DESIGN AND FABRICATION OF CURIOSITY ROVER Submitted by: T.Mehanathan (30308114024) N.C.Sathish Kumar (30308114043) R.Satish Kumar (30308114044) Sudharsan Akshay (30308114050) (Mechanical IV Year) Guided by: Mr. S. Prabhakaran Sr.Lecturer M.E.,

Design and fabrication of curiosity rover
Aug 16, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

DESIGN AND FABRICATION OF CURIOSITY ROVER
Submitted by:T.Mehanathan (30308114024)
N.C.Sathish Kumar (30308114043)R.Satish Kumar (30308114044)
Sudharsan Akshay (30308114050)(Mechanical IV Year)
Guided by:
Mr. S. Prabhakaran Sr.Lecturer M.E.,

ABSTRACT• The term, “Curiosity” stands for the desire to learn or know about something.
While “Rover” means wandering and searching for information. In short ‘Curiosity Rover’ is
a robotic device that is used for exploring terrains which are inaccessible to men. It
incorporates techniques from fields such as Robotics, Mechanical & Electronics Engineering.
• The term Robot is coined from a Czech word “Robota”, meaning slave-like labor
or simply, "meant to serve”.
"A reprogrammable, multifunctional manipulator designed to do required work through
various programmed motions ". -Robot Institute of America, 1979.
• In a nutshell, the “Curiosity Rover”, uses it’s wheeled locomotives to traverse and
gather information from landscapes which are inaccessible to humans. It uses a robotic arm for
pick and place operations and a set of sensors including Infrared sensor to get information
from the various entities present on the terrain .
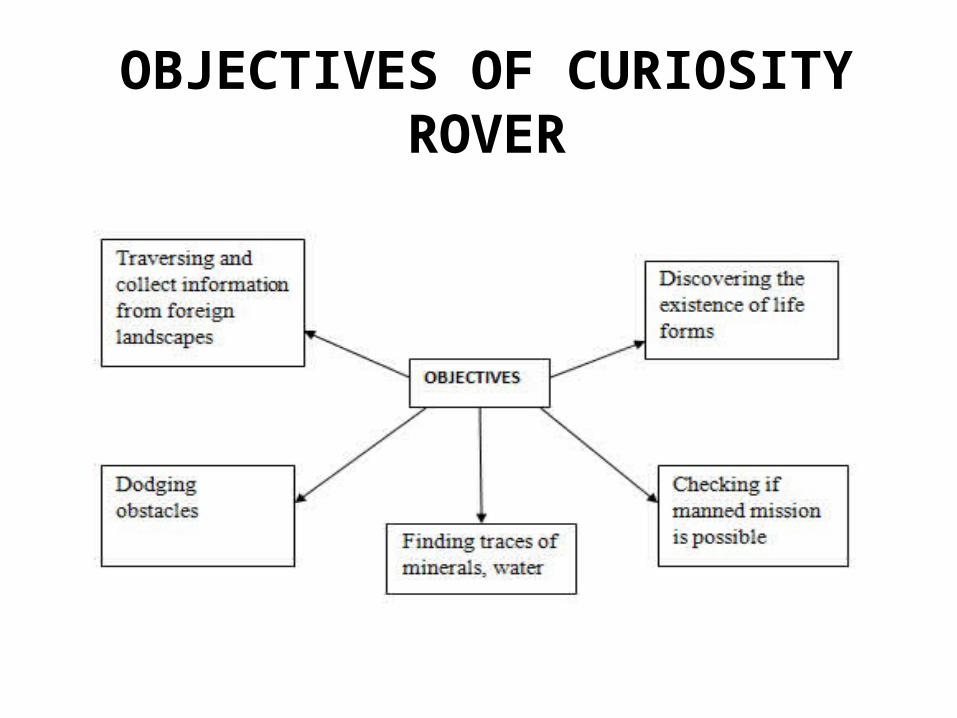
OBJECTIVES OF CURIOSITY ROVER

PROJECT STUDY
• We drew our inspiration from NASA’s “MER Spirit” i.e.“Mars Exploration Rover- Spirit” or simply “Spirit Rover” which landed on mars on March 22, 2010.
• The Mars Science Laboratory (MSL) a division of the California Institute of Technology in Oakland undertook the ‘Mars Exploration Rover’ project for NASA. The total cost of the mission extensions was $104 million.

MAIN COMPONENTS
DC MOTOR:
• A DC motor is an electric motor that runs on direct current (DC) electricity.
• We have used 12 volt DC motors of 30 rpm each (13 numbers) for the ‘Curiosity Rover’.

INFRARED EMITTER DETECTOR (IR SENSOR):
• The Infrared emitter detector circuit is very useful if you plan to make a line following robot, or a robot with basic object or obstacle detection.
• They can be used for obstacle detection, motion detection, transmitters, encoders, and color detection

INTEGRATED CIRCUIT:
• An integrated circuit (also referred to as IC, chip, or microchip) is a small electronic device made out of a semiconductor material to perform programmed operations.
• We have used IC 555 for timing control & AN6650 for motor control,

ALUMINUM:
• Aluminum is the third most abundant element in the Earth's crust. It makes up about 8% by weight of the earth's solid surface.
• Our project consists of around 70% of aluminum with traces of steel & Wood .

BATTERIES:
• A battery, is a device that produces electricity from a chemical reaction.
• We have used 12 volt non rechargeable Lithium batteries for the ‘Curiosity Rover’.

CONSTRUCTION
• Brains: Computers, chips, gates etc to process information.
• Base: A base or body for supporting all the other parts of the robot.
• Eyes and other "senses": Sensors that give information about environment.
• Arm: A way to extend its reach.• Legs with wheels: Parts for mobility.• Energy: Batteries and power.

WORKING
• Curiosity Rover traverses by the use of four wheeled locomotives driven by suitable 12 volt DC motors.
• The wheels can turn in any desired direction easily and the wheels can turn at 90 degrees.
• Three IR Sensors mounted on each leg making it a total of 12 to control direction of mobility.
• The rover uses a robotic arm assembly to pick, place and analyze components. For this purpose it uses 3 IR sensors for detection in 1 direction.
• The whole rover is powered by 12 volt Lithium disposable batteries.

PROCEDURE

ARM BASE WHEELED LEG
OUTPUT ROVER

INCORPORATED MECHANISMS
SLIDER CRANK MECHANISMThis mechanism is composed of three important parts:
• The crank which is the rotating disc,
• The slider which slides inside the tube and the connecting rod which joins the parts together.
• As the slider moves to the right the connecting rod pushes the wheel round for the first 180 degrees of wheel rotation. When the slider begins to move back into the tube, the connecting rod pulls the wheel round to complete the rotation.
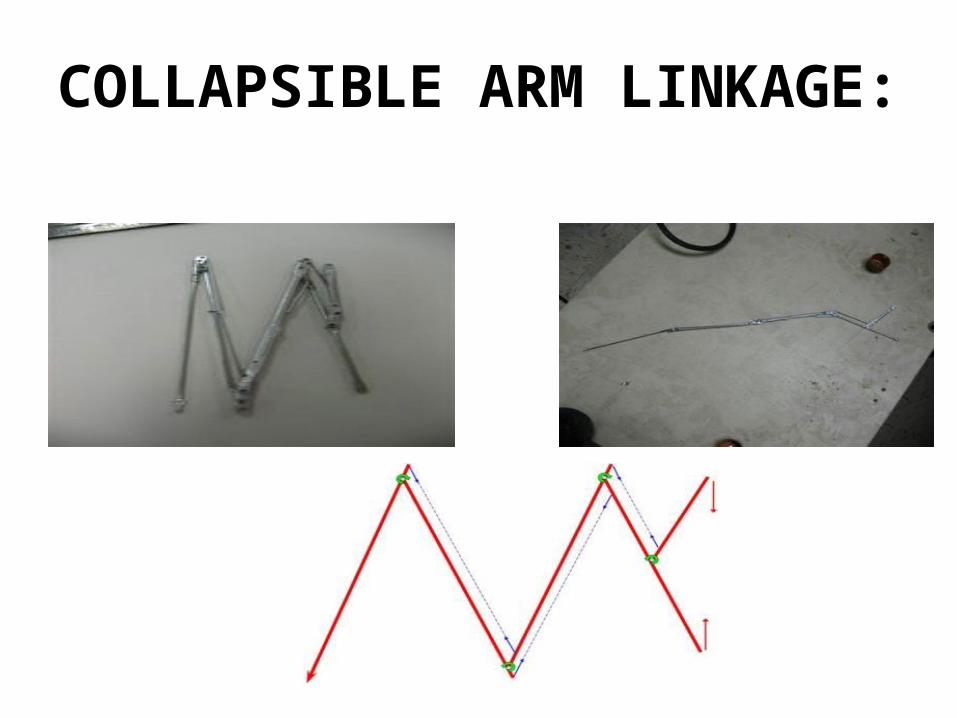
COLLAPSIBLE ARM LINKAGE:

ESTIMATED COST
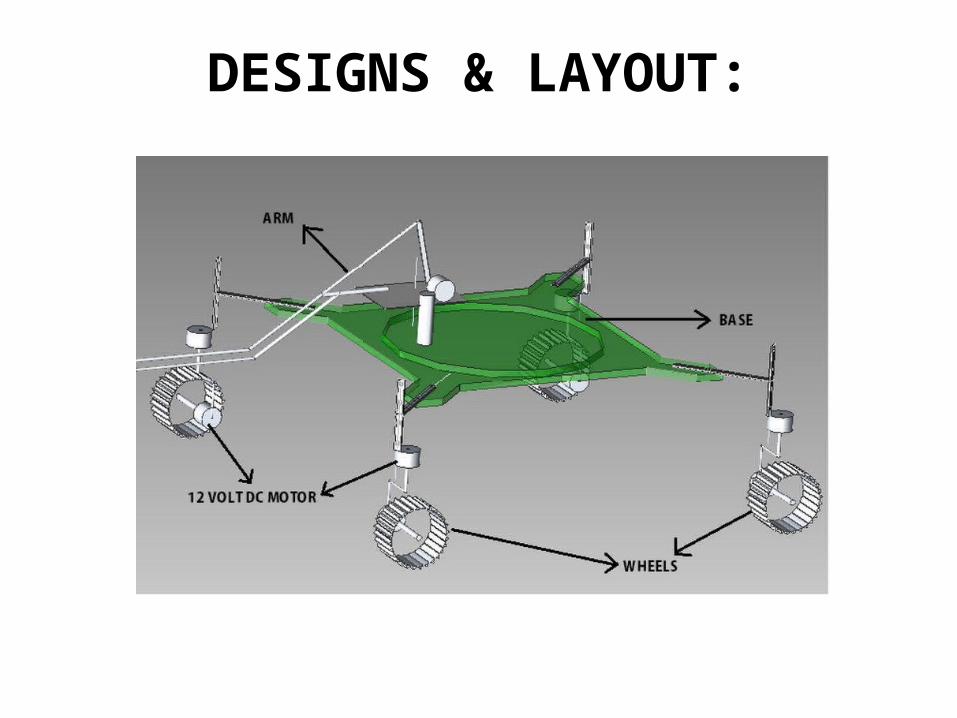
DESIGNS & LAYOUT:

LAYOUT

BASE DESIGN:

ARM DESIGN

WHEEL DESIGN

TIMING CONTROL CIRCUIT USING 555 IC
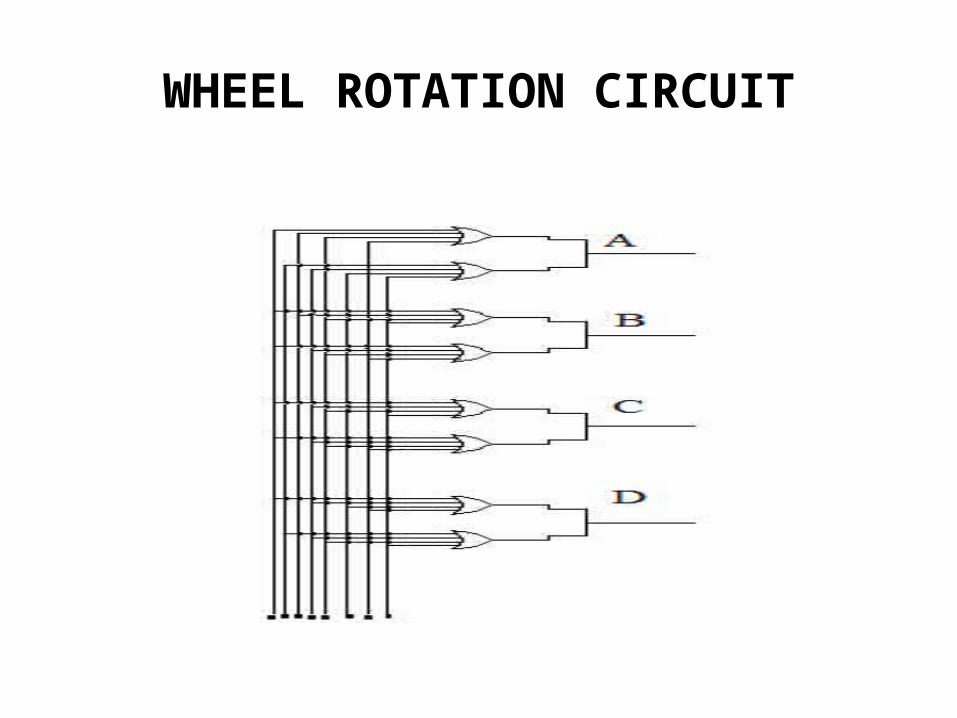
WHEEL ROTATION CIRCUIT

CALCULATION
GEAR CALCULATION:The basic equations used here are:P = (2/60000)* Π * N (Rpm) *T (Nm)P = 2/60000 * Π * 30 * 0.4905P = 1.59 x 10-3 KW
Where,P – Power in KWN – Speed in RpmT – Torque in N.mSmall gear RPM * small gear teeth / large gear teeth = large
gear RPM3000 RPM * 12 teeth / 40 teeth = 900 RPM


Curiosity rover details:Mass: 5 KgLength=700mmWidth=60.3mmHeight=50mmVolume=1789.6081mm3
Area = 4222.0222mm2 , Perimeter= 2l + 2wPerimeter = 259.9176 mm
Motor Requirements (per motor):Drive Motor Voltage=6 voltsExpected Current Draw= 1 amps# of Motors= 2 motorsTime % Motors Used= 75%

Electronics Requirements:Sensor Voltage = 5 voltsSensor Current Draw = .05 ampsMicrocontroller Voltage = 5 voltsMicrocontroller Current Draw = .03 ampsVoltage Regulator Dropout = 1 volt
Battery Setup (pack means in series):Voltage per Pack = 6 voltsmAh per Pack = 1200 mAhPacks in Parallel = 1pack
Calculated Results:Total Continuous Power Draw = 9.48 wattsMin Required Battery Voltage = 6 voltsIdle Motors Battery Life = 15 hrsMinimum Battery Life = 0.577 hrsTypical Battery Life = 0.759 hrs

CONCLUSION
The main aim of our project are to create a rover that is used for traversing terrains that are hazardous for manual intervention and to acquire information from there. For example, the possibility of water, minerals, life forms etc on the surface of an unmanned planet. Another objective is to pick up and place components essential for scientific research, by the use of robotic arm.

LITERATURE SURVEY• Hindawi Publishing Corporation Journal by Sir. Ahmed Hindawi (Cairo)• International Journal of Humanoid Robotics - World Scientific journals
by J.R Thomson, University of Missouri• http://mars.jpl.nasa.gov/msl/mission/rover/ (Jet Propulsion Laboratory),
California Institute of Technology.• Advanced Robotics published jointly with the Robotics Society of Japan. • http://www.societyofrobots.com/ (Website)• http://en.wikipedia.org/wiki/Robotics (Wikipedia)• http://twitter.com/MarsCuriosity (Official Twitter Fan Page) with 89,000
Followers.• Design of linkage mechanisms have been derived from Theory of Machines
by R.S.Khurmi. (S.Chand Publications)• "Novak Conversions - Gearing & Gearing Math for Jeeps." novak-
adapt.com. 2004. Ed. Novak. 21 February. 2004 http://www.novak-adapt.com/knowledge/gearing.htm.

THANK YOU
Related Documents











