DESIGN OPTIMIZATION STUDY ON A CONTAINERSHIP PROPULSION SYSTEM Brian Cuneo Thomas McKenney Morgan Parker ME 555 Final Report April 19, 2010 ABSTRACT This study develops an optimization algorithm to explore the tradeoff between fuel consumption and engine room volume of a direct drive containership. Standard regression formulas, first principles analysis and new regression formulas from published manufacturer data are used to formulate a model. This model is constrained by the data used in the individual regression formulas, physical constraints and manufacturing capabilities. Each of the subsystems of the total algorithm, hull, propeller and engine are validated and tested independently to demonstrate feasible solutions. The combined system uses a sequential approach, hull-propeller-engine, exchanging vectors of interacting variables to produce an integrated Pareto front between fuel consumption and engine room volume. A test case is run through the algorithm and the results are examined. With additional data pertaining to routes, fuel prices and cargo rates, a ship designer could implement this model to find an optimal propulsion system solution for a given ship speed and displacement. This solution would be subject to scrutiny if the optimum lies on the subsystem model constraint boundaries, implying different regression models are required.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

DESIGN OPTIMIZATION STUDY ON
A CONTAINERSHIP PROPULSION SYSTEM
Brian Cuneo
Thomas McKenney
Morgan Parker
ME 555 Final Report
April 19, 2010
ABSTRACT
This study develops an optimization algorithm to explore the tradeoff between fuel consumption and
engine room volume of a direct drive containership. Standard regression formulas, first principles
analysis and new regression formulas from published manufacturer data are used to formulate a model.
This model is constrained by the data used in the individual regression formulas, physical constraints
and manufacturing capabilities. Each of the subsystems of the total algorithm, hull, propeller and
engine are validated and tested independently to demonstrate feasible solutions. The combined system
uses a sequential approach, hull-propeller-engine, exchanging vectors of interacting variables to
produce an integrated Pareto front between fuel consumption and engine room volume. A test case is
run through the algorithm and the results are examined. With additional data pertaining to routes, fuel
prices and cargo rates, a ship designer could implement this model to find an optimal propulsion system
solution for a given ship speed and displacement. This solution would be subject to scrutiny if the
optimum lies on the subsystem model constraint boundaries, implying different regression models are
required.
Page | 2
Table of Contents
1 Design Problem Statement ................................................................................................................... 5
2 Nomenclature ....................................................................................................................................... 6
3 Hull Optimization Subsystem (Thomas McKenney) .............................................................................. 7
3.1 Mathematical Model .................................................................................................................... 7
3.1.1 Objective Function ................................................................................................................ 7
3.1.2 Constraints .......................................................................................................................... 12
3.1.3 Design Variables and Parameters ....................................................................................... 14
3.1.4 Model Summary .................................................................................................................. 15
3.2 Model Analysis ............................................................................................................................ 16
3.3 Optimization Study ..................................................................................................................... 18
3.3.1 Global Optimality ................................................................................................................ 19
3.3.2 Constraint Activity ............................................................................................................... 19
3.3.3 Case Study ........................................................................................................................... 21
3.4 Parametric Study ......................................................................................................................... 21
3.4.1 Volume Parametric Study ................................................................................................... 21
3.4.2 Ship Speed Parametric Study .............................................................................................. 24
3.5 Discussion of Results ................................................................................................................... 26
4 Propeller Optimization Subsystem (Brian Cuneo) .............................................................................. 28
4.1 Mathematical Model .................................................................................................................. 28
4.1.1 Objective Function .............................................................................................................. 29
4.1.2 Constraints .......................................................................................................................... 30
4.1.3 Design Variables and Parameters ....................................................................................... 32
4.1.4 Model Summary .................................................................................................................. 33
4.2 Model Analysis ............................................................................................................................ 34
4.2.1 Constraint Activity ............................................................................................................... 34

Page | 3
4.3 Numerical Analysis ...................................................................................................................... 35
4.4 Optimization Study ..................................................................................................................... 35
4.4.1 Case Study Introduction ...................................................................................................... 35
4.4.2 Global Optimality and Constraint Activity .......................................................................... 36
4.5 Parametric Study ......................................................................................................................... 37
4.6 Discussion of Results ................................................................................................................... 40
5 Engine Optimization Subsystem (Morgan Parker) .............................................................................. 40
5.1 Mathematical Model .................................................................................................................. 40
5.1.1 Objective Function .............................................................................................................. 41
5.1.2 Constraints .......................................................................................................................... 42
5.1.3 Feasibility ............................................................................................................................ 44
5.1.4 Model Summary .................................................................................................................. 45
5.2 Model Analysis ............................................................................................................................ 45
5.2.1 Boundedness ....................................................................................................................... 45
5.2.2 Constraint Activity ............................................................................................................... 46
5.3 Optimization Study ..................................................................................................................... 47
5.3.1 Implementation .................................................................................................................. 47
5.3.2 Results ................................................................................................................................. 47
5.3.3 Model Validation ................................................................................................................. 50
5.4 Parametric Studies ...................................................................................................................... 52
5.5 Results Discussion ....................................................................................................................... 55
6 System Integration Study .................................................................................................................... 56
6.1 Subsystem Tradeoffs ................................................................................................................... 56
6.2 Methodology ............................................................................................................................... 56
6.3 System Optimization Results ...................................................................................................... 58
6.4 Comparison to Subsystem Optimization .................................................................................... 59

Page | 4
6.5 Integrated System Parametric Study .......................................................................................... 60
6.6 Conclusions ................................................................................................................................. 64
7 Bibliography ........................................................................................................................................ 65
Appendix A Hull Code ............................................................................................................................. 66
1. Hull Optimization Code ....................................................................................................................... 66
2. Hull Objective Function ....................................................................................................................... 66
3. Hull Constraint Function ..................................................................................................................... 70
Appendix B Propeller Code .................................................................................................................... 71
1. Propeller Optimization Code............................................................................................................... 71
2. Propeller Objective Function .............................................................................................................. 72
3. Propeller Constraint Function ............................................................................................................. 74
Appendix C Engine Code ........................................................................................................................ 75
1. Engine Optimization Code .................................................................................................................. 75
2. Engine Objective Function .................................................................................................................. 78
3. Engine Constraint Function ................................................................................................................. 78

1 Design Problem Statement
Containerships are a vital component of the world’s economy. Over 95% of the world’s goods a
transported by sea. With this fact in mind, it can be concluded that an optimized containership design
could provide a major advantage in the industry.
looks like. For this project, the containership’s propulsion system was optimized. A ship’s propulsion
system can be divided into three main subsystems including the hull, propeller, and engine.
worked on the hull subsystem; Brian worked on the propeller subsystem; a
engine subsystem. These distinct systems
ship hull is optimized for speed, volume, resistance and stability.
combination of thrust, open water efficiency and vibration. Marine engines are optimized based on
power, fuel consumption, size, weight and r
weight/volume and speed, were set based on typical containership values
documented methods from a variety of sources to create algorithms that can independently optimize a
hull form, propeller and engine. Once these algorithms are linked, they will share key variables to find a
global optimum. This optimum will target fuel
Figure 1.1: Emma Maersk Containership
There are many trade-offs and competing goals in the ship design process. Some of these inclu
maximizing useable volume while minimizing resistance. Another trade
meets the power and rpm requirements while maintaining low fuel consumption. It is also important to
maximize the propeller efficiency while ensuring pro
more are aspects of the ship design process. This project focus
hull, engine, and propeller of a ship to determine the optimal combination. The optimization at
individual levels was based on analytical models that have been used for decades in the marine industry.
Design Problem Statement
Containerships are a vital component of the world’s economy. Over 95% of the world’s goods a
transported by sea. With this fact in mind, it can be concluded that an optimized containership design
could provide a major advantage in the industry. Figure 1.1 shows an example of what a containership
project, the containership’s propulsion system was optimized. A ship’s propulsion
system can be divided into three main subsystems including the hull, propeller, and engine.
worked on the hull subsystem; Brian worked on the propeller subsystem; and Morgan worked on the
distinct systems are linked through a few vital parameters. Independently a
speed, volume, resistance and stability. Propellers are optimized for a
ater efficiency and vibration. Marine engines are optimized based on
power, fuel consumption, size, weight and revolutions. Several parameters, such as cargo
set based on typical containership values. This project will use w
documented methods from a variety of sources to create algorithms that can independently optimize a
hull form, propeller and engine. Once these algorithms are linked, they will share key variables to find a
global optimum. This optimum will target fuel the consumption and engine room volume tradeoff
Emma Maersk Containership (www.nzshipmarine.com)
offs and competing goals in the ship design process. Some of these inclu
maximizing useable volume while minimizing resistance. Another trade-off is picking an engine that
meets the power and rpm requirements while maintaining low fuel consumption. It is also important to
maximize the propeller efficiency while ensuring proper thrust characteristics. All these trade
more are aspects of the ship design process. This project focused on the specific trade
hull, engine, and propeller of a ship to determine the optimal combination. The optimization at
analytical models that have been used for decades in the marine industry.
Page | 5
Containerships are a vital component of the world’s economy. Over 95% of the world’s goods are
transported by sea. With this fact in mind, it can be concluded that an optimized containership design
shows an example of what a containership
project, the containership’s propulsion system was optimized. A ship’s propulsion
system can be divided into three main subsystems including the hull, propeller, and engine. Thomas
nd Morgan worked on the
linked through a few vital parameters. Independently a
Propellers are optimized for a
ater efficiency and vibration. Marine engines are optimized based on
everal parameters, such as cargo
. This project will use well-
documented methods from a variety of sources to create algorithms that can independently optimize a
hull form, propeller and engine. Once these algorithms are linked, they will share key variables to find a
and engine room volume tradeoff.
offs and competing goals in the ship design process. Some of these include
off is picking an engine that
meets the power and rpm requirements while maintaining low fuel consumption. It is also important to
per thrust characteristics. All these trade-offs and
on the specific trade-offs between the
hull, engine, and propeller of a ship to determine the optimal combination. The optimization at the
analytical models that have been used for decades in the marine industry.

Page | 6
The main focus was to integrate these individual models to obtain a global optimization for ship
propulsion.
2 Nomenclature∇ Molded Volume [m3]
1+k1 Form Factor [-]
ABT Transverse Bulb Area [m2]
AE/AO Propeller Expanded Area Ratio [-]
AP Piston Area [m2]
AT Immersed Transverse Transom Area [m2]
AX Max. Transverse Underwater Area [m2]
B Maximum Beam [m]
Bcyl Cylinder Bore [m]
CB Block Coefficient [-]
CF Frictional Resistance Coefficient [-]
CM Midship Coefficient [-]
CP Prismatic Coefficient [-]
CR Residuary Resistance Coefficient [-]
CWP Waterplane Coefficient [-]
D Depth [m]
DP Propeller Diameter [m]
DP Delivered Power [kW]
ERV Engine Room Volume [m3]
EW Engine Weight [MT]
FC Fuel Consumption[MT/h]
FN Froude Number [-]
g Gravitational Constant [m/s2]
HB Vertical Center of Bulb Area [m]
i Number of Cylinders [-]
J Advance Coefficient [-]
K Cavitation Constant [-]
KQ Thrust Coefficient [-]
KT Thrust Coefficient [-]
L Length on Waterline [m]
LCB Longitudinal Center of Buoyancy [m]
LCG Longitudinal Center of Gravity [m]
LR Length of the Run [m]
Ls Length of Stroke [m]
n Propeller Revolutions per Second [1/s]
P,BMEP Brake Mean Effective Pressure [Pa]
P/D Pitch-Diameter Ratio [-]
P0 Pressure at Propeller Hub [-]
PE Engine Effective Power [kW]
PV Water Vapor Pressure [-]
Q Propeller Torque [kN-m]
RA Model-Ship Correlation Resistance [N]
RAPP Appendage Resistance [N]
RB Bulbous Bow Resistance [N]
RBare Bare Hull Resistance [N]
RF Frictional Resistance [N]
RT Required Thrust [-]
RTotal Total Resistance [N]
RTR Immersed Transom Resistance [N]
RW Wave Resistance [N]
SAPP Wetted Area of Appendages [m2]
SFC Specific Fuel Consumption [g/kWh]
T Propeller Thrust [-]
t Thrust Deduction fraction [-]
Tm Average Draft [m]
V Ship Speed [m/s]
VA Speed of Advance [m/s]
w Taylor wake fraction [-]
Z Number of Blades [-]
Δ Displacement [MT]
η0 Propeller Efficiency [-]
μ Kinematic Viscosity [m2/s]
ρ Seawater Density [kg/m3]

Page | 7
3 Hull Optimization Subsystem (Thomas McKenney)
The main goal in hull optimization is to minimize the resistance or drag of the vessel as it travels through
the water, while maintaining a specified displacement. Lower resistance will lead to a smaller power
requirement, which translates to the use of a smaller engine. Although there are basic guidelines for
reducing resistance, there are certain restrictions and considerations that are required to produce a
valid ship design. In general, the longer and more slender a ship’s hull is the less resistance there is.
Making the beam or width of a ship smaller is a good way of reducing resistance. But there are some
consequences if the beam becomes too small or the ship becomes too long. These include stability
issues, freeboard requirements, and reduction in useable volume for cargo.
3.1 Mathematical Model
The objective of the model is to minimize resistance. There are many resistance models that could be
used for this project. Most resistance models are analytical and based on a series of experiments on a
certain type of hull. To ensure that the model is accurate for any given ship, certain similarities are
required. This evaluation is conducted by determining coefficients such as the length-to-beam ratio,
beam-to-draft ratio, or the block coefficient, which describes the underwater hull form. This project will
focus on a basic hull form, used mainly for container ships. One of the most common resistance models
used for these types of ships is the Holtrop and Mennen model. This method is based on regression
analysis of model and full-scale tests of commercial cargo and tanker vessels.
3.1.1 Objective Function
The objective function is based on the Holtrop and Mennen model. All derivations in this section are
from the papers entitled “An Approximate Power Prediction Method” by J. Holtrop and G.G.J. Mennen
published in 1982 and “A Statistical Re-Analysis of Resistance and propulsion Data” by J. Holtrop
published in 1984. The objective function is the resistance equation provided in this paper.
The total resistance of a ship is expressed in Equation 1 below.
������ = �1 + �� + ���� + �� + �� + ��� + ��
Equation 1
The form factor of the hull uses a prediction formula that is shown as Equation 2 below.

Page | 8
1 + � = ���{0.93 + ��� � ��� !."�#"$ 0.95 − '��(!.)��##*1 − '� + 0.0225�'��!.,"!,}
Equation 2
The form factor formula includes the parameter LR, which is the length of the run according to Equation
3.
��� = 1 − '� + 0.06'��'�4'� − 1
Equation 3
The coefficient c12 is defined by the following equations depending on the draft to length ratio (T/L).
Draft is the vertical distance from the keel or bottom of the ship to the waterline.
��� = �0� !.���*##, 2ℎ45 0� > 0.05
Equation 4
��� = 48.20 �0� − 0.02 �.!$* + 0.479948 2ℎ45 0.02 < 0� < 0.05
Equation 5
��� = 0.479948 2ℎ45 0� < 0.02
Equation 6
In Equation 4, Equation 5, and Equation 6 the average molded draft is defined as T. The coefficient c13
accounts for the shape of the afterbody and is a function of the coefficient CStern that has a value based
on Table 3.1.
��� = 1 + 0.003':�;<=
Equation 7
Afterbody Form CStern
V-shaped sections -10
Normal section shape 0
U-shaped sections with
Hogner stern 10
Table 3.1: CStern Value Table
Page | 9
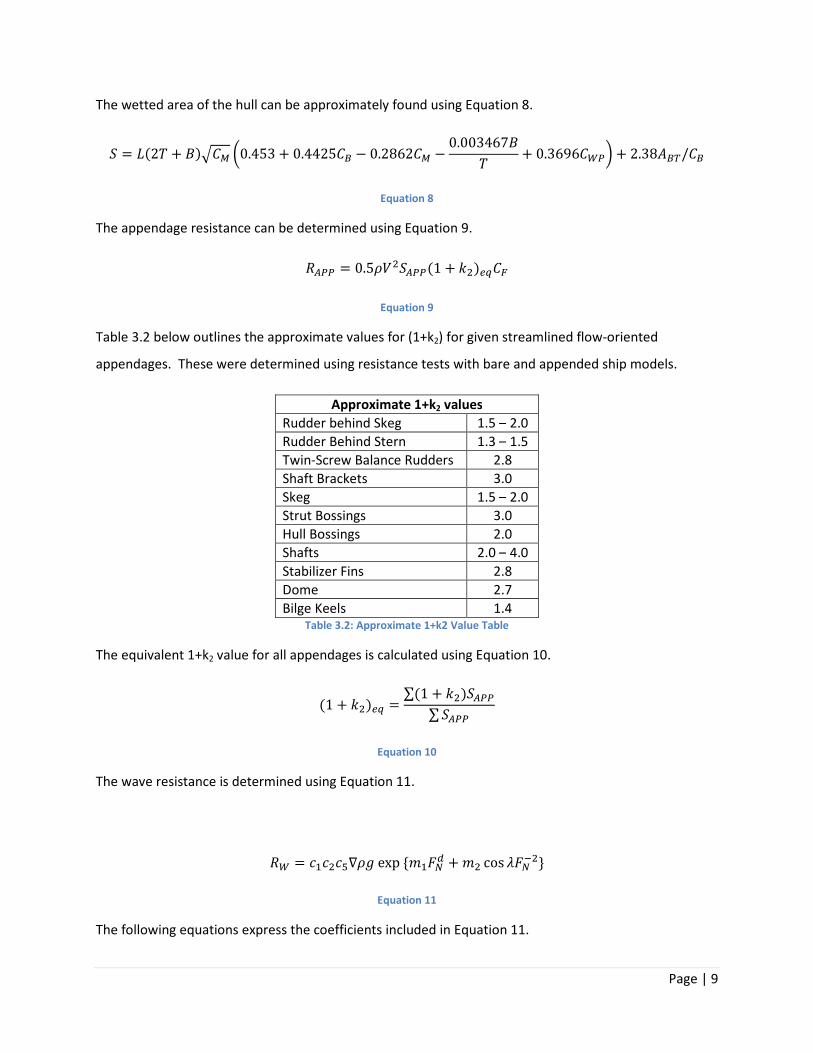
The wetted area of the hull can be approximately found using Equation 8.
> = �20 + ��?'@ �0.453 + 0.4425'� − 0.2862'@ − 0.003467�0 + 0.3696'�� + 2.38A��/'�
Equation 8
The appendage resistance can be determined using Equation 9.
���� = 0.5CD�>���1 + ��;E'
Equation 9
Table 3.2 below outlines the approximate values for (1+k2) for given streamlined flow-oriented
appendages. These were determined using resistance tests with bare and appended ship models.
Approximate 1+k2 values
Rudder behind Skeg 1.5 – 2.0
Rudder Behind Stern 1.3 – 1.5
Twin-Screw Balance Rudders 2.8
Shaft Brackets 3.0
Skeg 1.5 – 2.0
Strut Bossings 3.0
Hull Bossings 2.0
Shafts 2.0 – 4.0
Stabilizer Fins 2.8
Dome 2.7
Bilge Keels 1.4 Table 3.2: Approximate 1+k2 Value Table
The equivalent 1+k2 value for all appendages is calculated using Equation 10.
1 + ��;E = ∑1 + ��>���∑ >���
Equation 10
The wave resistance is determined using Equation 11.
�� = �����)∇CG exp {K�LMN + K� cos RLM(�}
Equation 11
The following equations express the coefficients included in Equation 11.

Page | 10
�� = 2223105�$�.$*,��0/���.!$",�90 − ST�(�.�$),)
Equation 12
�$ = 0.229577�/��!.����� 2ℎ45 �/� < 0.11
Equation 13
�$ = �� 2ℎ45 0.11 < �/� < 0.25
Equation 14
�$ = 0.5 − 0.0625�/� 2ℎ45 �/� > 0.25
Equation 15
�� = exp −1.89?���
Equation 16
�) = 1 − 0.8A�/�0'@�
Equation 17
R = 1.446'� − 0.03�/� 2ℎ45 �/� < 12
Equation 18
R = 1.446'� − 0.36 2ℎ45 �/� > 12
Equation 19
K� = 0.0140407�/0 − 1.75254∇��/� − 4.79323�/� − ��,
Equation 20
��, = 8.07981'� − 13.8673'�� + 6.984388'�� 2ℎ45 '� < 0.80
Equation 21
��, = 1.73014 − 0.7067'� 2ℎ45 '� > 0.80
Equation 22
K� = ��)'��exp −.1L=(��
Equation 23

Page | 11
��) = −1.69385 + �/∇�/� − 8.0�/2.36
Equation 24
U = −0.9
Equation 25
The half angle of entrance, iE, is the angle of the waterline at the bow in degrees with reference to the
center plane. It can be approximated using Equation 26.
ST = 1 + 89exp {−�/��!.*!*),1 − '���!.�!#*#1 − '� − 0.0225�'��!.,�,$��/��!.�#)$#100∇/���!.�,�!�}
Equation 26
�� = 0.56A���.)/{�0V0.31?A�� + 0 − ℎ�W}
Equation 27
The additional resistance due to the presence of a bulbous bow near the surface is determined using
Equation 28.
�� = 0.11exp −3X�(�L=Y� A���.)CG/1 + L=Y� �
Equation 28
X� = 0.56?A��/0 − 1.5ℎ�
Equation 29
L=Y = D/ZG0 − ℎ� − 0.25?A��� + 0.15D� Equation 30
Similarly, the additional pressure resistance due to the immersed transom can be determined using
Equation 31.
��� = 0.5CD�A��,
Equation 31
�, = 0.21 − 0.2L=� 2ℎ45 L=� < 5
Equation 32

Page | 12
�, = 0 2ℎ45 L=� ≥ 5
Equation 33
L=� = D/?2GA�/� + �'��� Equation 34
The model-ship correlation resistance can be approximated by Equation 35.
�� = 1/2 D�>'�
Equation 35
'� = 0.006� + 100�(!.�, − 0.00205 + 0.003?�/7.5'�#��0.04 − �#�
Equation 36
�# = 0/� 2ℎ45 0/� ≤ 0.04
Equation 37
�# = 0.04 2ℎ45 0/� > 0.04
3.1.2 Constraints
There are numerous constraints that were be considered for this optimization problem. These
constraints can be grouped into physical constraints and practical constraints. Physical constraints
would include a minimum draft to navigate a canal or enter a harbor or a maximum beam or length to
be able to transit the Panama Canal. Practical constraints would include requiring a certain beam to
ensure stability or dimensions that provide adequate freeboard. There is a third type of constraint for
this particular problem. There are restrictions of the resistance model, which are based on the types of
hull forms used to develop the model. All constraints used in this problem are provided below.
T ≤ 15 m (Draft limit for Port of Los Angeles and Panama Canal)
L ≤ 366 m (Length limit for Panama Canal)
B ≤ 49 m (Beam limit for Panama Canal)
0.0 ≤ D/√LWL ≤ 2.0 (Speed to Length Ratio Criteria for Holtrop Model)
0.01 ≤ V/?gLbc ≤ 0.55 (Froude Number Criteria for Holtrop Model)
Page | 13
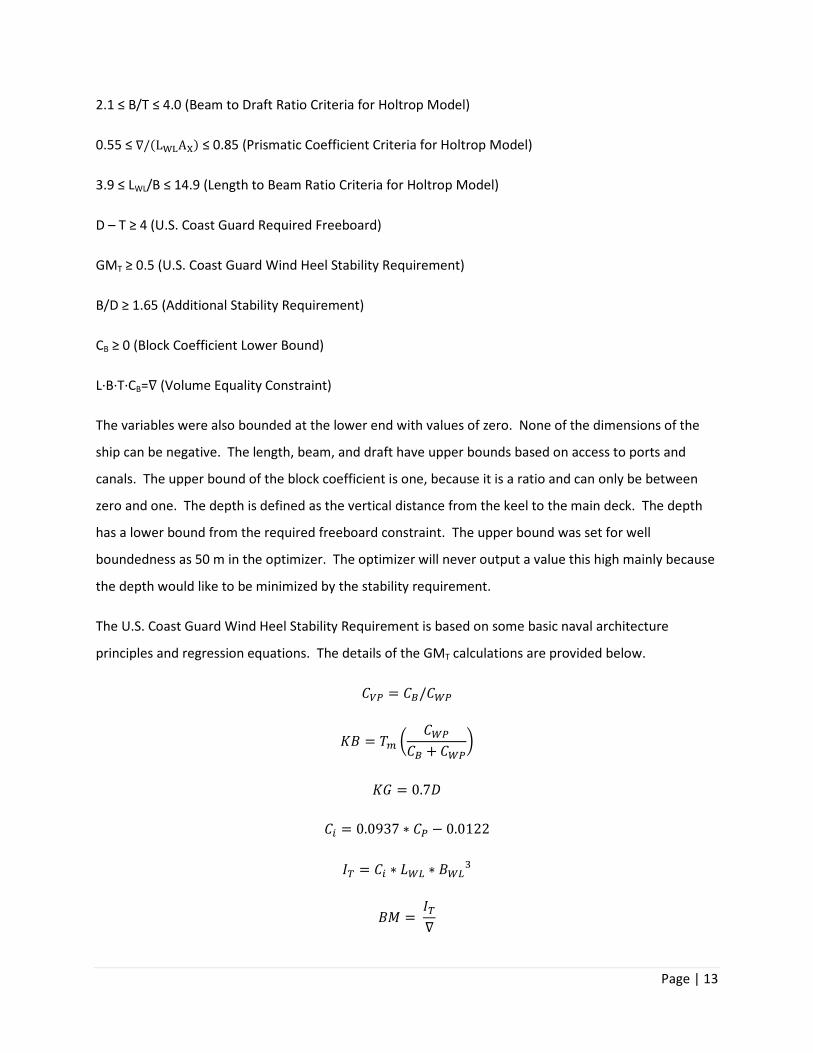
2.1 ≤ B/T ≤ 4.0 (Beam to Draft Ratio Criteria for Holtrop Model)
0.55 ≤ ∇/LbcAe� ≤ 0.85 (Prismatic Coefficient Criteria for Holtrop Model)
3.9 ≤ LWL/B ≤ 14.9 (Length to Beam Ratio Criteria for Holtrop Model)
D – T ≥ 4 (U.S. Coast Guard Required Freeboard)
GMT ≥ 0.5 (U.S. Coast Guard Wind Heel Stability Requirement)
B/D ≥ 1.65 (Additional Stability Requirement)
CB ≥ 0 (Block Coefficient Lower Bound)
L∙B∙T∙CB=∇ (Volume Equality Constraint)
The variables were also bounded at the lower end with values of zero. None of the dimensions of the
ship can be negative. The length, beam, and draft have upper bounds based on access to ports and
canals. The upper bound of the block coefficient is one, because it is a ratio and can only be between
zero and one. The depth is defined as the vertical distance from the keel to the main deck. The depth
has a lower bound from the required freeboard constraint. The upper bound was set for well
boundedness as 50 m in the optimizer. The optimizer will never output a value this high mainly because
the depth would like to be minimized by the stability requirement.
The U.S. Coast Guard Wind Heel Stability Requirement is based on some basic naval architecture
principles and regression equations. The details of the GMT calculations are provided below.
'f� = '�/'��
g� = 0h � '��'� + '��
gi = 0.7j
'Y = 0.0937 ∗ '� − 0.0122
l� = 'Y ∗ ��m ∗ ��m�
�n = l�∇

Page | 14
gn = g� + �n
in� = gn − gi
3.1.3 Design Variables and Parameters
The design variables for this optimization define the basic dimensions and shape of the ship hull. From
these variables, approximate calculations can be completed to determine design considerations and
determine if a design is feasible. The list of design variables is provided below.
• T, Mean Draft
• L, Length on Waterline
• B, Maximum Beam
• CB, Block Coefficient
• D, Depth
The design parameters also play an important role in this optimization and are listed below. Also
provided are example values or ranges for the parameters.
• VS, Speed of the Ship [10 – 13.5 m/s]
• ∇, Molded Volume [10,000 – 100,000 m3]
• CWP, Waterplane Coefficient [0.7 – 0.9]
• CM, Midship Coefficient [0.7 – 0.9]
• LCB, Longitudinal Center of Buoyancy [±5% from amidships]
• ATR, Submerged Transom Area [0 – 30 m2]
• CSTERN, Stern Shape [-25 – 10]
• SAPP, Appendage Area [0 – 100 m2]
• ABT, Transverse Area of Bulb [0 – 50 m2]
• HB, Center of Bulb Area [0 – 10 m]

Page | 15
3.1.4 Model Summary
Objective Function: max q = ��, �, 0� ∗ 1 + �� + ����'�� + ���, �, 0� + ��0� + ����, '�� + ���, 0, '��
Subject to:
G� = 0 − 15 ≤ 0
G� = � − 366 ≤ 0
G� = � − 49 ≤ 0
G# = − D√LWL ≤ 0
G) = D√LWL − 2.0 ≤ 0
G, = 0.01 − D√gLWL ≤ 0
G$ = D√gLWL − 0.55 ≤ 0
G* = 2.1 − �0 ≤ 0
G" = �0 − 4.0 ≤ 0
G�! = 0.55 − ∇�As� ≤ 0
G�� = ∇�As� − 0.85 ≤ 0
G�� = 3.9 − �� ≤ 0
G�� = �� − 14.9 ≤ 0
G�# = 4 − j + 0 ≤ 0
G�) = 0.5 − in� ≤ 0
G�, = 1.65 − �j ≤ 0
G�$ = −'� ≤ 0
ℎ� = � ∗ � ∗ 0 ∗ '� − ∇= 0

Page | 16
3.2 Model Analysis
Before attempting to implement the optimization problem, it is important to evaluate the objective
function and constraints to see if any information about the problem can be extracted. A common
method used to evaluate models is monotonicity analysis. This analysis can be used to validate that the
problem is well bounded with respect to every variable as well as determine possibly active constraints.
The application of monotonicity analysis for optimization problems is only possible under certain
conditions. For resistance optimization, the monotonicity of the objective function is unknown. This is
because the total resistance is a combination of different types of resistance that incorporate the
variables with various monotonicities. It cannot be determined if the objective function is increasing or
decreasing with respect to any of the variables. Although the monotonicity of the objective function
cannot be completed, the constraints can still be evaluated to prove well boundedness of the problem.
Monotonicity analysis was completed for all constraints. Each variable has at least one upper and lower
bound. This was determined by showing that there are both increasing and decreasing constraints with
respect to every variable. Table 3.3 below shows the monotonicity table for all the constraints. The plus
sign signifies that the constraint is increasing with respect to the variable. The minus sign signifies that
the constraint is decreasing with respect to the variable. The dots signify that the variable is not
included in the given constraint. The stars after the plus or minus signs signify that the given constraint
is active with respect to that variable. Most of the variables were present in multiple constraints, which
mean that active constraints could not be readily determined.

Page | 17
Table 3.3: Monotonicity Table for Constraints
The block coefficient and depth are the two variables that the most information can be determined from
the monotonicity analysis. The block coefficient is bounded by inequality constraint 15 (GMT stability
constraint). Although inequality constraint 17 bounds the block coefficient at the lower bound, it will
never reached this bound because the equality constraint requires a certain volume value, which cannot
be achieved when the block coefficient is zero. The depth variable is not present in the objective
function. It is, however, a very important dimension of a ship and was used for many calculations. The
depth plays a role in stability calculations as well as freeboard requirements. It can be seen in Table 3.3
that the depth was constrained by inequality constraint 14, which is the required freeboard constraint.
This constraint was active with respect to the depth because the freeboard should be pushed to its
minimum based on the other constraints. At least one of inequality constraints 15 and 16 was also
active with respect to depth.
Due to many of the variables having multiple increasing and decreasing roles in the constraints, it was
worth evaluating the constraints further to determine if any are redundant. This can be very difficult
when there are more than one or two variables because of the design space in multiple dimensions.

Page | 18
Some basic conclusions were made for a few constraints that seem to be related. After evaluating
inequality constraints 4 through 7, there seems to be possible redundancies. It can be determined that
inequality constraint 4 was not needed because inequality constraint 6 reached its lower bound first.
The same can be concluded for the upper bounds in inequality constraints 5 and 7. Inequality constraint
7 was not needed because inequality constraint 5 reached its upper bound first.
It is very difficult to determine any additional information from the monotonicity analysis. It can be
concluded that the optimization problem is well bounded and should output valid optimal results.
3.3 Optimization Study
Due to the fact that the resistance objective function was smooth and could be calculated very fast,
MATLAB was used as the optimization tool. The fmincon function was used to implement the gradient
based method used to determine the optimal solution. Three MATLAB files were generated: one that
calculated the objective function, one that had all the constraints, and a third that ran the optimization.
These files are included in Appendix A.
The results of the optimization problem mainly focus on the trends of how the principle dimensions of
the ship change as both the speed and volume vary, which will be discussed further in the next section.
One optimal solution for this problem would not be that meaningful. The test values used as
parameters were decided based on similar ship data. If an actual design of a ship was being completed,
more detailed information would be required to set the parameter values. This is why the main focus
for the results analysis was on the parametric study completed. The two most influential parameters
were the speed and volume of the ship. Both studies produced general trends that are logical based on
engineering judgment. The specific changes in the variables were more interesting as well as their
association with which constraints were active for all the parameter values. One of the most interesting
and unexpected occurrences is how the active constraints changed as the parameter values were
altered.
In order to fully understand the design space and what factors impacted the optimal solution, certain
tests were completed. The following subsections include example results for certain situations including
determining global optimally, constraint activity, as well as a case study that was completed using the
same values for all subsystems.

Page | 19
3.3.1 Global Optimality
Due to the smooth nature of the objective function and the constraints, it was determined that a global
optimum could be obtained using a gradient based or line search method. To verify these assumptions,
the model was started at various points in the design space. The results show that regardless of the
starting point, the final optimal solution is the same. This can be seen in Table 3.4 below. Various
starting points from the lower and upper bounds of all the variables were used. The same resulting
optimal solution proves that a global optimum can be found using the gradient based method utilized in
MATLAB. If all the resulting optimal solutions were not the same, this would lead to the conclusion that
there are multiple local optimums.
Table 3.4: Optimal Solution for Various Starting Points
3.3.2 Constraint Activity
Based on general naval architecture principles, it was hypothesized that the active constraints for this
problem would be the constraints associated with stability. This is because the resistance model can
reduce the resistance dramatically by making the ship narrower. The stability of the ship is directly
related to the beam or width of the ship. From these two statements, it could be concluded that the
stability requirements would most likely be the active constraints for this problem. Monotonicity
analysis also indicted that the stability constraints would most likely be active, at least for certain
variables.
The two main stability requirements are inequality constraints 14 and 15. Inequality constraint 14 sets a
required value for the freeboard (vertical distance from the waterline to the main deck). This value
would most likely be pushed to its limit because of the depth’s role in stability calculations. As the
freeboard increases, the depth also increases. The overall center of gravity of the ship usually increases

Page | 20
as the depth increases. A higher center of gravity translates to a less stable ship, which is taken into
account in inequality constraint 15. The GMT is a value that determines the upright stability of the ship.
A GMT value greater than zero means that the ship is stable. That value is usually increased based on
additional heel caused by wind. This is the only constraint that involves every variable.
Another major driver in this problem was the volume equality constraint, which is directly related to
displacement. If this constraint was not included, the optimizer would simply reduce the dimensions of
the ship, which would in turn reduce the resistance. This is not a meaningful result because ships are
designed for a purpose. In most cases their purpose involves carrying a specific amount of cargo. This
equality constraint only allows the hull form to change size while maintaining the same volume or
displacement.
After running the optimizer for varies conditions, the hypothesis made earlier in regards to the stability
constraints being active was generally correct. There was, however, an occurrence that was not
predicted. Other than the two stability constraints, there were other active constraints. The two other
constraints encountered were restrictions set by the model. This means that the optimizer wanted to
go outside the ranges that the model was valid for. In order to determine exactly how these active
constraints were limiting the optimal solution, the model constraints were removed and the optimizer
was run without them. The new result led to larger values for all the dimensions and a decrease in the
block coefficient. This means that the ship overall became larger, but the underwater shape was not as
full. Although this does have a better resistance, the shape of the hull no longer matches the shapes
used for the model, which makes that result invalid. Table 3.5 shows example outputs with and without
the model constraints. It can be concluded that if a wider range of hull form options is desired, another
resistance model would be required.
Table 3.5: Optimal Solutions With and Without Model Constraints
Based on constraint activity analysis, it can be concluded that there will always be at least one active
constraint for this individual subsystem. This means that all optimums are boundary solutions. Interior
optimums do occur, however, during the system integration. The details of the results of the system
integration will be discussed later in this report.
Page | 21
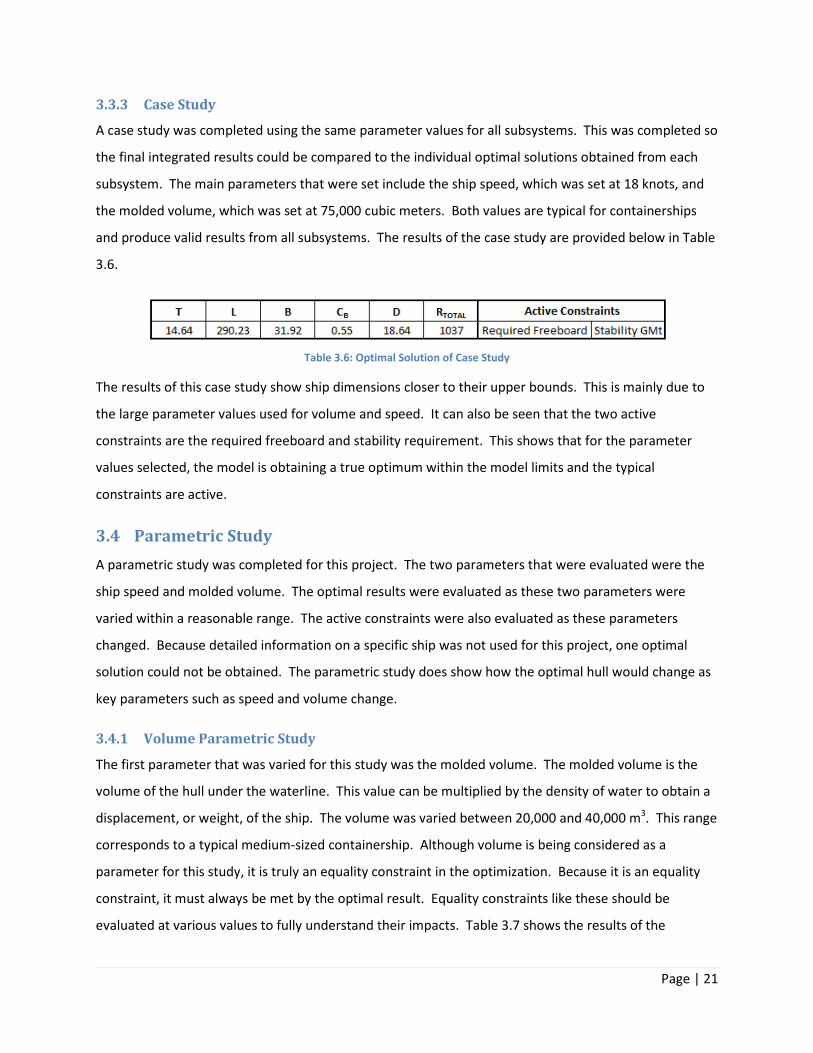
3.3.3 Case Study
A case study was completed using the same parameter values for all subsystems. This was completed so
the final integrated results could be compared to the individual optimal solutions obtained from each
subsystem. The main parameters that were set include the ship speed, which was set at 18 knots, and
the molded volume, which was set at 75,000 cubic meters. Both values are typical for containerships
and produce valid results from all subsystems. The results of the case study are provided below in Table
3.6.
Table 3.6: Optimal Solution of Case Study
The results of this case study show ship dimensions closer to their upper bounds. This is mainly due to
the large parameter values used for volume and speed. It can also be seen that the two active
constraints are the required freeboard and stability requirement. This shows that for the parameter
values selected, the model is obtaining a true optimum within the model limits and the typical
constraints are active.
3.4 Parametric Study
A parametric study was completed for this project. The two parameters that were evaluated were the
ship speed and molded volume. The optimal results were evaluated as these two parameters were
varied within a reasonable range. The active constraints were also evaluated as these parameters
changed. Because detailed information on a specific ship was not used for this project, one optimal
solution could not be obtained. The parametric study does show how the optimal hull would change as
key parameters such as speed and volume change.
3.4.1 Volume Parametric Study
The first parameter that was varied for this study was the molded volume. The molded volume is the
volume of the hull under the waterline. This value can be multiplied by the density of water to obtain a
displacement, or weight, of the ship. The volume was varied between 20,000 and 40,000 m3. This range
corresponds to a typical medium-sized containership. Although volume is being considered as a
parameter for this study, it is truly an equality constraint in the optimization. Because it is an equality
constraint, it must always be met by the optimal result. Equality constraints like these should be
evaluated at various values to fully understand their impacts. Table 3.7 shows the results of the

parametric study for volume. The table shows the volume value and its associated displacement, the
optimal solution with resistance value, and the active constraints for each solution.
Table 3.7: Parametric Study Results for the Volume Parameter
To help evaluate the results of the parametric study, a series of graphs were produced for the resistance
of each solution as well as one for each variable.
parametric study for volume.
Figure 3.1: Resistance and Draft Curves for Volume Parametric Study
parametric study for volume. The table shows the volume value and its associated displacement, the
optimal solution with resistance value, and the active constraints for each solution.
: Parametric Study Results for the Volume Parameter
To help evaluate the results of the parametric study, a series of graphs were produced for the resistance
of each solution as well as one for each variable. Figure 3.1 through Figure 3.3 shows the graphs of the
Resistance and Draft Curves for Volume Parametric Study
Page | 22
parametric study for volume. The table shows the volume value and its associated displacement, the
To help evaluate the results of the parametric study, a series of graphs were produced for the resistance
the graphs of the

Figure 3.2: Length and Beam Curves for Volume Parametric Study
Figure 3.3: Depth and Block Coefficient Curves for Volume Parametric Study
It can be seen from the results of the parametric study
increases. The only variable that does not increase is the block
general trend of the principle dimensions correspond to the increased volum
the molded volume, the dimensions of the ship must increase to
From the resistance curve, it can also be seen that the resistance increases linearly with volume. This
also makes sense because the added volume will cause the resistance to increase.
beam curves are relatively linear as the volume varies.
a value of 0.54. This variable most likely remained constant due to a lower
translating to a lower resistance. The value of 0.54 was the lowest value allowed by the active
constraint, which was the prismatic coefficient lower limit.
the remaining variables would then have to be increased to meet the changing volume requirement.
The one variable that had very unexpected results was the depth.
active, the depth should follow the same trend as the draft, but at higher values.
study, the freeboard constraint was only active for the first five values for the volume.
Length and Beam Curves for Volume Parametric Study
Depth and Block Coefficient Curves for Volume Parametric Study
the parametric study that most of the variables increase as the volume
increases. The only variable that does not increase is the block coefficient, which remains constant. The
general trend of the principle dimensions correspond to the increased volume requirement. To increase
the molded volume, the dimensions of the ship must increase to accommodate the added volume.
From the resistance curve, it can also be seen that the resistance increases linearly with volume. This
added volume will cause the resistance to increase. The draft, length, and
beam curves are relatively linear as the volume varies. The block coefficient remained constant around
a value of 0.54. This variable most likely remained constant due to a lower block coefficient always
to a lower resistance. The value of 0.54 was the lowest value allowed by the active
constraint, which was the prismatic coefficient lower limit. Due to the block coefficient not changing,
d then have to be increased to meet the changing volume requirement.
The one variable that had very unexpected results was the depth. When the freeboard constraint is
active, the depth should follow the same trend as the draft, but at higher values. During this parametric
study, the freeboard constraint was only active for the first five values for the volume.
Page | 23
that most of the variables increase as the volume
coefficient, which remains constant. The
e requirement. To increase
the added volume.
From the resistance curve, it can also be seen that the resistance increases linearly with volume. This
The draft, length, and
The block coefficient remained constant around
ck coefficient always
to a lower resistance. The value of 0.54 was the lowest value allowed by the active
Due to the block coefficient not changing,
d then have to be increased to meet the changing volume requirement.
When the freeboard constraint is
ng this parametric
The lower

portion of the depth curve does show the same trend as the draft variable, but becomes very non
after the freeboard constraint is no longer active.
the depth could be multiple values if unconstrained by the freeboard requirements
values could have been determined by the values that meet the stability require
mentioned previously in this report, the prismatic coefficient constraint was active for most of the
results. For this parametric study, it was active for all solutions.
being pushed to the limits of the type of
3.4.2 Ship Speed Parametric Study
The second parameter that was varied for this study was ship speed.
determined by the owner of the vessel and depends on the value of the
ship is required to travel. Choosing the design speed of a ship is a very important decision and drives a
large portion of the rest of the design. Containerships usually travel faster than other cargo carriers
such as oil tankers because of the type of goods they carry. Typical speeds of containerships are
between 20 and 25 knots. To fully understand how the design changes depending on speed, a full range
of values from one to 25 knots was used for this parametric study.
parametric study for ship speed. The table shows the
resistance value, and the active constraints for each solution.
Table 3.8: Parametric Study Results for the Ship Speed Parameter
portion of the depth curve does show the same trend as the draft variable, but becomes very non
no longer active. This non-linearity could correspond to the fact that
the depth could be multiple values if unconstrained by the freeboard requirements. The resulting depth
values could have been determined by the values that meet the stability requirements the best.
mentioned previously in this report, the prismatic coefficient constraint was active for most of the
results. For this parametric study, it was active for all solutions. This means that the optimal solution is
the type of hull form used to develop the Holtrop model.
Ship Speed Parametric Study
The second parameter that was varied for this study was ship speed. The ship speed is often
determined by the owner of the vessel and depends on the value of the cargo and the distance th
. Choosing the design speed of a ship is a very important decision and drives a
large portion of the rest of the design. Containerships usually travel faster than other cargo carriers
tankers because of the type of goods they carry. Typical speeds of containerships are
To fully understand how the design changes depending on speed, a full range
of values from one to 25 knots was used for this parametric study. Table 3.8 shows the results of the
parametric study for ship speed. The table shows the ship speed in knots, the optimal solution with
resistance value, and the active constraints for each solution.
: Parametric Study Results for the Ship Speed Parameter
Page | 24
portion of the depth curve does show the same trend as the draft variable, but becomes very non-linear
linearity could correspond to the fact that
. The resulting depth
ments the best. As
mentioned previously in this report, the prismatic coefficient constraint was active for most of the
This means that the optimal solution is
The ship speed is often
cargo and the distance that the
. Choosing the design speed of a ship is a very important decision and drives a
large portion of the rest of the design. Containerships usually travel faster than other cargo carriers
tankers because of the type of goods they carry. Typical speeds of containerships are
To fully understand how the design changes depending on speed, a full range
shows the results of the
the optimal solution with

To help evaluate the results of the parametric study, a series of graphs were produced for the resistance
of each solution as well as one for each variable.
parametric study for ship speed.
Figure 3.4: Resistance and Draft Curves for Ship Speed Parametric Study
Figure 3.5: Length and Beam Curves for Ship Speed Parametric Study
Figure 3.6: Depth and Block Coefficient Curves for Ship Speed Parametric Study
The resistance curve shows the basic relationship between speed and resistance for ships.
variables seem to change dramatically at certain speed values.
active constraints for the optimal solutions as the speed changes.
constraints is that the freeboard and stability constraint
To help evaluate the results of the parametric study, a series of graphs were produced for the resistance
of each solution as well as one for each variable. Figure 3.4 through Figure 3.6 are the graphs of
Resistance and Draft Curves for Ship Speed Parametric Study
Length and Beam Curves for Ship Speed Parametric Study
Depth and Block Coefficient Curves for Ship Speed Parametric Study
curve shows the basic relationship between speed and resistance for ships.
variables seem to change dramatically at certain speed values. These changes can be related to the
active constraints for the optimal solutions as the speed changes. The first trend in the active
constraints is that the freeboard and stability constraints are active from one knot to 20 knots.
Page | 25
To help evaluate the results of the parametric study, a series of graphs were produced for the resistance
the graphs of the
curve shows the basic relationship between speed and resistance for ships. Also, the
These changes can be related to the
he first trend in the active
are active from one knot to 20 knots. These

Page | 26
two constraints do not have a major impact in the change in dimension values though. The freeboard
and stability constraints do affect the results from 20 to 25 knots because they are no longer active. The
prismatic coefficient constraint then becomes active, which means that the optimal ship is pushing the
limits of the model. This changeover in active constraints made the draft and depth decrease and the
length and beam increase slightly. The block coefficient remains constant for this range, which is similar
to the volume parametric study when the prismatic coefficient constraint was active.
The major changes in the results occur when the length to beam ratio constraint and the draft upper
limit constraints were active. An initial trend can be seen for the first two speed values, but is stopped
when the length to beam ratio constraint became active. This constraint being active caused all
variables to remain relatively constant. This occurs because with the length to beam ratio being set, the
values of length and beam do not change much. With the length and beam not changing, the draft and
depth must remain at the same values also to maintain the required volume. Between 9 and 13 knots
the draft upper limit constraint became active. This in turn set the draft and depth, which translated to
the length and beam not varying that much to maintain the required volume. At around 13 knots, all
variables change dramatically. At this point, only the freeboard and stability constraints were active. In
general, as the speed increases a more slender hull form would have better resistance. This means that
the length would increase and the beam would decrease. Draft would also decrease as speed increased
to have better resistance. The block coefficient would decrease to generate a more slender hull. This
trend can be seen in the results, but to a dramatic degree. It can be seen that changing active
constraints play a major role in the optimal solution.
The Holtrop model seems to play a restrictive role in finding the true optimal solutions. It can be seen
that between 18 and 25 knots that the solution is constrained by the model limits. It is important to
note that when the Holtrop model was developed, the ships were not designed to go at higher speeds
greater than 20 knots. Because none of the hulls used for the model were designed to go this fast, it can
be concluded that these hulls might not be the optimal designs for these higher speeds. This idea is
reinforced by the results of this parametric study. The active constraints at these higher speeds are
related to the limits of the model, not the typical freeboard and stability requirements.
3.5 Discussion of Results
The results of the parametric studies show how important active constraints are in the resulting optimal
solutions. Although the predicted trends could be seen in the resulting data, the optimal solutions were
Page | 27
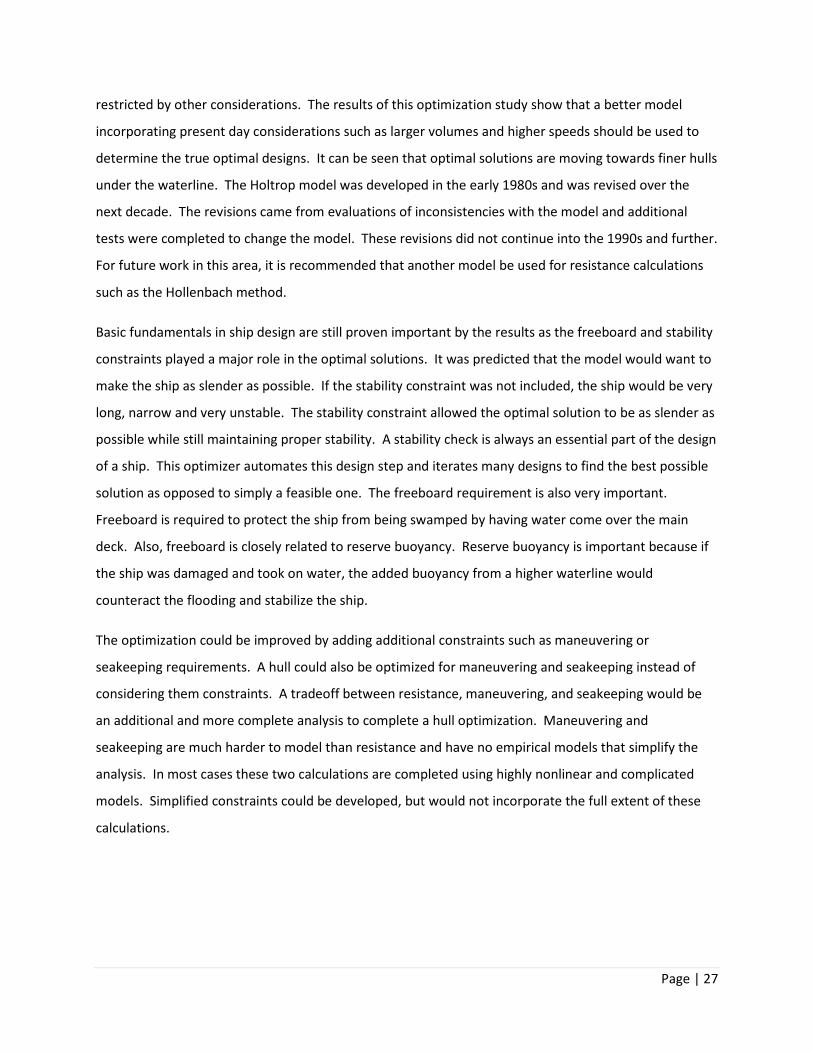
restricted by other considerations. The results of this optimization study show that a better model
incorporating present day considerations such as larger volumes and higher speeds should be used to
determine the true optimal designs. It can be seen that optimal solutions are moving towards finer hulls
under the waterline. The Holtrop model was developed in the early 1980s and was revised over the
next decade. The revisions came from evaluations of inconsistencies with the model and additional
tests were completed to change the model. These revisions did not continue into the 1990s and further.
For future work in this area, it is recommended that another model be used for resistance calculations
such as the Hollenbach method.
Basic fundamentals in ship design are still proven important by the results as the freeboard and stability
constraints played a major role in the optimal solutions. It was predicted that the model would want to
make the ship as slender as possible. If the stability constraint was not included, the ship would be very
long, narrow and very unstable. The stability constraint allowed the optimal solution to be as slender as
possible while still maintaining proper stability. A stability check is always an essential part of the design
of a ship. This optimizer automates this design step and iterates many designs to find the best possible
solution as opposed to simply a feasible one. The freeboard requirement is also very important.
Freeboard is required to protect the ship from being swamped by having water come over the main
deck. Also, freeboard is closely related to reserve buoyancy. Reserve buoyancy is important because if
the ship was damaged and took on water, the added buoyancy from a higher waterline would
counteract the flooding and stabilize the ship.
The optimization could be improved by adding additional constraints such as maneuvering or
seakeeping requirements. A hull could also be optimized for maneuvering and seakeeping instead of
considering them constraints. A tradeoff between resistance, maneuvering, and seakeeping would be
an additional and more complete analysis to complete a hull optimization. Maneuvering and
seakeeping are much harder to model than resistance and have no empirical models that simplify the
analysis. In most cases these two calculations are completed using highly nonlinear and complicated
models. Simplified constraints could be developed, but would not incorporate the full extent of these
calculations.

Page | 28
4 Propeller Optimization Subsystem (Brian Cuneo)
To achieve the maximum fuel efficiency for the hull-propeller-engine system, the propeller efficiency
was maximized. The final propeller design provided the necessary thrust to meet the design speed of
the ship.
The propulsion system of a ship can have many forms however for the design of this system choices
were limited to Wageningen B-Series Propellers. B-Series Propellers have become very popular for ships
with fixed pitch propellers due to the variety of blade number, pitch to diameter ratios, and expanded
area ratios that are available. Design variables for B-Series propellers include speed of advance,
expanded area ratio, pitch to diameter ratio, and the number of propeller blades. The main input
parameters for the optimization problem include the thrust required to maintain design speed, the
diameter that fits under the hull and the rpm and torque provided by the engine.
The interaction between hull, propeller and engine introduces trade-offs that must be made if all sub-
systems are to be optimized for maximum fuel efficiency. The diameter of the prop is restricted by the
hull. A larger diameter propeller increases propeller efficiency, however, the hull draft is restricted by
port depths and stability issues. Also the input shaft rpm of the engine influences the maximum
diameter that can be used for the propeller due to cavitation concerns that is a function of propeller
blade tip speeds.
4.1 Mathematical Model
The optimal propeller design for fuel efficiency is to maximize the propeller efficiency behind the hull of
the ship. This optimization is dependent on coefficients of torque and thrust, which are determined by
the hull shape and the properties of the engine. For B-Series propellers a model has been developed by
Bernitsas and Ray. Propeller optimization must meet the requirements for thrust to meet the speed
that the owner has specified using the power that is delivered by the engine. Figure 4.1 displays a graph
of the objective function versus the advance coefficient. This graph is for a fixed blade number (4) and
fixed expanded area ratio (0.6) with different lines representing pitch to diameter ratios.
Many assumptions were made in this model to allow for simplification of calculations while still
producing meaningful results. First, the Taylor wake fraction, and thrust deduction coefficient are
considered constant for all iterations of the hull. While this is not completley accurate, because the
same hull type and clearances are used for all runs, the results are reasonable as the two coefficients
would change very little between cases. Another main assumption is that no efficiencies are used

Page | 29
between the propeller and engine. As there is no reduction gear used this becomes more accurate, but
the missing efficiencies would have the same effect on all iterations of the optimization code. So this
may affect the final value of the objective function, but the optimum design variables will be the same.
Figure 4.1: Wageningen B-Series Chart
4.1.1 Objective Function
The standard mathematical model for the optimization problem can be written as follows in Equation
38, where η0 is a function of KT, KQ, and J as shown in Equation 39. The values for KT and KQ in terms of
the design variables are found using experimental results. The experimental data gives coefficients and
exponents to Equation 40 and Equation 41, which can be found in “KT, KQ and Efficiency Curves for the
Wageningen B-Series Propellers” and in the code implementation shown in Appendix B .
KtuSKSv4 w0
= qx , Xj , AyAz , {� Equation 38
w| = xg�2}g~ Equation 39
g� = � '�,�,�,�� ∗ x�� ∗ Xj�� ∗ ATA|�� ∗ {��
Equation 40

Page | 30
g~ = � '�,�,�,�~ ∗ x�� ∗ Xj�� ∗ ATA|�� ∗ {��
Equation 41
4.1.2 Constraints
The model is constrained by several physical and practical constraints. The diameter is constrained to
being less that a constant, a, determined by the hull shape and necessary hull clearances shown in
Equation 42. The advance coefficient design variable is defined by the speed of advance, the shaft
revolutions per second, and the propeller diameter set by the ship speed, hull form, and engine
revolution per second as shown in Equation 43. The thrust from the propeller is related to the required
thrust to make the ship speed by Equation 46.
j ≤ t
Equation 42
x = D�5j
Equation 43
g� = 0C5�j# Equation 44
g~ = jX2}C5�j) Equation 45
�� = 01 − ��
Equation 46
For the model, to ensure that the propeller rpm and diameter are constant in the dimensionless
coefficients, Equation 43, Equation 44, and Equation 45 are combined into two non-linear constraints
which are shown below.
0 = 0 ∗ x�C ∗ j� ∗ D�� − g�
Equation 47

Page | 31
jX ∗ x�2}Cj�D�� − g~ ≤ 0
Equation 48
Equation 48 is an inequality constraint because the power needed to overcome the resistance may be
less than the max power that is supplied by the engine. Equation 48 is not used as a constraint because
the engine was matched to the necessary thrust. The model can also be used to maximize the speed for
a given engine. If this is the case, Equation 48 is active.
Another problem when dealing with propeller efficiency optimization is cavitation concerns. The
following constraint is placed on the blade expanded area ratio to prevent cavitation based on the
propeller diameter, the water pressure at the propeller hub, and the thrust provided by the propeller.
ATA| − 1.3 + 0.3 ∗ {�0X| − Xf�j� − g ≤ 0
Equation 49
Where P0 is the static pressure at the propeller hub, PV is the vapor pressure of water, and K is a
constant depending on ship type for a single screw vessel K is 0.2. (Van Manen & Van Oossanen, 1988)
The following six constraints are practical constraints required by the Wageningen B-Series Propellers.
The first two practical constraints are for the blade number which must be an integer value. The next
two constraints are required for the expanded area ratio of the B-Series propeller. Outside of the range
given for expanded area ratio the experimental data for the thrust coefficient and torque coefficient is
no longer reliable. The final requirements by the Wageningen B-Series model are placed on the pitch to
diameter ratio. Again, outside of the given range the experimental data equations are no longer
reliable.
2 − { < 0
Equation 50
{ − 8 < 0
Equation 51

Page | 32
0.30 − ATA| ≤ 0
Equation 52
ATA| − 1.05 ≤ 0
Equation 53
0.5 − Xj ≤ 0 Equation 54
Xj − 1.40 ≤ 0
Equation 55
4.1.3 Design Variables and Parameters
The optimization design variables for propeller optimization are mainly dimensionless values used to
describe the blade shapes and angles. The dimensionless values depend on parameters that are
dependent on the other subsystem which induces coupling in the optimization process. These variables
are listed below.
• Speed of Advance (J)
• Pitch to Diameter Ratio (P/D)
• Expanded Area Ratio (AE/AO)
• Number of Blades (Z)
The main parameters that are used in the propeller optimization system are listed below.
• Required Thrust (RT)
• Ship Speed (VS)
• Maximum Propeller Diameter (D)

Page | 33
4.1.4 Model Summary
Objective Function:
KtuSKSv4 w0
= qx , Xj , AyAz , {� = xg02}g� Where:
g� = � '�,�,�,�� ∗ x�� ∗ Xj�� ∗ ATA|�� ∗ {��
g~ = � '�,�,�,�~ ∗ x�� ∗ Xj�� ∗ ATA|�� ∗ {��
Subject To: ℎ� = 0 ∗ x�
C ∗ j� ∗ D�� − g� = 0
G� = ATA| − 1.3 + 0.3 ∗ {�0X| − Xf�j� − g ≤ 0
G� = jX ∗ x�2}Cj�D�� − g~ ≤ 0
G� = −x ≤ 0
G# = 2 − { < 0
G) = { − 7 < 0
G, = 0.30 − ATA| ≤ 0
G$ = ATA| − 1.05 ≤ 0
G* = 0.5 − Xj ≤ 0 G" = Xj − 1.40 ≤ 0

Page | 34
4.2 Model Analysis
Before running the optimization code the model was examined for well boundedness by using
monotonicity analysis. Due to the complexity of the objective function, monotinicities could not be
determined. This required all of the variables to be well bounded in the constraints.
Table 4.1 shows the montonicity table for the optimization problem. The table shows that all of the
design variables are bounded by the physical limitations of the model used for analyses, so from
monotonicity principle one the problem is well bounded.
J P/D AE/A0 Z
f
h1 +
g1 + -
g2 +
g3 -
g4 -
g5 +
g6 -
g7 +
g8 -
g9 +
Table 4.1 Monotonicity Table
4.2.1 Constraint Activity
Activity of the constraints is difficult to determine due to the lack of information surrounding the
objective function. The pitch to diameter ratio is bounded by active constraints g8 and g9. The speed of
advance is constrained by h1 and g3. The expanded area ratio is constrained by the conditionally critical
set of g1, g6, and g7. The blade number is constrained by the conditionally critical set of g1, g4, and g5.
Ane of changing active constraints can be seen in the case study in section 4.4. In the example provided
the following constraints are active depending on the blade number being examined:

Page | 35
Blade Number (Z) Active Constraints
3 h1,g6
4 h1,g6,g9
5 h1,g1
6 h1,g1
7 h1,g9,g7
Table 4.2: Constraint Activity
4.3 Numerical Analysis
The optimization algorithm was then run for a test case to find an optimal value for a given ship and
engine. The optimization algorithm used was a version of an active set algorithm found in MATLAB’s
fmincon function. The constraints in the optimization method require tradeoffs between the other two
subsystems of the hull-propeller-engine optimization problem. Either the required thrust from the hull
or the delivered horsepower from the engine can be the factor that most influences the propeller
efficiency. A parametric study was done to see the effects of changing the resistance and delivered
power.
4.4 Optimization Study
4.4.1 Case Study Introduction
A case study was analyzed to see if the model successfully found an optimum for realistic parameters for
a ship. The case study was done for a preselected volume of 75,000 m3 and ship speed for 18 knots.
The volume and ship speed were used to find an optimum resistance. The optimal resistance was input
to the propeller optimization along with the corresponding draft. The following data was used for the
optimization:
Draft = 14.64 [m]
D = 10.25 [m]
VS = 18 [knots]
RT = 1036.5 [kN]
t = 0.155 [-]
w = 0.252 [-]
When this data is entered into the optimization code, the following optimums were obtained for each
blade number.

Page | 36
Blade Number (Z) J P/D AE/A0 η0
3 0.7998 1.0547 0.3 0.7230
4 0.9951 1.4 0.3 0.7091
5 0.9372 1.2552 0.6231 0.6997
6 0.962 1.2826 0.7429 0.6989
7 1.0262 1.4 1.05 0.7148
Table 4.3: Test Case Results
From Table 4.3 the overall optimum is a 3 blade prop with P/D of 1.05, AE/A0 of 0.3, and operating at J of
0.800. This combination of design variables results in an ηo of 0.723. With this propeller, the thrust
required to overcome the resistance can be accomplished with a delivered power of 28,650 kW. The
engine would be required to operate at a speed of 0.845 rps if no reduction gear is used, which would
increase the required power due to losses in gearing efficiency.
4.4.2 Global Optimality and Constraint Activity
Multiple starting points were examined to check for global versus local optimum. Table 4.4 shows a
sample of results of starting from multiple points. All runs converged to the same point indicating a
global maximum.
J0 P/D0 (AE/A0)0 η0 max
0.1 0.5 0.3 0.7230
0.4 0.85 0.9 0.7230
0.6 0.6 0.10 0.7230
0.5 1.4 1.05 0.7230
Table 4.4: Results for Multiple Starting Points
For the optimal case, the constraint activity is examined. The overall optimum is constrained by the
model constraint on AE/AO, blade number, and the thrust constraint h1. Propellers are most efficient
with the smallest number of blades, and small expanded area ratios, so these results are to be expected
if the cavitation constraint is not active. As the blade number is increased, the cavitation becomes
active for blade numbers 5 through 7.
How the constraints affect the optimization problem can be examined by relaxing the different
constraints. When the equality constraint on thrust is removed, the program can find the optimal
efficiency for a given draft. Table 4.5 shows the results of running the optimization program with the

Page | 37
constraint relaxed to normal. While a higher efficiency can be achieved the thrust is not equal to what is
required.
Blade # 3 4 5 6 7
η0 (h1 active) 0.7230 0.7091 0.6997 0.6989 0.7148
η0 (h1 relaxed) 0.7783 0.7643 0.7530 0.7355 0.7408
Table 4.5: Comparison of Efficiency With Thrust Constraint Relaxed
The optimal design varies by less than 3 percent for all of the different blade numbers. This could be
important if more factors were taken into account than just efficiency at cruising speed. Vibration
concerns may impact the number of blades desired, and if the ship will often operate outside of design
speed a different speed of advance or pitch to diameter ratio might be desired.
Figure 4.2: Blade Number Vs. Efficiency
4.5 Parametric Study
After a feasible solution was found for the case study, a parametric study was conducted to examine the
effects of key parameters on the efficiency that can be achieved. The parameters that were examined
were the maximum propeller diameter, the required thrust to overcome resistance, and the delivered
power from the engine. These parameters were chosen due to the fact that they are influenced the
most by the overall system so they become important when examining tradeoffs.

Page | 38
Figure 4.3 displays the relationship between propeller diameter and the efficiency η0. With all other
parameters held constant the efficiency of the propeller is increased with the diameter of the propeller.
This shows that the largest possible diameter propeller should be used, however increasing the
propeller diameter leads to a ship with a deeper draft which can raise the required thrust necessary to
meet the design speed.
Figure 4.3: Diameter Vs. Efficiency
Examining the graph shows how the constraints affect the efficiency as the diameter is increased. As
the diameter is increased, the tip speed of the blades increases, which causes the cavitation constraint
to be dominant. The cavitation constraint forces the blade number to increase, which is the cause of the
irregularity in the curve near 8.5 meter diameter.
The next parameter that was examined was the required thrust. As the required thrust is increased with
all other parameters constant, the efficiency of the propeller decreases.

Page | 39
Figure 4.4: Required Thrust Vs. Efficiency
The final parameter explored was how the delivered power affected the efficiency. In this case the
efficiency increases as the delivered power increases due to the increase in torque that is available to
the propeller. This again will require tradeoffs in the complete system design because the more power
from the engine the larger the engine must be and less fuel efficient.
Figure 4.5: Delivered Power Vs. Efficiency
The above studies of how different parameters affect the optimum solution display how tradeoffs must
be taken into account for optimum fuel efficiency of the system.

Page | 40
4.6 Discussion of Results
Optimizing the propeller for a given hull form is essential for optimizing the overall fuel consumption of
the hull-propeller-engine system. Examination of the optimum for the case study indicates that the
solution is a minimum, and by checking multiple start points the stationary point may be considered a
global minimum. The optimum efficiency of 72.3% is reasonable when compared to real propeller
efficiency of vessels this size as well as the model test data.
The model does run into the physical bounds of the regression data at times. If more data existed for
propellers with smaller expanded area ratios or higher pitch to diameter ratios, it is possible that a more
efficient propeller can be found.
The problem could be made more interesting if more aspects were taken into account than just cruising
speed efficiency. For containerships, the propeller should be optimized for cruising speed because they
mostly sail in open water and being efficient at cruising speeds is most important. However, looking at
other ship types such as navy ships could introduce design tradeoffs. Navy ships need to be efficient
both at their cruising speed as well as sprint speed when they need to get somewhere in a hurry. Also
cavitation becomes a higher concern due to increased vibration which could be detected and give away
ships positions, thus further limits on cavitation should be applied.
5 Engine Optimization Subsystem (Morgan Parker) This section concerns the engine subsystem. Regression data shows that large marine two-stroke diesel
engines are more efficient than smaller engines of the same type, producing equal power. This is due to
a variety of factors including frictional, inflow and exhaust losses as well as thermodynamic and
stoichiometric efficiencies. As such, a cargo carrying vessel must obtain a balance between a large
efficient engine that can substantially reduce cargo capacity, and a smaller less efficient engine that
requires less machinery space. The optimization model that follows explores this tradeoff using current
engine data, simple first principle models and industry accepted regression formulas.
5.1 Mathematical Model
The objective function is designed to minimize engine room volume (ERV), which is a tradeoff to fuel
consumption. It was found that fuel consumption tracks linearly with BMEP, as shown in Figure 5.1,
where data sources are from the applicable range of Wärtsilä two-stroke marine diesels. The
relationship between SFC and BMEP is stronger than any other variable due to a mutual dependence on

the mass of intake air. For this reason the optimization was conducted using BMEP, which was
converted to SFC during post processing. Constraints are made up of four main components. The first is
a relation between basic engine parameters and pow
reference text (Parsons M. , 2007). This is a first principles calculation. When the brake mean effective
pressure is used in the formula typical inefficiencies such as friction a
the formula yields an accurate prediction. Most containerships do not use reduction gears, so there is
no need for intermediate gearing efficiency or selection calculations between the engine and propeller.
The second component is a regression relation between the same major engine parameters and engine
weight. This relation was developed from published Wärtsilä two
component is a linear relationship between engine weight
470 Course Notes(Parsons M. , 2007)
capacity is usually either volume limited (low density cargo) or weight l
Containerships fall into the volume limited category such that engine room volume is a more critical
factor than the weight of the engine itself. The final component is a set of practical constraints on the
engine parameters based on current engines.
Figure
5.1.1 Objective Function
The first component of the objective function is a regression relation between the engine’s internal
volume and weight. This relation was obtained from real engine data as shown in
the mass of intake air. For this reason the optimization was conducted using BMEP, which was
converted to SFC during post processing. Constraints are made up of four main components. The first is
a relation between basic engine parameters and power, the “iPLAN” formula, which is
. This is a first principles calculation. When the brake mean effective
pressure is used in the formula typical inefficiencies such as friction are already taken into account, so
the formula yields an accurate prediction. Most containerships do not use reduction gears, so there is
no need for intermediate gearing efficiency or selection calculations between the engine and propeller.
ponent is a regression relation between the same major engine parameters and engine
weight. This relation was developed from published Wärtsilä two-stroke marine diesel data. The third
ationship between engine weight and engine room volume repeated in the NA
(Parsons M. , 2007) from Practical Ship Design (Watson, 1998). A ship
capacity is usually either volume limited (low density cargo) or weight limited (high density cargo).
Containerships fall into the volume limited category such that engine room volume is a more critical
factor than the weight of the engine itself. The final component is a set of practical constraints on the
ased on current engines.
Figure 5.1 Engine Fuel Consumption Regression
The first component of the objective function is a regression relation between the engine’s internal
ght. This relation was obtained from real engine data as shown in Figure
Page | 41
the mass of intake air. For this reason the optimization was conducted using BMEP, which was
converted to SFC during post processing. Constraints are made up of four main components. The first is
found in the
. This is a first principles calculation. When the brake mean effective
re already taken into account, so
the formula yields an accurate prediction. Most containerships do not use reduction gears, so there is
no need for intermediate gearing efficiency or selection calculations between the engine and propeller.
ponent is a regression relation between the same major engine parameters and engine
stroke marine diesel data. The third
m volume repeated in the NA
. A ship’s carrying
imited (high density cargo).
Containerships fall into the volume limited category such that engine room volume is a more critical
factor than the weight of the engine itself. The final component is a set of practical constraints on the
The first component of the objective function is a regression relation between the engine’s internal
Figure 5.2, resulting in

Equation 56. The second component of the objective function is simple regression estimate of the
relation between engine weight and engine room volume from Practical Ship Design
Combining Equation 56 and Equation
Figure
q�S
min
5.1.2 Constraints
5.1.2.1 Equality Constraint
The basis of the equality constraint is
approximated by multiplying the number of cylinders, brake mean effective pressure, length of stroke,
area of piston and rotation rate together.
relation between the required engine effective power and rotation r
variables, as shown in Equation 60.
derived from engine manufacturers published data. Effective engine pow
. The second component of the objective function is simple regression estimate of the
engine weight and engine room volume from Practical Ship Design (Watson, 1998)
Equation 57 yields the objective function Equation 58.
Figure 5.2 Engine Weight vs. Volume Regression
, �:, A�� � y� � 89.513S�:A��."$*$
Equation 56 Engine Weight Regression
q�y�� � y�D � 6.25 � y�
Equation 57 Engine Volume Regression
min qS, �:, A�� � 559.456S�:A��."$*$
Equation 58 Objective Function
The basis of the equality constraint is Equation 59, the “iPLAN” formula, where engine power is
multiplying the number of cylinders, brake mean effective pressure, length of stroke,
area of piston and rotation rate together. This manipulated equation serves as an equality constraint
relation between the required engine effective power and rotation rate to the rest of the engine
. The “iPLAN” formula is extremely accurate as evidenced in
derived from engine manufacturers published data. Effective engine power and the rotation rate served
Page | 42
. The second component of the objective function is simple regression estimate of the
(Watson, 1998).
, the “iPLAN” formula, where engine power is
multiplying the number of cylinders, brake mean effective pressure, length of stroke,
anipulated equation serves as an equality constraint
ate to the rest of the engine
The “iPLAN” formula is extremely accurate as evidenced in Table 5.1
er and the rotation rate served

Page | 43
as parameters to be input from propeller optimization, while the number of cylinders, length of stroke,
area of piston and brake mean effective pressure acted as variables.
���, �, ��, ��, �� = �� = �������
Equation 59 “iPLAn” Forumula
ℎ�S, X, �:, A� , 5� = XT − SX�:A�5 = 0
Equation 60 Equality Constraint
Table 5.1 “iPLAN” Formula Accuracy
5.1.2.2 Inequality Constraints
The only discrete variable in the objective function was the number of cylinders. The optimizer was run
for each discrete value, with the lowest returned objective value of the set being returned. The largest
two-stroke marine diesel in the world has fourteen cylinders. The optimizer was allowed a range of 1-15.
G� � 1 − S ≤ 0
Equation 61 i Lower Bound
G� � S − 15 ≤ 0
Equation 62 I Upper Bound
The length of stroke for two-stroke marine diesels ranges from about 1.5-2.5 meters. The optimizer was
allowed a range of 1.5-2.5 meters.
Engine Rated Power [kW] iPLAN [kW] Δ
RT-flex35 6960 6973.20 0.19%
RT-flex40 9080 9092.72 0.14%
RT-flex48T 11640 11643.90 0.03%
RT-flex50 13960 13975.37 0.11%
RT-flex58T 18080 18051.87 -0.16%
RT-flex60C 21780 21757.10 -0.11%
RT-flex68 25040 25024.70 -0.06%
RT-flex82C 54240 54217.46 -0.04%
RT-flex82T 40680 40637.43 -0.10%
RT-flex84T 37800 37810.94 0.03%
RT-flex96C 80080 80105.49 0.03%
iPLAN Formula Accuracy

Page | 44
G� � 1.5 − �: ≤ 0
Equation 63 Ls Lower Bound
G# � �: − 2.5 ≤ 0
Equation 64 Ls Upper Bound
Piston area was calculated from bore size, which ranges from about 0.3-1 meter. The optimizer was
allowed a range of 0.25-1 meter. The reason for the strict upper limit on bore size is the manufacturing
process. The largest two-stroke marine diesels share a common cylinder frame for different sizes of
bores. The current largest engine has a bore of 0.96 meters, and it was not practical to go beyond that.
A� − } ����� 2� ��
= 0
Equation 65 Piston Area
G) � 0.25 − ���� ≤ 0
Equation 66 Bcyl Lower Bound
G, � ���� − 1 ≤ 0
Equation 67 Bcyl Upper Bound
Brake mean effective pressure was constrained within the typical range found in both real engine data
and the NA 331 Coursepack (Parsons, 2007), 15-30 bar.
G$ � 1500000 − X ≤ 0
Equation 68 BMEP Lower Bound
G* � X − 3000000 ≤ 0
Equation 69 BMEP Upper Bound
5.1.3 Feasibility
The model was deemed feasible for two reasons. First, the objective and constraint functions are
continuous. Additionally, all functions are monotonic within the constraint boundaries, and these
boundaries contain the complete set of feasible real world engines used to construct the model.

Page | 45
5.1.4 Model Summary
min qS, �:, A�� = 559.456S�:A��."$*$
ℎ�S, X, �:, A� , 5� = XT − SX�:A�5 = 0
G� = 1 − S ≤ 0
G� = S − 15 ≤ 0
G� = 1.5 − �: ≤ 0
G# = �: − 2.5 ≤ 0
G) = 0.25 − ���� ≤ 0
G, = ���� − 1 ≤ 0
G$ = 1500000 − X ≤ 0
G* = X − 3000000 ≤ 0
5.2 Model Analysis
5.2.1 Boundedness
The objective function monotonically increases with its three variables, i, Ls and AP. Piston area is a
dependent variable of cylinder bore, which was the variable coded. However, piston area and cylinder
bore share the same monotonicity. In a simple situation, this would lead one to believe that the lower
bounds (g1,g3,g5), which monotonically decrease with of the objective variables, could be active
constraints in a minimization. However, the equality constraint h1 also monotonically decreases with i, Ls
and AP. As the equality constraint necessarily cuts through the feasible region, the lower bounds g1, g3,
and g5 were not active.
Analyzing the equality constraint, it was observed that increasing values of BMEP, which does not
appear in the objective function, would result in decreasing values of the variables that do. The MATLAB
implementation of SQP would seek to obtain the highest value of BMEP possible, making the BMEP
upper bound an active constraint in all cases. The implementation also stepped through the number of
cylinders, making it difficult to determine whether or not g1 or g2 would be active. In order to guarantee
that the model was well bounded, all variables were constrained above and below to create a feasible

Page | 46
region in which real world engines exist. The first level monotonicity table is shown in Table 5.2.
Constraint activity for variables other than BMEP were determined from results.
Table 5.2 1st
Level Monotonicity Table
5.2.2 Constraint Activity
As predicted, the upper bound of BMEP was always an active constraint. The constraints g1, g3 and g5
were never active as described earlier. The constraint g2 was active only for high PE low BMEP situations,
which require the engine to be of larger geometric size. For the majority of low PE cases, either g4 or g6
were active. Based on this analysis, and the fact that not all independent variables were in the objective
function, it can be said that g2, g4 and g6 are semi-active constraints. An example is shown in Table 5.3,
where the test case is consistent with the other subsystems. The equality constraint h1, by definition
was always active, as was the iterated BMEP upper bound g8.
Active Constraints Pe=28651 [kW] n=0.85 [rps]
BMEP [Pa] g2 g4 g6
BMEP
[Pa] g2 g4 g6
3000000 2250000 X
2950000 2200000 X
2900000 2150000 X
2850000 2100000 X
2800000 2050000 X
2750000 2000000 X
2700000 X 1950000 X
2650000 1900000 X
2600000 1850000 X
2550000 X 1800000 X
2500000 X 1750000 X
2450000 X 1700000 X
2400000 X 1650000 X
2350000 X 1600000 X
2300000 X 1550000 X Table 5.3 Test Case Constraint Activity
f h1 g1 g2 g3 g4 g5 g6 g7 g8
i + - - +
Ls + - - +
Bcyl + - - +
P - - +
Monotonicity Table

Page | 47
5.3 Optimization Study
5.3.1 Implementation
This model was developed to explore the tradeoff between fuel consumption and engine room volume.
This relationship cannot be demonstrated with a single optimum, but rather a Pareto front. The MATLAB
implementation of SQP, fmincon ,used for this model is a single objective minimization function
incapable of developing fronts. Using monotonicity and experience, it was determined that the upper
bound on BMEP would always be active. Due to the linear relationship between BMEP and SFC, BMEP
was used within the model, and results were converted to SFC or FC as a post process. To develop the
Pareto front, the upper bound on BMEP was iteratively stepped toward its lower bound, demonstrating
the range of fuel consumptions. If no feasible solution was found, none was recorded. In this fashion,
the Pareto front was generated to whatever level of accuracy was desired. It would have been possible
to treat BMEP as a parameter in this process, but it was left as a variable to verify that g8 was in fact
always active.
An additional complication was the discrete nature of the number of cylinders. One solution was to
convert i to a continuous variable, and then evaluate the bounding values once an optimum was found.
This method was discarded as the interaction effects between i and the other variables were hard to
distinguish along the Pareto front. Instead, i was treated as a parameter, with each discrete value being
tested every iteration through the BMEP bounds. The combination of variables leading to the lowest
objective value at each BMEP step was stored. This process is illustrated in Figure 5.3.
Figure 5.3 Pareto Front Process
5.3.2 Results
The Pareto front for the test case can be seen in Figure 5.3, with a table of results shown in Table 5.4.
The constraint activity for this case is described in the previous section. It is fair to say that the high
Lower BMEP Upper Bound
SQP for each i
Record Best Solution

Page | 48
BMEP solutions are more likely to be interior optima in terms of the other variables. This is the result of
the equality constraint satisfaction, where high BMEP reduces the other variables for the same effective
power. This is evidenced in Figure 5.4. A wide range of initial conditions were tried, but the resulting
Pareto front did not change.
Figure 5.4 Engine Subsystem Test Case Results

Page | 49
Case Study Pe=28651 [kW] n=0.85 [rps]
i Ls [m] Bcyl [m] BMEP [Pa] FC [MT/h] ERV [m3]
7 2.23 0.96 3000000 5.19 6003
9 1.90 0.92 2950000 5.17 6103
8 2.01 0.96 2900000 5.16 6206
9 2.00 0.92 2850000 5.14 6312
11 1.56 0.95 2800000 5.12 6423
11 1.60 0.94 2750000 5.10 6537
7 2.28 1.00 2700000 5.09 6655
9 2.30 0.89 2650000 5.07 6778
8 2.16 0.98 2600000 5.05 6906
8 2.16 0.99 2550000 5.04 7038
9 2.50 0.88 2500000 5.02 7176
9 2.50 0.88 2450000 5.00 7319
9 2.50 0.89 2400000 4.99 7469
8 2.50 0.96 2350000 4.97 7624
8 2.50 0.97 2300000 4.95 7786
8 2.50 0.98 2250000 4.93 7956
11 1.78 1.00 2200000 4.92 8133
13 2.50 0.78 2150000 4.90 8242
11 1.87 1.00 2100000 4.88 8511
9 2.50 0.97 2050000 4.87 8714
9 2.50 0.98 2000000 4.85 8928
10 2.49 0.94 1950000 4.83 9152
11 2.07 1.00 1900000 4.82 9387
10 2.50 0.97 1850000 4.80 9635
11 2.18 1.00 1800000 4.78 9897
12 2.06 1.00 1750000 4.76 10174
11 2.50 0.96 1700000 4.75 10467
11 2.50 0.98 1650000 4.73 10777
12 2.25 1.00 1600000 4.71 11107
12 2.50 0.96 1550000 4.70 11457 Table 5.4: Case Study Pareto Front Data
Another case study was run with a higher effective power and revolution rate. The results are shown in
Table 5.5. As BMEP is decreased, it becomes apparent that Ls is more of a limiting factor on the optimum
than Bcyl. Once Ls has reached its maximum allowable size of 2.5m, the optimizer can only vary the
number of cylinders or Bcyl. These two remaining variables then alternate between similar values to
continually satisfy the equality constraint h1. After BMEP has decreased past 1,800,000 Pascals, no
feasible solution exists without increasing one of the variable constraint bounds.

Page | 50
Case Study Pe=75000 [kW] n=1.5 [rps]
i
Ls
[m]
Bcyl
[m]
BMEP
[Pa] SFC [g/kWh] ERV [m3]
9 2.36 1.00 3000000 181.14 8781.92
10 2.42 0.94 2950000 180.55 8927.57
11 2.50 0.89 2900000 179.95 9078.19
9 2.48 1.00 2850000 179.36 9234.03
10 2.33 0.99 2800000 178.76 9395.38
11 2.50 0.92 2750000 178.17 9562.54
10 2.36 1.00 2700000 177.58 9735.82
10 2.50 0.98 2650000 176.98 9915.56
11 2.50 0.94 2600000 176.39 10102.15
10 2.50 1.00 2550000 175.80 10295.97
11 2.50 0.96 2500000 175.20 10497.46
14 1.86 1.00 2450000 174.61 10707.08
14 1.89 1.00 2400000 174.02 10925.35
12 2.50 0.95 2350000 173.42 11152.80
13 2.50 0.92 2300000 172.83 11390.03
12 2.50 0.97 2250000 172.23 11637.70
14 2.50 0.91 2200000 171.64 11896.49
13 2.50 0.95 2150000 171.05 12167.20
13 2.50 0.97 2100000 170.45 12450.65
13 2.50 0.98 2050000 169.86 12747.78
13 2.50 0.99 2000000 169.27 13059.60
14 2.50 0.97 1950000 168.67 13387.24
15 2.50 0.95 1900000 168.08 13731.94
14 2.50 0.99 1850000 167.49 14095.07
15 2.50 0.97 1800000 166.89 14478.14 Table 5.5: Second Case Study Pareto Front Data
5.3.3 Model Validation
To further validate the model, it was compared against published engine data. The effective power and
rotation rate were matched to those published and the optimizer was run. The results are seen in Figure
5.5. The blue points are the Pareto front generated by the optimizer. The red point is the actual engine
as published, and the green point is what the model predicts based on the published engine variables. It
should be noted that the model does not accurately predict the same value of each variable, merely the
value of the objective function. In this case, the model is using a much fewer number of cylinders, but a
larger bore and stroke. The model could have almost exactly matched the real engine objective values if
the Pareto front was resolved to a higher level of detail. These comparisons are summarized in Table
5.6.

Page | 51
Figure 5.5 Engine Subsystem Model Validation
Model Validation
i Ls [m] Bcyl BMEP [bar] SFC [g/kWh] EW [MT] ERV* [m3]
Real Engine 9 2.25 0.6 20 171 480 3000
Model Predicted Real
Engine 9 2.25 0.6 20 169.26 493 3086
Nearest Pareto point to
Real Engine 3 2.5 0.97 20.5 169.86 483 3016
* This is EWx6.25 in all cases Table 5.6 Model Validation Data
Not all validation runs were as exact as this case, as shown in Figure 5.6 for other engines in the same
series. It should be noted that the gaps in the Pareto fronts are due to discrete cylinder number jumps.
As a test, the geometric constraints were slightly relaxed and the resulting fronts did not have gaps. The
model validation shows that the optimizer is not capable of predicting a set of engine variables, but can
accurately predict engine weight and fuel consumption. The engine room volume prediction is only as
good as Equation 57, for which real world validation data is difficult to obtain.

Page | 52
Figure 5.6 Multiple Engine Subsystem Model Validation
5.4 Parametric Studies
Figure 5.7 shows the resulting Pareto fronts when effective power is lowered from 100,000 KW to only
10,000 KW. What is interesting about this case is that with high engine powers, the lower range of SFC is
not available, as the upper bounds on Bcyl, i and or Ls are active such that BMEP cannot be lowered any
further. At some point, around 80,0000 KW the complete range of SFC is available. Obviously, lower
power engines require less ERV as is evidenced.

Page | 53
Figure 5.7 Variation of Effective Power, Constant rps (1.5)
Figure 5.8 shows the same data, except that FC is plotted on the x-axis. Fuel Consumption is merely the
SFC multiplied by the effective power. What is interesting about this plot is that an 80,000 KW engine
could actually take up more volume than a 100,000 KW engine. The explanation is that with the higher
engine powers the lower range of BMEP is not available, requiring them to utilize the upper end of the
BMEP options and subsequently less volume. The largest 80,000 KW engine has a lower pressure
capability, requiring more volume. This interesting feature is a symptom of the model, rather than the
real world behavior. If the BMEP step in the implementation loop was smaller it would be shown that
the larger engines share the same maximum ERV. This is because the maximum ERV is defined by upper
engine variable constraint bounds. So long as the lowest feasible BMEP is greater than its lower bound,
the maximum ERV of every engine would be the same. The course BMEP step prevents this from
showing in Figure 5.8. Also note that this feature is also visible in Figure 5.7. Please note that the (0,0)
point in Figure 5.8 is not part of the data set, merely a consequence of bad coding.

Page | 54
Figure 5.8 Variation of Effective Power, Constant rps (1.5)
Figure 5.9 shows an opposite trend to the preceding two figures. As the revolution rate decreases, the
ERV increases. After the rps decreases enough, the lower bound on BMEP is no longer active, and the
equality constraint takes over. At this point, the minimum fuel consumption gets steadily higher as well.
The general trend shown by these two parametric studies is that the minimum ERV is obtained by the
higher revolution rates and higher fuel consumptions. Additionally, and obviously, lower power engines
take up less volume. The second study shows that a higher rps can decrease fuel consumption and
engine room volume. If the engine subsystem were considered alone, the optimal solution set would
have higher revolution rates.

Page | 55
Figure 5.9 Decreasing rps, Constant Effective Power (75,000 kW)
5.5 Results Discussion
The design implications of the engine subsystem results are as follows. First, the smallest engine room
volumes will be achieved with the highest fuel consumption, illustrating the tradeoff this model was
designed to explore. Secondly, higher power engines do not offer a designer as much freedom along the
Pareto front as lower power engines. As engine power is increased, the physical constraint boundaries
limit the range of feasible solutions. Lastly, a higher revolution rate decreases both engine room volume
and fuel consumption. Typical containerships have direct drive systems, meaning that the revolution
rate of the propeller and engine are the same. Utilizing the engine subsystem results alone would imply
that a faster revolution rate would result in a better global Pareto front. Unfortunately, propellers
perform better at slower speeds as shown in the preceding propeller subsystem discussion. The hull
form parameters affect propeller performance, which indirectly will influence the engine subsystem as
well.

Page | 56
6 System Integration Study
The hull-propeller-engine system is optimized to create the fuel consumption-engine room volume
tradeoff. For each individual subsystem, this is obtained by optimizing for an individual goal. The
propeller is optimized for efficiency while meeting requirements for required thrust. The hull is
designed to minimize the resistance while being able to carry the required amount of cargo. The engine
is designed for fuel efficiency while taking as little space in the hull as possible to maximize the amount
of cargo that can be carried.
6.1 Subsystem Tradeoffs
When the three systems are integrated tradeoffs must be made to find the Pareto front. The hull and
propeller interaction involves tradeoffs with space for the propeller and minimizing the resistance. For
the most efficient propeller, the largest diameter should be used. However, in order to increase the
diameter of the propeller, the draft of the ship must be increased. This increase in draft can increase
the resistance of the hull, and also can be restricted by stability criteria. Other tradeoffs exist between
the engine and propeller. As the engine power increases the propeller efficiency can be increased.
However, increasing power decreases engine efficiency and increases the necessary volume reducing
cargo capacity.
There is a general progression that the subsystem optimizations occur in for the global optimization.
The global optimum is a combination of tradeoffs between reducing resistance of the hull, increasing
efficiency of the propeller, and the tradeoff between engine room volume and fuel consumption. These
tradeoffs occur using certain variables from one subsystem as parameters in others as well as variables
being affected across multiple subsystems. The global optimization that occurs after combining the
subsystems cannot be predicted using basic naval architecture principles. This is a complicated problem
that is usually completed in iterative steps and is known as the design spiral in the marine industry. The
spiral outlines a method to develop a feasible ship design that requires you to revisit aspects of the
design as more detailed analysis is completed.
6.2 Methodology
Initially the overall system integration was going to be a global “All-in-one” optimization. Integrating the
systems greatly increased the complexity of the code and deciding on weights for the individual
functions as well as scaling considerations became difficult. However, the interaction variables between
systems were known. Since the interactions variables were known the sharing process could be

Page | 57
simplified from the “All in One” approach.. Instead of having variables shared between systems, vectors
of decision variables of one subsystem became parameters in the remaining subsystems.
Knowing the interactions a priori allowed the system optimization to be handled in a sequential manner.
The main interaction that needed to be examined was the relationship between hull draft, hull
resistance, and propeller efficiency. Vectors of resistances and corresponding drafts from the hull
optimization were used as parameters in the propeller optimization subsystem. The propeller
optimization algorithm then output vectors of required engine power, and required engine revolution
rates. To approach the problem, the case study ship of 75,000 m3 and 18 knots was examined.
The optimum propeller efficiency was nearly always at the largest draft possible, while the lowest
resistance may be at a smaller draft. That there was an interaction was known before running the
optimization. In an “All in One” it would be unclear how much weight should be put on each subsystem..
This would be more complicated because the weighting would assume that the integrated system
behaves in the same fashion for different inputs, which was not always the case as shown with varying
constraint activity in the subsystems.
The engine subsystem creates a Pareto Front for each of the input engine rps and required power when
the hull and propeller systems are finished with iterating the range of input drafts. The Pareto front
examines the different tradeoffs between fuel consumption and engine room volume. By examining the
Pareto Front for the entire system design selections can be made. Due to lack of further information the
point closest to utopia was chosen. If data was known on fuel prices or cargo rates further tradeoffs
could be examined. For example, if cargo prices are high, the designer may be willing to give up fuel
efficiency for more cargo volume. Figure 6.1 visually shows the sequential optimization process.

Figure
6.3 System Optimization Results
The results of the integrated system optimization are presented similarly to the engine subsystem. For
this study, the same objective that the engine subsystem had
A tradeoff of fuel consumption to engine
subsystem optimization was calculated for was considered for the integrated system. The ship speed
was 18 knots and the volume was 75,000 cubic meters. Feasible solutions were generated and a Pareto
front was formed. Figure 6.2 shows both the feasible solutions as well as the Pareto front. From the
Pareto front, the group selected a design using the n
utopian point is the point where both objectives are thei
never be reached, but the selection process uses the distance from this point to select the final design.
Figure 6.2 shows the selected design as the green dot. This point on the lef
the shortest distance from the utopian because the scaling of the figure is warped. After rescaling the
figure, which can be seen on the right, the selected design looks closer to the utopian. Using
engineering judgment, it was determined that the selected design would be close to what an actual
engineer would pick manually.
Figure 6.1 System Optimization Sequence
System Optimization Results
egrated system optimization are presented similarly to the engine subsystem. For
ve that the engine subsystem had was also the global optimization objective.
A tradeoff of fuel consumption to engine room volume was evaluated. The case study that each
subsystem optimization was calculated for was considered for the integrated system. The ship speed
was 18 knots and the volume was 75,000 cubic meters. Feasible solutions were generated and a Pareto
shows both the feasible solutions as well as the Pareto front. From the
up selected a design using the nearest to the Utopian selection process. The
utopian point is the point where both objectives are their smallest respective values. This point can
never be reached, but the selection process uses the distance from this point to select the final design.
shows the selected design as the green dot. This point on the left figure does not look like it is
the shortest distance from the utopian because the scaling of the figure is warped. After rescaling the
figure, which can be seen on the right, the selected design looks closer to the utopian. Using
it was determined that the selected design would be close to what an actual
Page | 58
egrated system optimization are presented similarly to the engine subsystem. For
was also the global optimization objective.
The case study that each
subsystem optimization was calculated for was considered for the integrated system. The ship speed
was 18 knots and the volume was 75,000 cubic meters. Feasible solutions were generated and a Pareto
shows both the feasible solutions as well as the Pareto front. From the
earest to the Utopian selection process. The
r smallest respective values. This point can
never be reached, but the selection process uses the distance from this point to select the final design.
t figure does not look like it is
the shortest distance from the utopian because the scaling of the figure is warped. After rescaling the
figure, which can be seen on the right, the selected design looks closer to the utopian. Using
it was determined that the selected design would be close to what an actual
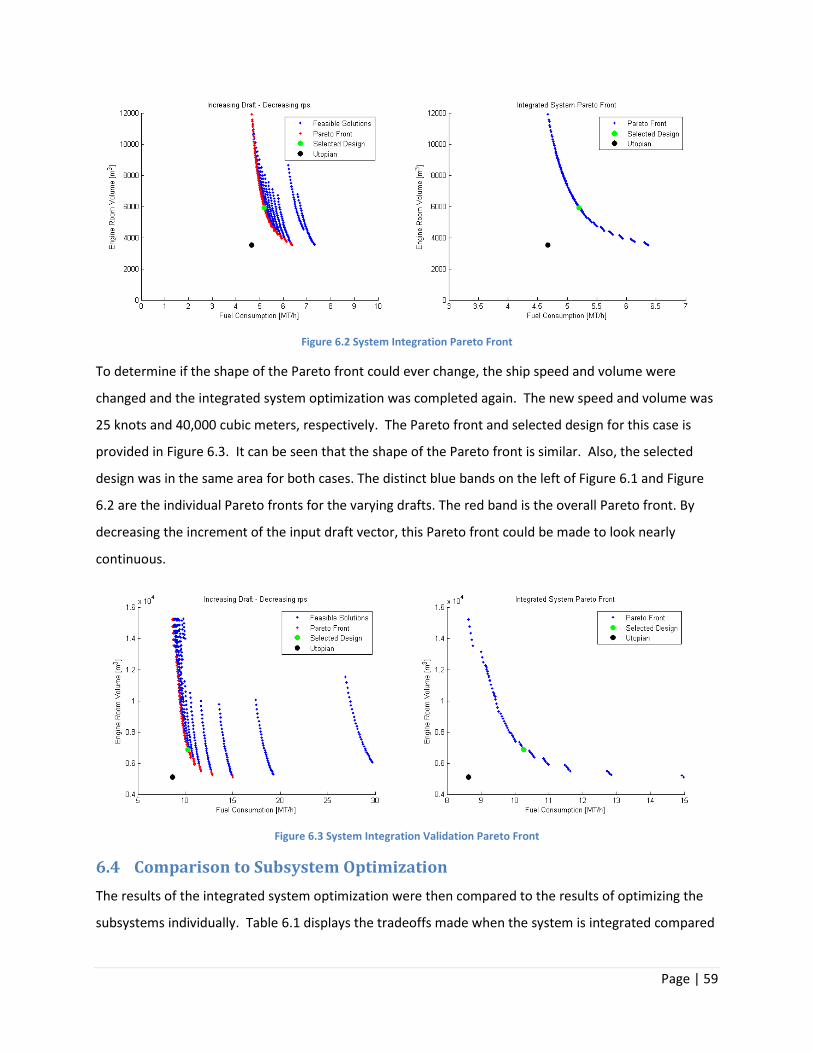
Page | 59
Figure 6.2 System Integration Pareto Front
To determine if the shape of the Pareto front could ever change, the ship speed and volume were
changed and the integrated system optimization was completed again. The new speed and volume was
25 knots and 40,000 cubic meters, respectively. The Pareto front and selected design for this case is
provided in Figure 6.3. It can be seen that the shape of the Pareto front is similar. Also, the selected
design was in the same area for both cases. The distinct blue bands on the left of Figure 6.1 and Figure
6.2 are the individual Pareto fronts for the varying drafts. The red band is the overall Pareto front. By
decreasing the increment of the input draft vector, this Pareto front could be made to look nearly
continuous.
Figure 6.3 System Integration Validation Pareto Front
6.4 Comparison to Subsystem Optimization
The results of the integrated system optimization were then compared to the results of optimizing the
subsystems individually. Table 6.1 displays the tradeoffs made when the system is integrated compared

Page | 60
to the individually optimized subsystems. The table shows that although the required thrust due to
resistance and propeller efficiency are less than optimal, a better point between engine room volume
and fuel efficiency can be found.
For the required volume and speed used, the optimal draft is near the limits of the optimization model
used. This gives results for the hull form optimization and propeller optimization that are close in final
outputs for engine room volume and fuel consumption. The major tradeoff became losing fuel
efficiency for a higher BMEP, which allows for smaller engines capable of the same power. The overall
system optimization results in a 28.9% decrease in engine room volume with only a 6.1% increase in fuel
consumption. The integrated system uses a draft of 14.5, compared to 14.64 meters for the hull
subsystem optimization and 15 meters for the propeller. The required thrust from the hull subsystem
optimization is nearly constant in the integrated system, and the propeller efficiency is decreased only
slightly. These results imply that for this hull the engine or propeller optimum main parameters would
be acceptable, the real tradeoff is within the engine room with BMEP. This result may vary with different
input parameters.
Solution Comparison ∇=75,000 m3 Vs=18 knots
Hull Form Propeller Int. System
Tm [m] 14.64 15 14.5
RT [kN] 1036.5 1036.7 1036.6
ηo 0.723 0.723 0.721
PE [kW] 28651 28491 28720
BMEP [bar] 21.5 21.5 30
n [rps] 0.85 0.8 0.86
Min FC [MT/h] 4.69 4.67 4.69
ERV [m3] 6003 6248 3512
Selected FC [MT/h] 4.9 4.9 5.2
ERV [m3] 8318 8656 5912 Table 6.1 Subsystem Optimization Comparison
6.5 Integrated System Parametric Study
Several parameter values were entered into the combined system to find how they affected the design.
The parameters that were examined were hull resistance, propeller rps, propeller efficiency, draft, and
effective power. For each of the parameters examined, the minimum engine room volumes and fuel
consumptions were found over the reasonable ranges of parameter values. By completing the

Page | 61
parametric study it can be observed how changing aspects of the hull or propeller will influence the
optimal design.
The first parameter examined was the hull resistance. Figure 6.4 shows the relationship between engine
room volume and fuel consumption when compared to different ship hull resistances. For the higher
range of increasing resistance the engine room volume varies little. The fuel consumption on the other
hand increases more drastically with increasing resistance. This implies that changing resistance could
improve fuel efficiency greatly, without having much impact on engine room volume. On the low range,
this relationship does not hold. The near vertical line on the left of the figures shows where there are a
broader range of options available. This corresponds to the steepest part of the Pareto front shown in
Figure 6.2, and near the selected design.
Figure 6.4: Engine Room Volume and Fuel Consumption vs. Resistance
The propeller revolutions per second also influenced the engine room volume and fuel consumption of
the combined system. As when the resistance was increased for higher ranges, changing the propeller
rps had a larger affect on the fuel consumption than engine room volume. In the lower range, this
relationship does not hold. This can be seen in Figure 6.5.

Page | 62
Figure 6.5: Engine Room Volume and Fuel Consumption vs. Propeller RPS
Figure 6.6 shows an opposite trend to the proceeding two relationships. Higher drafts generally result in
larger and more efficient propellers, yet slower revolution rates. This can be seen as the explosion of
engine room volume on the right of the figure. These slower engines generally had lower fuel
consumption because less overall power was being demanded. The integrated system optimum
occurred in the higher draft range, just before the engine room volume explodes.

Page | 63
Figure 6.6 Engine Room Volume and Fuel Consumption vs. Draft
As seen in Figure 6.7, the BMEP trend is similar to the other trends. However, ERV more steadily
decreases with increasing BMEP, as fuel consumption increases. This more continuous and linear-like
relationship is probably why the optimum solution for the test case varied from the subsystem
optimums mainly through BMEP. The linearity with fuel consumption is partially due to the linear
relationship between specific fuel consumption and BMEP. It is important to remember that fuel
consumption takes the engine power into account whereas specific fuel consumption does not. As an
example, a more powerful engine with the same SFC will have a higher FC. The vertical bands on the
right of the two figures are created from different rps values. A higher rps also increases fuel
consumption and decreases engine room volume.

Page | 64
Figure 6.7 Engine Room Volume and Fuel Consumption vs. BMEP
The remainder of the parametric studies show trends similar to the ones presented above. They do not
lend any more insight into the model, but are available upon request.
6.6 Conclusions
The optimization study completed for the integrated system provides valuable insights and methods of
improving ship design during the initial design stages. A process that is typically completed individually
with little communication between systems can now be completed as one while incorporating the
known design tradeoffs. The results show that the interactions between the resistance and propeller
subsystems can be predicted. The combination of all three subsystems is the most interesting and
challenging aspect of this optimization study. Instead of simply choosing an engine from a catalog that
meets power requirements, a more in depth analysis can reveal other alternatives that allow the
designer to choose a more optimal design. Although this optimization study provided valuable insights,
it is important to note that this is a simple analysis based on regression analysis that does not apply to
all ship designs. Further work should be completed in an attempt to fully optimize the propulsion
system on more types of ships as well as improving on certain assumptions made for simplicity
purposes.

Page | 65
7 Bibliography
Bernitsas, M. M., & Ray, D. (1982). Optimal Revolution B-Series Propellers. Ann Arbor: The University of
Michigan Department of Naval Architecture and Marine Engineering.
Bernitsas, M. M., Ray, D., & Kinley, P. (1981). KT, KQ and Efficiency Curves for the Waneningen B-Series
Propellers. Ann Arbor: University of Michigan Department of Naval Architecture and Marine
Engineering.
Holtrop, J. (1984). A Statistical Re-Analysis of Resistance and Propulsion Data. International Shipbuilding
Progress , 272-276.
Holtrop, J., & Mennen, G. (1982). An Approximate Power Prediction Method. International Shipbuilding
Progress , 166-170.
Parsons, M. (2007). Informal Course Notes for NA331 Marine Engineering I. Ann Arbor: University of
Michigan Department of Naval Architecture and Marine Engineering.
Parsons, M. (2007). Informal Ship Design Course Notes for NA470 Foundations of Ship Design and NA570
Advanced Marine Design. University of Michigan Department of Naval Architecture and Marine
Engineering.
Van Manen, J., & Van Oossanen, P. (1988). Propulsion. In E. V. Lewis, Principles of Naval Architecture
Volume II (pp. 127-240). Jersey City: The Society of Naval Architects and Marine Engineers.
Wärtsilä. (n.d.). Wärtsilä RT-flex96C and RTA96C. Retrieved February 2010, from Wärtsilä:
http://www.wartsila.com/,en,productsservices,productdetail,product,106F8B1D-FFFA-400A-9F3A-
7C4B5FBF7A47,5B676C68-5794-4765-AB44-4077CD1BF36F,,8001.htm
Watson, D. (1998). Practical Ship Design. Oxford: Elsevier Science Ltd.

Page | 66
Appendix A Hull Code
1. Hull Optimization Code
clear all
global g Vs Cwp Cm xcb atr Cstern Sapp Abt hb vol Cp
options = optimset('Display','iter','MaxFunEvals',1000);
% SHIP VARIABLES Tm = 8; % draft at midship in [m] lwl = 200; % length of waterline [m] bwl = 25; % breadth of waterline [m] Cb = 0.3; D = 14;
%PARAMETERS %velocity Vskn = 18; Vs = Vskn / 3.6 * 1.852; % ship speed in [m/s]
%optimization A=[]; b=[]; Aeq=[]; beq=[]; lb=[0,0,0,0,0]; ub=[20,800,100,1,50];
[Rtopt,Rt,exitflag,ouput] =
fmincon('resistance',[Tm,lwl,bwl,Cb,D],A,b,Aeq,beq,lb,ub,'constraints',option
s)
2. Hull Objective Function
% Function holtrop - calculate ship total resistance using holtrop-mennen
systematic series % % Valid ship dimensions and valid main paramenters for the use of this method
can be found in % literature mentioned below. % Version 0.01 % % This function was uploaded to the Scilab contribution page and is freely
available % from http:%www.scilab.org/contrib/index_contrib.php?page=download.php % You are free to use, redistribute and modify this function, as long as the
author % and source are mentioned. The author won't guarantee or take responsability
for any of the % results given by this function, nor give any support.

Page | 67
% % all formulas and nomenclature are taken from following articles: % 1. Holtrop, J. & Mennen, G.: "An Approximate Power Prediction Method" % International Shipbuilding Progress vol. 329, pp166-170, 1982 % 2. Holtrop, J.: "A Statistical Re-Analysis of Resistance and Propulsion
Data" % International Shipbuilding Progress vol. 353, pp272-276, 1984 % % output parameters % Rt: list, total ship resistance in [kN] (if rho is given in tons/m^3), else
in [N].
function [Rt] = resistance(x)
global g Vs Cwp Cm xcb atr Cstern Sapp Abt hb vol Cp
%CONSTANTS (gravitation, density and viscosity) if not existant g=9.81; % g in [m/s^2] rho=1.025; % salt water density in tons/m^3 nu=1.19e-6; % kin. visc. in [m^2/s]
% SHIP VARIABLES Tm = x(1); % draft at midship in [m] lwl = x(2); % length of waterline [m] bwl = x(3); % breadth of waterline [m] Cb = x(4);
%SHIP PARAMETERS %velocity %Vskn = 25; %Vs = Vskn / 3.6 * 1.852; % ship speed in [m/s] % waterplane area coefficient Cwp=0.75; % Mid section coeff. Cm = 0.98; % longitudinal center of buoyancy [m] from midship section (+fwd, -aft) xcb = -4.141 ; % submerged area of transom [m^2] atr = 16; % Cstern: % Pram with gondola -25 % V-shaped sections -10 % Normal section shape 0 % U-shaped sections % with Hogner stern 10 Cstern = 10; % Sapp is area of appendages Sapp = 50; % Abt is transversal area of bulb at Fpp in [m^2] Abt = 20; % hb is center of area of Abt in [m] from keelline hb = 4;
%SUBSET CALCULATIONS vol = Cb*lwl*bwl*Tm; % volume of ship in [m^3].

Page | 68
sw = lwl.*(2.*Tm+bwl).*sqrt(Cm).*(0.453+0.4425*Cb-0.2862.*Cm-
0.003467.*(bwl./Tm)+0.3696.*Cwp)+2.38.*(Abt./Cb); % wetted surface in [m^2] Cp = vol./(Cm.*bwl.*Tm.*lwl); % prismatic coeff. ref. Lwl according to
Holtrop c14 = 1+0.011*Cstern; ams = Cm.*bwl.*Tm;
% resistance components with same nomenclatre as Holtrop-Mennen 82 & 84 % "an approximate power prediction method"
% lcb according to Holtrop lcb = 100 .* xcb ./ lwl; % Lr acc. Holtrop Lr = lwl .* (-Cp + 1 + (0.06.*Cp.*lcb)./(4.*Cp -1)); % calculate angle of entrance if not known ie = 1 + 89.*exp(-((lwl./bwl).^0.80856).*((1-Cwp).^0.30484).*((1-Cp-
0.0225.*lcb).^0.6367).*... ((Lr./bwl).^0.34574).*((100.*vol./(lwl.^3)).^0.16302)); % dummy form factor of appendages if not found k2 = 0.5; % calculate coefficients if bwl/lwl < 0.11 c7 = 0.229577.*(bwl./lwl).^0.33333; elseif (bwl/lwl >= 0.11) && (bwl/lwl < 0.25) c7 = bwl./lwl; else c7 = 0.5 - 0.0625.*lwl./bwl; end % calculate c16 if Cp < 0.8 c16 = 8.07981 * Cp - 13.8673 * Cp^2 + 6.984388 * Cp^3; else c16 = 1.73014 - 0.7067 * Cp; end % c15 if (lwl^3 / vol) < 512 c15 = -1.69385; elseif (lwl^3 / vol) >= 1726.91 c15 = 0; else c15 = -1.69385 + (lwl/(vol^(1/3)) - 8) / 2.36; end % calculate c2 and c3 c3 = 0.56 * (Abt^1.5) / (bwl*Tm*(0.31*(Abt)^0.5 + Tm - hb)); c2 = exp(-1.89*(c3)^0.5); % calculate lambda if lwl/bwl < 12 lambda = 1.446 * Cp - (0.03 * lwl / bwl); else lambda = 1.446 * Cp - 0.36; end
if Tm/lwl > 0.04 c4 = 0.04; else c4 = Tm/lwl;

Page | 69
end % form factor calculation k1 = (0.487118 *
c14).*((bwl./lwl).^1.06806).*((Tm./lwl).^0.46106).*((lwl./Lr).^0.121563).*... (((lwl.^3)./vol).^0.36486).*((1-Cp).^(-0.604247))+0.93-1; % other factors m1 = 0.0140407 * lwl./Tm -1.75254 .* (vol.^(1/3))./lwl - 4.79323 .* bwl./lwl
- c16; m3 = -7.2035.*((bwl./lwl).^0.326869).*((Tm./bwl).^0.605375); c1 = 2223105*(c7.^3.78613).*((Tm./bwl).^1.07961).*((90-ie).^(-1.37565)); c5 = 1 - (0.8 .* atr ./ ams); c17 = 6919.3.* (Cm.^(-1.3346)) .* ((vol./(lwl^3)).^2.00977) .* ((lwl./bwl -
2).^1.40692); m404 = c15 .* (0.4.*exp(-0.034.*(0.4.^(-3.29)))); m4055 = c15 .* (0.4.*exp(-0.034.*(0.55.^(-3.29)))); % ship-model correlation factor Ca = 0.006 .* ((lwl + 100).^(-0.16)) - 0.00205 +
0.003.*((lwl./7.5).^0.5).*Cb.^4 .*c2.*(0.04-c4); % calculate Holtrop-Mennen calm water resistance % calculate Rf Rn=Vs .* lwl ./ nu; cf= 0.075 ./ (log10(Rn)-2).^2; Rf = 1/2 .* rho .* Vs^2 .* sw .* cf; % calculate velocity dependant coefficients for Rw Fn = Vs./(lwl.*g).^0.5; m4 = c15 .* (0.4.*exp(-0.034.*(Fn.^(-3.29)))); % calculate wave resistance Rw_a (for Fn < 0.4) Rw_a = c1 .* c2 .* c5 .* vol .* rho .* g .* exp(m1 .* (Fn.^(-0.9)) + m4... .* cos((lambda .* (Fn.^(-2))))); % for Fn==0.4 Rw_a04 = c1 .* c2 .* c5 .* vol .* rho .* g .* exp(m1 .* (0.4.^(-0.9)) +
m404... .* cos((lambda .* (0.4.^(-2))))); % if Fn > 0.55 Rw_b Rw_b = c17 .* c2 .* c5 .* vol .* rho .* g .* exp(m3 .* (Fn.^(-0.9)) + m4... .* cos((lambda .* (Fn.^(-2))))); % for Fn ==0.55 Rw_b055 = c17 .* c2 .* c5 .* vol .* rho .* g .* exp(m3 .* (0.55.^(-0.9)) +
m4055... .* cos((lambda .* (0.55.^(-2))))); if Fn < 0.4 Rw = Rw_a; elseif Fn > 0.55 Rw = Rw_b; else % interpolation formula for values between 0.4 and 0.55 Rw = Rw_a04 + (10.*Fn - 4).*(Rw_b055 - Rw_a04)./1.5; end % calculate resistance due to presence of bulbous bow near water surface if Abt > 0 pb = 0.56 .* (Abt.^0.5) ./ (Tm - 1.5.*hb); Fni = Vs ./ (g.*(Tm - hb - 0.25.*(Abt).^0.5) + 0.15.*Vs).^0.5; Rb = 0.11 .* exp(-3.*pb.^(-2)) .* Fni^3 .* Abt.^1.5 .* rho .* g ./ (1 +
Fni.^2); else Rb = 0; end

Page | 70
if atr > 0 FnT = Vs / (2*g*atr / (bwl + bwl*Cwp))^0.5; else FnT = 0; end % calculate c6 if FnT < 5 c6 = 0.2*(1-0.2*FnT); else c6 = 0; end Rtr = 0.5 .* rho .* Vs.^2 .* atr .* c6; % calculate model-ship correlation resistance Ra = 0.5 .* rho .* Vs.^2 .* sw .* Ca; % calculate appendage resistance Rapp = (0.5 * rho * Vs * (1 + k2).*Sapp) .* cf ; % calculate total calm water resistance Rt = Rf.*(1 + k1) + Rapp + Rw + Rb + Rtr + Ra;
%endfunction
3. Hull Constraint Function
function [cong,conh] = constraints(x)
global g Vs Cwp Cm xcb atr Cstern Sapp Abt hb vol Cp
%stability constraint
Cvp = x(4)/Cwp; KB = x(1)*(Cwp/(x(4)+Cwp)); KG = 0.7*x(5); Ci = 0.0937*Cp-0.0122; It = Ci*x(2)*x(3)^3; BM = It/vol; KM = KB + BM; GM = KM - KG;
%inequality constraints cong = [x(1)-15;x(2)-366;x(3)-49;-Vs/sqrt(x(2));Vs/sqrt(x(2))-2.0;0.01-
Vs/sqrt(g*x(2));Vs/sqrt(g*x(2))-0.55;... 2.1-x(3)/x(1);x(3)/x(1)-4.0;0.55-Cp;Cp-0.85;3.9-x(2)/x(3);x(2)/x(3)-
14.9;4-x(5)+x(1);0.5-GM;1.65-x(3)/x(5)];
%equality constraints conh = [x(4)*x(2)*x(3)*x(1)-75000];

Page | 71
Appendix B Propeller Code
1. Propeller Optimization Code
% Setting up and Running Optimization Code clear all close all clc % x(1) = J; x(2) = P/D; x(3) = AE/AO; x(4) = Z global ktJsquared kqJcubed kt kq H T rho D Z eta0 = zeros(1,4); for i = 3:7 % Defining input parameters from ship and engine Draft = 14.6382; %meters D = Draft*.9; %meters t = .155; V = 9.26; % m/s rho = 1025; % kg/m^3 Rt = 1036*10^3; %newtons w = .252; dhp = 40000*550*0.745699872; %kw H = Draft - D/2; %meters T = Rt/(1-t); %newtons Z = i; Va = V*(1-w);%m/s
% Coefficients for nonlinear constraints ktJsquared = Rt/((1-t)*V^2*(1-w)^2*D^2*rho); kqJcubed = dhp/(2*pi*D^2*(1-w)^3*V^3*rho);
% Set Options for fmincon options = optimset('Display','iter','LargeScale','off'); % Define upper and lower bounds on design variables A = []; b = []; Aeq = []; beq = []; lb = [0,.5,.3,2]; ub = [1.6,1.4,1.05,8]; % Define initial starting point x0 = [1,1.2,.65,Z];
[xopt,fval,exitflag,output] = fmincon('FUN',x0,A,b,Aeq,beq,lb,ub,... 'CONSTRAINTS2'); eta0(i-2) = fval; ktmax(i-2) = kt; kqmax(i-2) = kq; exitflags(i-2) = exitflag; xopts(i-2,1:4) = xopt; end
eta0max = abs((eta0)); for i = 1:5 nopts(i) = Va/(D*xopts(i)); Topts(i) = ktmax(i)*rho*nopts(i)^2*D^4; Rtopts(i) = Topts(i)*(1-t);

Page | 72
DHPOpts(i) = kqmax(i)*2*pi*rho*nopts(i)^3*D^5/(550*.745699872); end N = 60*nopts; BladeNumber = [3 4 5 6 7]; plot(BladeNumber,abs(eta0)); title('Blade Number Vs. Efficiency') xlabel('Blade Number') ylabel('Efficiency') axis([3 7 0 1])
2. Propeller Objective Function
function [eta0] = FUN(x) global kt kq % Objective Function % % % x(1) = J; x(2) = P/D; x(3) = AE/AO; x(4) = Z % Definition of Coefficients for the Kt and Kq regression equations
ktcoef = [ 0.00880496 0 0 0 0; ... -0.204554 1 0 0 0; ... 0.166351 0 1 0 0; ... 0.158114 0 2 0 0; ... -0.147581 2 0 1 0; ... -0.481497 1 1 1 0; ... 0.415437 0 2 1 0; ... 0.0144043 0 0 0 1; ... -0.0530054 2 0 0 1; ... 0.0143481 0 1 0 1; ... 0.0606826 1 1 0 1; ... -0.0125894 0 0 1 1; ... 0.0109689 1 0 1 1; ... -0.133698 0 3 0 0; ... 0.00638407 0 6 0 0; ... -0.00132718 2 6 0 0; ... 0.168496 3 0 1 0; ... -0.0507214 0 0 2 0; ... 0.0854559 2 0 2 0; ... -0.0504475 3 0 2 0; ... 0.010465 1 6 2 0; ... -0.00648272 2 6 2 0; ... -0.00841728 0 3 0 1; ... 0.0168424 1 3 0 1; ... -0.00102296 3 3 0 1; ... -0.0317791 0 3 1 1; ... 0.018604 1 0 2 1; ... -0.00410798 0 2 2 1; ... -0.000606848 0 0 0 2; ... -0.0049819 1 0 0 2; ... 0.0025983 2 0 0 2; ... -0.000560528 3 0 0 2; ... -0.00163652 1 2 0 2; ... -0.000328787 1 6 0 2; ... 0.000116502 2 6 0 2; ...

Page | 73
0.000690904 0 0 1 2; ... 0.00421749 0 3 1 2; ... 5.65229E-05 3 6 1 2; ... -0.00146564 0 3 2 2];
kqcoef = [ 0.00379368 0 0 0 0;... 0.00886523 2 0 0 0;... -0.032241 1 1 0 0;... 0.00344778 0 2 0 0;... -0.0408811 0 1 1 0;... -0.108009 1 1 1 0;... -0.0885381 2 1 1 0;... 0.188561 0 2 1 0;... -0.00370871 1 0 0 1;... 0.00513696 0 1 0 1;... 0.0209449 1 1 0 1;... 0.00474319 2 1 0 1;... -0.00723408 2 0 1 1;... 0.00438388 1 1 1 1;... -0.0269403 0 2 1 1;... 0.0558082 3 0 1 0;... 0.0161886 0 3 1 0;... 0.00318086 1 3 1 0;... 0.015896 0 0 2 0;... 0.0471729 1 0 2 0;... 0.0196283 3 0 2 0;... -0.0502782 0 1 2 0;... -0.030055 3 1 2 0;... 0.0417122 2 2 2 0;... -0.0397722 0 3 2 0;... -0.00350024 0 6 2 0;... -0.0106854 3 0 0 1;... 0.00110903 3 3 0 1;... -0.000313912 0 6 0 1;... 0.0035985 3 0 1 1;... -0.00142121 0 6 1 1;... -0.00383637 1 0 2 1;... 0.0126803 0 2 2 1;... -0.00318278 2 3 2 1;... 0.00334268 0 6 2 1;... -0.00183491 1 1 0 2;... 0.000112451 3 2 0 2;... -2.97228E-05 3 6 0 2;... 0.000269551 1 0 1 2;... 0.00083265 2 0 1 2;... 0.00155334 0 2 1 2;... 0.000302683 0 6 1 2;... -0.0001843 0 0 2 2;... -0.000425399 0 3 2 2;... 8.69243E-05 3 3 2 2;... -0.0004659 0 6 2 2;... 5.54194E-05 1 6 2 2];
% ------------------------------------------------------------------------- % Calculations for kt, kq,and eta0 kt = 0;

Page | 74
kq = 0; for i = 1:39 kt = kt + ktcoef(i,1) * x(1)^ktcoef(i,2) * x(2)^ktcoef(i,3) ... * x(3)^ktcoef(i,4) * x(4)^ktcoef(i,5); end for i = 1:47 kq = kq + kqcoef(i,1) * x(1)^kqcoef(i,2) * x(2)^kqcoef(i,3) ... * x(3)^kqcoef(i,4) * x(4)^kqcoef(i,5); end kt kq eta0 = -(x(1)*kt/(2*pi*kq));
3. Propeller Constraint Function
function [g,h] = CONSTRAINTS2(x) % Constraint Function % % Defines nonlinear constraints % x(1) = J; x(2) = P/D; x(3) = AE/AO; x(4) = Z global kt kq ktJsquared kqJcubed H T rho D Z AE = pi*(D/2)^2/(1.067 - 0.229*x(2));
g = [-(1.3 + .3*Z)*T/((rho*9.81*H-1700)*D^2)+.2 + x(3)]
h = [x(4) - Z; ktJsquared*x(1)^2 - kt;] %-kqJcubed*x(1)^3 + kq; ;
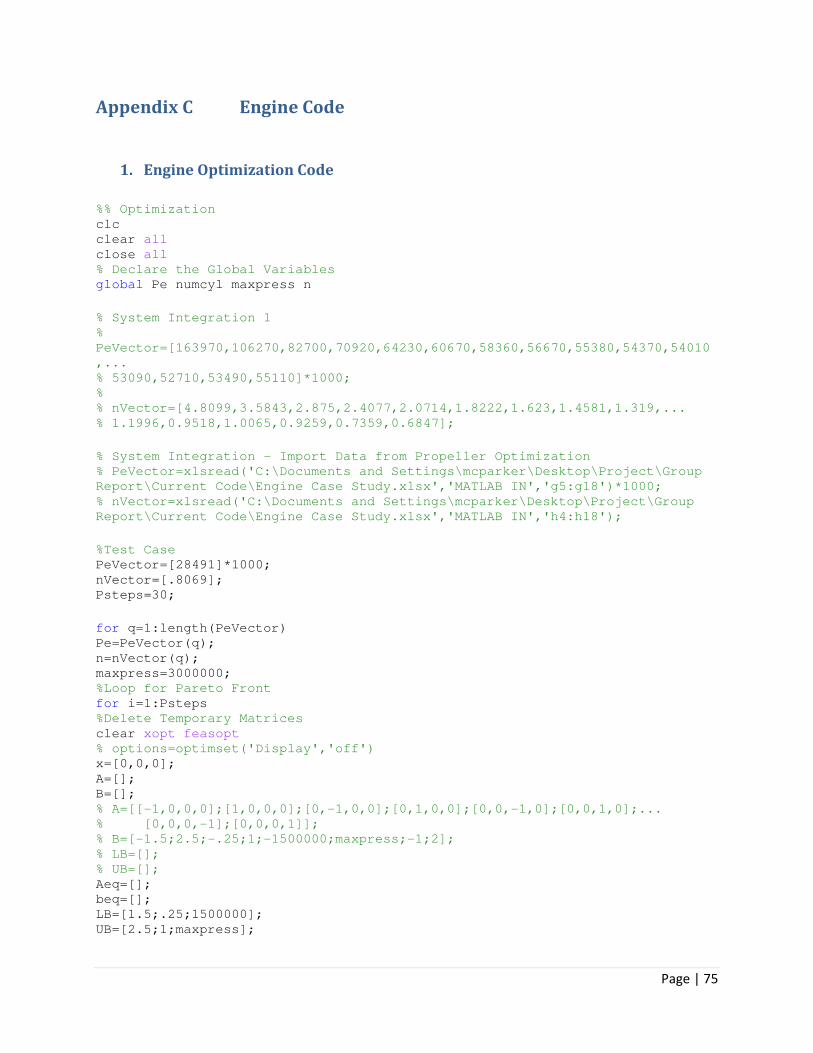
Page | 75
Appendix C Engine Code
1. Engine Optimization Code
%% Optimization clc clear all close all % Declare the Global Variables global Pe numcyl maxpress n
% System Integration 1 %
PeVector=[163970,106270,82700,70920,64230,60670,58360,56670,55380,54370,54010
,... % 53090,52710,53490,55110]*1000; % % nVector=[4.8099,3.5843,2.875,2.4077,2.0714,1.8222,1.623,1.4581,1.319,... % 1.1996,0.9518,1.0065,0.9259,0.7359,0.6847];
% System Integration - Import Data from Propeller Optimization % PeVector=xlsread('C:\Documents and Settings\mcparker\Desktop\Project\Group
Report\Current Code\Engine Case Study.xlsx','MATLAB IN','g5:g18')*1000; % nVector=xlsread('C:\Documents and Settings\mcparker\Desktop\Project\Group
Report\Current Code\Engine Case Study.xlsx','MATLAB IN','h4:h18');
%Test Case PeVector=[28491]*1000; nVector=[.8069]; Psteps=30;
for q=1:length(PeVector) Pe=PeVector(q); n=nVector(q); maxpress=3000000; %Loop for Pareto Front for i=1:Psteps %Delete Temporary Matrices clear xopt feasopt % options=optimset('Display','off') x=[0,0,0]; A=[]; B=[]; % A=[[-1,0,0,0];[1,0,0,0];[0,-1,0,0];[0,1,0,0];[0,0,-1,0];[0,0,1,0];... % [0,0,0,-1];[0,0,0,1]]; % B=[-1.5;2.5;-.25;1;-1500000;maxpress;-1;2]; % LB=[]; % UB=[]; Aeq=[]; beq=[]; LB=[1.5;.25;1500000]; UB=[2.5;1;maxpress];
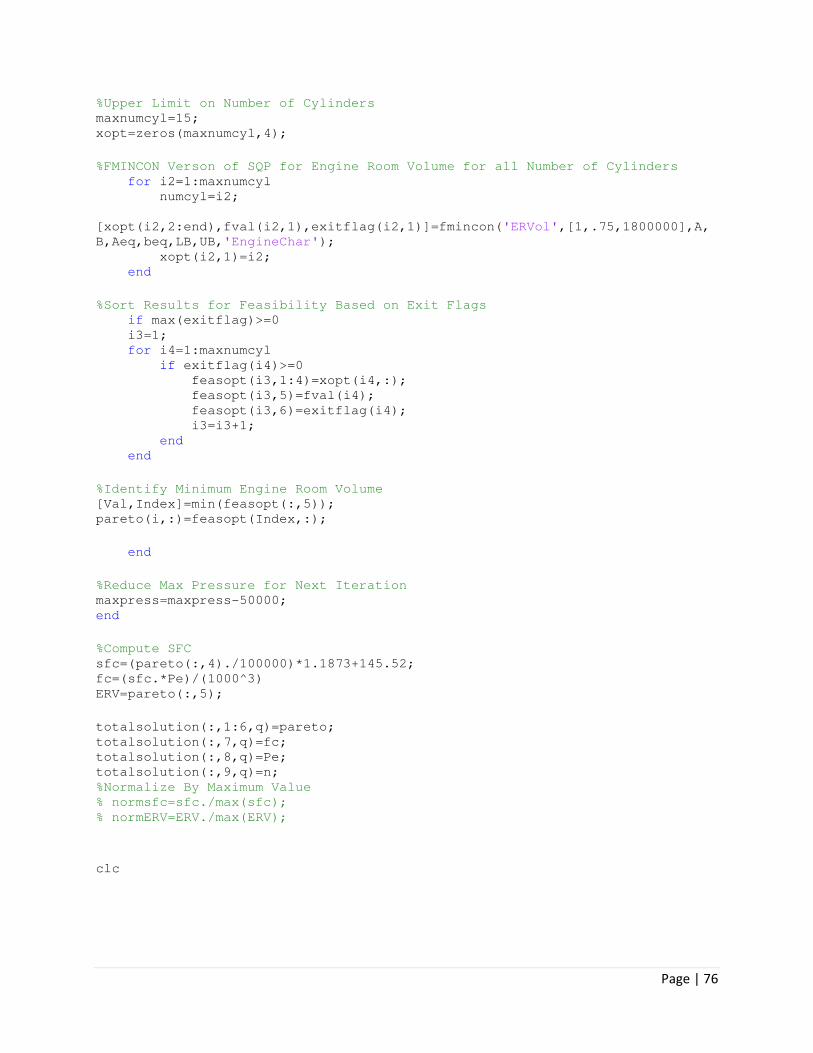
Page | 76
%Upper Limit on Number of Cylinders maxnumcyl=15; xopt=zeros(maxnumcyl,4);
%FMINCON Verson of SQP for Engine Room Volume for all Number of Cylinders for i2=1:maxnumcyl numcyl=i2;
[xopt(i2,2:end),fval(i2,1),exitflag(i2,1)]=fmincon('ERVol',[1,.75,1800000],A,
B,Aeq,beq,LB,UB,'EngineChar'); xopt(i2,1)=i2; end
%Sort Results for Feasibility Based on Exit Flags if max(exitflag)>=0 i3=1; for i4=1:maxnumcyl if exitflag(i4)>=0 feasopt(i3,1:4)=xopt(i4,:); feasopt(i3,5)=fval(i4); feasopt(i3,6)=exitflag(i4); i3=i3+1; end end
%Identify Minimum Engine Room Volume [Val,Index]=min(feasopt(:,5)); pareto(i,:)=feasopt(Index,:);
end
%Reduce Max Pressure for Next Iteration maxpress=maxpress-50000; end
%Compute SFC sfc=(pareto(:,4)./100000)*1.1873+145.52; fc=(sfc.*Pe)/(1000^3) ERV=pareto(:,5);
totalsolution(:,1:6,q)=pareto; totalsolution(:,7,q)=fc; totalsolution(:,8,q)=Pe; totalsolution(:,9,q)=n; %Normalize By Maximum Value % normsfc=sfc./max(sfc); % normERV=ERV./max(ERV);
clc

Page | 77
end %% clear minfc minERV front clc close all minfc=zeros(length(PeVector)*Psteps,numel(totalsolution(1,:,1))); tired=[0:Psteps:length(PeVector)*Psteps]; for i=1:length(PeVector) for q=1:Psteps minfc(tired(i)+q,:)=totalsolution(q,:,i); % minfc(tired(i)+q,2)=totalsolution(q,5,i); % minfc(tired(i)+q,3)=i; % minfc(tired(i)+q,4)=q; end end
u=1; for r=1:length(minfc) for s=1:length(minfc) if minfc(r,7)>minfc(s,7) && minfc(r,5)>=minfc(s,5) break else if s==length(minfc) front(u,:)=minfc(r,:); u=u+1; end end end end
%Utopian Solution for i=1:length(front) Utopian(i)=sqrt(((front(i,5)-min(front(:,5)))/(max(front(:,5))-
min(front(:,5))))^2+((front(i,7)-min(front(:,7)))/(max(front(:,7))-
min(front(:,7))))^2); end [UtopianVal,UtopianIndex]=min(Utopian);
for i=1:length(PeVector) %Plot figure (1) hold on plot(totalsolution(:,7,i),totalsolution(:,5,i),'b.') plot(front(:,7),front(:,5),'r.') plot(front(UtopianIndex,7),front(UtopianIndex,5),'g.','MarkerSize',25) plot(min(front(:,7)),min(front(:,5)),'k.','MarkerSize',25) xlabel('Fuel Consumption [MT/h]') ylabel('Engine Room Volume [m^3]') % title('Test Case Pe=28651 [kW] n=.85 [rps]') title('Increasing Draft - Decreasing rps')

Page | 78
% axis([0 10 0 12000]) legend('Feasible Solutions','Pareto Front','Selected Design','Utopian') end
figure(2) hold on plot(front(:,7),front(:,5),'b.') plot(front(UtopianIndex,7),front(UtopianIndex,5),'g.','MarkerSize',25) plot(min(front(:,7)),min(front(:,5)),'k.','MarkerSize',25) xlabel('Fuel Consumption [MT/h]') ylabel('Engine Room Volume [m^3]') title('Integrated System Pareto Front') % axis([3 7 0 12000]) legend('Pareto Front','Selected Design','Utopian')
%% xlswrite('C:\Documents and Settings\mcparker\Desktop\Project\Group
Report\Current Code\Engine Case Study.xlsx',front,'Sheet2');
2. Engine Objective Function
function [f]=ERVol(x) global numcyl f=(89.513*((numcyl*x(1)*pi*(x(2)/2)^2))^0.9787)*6.25; disp x for i=1:length(x) disp(x(i)) end
3. Engine Constraint Function
function[g,h]=EngineChar(x) global Pe numcyl n
g=[]; h=[Pe-numcyl*x(1)*(x(2)/2)^2*pi()*x(3)*n];
Related Documents











