Design of an Autonomous Rover: Team Tupperware Tank By: Ian Ebersole, Mike Dismuke, Senay Imum, and Alex Harrington

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Design of an Autonomous Rover: Team Tupperware Tank
By: Ian Ebersole, Mike Dismuke,
Senay Imum, and Alex Harrington

Team Tupperware Tank
• Left to Right: Alex Harrington, Senay Imum, Ian Ebersole, and Mike Dismuke
• Team Tupperware Tank formed in December of 2006 with the goal of building an autonomous rover for the CSGC Challenge

Purpose
• Research, design and build an autonomous rover that would be able to navigate rough terrain, locate an RF beacon, all the while simulating the processes NASA uses to develop robots, and intending to one day simulate landing the rover using an air balloon.

Design Specifications
• Our primary Design specifications included:
– Ability to move over terrain to the objective
– Ability to locate objective beacon
– Ability to avoid obstacles which could damage the rover
– Ability to withstand weather conditions
– Must weigh less than 1.5kg
– Must be built within a budget of $500

Preliminary research
• Key areas of preliminary research
– Locomotion systems
– Basic beacon location system
– Object detection
– Power sources
– Programming languages


Mechanical
• Our mechanical design in the end consisted of a tracked rover, built around an aluminum chassis with plastic being used to support electronic components.
Also associated with the mechanical system was the pair of motors, which were modified from standard Vexlabs motors.
Electronics
• Our electronics system, consisting mostly of sensors, included:
– An IR sensor
– A pair of switches arrayed as touch sensors
– The RF reciever
– Nickel-Cadmium batteries
Also associated with the electronics was the microprocessor and board

Programming
• Our programming logic was divided into several main categories:
• Motor operation and locomotion
• Object detection and avoidance
• Beacon detection
• Diagnostics and Initialization

Testing
• While at the end of our project our time remaining was tight, there were several tests which we put the rover through:
• A terrain test
• Object detection testing
• Beacon detection testing

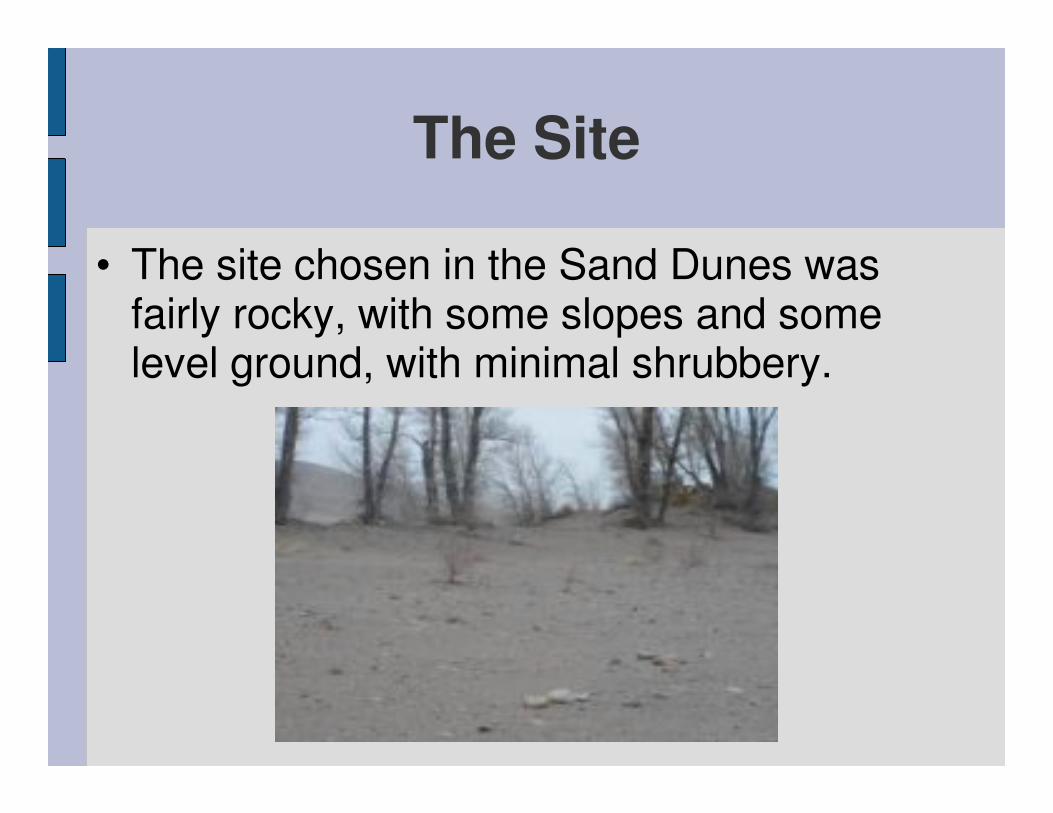
The Site
• The site chosen in the Sand Dunes was fairly rocky, with some slopes and some level ground, with minimal shrubbery.

The Event
• Two teams, Team Tupperware Tank (top) and Team Sandman (bottom), both from Colorado State University – Pueblo brought rovers to the event
• Approximately fifty people were spectators at the site and included college and high school students, parents and event coordinators


Results and Conclusions
� While the rover was able to overcome most of the obstacles on the course and head in the direction of the beacon, problems existed in the motor controller and programming that prevented the motors from moving the robot forward at a reasonable speed.
� These problems existed either because of complex programming issues or inadequate motor controller size. The rover project planned for next year will address these issues.
� In the end, the navigational and object detection systems worked flawlessly and the rover design (motors excepted) was superb.

Contributions and Acknowledgements
� A special thank you goes to Dr. Sauer and Dr. Sarper for leading and directing the project.
� Also, a thank you goes to Paul Wallace from the machine shop for helping machine parts for the rover.
� Finally, thanks to the Colorado Space Grant Consortium for creating the Robot Challenge in the first place.
Related Documents