this, a focusing lens was implemented
before the quadrant photodiode which had been previously demonstrated to increase
fringe contrast in each of the quadrants. The focusing lens was used to focus the
light to a point, and then as it was expanding past this point, the wavefront was
captured on the quadrant detector when the beam radius was slightly larger (by
about 0.25 mm) than the size of the quadrant detector. Overfilling the detector like
this should not have affected results as the wavefront tilt angle should theoretically
be constant, regardless of the size of the beam diameter. It would soon be realized
that this was only true for flat wavefronts, which also is an assumption made in pitch
and yaw calculations when using the quadrant photodiode [26].
Utilizing this setup, pitch and yaw qualification measurements produced an
interesting phenomenon, they were all scaled by exactly 3.325. Figures 4.15 through
4.17 are the result of repeated yaw measurements while rotating the Renishaw
beamsplitters between iterations in the azimuthal direction. Azimuthal rotations no
longer produced a slight change in scaling factor as was seen in Figures 4.2 through
4.4. The 3.325 scaling factor was surprisingly robust and still held true for a sine
wave (shown in Figure 4.18).
At this point, the Renishaw system was again completely disassembled,
reassembled and realigned to record pitch measurements. The focusing lens and
quadrant photodiode were not touched. The scaling factor of 3.325 was again valid
for pitch measurements, and results can be seen in Figures 4.19 and 4.20 in which
the Renishaw beamsplitting optics were rotated in the azimuthal direction between
measurements. A sine wave yielded the results shown in Figure 4.21 in which the
3.325 scaling factor was still consistent.
The 3.325 scaling factor was robust through the measurements made in

88
0 5 10 15 20 25 3005
1015202530
Time [s]
Yaw
[µra
d]
0 5 10 15 20 25 3005
1015202530
Time [s]
Yaw
[µra
d]
Multi−DOFMulti−DOF (3.325 scaling)Renishaw
Figure 4.15: Utilizing one focusing lens before the quadrant photodiode, a scalingfactor of 3.325 was created which was valid for all Renishaw measurements despitebeamsplitter azimuthal rotational misalignments.
0 5 10 15 20 25 3005
1015202530
Time [s]
Yaw
[µra
d]
0 5 10 15 20 25 3005
1015202530
Time [s]
Yaw
[µra
d]
Multi−DOFMulti−DOF (3.325 scaling)Renishaw
Figure 4.16: First iteration of an azimuthal rotational misalignment on Renishawsystem beamsplitters: 3.325 scaling factor is still valid between interferometers.

89
0 5 10 15 20 25 3005
1015202530
Time [s]
Yaw
[µra
d]
0 5 10 15 20 25 3005
1015202530
Time [s]
Yaw
[µra
d]
Multi−DOFMulti−DOF (3.325 scaling)Renishaw
Figure 4.17: Second iteration of an azimuthal rotational misalignment on Renishawsystem beamsplitters: 3.325 scaling factor is still valid between interferometers.
0 5 10 15 20 25−10−6−2
26
10
Time [s]
Yaw
[µra
d]
0 5 10 15 20 25−10−6−2
26
10
Time [s]
Yaw
[µra
d]
Multi−DOFMulti−DOF (3.325 scaling)Renishaw
Figure 4.18: Utilizing one focusing lens before the quadrant photodiode, the 3.325scaling factor is valid between interferometers for a sine wave.

90
0 5 10 15 20 25 30−2
0
2
4
6
Time [s]
Pitc
h [µ
rad]
0 5 10 15 20 25 30−2
0
2
4
6
Time [s]
Pitc
h [µ
rad]
Multi−DOFMulti−DOF (3.325 scaling)Renishaw
Figure 4.19: Still utilizing one focusing lens before the quadrant photodiode, pitchmeasurements agreed between interferometers with a 3.325 scaling factor as well.
0 5 10 15 20 25 30−2
0
2
4
6
Time [s]
Pitc
h [µ
rad]
0 5 10 15 20 25 30−2
0
2
4
6
Time [s]
Pitc
h [µ
rad]
Multi−DOFMulti−DOF (3.325 scaling)Renishaw
Figure 4.20: The Renishaw interferometer’s beamsplitters were subjected to anazimuthal rotational misalignment after the data from Figure 4.19 was taken. Theresult still obeys the 3.325 scaling factor between interferometers.

91
0 5 10 15 20 25
−2
0
2
4
Time [s]
Pitc
h [µ
rad]
0 5 10 15 20 25
−2
0
2
4
Time [s]
Pitc
h [µ
rad]
Multi−DOFMulti−DOF (3.325 scaling)Renishaw
Figure 4.21: The qualification measurements for a sine wave were consistent witha 3.325 scaling factor. These results still utilize a focusing lens and quadrantphotodiode location that is the same as that in the results of Figure 4.15.
Figures 4.15 through 4.21; however, the value of 3.325 seemed to be somewhat
arbitrary. A factor of 2 could have made sense given the interferometer fold factor
of 2 which is supposed to be incorporated into the conversion from phase to physical
displacement, but a factor of 3.325 did not make sense.
The eventual conclusion was that the scaling value of 3.325 had been correcting
for an imperfect wavefront (imperfect in that it was not flat). The method of
using a single focusing lens to overfill the quadrant photodiode was producing
interfering wavefronts with spherical shapes. Flat collimated wavefronts are desired
for consistent measurements; otherwise, a change in the distance of the quadrant
photodetector from the interferometer would theoretically produce different results
as the measured phase in all four quadrants would not be consistent. To test this
theory, the quadrant detector was moved closer to the focusing lens, and as expected,
the scaling factor changed. This result can be seen in Figures 4.22 and 4.23. The

92
interferometer was already set up to record pitch, so those measurements were used to
demonstrate the inconsistencies produced from a spherical wavefront. It is expected
that the same change in scaling factor under the same changing circumstances would
be seen in yaw as well.
0 5 10 15 20 25−2
0
2
4
Time [s]
Pitc
h [µ
rad]
0 5 10 15 20 25−2
0
2
4
Time [s]
Pitc
h [µ
rad]
Multi−DOFMulti−DOF (1.40 scaling)Renishaw
Figure 4.22: Still utilizing a single focusing lens, the location of the quadrantphotodetector was moved to prove that the focusing lens was producing a sphericalwavefront. This wavefront creates inconsistent pitch and yaw scaling factorsdepending on the location of the quadrant photodetector.
To correct for the errors associated with slightly spherical wavefronts on the
photodetector, the expanding lens was replaced with a two lens telescope which
expanded the beam at a 2:1 ratio to overfill the detector. The telescope produced a
much more collimated output than was seen with the single expanding lens. With
the implementation of the telescope, the data seen in Figures 4.24 through 4.26 are
produced, unfortunately with a fluctuating scaling factor again.
Measurements in Figure 4.24 were nominally close with no scaling; however, the
benchtop multi-DOF interferometer seemed to observe a linear increase in pitch while
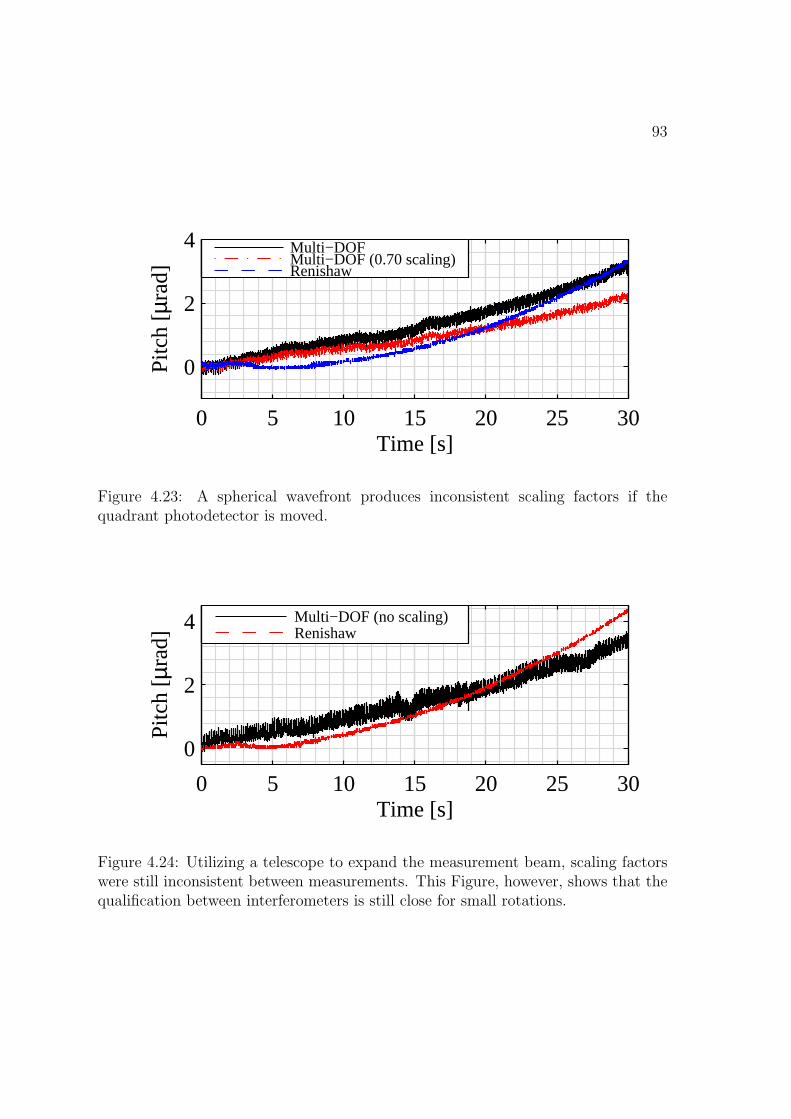
93
0 5 10 15 20 25 30
0
2
4
Time [s]
Pitc
h [µ
rad]
0 5 10 15 20 25 30
0
2
4
Time [s]
Pitc
h [µ
rad]
Multi−DOFMulti−DOF (0.70 scaling)Renishaw
Figure 4.23: A spherical wavefront produces inconsistent scaling factors if thequadrant photodetector is moved.
0 5 10 15 20 25 30
0
2
4
Time [s]
Pitc
h [µ
rad]
0 5 10 15 20 25 30
0
2
4
Time [s]
Pitc
h [µ
rad]
Multi−DOF (no scaling)Renishaw
Figure 4.24: Utilizing a telescope to expand the measurement beam, scaling factorswere still inconsistent between measurements. This Figure, however, shows that thequalification between interferometers is still close for small rotations.

94
0 5 10 15 20 25−2
0
2
4
6
Time [s]
Pitc
h [µ
rad]
0 5 10 15 20 25−2
0
2
4
6
Time [s]
Pitc
h [µ
rad]
Multi−DOFMulti−DOF (1.70 scaling)Renishaw
Figure 4.25: No components were touched between the measurements taken inFigure 4.24 and 4.25. The qualification between interferometers is close to within amicroradian without scaling.
0 5 10 15 20 25
4
12
20
28
Time [s]
Yaw
[µra
d]
0 5 10 15 20 25
4
12
20
28
Time [s]
Yaw
[µra
d]
Multi−DOFMulti−DOF (5.0 scaling)Renishaw
Figure 4.26: Scaling factor between interferometers using an expanding telescopeincreased to as high as 5.

95
the Renishaw system observed a quadratic increase. Corrections between trends of
different orders such as these can not be corrected using a single scaling factor.
Without touching either interferometer, pitch measurements were recorded over
a sine wave in which a 1.70 scaling factor was apparent (Figure 4.25). Finally,
the Renishaw system was completely disassembled and reassembled to record yaw
measurements, and an unprecedented scaling factor of 5 was observed (Figure 4.26).
These results do not create any discernable trajectory – as far as scaling factors
or corrections go – to arrive at a better agreement between interferometers. The
working prototype of the multi-DOF interferometer was being assembled in parallel
with the presented benchtop qualification measurements. Theoretically, the same
inconsistent scaling factor should be evident in the prototype qualification against
the Renishaw system, and those results are presented next.
4.2 Working Prototype Qualification
The assembled working prototype of the multi-DOF interferometer (discussed in
Chapter 3) was qualified against the RenishawML10 to test functionality. The results
of the benchtop qualification were obtained by displacing a small micro-positioning
stage (Physik Instrumente P-611.3S Nanocube®) through a normal translational
range of motion and the detected rotational errors were within the specifications of
the stage. For the prototype qualification, the Aerotech FiberMax® 5-axis servo
positioning stage was utilized for an additional check to ensure measurements were
valid. When a 0.01 yaw command was given to the FiberMax®, the Renishaw
system detected this range of motion extremely well; the multi-DOF working
prototype on the other hand, did not. This result builds on the findings from the

96
previous section in that the Renishaw system is now evidently more reliable than the
multi-DOF interferometer. Figure 4.27 shows three snapshots of the qualification
setup used to measure the FiberMax® stage from opposite ends.
Figure 4.27: The working prototype of the multi-DOF interferometer was qualifiedagainst the Renishaw ML10 using the Aerotech FiberMax® 5-axis servo positioningstage. Top Left: Overview of both systems measuring opposite ends of the stage.Bottom Left: The environmental containment system used to mitigate changesin refractive index. Right: The view from the multi-DOF working prototype inqualification measurements.
The results of a Z-displacement qualification were in close agreement between
interferometers. Prior to measurement, a CCD camera was attached to the
translating stage and the multi-DOF interferometer was aligned as well as possible
to the axis of stage displacement. The Renishaw system was also aligned to the

97
axis of displacement using the alignment fixtures provided with the interferometer.
This method of aligning using plastic inserts with the Renishaw system is not as
accurate as using a CCD array, however, this procedure was not performed in
benchtop qualification measurements and thus results are expected to be in closer
agreement. Results of a 45 mm ramp can be seen in Figure 4.28. The final
disagreement between interferometers reached as high as 329.1 µm. Although this
disagreement is discouraging, the final reading of the multi-DOF working prototype
was 44.6588 mm while the Renishaw ML10 read a 44.3297 mm final displacement.
Therefore, the multi-DOF interferometer was in closer agreement to the servo reading
of the FiberMax® which recorded a final displacement of 45.0000 mm.
0 5 10 15 20 25 30 35 400
10
20
30
40
Time [s]
Z−
Dis
plac
emen
t [m
m]
0 5 10 15 20 25 30 35 400
10
20
30
40
Time [s]
Z−
Dis
plac
emen
t [m
m]
Multi−DOF (no scaling)Renishaw
050100150200250300350400
Err
or [µ
m]
050100150200250300350400
Err
or [µ
m]
Error
Figure 4.28: 45 mm linear ramp qualification between the Renishaw ML10 andthe working prototype of the multi-DOF interferometer. The final displacementreading of the working prototype was 44.6588 mm while the Renishaw ML10 reada 44.3297 mm final displacement. The built in servo sensor of the measured stagerecorded a 45.0000 mm final displacement, thus, the multi-DOF interferometer wasin better agreement than the Renishaw ML10.

98
The stage was also run through a 0.01 range of motion (approximately 175 µrad)
to qualify yaw between interferometers. The results can be seen in Figure 4.29 in
which a scaling factor is still evident. Although the exact source of the scaling is not
known, the findings presented in the qualification of the benchtop system against the
Renishaw ML10 demonstrate a possible source of error from imperfect (or not flat)
interfering wavefronts. To test this theory, the quadrant photodiode was overfilled
at a ratio of 6:1 using a two lens system. Overfilling the detector in this fashion
ensures that only the center portions of both gaussian beams are detected, and thus
maintains that detected wavefronts are as flat as possible. The results can be seen
in Figure 4.30 in which the rotational sensitivity of the interferometer was greatly
reduced, presumably because so much information was discarded and not factored
into the weighted average.
0 5 10 15 20 25−180
−140
−100
−60
−20
20
Time [s]
Yaw
[µra
d]
0 5 10 15 20 25−180
−140
−100
−60
−20
20
Time [s]
Yaw
[µra
d]
Multi−DOFRenishaw
Figure 4.29: An inconsistent scaling factor persisted in yaw qualifications betweenthe multi-DOF working prototype and the Renishaw ML10.

99
0 5 10 15 20 25−180
−140
−100
−60
−20
20
Time [s]
Yaw
[µra
d]
0 5 10 15 20 25−180
−140
−100
−60
−20
20
Time [s]
Yaw
[µra
d]
Multi−DOFRenishaw
Figure 4.30: Overfilling the detector drastically reduces tip/tilt sensitivity. Thederived weighted average equation used to calculated pitch and yaw assumes flatwavefronts. Overfilling the detector maintains that the incident wavefronts areapproximately flat in that the detected irradiance is a result of the center ofinterfering gaussian beams.
4.3 Qualification Analysis
The inconsistencies in scaling factors between the Renishaw ML10 and the multi-
DOF interferometer are erratic. Despite this, progress was still made towards more
robust and reliable measurements. It is already evident that Z-displacements agree
relatively well between interferometers (Figures 4.12, 4.13 and 4.28). Furthermore, it
appears that under controlled conditions in which all components of the multi-DOF
interferometer are locked in place, measurements can be calibrated with a scaling
factor to achieve valid results (the 3.325 scaling factor in Figures 4.15 through 4.21).
The scaling factor of 3.325 seemed to be correcting for a spherical wavefront being
produced by the focusing lens in addition to any other sources of error.
In future work, the derivation used to arrive at the pitch and yaw weighted

100
average equations will need to be examined to ensure the rotational measurements it
yields are traceable to length and thus angle. More investigation into how pitch and
yaw are calculated is needed because it seems odd that Z-displacement qualifications
between interferometers are so exceptional while pitch and yaw qualifications are
inconsistent. The original expression presented by Muller, et al. [26] to determine
the intensity in one quadrant of a circular quadrant photodiode is
I1 = 2|E1E2|
∫ R
0
∫ π
4
−π
4
r(
e−2r
2
ω20
)
cos(βkr cos θ − ωt)dθdr, (4.1)
where β is the tilt angle between wavefronts and is less than 1, r and θ are cylindrical
coordinates on the quadrant photodiode’s surface and k = 2πλ. Since the quadrant
detector used for this research is square, Equation 4.1 needs to be converted to
Cartesian coordinates before being evaluated. The weighted average discussed in
Chapter 2 that is used to calculate pitch and yaw was also used by Schuldt, et al.
in the calculations used for the LISA project [6]. The integral given in Equation 4.1
will be reevaluated in future work to assess the validity of the weighted average for
the specific quadrant detector used in this research. In parallel with a background
investigation of this calculation, many more qualification measurements will need to
be recorded, especially with interferometers other than the Renishaw ML10.
As a complement to the work discussed in this thesis, Richard C.G.
Smith has provided a working analytic simulation for multi-DOF interferometer
measurements [31]. Preliminary simulation results demonstrate a scaling factor
dependence on detected beam diameter and possibly beam curvature. For small
yaw ranges of motion, as seen in Figure 4.29, his simulation produces a 1.2388
scaling factor for the multi-DOF interferometer. Implementing this scaling factor
into previously discussed results yields a close agreement between interferometers.

101
The implemented scaling factor can be seen in Figure 4.31.
0 5 10 15 20 25−180
−140
−100
−60
−20
20
Time [s]
Yaw
[µra
d]
0 5 10 15 20 25−180
−140
−100
−60
−20
20
Time [s]
Yaw
[µra
d]
Multi−DOFRenishawMulti−DOF (1.2388 scaling)
Figure 4.31: Preliminary analytical simulations of the multi-DOF interferometernaturally produce the scaling factor required for agreement between the RenishawML10 and the multi-DOF system.
The analytical simulation clearly has a lot of potential for reliable multi-DOF
interferometer measurements. The model is still being developed but seems to be on
the right path towards identifying the source of the inconsistent scaling factor.

102

103
5 Periodic Nonlinearity
The three main error sources that limit the performance of a displacement
interferometry system are the laser frequency stability [27], refractive index
fluctuations in non-common optical paths [4], and periodic nonlinearity in the
measured phase [16, 19, 28]. This chapter is mainly concerned with the third source
of error – periodic nonlinearity (or PNL for the remainder of this discussion).
Polarization encoded interferometers frequently exhibit PNL in which the resolution
of the interferometer is typically limited to 1-5 nanometers [16]; however, resolution
limits could potentially exceed 25 nm under severe system misalignments [18]. A
schematic of the effect of PNL on a linear ramp is shown in Figure 5.1. Ideally, what
an interferometer measures is linearly proportional to the physical displacement of the
target stage. However, under the effects of PNL, a nonlinearity with a periodicity of
one cycle per 2π change in optical path length is superimposed on top of the ideally
linear output. In its simplest principles and for all intents and purposes of this
discussion, PNL is a consequence of signal cross-talk between different frequencies
of linearly polarized beams. Although the discussion of PNL in this thesis will
concentrate primarily on its effect on heterodyne systems, it is important to note that

104
PNL can exist in homodyne interferometers as well [36–38]. Thus PNL is an effect
created as a consequence of using polarization encoded signals, not heterodyning.
Figure 5.1: A typical effect of periodic nonlinearity on a measured linear ramp.Periodic nonlinearity typically results in 1-5 nm of error, but there are techniqueswhich can be implemented to avoid this result. Axes are displayed in terms ofwavelength.
Periodic nonlinearity was first observed by Quenelle [16] and was soon after
demonstrated experimentally by Sutton [17] using the pressure scanning technique.
These two authors paved the way for the first full mathematical derivation of the
PNL phenomenon which was presented by Rosenbluth and Bobroff [20]. Their
derivation of optical sources of PNL was conducted using the heterodyne Michelson
interferometer very similar to the one shown in Figure 5.2. Many other authors have
theoretically evaluated sources of PNL [21, 28, 36, 39–41]. All of these theoretical
analyses have been conducted using the same Michelson setup (Figure 5.2); however,
DeFreitas and Player [28] have laid the foundation for examining sources of PNL in

105
setups that differ from the classical Michelson orientation. Their paper provides a
detailed analysis of the polarization effects which lead to PNL in addition to outlining
the derivation required to predict PNL in custom interferometer configurations using
Jones Calculus. Before discussing the PNL that was observed with the multi-DOF
interferometer, a detailed outline of the phenomenon pertaining to the Michelson
interferometer will be discussed.
5.1 The Michelson Interferometer
The primary source of error in this discussion of periodic nonlinearity is a result of
optical mixing. Optical mixing is further distinguished into two categories, namely
polarization mixing and frequency mixing, depending on the mechanism by which
the optical mixing was created [15]. These two sources of PNL both occur in the
simple heterodyne Michelson interferometer which has been previously discussed and
is shown in Figure 5.2.
Figure 5.2: The common heterodyne Michelson interferometer which is typicallysubjected to polarization mixing and frequency mixing.

106
In Figure 5.2, polarization mixing typically occurs before the linearly polarized
and mutually orthogonal beams at frequencies f1 and f2 enter the polarizing
beamsplitter. Polarization mixing is a result of a slight ellipticity of the two nominally
linearly polarized output states. Furthermore, the mutually orthogonal output
states are never perfectly orthogonal, which leads to additional polarization mixing.
Frequency mixing, on the other hand, occurs as the two beams pass through the
polarizing beamsplitter in Figure 5.2. Ideally, the polarizing beamsplitter splits both
polarization states so that one frequency is present in each arm of the interferometer.
In practice however, the separation of polarizations is imperfect, leading to a small
portion of an unwanted frequency component in each arm of the interferometer
(Figure 5.3). Both forms of optical mixing result in the interference of heterodyne
signals before it is desired. These effects can largely be avoided by spatially separating
polarization states and avoiding the use of polarizing optics [10], but those corrections
will be discussed in a later section of this chapter.
Figure 5.3: Interferometer showing optical mixing.

107
Other effects tend to create PNL in all displacement interferometry systems and are
not limited to the Michelson orientation. Optical misalignments can contribute to
the effect [18] as well as ghost reflections off normal surfaces [24]. To summarize all
potential PNL pitfalls, the primary sources of optical mixing include the following:
• Ellipticity of linearly polarized beams
• Optical misalignments within the system
• Imperfect beamsplitting optics
• Ghost reflections
• Non-orthogonality of linearly polarized incident beams
The Michelson interferometer has long been the industry standard in the field of
optical metrology due to its simplicity [12, 13]. The standard is changing, however,
in an effort to eliminate errors such as periodic nonlinearity which are tough to avoid
in the heterodyne Michelson configuration. Custom configurations have since been
developed that limit the chances of PNL; for examples, see references [9, 10, 24, 25].
The multi-DOF interferometer is one such interferometer which utilizes a spatially
separated launch and avoids using polarizing optics to reduce the chances of PNL.
A mathematical derivation of the multi-DOF interferometer’s PNL using Jones
Calculus is the subject of future work and can be performed using the outline
proposed by De Freitas and Player [28]. In the following section, however, a
theoretical derivation PNL within the Michelson setup is provided. The following
derivation has been appended from Bobroff [15] and Badami [42].

108
5.2 Theory
We refer to Figure 5.3 to observe the effects of optical mixing. The amplitudes
of the interferometer’s nominal signals are denoted by Am and Ar to represent the
measurement and reference arms, respectively. Unwanted frequency leakage into both
arms of the interferometer is designated by amplitudes αm and αr to denote leakage
signals into the measurement and reference arms, respectively. Although the ideal
interferometer has only two interfering signals, the actual output as a consequence
of optical mixing has four components. With this in mind, the resulting intensity
output at the measurement photodetector is proportional to
I ∝ |E|2 = |Ame−i(ω1t+∆φ1)+Are
−i(ω2t+∆φ2)+αme−i(ω2t+∆φ1)+αre
−i(ω1t+∆φ2)|2. (5.1)
We can expand Equation 5.1 to yield
I ∝ |E|2 = |Am|2 + |Ar|
2 + |αm|2 + |αr|
2
+ 2<
AmA∗
re−i(∆ωt+∆φ) + (Amα
∗
m + A∗
rαr)e−i(∆ωt)
+ α∗
mαre−i(∆ωt−∆φ) + (Amα
∗
r + A∗
rαm)ei(∆φ)
,
(5.2)
where an asterisk superscript represents the complex conjugate, ∆ω denotes the
angular split frequency of the interferometer and ∆φ represents changes in the optical
path difference between the reference and measurement arm of the interferometer.
This phase change, ∆φ, is related to the corresponding change in physical path length
by
∆φ =2πN∆x
λ, (5.3)

109
where N is the interferometer fold factor. In Equation 5.2 the |Am|2 + |Ar|
2 +
|αm|2 + |αr|
2 term represents a constant DC offset. The AmA∗
re−i(∆ωt+∆φ) portion
of the equation represents the nominal signal of the interferometer and the terms
(Amα∗
m + A∗
rαr)e−i(∆ωt) and α∗
mαre−i(∆ωt−∆φ) are the undesired mixing terms at the
split frequency, ∆ω, that cause periodic nonlinearity in the measured signal. Finally,
the (Amα∗
r + A∗
rαm)ei(∆φ) portion of the equation can be described as a homodyne
modulation term which is assumed to be near-DC. Using a bandpass filter, we can
remove the signal offset and homodyne modulation components to describe the AC
intensity variation at an arbitrary split frequency by
IAC ∝ <
(AmA∗
re−i∆φ + Amα
∗
m + A∗
rαr + α∗
mαrei∆φ)e−i∆ωt
. (5.4)
It is convenient to normalize all signals from Equation 5.4 to the nominal signal,
resulting in
IAC ∝ <
(Ω0e−i∆φ + Ω1 + Ω2e
i∆φ)AmA∗
re−i∆ωt
, (5.5)
where Ω0,Ω1 and Ω2 now represent amplitudes of interference terms relative to the
nominal AC signal,
Ω0 = 1
Ω1 =α∗
m
A∗
r
+αr
Am
Ω2 =α∗
mαr
AmA∗
r
.
(5.6)
If we now take the real part of Equation 5.5, we arrive at
IAC ∝ Ω0 cos(∆ωt+∆φ) + Ω1 cos(∆ωt) + Ω2 cos(∆ωt−∆φ), (5.7)

110
where the second and third terms of Equation 5.7 are sources of first and second
order periodic error, respectively. Equation 5.7 becomes the fundamental expression
which can be used to model periodic nonlinearity in the Michelson interferometer.
First order error is represented with the Ω1 amplitude and this will be assumed to be
the dominate source of periodic nonlinearity. A phasor diagram is a convenient way
to visualize how Equation 5.7 manifests itself as an oscillating signal superimposed
on top of the nominal change in phase. Equation 5.7 can be expanded into
quadratures using the sum and difference formulas of the cosine identity, i.e.
cos(A±B) = cos(A) cos(B)∓ sin(A) sin(B). The result yields
cos(∆ωt±∆φ) = cos(∆ωt) cos(∆φ)∓ sin(∆ωt) sin(∆φ). (5.8)
If we associate each quadrature – cos(∆ωt) and sin(∆ωt) – with the X and Y axes
of a Cartesian coordinate system, the phasor diagrams in Figure 5.4 are created
which represent the nominal signal (Figure 5.4a) and first-order periodic nonlinearity
(Figure 5.4b). It can be seen in Figure 5.4b that as the nominal measurement signal
tracks through a full 360 change in phase, the first order periodic error vector traces
through its own maximum and minimum relative to the origin. Second order periodic
error is not displayed; however, the effect of the second harmonic would simply be
an additional sinusoid superposition on top of the nominal signal which oscillates
through two full cycles during one period of the nominal phase measurement.

111
Figure 5.4: Phasor diagram representations of periodic nonlinearity (a) Nominalheterodyne signal with no mixing (b) First-order periodic nonlinearity.
5.3 Laboratory Data
Although the multi-DOF interferometer was designed so that it was theoretically
immune to PNL, the error still persisted. A variety of alternative sources of periodic
error were investigated, the first of which was the overall alignment sensitivity of the
interferometer. Badami and Patterson [18] have demonstrated the effects of optical
misalignments within the Michelson interferometer. In their work, the polarizing
beamsplitter within the Michelson setup was rotated through the azimuthal angle
relative to the axis of the measurement signal through the interferometer. At
nominal alignment, approximately 1 nm pk-pk of PNL was observed; however, as
the beamsplitter was rotated through a range of ±20 of misalignment, the error
was amplified to as high as 25 nm pk-pk of first order error. It was hypothesized
that a similar PNL error source existed with the mult-DOF interferometer, so the
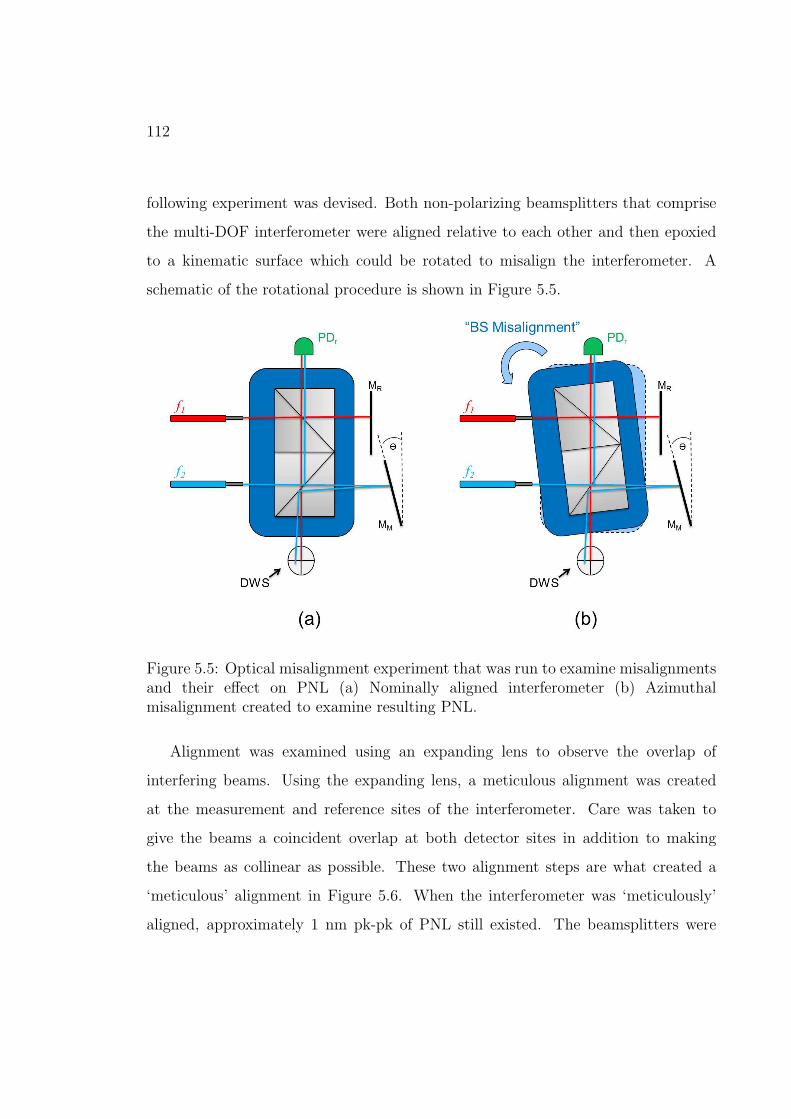
112
following experiment was devised. Both non-polarizing beamsplitters that comprise
the multi-DOF interferometer were aligned relative to each other and then epoxied
to a kinematic surface which could be rotated to misalign the interferometer. A
schematic of the rotational procedure is shown in Figure 5.5.
Figure 5.5: Optical misalignment experiment that was run to examine misalignmentsand their effect on PNL (a) Nominally aligned interferometer (b) Azimuthalmisalignment created to examine resulting PNL.
Alignment was examined using an expanding lens to observe the overlap of
interfering beams. Using the expanding lens, a meticulous alignment was created
at the measurement and reference sites of the interferometer. Care was taken to
give the beams a coincident overlap at both detector sites in addition to making
the beams as collinear as possible. These two alignment steps are what created a
‘meticulous’ alignment in Figure 5.6. When the interferometer was ‘meticulously’
aligned, approximately 1 nm pk-pk of PNL still existed. The beamsplitters were

113
then rotated to slightly misalign the system, which amplified the PNL.
0 2 4 6 8 10 12 14 16 18 20−10−7.5
−5−2.5
02.5
57.510
Fringe Number
Dis
p. E
rror
[nm
]
0 2 4 6 8 10 12 14 16 18 20−10−7.5
−5−2.5
02.5
57.510
Fringe Number
Dis
p. E
rror
[nm
] Nominal AlignmentMeticulous Alignment
Figure 5.6: Effect of slight misalignment on the multi-DOF interferometer. Refer toFigure 5.5 for a schematic of the created misalignment. Nominal alignment exhibitedapproximately 5 nm pk-pk PNL while meticulous alignment exhibited approximately1 nm pk-pk PNL.
It was expected that PNL would be amplified under azimuthal rotational
misalignments of the interferometer because this effect has been demonstrated in
the experiments conducted by Badami and Patterson [18]. What was not expected
was the 1 nm pk-pk of PNL which was still evident with a very meticulously aligned
system. A logical next step would be to examine the linear polarization quality of the
input beams. To do this, two linear polarizers were placed in front of each launch to
ensure that the polarization-maintaining fibers did not induce elliptical polarizations.
The setup shown in Figure 5.7 was implemented and the results of the experiment
can be seen in Figure 5.8.
Figure 5.8 shows that the resulting PNL, even with polarizers implemented,
reached 4 nm pk-pk in Z-displacement and 3 µrad pk-pk in rotational data. The

114
Figure 5.7: Linear polarizers were implemented into the interferometer to limit PNLas a result of elliptical polarizations.
0 1 2 3 4 5 6 7 8−4
−2
0
2
4
6
Fringe Number
Dis
p. E
rror
[nm
]
0 1 2 3 4 5 6 7 8−4
−2
0
2
4
6
Fringe Number
Dis
p. E
rror
[nm
]
Z−Displacement−8
−6
−4
−2
0
2
4
6∆
Rot
atio
n E
rror
[µra
d]
−8
−6
−4
−2
0
2
4
6∆
Rot
atio
n E
rror
[µra
d]YawPitch
Figure 5.8: PNL still existed with a polarizer after the launch site.

115
meticulous alignment experiment (Figure 5.6), established the standard for the lowest
achievable level of PNL up to this point. That meticulously aligned interferometer
had to be taken down and re-aligned before the polarizer experiment was run, so
the 4 nm pk-pk level of PNL in Z-displacement shown in Figure 5.8 can mainly be
attributed to very slight misalignments in the system. A slight ellipticity of the input
beams in a well aligned system has been shown to contirbute on the order of 1 nm pk-
pk of PNL [43]. Even if the ellipticity of the input beams had been contributing to
the levels of PNL, from these two experiments we know that misalignments in the
system are much more critical to maintaining high-resolution measurements than
very slight ellipticities of the input beams. In Figure 5.8, it could be inferred that
the dominant source of PNL was a result of slight misalignments in the system and
the polarization-maintaining fibers were not inducing considerable ellipticities in the
launch polarization states of the interferometer. These results were confirmed when
the interferometer was once again, very meticulously aligned and first order PNL
was reduced below detectable levels in Z-displacement. These results are shown in
Figure 5.9 in which first order PNL is not evident in Z-displacement. Z measurements
seem to exhibit second order PNL, if anything, and are on the order of 500 pm pk-
pk. Rotational PNL was on the order of 200 nm pk-pk in pitch and 400 nm pk-
pk in yaw. Although the lack of first order PNL is encouraging in Figure 5.9, it
is important to remember that Z-displacement in the multi-DOF interferometer is
actually an average of four separate phase measurements. With this in mind we refer
to Figure 5.10 in which picometer levels of PNL are evident in most quadrants, but
up to 1 nm pk-pk of first-order PNL can be seen in quadrant D.
The meticulously aligned interferometer which yielded the results shown in
Figures 5.9 and 5.10 is capable of yielding high resolution measurements with

116
0 1 2 3 4 50
0.5
1
1.5
Fringe Number
Dis
p. E
rror
[nm
]
0 1 2 3 4 50
0.5
1
1.5
Fringe Number
Dis
p. E
rror
[nm
] Displacement
0
0.5
1
1.5
∆ R
otat
ion
Err
or [µ
rad]
0
0.5
1
1.5
∆ R
otat
ion
Err
or [µ
rad]Yaw
Pitch
Figure 5.9: Periodic nonlinearity as a result of a very meticulously aligned system.Interferometer was re-aligned from the setup which produced the results in Figure 5.8in an attempt to completely eliminate PNL from misalignments.
0 1 2 3 4 501234567
Fringe Number
Dis
p. E
rror
[nm
]
0 1 2 3 4 501234567
Fringe Number
Dis
p. E
rror
[nm
]
Quadrant AQuadrant BQuadrant CQuadrant D
Figure 5.10: Although first order periodic nonlinearity was not evident in Z-displacement in Figure 5.9, the nonlinearity had only been averaged out from thefour quadrants of the measurement detector.

117
sub-microradian nonlinearity in rotation and sub-nanometer nonlinearity in Z-
displacement. A representative 50 µm pk-pk sine sweep was carried out to confirm
these levels of precision and is shown in Figure 5.11.
0 1 2 3 4 5−30
−15
0
15
30
Time [s]
Z−
Dis
plac
emen
t [µm
]
0 1 2 3 4 5−30
−15
0
15
30
Time [s]
Z−
Dis
plac
emen
t [µm
] Displacement
−8
−4
0
4
8
∆ R
otat
ion
[µrad
]
−8
−4
0
4
8
∆ R
otat
ion
[µrad
]
YawPitch
Figure 5.11: The interferometer under current resolution limits exhibits sub-microradian PNL in rotation and sub-nanometer PNL in Z-displacement.
It seems that we have reached the limit of how well we can align the system by
hand, yet PNL still persists. Furthermore, we have ruled out PNL resulting from
ellipticity in launch polarizations. Sub-nanometer levels of PNL have been attributed
to ghost reflections when no alternative dominate error source is evident [10, 24].
The remaining levels of PNL were attributed to ghost reflections as well. To test
this hypothesis, all sources that could potentially create ghost reflections must be
examined. Until now, all experiments had been carried out using FC/PC fiber
launches and are one source of ghost reflections. In addition, the interferometer
is comprised of two cube beamsplitters whose perpendicular surfaces could be a
considerable source of ghosting. The effect of ghost reflections was simulated using

118
a simplified model which assumes no sources of PNL on the reference detector.
The governing equation for this simulation (Equation 5.7) was derived from the
Michelson interferometer which is why the reference detector is assumed to be ideal.
Nonetheless, the simulation yielded a 1 nm pk-pk level of PNL as a result of ghost
reflections. A summary of the simulation can be seen in Appendix A. In practice, the
simulation is not completely valid for the multi-DOF interferometer because the same
nominal amplitude of ghost reflections is present in the reference and measurement
signals. Without an ideal reference, free of its own sources of PNL, the actual
simulation becomes much more complicated. Since the same nominal amplitude of
ghosting is present in the measurement and reference channels of the interferometer,
the effects could presumably cancel themselves out (when in phase) and would hence
yield sub-nanometer levels of PNL which are indeed present in Figure 5.10.
Experimentally, effects of ghosting were examined by replacing the cube
beamsplitters with plate beamsplitters which also had a 30 arcmin wedge specifically
designed to scatter ghost reflections. The interferometer aligned with wedge
beamplitters produced the results shown in Figure 5.12 in which 12 nm pk-pk of PNL
existed. These results were counterintuitive at first but have since been attributed
to misalignments within the system, which is much harder to align with the wedge
beamplitters compared to the cube beamsplitters.

119
0 1 2 3 4 5−10
−6
−2
2
6
10
Fringe Number
Dis
p. E
rror
[nm
]
0 1 2 3 4 5−10
−6
−2
2
6
10
Fringe Number
Dis
p. E
rror
[nm
] Displacement
−10
−5
0
5
10
∆ R
otat
ion
Err
or [µ
rad]
−10
−5
0
5
10
∆ R
otat
ion
Err
or [µ
rad]Yaw
Pitch
Figure 5.12: Interferometer measurement conducted using wedge beamsplitters toscatter ghost reflections. High levels of PNL are evident which are attributed tosystem misalignments.
5.4 Future Error Reduction
At the present state, approximately 500 pm pk-pk of periodic nonlinearity in
Z-displacement and 400 nm pk-pk of periodic nonlinearity in rotation are the
driving resolution limits of the interferometer. The source of this nonlinearity
has been attributed mainly to ghost reflections; however, it has also been shown
that PNL within the interferometer is very sensitive to slight misalignments
(Figure 5.6). Misalignment effects dominated the interferometer wedge beamsplitter
setup (Figure 5.12) which theoretically should have reduced PNL levels further from
what was examined in Figure 5.10. Going forward, a much more involved PNL
simulation as a result of ghost reflections, misalignments, and elliptical polarizations
all within a custom intererometer setup needs to be created to accurately model
the results obtained in the laboratory. DeFreitas and Player [28] have outlined a

120
convenient method of modeling PNL in custom interferometer setups using Jones
Calculus and a similar approach will need to applied to this interferometer. Cosijns,
et al. [43] have also established very reliable models which incorporate misalignments
and elliptical polarizations in the Michelson interferometer, and a similar approach
will need to be appended to the custom multi-DOF simulation.
The subject of periodic nonlinearity is vast within the displacement
interferometry industry. Although the subject is relatively well understood, its
effects in custom interferometer configurations will be very valuable as the state of
the industry starts to produce new setups in an effort to constantly push resolution
limits. Many commercial displacement measuring interferometers frequently state
a nonlinearity of 1 nm pk-pk. These resolution limitations are becoming obsolete
and have been exceeded by authors such as Joo, et al. [9] and Wu, et al. [24]. This
chapter merely serves as a brief introduction to periodic nonlinearity within the
specified setup, but this phenomenon could easily be investigated for quite some
time. As previously stated, the multi-DOF interferometer is theoretically periodic
error free. To successfully eliminate the phenomenon, an incredible amount of
care will need to put into aligning the interferometer in addition to the previously
suggested full simulation. Conveniently, sub-Rayleigh beam alignment methods have
already been demonstrated using a quadrant photodetector [26] which the multi-
DOF interferometer already contains. This alignment technique outlined by Muller,
et al. could be implemented into the multi-DOF interferometer to examine alignment
quality and further rule out PNL as a result of misalignments.

121
6 Conclusion
Ongoing work in the development of the multi-DOF interferometer has been
presented. As a culmination of this research, progress will be evaluated in addition to
outlining a trajectory for future work with this system. Measurements from a high-
resolution metrology instrument such as this interferometer are not complete without
a stated uncertainty. A brief error analysis has been conducted on the measurements
made for this thesis which will be presented first. Concluding remarks will outline
challenges in creating a completely fiber launched and detected interferometer in
addition to outlining other future system improvements.
6.1 Measurement Uncertainty
The methods used to evaluate the uncertainty associated with any particular
measurement are discussed in “A Beginner’s Guide to Uncertainty of Measurement”
provided by the National Physical Laboratory [44]. It is important to remember that
a particular instrument does not possess uncertainty, the individual measurements it
performs possess uncertainty. The analysis presented here is a result of the specific

122
conditions which exist in the laboratory where the measurements for this thesis were
conducted.
The measurement uncertainty derived for the multi-DOF interferometer is based
on the governing phase equation
∆φ =2πNη∆zf
c, (6.1)
where N is the interferometer fold factor (2 in the case of the multi-DOF design),
∆z is the change in physical displacement, η is the refractive index, f is the optical
frequency and c is the speed of light. After taking the time derivative of phase,
Equation 6.1 can be reorganized to observe a change in length. The time derivative
of phase is
d∆φ
dt=
2πN
c
(
ηfd∆z
dt+∆zη
df
dt+∆zf
dη
dt
)
. (6.2)
Since data analysis occurs on discrete time intervals, the dt term may be set to one
to simplify the equation. Equation 6.2 may then be rearranged to form an expression
for change in length, given by
∆z =c∆φ
2πNηf−
z∆f
f−
z∆η
η. (6.3)
Using Equation 6.3, a first order uncertainty expansion can be created using the
relationship
U2Y =
n∑
i=1
(∂Y
∂yi
)2
U2yi, (6.4)
where UY is the uncertainty, Y will be the function shown in Equation 6.3, yi are

123
uncertainty parameters from the equation, and Uyi is the uncertainty of those specific
uncertainty parameters. After inserting Equation 6.3 into Equation 6.4, the result
is six separate expressions from which the uncertainty can be analyzed individually.
The uncertainty contributions from individual components are
U∆z(∆φ) =c
2πNηf(U∆φ) ∼= 122.9 pm
U∆z(η) =( −∆φc
2πNη2f+
z∆η
η2
)
(Uη) ∼= 0 pm
U∆z(f) =( −∆φc
2πNf 2η+
z∆f
f 2
)
(Uf ) ∼= 0 pm
U∆z(∆f) =−z
f(U∆f ) ∼= 1.84 nm
U∆z(∆η) =−z
η(U∆η) ∼= 999.7 pm
U∆z(z) =(−∆f
f−
∆η
η
)
(Uz) ∼= 0 pm,
(6.5)
where the contributions from each term are a result of the input values shown in
Table 6.1.
Table 6.1: Uncertainty parameters for Equation 6.3 inserted into Equation 6.4.
Parameter Nominal Fractional AbsoluteValue Uncertainty Uncertainty
Speed of light (c) 299792458 m/s - -Fold factor (N) 2 - -Phase change (∆φ) 2.44 mrad - 2.44 mradRefractive index (η) 1.000275457 - 1 x 10−8
Change in ref. index (∆η) 4.88 x 10−7 - 1 x 10−8
Frequency (f) 473612214 MHz 1 x 10−8 -Frequency change (∆f) 4 MHz - 4+Uf MHzNominal length (z) 0.1 m - 100 nm
In Table 6.1, c and N are known. Phase change, ∆φ, was determined by

124
running a phase accuracy performance test on the SRS-830 lock-in amplifiers used
in the research for this thesis. This phase accuracy measurement is outlined in
the working manual for the lock-in amplifiers and yielded a phase accuracy value
of 2.44 mrad (which translates to 0.12 nm). The parameters needed to calculate
refractive index, η, accurately are temperature, pressure and relative humidity for
the modified Edlen equation [14] which has since been updated by Birch and Downs
[45, 46]. The laboratory in which this research was conducted typically operates in
a temperature of 20 ± 0.5C (rectangular distribution, k=1). Pressure and relative
humidity have been determined from a local weather database [47]. The pressure
used was 102.9 ± 0.2 kPa (rectangular distribution, k=1) and the relative humidity
was assumed a constant 67%; both of which are the nominal values for upstate
New York where these measurements were conducted. These values yielded the
nominal value of refractive index along with the change of refractive index from the
modified Edlen equation in Table 6.1. The resolution limit of the modified Edlen
equation is 1 part in 108 due to the resolution limits of the empirical data from
which it was derived. This 1 part in 108 resolution limit can be seen as the absolute
uncertainty in refractive index and the change in refractive index. The nominal value
for frequency in Table 6.1 is for red light from a He-Ne frequency stabilized source
and the corresponding uncertainty is readily available using commercial lasers. The
change in frequency was obtained from the specification sheet for the He-Ne laser used
for this research and represents stability over one hour. The absolute uncertainty of
the nominal target distance is 100 nm which is a conservative estimate considering
overall uncertainty is expected to be at least one order of magnitude lower than
that. Combining parameters from Equation 6.5 into a root-sum square calculation,
the uncertainty for a change in measured displacement is 2.10 nm. After imposing a
coverage factor of k=2, the overall uncertainty for a change in measured displacement

125
becomes 4.20 nm, providing a level of confidence of approximately 95%.
The stated uncertainty value of 4.20 nm is close to the resolution limits of
the multi-DOF interferometer given the amplitudes of periodic nonlinearity seen
throughout this thesis (typically 1-5 nm). As periodic nonlinearity levels continue
to decrease and the resolution of the interferometer increases, the measurement
uncertainty will need to be improved with better environmental containment and
better monitoring of refractive index.
6.2 Future System Improvements
An auxiliary research focus in the developoment of the multi-DOF interferometer
was to completely fiber-couple the system, that is, fiber launched and detected. In
the pursuit of this goal, a high density imaging fiber was purchased through Myriad
Fiber Imaging, Inc. (fiber type FIGH-50-1100N). Imaging bundles like this one had
been previously shown to transmit tilted wavefronts. Unfortunately when this fiber
was actually tested with the interferometer, it produced substantial levels of periodic
nonlinearity at the output compared to freespace detection. While the interferometer
was being qualified against the Renishaw ML10, the imaging fiber was inserted into
the setup. The resulting periodic nonlinearity can be seen in Figure 6.1.
High levels of periodic nonlinearity make the interferometer essentially useless in
qualification measurements. The data from Figure 6.1 was collected during a pitch
qualification against the Renishaw system. The actual attempted qualification can
be seen in Figure 6.2.
A lot of work obviously still needs to be done before the interferometer
can be completely fiber-coupled. While the reference signal can simply be

126
Figure 6.1: To completely fiber-couple the interferometer, an imaging fiber wasutilized to transmit tilted wavefronts to the quadrant photodiode. The result atthe output was 13 nm PNL in Z-displacement, 50 µrad PNL in pitch and 15 µradPNL in yaw.
transmitted through a multi-mode fiber, the measurement signal requires a much
more complicated waveguide which does not distort the tilt angle of interferring
wavefronts. The source of periodic nonlinearity within the fiber may be mode mixing
between individual fiber cores, as the imaging fiber is basically a high density fiber
bundle. Other fiber bundles will need to be examined for the measurement fiber
detection site. One such option is a simple quad fiber bundle which detects four
separate phase readings and transmits those signals to the four photodetectors on
the quadrant photodiode.
If fiber detection at the measurement site becomes viable, new applications open
up for the multi-DOF interferometer. One such product could be a fiber probe
incorporated onto a 5-axis coordinate measurement machine (or CMM). The fiber
probe would be extremely useful in the metrology of freeform optics which sometimes

127
0 5 10 15 20 25 30−40
−20
0
20
40
Time [s]
Pitc
h [µ
rad]
0 5 10 15 20 25 30−40
−20
0
20
40
Time [s]
Pitc
h [µ
rad]
Multi−DOF (Fiber Detected)Renishaw
Figure 6.2: Fiber detection qualification of the interferometer against the RenishawML10. High levels of periodic nonlinearity created through the imaging fiberwhile transmitting the measurement interference signal yielded essentially uselessqualification results.
exhibits fringe contrast issues with current white light techniques in addition to small
aperture measurement limits. A completely fiber-coupled multi-DOF interferometer
could be incorporated onto a 5-axis CMM and, with the implementation of feedback
control, would be able to sweep over freeform surfaces. A displacement interferometer
would be ideal for this type of optical probe due to its fine resolution limits in addition
to a high dynamic range. Figure 6.3 demonstrates the multi-DOF interferometer
being used as an optical probe sweeping over a freeform surface.

128
Figure 6.3: A fiber-fed and fiber-detected multi-DOF interferometer could beincorporated into a 5-axis coordinate measurement machine to be used as an opticalprobe. With the implementation of feedback control, the fiber probe would be ableto sweep across freeform surfaces.
6.3 Final Remarks
The multi-DOF interferometer being used as a fiber probe is contingent on a
compact design. The working prototype discussed in Chapter 3 already has a
relatively small profile compared to many commercial systems. However, if this
interferometer becomes smaller, alignment of the beamsplitting optics will become
increasingly difficult. Assembling the working prototype of the interferometer is
already challenging enough with such small optical components. The design of a
reliable industrial assembly process would prove useful for the current setup as well
as in future smaller iterations.
The continued research and development of the multi-DOF interferometer
requires a multi-disciplinary approach. Before the interferometer can be used for

129
metrology in the optical lithography industry, the resolution of the interferometer
will need to be below 1 nanometer in Z-displacement, and will probably need to
be on the order of 10s of nanoradians in pitch and yaw. Towards this end, custom
phase detection electronics will need to be developed with a low noise floor and the
environment where measurements are taken will need to be extremely well monitored
and probably in vacuum. Also, the amplitude of periodic nonlinearity will need to
be significantly reduced – hopefully to undetectable levels. This Master’s thesis has
laid the foundation for the theory and predominant considerations needed in the
continued improvement of the system. Displacement interferometry measurement
theory, precision design principles, and a critical evaluation of all presented results
have provided a path forward in the advancement of the multi-DOF interferometer.

130

131
Bibliography
[1] P. Hariharan. Optical Interferometry. Academic Press, 2003.
[2] S.J. Bennett. Length and displacement measurement by laser interferometry.
Optical Transducers and Techniques in Engineering Measurement, pages 135–
159, 1983.
[3] C.R. Steinmetz. Sub-micron position measurement and control on precision
machine tools with laser interferometry. Precision Engineering, 12(1):12–24,
1990.
[4] W.T. Estler. High-accuracy displacement interferometry in air. Applied Optics,
24(6):808–815, 1985.
[5] W.H. Steel. Interferometry. Cambridge University Press, 1983.
[6] T. Schuldt, M. Gohlke, D. Weise, U. Johann, A. Peters, and C. Braxmaier.
Picometer and nanoradian optical heterodyne interferometry for translation and
tilt metrology of the lisa gravitational reference sensor. Classical and Quantum
Gravity, 26(8), 2009.
[7] J.J. Kroll. Six degree of freedom optical sensor for dynamic measurement of
linear axes. PhD thesis, University of North Carolina, Charlotte, 2003.

132
[8] P.S. Huang J. Ni and S.M. Wu. A multi-degree-of-freedom measuring system
for CMM geometric errors. Journal of Engineering for Industry, 114:362–369,
1992.
[9] K-N. Joo, J.D. Ellis, E.S. Buice, J.W. Spronck, and R.H. Munnig Schmidt. High
resolution heterodyne interferometer without detectable periodic nonlinearity.
Optics Express, 18(2):1159–1165, 2010.
[10] K-N. Joo, J.D. Ellis, J.W. Spronck, P.J.M. van Kan, and R.H. Minnig Schmidt.
Simple heterodyne laser interferometer with subnanometer periodic errors.
Optics Letters, 34(3):386–388, 2009.
[11] J.D. Ellis, A.J.H. Meskers, J.W. Spronck, and R.H. Munnig Schmidt. Fiber-
coupled displacement interferometry without periodic nonlinearity. Optics
Letters, 36:3584–3586, 2011.
[12] A. Michelson and R. Benoit. Determination experimentale de la valcur du metre
en longueurs d’ondes lumineuses. Trav. Et Mem. Bur. Int. Poids et Mes., 1:1–83,
1895.
[13] L.M. Barker and R.E. Hollenbach. Interferometer technique for measuring the
dynamic mechanical properties of materials. American Institute of Physics:
Review of Scientific Instruments, 36:1617–1620, 1965.
[14] B. Edlen. The refractive index of air. Metrologia, 2(2):71–80, 1966.
[15] N. Bobroff. Residual errors in laser interferometry from air turbulence and
nonlinearity. Applied Optics, 26(13):2676–2682, 1987.
[16] R. Quenelle. Nonlinearity in interferometer measurements. Hewlett-Packard
Journal, 34(4):10, 1983.

133
[17] C.M. Sutton. Non-linearity in length measurement using heterodyne laser
michelson interferometry. Journal of Physics E: Scientific Instruments,
20(10):1290–1292, 1987.
[18] V.G. Badami and S.R. Patterson. A frequency domain method for
the measurement of nonlinearity in heterodyne interferometry. Precision
Engineering, 24(1):41–49, 2000.
[19] W. Hou and G. Wilkening. Investigation and compensation of the nonlinearity
of heterodyne interferometers. Precision Engineering, 14(2):91–98, 1992.
[20] A.E. Rosenbluth and N. Bobroff. Optical sources of nonlinearity in heterodyne
interferometers. Precision Engineering, 12(1):7–11, 1990.
[21] W. Augustyn and P. Davis. An analysis of polarization mixing errors in distance
measuring interferometers. Journal of Vacuum Science and Technology B,
8(6):2032–2036, 1990.
[22] M. Tanaka, T. Yamagami, and K. Nakayama. Linear interpolation of periodic
error in a heterodyne laser interferometer at subnanometer levels. IEEE
Transactions on Instrumentation and Measurement, 38(2):552–554, 1989.
[23] J. Lawall and E. Kessler. Michelson interferometry with 10 pm accuracy.
American Institute of Physics, 71(7):2669–2676, 2000.
[24] C-M. Wu, J. Lawall, and R.D. Deslattes. Heterodyne interferometer with
subatomic periodic nonlinearity. Applied Optics, 38(19):4089–4094, 1999.
[25] T. Schmitz and J. Beckwith. Acousto-optic displacement-measuring
interferometer: a new heterodyne interferometer with Angstrom-level periodic
error. Journal of Modern Optics, 49(13):2105–2114, 2002.

134
[26] H. Muller, S-W. Chiow, Q. Long, C. Vo, and S. Chu. Active sub-rayleigh
alignment of parallel or antiparallel laser beams. Optics Letters, 30(24):3323–
3325, 2005.
[27] N. Bobroff. Recent advances in displacement measuring interferometry.
Measurement Science and Technology, 4:907–926, 1993.
[28] J.M. De Freitas and M.A. Player. Polarization effects in heterodyne
interferometry. Journal of Modern Optics, 42(9):1875–1899, 1995.
[29] N.A. Massie, R.D. Nelson, and S. Holly. High-performance real-time heterodyne
interferometry. Applied Optics, 18(11):1797–1803, 1979.
[30] G.E. Sommargren. Optical heterodyne profilometry. Applied Optics, 20(4):610–
618, 1981.
[31] R.C.G. Smith. Fiber effects in displacement interferometry. Master’s thesis,
University of Rochester, Unpublished manuscript.
[32] E. Morrison, B.J. Meers, D.I. Robertson, and H. Ward. Automatic alignment
of optical interferometers. Applied Optics, 33(22):5041–5049, 1994.
[33] S.R. Gillmer, R.G.C. Smith, S.C. Woody, J. Tarbutton, and J.D. Ellis.
Miniature, fiber-coupled 3-DOF interferometer for precision micro-motion stage
metrology. In Proceedings of the 27th ASPE Annual Meeting, San Diego, CA,
21-26 October 2012.
[34] J.E. Furse. Kinematic design of fine mechanisms in instruments. Journal of
Physics E: Scientific Instruments, 14(3):264–271, 1981.

135
[35] C-m. Wu. Periodic nonlinearity resulting from ghost reflections in heterodyne
interferometry. Optics Communications, 215(1-3):17–23, 2003.
[36] C-M. Wu and C-S. Su. Nonlinearity in measurements of length by optical
interferometry. Measurement Science and Technology, 7(1):62–68, 1996.
[37] F. Petru and O. Cıp. Problems regarding linearity of data of a laser
interferometer with a single-frequency laser. Precision Engineering, 23(1):39–50,
1999.
[38] P.L.M. Heydemann. Determination and correction of quadrature fringe
measurement errors in interferometers. Applied Optics, 20(19):3382–3384, 1981.
[39] Y. Xie and Y-Z. Wu. Zeeman laser interferometer errors for high-precision
measurements. Applied Optics, 31(7):881–884, 1992.
[40] J.M. DeFreitas and M.A. Player. Importance of rotational beam alignment in
the generation of second harmonic errors in laser heterodyne interferometry.
Measurement Science and Technology, 4(10):1173–1176, 1993.
[41] B. Li and J-W. Liang. Effects of polarization mixing on the dual-wavelength
heterodyne interferometer. Applied Optics, 36(16):3668–3672, 1997.
[42] V.G. Badami. Investigation and compensation of periodic nonlinearities in
heterodyne interferometry. PhD thesis, University of North Carolina, Charlotte,
1999.
[43] S.J.A.G. Cosijns, H. Haitjema, and P.H.J. Schellekens. Modeling and
verifying non-linearities in heterodyne displacement interferometry. Precision
Engineering, 26:448–455, 2002.

136
[44] S. Bell. A Beginner’s Guide to Uncertainty of Measurement. National Physical
Laboratory, Teddington, Middlesex, United Kingdom, 1999.
[45] K.P. Birch and M.J. Downs. An updated edlen equation for the refractive index
of air. Metrologia, 30(3):155–162, 1993.
[46] K.P. Birch and M.J. Downs. Correction to the updated edlen equation for the
refractive index of air. Metrologia, 31(4):315–316, 1994.
[47] New york current condition maps, 2013: http://www.usairnet.com/weather/maps/current/new-
york/.

137
A Simulating Periodic
Nonlinearity
FRED optical analysis software was used to generate a working model of the
multi-DOF displacement interferometer. The generated model is shown next which
accounts for ghost reflections off all surfaces
After a working simulation was created, amplitudes of ghost reflections had to be
examined to generate a Ω1 coefficient from Equation 5.7. The amplitudes of ghost
reflections relative to the nominal signal were created utilizing a strategic placement
of 100% absorbing surfaces in FRED. This was done in two steps; first, the setup
shown in Figure A.2 was run with 0.1% reflections on each optical surface, 90%
reflection on both mirrors (MM andMR), and 100% absorbance at both fiber launches
assuming an APC fiber launch is implemented to scatter ghost reflections from fiber
tips. This initial step was used as a control scenario to observe the magnitude of
the irradiance output on the measurement photodetector (PDM). The irradiance
output from the setup in Figure A.2 is shown in Figure A.3.
The control scenario yielded an integrated power over the entire analysis detector
surface of 40.24 µW, it is now our task to figure out what percentage of that power
is generated from ghost reflections. The dimensionless coefficient that represents

138
Figure A.1: Screen shot of the multi-DOF interferometer modeled using FREDoptical software.
Figure A.2: Schematic of initial multi-DOF interferometer used in the FREDsimulation.

139
Figure A.3: Control scenario, setup in Figure A.2 modeled using 0.1% reflectionson each optical surface, 90% reflection on both mirrors (MM and MR), and 100%absorbance at both fiber launches assuming an APC fiber launch is implemented toscatter ghost reflections from fiber tips. Integrated Power is 40.24 µW.

140
that percentage of ghost reflections becomes the Ω1 coefficient from Equation 5.7.
To examine pure ghost reflections at the measurement detector, the setup shown in
Figure A.4 was implemented.
Figure A.4: FRED simulation schematic to observe amplitude of ghost reflectionsrelative to nominal signal.
The irradiance output in Figure A.5 was generated using the setup in Figure A.4.
It should be noted that the Ω1 coefficient from Equation 5.6 contains two sources of
PNL – one from the frequency leakage into the reference arm of the previously shown
Michelson interferometer and one from the frequency leakage into the measurement
arm. Both terms from the Ω1 coefficient are detected at the measurement
photodetector in Figure 5.3. For the purposes of our multi-DOF interferometer
setup, only ghost reflections from the measurement beam (red) in Figure A.4 are
significant because most of the ghost reflections from the reference beam (blue)
are detected on the reference photodetector. With this reasoning in mind, the Ω1
coefficient from Equation 5.6 now only contains one term which is the ratio of the
irradiance output from Figure A.5 over the irradiance output from Figure A.3. This

141
Figure A.5: Analysis of ghost reflections using the setup in Figure A.4. IntegratedPower = 0.1858 µW.
ratio (0.1858 µW/40.24 µW) is equal to 0.00462. Using this coefficient, a MATLAB
simulation was run with an overall displacement of 15 fringes (at 633 nm wavelength).
The measured phase incorporates the Ω1 coefficient of 0.00462 using the following
expression [24]:
Φ(t)meas = tan−1
( 12sin(φ)
12cos(φ) + Ω1
)
(A.1)
Measured phase is calculated from Equation A.1, unwrapped, detrended and
converted to physical displacement to arrive at the result shown in Figure A.6 and
a nominal PNL of 1 nm pk-pk.

142
0 1 2 3 4 5 6 7 8 9 10−0.5
−0.25
0
0.25
0.5
Fringes
Dis
plac
emen
t [nm
]
0 1 2 3 4 5 6 7 8 9 10−0.5
−0.25
0
0.25
0.5
Fringes
Dis
plac
emen
t [nm
]
Simulated PNL
Figure A.6: Periodic Nonlinearity simulation resulting from ghost reflections on themeasurement detector using the setup shown in Figure A.4. Nominal PNL 1 nmpk-pk.
Related Documents