DEVELOPMENT AND INNOVATION OF FIRE FIGHTING ROBOT USING INTELLIGENT MULTIPLE SENSORS PART A: HARDWARE DEVELOPMENT PART B: SENSIBLE DEVICE DEVELOPMENT PART C: SOFTWARE DEVELOPMENT FYP Electronics Engineering Candidate: ASHRAFF BIN KAHARUDDIN (51211111083) PART A NURUL ARIF BIN MOHAMAD (51211111336) PART B MUHAMMAD YUSUFF BIN MD. RIDZUAN (51211111258) PART C SUPERVISOR: Dr. ZAINUDIN BIN KORNAIN 2012 Final Year Project 1 University Kuala Lumpur British Malaysian Institute

DEVELOPMENT AND INNOVATION OF FIRE FIGHTING ROBOT USING INTELLIGENT MULTIPLE SENSORS PART A: HARDWARE DEVELOPMENT PART B: SENSIBLE DEVICE DEVELOPMENT PART.
Dec 18, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
DEVELOPMENT AND INNOVATION OF FIRE FIGHTING ROBOT USING INTELLIGENT MULTIPLE SENSORS
PART A: HARDWARE DEVELOPMENTPART B: SENSIBLE DEVICE DEVELOPMENT
PART C: SOFTWARE DEVELOPMENT
FYP Electronics Engineering Candidate:ASHRAFF BIN KAHARUDDIN (51211111083) PART ANURUL ARIF BIN MOHAMAD (51211111336) PART B
MUHAMMAD YUSUFF BIN MD. RIDZUAN (51211111258) PART C
SUPERVISOR:Dr. ZAINUDIN BIN KORNAIN
2012 Final Year Project 1 University Kuala Lumpur British Malaysian Institute

Presentation Contenti. abstractii. objectiveiii. Introductioniv. Problem Statementv. Literature Reviewvi. Methodologyvii.Conclusionsviii.References

ABSTRACT
• Fire fighting robot is a newly developed design where its function is to reduce the fire fighter risk in the dangerous situations
This project is propose the fire-fighting robot using multiple sensor to detect the fire and extinguish the flame.
The microcontroller PIC 16f877A use to control the operation of the robot.
Two sensor which are distance sensor and flame sensor used to detect flame and avoiding the robot from the fire with predetermined distance.

OBJECTIVE• The objective of this project are divided into 3 parts:
PART A:I.To innovate the robot communicate using voice commandII.To choice the right component for robot III.To apply android application on the robotIV.To design the fire detection system using two flame sensor which is programmed for fire detection
PART B:I.To design the fire detection system using two flame sensor which is programmed for fire detection using sensor based methodII.To develop distance detection in avoiding hitting the wall and approaching the flame
PART C:I.To verify overall operation of whole system using lab view softwareII.To study how to combine all application that we use in one microcontroller

Introduction
• A fireman jobs is to extinguish the fires also to prevent destruction of life, property and the environment.
• Figure 1 shows that the fireman also used fire engine tools and equipments to extinguish fire.
Figure 1: Fire engine
• In this project, we are designing the fire detection system using two flame sensor which is programmed for fire detection using sensor based method.
• To extinguish the fire source, our robot will use fire extinguish and the robot could be controlled by remote and voice command using Android application.
• To complete the project, we are divided into 3 parts ; Part A will be conducted by Ashraff, Part B will be conducted by
Arif and Part C will be conducted by Yusuff.
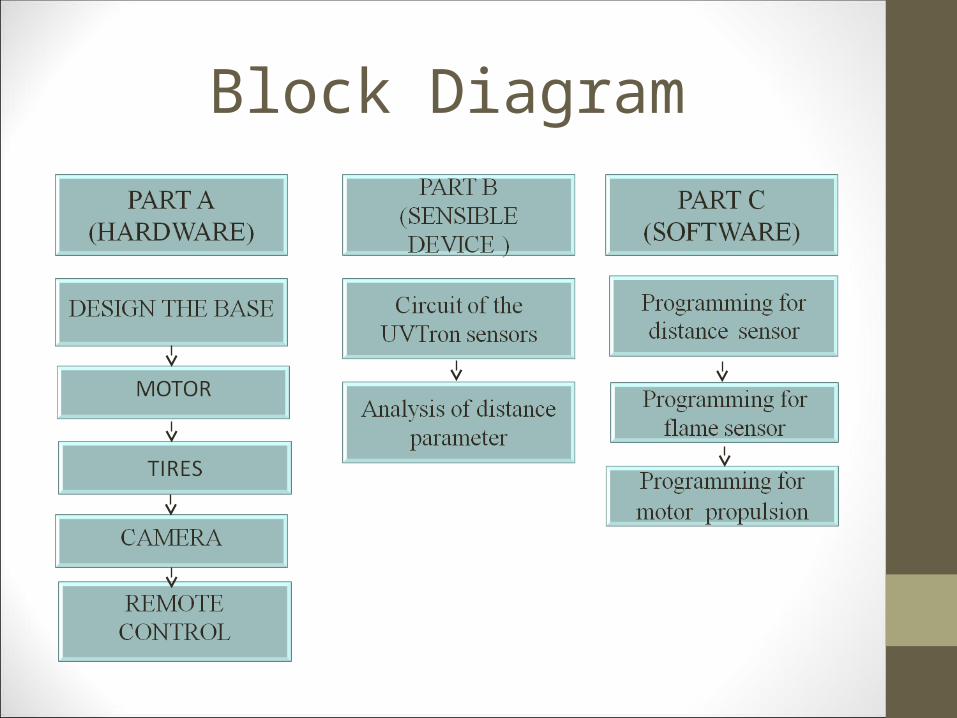
Block Diagram
Problem statement
• Fire fighter is a dangerous job and a lot of brave men are dying every year. To save lives , a fire-fighting robot should take its place. Send a robot in if a building is going to collapse or think of big chemical fires with a lot of heat and not so healthy gases and the danger of explosions or small spaces.
• Fire fighter also have to do so may job:• Rescue • Fire drill • Disaster • Accident

Statistic from Malaysian Fire Department and Rescue
LITERATURE REVIEW
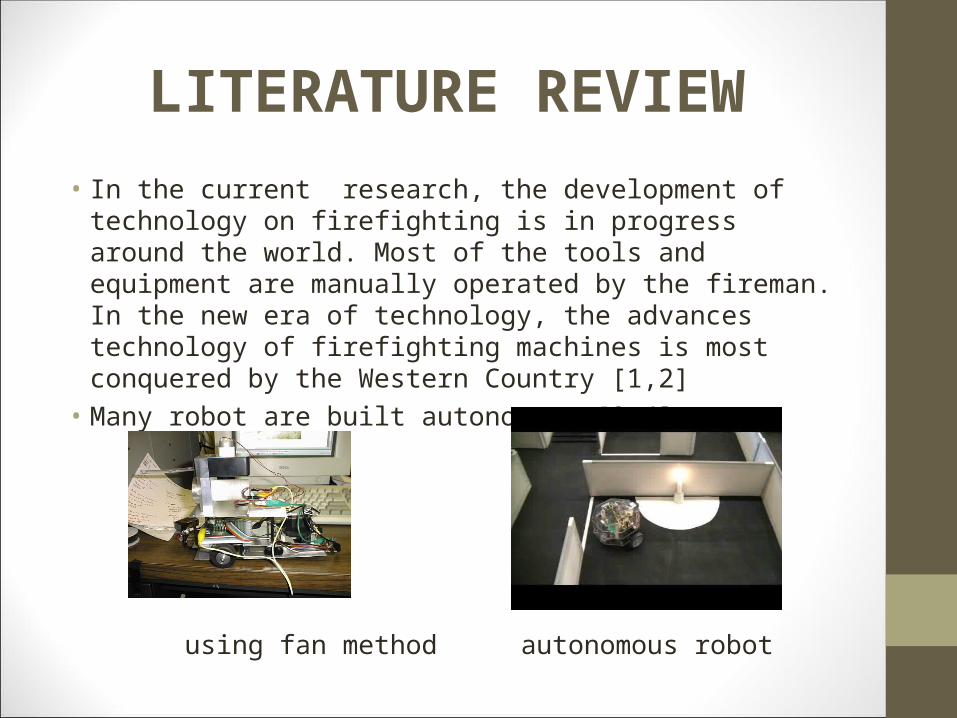
• In the current research, the development of technology on firefighting is in progress around the world. Most of the tools and equipment are manually operated by the fireman. In the new era of technology, the advances technology of firefighting machines is most conquered by the Western Country [1,2]
• Many robot are built autonomous [3,4].
using fan method autonomous robot
DISADVANTAGES OF THIS ROBOT
• Using fan method • Cannot extinguish the big fire • spread the fire
• autonomous robot• Not suitable for open space or open area • Slow to reach and turn of the fire

INNOVATION OUR PROJECT • The innovation has been made in my project which is we use :
• navigation system• We can remotely monitoring and controlling the robot
• voice recognition system• Use android application to control the robot using voice
• Using fire extinguisher tank• Using this method to extinguish the fire• Suitable to all types of fire

METHODOLOGY
Part A:Design of base Triangle Design Square Design
Figure 2: Design Of The Robot
• DC BRUSHLESS MOTOR• Suitable for robotcon and heavy duty • Using power supplier DC 24V
• RUBBER TYRE • Give more tyre grip to hadle the fire extinguisher pressure
• FIRE EXTINGUISHER• Method to turn off the fire• Type A suitable to all type fire • Easy for maintenance
• MICROCONTROLLER PIC 16f877A • Control all the robot process
• DISTANCE SENSOR AND FLAME SENSOR o To protect robot from fire

METHODOLOGY
Figure 4: operational of programming
Robot cannot move
Robot can move
yes
No
Yes
No
METHODOLOGY
TASK NAME OGOS SEPTEMBER OCTOBER NOVEMBER
Week 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Choose a project title
Study how to make a good proposal
Submit the draft of proposal
Public Holiday
Modify the draft proposal
Research and identify required components -sensor
-hardware -programming
Phase Test
Midterm Break
Submit the research idea to advisor for consultation
Design the project component
Simulate and troubleshooting
Present the actual design to advisor
Preparation for presentation FYP 1
Presentation session FYP 1
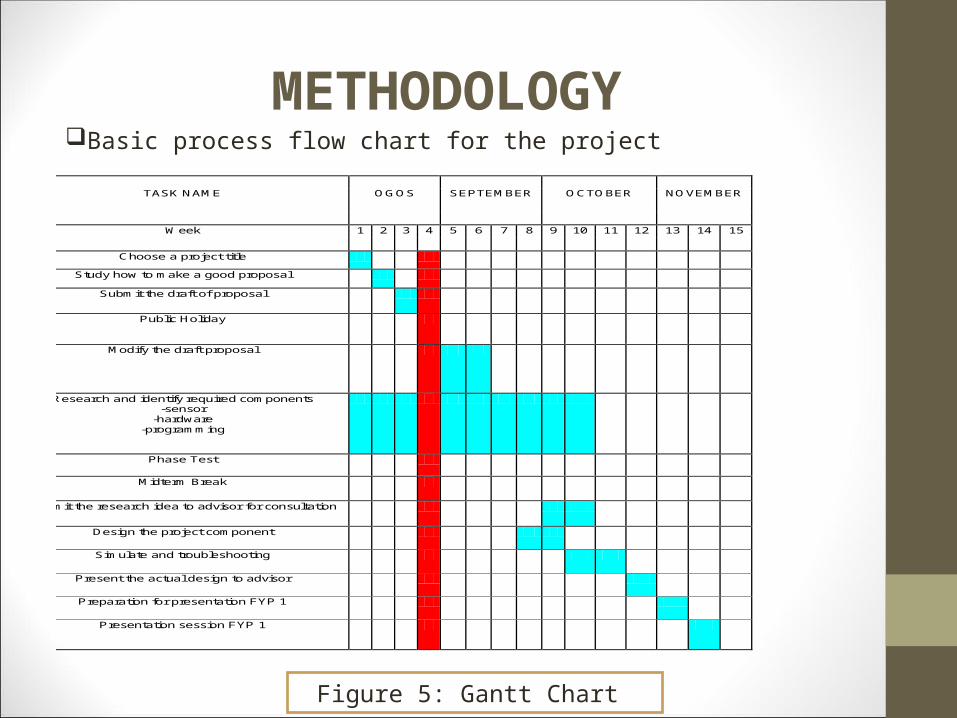
Basic process flow chart for the project
Figure 5: Gantt Chart

Flow chart
Part A:
TECHOLOGY USED• Microcontroller PIC PIC16F877A• Distance sensor • Flame sensor • Wireless camera • RC remote control • MPLAB-IDE software • Android application software • LABVIEW software
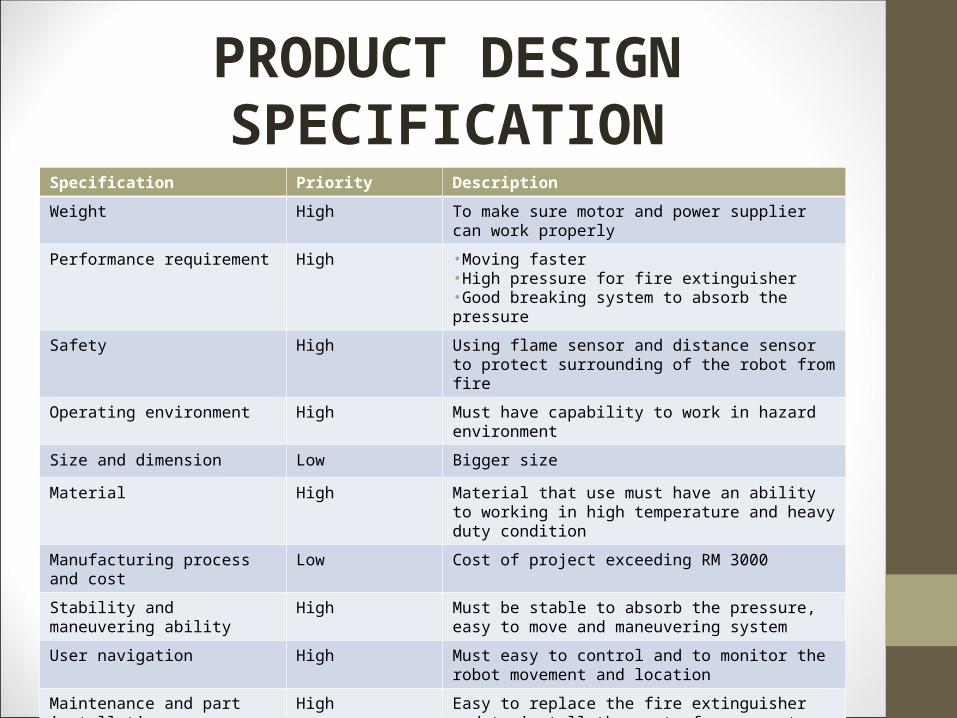
PRODUCT DESIGN SPECIFICATION
Specification Priority Description
Weight High To make sure motor and power supplier can work properly
Performance requirement High •Moving faster •High pressure for fire extinguisher •Good breaking system to absorb the pressure
Safety High Using flame sensor and distance sensor to protect surrounding of the robot from fire
Operating environment High Must have capability to work in hazard environment
Size and dimension Low Bigger size
Material High Material that use must have an ability to working in high temperature and heavy duty condition
Manufacturing process and cost Low Cost of project exceeding RM 3000
Stability and maneuvering ability High Must be stable to absorb the pressure, easy to move and maneuvering system
User navigation High Must easy to control and to monitor the robot movement and location
Maintenance and part installation High Easy to replace the fire extinguisher and to install the part of component

BENEFIT • IMPACT ON COMMUNITY• To expose the community about new technology • To ceate more better life for community • Encourage everyone to innovate new technology
• IMPACT ON FIRE DEPARTMENT
• Protect fireman from risk they life• Provide facility to fire station to extinguish the fire

COMMERCIALIZATION • Suitable for:
• Fire department • Factory • High explosion area• chemical industrial • Petrol station

Conclusions
• In order to make the robot performs the desired task, a programming development will be executed and to achieve the objective of the project successfully.
• This project will be more focused on the construction of electronic circuit which uses a PIC microcontroller to control the motion of the robot
References[1] J. Borenstein and Y. Iioren (1988) ”Obstacle avoidance with ultrasonic sensors IEEE Journal of Robotics and Automadion, pp.213, [2] Bradshaw, (1991) "The UK Security and Fire Fighting Advanced Robot project," IEEE Colloquium on Advanced Robotic Initiatives in the UK, pp. 1/1-1/4.[3] L. E. Parker, B. A. Emmons, "Cooperative multi-robot observation of multiple moving targets,"Proceedings of the IEEE International Conference on Robotics and Automation,, vol.3, 1997, pp.2082-2089.[4] H. Kobayashi, M. Yanagida, (1995),"Moving object detection by an autonomous guard robot,"Proceedings of the 4th IEEE International Workshop on Robot and Human Communication, TOKYO, pp.323-326.
Related Documents