Design and Analysis of Computer Experiments with Qualitative and Quantitative Factors Peter Z. G. Qian Assistant Professor Department of Statistics University of Wisconsin-Madison E-mail: [email protected] 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Design and Analysis of Computer Experiments with
Qualitative and Quantitative Factors
Peter Z. G. Qian
Assistant Professor
Department of Statistics
University of Wisconsin-Madison
E-mail: [email protected]
1

Collaborators
• Huaiqin Wu, Iowa State University.
• Jeff Wu at Georgia Tech.
• Qiang Zhou and Shiyu Zhou, University of Wisconsin-Madison.
2

Outline
• Modeling computer experiments with qualitative and quantitative factors.
• Sliced space-filling designs.
3

Computer Experiments
• Computer experiments: experiments using complex mathematical models,
implemented in large computer codes, to study real physicalsystems. E.g.,
finite element analysis and computational fluid dynamics.
• Can be expensive to run.
• Noise and bias don’t occur indeterministiccomputer experiments,
at least not in the traditional way.
• Principles of Replication, Blocking and Randomization areirrelevant.
• Correlated inputs. “Gambling on tomorrow,” Aug 16th 2007,Economist.
• High-dimensional inputs.
• Complex responses.
4

Motivating Example : Data Center Thermal Management
From http://blogs.business2.com/greenwombat/2007/08/sun- greens-the-.html

Data Center Computer Experiment
•Based on computational fluid dynamics (CFD).• Implemented in Flotherm.• Each run takes hours to complete.
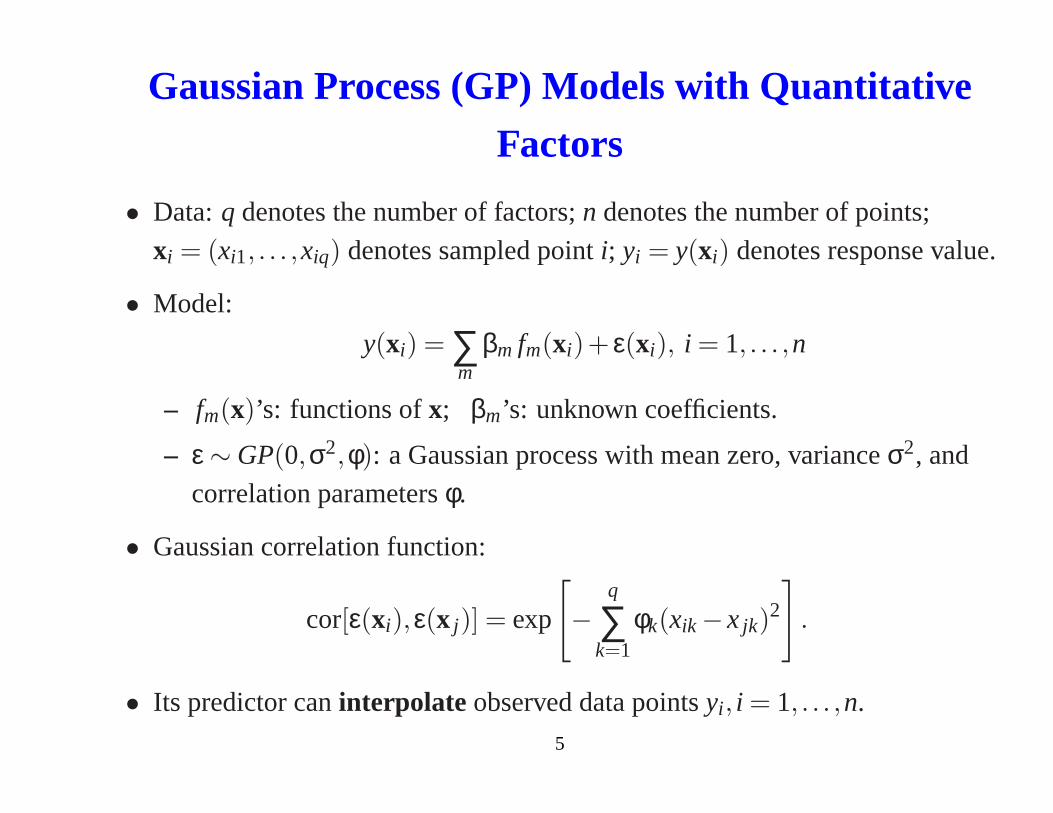
Gaussian Process (GP) Models with Quantitative
Factors
• Data:q denotes the number of factors;n denotes the number of points;
xi = (xi1, . . . ,xiq) denotes sampled pointi; yi = y(xi) denotes response value.
• Model:
y(xi) = ∑m
βm fm(xi)+ ε(xi), i = 1, . . . ,n
– fm(x)’s: functions ofx; βm’s: unknown coefficients.
– ε ∼ GP(0,σ2,φ): a Gaussian process with mean zero, varianceσ2, and
correlation parametersφ.
• Gaussian correlation function:
cor[ε(xi),ε(x j)] = exp
[−
q
∑k=1
φk(xik −x jk)2
].
• Its predictor caninterpolate observed data pointsyi , i = 1, . . . ,n.
5

Factors in the Data Center Example
• Quantitative factors include rack temperature rise, rack power, diffuser angle
and diffuser flow rate.
• Qualitative factors include diffuser type and cooling material type.
6

Two Naive Approaches for Modeling Quantitative and
Qualitative Factors
• Factors:w = (x,z); I quantitative factors:x = (x1, . . . ,xI ); J qualitative
factors:z = (z1, . . . ,zJ); response value:y(w).
• Independent Approach: fitting distinct GPs to data at different level
combinations ofz.
Drawback: too many parameters to estimate. An example with 7xi ’s and 3
4-levelzj ’s requires fitting 64= 43 GPs with 576 parameters.
• Collapsed Approach: fitting a GP forx.
Drawback: ignorance of valuablez.
7

A Better Solution: An Integrated Approach
• Idea: Build asingleGP model for bothx andz. Borrow strengths from all the
observations.
• Model:
y(w) = ∑m
βm fm(w)+ ε(w).
• How to specifyfm?
An easy problem: regression modeling involvingx andz (Wu and Hamada,
2000).
• How to specifyε (especially its correlation structure)?
A challenging problem: specification of correlation for a space with
continuous and discrete domains.
• Qian, P. Z. G., Wu, H. and Wu, C. F. J. (2008), “Gaussian ProcessModels for
Computer Experiments with Qualitative and Quantitative Factors,”
Technometrics, 50, 383–396.8

Construction of Correlation Functions for ε(w)
• Consider a simple case with one qualitative factorz1 with m1 levels 1, . . . ,m1.
Foru = 1, . . . ,m1, let εu(x) = ε(x,u).
• Idea: envision a mean-zero multivariate process(ε1(x), . . . ,εm1(x))′ = Aη(x).
• A: anm1×m1 matrix withunit row vectors.
• Elements ofη(x): m1 independent processes with a common varianceσ2.
• For two input valuesw1 = (x1,z11) andw2 = (x2,z12),
cor(ε(w1),ε(w2)) = τz11,z12Kφ(x1,x2)
– Kφ(x1,x2): correlation betweenx1 andx2.
– T1 = (τu1,u2)m1×m1 = AA t : anm1×m1 correlation matrix forz1 (i.e., a
positive definite matrix with unit diagonal elements).
9
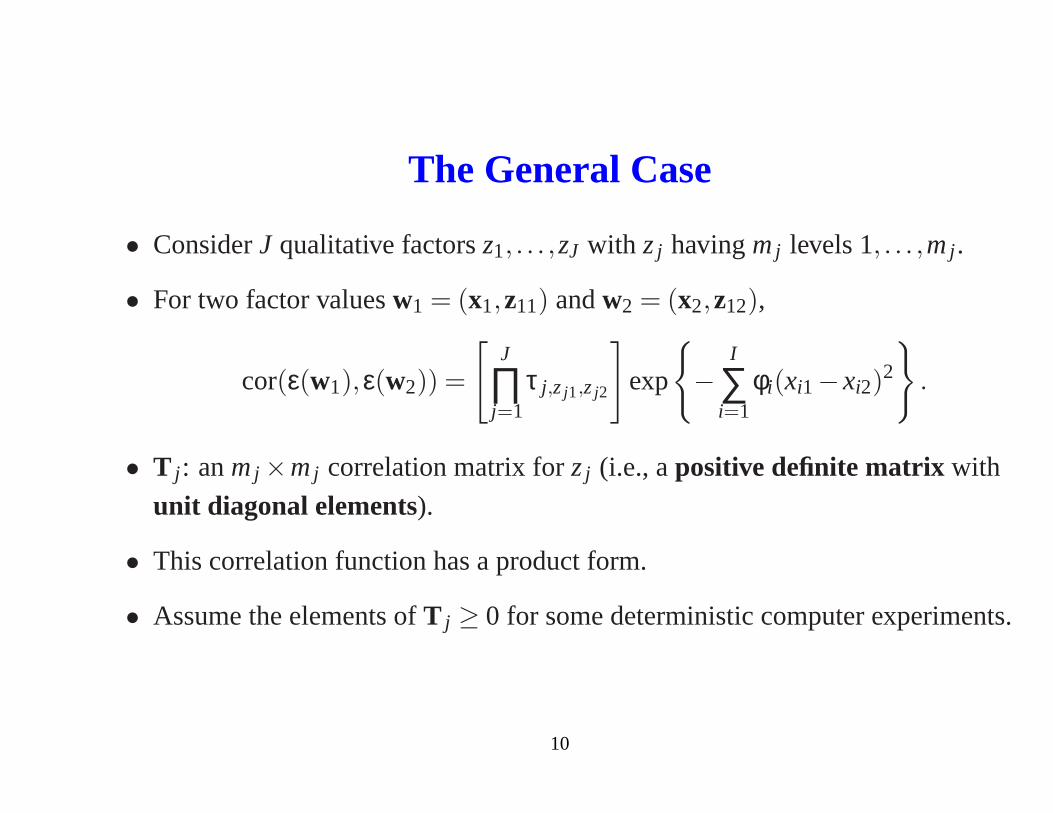
The General Case
• ConsiderJ qualitative factorsz1, . . . ,zJ with zj havingmj levels 1, . . . ,mj .
• For two factor valuesw1 = (x1,z11) andw2 = (x2,z12),
cor(ε(w1),ε(w2)) =
[J
∏j=1
τ j,zj1,zj2
]exp
{−
I
∑i=1
φi(xi1−xi2)2
}.
• T j : anmj ×mj correlation matrix forzj (i.e., apositive definite matrix with
unit diagonal elements).
• This correlation function has a product form.
• Assume the elements ofT j ≥ 0 for some deterministic computer experiments.
10

Some Restrictive Forms of Tj
Consider two input valuesw1 = (x1,z1) andw2 = (x2,z2) with responsesy(w1)
andy(w2). Recall thatτ j,zj1,zj2 is the correlation betweenzj1 andzj2.
1. Isotropy correlation function:τ j,zj1,zj2 = exp{−θ j I [zj1 6= zj2]}.
Forw1 andw2,
cor(ε(w1),ε(w2)) = exp
{−
I
∑i=1
φi(xi1−xi2)2−
J
∑j=1
θ j I [zj1 6= zj2]
}
Euclidean distance forxi ; 0-1 distance forzj .
2. Multiplicative correlation function:
τr,s = exp{−θr,s} = exp{−(θr +θs)I [r 6= s]}. (1)
3. Group correlation functions.
4. Correlation functions for ordinal qualitative factors.
11

Estimation
Use the maximum likelihood method.
• Model parameters:
– mean parametersβ = (β1, . . . ,βp).
– variance parameterσ2.
– correlation parametersφ = (φ1, . . . ,φI )t andT = {T1, . . . ,TJ}.
• The estimation iterates between
Regression fitting: Given φ andT, estimateβ andσ2.
Simple!
Correlation fitting: Givenβ andσ2, let U = (u1, . . . ,un) with
ui = [yi − βtf(wi)]/σ and then fit a GP with mean zero and variance one to
the transformed dataU.
12

Updates for Correlation Fitting
Iterate between the followingφ-step andT-step.
φ-step: GivenT, φ is obtained as follows:
φ = argminφ{[
trace(ER−1)]+ ln |R|
}
subject to φi ≥ 0, i = 1, . . . , I .
T-step: Given φ, T is obtained as follows:
T = argminT{[
trace(ER−1)]+ ln |R|
}
subject to T j ≻ 0, j = 1, . . . ,J,
diag(T j) = 1, j = 1, . . . ,J.
Use semi-definite programming techniques in theT-step.
13

Case Study 1: A Known Function
One qualitative factorz1 and one quantitative factorx1.
The response is defined as
y =
exp(1.4x1)cos(7πx1/2), if z1 = 1,
exp(3x1)cos(7πx1/2), if z1 = 2.
12 data points: six at each level ofz1.
14

Two Curves of Function Values
0.0 0.2 0.4 0.6 0.8 1.0
−10
−5
05
x
y
z1=1z1=2
15

Model Fitting
• Parameters in the GP models for theindependent approach
φ σ2 µ
z1 = 1 115.94 1.73 -0.002
z1 = 2 25.65 30.16 -2.09
• Parameters in the GP model for thecollapsed approach
φ σ2 µ
60 1778.62 -3.53
• Parameters in the GP model for theintegrated approach
φ θ1 σ2 µ
27.48 20.00 16.76 -1.07
16

Prediction Results
• Testing sample: forz1 = 1 and forz1 = 2, x1 takes 20 equally-spaced values
0.025,0.075, . . . ,0.975 in[0,1].
• Two methods for predictingy for the 40 testing runs: 1. integrated approach
and 2. independent approach. Compute RMSE
(root-mean-squared-error)=√
∑40j=1[y(w j)− y(w j)]2/40.
Integrated Independent
RMSE 1.03 1.21
• The integrated approach beats the independent approach by 15% reduction in
RMSE.
17

Case Study 2: A Data Center Computer Experiment
• Response: the temperature at one selected location of the system
– Five quantitative factors:x1–x5.
– Three qualitative factors:z1 with 2 levels,z2 with four levels, andz3 with
three levels.
• 67 observations; 24 level combinations ofz1–z3; less than 3 observations per
level combination.
• Assume the process mean is a linear additive function ofx andz.
18

Model Fitting
• The outer loop: iterate 20 times betweenregression fittingandcorrelation
fitting.
• The inner loop for the correlation fitting: iterate 20 times betweenφ-step and
T-step.
Parameter estimates:
• β =
(11.95,6.17,−2.77,3.05,−4.53,0.20,0.08,−0.95,−0.72,−1.73,2.66,1.27).
• Varianceσ2 = 2.85.
• φ = (7.57,1.08,1.07,7.71,3.36).
19

Estimated Correlation Matrices for z2 and z3
• T2 for z2:
1.00 0.84 0.78 0.50
0.84 1.00 0.82 0.54
0.78 0.82 1.00 0.71
0.50 0.54 0.71 1.00
Four eigenvalues> 0.
• T3 for z3:
1.00 0.62 0.83
0.62 1.00 0.61
0.83 0.61 1.00
Three eigenvalues> 0.
20

Main-Effect Functions for x1–x5 in ANOVADecomposition
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−3
−2
−1
0
1
2
3
x1
x2
x3
x4
x5
21

Two-Way Interaction Functions for x1–x5
00.5
1
00.5
1−0.5
0
0.5
x1
(a) Interaction function of x1 and x
2
x2
Fu
nct
ion
Va
lue
00.5
1
00.5
1−1
0
1
x1
(b) Interaction function of x1 and x
4
x4
Fu
nct
ion
Va
lue
00.5
1
00.5
1−0.1
0
0.1
x2
(c) Interaction function of x2 and x
3
x3
Fu
nct
ion
Va
lue
00.5
1
00.5
1−0.5
0
0.5
x4
(d) Interaction function of x4 and x
5
x5
Fu
nct
ion
Va
lue
22

Two-Way Interaction Functions betweenxi and zj
0 0.5 1−0.2
0
0.2
0.4
0.6
x1
Fu
nct
ion
Va
lue
Interaction of x1 and z1
0 0.5 1−0.1
−0.05
0
0.05
0.1
x2
Fu
nct
ion
Va
lue
Interaction of x2 and z2
0 0.5 1−0.1
−0.05
0
0.05
0.1
x3
Fu
nct
ion
Va
lue
Interaction of x3 and z2
0 0.5 1−0.1
0
0.1
0.2
0.3
x4
Fu
nct
ion
Va
lue
Interaction of x4 and z3
Blue solid lines: 1st levels ofz1–z3; red dotted lines: 2nd levels ofz1–z3; green dash-dot
lines: 3rd levels ofz2 andz3; cyan dashed lines: 4th level ofz2.
23

A Simple Approach to Emulation for Computer
Models With Qualitative and Quantitative Factors
• Based on hypersphere decomposition of correlation matrices.
• Avoid directly solving optimization problems with positive definite
constraints.
• Can model both negative and positive cross-correlations.
• Fast to compute.
Zhou, Q., Qian, P. Z. G. and Zhou, S (2010), “A Simple Approach to Emulation for
Computer Models With Qualitative and Quantitative Factors,” tentatively accepted
by Technometrics.24

Sliced Space-Filling Designs
Proposed in Qian and Wu (2009).
Construction:
1. For the quantitative factors, generate a space-filling design by using aspecialorthogonal array.
2. Use some algebraic methods to partition the design into groups corresponding
to different level combinations of the qualitative factorssuch that the points in
each of these groups achieve uniformity in low dimensions.
Qian, P. Z. G. and Wu, C. F. J. (2009), “Sliced Space-Filling Designs,”Biometrika
96, 945-956.
25

2-D Projections ofD
x1
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
0.0
0.2
0.4
0.6
0.8
1.0
x2
0.0 0.2 0.4 0.6 0.8 1.0 0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
x3
26

2-D Projections ofD11
x1
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
0.0
0.2
0.4
0.6
0.8
1.0
x2
0.0 0.2 0.4 0.6 0.8 1.0 0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
x3
27

2-D Projections ofD12
x1
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
0.0
0.2
0.4
0.6
0.8
1.0
x2
0.0 0.2 0.4 0.6 0.8 1.0 0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
x3
28

2-D Projections ofD21
x1
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
0.0
0.2
0.4
0.6
0.8
1.0
x2
0.0 0.2 0.4 0.6 0.8 1.0 0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
x3
29

2-D Projections ofD22
x1
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
0.0
0.2
0.4
0.6
0.8
1.0
x2
0.0 0.2 0.4 0.6 0.8 1.0 0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
x3
30

Thank you!
31
Related Documents











