República Bolivariana de Venezuela Universidad Nueva Esparta Facultad de Ingeniería Escuela de electrónica Desarrollo de un Prototipo de Sistema de Control de Aireado, Nivel de Agua, Movimiento de Nutrientes y Luz Artificial por Medio de un PLC y Control y Visualización del Tiempo Estimado para la Cosecha del Cultivo por Medio de un PIC, para Cultivos Hidropónicos de Raíz Flotante en Aplicaciones de Agricultura Familiar Urbana Trabajo de Grado presentado para optar al Título de Ingeniero Electrónico Tutor: Ing. Marín Washington M. C.I 18.602.258 Autores: Br. Alvarado Iliana C.I 18.809.474 Br. Solano Pablo C.I 17.144.002 Noviembre - 2011 Caracas – Venezuel Desarrollo de un Prototipo de Sistema de Control de Aireado, Nivel de Agua, Movimiento de Nutrientes y Luz Artificial por Medio de un PLC y Control y Visualización del Tiempo Estimado para la Cosecha del Cultivo por Medio de un PIC, para Cultivos Hidropónicos de Raíz Flotante en Aplicaciones de Agricultura Familiar Urbana is licensed under aCreative Commons Reconocimiento-NoComercial-SinObraDerivada 3.0 Unported License.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

República Bolivariana de Venezuela
Universidad Nueva Esparta
Facultad de Ingeniería
Escuela de electrónica
Desarrollo de un Prototipo de Sistema de Control de Aireado, Nivel de Agua, Movimiento de Nutrientes y Luz Artificial por Medio de un PLC y
Control y Visualización del Tiempo Estimado para la Cosecha del Cultivo por Medio de un PIC, para Cultivos Hidropónicos de Raíz
Flotante en Aplicaciones de Agricultura Familiar Urbana
Trabajo de Grado presentado para optar al Título de Ingeniero Electrónico
Tutor: Ing. Marín Washington M.
C.I 18.602.258
Autores:
Br. Alvarado Iliana
C.I 18.809.474
Br. Solano Pablo
C.I 17.144.002
Noviembre - 2011
Caracas – Venezuel
Desarrollo de un Prototipo de Sistema de Control de Aireado, Nivel de Agua, Movimiento de
Nutrientes y Luz Artificial por Medio de un PLC y Control y Visualización del Tiempo Estimado para la Cosecha del Cultivo por Medio de un PIC, para Cultivos Hidropónicos de Raíz Flotante en Aplicaciones de Agricultura Familiar Urbana is licensed under aCreative
Commons Reconocimiento-NoComercial-SinObraDerivada 3.0 Unported License.

ii
República Bolivariana de Venezuela
Universidad Nueva Esparta
Facultad de Ingeniería
Escuela de electrónica
Desarrollo de un Prototipo de Sistema de Control de Aireado, Nivel de Agua, Movimiento de Nutrientes y Luz Artificial por Medio de un PLC y
Control y Visualización del Tiempo Estimado para la Cosecha del Cultivo por Medio de un PIC, para Cultivos Hidropónicos de Raíz
Flotante en Aplicaciones de Agricultura Familiar Urbana
Jurado: ____________________
Nombre y Apellido
____________________
Cédula de Identidad
____________________
Firma
Jurado: ____________________
Nombre y Apellido
____________________
Cédula de Identidad
____________________
Firma
CALIFICACIÓN OBTENIDA, (en letra) _________ (en número) _________
Caracas, _____ de __________ del año _____.

iii
DEDICATORIAS
Quiero dedicarle este trabajo de grado, a mi madre, María Karelys
Hernández Moreno, por todo el esfuerzo y sacrificios que hizo, para criarme,
para hacer que yo me convirtiera en la mujer que soy. A mis abuelas
Vladimira Moreno y Agustina Mesia, por el apoyo incondicional, por ser mis
madres y padres, por los consejos de valor y lucha, para que nunca me
rindiera y alcanzar así mis metas, por enseñarme los principios de humildad,
solidaridad y honestidad. A mi Yeya amada, que aunque no está presente
físicamente se mantiene viva en mis recuerdos, vieja te dedico esta tesis
donde quiera que te encuentres, porque sé que de una manera u otra me
proteges y bendices, y siempre me has guiado por el camino correcto, te
amo. A mis hermanos que aún les queda un largo camino por recorrer.
Iliana Alvarado
En primer lugar quiero dedicar esta tesis de grado a mi mamá que ha
estado siempre presente en cada una de las etapas de mi formación, por ser
un ejemplo a seguir y por luchar junto a mí y mis hermanos en los momentos
difíciles que pasamos durante la realización de mi carrera, a mi abuela que
aunque en estos momentos no se encuentra entre nosotros aún sigue
presente en todo momento, en nuestro recuerdo y corazón. También al resto
de mi familia y amigos los cuales se hicieron presentes para aportar una
idea, comentario, ayuda o simplemente hacer compañía durante el desarrollo
de esta carrera universitaria.
Pablo Solano

iv
AGRADECIMIENTOS
Quiero agradecer a Jair Orea por el apoyo incondicional en esta etapa
de mi vida. A mi compañero de Tesis Pablo Solano, porque juntos, con
mucho sudor y esfuerzo logramos, no solo culminar esta tesis, sino también
una meta. A nuestro tutor Mauricio Marín por los aportes y consejos
brindados durante el desarrollo de este proyecto. A mi familia por estar
unidos en todo momento. Y a todas aquellas personas que aportaron un
grano de arena a lo largo de mi vida, que creyeron en mí, y que me ayudaron
a quitar las piedras del camino. Nuevamente a mi madre, porque todo lo que
soy y todo lo que he logrado se lo debo a ella, te amo mamá. Gracias a
Todos.
Iliana Alvarado
Agradezco a Dios, a mi familia por estar presentes en todo momento y
más aún en esta etapa importante de mi vida, por su apoyo, por los consejos
dados en momentos oportunos, permitiéndome así continuar con mi
desarrollo académico. En especial agradezco a mi mama y mis hermanos por
darme las fuerzas para seguir adelante con mis estudios y poder culminar mi
carrera. A los profesores por las enseñanzas que me han brindado y por
haberme dado la oportunidad de pertenecer a esta casa de estudios. A Iliana
Alvarado por ser una excelente compañera de clases, de tesis y amiga con la
cual he contado y que me apoyó y ayudó desde el comienzo de nuestra
carrera universitaria.
Pablo Solano

v
República Bolivariana de Venezuela
Universidad Nueva Esparta
Facultad de Ingeniería
Escuela de electrónica
Desarrollo de un Prototipo de Sistema de Control de Aireado, Nivel de Agua, Movimiento de Nutrientes y Luz Artificial por Medio de un PLC y
Control y Visualización del Tiempo Estimado para la Cosecha del Cultivo por Medio de un PIC, para Cultivos Hidropónicos de Raíz
Flotante en Aplicaciones de Agricultura Familiar Urbana
Trabajo de Grado presentado para optar al Título de Ingeniero Electrónico
Autores: Br. Iliana Alvarado
Br. Pablo Solano
Palabras Clave: Hidroponia, Raíz Flotante, Sistema de Control, Controladores, Sensores, Actuadores.
RESUMEN
El presente proyecto de grado se basa en el proceso de control de aireado, nivel de agua, movimiento de nutrientes y luz artificial, mediante un autómata programable, específicamente PLC, y el control y visualización del tiempo estimado para la cosecha del cultivo mediante un micro-controlador, específicamente un PIC, que manipularán ciertas variables que luego serán procesadas, analizadas y controladas. La necesidad del desarrollo de este prototipo de sistema de control, se constituye: en la automatización de cultivos hidropónicos, controlando el aireado del cultivo, el nivel de agua dentro del tubo PVC, el movimiento de los nutrientes y la incidencia de luz artificial; y a su vez controlando y visualizando el tiempo que requiere el cultivo para ser cosechado, y así lograr un avance en la agricultura familiar urbana, facilitando el proceso del cultivo de raíz flotante, y disminuyendo los costos requeridos para la adquisición de productos, así como también el tiempo de atención por parte del responsable del cultivo. Al implementar este prototipo se solventa en gran medida las dificultades técnicas en el progreso de cultivos de raíz flotante, por medio de la integración: de sensores y actuadores para cubrir las necesidades del cultivo, interconectados a una unidad de procesos PLC, que previa programación, controlará

vi
las variables necesarias, como el aireado, el nivel de agua, el movimiento de nutrientes y la incidencia de luz artificial, así como también se empleará un micro-controlador PIC para visualizar el tiempo requerido para cada fase del cultivo; y así obtener un control del proceso con una mayor precisión. Lográndose, en última instancia, identificar el funcionamiento y los distintos procesos que integran el sistema, mediante el estudio y la observación de los diferentes métodos existentes en cultivos hidropónicos de raíz flotante, lo cual facilitó la selección de las variables a controlar y la ubicación de los sensores y actuadores que se necesitan aplicar alrededor de los tubos PVC, a consecuencia del conocimiento de las partes involucradas tanto en el cultivo como fuera de él.

vii
República Bolivariana de Venezuela
Universidad Nueva Esparta
Facultad de Ingeniería
Escuela de electrónica
Development of an Airing Control System Prototype, Water Level, Movement of Nutrients and Artificial Light through a PLC and a
Visualization Control of Estimated Time for the Harvest of Crops through a PIC, for hydroponics Crops of Floating Root in Applications
of Urban Familiar Agriculture.
Grade Work presented to obtain the Title of Electronic Engineering
Authors: Br. Iliana Alvarado
Br. Pablo Solano
Keywords: Hydroponics, Root Floating, Control System, Controllers, Sensors, Actuators.
SUMMARY OF WORK
The present project of degree is in the process of control of airing, water level, movement of nutrients and artificial light through a programmable robot, specifically PLC, and the control and visualization of the estimated time for the harvest of the crops through a micro-controller, specifically a PIC, that will manipulate certain variables that will be processed, analyzed controlled later on. The necessity of the development of this prototype of control system, constitutes in the automation of hydroponic crops, controlling the airing of the crops, the water level within PVC tube, the movement of the nutrients and the incidence of artificial light; and as well controlling and visualizing the time that required the crops to be harvested, and like this achieve an advance in the urban familiar agriculture facilitating the process of crops of floating root, and reducing the required costs for the acquisition of products, as well as the time of attention by the crops owner part. When implementing this prototype we resolve the technical difficulties to a great level in the progress of crops by floating root, through the integration: Of sensors and actuators to cover the needs with the crop, interconnected in a process unit PLC, that previous programming, will control the necessary variables, like control of the process the airing at the water level, the movement of nutrients and incidence of artificial light, as well as a micro-controller PIC will be implement in order to visualize the time required for each phase of the crop; and thus to obtain a process

viii
control with a greater precision. Achieving, in last instance, to identify the operation and the different processes that integrate the system, through of the study and the observation of different existing methods in hydroponic crops of floating root, which facilitated the selection of the variables to control and the location of the sensors and actuators that are needed to apply around PVC tubes, consequence of the knowledge of the involved parts as much in the crop as outside it.

ix
ÍNDICE PRINCIPAL
DEDICATORIAS ............................................................................................. iii
AGRADECIMIENTOS ..................................................................................... iv
RESUMEN ...................................................................................................... v
SUMMARY OF WORK .................................................................................. vii
INTRODUCCIÓN ............................................................................................ 1
CAPÍTULO I .................................................................................................... 4
EL PROBLEMA DE INVESTIGACIÓN ............................................................ 4
1.1 PLANTEAMIENTO DEL PROBLEMA .................................................... 4
1.2 INTERROGANTES DE LA INVESTIGACIÓN ....................................... 5
1.2.1 Interrogante Principal ...................................................................... 5
1.2.2 Interrogantes Secundarias .............................................................. 6
1.3 OBJETIVOS DE LA INVESTIGACIÓN .................................................. 7
1.3.1 Objetivo General ............................................................................. 7
1.3.2 Objetivos Específicos ...................................................................... 7
1.4 JUSTIFICACIÓN DE LA INVESTIGACIÓN ........................................... 8
1.5 DELIMITACIONES DE LA INVESTIGACIÓN ...................................... 10
1.5.1 Delimitación Temática ................................................................... 10
1.5.2 Delimitación Geográfica ................................................................ 11
1.5.3 Delimitación Temporal ................................................................... 11
1.5.4 Delimitación Técnica ..................................................................... 11
1.6 LIMITACIONES DE LA INVESTIGACIÓN ........................................... 12
CAPÍTULO II ................................................................................................. 14
MARCO TEÓRICO ....................................................................................... 14
2.1 ANTECEDENTES ................................................................................ 14
2.2 BASES TEÓRICAS ............................................................................. 19
2.2.1 Hidroponia ..................................................................................... 19

x
2.2.1.1 El Pasado de la Hidroponia ................................................... 21
2.2.1.2 La Hidroponía en la Actualidad.............................................. 26
2.2.1.3 Sistemas de Cultivo Hidropónico ........................................... 27
2.2.1.4 Localización e Instalación de una Huerta Hidropónica .......... 39
2.2.1.5 Sustratos Sólidos ................................................................... 39
2.2.1.6 Solución Nutritiva ................................................................... 53
2.2.2 Sistemas de Control ................................................................. 56
2.2.2.1 Estrategias de Control ........................................................... 57
2.2.2.2 Sensores ............................................................................... 58
2.2.2.3 Controladores ........................................................................ 65
2.2.2.4 Actuadores ............................................................................ 81
2.3 CUADRO DE OPERACIONALIZACIÓN DE VARIABLES ................... 87
2.4 DEFINICIÓN DE TÉRMINOS BÁSICOS ............................................. 92
CAPÍTULO III ................................................................................................ 96
MARCO METODOLÓGICO .......................................................................... 96
3.1 TIPO DE INVESTIGACIÓN ................................................................. 96
3.2 DISEÑO DE INVESTIGACIÓN ............................................................ 98
3.3 POBLACIÓN Y MUESTRA .................................................................. 99
3.4 TÉCNICAS E INSTRUMENTOS DE RECOLECCIÓN DE DATOS .. 100
3.5 PROCESAMIENTO Y ANÁLISIS DE INFORMACIÓN ...................... 101
CAPÍTULO IV .............................................................................................. 114
SISTEMA PROPUESTO ............................................................................. 114
4.1 DEFINIR EL MÉTODO DE CULTIVO DE RAÍZ FLOTANTE QUE SERÁ
UTILIZADO PARA LA APLICACIÓN DEL PROTOTIPO A DESARROLLAR.
................................................................................................................ 114
4.2 IDENTIFICAR EN FUNCIÓN DEL MÉTODO SELECCIONADO, LAS
PLANTAS QUE SERÁN CULTIVADAS ................................................... 118
4.2.1 Lechuga Romana ........................................................................ 119
4.2.2 Acelga ......................................................................................... 120
4.2.3 Cilantro ........................................................................................ 120

xi
4.3 DETERMINAR EL TIEMPO DE EJECUCIÓN DE LOS PROCESOS
QUE SE DESEAN CONTROLAR ............................................................ 121
4.3.1 Aireación de la Solución Nutritiva ................................................ 121
4.3.2 Movimiento de Nutrientes ............................................................ 122
4.3.3 Incidencia de la Luz Artificial ....................................................... 122
4.3.4 Control de Tiempo de Cosecha ................................................... 123
4.4 ESTABLECER LOS SENSORES Y ACTUADORES ADECUADOS
PARA CUBRIR LAS VARIABLES DEL MÉTODO DE RAÍZ FLOTANTE
QUE SE DESEAN CONTROLAR EN EL DESARROLLO DE ESTE
PROTOTIPO ........................................................................................... 123
4.4.1 Switch de Seguridad.................................................................... 123
4.4.2 Pulsadores .................................................................................. 124
4.4.3 Teclado Numérico ....................................................................... 125
4.4.4 Sensores de Nivel ....................................................................... 125
4.4.5 Indicadores .................................................................................. 127
4.5 SELECCIONAR EL MODELO DE PLC ADECUADO, PARA
CONTROLAR LAS VARIABLES DEL SISTEMA DE CONTROL
PROPUESTO .......................................................................................... 133
4.5.1 Software de Programación .......................................................... 137
4.6 ELEGIR EL MODELO DE MICROCONTROLADOR PIC ADECUADO,
PARA CONTROLAR Y VISUALIZAR EL TIEMPO QUE REQUIERE EL
CULTIVO PARA SER COSECHADO ...................................................... 141
4.7 DISEÑAR Y DESARROLLAR EL PROGRAMA DE CONTROL DE
AIREADO, NIVEL DE AGUA, MOVIMIENTO DE NUTRIENTES Y LUZ
ARTIFICIAL, BASADO EN LENGUAJE ESCALERA PARA EL PLC
ELEGIDO ................................................................................................. 142
4.8 DISEÑAR Y DESARROLLAR EL PROGRAMA DE CONTROL Y
VISUALIZACIÓN DEL TIEMPO ESTIMADO PARA LA COSECHA DEL
CULTIVO, PARA EL MICROCONTROLADOR PIC ELEGIDO ............... 147
4.8.1 Programa en Assembler .............................................................. 147
4.8.1 Ejecución del Proceso con PLC .................................................. 151
4.9 EVALUAR LA FUNCIONALIDAD DEL SISTEMA EJECUTADO ....... 155
CONCLUSIONES ....................................................................................... 156

xii
RECOMENDACIONES ............................................................................... 158
REFERENCIAS BIBLIOGRÁFICAS ............................................................ 159
REFERENCIAS ELECTRÓNICAS .............................................................. 160
Anexos ........................................................................................................ 167
ANEXOS A. CARTAS Y CONSTANCIAS ..... ¡Error! Marcador no definido.
ANEXOS B. INSTRUMENTOS DE RECOLECIÓN DE DATOS ......... ¡Error!
Marcador no definido.
ANEXOS C. COTIZACIONES ...................... ¡Error! Marcador no definido.
ANEXOS D. FACTURAS .............................. ¡Error! Marcador no definido.

xiii
ÍNDICE SECUNDARIO
ÍNDICE DE FIGURAS
Figura n° 1 Cultivo de Berros y Lechugas Inocuas, en Cajas Plásticas
Elevadas del Suelo. ...................................................................................... 15
Figura n° 2 Tomates Hidropónicos ................................................................ 16
Figura n° 3 Modelo de Recepción y Envío de Mensajes SMS ...................... 18
Figura n° 4 Logo de la FAO .......................................................................... 19
Figura n° 5 Ubicación de Cachemira ............................................................ 21
Figura n° 6 Isla La Ascensión ....................................................................... 25
Figura n° 7 Base Aérea de la Isla La Ascensión ........................................... 25
Figura n° 8 Bandejas de Sustrato ................................................................. 29
Figura n° 9 Germinación de la Lechuga Simpson a 10 Días de la Siembra . 30
Figura n° 10 Trasplante para la Siembra de Raíz Flotante de la Lechuga
Simpson ........................................................................................................ 30
Figura n° 11 Lechugas a 14 Días Después del Trasplante ........................... 30
Figura n° 12 Cosecha de Lechuga Simpson en Sistema de Raíz Flotante ... 31
Figura n° 13 Bancales para Sistema de Raíz Flotante ................................. 31
Figura n° 14 Sistema NFT ............................................................................ 32
Figura n° 15 Cultivo Hidropónico con Sistema NFT ...................................... 33
Figura n° 16 Banca de Floración Escalonada ............................................... 33
Figura n° 17 Siembra en Sustrato Sólido ...................................................... 34
Figura n° 18 Siembra en Almacigos .............................................................. 35
Figura n° 19 Cultivo en Sustrato con Bombeo Continuo de Nutrientes ......... 36
Figura n° 20 Sistema de Riego por Goteo .................................................... 36
Figura n° 21 Mangas Antes de la Producción Hidropónica ........................... 37
Figura n° 22 Esquema de Preparación de una Manga Vertical para
Hidroponia .................................................................................................... 38
Figura n° 23 Mangas Verticales Regadas por Bombeo ................................ 38
Figura n° 24 Volúmenes Relativos de Material Sólido, Líquido y Gaseoso en
un Buen Sustrato .......................................................................................... 41
Figura n° 25 Estructura Granular .................................................................. 43
Figura n° 26 Estructura Fibrilar ..................................................................... 44
Figura n° 27 Algunos Tipos de Gravas ......................................................... 50

xiv
Figura n° 28 Tipos de Turbas ....................................................................... 51
Figura n° 29 Esquema General de un Sistema de Control ........................... 56
Figura n° 30 Control Lazo Cerrado vs Control Lazo Abierto ......................... 58
Figura n° 31 Sensor Analógico ..................................................................... 60
Figura n° 32 Fotorresistencia o LDR ............................................................. 60
Figura n° 33 Potenciómetro .......................................................................... 61
Figura n° 34 Sensor Digital ........................................................................... 62
Figura n° 35 Contacto Normalmente Abierto y Contacto Normalmente
Cerrado ......................................................................................................... 63
Figura n° 36 Pulsadores ............................................................................... 63
Figura n° 37 Interruptores ............................................................................. 63
Figura n° 38 Microswitch ............................................................................... 64
Figura n° 39 PLC de Estructura Compacta ................................................... 68
Figura n° 40 Áreas de la Memoria Interna .................................................... 70
Figura n° 41 Estructura y Memorias del PLC ................................................ 70
Figura n° 42 Contactos en Lenguaje Escalera .............................................. 71
Figura n° 43 Bobinas en Lenguaje Escalera ................................................. 72
Figura n° 44 Logo Siemens .......................................................................... 73
Figura n° 45 Logo Allen Bradley ................................................................... 74
Figura n° 46 Arquitectura Harvard ................................................................ 76
Figura n° 47 Organización de la Memoria de Datos ..................................... 77
Figura n° 48 Organización de Memoria de Programa ................................... 77
Figura n° 49 Resumen del Conjunto de Instrucciones .................................. 79
Figura n° 50 Interior de un Cilindro Hidráulico .............................................. 81
Figura n° 51 Interior de un Motor Oscilante .................................................. 82
Figura n° 52 Cremallera ................................................................................ 82
Figura n° 53 Rotativo de Paletas .................................................................. 82
Figura n° 54 Motor Eléctrico ......................................................................... 84
Figura n° 55 Partes Internas de un Motor Eléctrico ...................................... 84
Figura n° 56 Bombillas Fluorescentes .......................................................... 87
Figura n° 57 Bombillas Incandescentes ........................................................ 87
Figura n° 58 Tubos PVC Perforados ........................................................... 115
Figura n° 59 Vaso Perforado ...................................................................... 116
Figura n° 60 3/4 de Arcilla Expandida ......................................................... 116
Figura n° 61 1/4 de Sustrato Combinado .................................................... 116
Figura n° 62 Contenedor de Madera HDF .................................................. 117
Figura n° 63 Cultivo Hidropónico de Berro .................................................. 119
Figura n° 64 Contenedores de Berros Hidropónicos ................................... 119
Figura n° 65 Interruptor Magnetotérmico .................................................... 124

xv
Figura n° 66 Pulsador Verde de Encendido ................................................ 125
Figura n° 67 Pulsador de Parada de Emergencia ....................................... 125
Figura n° 68 Sensor de Nivel Alto ............................................................... 126
Figura n° 69 Sensor de Nivel Bajo .............................................................. 127
Figura n° 70 Tablero de Indicadores ........................................................... 127
Figura n° 71 Indicador de Encendido NHS 001 .......................................... 128
Figura n° 72 Indicador de Parada de Emergencia NHS 002 ....................... 129
Figura n° 73 Indicador de Nivel Bajo del Tanque NLSL 001 ....................... 129
Figura n° 74 Indicadores de Accionamiento de las Bombas de Agua......... 130
Figura n° 75 Bomba de Aire ........................................................................ 131
Figura n° 76 Bombas de Agua .................................................................... 131
Figura n° 77 Lámparas ............................................................................... 132
Figura n° 78 Banco de PLC ........................................................................ 134
Figura n° 79 Especificaciones Técnicas del LOGO! 12/24RC y los Módulos
de Expansión DM8 12/24R ......................................................................... 135
Figura n° 80 Especificaciones Técnicas del LOGO! 12/24RC y los Módulos
de Expansión DM8 12/24R...Continuación ................................................. 136
Figura n° 81 LOGO!Soft Comfort V6.1 ........................................................ 138
Figura n° 82 Entorno Gráfico ...................................................................... 138
Figura n° 83 Constantes en Esquema de Contactos .................................. 139
Figura n° 84 Funciones Especiales en Esquema de Contactos ................. 139
Figura n° 85 Constantes en Diagrama de Funciones ................................. 140
Figura n° 86 Funciones Básicas en Diagrama de Funciones ..................... 140
Figura n° 87 Funciones Especiales en Diagrama de Funciones ................. 140
Figura n° 88 Especificaciones Técnicas del Microcontrolador PIC ............. 142
Figura n° 89 Puesta en Marcha... Programa ............................................... 143
Figura n° 90 Parada de Emergencia por Nivel Bajo... Programa ................ 144
Figura n° 91 Accionamiento de las Bombas... Programa ............................ 145
Figura n° 92 Activación de la Bomba de aire... Programa .......................... 145
Figura n° 93 Activación de Lámparas... Programa ..................................... 146
ÍNDICE DE TABLAS
Tabla n° 1 Capacidad de Retención de Agua .............................................. 42
Tabla n° 2 Densidad de Algunos Sustratos ................................................. 43
Tabla n° 3 Granulometría ............................................................................. 44

xvi
Tabla n° 4 Resumen sobre las Principales Propiedades Físicas de los
Sustratos ....................................................................................................... 45
Tabla n° 5 Propiedades Físico-Químicas de las Turbas .............................. 51
Tabla n° 6 Mezclas más Usadas .................................................................. 52
Tabla n° 7 Soluciones Modificadas de Hoagland ......................................... 55
Tabla n° 8 Operacionalización de Variables ................................................ 88
Tabla n° 9 Métodos de Cultivo Hidropónico ............................................... 103
Tabla n° 10 Método Practicado .................................................................. 104
Tabla n° 11 Tipos de Contenedores .......................................................... 105
Tabla n° 12 Ubicación de los Contenedores .............................................. 106
Tabla n° 13 Tipos de Plantas Cultivadas ................................................... 107
Tabla n° 14 Procesos a Controlar .............................................................. 109
Tabla n° 15 Tiempo de Gestación.............................................................. 110
Tabla n° 16 Tamaño de las Plantas ........................................................... 111
Tabla n° 17 Luz para las Plantas ............................................................... 112
Tabla n° 18 Composición del Sustrato Combinado.................................... 117
Tabla n° 19 Tabla de Consumo ................................................................. 136
Tabla n° 20 Entradas y Salidas .................................................................. 151
ÍNDICE DE DIAGRAMAS
Diagrama n° 1 Clasificación de los Controladores Lógicos .......................... 65
Diagrama n° 2 Funcionamiento de un PLC .................................................. 67
Diagrama n° 3 Clasificación de los Indicadores ............................................ 86
Diagrama n° 4 Diagrama en Bloques del Sistema Propuesto para PLC.... 150
Diagrama n° 5 Diagrama en Bloques para Sistema Propuesto para PIC .. 151
Diagrama n° 6 Diagrama Eléctrico de PLC ................................................ 152
Diagrama n° 7 Diagrama Esquemático de la Conexión en PLC ................ 153
Diagrama n° 8 Diagrama Eléctrico del PIC ................................................ 154
Diagrama n° 9 Diagrama Esquemático de PIC .......................................... 155
ÍNDICE DE GRÁFICOS
Gráfico nº 1 Métodos de Cultivo Hidropónico ............................................ 103

xvii
Gráfico nº 2 Método Practicado ................................................................. 104
Gráfico nº 3 Tipos de Contenedores .......................................................... 105
Gráfico nº 4 Ubicación de los Contenedores ............................................. 106
Gráfico nº 5 Tipos de Plantas Cultivadas ................................................... 108
Gráfico nº 6 Procesos a Controlar ............................................................. 109
Gráfico nº 7 Tiempo de Gestación ............................................................. 110
Gráfico nº 8 Tamaño de las Plantas .......................................................... 111
Gráfico nº 9 Luz para las Plantas ............................................................... 113
ÍNDICE DE ANEXOS
Anexos D. 1 Factura n° 101308 Servieleca ............................................... 178
Anexos D. 2 Factura n° 101171 Servieleca ............................................... 179
Anexos D. 3 Factura n° 101303 Servieleca ............................................... 180
Anexos D. 4 Factura n° 101009 Servieleca ............................................... 181
Anexos D. 5 Factura n° 2131 ..................................................................... 182

1
INTRODUCCIÓN
La hidroponia es un método empleado en la agricultura, para cultivar
plantas sin la utilización de suelo agrícola, sino más bien con una solución de
minerales compuesta por los elementos químicos necesarios para el
desarrollo de la planta.
En 1928, el profesor William Frederick Gericke de la Universidad de Berkeley, en California fue el primero en sugerir que los cultivos en solución se utilizasen para la producción vegetal agrícola. Gericke causó sensación al hacer crecer tomates y otras plantas que alcanzaron tamaños notables (mayores que las cultivadas en tierra) en soluciones minerales. Por analogía con el término geopónica (que significa agricultura en griego antiguo) llamó a esta nueva ciencia hidroponia en 1937, aunque él afirma que el término fue sugerido por el Dr. W.A Setchell, de la Universidad de California, de las palabras hydros (regar) y ponos (trabajo). (Creative Commons, 2011, p.1)
El cultivo sin tierra es un gran avance agrícola, ya permite producir
hortalizas frescas y sanas en pequeños espacios, aprovechando elementos
que son desechados. La urbanización de diferentes zonas asociada a los
problemas de pobreza, está vinculada con las limitantes que afectan el
desarrollo de los países. Según El Manual FAO; “El desarrollo y la
apropiación de tecnologías es parte de uno de los mandatos recibidos por la
ONU para la agricultura y alimentación… En este sentido, la hidroponia está
comenzando a consolidarse como una opción imaginativa en lucha contra la
pobreza.” (2003, p.25).

2
De igual forma la tecnología también se ha desarrollado de manera
muy significativa en todos los ámbitos hasta lograr los avances actuales,
mejorando la existencia humana. Una muestra de ello es la implementación
de los sistemas de control en diferentes lugares, como por ejemplo, en las
grandes industrias, para el control de etiquetado de productos, en los
hogares, oficinas y centros comerciales, para el control de seguridad, de
iluminación y de acceso. A esto no se escapa la agricultura, con el control de
riego.
Los sistemas de control se encargan de manipular ciertas variables de
entrada, con la finalidad de conseguir otras variables de salida para obtener
en respuesta un determinado proceso. En el caso de este proyecto de
investigación, se controlará por medio de sensores y actuadores
interconectados a un autómata programable PLC y a un microcontrolador
PIC, las variables que afectan el proceso de cultivo hidropónico de raíz
flotante, como lo son el aireado, el nivel de agua, el movimiento de
nutrientes, la incidencia de luz artificial y la visualización de tiempo de cada
cultivo.
Se han creado diferentes tecnologías para la mejora de la práctica
agrícola, como por ejemplo el Rocío Inteligente para ajustar la cantidad de
fertilizante o pesticida que se desea rosear, los Monitores de Cosecha para
pronosticar las cosechas por hectárea, los kilogramos totales y la cantidad
de humedad en los granos, entre muchas otras.
Partiendo de este punto, en el siguiente proyecto, se plantea como
problema de estudio: Desarrollar un prototipo de sistema de control de
aireado, nivel de agua, movimiento de nutrientes y luz artificial para cultivos
hidropónicos de raíz flotante por medio de un PLC, y el control y
visualización del tiempo requerido para la cosecha del cultivo por medio de
un microcontrolador PIC, para solucionar la problemática presente en la

3
agricultura familiar urbana, con respecto a los costos en adquisición de
productos y la cantidad de tiempo de atención que requiere el cultivo.
Esta investigación comprende cuatro (4) capítulos, los cuales se
describen a continuación:
Capítulo I: Es donde se describe el problema de estudio, se plantean
las interrogantes en las cuales se basa la investigación, se definen tanto el
objetivo general como los objetivos específicos, se justifica la investigación y
por último se establecen las limitaciones y delimitaciones de la misma.
Capítulo II: En este se expresan los antecedentes de la investigación
y las bases teóricas, que son toda aquella teoría que se recopiló, para
sustentar y abordar la problemática estudiada, también se expone el cuadro
de operacionalización de variables y los términos básicos.
Capítulo III: En este capítulo se describe la metodología empleada
para el desarrollo de este prototipo de sistema de control.
Capítulo IV: Se describe y explica detalladamente, cada una de las
fases en las que consiste la creación del prototipo, más el análisis de
resultados obtenido de la recolección de datos.
Finalmente se expresan las conclusiones, recomendaciones, anexos y
referencias bibliográficas.

4
CAPÍTULO I
EL PROBLEMA DE INVESTIGACIÓN
1.1 PLANTEAMIENTO DEL PROBLEMA
La agricultura venezolana se ha visto beneficiada en los últimos
cincuenta (50) años por un grupo de medidas, como la extensión de los
sistemas de riego, la aplicación de la reforma agraria y la consolidación de
nuevas especies vegetales.
En la actualidad una parte importante del país es beneficiada por quinientos mil novecientos setenta y nueve (500.979) propiedades agropecuarias que ocupan una superficie total de treinta millones setenta y un mil ciento noventa y dos (30.071.192) hectáreas. En sus tierras se producen varios productos, destacando la producción cerealera de maíz, arroz, sorgo; la de oleaginosas, granos leguminosos, raíces y tubérculos, frutas, café, caña de azúcar y cacao. (CNTI, 2011, p.1)
Hace treinta (30) años la agricultura venezolana comenzó a
desarrollar y adaptar una nueva técnica a manera de ofrecer productos de
más alta calidad, sin la necesidad del uso de los suelos; esta técnica es la
hidroponia, según Hidroponias Venezolanas; “Los primeros años fueron
difíciles, principalmente por el poco conocimiento del uso de esta
tecnología.”, (2011, p.1). En la actualidad, se está tratando de desarrollar
tecnológicamente esta técnica, no solo para la agricultura a gran escala, sino

5
también para el avance de la agricultura familiar urbana. Con la
implementación de algunos sistemas de control, se puede lograr una mejora
en la eficiencia de la técnica, disminuyendo el gasto en mano de obra y
adquisición de productos.
Se define como sistema de control a un conjunto de componentes con
la capacidad de regular su propia conducta o la de otro sistema, con la
finalidad de lograr un funcionamiento predeterminado; desde el punto de
vista del tema de tesis, el desarrollo de este prototipo de sistema de control
con un autómata programable, que según Creative Commons; “… puede
definirse como un equipo electrónico programable en lenguaje no informático
y diseñado para controlar, en tiempo real y en ambiente industrial, procesos
secuenciales.” (2011, p.1); permitirá un avance en la hidroponia para
aplicaciones de agricultura familiar urbana.
En la hidroponia, debido a su forma de producción, se requiere de la
mano de obra humana. Ya que los cultivos, son sembrados sin tierra,
necesitan de ciertos tratamientos a lo largo del día, como que los nutrientes
asentados sean movidos con cierta frecuencia o que la solución nutritiva sea
aireada por cierto tiempo. Esto genera que el propietario del huerto le
dedique una gran cantidad de tiempo a la manutención del mismo.
1.2 INTERROGANTES DE LA INVESTIGACIÓN
1.2.1 Interrogante Principal
¿Cómo desarrollar el prototipo de sistema de control de aireado, nivel
de agua, movimiento de nutrientes y luz artificial por medio de un PLC

6
y controlar y visualizar el tiempo que requiere el cultivo para ser
cosechado por medio de un PIC, para cultivos hidropónicos de raíz
flotante en aplicaciones de agricultura familiar urbana?
1.2.2 Interrogantes Secundarias
¿Qué método de cultivo de raíz flotante será utilizado, para la
aplicación del prototipo a desarrollar?
¿Qué tipos de plantas serán cultivadas con el método de raíz flotante
seleccionado?
¿Durante cuánto tiempo deben ser ejecutados los procesos que se
controlarán?
¿Qué sensores y actuadores serán utilizados, para controlar las
variables del prototipo que se desea desarrollar?
¿Qué modelo de PLC seleccionar, para controlar las variables del
sistema de control propuesto?
¿Qué modelo de microcontrolador PIC seleccionar, para controlar y
visualizar el tiempo que requiere el cultivo para ser cosechado?
¿Cómo diseñar y desarrollar el programa de control de aireado, nivel
de agua, movimiento de nutrientes y luz artificial, basado en lenguaje
escalera para el PLC elegido?
¿Cómo diseñar y desarrollar el programa de control y visualización del
tiempo estimado para la cosecha del cultivo, para el microcontrolador
PIC elegido?

7
¿Cómo ejecutar el prototipo de sistema de control desarrollado,
basado en sensores, actuadores, PLC y microcontroladores PIC?
¿Es funcional el prototipo de sistema de control ejecutado?
1.3 OBJETIVOS DE LA INVESTIGACIÓN
1.3.1 Objetivo General
Desarrollar el prototipo de sistema de control de aireado, nivel de
agua, movimiento de nutrientes y luz artificial por medio de un PLC y
controlar y visualizar el tiempo que requiere el cultivo para ser
cosechado por medio de un PIC, para cultivos hidropónicos de raíz
flotante en aplicaciones de agricultura familiar urbana.
1.3.2 Objetivos Específicos
-Definir el método de cultivo de raíz flotante que será utilizado para la
aplicación del prototipo a desarrollar.
-Identificar en función del método seleccionado, las plantas que serán
cultivadas.
-Determinar el tiempo de ejecución de los procesos que se desean
controlar.

8
-Establecer los sensores y actuadores adecuados para cubrir las
variables del método de raíz flotante, que se desean controlar en el
desarrollo de este prototipo.
-Seleccionar el modelo de PLC adecuado, para controlar las variables
del sistema de control propuesto.
-Elegir el modelo de microcontrolador PIC adecuado, para controlar y
visualizar el tiempo que requiere el cultivo para ser cosechado.
-Diseñar y desarrollar el programa de control de aireado, nivel de
agua, movimiento de nutrientes y luz artificial, basado en lenguaje
escalera para el PLC elegido.
-Diseñar y desarrollar el programa de control y visualización del tiempo
estimado para la cosecha del cultivo, para el microcontrolador PIC
elegido.
-Ejecutar el prototipo de sistema de control desarrollado, basado en
sensores, actuadores, PLC y microcontroladores PIC.
-Evaluar la funcionalidad del sistema ejecutado.
1.4 JUSTIFICACIÓN DE LA INVESTIGACIÓN
Según Alvarado, D.; Chávez, F.; Wilhelmina, k.; “La producción sin
suelo permite obtener hortalizas de excelente calidad y asegurar un uso más
eficiente del agua y fertilizantes. Los rendimientos por unidad de área
cultivada son altos, con una mayor densidad y elevada producción por
planta, lográndose mayores cosechas por año.”, (2001, p.96).
La hidroponia es un método de cultivo reciente, aplicado exitosamente
en países desarrollados y puede ser muy bien empleado con tecnologías

9
más sencillas en las ciudades dentro del contexto de la llamada agricultura
urbana, esencialmente en zonas de extrema pobreza o con climas muy
variantes, a manera de favorecer el autoconsumo.
Entre los sistemas agro-urbanos, destacan los hidropónicos por ofrecer un mayor potencial para atenuar la inseguridad alimentaria y el empobrecimiento en las ciudades. La hidroponia social o popular ha demostrado ser una opción casi única en los diferentes países latinoamericanos donde se ha realizado la experiencia. El crecimiento futuro de la hidroponia dependerá mucho del desarrollo del sistema de producción para que sean competitivos en costos con aquellos de la agricultura tradicional. (Alvarado, D.; Chávez, F.; Wilhelmina, k. 2001, p.96).
A manera de conseguir un avance en la producción de cultivos
hidropónicos, el desarrollo de un sistema capaz de controlar ciertas variables
del método de raíz flotante, aportaría una solución para lograr esta
evolución. Es por esta razón, que en este trabajo de grado se desarrollará
un prototipo de sistema de control con un PLC y un microcontrolador PIC,
para mejorar tecnológicamente el área agrícola familiar urbana,
específicamente la hidroponia, debido a que es el sistema de cultivo del
futuro.
El PLC y el microcontrolador PIC utilizados, serán capaces de
controlar las variables del método de cultivo de raíz flotante seleccionado,
entre las cuales se encuentran el aireado de las plantas, el nivel de agua, el
movimiento de nutrientes, la incidencia de luz artificial en el cultivo y el
tiempo de cosecha. Utilizando sensores y actuadores que se adecuen a los
requerimientos del sistema.
El prototipo de sistema de control que se desea desarrollar es
innovador, debido a que en la agricultura, específicamente en la técnica de
cultivo hidropónico para aplicaciones de agricultura familiar urbana, no se ha

10
implementado en la actualidad, ya que en la mayoría de los cultivos no
existe la automatización con PLC o microcontroladores PIC.
Las principales virtudes del sistema serán:
-Servirá de ayuda a las familias.
-Disminuirá la cantidad de tiempo invertido en el cultivo.
-Disminuirá los costos en adquisición de productos, como fertilizantes
y controladores de plagas.
-Hará que el desarrollo del cultivo sea mucho más fácil y práctico.
-Mejorará el método de cultivo de raíz flotante seleccionado.
1.5 DELIMITACIONES DE LA INVESTIGACIÓN
1.5.1 Delimitación Temática
Las bases de este proyecto están ubicadas en el área de la ingeniería
electrónica analógica y digital, y en el área de la automatización, ya que el
prototipo a realizar, será un sistema de control, basado en sensores,
actuadores, autómatas programables y microcontroladores PIC. La utilidad
de este proyecto está definida en el área de la agricultura, específicamente
en la hidroponia.

11
1.5.2 Delimitación Geográfica
El desarrollo de este proyecto se realizó en la casa de la Bachiller
Iliana Alvarado, ubicada en Hoyo de la Puerta, Sector La Pared, municipio
Baruta, Edo. Miranda. La presentación del mismo se realizó en el
Laboratorio de Física de la Universidad Nueva Esparta, núcleo Los Naranjos,
ubicada en la Av. Sur 7, los Naranjos, municipio El Hatillo, Edo. Miranda. La
investigación documental se realizó en el hogar de la Bachiller antes
mencionada, y en los Laboratorios de la Universidad Nueva Esparta,
mientras que la investigación de campo se hizo en las compañías
Hidroponias Venezolana, ubicada en San Pedro, Edo. Miranda, y Benatural,
ubicada en La Unión, Municipio El Hatillo, Edo. Miranda.
1.5.3 Delimitación Temporal
Para el diseño, desarrollo y pruebas del prototipo de sistema de
control, se requiere de un tiempo estimado de seis (6) meses, que
comprenden del mes de Abril del 2011 al mes de Septiembre del mismo año,
con la finalidad de poder realizar todos los objetivos propuestos.
1.5.4 Delimitación Técnica
El siguiente trabajo de grado estará delimitado exclusivamente al
desarrollo de un prototipo de sistema de control de aireado, nivel de agua,
movimiento de nutrientes e incidencia de la luz artificial por medio de un

12
PLC, y el control y visualización del tiempo requerido para la cosecha del
cultivo por medio de un microcontrolador PIC, solo para el método de cultivo
hidropónico de raíz flotante elegido, en el área de agricultura familiar urbana,
donde el contenedor será de un tamaño adecuado para espacios reducidos,
típicos del interior o exterior de una residencia promedio. El tamaño de este
contenedor será seleccionado, según la planta que se desee cultivar y el
espacio que necesite entre planta y planta. Para el desarrollo del prototipo se
automatizará el proceso completo de la planta, desde su siembra, hasta su
cosecha, según el método de raíz flotante selecto, y se usarán tres (3)
variedades de plantas, las cuales serán escogidas, según el tiempo que
transcurra entre la siembra de la semilla, su germinación y el momento en el
que pueda ser cosechada. El PLC y el microcontrolador PIC serán escogidos
en función de las necesidades del prototipo de sistema de control, según las
características cualitativas y cuantitativas de los mismos.
1.6 LIMITACIONES DE LA INVESTIGACIÓN
Este proyecto puede estar limitado por las siguientes condiciones:
-Falta de presupuesto, ya que en la actualidad en Venezuela, la
situación económica es inflacionaria; lo cual se resolvió haciendo un
estudio de mercado, y seleccionando los dispositivos necesarios, pero
de más bajos costos, logrando así una reducción de presupuesto.
-Culminación del tiempo estimado para el desarrollo del prototipo,
debido a que el cultivo hidropónico de raíz flotante, implica un lapso
de tiempo para que las plantas cumplan con su proceso, el cual no
puede ser manipulado.

13
-Dificultades con respecto a la adquisición de los componentes,
instrumentos, hardware, software y manuales de funcionamiento a
consecuencia de la inexistencia de los mismos en el mercado
venezolano y del lento proceso de adjudicación de divisas; Debido a
la búsqueda exhaustiva, se logró solucionar esta problemática, ya que
se encontraron todos los componentes necesarios para el correcto
desarrollo del prototipo.
-Manejo y conocimiento eficiente del autómata programable y
microcontrolador PIC, seleccionados para su aplicación y desarrollo;
mediante un gran estudio de manuales y con la asistencia del Tutor
del proyecto, se logró manejar y programar satisfactoriamente estos
dispositivos sin ninguna problemática.

14
CAPÍTULO II
MARCO TEÓRICO
Para la elaboración de este proyecto se tomaron en cuenta algunos
antecedentes, considerándose estos, trabajos de investigación que preceden
al trabajo que se está realizando; los cuales determinaron estudios y
procedimientos aplicables para la elaboración del proyecto propuesto.
A su vez, la realización de este trabajo se debió a una revisión
documental con respecto a diferentes temas, como por ejemplo, la
automatización, la utilización de controladores lógicos programables y de
microcontroladores PIC, creando unas extensas bases teóricas que
sustentan y ayudan a solventar ciertas problemáticas que se presenten en el
desarrollo del proyecto, logrando así el cumplimiento de todos los objetivos
planteados.
2.1 ANTECEDENTES
Ing. Caldeyro, Martín. (2007). La Hidroponia Simplificada como
Tecnología Apropiada para Implementar la Seguridad Alimentaria en la
Agricultura Urbana. La hidroponia Simplificada es un paquete tecnológico
apropiado, desarrollado en América Latina, que se adapta a las condiciones
urbanas y peri-urbanas, debido a que permite la independencia del factor
“suelo”, lo cual posibilita controlar el sistema de producción. Se cultiva a

15
cierta altura, donde la contaminación del suelo no incide. Permite producir
vegetales “sin tierra” y en escaso “espacio físico”, se realiza en recipientes
con agua o en sustratos naturales de bajísimos costos (arena, cáscara de
arroz, piedra pómez, etc.). Permite cultivar una muy amplia variedad de
vegetales, por ejemplo lechugas, tomates, zanahorias, apio, berro (ver Figura
n° 1), berenjenas, porotos, perejil, rabanitos, puerros, frutillas, melones,
flores, plantas aromáticas y medicinales, etc.
Figura n° 1 Cultivo de Berros y Lechugas Inocuas, en Cajas Plásticas Elevadas del Suelo.
Fuente: La Hidroponia Simplificada como Tecnología Apropiada para Implementar la Seguridad Alimentaria en la Agricultura Urbana. (2007).
El aporte de este trabajo de investigación, es que el proyecto que se
desea desarrollar está basado principalmente en los cultivos hidropónicos
para aplicaciones de agricultura urbana, demostrando que es una
metodología de siembra de fácil acceso para todas las personas, y que
permite alimentos de alta calidad en espacios reducidos.

16
Santander, Francisco. (2007). El cultivo de Tomates Hidropónicos.
El cultivo hidropónico ha tenido un gran aumento con respecto a su
aceptación a nivel del mercado mundial por sus características orgánicas y el
poco uso de tóxicos y plaguicidas. Uno de los cultivos más rentables por el
valor del producto es el del tomate o jitomate (ver Figura n° 2). Hay varias
especies de tomate, muchas son costosas pero dan excelentes resultados ya
que su producción y germinación pueden ser predecibles y se conoce el
tamaño y productividad de las plantas. La ventaja de cultivar tomate
hidropónico en ambiente controlado es la capacidad de modificar todos los
factores relacionados con su desarrollo de forma minuciosa, evitar las
pérdidas de agua por evaporación, controlar la temperatura, el riego es más
efectivo, el control de los efectos de la intemperie y la capacidad de aislarlo
de las posibles plagas y, sobre todo, la ventaja es poder aislarlo del suelo
que le puede aportar salinidad, concentraciones inadecuadas de nitratos y
otros minerales, humedad inadecuada, oxigenación pobre de las raíces y
enfermedades.
Figura n° 2 Tomates Hidropónicos
Fuente: Ciencia y Agricultura. (2010).

17
El aporte de esta monografía, para este trabajo de grado, es que
facilita las características de una especie de planta que puede ser cultivada
con hidroponia, exponiendo las condiciones bajo las cuales la planta debe
ser tratada y el resultado que dará la misma si se cumple con estas
condiciones. Viendo esto se puede tomar en cuenta como especie para el
desarrollo de este proyecto, el tomate.
Mezones, Yoel. (1997). Automatización de Máquina
Empaquetadora de Granos Mediante el Empleo de PLC (Controlador
Lógico Programable). Este Trabajo de grado está basado en el desarrollo
de un proyecto de automatización para una máquina empaquetadora de
granos, marca Gaza, modelo Palmar II, perteneciente a la empresa
Comagravi C.A. cuyo objetivo es el aumento de la eficiencia, funcionamiento
y rendimiento de la máquina, con la sustitución del control o base lógica
cableada por un sistema basado en lógica programable, mediante el empleo
de controladores lógicos programables.
El aporte de este trabajo de grado, para este proyecto es que se
tomaron como referencias los principios de operación de un controlador
lógico programable y las diversas indicaciones técnicas, como por ejemplo, la
instalación eléctrica, los periféricos y el montaje mecánico. A su vez al igual
que en este proyecto, se quiere mejorar la eficiencia de un sistema, en este
caso la del cultivo hidropónico, aumentando así su rendimiento.
Cesaredo, Felipe. (2006). Sistema de Control Mediante Mensajes
SMS y Microcontroladores. Debido al explosivo uso de los celulares y la
integración que sufren estos a lo largo del tiempo, es muy atractivo como
programador utilizar esta herramienta como un medio para generar

18
aplicaciones que sean útiles y aplicables al mercado actual, es por esto que
crear una aplicación que por medio de mensajes cortos de texto SMS se
puedan controlar eventos utilizando un microcontrolador (ver Figura n° 3), no
es algo fuera de nuestro alcance y amplia nuestra capacidad de interacción
con el medio, por ejemplo, y tal como podemos pedir el estado del tiempo por
SMS, podríamos activar la alarma de la casa o bien si esta activada recibir un
mensaje con la alarma, también se podría utilizar en el control de frigoríficos,
etc. Son tantos los problemas que podrían encontrar solución con una
aplicación de este tipo, que solo es cosa de usar la imaginación.
Figura n° 3 Modelo de Recepción y Envío de Mensajes SMS
Fuente: Sistema de Control Mediante Mensajes SMS y Microcontroladores. (2006).
El aporte de este trabajo de grado al proyecto que se desea
desarrollar, es que se pudo ver el uso de microcontroladores PIC en un
sistema de control, visualizando las principales características del PIC, como
su arquitectura, su composición, los recursos especiales y las diferentes
familias. En este caso el PIC se utilizó para controlar todo el sistema, pero
para el desarrollo de este prototipo solo se necesita controlar una parte del
sistema, por lo que el trabajo es menos complejo.

19
2.2 BASES TEÓRICAS
2.2.1 Hidroponia
La hidroponia es la ciencia que se encarga del estudio de los cultivos
sin tierra, y su nombre viene de las palabras griegas “hydro” que significa
agua y “ponos” que significa trabajo. Esta ciencia se origina de la necesidad
de producir alimentos en regiones que no poseían tierras fértiles, pero que si
tenían fuentes de agua suficientes. Según, la Oficina Regional de la FAO
para América Latina y el Caribe (ver Figura n° 4); “Hubo civilizaciones
enteras que usaron variantes parecidas a la hidroponia como medio de
subsistencia, y existen datos históricos que sustentan la afirmación de que
los cultivos hidropónicos se conocían en diversas localizaciones geográficas.
Uno de estos datos son las descripciones de los “Jardines Colgantes de
Babilonia” que se describía recibían riego por canales de agua.”. (2005, p. 5).
Figura n° 4 Logo de la FAO
Fuente: Página Oficial de la FAO. (1998).
La hidroponia o cultivo sin tierra permite, con un reducido consumo de
agua y mucha dedicación y constancia, la producción de hortalizas frescas,
sanas y abundantes en pequeños espacios. Teniendo como objetivo
principal, mejorar la calidad y cantidad de la alimentación familiar, sin la

20
necesidad de implicar una gran cantidad de costos. Una de las ventajas que
presenta esta técnica, es que provee a las raíces un nivel de humedad
constante, independientemente del clima donde se esté cosechando el
cultivo.
La Hidroponia es la forma de cultivar plantas sin tierra. Para ello, se utiliza una combinación precisa de diferentes sales minerales que contienen todos los nutrientes que requieren las plantas para su desarrollo y que habitualmente les entrega la tierra, diluidas en agua potable (solución nutritiva), la cual se aplica directamente a las raíces de diferente forma, según el método de cultivo hidropónico que se adopte. Esta forma de Cultivo se puede aplicar a cualquier tipo de planta, ya sean para consumo o decorativas y puede practicarse tanto en espacios abiertos como cerrados. Actualmente, el concepto de hidroponia es conocido mundialmente. En EE.UU, Europa y Japón, existen grandes establecimientos dedicados a la producción de este tipo de cultivos, destinados fundamentalmente al abastecimiento de hortalizas frescas a la población. (GCA S.A. 1985. 18 págs.).
Sus comienzos datan del siglo XVII, cuando un inglés llamado John
Woodward, hizo sus observaciones sobre lo importante de los minerales
disueltos en agua, en la nutrición de las plantas. Sin embargo, no fue hasta
que el botánico alemán Julio Von Sachs, en el año 1860, realizó las primeras
conclusiones científicas que aprobaban la posibilidad de efectuar cultivos sin
tierra, que se demostró, bajo determinadas condiciones que si se podía
cultivar plantas prescindiendo de tierra. Solo hacía falta diluir con agua
ciertas cantidades de químicos, para que estas crecieran con total
normalidad. Según, GCA S.A: “Solamente medio Siglo después, la
comunidad científica mundial aceptó las conclusiones de Von Sachs y
comenzó una nueva era en el desarrollo de cultivos hidropónicos: la de
transformar las experiencias de laboratorio en ensayos prácticos que
permitieran obtener cultivos de mayor producción a menor costo.”. (1985. 18
págs.).

21
2.2.1.1 El Pasado de la Hidroponia
Este método de cultivo debe su desarrollo, a los hallazgos de
experimentos llevados a cabo en los años 1600, para determinar que
sustancias hacían crecer a las plantas. Sin embargo, se conoce que esta
metodología es mucho más antigua, ya que se practicaba, pero en una forma
más primitiva en Cachemira (ver Figura n° 5), que es una región situada en el
Himalaya.
Figura n° 5 Ubicación de Cachemira
Fuente: Guía de los Países de Asia. (2008).
En un mundo súper poblado, con climas cambiantes, suelos
erosionados e índices muy elevados de contaminación, la hidroponia brinda
una gran cantidad de posibilidades donde los cultivos tradicionales están
agotados como alternativa, ya que tiene una gran cantidad de características
especiales, como los siguientes:

22
Cultivos libres de parásitos, bacterias, hongos y contaminación.
Reducción de costos de producción.
Independencia de los fenómenos meteorológicos.
Permite producir cosechas en contra estación.
Menos espacio y capital, para una mayor producción.
Ahorro de agua, fertilizantes e insecticidas.
Se evita maquinaria agrícola.
Alto porcentaje de automatización.
El cultivo hidropónico es anterior al cultivo en tierra, muchos creen que
comenzó en la antigua Babilonia, con una de las Siete Maravillas de Mundo,
como lo son los Jardines Flotantes, donde se muestra lo que probablemente
fueron los primeros intentos exitosos de cultivar plantas sin la necesidad del
uso de tierra.
Los aztecas de Centroamérica, una tribu nómada forzada a ubicarse hacia la orilla pantanosa del Lago Tenochtitlán, localizado en el gran valle central de lo que es ahora México, y tratados bruscamente por sus vecinos más poderosos que les negaron cualquier tierra cultivable, sobrevivieron desarrollando notables cualidades de invención. Como consecuencia de la falta de tierra, decidieron hacerlo con los materiales que tenían a mano; en lo que debe haber sido un largo proceso de ensayo y error, ellos aprendieron a construir balsas de caña, dragaban la tierra del fondo poco profundo del lago y la amontonaban en las balsas. Debido a que la tierra venía del fondo del lago, era rica en una variedad de restos orgánicos y material descompuesto que aportaba grandes cantidades de nutrientes. Estas balsas, llamadas Chinampas, permitían cosechas abundantes de verduras, flores e incluso árboles eran plantados en ellas. Las raíces de estas plantas presionaban hacia abajo y traspasaban el suelo de la balsa hasta el agua. (Departamento de Agricultura y Comercio de los Estados Unidos. 2003. 30 págs.).

23
Este método de cultivo llegó a formar islas flotantes, las cuales
asombraron a los españoles durante el siglo XVI.
En los años que siguieron a la investigación de Woodward, filósofos
de las plantas, demostraron que el agua era absorbida por las raíces de las
plantas y que esta atraviesa su sistema capilar, y escapa en el aire a través
de los poros de las hojas. También descubrieron que la planta toma
minerales tanto del suelo como del agua y que las hojas expulsan dióxido de
carbono al aire.
Entre los años 1930 y 1935, se desarrolló extensamente el cultivo sin
suelo, modificando las técnicas de nutricultura para lograr producir cosechas
a gran escala. Esto se logró gracias al Dr. William F. Gericke de la
Universidad de California, que extendió sus experimentos en laboratorios a
cosechas prácticas en aplicaciones comerciales a gran escala, dándole por
nombre a este método, Hidroponia. Sin embargo, antes del año 1930, todos
los estudios realizados sobre cultivos sin suelo, se orientaron a laboratorios,
para fines experimentales, la nutricultura, quimicultura y acuicultura eran los
términos utilizados para describir la cultura del cultivo sin tierra.
El método del Dr. Gericke, consistía en una serie de contenedores
sobre los cuales se extendía una malla delgada de alambre, y en esta malla
se colocaban las plantas con la raíces hacia abajo, para que estas entraran
en contacto con el agua mezclada con la solución nutritiva. Este método dio
como resultado plantas de tomates de hasta siete metros (7mts) de altura.
Sin embargo, tenía algunos problemas, el primero de ellos, era que las
plantas consumirían rápidamente por las raíces el oxigeno y por esta razón
era indispensable que se suministrara oxígeno fresco a la solución, a través
de un sistema de aireación.
Hoy en día, la hidroponia es el término, que engloba todo método de
producción agrícola que no necesite del suelo para el cultivo de las plantas,
los cuales incluyen el cultivo en recipientes llenos de agua o cualquier otro

24
medio inerte como arena, vermiculita, cascarilla de arroz, entre otros. Según
el Departamento de Agricultura y Comercio de los Estados Unidos; “Todo
esto se hace posible por la relación entre la planta y sus elementos
nutrientes. No es tierra lo que la planta necesita; son las reservas de
nutrientes y humedad contenidos en la tierra, así como el apoyo que la tierra
da a la planta.”. (2003. 30 págs.). Así pues, si se coloca la planta en un
medio inerte que le dé el mismo soporte que le brinda la tierra y se le
suministra los nutrientes necesarios, se pueden obtener plantas grandes y
mucho más rápido de lo que se hace por el sistema convencional.
Después del acertado experimento con tomates del Dr. Gericke, varios
agrónomos empezaron a trabajar para simplificar y perfeccionar el
procedimiento. Se han construido una gran cantidad de huertos hidropónicos
a gran escala, en países como México, Puerto Rico, Hawaii, Israel, Japón,
India y Europa; Y según el Departamento de Agricultura y Comercio de los
Estados Unidos; “En los Estados Unidos, sin mucho conocimiento del
público, la hidroponia se ha convertido en un gran negocio; más de 500
invernaderos hidropónicos han sido construidos y desarrollados.”. (2003. 30
págs.).
Una de las variantes del método de William F. Gericke, se aplicó para
suplir de alimentos a las tropas ubicadas en las islas no cultivables del
Océano Pacífico, al inicio del año 1940. Durante la Segunda Guerra Mundial
y usando como medio inerte arena gruesa, la hidroponia dio la prueba, de
que si era factible y viable para la obtención de verduras frescas.
La primera granja hidropónica fue construida en la isla la Ascensión
(ver Figura n° 5), en al Atlántico Sur, por la Fuerza Aérea de los Estados
Unidos, para mantener a las tropas que se alojaban en la Base Aérea (ver
Figura n° 6), ubicada en esa isla de origen volcánico. Así como en esta isla,
la Fuerza Aérea de los Estados Unidos, fue implementando diferentes
técnicas de hidroponia en las islas donde tenían bases militares, para

25
abastecer a las tropas, de esta manera esta técnica de agricultura se fue
propagando por el resto del mundo.
Figura n° 6 Isla La Ascensión
Fuente: Petróleo: Inglaterra Quiere Extenderse en Malvinas. (2008).
Figura n° 7 Base Aérea de la Isla La Ascensión
Fuente: Incidentes OTAN – URSS. (2011).
Cuando la hidroponia llegó a la India, en el año 1946, era un sistema
sumamente costoso y complicado, por lo que no era apto para ser
implementado. Estos requerían de un sistema más simple y práctico, así que
fueron cambiando la técnica, hasta llegar al sistema Bengalí, que era un
sistema simple y barato, que podía ser utilizado en cualquier parte del mundo

26
para cultivar vegetales, este sistema es aplicado a pequeña y a gran espala,
pero con diferentes modalidades, de esto se desprenden los diferentes
métodos de cultivo hidropónico.
2.2.1.2 La Hidroponía en la Actualidad
En la actualidad la hidroponia ha avanzado con pasos agigantados,
desde la invención del plástico, ha mejorado en un 100%, ya que no es
necesario el uso de contenedores y válvulas metálicas, que sueltan
sustancias dañinas para las plantas, en la solución nutritiva. El plástico libró a
los agricultores de construcciones costosas y complejas, logrando la
simplicidad y factibilidad que se buscaba con el desarrollo de esta técnica.
Con respecto a la nutrición de las plantas, con la realización de
infinidad de estudios y experimentos, se ha logrado llegar a soluciones
nutritivas más equilibradas, que brindan al cultivo la cantidad de nutrientes
justa y necesaria para su perfecto desarrollo. También da la oportunidad al
agricultor de preparar su propia solución o simplemente comprar una
solución concentrada que pueda ser diluida y aplicada con facilidad.
Además del progreso que se logró con el plástico y la solución
nutritiva, otro factor de gran importancia es el desarrollo de la tecnología, que
ha permitido la automatización de los invernaderos en diferentes aspectos,
como por ejemplo, el control de temperatura en lugares con climas extremos.
Hay sistemas hidropónicos grandes y pequeños, usados tanto a nivel
comercial como a nivel particular. Los cultivadores comerciales, están
usando esta técnica para producir alimentos a gran escala, en todas las
regiones del mundo, desde las más frías hasta las más áridas, también se
están creando complejos hidropónicos con unidades de desalinización para

27
poder usar el agua del mar. Mientras que los cultivadores particulares, usan
la técnica, para abastecer a sus familias de un alimento, rápido, rico, fresco y
cosechado en casa.
2.2.1.3 Sistemas de Cultivo Hidropónico
El principio de suministrar la solución nutritiva a la planta, es siempre
el mismo, este consiste en humedecer las raíces de dicha planta con una
solución de sales balanceadas, sin embargo, el método para lograr este
cometido puede variar según las funciones y necesidades del dueño del
cultivo y de la planta.
Existen dos sistemas principales, que son el sistema de raíz flotante y
el sistema de sustrato sólido, de estas dos grandes gamas se desprenden
diferentes métodos, como por ejemplo, el método con placas de anime, el
método NFT o recirculante, el método de riego por goteo, el método de
mangas verticales, entre muchos otros.
Existen varios métodos de cultivo con diversos materiales que son utilizados como sustratos, los cuales sirven de contención de las raíces; entre estos métodos sobre sale el cultivo en agua, grava, arena, serrín, lana de roca, turba perlita, vermiculita y mezclas de dos o más sustratos. Dependiendo de lo que se va a producir y su importancia económica es la selección del método de cultivo con el material adecuado como sustrato. Para elegir el método y sustrato óptimo se debe considerar, que sea fácil de conseguir y de bajo costo, que no se degrade o descomponga con facilidad, que retenga humedad y que no sea salino. (Alvarado, D. Chávez, F. Wilhelmina, K. 2001. 96 págs.).

28
Los métodos más comunes de cultivo hidropónico difieren en algunos
detalles, pero cuentan con dos rasgos habituales, el primero es que los
nutrientes se aportan en soluciones líquidas y el segundo es que las plantas
se sostienen sobre materiales porosos. Entre estos métodos se encuentran
los siguientes:
Sistema de Raíz Flotante
Este sistema consiste principalmente en que las raíces de las plantas
estén en contacto directo con la solución nutritiva. Según la versión del
método de raíz flotante que se utilice, la cosecha de la planta se puede
realizar en tres fases o en una sola, todo depende del lugar donde se ubique
el contenedor y de su practicidad. Según Alvarado, D. Chávez, F.
Wilhelmina, K.: “Dentro de este sistema, se pueden encontrar varios métodos
bien específicos, como el de las placas de anime o el NFT, y a su vez se
pueden encontrar versiones donde se unifican dos métodos diferentes.”.
(2001. 96 págs).
Placas de Anime: 1Este método consiste en tres etapas, almacigo,
primer trasplante y trasplante definitivo. Para la primera etapa (ver
Figura n° 8), se coloca en bandejas de cualquier material, algún tipo
de sustrato, bien sea cascarilla de arroz, vermiculita, aserrín, etc. Y
dentro de esta bandeja se coloca a cierta distancia, entre surco y
surco y planta y planta, según el tipo de cultivo, las semillas de la
1 Oficina Regional de la FAO para América Latina y el Caribe. 2003. Manual de Hidroponia
Popular, Una Necesidad. (en línea). 3ed. Santiago, CL. 180 págs. Consultado 26 abril 2011. Disponible en http://www.elmejorguia.com/hidroponia/Manual%20de%20hidroponia.htm

29
planta. Estas semillas estarán en este contenedor, hasta la
geminación de la planta (ver Figura n° 9), que estará estipulada, por el
cultivo que se está cosechando. Una vez pasados los días específicos
para la germinación de cada planta, se procede al primer trasplante,
este consiste en pasar las plántulas germinadas a placas de anime,
perforadas a cierta distancia, en estos agujeros se colocará la plántula
sostenidas con algún material poroso (ver figura n° 10), como por
ejemplo, esponjas, la placa de anime flotará en la solución nutritiva,
manteniendo las raíces de la planta en contacto directo con la
solución (ver Figura n° 11). La planta permanecerá en este
contenedor, algunos días, según el tipo de cultivo, cumpliendo con
procesos como aireado y movimiento de nutrientes, para evitar la
estanqueidad de la solución. Por último se hará el trasplante definitivo,
cuyo procedimiento es igual al primar trasplante, pero con una
distancia diferente entre los agujeros del anime. La planta se
encontrará en este contenedor hasta el día de su cosecha (ver Figura
n° 12). Como todo proceso en la actualidad, en este método se han
realizado algunas aplicaciones tecnológicas, como por ejemplo el uso
de bombas de aire (ver Figura n° 13).
Figura n° 8 Bandejas de Sustrato
Fuente: Lechugas Hidropónicas: Almacigos. (2007).

30
Figura n° 9 Germinación de la Lechuga Simpson a 10 Días de la Siembra
Fuente: Guía para el Cultivo de Lechuga Hidropónica: Germinación. (2003).
Figura n° 10 Trasplante para la Siembra de Raíz Flotante de la Lechuga Simpson
Fuente: Guía para el Cultivo de Lechuga Hidropónica: Trasplante. (2003).
Figura n° 11 Lechugas a 14 Días Después del Trasplante
Fuente: Guía para el Cultivo de Lechuga Hidropónica: Cultivo en Raíz Flotante. (2003).

31
Figura n° 12 Cosecha de Lechuga Simpson en Sistema de Raíz Flotante
Fuente: Guía para el Cultivo de Lechuga Hidropónica: Cultivo Comercial. (2003).
Figura n° 13 Bancales para Sistema de Raíz Flotante
Fuente: Cultivos Hidropónicos. (2005).
Sistema NFT o Recirculante: 2En este sistema de raíz flotante, las
raíces de las plantas no están sumergidas permanentemente en la
solución, sino, que son bañadas cada cierto tiempo con esta. Este
método se puede hacer cumpliendo con las tres etapas del sistema
con placas de anime, o cumpliendo una sola etapa. Para el primer
caso, se procede de la manera anteriormente explicada, es decir, que
2 Oficina Regional de la FAO para América Latina y el Caribe. 2003. Manual de Hidroponia
Popular, Una Necesidad. (en línea). 3ed. Santiago, CL. 180 págs. Consultado 26 abril 2011. Disponible en http://www.elmejorguia.com/hidroponia/Manual%20de%20hidroponia.htm
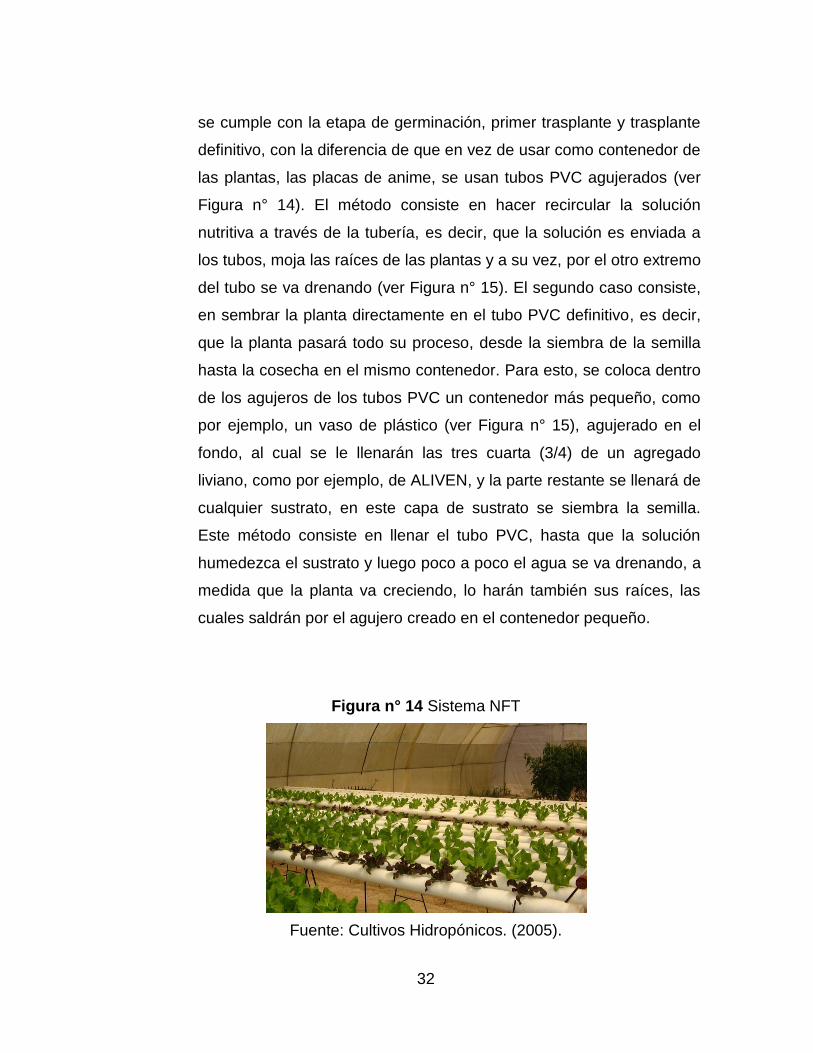
32
se cumple con la etapa de germinación, primer trasplante y trasplante
definitivo, con la diferencia de que en vez de usar como contenedor de
las plantas, las placas de anime, se usan tubos PVC agujerados (ver
Figura n° 14). El método consiste en hacer recircular la solución
nutritiva a través de la tubería, es decir, que la solución es enviada a
los tubos, moja las raíces de las plantas y a su vez, por el otro extremo
del tubo se va drenando (ver Figura n° 15). El segundo caso consiste,
en sembrar la planta directamente en el tubo PVC definitivo, es decir,
que la planta pasará todo su proceso, desde la siembra de la semilla
hasta la cosecha en el mismo contenedor. Para esto, se coloca dentro
de los agujeros de los tubos PVC un contenedor más pequeño, como
por ejemplo, un vaso de plástico (ver Figura n° 15), agujerado en el
fondo, al cual se le llenarán las tres cuarta (3/4) de un agregado
liviano, como por ejemplo, de ALIVEN, y la parte restante se llenará de
cualquier sustrato, en este capa de sustrato se siembra la semilla.
Este método consiste en llenar el tubo PVC, hasta que la solución
humedezca el sustrato y luego poco a poco el agua se va drenando, a
medida que la planta va creciendo, lo harán también sus raíces, las
cuales saldrán por el agujero creado en el contenedor pequeño.
Figura n° 14 Sistema NFT
Fuente: Cultivos Hidropónicos. (2005).

33
Figura n° 15 Cultivo Hidropónico con Sistema NFT
Fuente: Manual de Hidroponia Popular: Una Necesidad. (2003)
Figura n° 16 Banca de Floración Escalonada
Fuente: Sistema de Cultivo: Cultivo de Floración. (2007).

34
Sistema en Sustrato Sólido
Según el Manuel de Hidroponia Popular: Una Necesidad; Este sistema
hidropónico, difiere del método de raíz flotante, en que las raíces de las
plantas se desarrollan en un medio sólido (ver Figura n° 17). Y existen dos
métodos principales, el método por goteo y el método en mangas verticales.
En este tipo de sistema no es necesario, trasplantar la planta, es decir, que la
planta puede estar en todas sus etapas en el mismo contenedor, pero, si la
semilla es sembrada en un almacigo (ver Figura n° 18), es necesario
cambiarla de lugar después de su germinación, debido a que el espacio de
los contenedores para almacigo es muy pequeño, para el correcto desarrollo
de la planta. (2003, 180 págs.).
Figura n° 17 Siembra en Sustrato Sólido
Fuente: Trucos para Sembrar Semillas con Éxito. (2004).

35
Figura n° 18 Siembra en Almacigos
Fuente: Cuidado y Trasplante de Plántulas en Almacigos
Sistema por Goteo: Este sistema consiste en regar la planta
mediante goteo (ver Figura n°19), es decir, que la solución será
suministrada constantemente mediante pequeñas gotas. Para esto se
colocan las semillas o las plántulas en un contenedor con un sustrato
cualquiera y se bombea la solución nutritiva, por diferentes
mangueras, hasta cada una de las plantas (ver Figura n° 20). Según
Sistemas de Riego en la Agricultura: Sistema de Riego por Goteo: “El
riego por goteo tiene las siguientes ventajas: considerable ahorro del
agua, se mantiene un nivel de humedad constante sin
encharcamiento, da la posibilidad de regar cualquier tipo de terreno,
se tiene una elevada uniformidad y es aplicable a pequeña, mediana y
gran escala.” (2010).

36
Figura n° 19 Cultivo en Sustrato con Bombeo Continuo de Nutrientes
Fuente: Hidroponia Popular: Una Necesidad. (2003).
Figura n° 20 Sistema de Riego por Goteo
Fuente: Sistemas de Riego en la Agricultura: Sistema de Riego por Goteo. (2010).
Sistema en Mangas Verticales: Este sistema corresponde a mangas
o bolsas colgadas verticalmente, rellenas de cualquier sustrato (ver
Figura n° 21), según Hidroponía Popular: Una Necesidad: “Las
mangas verticales de hidroponia son un sistema de cultivo eficiente
para espacios pequeños y se usan para cultivar especies de hortalizas
de hojas, como lechuga, espinacas, berros, y otras que puedan crecer
sin ejercer un excesivo peso o que produzcan raíces que puedan

37
romper las bolsas.” (2003, p.180). Una vez rellenas las mangas con el
sustrato humedecido, esta es perforada a cierta distancia entre planta
y planta, colocando hileras a determinada distancia, según el diámetro
de la manga, en estos agujeros se colocan las plántulas germinadas y
se procede con el riego (ver Figura n° 22), este sistema no es apto
para siembra directa, ya que las semillas al germinar no encontrarían
una salida. El riego de la manga puede ser manual, o automático,
conectando en la parte superior una manguera, y se impulsa la
solución mediante bombas (ver Figura n° 23), debido a la posición de
la manga el sustrato se humedece en su totalidad por gravedad, la
solución excedente se puede recoger en la parte inferior de la manga,
para ser reutilizada. Este tipo de cultivo es muy beneficioso ya que el
recipiente es económico y fácil de usar, ya que las mangas vienen
fabricadas con distintos diámetros y calibres, siendo preferibles las de
calibre 0,20 para poder soportar el peso del sustrato.
Figura n° 21 Mangas Antes de la Producción Hidropónica
Fuente: Hidroponia Popular: Una Necesidad. (2003).

38
Figura n° 22 Esquema de Preparación de una Manga Vertical para Hidroponia
Fuente: Hidroponia Popular: Una Necesidad. (2003).
Figura n° 23 Mangas Verticales Regadas por Bombeo
Fuente: Hidroponia Popular: Una Necesidad. (2003).
39
2.2.1.4 Localización e Instalación de una Huerta Hidropónica
Uno de los primeros pasos que se debe tomar para realizar un cultivo
hidropónico, es definir el lugar donde se ubicará el contenedor de las plantas.
Estos contenedores pueden ser localizados en distintos lugares de una
vivienda, como por ejemplo, paredes, techos, ventanas, patios y terrazas,
pero hay que tener en cuenta criterios importantes, para lograr una mayor
eficiencia. Según Hidroponia Popular: Una Necesidad: “El criterio más
importante es ubicar la huerta en un lugar donde reciba por lo menos seis (6)
horas diarias de luz. Para esto es recomendable utilizar espacios con buena
iluminación.”. (2003, p.180). Otro criterio de importancia es ubicar el
contenedor cerca de una fuente de agua, para evitar el esfuerzo de
transportar los volúmenes de agua que se necesitan. También es necesario,
tener cerca los implementos que se utilizan para el cuidado de las plantas,
como por ejemplo, el pulverizador, la solución nutritiva y la regadera, ya que
son implementos que se usan con frecuencia.
Es importante que el huerto hidropónico este protegido contra posibles
ataques de animales, como perros, gatos o pájaros, ya que las plantas
pudiesen ser comidas o maltratadas. Y por último se debe proteger la
plantación de climas extremos, como heladas o sequias.
2.2.1.5 Sustratos Sólidos
Según Infoagro: “Un sustrato es todo material sólido distinto del suelo,
natural, de síntesis o residual, mineral u orgánico, que, colocado en un
contenedor, en forma pura o en mezcla, permite en anclaje del sistema

40
radicular de la planta, desempeñando, por tanto, un papel de soporte para la
planta.”. (2005, p.2).
Este sustrato no debe contener sustancias minerales solubles, para
evitar que la solución nutritiva se altere, debido al desbalance químico que se
puede producir, a demás de esto, no debe contener ninguna forma viva, ni
macro y micro, para así disminuir el riesgo de que se propaguen
enfermedades a las plantas y personas o animales que consumirán estas
mismas.
Lo más recomendable para un buen sustrato es que las partículas que lo componen tengan un tamaño no inferior a 0,5 y no superior a 7 milímetros, que retengan una buena cantidad de humedad pero que además faciliten la salida de los excesos de agua, que no se descompongan o degraden con facilidad, que no contengan elementos nutritivos, que no contengan micro organismos perjudiciales a la salud de los seres humanos o de las plantas, que sean livianos, de bajo costo, que no contengan residuos industriales o humanos y que sean fáciles de conseguir. (Manual de Hidroponia Popular: Una Necesidad, 2003, p.180).
En conclusión para que un sustrato sea ideal, se requiere de ciertas
características físicas, químicas y biológicas para lograr buenos resultados
durante la germinación, enraizamiento y crecimiento de las plantas.
Propiedades Físicas
Todos los sustratos deben contar con las siguientes propiedades
físicas, para que se consideren un buen sustrato:

41
Porosidad: Es el volumen total del sustrato no ocupado por las
partículas sólidas, que en cambió será ocupado por aire o agua, en
determinada porción (ver Figura n° 24). El valor óptimo de este
volumen debe ser de 80% a 85%, sin embargo, los sustratos de
menor porosidad pueden ser usados en determinadas condiciones.
Esta porosidad debe ser abierta, ya que la porosidad cerrada, al no
estar en contacto con el espacio abierto, no sufre de intercambios de
fluidos con él, y por lo tanto no es útil como almacén para la raíz, es
decir, que el grosor de los poros condiciona la aireación y la retención
de agua del sustrato (ver Tabla n° 1).
Figura n° 24 Volúmenes Relativos de Material Sólido, Líquido y Gaseoso en un Buen Sustrato
Fuente: Los Sustratos para Hidroponia. (2001).

42
Tabla n° 1 Capacidad de Retención de Agua
SUSTRATO CAPACIDAD DE RETENCION DE AGUA
A CAPACIDAD DE CAMPO
% en peso % en volumen
Grava 4.2 6.7
Granulados de vidrio
3.0 4.8
Pómez 59.1 20.4
Escorias de carbón
49.7 34.7
Escorias volcánicas
14.5 13.0
Sílice 4.9 7.8
Vermiculita 382.0 43.6
Arcilla expandida 28.0 14.0
Arena 12.0 16.0
Cascarilla de arroz cruda
40.0 11.0
Lana de Roca 1300 80.0
Cascarilla de Arroz Quemada
50.0 14.0
Cáscara de Coco 780 70
Fuente: Los Sustratos para Hidroponia. (2001).
Densidad: Esta se clasifica en dos tipos, la primera es la densidad
real, que se refiere al material sólido que compone al sustrato, y suele
oscilar entre 2,5 y 3 Kg/dm3 para la mayoría de los sustratos de origen
mineral; y la segunda es la densidad aparente, que se refiere a la
densidad calculada, considerando tanto el espacio ocupado por los
componentes sólidos, como el espacio poroso y suele oscilar entre 0,7
y 0,1 Kg/dm3 (ver Tabla n° 2).

43
Tabla n° 2 Densidad de Algunos Sustratos
Sustratos Kg/dm³ (Peso Seco)
Cortezas 0.20 - 0.30
Arena 1.40 - 2.00
Pómez 0.50-0.90
Cascarilla de arroz 0.120
Escoria de carbón 0.60-0.850
Fuente: Los Sustratos para Hidroponia. (2001).
Estructura: La estructura de los sustratos, puede ser de dos tipos, la
primera es granular (ver Figura n° 25), esta no tiene una estructura
estable y se acopla con facilidad a la forma del contenedor; mientras
que la segunda es de estructura fibrilar (ver Figura n° 26), estas tienen
facilidad de cambio de volumen y consistencia cuando pasan de un
estado seco a mojado y viceversa, también si se usa algún tipo de
cementación se les puede dar una forma cualquiera.
Figura n° 25 Estructura Granular
Fuente: Todo Sobre Acuaponia: Práctica en Acuarios. (2007).

44
Figura n° 26 Estructura Fibrilar
Fuente: Sustrato. (2003).
Granulometría: Se refiere al tamaño de los gránulos o fibras del
sustrato (ver tabla n° 3), de esto depende la porosidad del sustrato,
mientras más grandes son los granos, mayor es el poro, y mientras
más pequeño es el grano, menor es su separación.
Tabla n° 3 Granulometría
Categoría Tamaño (mm) Contenido deseable (%)
Gravilla > 2 0
Arena Muy Gruesa
1 - 2 0 - 5
Arena Gruesa 0.5 - 1.0 70 - 80
Arena Media 0.25 - 0.5
Arena Fina 0.1 - 0.25 0 - 20
Arena muy Fina 0.05 - 0.1 0 - 2
Limo y Arcilla < 0.05 0
Fuente: Los Sustratos para Hidroponia. (2001).

45
Para finalizar con las propiedades físicas de los sustratos, se presenta
un resumen (ver Tabla n° 4), con todas estas características, según el tipo de
sustrato.
Tabla n° 4 Resumen sobre las Principales Propiedades Físicas de los Sustratos
Su
str
ato
Tam
añ
o d
e
gra
no
mm
.
Den
sid
ad
ap
are
nte
; kg
/m³
Po
rosid
ad
To
tal;
% v
ol.
Cap
acid
ad
de A
ire
Ag
ua F
ácil
men
te D
isp
on
ible
AF
D %
vo
l.
Ag
ua d
e R
ese
rva;
AR
; %
vo
l.
Ag
ua D
ifíc
ilm
en
te D
isp
on
ible
;
AD
D;
% v
ol.
Cap
ila
rid
ad
Arena de Rio
0.5 - 2.0
1.4 -1.60
38-42 5-20 15-35 1-2 0.1-0.5 Buena
Arena de Peña
0.2 - 0.5
1.5 - 2.0
25-35 1-15 10-20 2-5 0.1-0.5 Buena
Grava 5 -15 1.6 - 2.0
40 36 2 1 0.1-0.5 Mala
Piedra Pómez
5 -10 0.6 - 0.8
75 40-55 20-40 5-8 2-5 Buena
Ladrillo 10 0.8 - 1.0
60 20-25 15-30 5-10 1-5 Buena
Arcilla Expandida
4 - 10 0.32-0.70
72-88 47-63 2-5 5-12 10-20 Regular
Perlita 0.1 - 5 0.05 - 0.14
85-95 18 - 60 6-38 2-10 18 -30 Buena
Escoria de Carbón
10 0.8 60-80 40-60 20-30 5-10 2-5 Buena
Carbón Coke
10 - 25 0.6 60-80 50-60 15-25 2-5 1-2 Mala
Carbón de 5 - 10 0.5 65-80 50-60 12-30 5-15 2-5 Mala

46
Leña
Turba 1-2 0.08 90-95 15-40 18-28 6-8 24-53 Buena
Aserrín 4 - 6 0.3 75-90 10-20 20-30 5-10 2-5 Mala
Cortezas de Pino
1-5 0.27 81 38 10-20 5-10 1-5 Mala
Cascarilla de Arroz Cruda
3 - 6 0.12 85-95 40-60 5-15 1-5 0.5 Mala
Cascarilla de Arroz
Quemada
1-4 0.17 80-90 35-55 10-20 5-10 1-2 Regular
Cascarilla de Café
5 - 8 0.15 70-80 40-50 20-30 5-10 2-5 Mala
Cáscara de Coco
0.2-3 0.08-0.12
82-92 30-50 20-30 2-6 1-5 Buena
Picón o Pomina
1-8 0.9 65 52 3.6 0.7 10.5 Mala
Lana de Roca
Bloques .07-0.1 92-95 30 50 10 5 Buena
Espuma Fenólica
Bloques .015 95-97 0-6 50-75 5-10 1-5 Buena
Fuente: Los Sustratos para Hidroponia. (2001).
Propiedades Químicas
La única propiedad química que deben poseer los sustratos es la
reactividad, es decir, la capacidad de poder transferir materia entre el
sustrato y la solución nutritiva que alimenta a la planta. Esta reactividad debe
ser recíproca y según Infoagro, lo puede ser debido a diferentes reacciones:
“Reacciones químicas, que se refiere a la disolución e hidrólisis de los
propios sustratos; reacciones físico-químicas, que se refiere al intercambio
de iones, que se dan en sustratos de origen orgánico o los de origen

47
arcilloso; y por último reacciones bioquímicas, que se refieren a la
biodegradación de los materiales del sustrato.”. (2005, p.2).
Propiedades Biológicas
La actividad biológica de los sustratos puede ser perjudicial, ya que los
microorganismos compiten con las raíces de las plantas por oxígeno y
nutrientes, causando la degradación del sustrato y disminuyendo su
capacidad de aireación, por lo que todo sustrato, debe tener las siguientes
propiedades biológicas:
Velocidad de Descomposición: Esto depende de las condiciones
ambientales en las que se encuentre el sustrato y de su origen. La
descomposición de un sustrato debe ser sumamente lenta, para evitar
deficiencias de oxígeno y nitrógeno, la liberación de sustancias
fitotóxicas, y la contracción del sustrato. Esta velocidad está
determinada por la disponibilidad de compuestos biodegradables.
Efectos de los Productos de Descomposición: Según Infoagro:
“Muchos de los efectos biológicos de los sustratos orgánicos se
atribuyen a los ácidos húmicos y fúlvicos, que son los productos
finales de la degradación biológica de la lignina y la hemicelulosa. Una
gran variedad de funciones vegetales se ven afectadas por su acción.”
(2005, p.2). Por lo que es importante, evitar la producción de humus
proveniente de la materia en descomposición.

48
Una vez vistas las propiedades que debe tener un sustrato, se puede
pasar a los tipos de sustratos. Los criterios de clasificación para estos, se
basan, en el origen de los materiales, su naturaleza, sus propiedades y su
capacidad de degradación.
Tipos de Sustratos
Los sustratos pueden clasificarse de dos maneras, la primera es
según sus propiedades, la cual se subdivide en dos (2), sustratos
químicamente inertes y sustratos químicamente activos; y la segunda es
según el origen de sus materiales, que pueden ser de origen orgánico o de
origen inorgánico.
Sustratos Químicamente Inertes: Son capaces de brindar soporte a
las plantas, pero no intervienen en el proceso de desarrollo de la
misma. Este tipo de sustrato no está en la capacidad de fijar los
nutrientes, por lo que tienen que ser suministrados a través de
fertilizantes.
Sustratos Químicamente Activos: Estos al contrario de los
anteriores, no solo son capaces de dar soporte a la planta, sino que
también están en la capacidad de brindar una reserva de los
nutrientes aportados por los fertilizantes, almacenándolos o
cediéndoles, según el requerimiento de la planta.

49
Sustratos de Materiales Orgánicos: Estos pueden ser de origen
natural, que se caracterizan por estar sometidos a la descomposición
biológica; o de síntesis, que son polímeros no biodegradables y son
obtenidos mediante síntesis química. También están los sustratos
creados con residuos de actividades agrícolas, industriales y urbanas,
pero los productos de este tipo deben pasar por un proceso de
compostaje.
Sustratos de Materiales Inorgánicos: Estos al igual que el anterior,
pueden ser de origen natural, que son aquellos que se obtienen de
rocas o minerales, pero que tienen modificaciones mediante
tratamientos físicos sencillos; también se encuentran los
transformados, que sufren cambios a través de tratamientos físicos
moderados; y por último estas los desarrollados a través de residuos
industriales.
Una vez desarrollado este punto, se procederá a describir y desarrollar
algunos de los sustratos más utilizados, los cuales entran en las categorías
anteriores, como por ejemplo, sustratos inertes, activos, orgánicos e
inorgánicos.
Sustratos típicos y Mezclas
Gravas: Este sustrato (ver Figura n° 27), está en la categoría de
sustratos de materiales inorgánicos e inertes y según Infoagro:

50
“Suelen utilizarse las que poseen un diámetro entre 5 mm y 15 mm.
Destacan las gravas de cuarzo, la piedra pómez y las que contienen
menos del 10% en carbonato cálcico. Su densidad aparente es de
1500-1800 Kg/m3. Poseen una buena estabilidad estructural, su
capacidad de retención de agua es baja, si bien su porosidad es
elevada.” (2005, p.2). Este material como sustrato es duradero por
varios años, pero algunos tipos de grava, debe lavarse antes de
usarse.
Figura n° 27 Algunos Tipos de Gravas
Fuente: Materiales para sus Acabados, Recubrimientos y Jardinería. (2007).
Arenas: Este tipo de sustrato pertenece a la categoría de sustratos
inertes e inorgánicos. Las arenas de río funcionan muy bien como
sustratos, ya que su granulometría entre 0,5 y 2 mm, tiene una
densidad aparente muy parecida a la de la grava. La desventaja es
que tiene una capacidad de retención de agua, mediana, y su
aireación va disminuyendo debido a su compactación.

51
Turbas: La turba es un material de origen vegetal, por lo que
pertenece a la categoría de sustratos activos y de materiales
orgánicos. Sus propiedades físicas y químicas varían según su origen.
Y se pueden clasificar en dos grupos, turbas negras, que tienen un
menor contenido de materia orgánica y están más mineralizadas; y
turbas rubias, que están menos descompuestas y tienen mayor
materia orgánica; aunque también se suele trabajar con una mezcla
de ambas (ver Figura n° 28). Para sus características físico-químicas
se presenta la siguiente tabla (ver Tabla n° 5).
Figura n° 28 Tipos de Turbas
Fuente: Turba Patagonia: Tipos de Turba. (2008).
Tabla n° 5 Propiedades Físico-Químicas de las Turbas
Propiedades Turbas rubias Turbas negras
Densidad aparente (gr/cm3) 0,06 - 0,1 0,3 - 0,5
Densidad real (gr/cm3) 1,35 1,65 - 1,85
Espacio poroso (%) 94 o más 80 - 84
Capacidad de absorción de agua (gr/100 gr m.s.) 1.049 287
Aire (% volumen) 29 7,6

52
Agua fácilmente disponible (% volumen) 33,5 24
Agua de reserva (% volumen) 6,5 4,7
Agua difícilmente disponible (% volumen) 25,3 47,7
C.I.C. (meq/100 gr) 110 - 130 250 o más
Fuente: Tipos de Sustratos de Cultivo. (2005).
Mezclas: Una de las alternativas más consideradas para trabajar con
sustratos, es realizar la mezcla de varios, en diferentes proporciones.
Entre los mejores mezcladores, se encuentran la arena y la piedra
pómez, ya que garantizan una buena distribución de la humedad. En
la siguiente tabla (ver Tabla n° 6), se muestran las mezclas más
usadas y en que porciones.
Tabla n° 6 Mezclas más Usadas
Cascarilla de arroz
1 Escoria 1
Cascarilla de arroz
1 Arena 1
Cascarilla de arroz
4 Tierra 1
Aserrín 1 Escoria 1
Pómez 1 Aserrín 1
Cascarilla 1 Aserrín 1 Escoria 1
Aserrín 1 Carbón 1
Cascarilla 1 Arena 2
Fuente: Tipos de Sustratos de Cultivo. (2005).

53
2.2.1.6 Solución Nutritiva
Los nutrientes requeridos por una planta, en el cultivo hidropónico,
para la producción de raíces, bulbos, tallos, hojas, flores y semillas, son
suministrados a través de una solución nutritiva.
En los cultivos hidropónicos todos los elementos esenciales se suministran a las plantas disolviendo las sales fertilizantes en agua para preparar la solución de nutrientes. La elección de las sales que deberán ser usadas depende de un elevado número de factores. Entre ellos está la proporción relativa de iones que debemos añadir a la composición, esta se comparará con la necesaria en la formulación del nutriente. Otro factor, es la solubilidad, las sales fertilizantes deben tener una alta solubilidad, puesto que deben permanecer en la solución para ser tomadas por las plantas. (Llanos, P. 2001, p.15).
Hay dieciséis (16) elementos químicos que se consideran esenciales
para las plantas, de los cuales trece (13) son nutrientes minerales, estos
nutrientes entran a las plantas a través de sus raíces y en el caso de que
falte alguno de ellos, se puede limitar o disminuir los rendimientos de las
plantas. Estos nutrientes de clasifican en dos (2), macronutrientes, que son
aquellos nutrientes que se necesitan en grandes cantidades, y
micronutrientes, que son los nutrientes que se necesitan en pequeñas
cantidades.
Macronutrientes
Los nutrientes que las plantas necesitan en gran cantidad, son
aquellos provenientes del aire y del agua, como carbono (C), hidrógeno (H) y

54
oxígeno (O), que en conjunto con el nitrógeno (N), fosforo (P) y azufre (S),
pueden producir las proteínas que necesita la planta. A su vez se necesita
de calcio (CA), magnesio (Mg) y potasio (K), ya que forman parte de la
estructura celular de la planta, así como de sus reacciones bioquímicas y
metabólicas.
Micronutrientes
Estos nutrientes también son indispensables para las plantas, solo
que se aplican en pequeñas cantidades. Entre ellos tenemos el cobre (Cu),
cuya importancia se aprecia en la asimilación de la planta; el boro (B), que
mejora el rendimiento y la calidad de la cosecha; el hierro (Fe), ligado a la
biosíntesis de la clorofila; el manganeso (Mn), que acelera la germinación y
la maduración; el zinc (Zn), necesario para la formación de la clorofila y para
el crecimiento de la planta; el Molibdeno (Mo), esencial para la fijación del
nitrógeno (N); y por último, pero no menos importante, está el cloro (Cl).
Una de las soluciones nutritivas más utilizadas, son las soluciones
modificadas de Hoagland, y según Llanos, P: “Hoagland y Arnon (1950)
formularon dos soluciones nutritivas las cuales han sido ampliamente
utilizadas y el termino “Solución de Hoagland” proviene de los laboratorios
caseros del mundo, dedicados a la nutrición de las plantas a nivel mundial.”
(2001). La primera solución contiene iones de amonio, mientras que la
segunda fue modificada por Jhonson, variando la composición de
micronutrientes (ver Tabla n° 7).

55
Tabla n° 7 Soluciones Modificadas de Hoagland
Macronutrientes
Compuesto Peso molecular gr / litro Vol. en cm3/litro Elemento
Conc. final en ppm
KNO3 101.1 101.1 6 N 224
Ca( NO3 )2.4H2O
236.16 236.16 4 K 235
NH4H2PO4 115.08 115.08 2 Ca 160
MgSO4.7H2O 246.49 246.49 1 P 62
S 32
Mg 24
Micronutrientes
Compuesto Peso molecular gr/litro Vol. en cm3/litro Elemento
Conc. final en ppm
KCl 74.55 3.728 Cl 1.77
H3BO3 61.84 1.546 B 0.27
MnSO4.H2O 169.01 0.338 1 Mn 0.11
ZnSO4.7H2O 287.55 0.575 Zn 0.131
CuSO4.5H2O 249.71 0.125 Cu 0.032
H2MoO4 ( 85% MoO3 )
161.97 0.081 Mo 0.05
Fe-Quelato 346.08 6.922 1 Fe 1.12
Fuente: Formulaciones Comerciales, Fórmulas Completas. (2001).
A raíz de esta solución se han creado una gran variedad de soluciones
nutritivas, creadas a partir de sales simples o abonos corrientes. Las hay
concentradas, para ser diluidas o ya diluidas en agua, todo depende de la
practicidad y funcionalidad, que requiera el dueño del cultivo y la plantación.

56
2.2.2 Sistemas de Control
Se entiende por sistema de control a un sistema que por medio de la
modificación de ciertas variables de entrada, se obtienen determinadas
salidas (ver Figura n° 29).
Un sistema de control es un tipo de sistema que se caracteriza por la presencia de una serie de elementos que permiten influir en el funcionamiento del sistema. La finalidad de un sistema de control, es conseguir mediante la manipulación de variables de control un dominio sobre las variables de salida, de modo que estas alcancen unos valores prefijados. (Según Sanz, A y Font, O. 2010, p.5).
Estas variables de entrada se dividen en dos grupos, el primero, son la
variables de control, que son aquellas que serán manipuladas; y el segundo,
son las perturbaciones, que son aquellas acciones sobre las que no hay
ningún tipo de control.
Figura n° 29 Esquema General de un Sistema de Control
Fuente: Sistema de Control Basado en Microcontrolador. (2010).

57
Para poder manejar un sistema de control, se necesita de una
estrategia de control, la cual hace referencia a la naturaleza y dirección de
los lazos que existen entre las variables medidas y las variables de control.
Debido a esto, existen dos estrategias de control, en función de la
información utilizada para calcular la acción de control. Estas son:
2.2.2.1 Estrategias de Control
Lazo Abierto
Es cuando la acción de control se calcula, en conocimiento de la
dinámica del sistema (ver Figura n° 30).
Esta estrategia de control es capaz de compensar los retrasos
inherentes del sistema, anticipándose a las necesidades del usuario. Sin
embargo, este tipo de lazo, suele ser insuficiente, debido a los errores del
modelo y a los errores en la estimación de las perturbaciones.
Lazo Cerrado
La acción de control es calculada en función del error medido, entre
las variables controladas y las variables de salida (ver Figura n° 30). Este tipo
de estrategia es aplicable sea cual sea la variable controlada. En la
actualidad, esta es la estrategia más utilizada.

58
Figura n° 30 Control Lazo Cerrado vs Control Lazo Abierto
Fuente: Sistema de Control Basado en Microcontrolador. (2010).
Un sistema de control ideal, está compuesto por tres elementos
básicos; los sensores, que permiten conocer los valores de las variables
medidas; el controlador, que es el que calcula la acción que debe ser
aplicada para modificar las variables de control, mediante los valores
obtenidos con los sensores; y por último los actuadores, que son los que
ejecutan la acción calculada.
2.2.2.2 Sensores
Se considera sensor a cualquier dispositivo capaz de detectar
magnitudes físicas o químicas y transformarlas en variables eléctricas, estas
variables pueden ser temperatura, intensidad lumínica, distancia,
aceleración, inclinación, nivel de agua, entre otras. Según Pallás, R: “Dado
que hay seis tipos de señales: mecánicas, térmicas, magnéticas, eléctricas,
ópticas y químicas, cualquier dispositivo que convierta una señal de un tipo

59
en una señal de otro tipo, debería considerarse un transductor o sensor y la
señal de salida podría ser de cualquier forma física útil.”. (2004).
Un sensor cuenta con muchas características, dentro de las cuales se
encuentran: el rango de medida, que es la magnitud medida en la que puede
aplicarse el sensor; la presión, que es el error máximo esperado; la
sensibilidad, que es la variación que hay entre la magnitud de entrada y la
magnitud de salida; la repetitividad, que es el error cometido varias veces en
la misma medida; entre otras características, como por ejemplo, la linealidad,
la resolución y la rapidez de respuesta.
El primer sensor fue desarrollado por Honeywell en el año 1969 y
usaba resistencias y capacitores integrados, conectados a un inversor para
crear una salida en frecuencia proporcional a la presión. A partir de esto, y
con el paso de los años y el avance tecnológico, se fueron creando y
diseñando sensores con la capacidad de medir casi cualquier variable, por lo
cual lo dividieron en dos grandes grupos, sensores analógicos y sensores
digitales.
Sensores Analógicos
Según Andrés, G: “Un sensor analógico es aquel que puede entregar
una salida variable dentro de un determinado rango (ver Figura n° 31). Un
sensor analógico, como por ejemplo, una fotorresistencia, puede ser
cableado en un circuito que pueda interpretar sus variaciones y entregar una
salida variable con valores entre 0 y 5V.”. (2004).

60
Figura n° 31 Sensor Analógico
Fuente: Sensores en Robótica. (2004).
Dentro de los sensores analógicos, se encuentran una gran variedad,
como por ejemplo, de aceleración, de nivel, de presión, entre otros; pero los
más utilizados y los más sencillos, son los potenciómetros y las
fotorresistencias.
Fotorresistencias: Estos son sensores (ver Figura n° 32), con la
capacidad de variar su valor, según el cambio en la intensidad de la
luz reflejada sobre ellos. Mientras haya más luz, la resistencia será
menor, y mientras haya poca luz o no haya, la resistencia será mayor
o estará en su valor máximo.
Figura n° 32 Fotorresistencia o LDR
Fuente: Automatización Industrial. (2003).

61
Potenciómetro: Es un sensor (ver Figura n° 33) cuyo valor de la
resistencia es variable, de esta manera se puede controlar la
intensidad de corriente o la diferencia de potencial que fluye a través
de un circuito, según como se conecte, es decir, en paralelo o en
serie.
Figura n° 33 Potenciómetro
Fuente: Automatización Industrial. (2003).
Sensores Digitales
Según Andrés, G: “Un sensor digital es aquel que entrega una salida
de tipo discreta (ver Figura n° 36). Es decir que el sensor posee una salida
que varía dentro de un determinado rango de valores, pero a diferencia de
los sensores analógicos, esta señal varía de a pequeños pasos pre-
establecidos.

62
Figura n° 34 Sensor Digital
Fuente: Sensores en Robótica. (2004).
Uno de los sensores más básicos con los pulsadores, capaces de
emitir dos (2) valores, que son abierto o cerrado. Sin embargo otros sensores
son capaces de entregar una salida de tipo binario. Existen al igual que
sensores analógicos, una gran variedad de sensores digitales, todos con una
conexión parecida, es decir, que hacen uso de una resistencia pull-up
conectada a VCC para mantener la entrada forzada en un nivel alto, de modo
que cuando el sensor se active, exija pasar la entrada a un nivel bajo. Entre
los más usados estos tenemos:
Switch: Es un sensor con la capacidad de permitir o no, el paso de
una señal. Sus aplicaciones van desde las más sencillas, como
encender y apagar las luces del hogar, hasta las más complejas
controladas por un computador. Su expresión interna más sencilla,
consiste en dos contactos de metal que pueden ser normalmente
abiertos o normalmente cerrados (ver Figura n° 35), y dependiendo de
esta configuración permiten el paso de dicha señal; mientras que su
expresión externa, puede variar desde pulsadores (ver Figura n° 36),
hasta cualquier cantidad de interruptores (ver Figura n° 37).

63
Figura n° 35 Contacto Normalmente Abierto y Contacto Normalmente Cerrado
Fuente: Autor
Figura n° 36 Pulsadores
Fuente: Automatización Industrial. (2003).
Figura n° 37 Interruptores
Fuente: Automatización Industrial. (2003).
Microswitch: Este es un sensor activado mediante la fuerza física, y
consiste en empujar una placa metálica, que activa un pulsador, el
cual cerrará el contacto y pasará la señal (ver Figura n° 38). Este

64
sensor es de gran utilidad y se ve cotidianamente en el hogar, en
cosas tan sencillas como el cerrado de una puerta de microondas.
Figura n° 38 Microswitch
Fuente: Sensores en Robótica. (2004).
Relés: Un relé es un dispositivo de procesamiento digital de señales,
este funciona como un interruptor controlado por un circuito eléctrico,
que por medio de un electro imán y una bobina, acciona uno o más
contactos para activar o desactivar un circuito independiente. Existen
tres tipos principales de relés, analógicos, que comparan una señal de
entrada con una señal de referencia; digitales, donde se convierte la
señal de entrada en una onda cuadrada, para evaluarla con una señal
de referencia comparando los ángulos de fase; y por último los relés
numéricos, que por medio de un multiplexor envía la señal de entrada
a un conversor análogo digital, para convertir la señal analógica en un
valor numérico.

65
2.2.2.3 Controladores
Un Controlador o controlador lógico es un sistema de software que
permite la interacción adecuada entre un sistema operativo o programa, con
dispositivos de hardware, es decir, que funciona como traductor entre el
dispositivo y la aplicación que lo usa. Según Creative Commons: “El
controlador es un programa informático que permite al sistema operativo
interactuar con un periférico, haciendo una abstracción del hardware y
proporcionando una interfaz para usarlo.”. (2011).
Los controladores lógicos se clasifican en dos grandes grupos (ver
Diagrama n° 1), los que tienen unidad operativa y los que no la tienen; en la
primera gama se encuentran los controladores combinacionales y los
secuenciales, y en la segunda gama se encuentran los que tienen unidad
lógica y los basados en procesadores.
Diagrama n° 1 Clasificación de los Controladores Lógicos
Fuente: Autor
Controladores Lógicos
Sin Unidad Operativa
Combinacioneles
Cableados
Programables
Secuenciales
Asíncronos
Síncronos
Cableados
Programables
Arquitectura Fija
Arquitectura Configurable
Con Unidad Operativa
Con Unidad Lógica
Basados en Procesador
Autómatas Programables
Microcontroladores
Ordenadores Industriales

66
Para efectos de este trabajo de grado, se tomaran en cuenta, solos los
autómatas programables y los microcontroladores, los cuales serán
desarrollados a continuación.
Controladores Lógicos Programables “PLC”
Un PLC es un equipo electrónico programable en lenguaje no
informático adaptado a las necesidades de la industria, diseñado para
controlar procesos secuenciales en tiempo real. Este controlador tiene como
funciones básicas, la detección, que consiste en la lectura de la señal
distribuida por el sistema; el mando, que reside en elaborar y enviar las
acciones al sistema; y por último la programación, que consiste en introducir
en determinado lenguaje, el proceso que se desea que realice el controlador.
Funcionamiento de un PLC: Según Zubía, I: “Los autómatas
programables, ejecutan correlativamente las instrucciones indicadas
en el programa de usuario almacenado en su memoria, generando
unas ordenes o señales de mando a partir de las señales de entrada
leías, al detectarse, los cambios en las señales, el autómata reacciona
según el programa hasta obtener las ordenes de salida necesarias.”.
(2001). Basándose en esto, se puede decir, que la secuencia general
del autómata programable se puede dividir en tres fases principales
(ver Diagrama n° 2), lectura de las señales de entradas,
procesamiento del programa y escritura de las señales de salida.

67
Diagrama n° 2 Funcionamiento de un PLC
Fuente: Autor
Estructura Externa de un PLC: La estructura externa de un PLC, se
refiere al aspecto físico exterior de este. En la actualidad existen tres
estructuras en el mercado; la estructura compacta (ver Figura n° 39),
la cual se distingue por presentar en un solo bloque, todos los
elementos del PLC, esta estructura tiene potencia limitada, por lo que
se usa principalmente para procesos pequeños; la estructura
semimodular, que se caracteriza por separar las entradas y salidas del
resto de los elementos del PLC y se usa para procesos medianos; y
por último la estructura modular, donde todos y cada uno de los
elementos del PLC se encuentran por separado, esta estructura es
usada para procesos grandes.
Procesamiento del Programa
Escritura de las Señales de Salida
Lectura de las Señales de
Entrada

68
Figura n° 39 PLC de Estructura Compacta
Fuente: Siemens. (2002).
Estructura Interna de un PLC: La estructura interna de un PLC está
conformada por cinco (5) partes esenciales. La primera y más
importante, es el CPU (Unidad de Procesamiento Central), es el
encargado de interpretar las instrucciones del programa de usuario y
consulta el estado de las entradas. El CPU está constituido a su vez
por tres partes, el procesador de memoria, el monitor del sistema y los
circuitos auxiliares. La segunda es la fuente de alimentación, que se
encarga de proporcionar las tensiones que se necesitan para el
funcionamiento de los circuitos. La alimentación del CPU puede ser
continua de 12/24 Vcc o alterna de 110/240 Vca, dependiendo del
modelo de PLC. La tercera parte, son las interfaces, que son los
bloques de entradas y salidas, que permiten conectarse directamente
con los sensores y actuadores, existen tres grupos bien diferenciados
de interfaces, el grupo de entradas y salidas especiales, que no influye
en la variables de estado del proceso de automatización; el grupo de
entrada y salidas inteligentes, que admiten múltiples modos de
configuración; y el grupo de periféricos inteligentes, que son módulos

69
que tienen procesador propio, memoria y puntos auxiliares de entrada
y salida. La cuarta parte de un CPU, es la unidad de programación,
que son los medios de software y hardware mediante los cuales se
introduce la secuencia de instrucciones que constituyen el programa a
ejecutar. Y por quinto y último, se encuentra la memoria, que es donde
el PLC guarda todo lo que necesite para ejecutar el programa de
control, como los datos de proceso y los datos de control. Existen
varios tipos de memoria, entre ellas la memoria RAM, que una
memoria de lectura y escritura; la memoria ROM, que es de solo
lectura y no es reprogramable; y la EPROM que es una memoria de
solo lectura y reprogramable. El PLC tienes dos memorias, la interna y
la externa. Toda memoria interna de un PLC, está compuesta por
varias áreas (ver Figura n° 40), entre ellas, está el área interna (IR),
que es donde se encuentran los registros de entradas y salidas; está
el área especial (SR), que es donde se encuentran los relees de
señalización de funciones particulares, como los temporizadores,
diagnosis y cálculo; también se encuentra el área auxiliar (AR), que
contiene los bits de control e información de los recursos, como los
puertos, los periféricos y los casete de memorias; está el área de
enlace (LR), que se usa para el intercambio de datos; área de
retención (HR), que mantiene el estado actual del PLC en caso de
fallos; área de temporizadores y contadores (TIM/CNT), se encarga de
simular el funcionamiento de estos dispositivos; y por último está el
área de datos (DM), es la memoria de palabra (16 bits) y también es
utilizable para gestión de valores numéricos. La memoria externa o
memoria de programa (ver Figura n° 41), almacena el programa
escrito para su aplicación, este tipo de memoria son siempre de tipo
permanente RAM más batería o EPROM/EEPROM.

70
Figura n° 40 Áreas de la Memoria Interna
Fuente: Curso Básico de Autómatas Programables. (2001).
Figura n° 41 Estructura y Memorias del PLC
Fuente: Curso Básico de Autómatas Programables. (2001).

71
Lenguaje de Programación de un PLC: El controlador lógico
programable, usa un lenguaje gráfico, basado en esquemas eléctricos
de control básico. Según Hernández, C: “Es un lenguaje gráfico,
derivado de relés. Mediante símbolos representa contactos, bobinas,
etc. Su principal ventaja es que los símbolos básicos están
normalizados según el estándar IEC y son empleados por todos los
fabricantes.”. (2003). Este lenguaje está compuesto principalmente por
contactos, que son los elementos que deciden si se activa o no una
salida, son variables lógicas o binarias, que solo toman dos estados
“0” o “1”, existen contactos normalmente abiertos o normalmente
cerrados (ver Figura n° 42) y son usados para indicar una entrada en
el dispositivo; y bobinas (ver Figura n° 43), que son equivalentes a las
salidas, como por ejemplo, lámparas, bobinas de relé, entre otras;
pero también usa otros bloques especiales como los temporizadores,
contadores y operaciones aritméticas, que son funciones lógicas más
complejas y no están normalizadas, aunque guardan una gran
similitud entre fabricantes.
Figura n° 42 Contactos en Lenguaje Escalera
Fuente: Instrumentación y Comunicaciones Industriales. (2003).

72
Figura n° 43 Bobinas en Lenguaje Escalera
Fuente: Instrumentación y Comunicaciones Industriales. (2003).
Propiedades Cualitativas para Seleccionar un PLC: Para
seleccionar un PLC adecuado para el tipo de proceso que se desea
desarrollar y controlar, se deben tener en cuenta ciertas
características, como por ejemplo, la marca del dispositivo, se debe
escoger una marca reconocida, con gran experiencia en la elaboración
de PLC’s, que pueda garantizar el buen funcionamiento del
controlador lógico programable, como Siemens (ver Figura n° 44), y
Allen Bradley (ver Figura n° 45). Modelo, el modelo de PLC a
seleccionar depende de las características cuantitativas que se
necesiten y de la marca escogida. Velocidad de trabajo, dependiendo
de la velocidad de variación que requiere el proceso, se necesitará un
PLC más rápido o con módulos más rápidos. Esto quiere decir, que
para grandes programas, se requieren un tiempo de análisis más
corto, la desventaja de esto, es que mientras más corto es el tiempo
de análisis, más costoso es el controlador lógico programable.
Tensiones de alimentación disponible, si el proceso requiere de una
alimentación específica, el PLC debe poseer varias entradas de
alimentación, para conectar las diferentes tensiones ajustadas y así
poder satisfacer los requerimientos del proceso que se desea
automatizar. Normalmente los PLC trabajan con una alimentación de
5V para las tarjetas, 5.2V para el programador y 24V para los canales

73
de lazo de corriente continua, por lo que cada entrada de alimentación
debe ser convertida a este voltaje. Capacidad de ampliación, el
proyecto tiene una cantidad de entradas y salidas determinadas, pero
siempre está la posibilidad de un cambio, bien sea para agregar o
para quitar entradas y salidas, por esta razón el PLC debe ser capaz
de ampliarse con una cantidad de módulos determinada. Capacidad
de comunicación, consiste en que el PLC sea capaz de comunicarse
con otros controladores en serie y en red, según la necesidad del
proceso, también debe incluir los drivers necesarios para realizar la
conexión. Software, el PLC debe incluir dos software, el primero es el
de programación, para poder realizar el proceso en la computadora y
el segundo es el especializado en el funcionamiento del controlador
lógico programable. Hay que verificar esto, ya que muchos
distribuidores lo venden por separado y a precios muy altos. Respaldo
de la Compañía, la compañía debe garantizar el buen funcionamiento
del PLC, para en caso de falla y mal funcionamiento poder tener la
posibilidad de cambiarlo o que lo reparen, así como ofrecer los
servicios de arreglo y repuestos. Manuales, cada PLC debe traer
consigo un manual de funcionamiento y un manual de programación,
estos deben estar escritos en varios idiomas, pero principalmente en
el idioma de la localidad donde se compró.
Figura n° 44 Logo Siemens
Fuente: Marcas. (2010).

74
Figura n° 45 Logo Allen Bradley
Fuente: Marcas. (2010).
Propiedades Cuantitativas para Seleccionar un PLC: Al igual que
hay que tomar en cuenta los criterios cualitativos para seleccionar un
PLC, existen algunos criterios cuantitativos, como por ejemplo, los
números de entradas y salidas, la cantidad de entradas y salidas que
tenga el controlador lógico programable, debe satisfacer la cantidad de
entradas y salidas requeridas para completar el proceso que se desea
automatizar. Puede ser que tenga la misma cantidad de entradas y
salidas necesarias, o que tenga más de ellas, o capacidad para
ampliación. Capacidad de memoria, la memoria interna del PLC, debe
tener la capacidad necesaria requerida, para el almacenamiento del
proceso completo, es decir desde su comienzo hasta su final, sin
embargo, puede tener capacidad para la ampliación de un módulo de
memoria. Cantidad de programas manejables y ejecutables, Eso
también depende de la memoria del dispositivo, pero este debe ser
capaz de manejar varios programas independientes, que se necesiten
para el proceso, también debe poder manejar estos programas al
mismo tiempo si así lo requiere el proceso. Cantidad de extras, los
extras son los temporizadores, contadores, banderas y registros que
contiene internamente el PLC. Dependiendo de qué cantidad de cada
uno se necesite, se seleccionará el PLC correcto.

75
Microcontroladores
Un microcontrolador es un dispositivo electrónico, en cuyo interior se
encuentran las mismas unidades centrales que posee una computadora, que
son el CPU, la memoria y los periféricos de entradas y salidas. Existen una
gran variedad de microcontroladores, como por ejemplo, ATMEL, con
instrucciones de 8 y 32 bits; Intel, con instrucciones de 16 bits; pero para
efectos de este trabajo de grado, se hablará Microchip, específicamente de
microcontroladores PIC, que según Creative Commons: “son una familia de
microcontroladores tipo RISC fabricados por Microchip Technology Inc. y
derivados del PIC 1650, originalmente desarrollado por la división de
microelectrónica de General Instrument.”. (2011). Este dispositivo fue
desarrollado originalmente para trabajar con la CPU de 16 bits llamada
CP16000, pero tenía malas prestaciones de entradas y salidas, así que se
desarrolló el PIC de 8 bits, lo que mejoró el rendimiento del sistema, ya que
se le quitó al CPU el peso de las entradas y salidas.
Arquitectura Harvard: Esta es la arquitectura usada por lo
microcontroladores PIC, y consiste en que el CPU está conectado a
dos (2) memorias por intermedio de dos (2) buses separados (ver
Figura n° 46). Una de las memorias, es la memoria de programa y es
la que contiene las instrucciones del programa, y la otra es la memoria
de datos, que contiene los datos del programa. Como los buses son
independientes, se puede acceder a los datos para completar una
instrucción y a su vez se puede leer la próxima instrucción a ejecutar.
Este tipo de arquitectura usa microprocesadores RISC, los cuales
poseen instrucciones de tamaño fijo, las cuales son presentadas en un
reducido número de formatos, y solo las instrucciones de carga y

76
almacenamiento acceden a la memoria de datos. Los
microcontroladores PIC 16C5X, 16CXX y 17CXX poseen esta
arquitectura Harvard con una memoria de datos de 8 bits, pero la
memoria de programa, depende del modelo del microcontrolador PIC,
por ejemplo, para el PIC 16C5X, la memoria de programa es de 12
bits, para el PIC 16CXX la memoria es de 14 bits y para el PIC 17CXX
es de 16 bits.
Figura n° 46 Arquitectura Harvard
Fuente: Manual de Microcontroladores PIC. (2005).
Memoria de Datos: Esta memoria está dividida en dos grupos (ver
Figura n° 47), el primer grupo es donde están los registros especiales
y el segundo grupo es donde están los registros generales. El primer
grupo ocupa once (11) posiciones, que van desde 00 a 0B, y
contienen, la palabra de estado, los registros de datos de los puertos
de entrada A, B y C, los 8 bits menos significativos del PC, el contador
de tiempo real (RTCC), y un registro puntero llamado File Select
Register (FSR); y el segundo grupo ocupa desde la posición 08 hasta
la 1F, y se dividen en dos grupos, los registros de posición fija, que
ocupan las primeras ocho (8) posiciones de los registros generales, es
decir, de 08 a 0F; y los bancos de registro, que consiste en bancos de

77
16 registros cada uno, que se encuentran superpuestos en las
direcciones 10 a 1F.
Figura n° 47 Organización de la Memoria de Datos
Fuente: Manual de Microcontroladores PIC. (2005).
Memoria de Programa: Está compuesta por secciones o página de
512 posiciones (ver Figura n° 48), las cuales están divididas en dos
partes de 128 posiciones, debido a las limitaciones de
direccionamiento de las instrucciones de salto.
Figura n° 48 Organización de Memoria de Programa
Fuente: Manual de Microcontroladores PIC. (2005).

78
Programa Fuente: Está compuesto por una sucesión de líneas de
programas, compuestas por cuatro (4) campos separados por uno o
más espacios, estos espacios son etiqueta, comando, operando y
comentario. La etiqueta se encarga de identificar la línea del
programa, haciendo que el compilador le asigne un valor
automáticamente; el comando puede ser un código mnemónico, el
cual será traducido a código máquina; o una pseudoinstrucción para el
compilador, que realizará alguna acción en el tiempo de compilación;
los operando puede contener varios parámetros separados por comas
(,), pueden ser números o literales, y dependen de las instrucciones o
directivas; por último el campo de los comentarios, estos deben estar
precedidos por un punto y coma (;), son solo para observaciones del
programador, y son ignorados por el compilador.
Conjunto de Instrucciones: Este consiste en un repertorio de 33
instrucciones de 12 bits (ver Figura n° 49), que pueden ser agrupadas
en tres (3) o cinco (5) grupos, estando en primer lugar las
instrucciones que operan con bytes y que involucran registros de la
memoria interna; en segundo lugar están las instrucciones que
trabajan en el registro W y que permiten cargar una constante implícita
o incluida literalmente en la instrucción; en tercer lugar están las
instrucciones que operan sobre bits individuales de la memoria
interna; en cuarto lugar están las instrucciones de control de flujo del
programa; y por último están las funciones especiales.

79
Figura n° 49 Resumen del Conjunto de Instrucciones
Fuente: Manual de Microcontroladores PIC. (2005).
Lenguaje de Programación de un Microcontrolador PIC: Los
microcontroladores PIC, pueden ser programados en lenguaje
ensamblador (assembler) o lenguaje compilador (C). El primero es un
lenguaje de programación de bajo nivel, y se usa en computadores,
microprocesadores y microcontroladores. Según Frino, L: “La
programación en este lenguaje puede resultar ardua para un
principiante, pero permite desarrollar programas muy eficientes, ya
que otorga al programador el dominio absoluto del sistema.”. (2004).
Esta programación se basa en una representación simbólica de los
códigos de máquina binarios y otras constantes que son de gran
utilidad para programar una arquitectura dada de CPU. Este lenguaje
está compuesto por tres grupos de instrucciones, el primero son las
instrucciones de operación sobre datos, el segundo grupo son las
instrucciones lógicas y aritméticas, y por último están las instrucciones

80
para control de procesos. El lenguaje compilador, es un sistema de
programación de nivel alto, y según Frino, L: “Permite disminuir el
tiempo de desarrollo de un producto. No obstante, si no se programa
con cuidado, el código resultante puede ser mucho más ineficiente
que el programado en lenguaje ensamblador.”. (2004).
Propiedades Cualitativas para Seleccionar un PIC: Para
seleccionar un microcontrolador PIC, se requiere de ciertas
característica cualitativas, como por ejemplo, el tipo de memoria, las
cuales pueden ser ROM, PROM y EPROM; la cantidad de periféricos,
puertos de entrada y salida, temporizadores, contadores, conversor
análogo-digital, comparadores y modulador de ancho de impulso; y el
lenguaje de programación, que según el PIC seleccionado puede ser
Assembler o C.
Propiedades Cuantitativas para Seleccionar un PIC: Para
seleccionar un microcontrolador PIC se requieren de ciertas
características, que serán estipuladas por el tipo de programa que se
desee desarrollar. Para esto, hay que tener en cuenta, por ejemplo, el
tipo de procesador, que puede ser de 4, 8, 16, y 32 bits; también hay
que tener en cuenta la cantidad de bytes que se requieren de la
memoria RAM para la realización del programa; el consumo, ya que la
alimentación puede ser vital para la activación de una salida.

81
2.2.2.4 Actuadores
Es el dispositivo que recibe la orden de un controlador y da una salida,
la cual es necesaria para activar un elemento final de control. Según
Vildósola, E: “La fuerza que provoca un actuador proviene de tres fuentes
posibles: presión neumática, presión hidráulica, y fuerza motriz eléctrica.
Dependiendo del origen de la fuerza, el actuador se denomina “neumático”,
“hidráulico” o “eléctrico”.”. (2006). Los actuadores hidráulicos son empleados
más que todo, cuando se necesita potencia, ya que requieren demasiado
equipo para el suministro de energía, entre ellos están, los cilindros
hidráulicos (ver Figura n° 50) y motores hidráulicos (ver Figura n° 51); los
actuadores neumáticos son utilizados principalmente para posicionamientos,
entre ellos se encuentran, la cremallera (ver Figura n° 52) y los rotativos de
paletas (ver Figura n° 53); y por último los actuadores eléctricos, que son los
activados con energía eléctrica, y los de interés para este trabajo de grado.
Existen una gran variedad de actuadores eléctricos, los cuales se escogen
en función de las necesidades del proyecto que se desea desarrollar y del
sistema a controlar, a continuación de describirán algunos actuadores
eléctricos.
Figura n° 50 Interior de un Cilindro Hidráulico
Fuente: Maquinaria e Instrumentación Industrial: Actuadores neumáticos, eléctricos e hidráulicos. (1998).

82
Figura n° 51 Interior de un Motor Oscilante
Fuente: Maquinaria e Instrumentación Industrial: Actuadores neumáticos, eléctricos e hidráulicos. (1998).
Figura n° 52 Cremallera
Fuente: Maquinaria e Instrumentación Industrial: Actuadores neumáticos, eléctricos e hidráulicos. (1998).
Figura n° 53 Rotativo de Paletas
Fuente: Maquinaria e Instrumentación Industrial: Actuadores neumáticos, eléctricos e hidráulicos. (1998).

83
Motores Eléctricos: Son máquinas rotatorias (ver Figura n° 54), que
se encargan de transformar energía eléctrica, en energía mecánica.
Estos dispositivos eléctricos satisfacen muchas de las necesidades
que pueda tener un sistema, como arrancar, acelerar, mover o frenar
una carga. Son ágiles con respecto a la variación de potencia y
pueden pasar instantáneamente desde una posición de reposo, a su
máxima potencia. Existen una variedad inmensa de motores
eléctricos, que varían en tamaño, desde los pequeños motores de
pecera hasta los grandes motores de locomotoras eléctricas, sin
embargo, se distinguen dos grupos, los motores monofásicos, que
contienen un juego simple de bobinas en el estator, y los motores
polifásicos, que contienen dos o más conjuntos de bobinas. Pero
también, se pueden clasificar los motores según el origen de la
corriente eléctrica, en motores de corriente continua o directa y
motores de corriente alterna, o según su funcionamiento, en motores
de inducción, que no necesita ni escobillas, ni colector; motores
síncronos, que funcionan a una velocidad síncrona fija proporcional a
la frecuencia; y motores de colector. Las partes principales de un
motor eléctrico son (ver Figura n° 55) el eje, es donde se coloca lo que
se desea poner en marcha; la armadura, que sostiene al imán; el
imán, que hace que el eje gire, cuando la corriente pasa por la bobina;
las escobillas y delga, que establecen la conexión eléctrica entre la
parte fija del motor y la giratoria; y la bobina, que es un enrollado de
alambre de cobre a través de un núcleo de hierro; el cojinete, que es
donde se soporta el eje; el rotor, que es la parte giratoria del motor; y
el estator, que es la parte fija.

84
Figura n° 54 Motor Eléctrico
Fuente: La Ciencia es Fácil: Motor Eléctrico. (2009).
Figura n° 55 Partes Internas de un Motor Eléctrico
Fuente: Como Trabaja un Motor Eléctrico. (1992).
Bombas Hidráulicas: Son máquinas generadoras, que se utilizan
para incrementar la presión de un líquido, agregando energía al
sistema hidráulico, para así poder mover el líquido de una zona a otra.
Este tipo de bombas, a diferencia de otras no modifica la densidad del
fluido. El proceso de transformación de energía se hace a través de

85
dos etapas, la primera es aspiración, que al comunicarse energía
mecánica a la bomba, esta comienza a girar, generando una
disminución de presión en la entrada de la bomba, y como el depósito
del líquido está sometido también a la presión atmosférica, se genera
una diferencia de presiones provocando la succión; y la segunda
etapa es la descarga, que es cuando entra el líquido, y la bomba lo
toma para trasladarlo a la salida. Las bombas hidráulicas se pueden
clasificar volumétricamente, que depende de la cantidad de líquido
que la bomba pueda entregar en la salida, en determinado tiempo y a
determinada velocidad y se mide en galones por minuto (gpm); o
pueden clasificarse según su presión.
Indicadores: Son instrumentos que se utilizan para indicar o mostrar
algo. Estos deben ser accesibles, es decir, fáciles de identificar y
recopilar; pertinentes, para lo que se desea medir; fieles, que los datos
que recojan sean fiables; objetivos, no ambiguos en su interpretación;
precisos, para la acción que se requiere estimar; sensibles, que
permiten recoger y estimar variaciones de aquello que son referentes.
Son elementos básicos de las técnicas de control de gestión, y pueden
clasificarse en dos grandes grupos (ver Diagrama n° 3), indicadores
de ejecución, que son los que aluden a resultados de una actividad; e
indicadores de proceso, que aluden a los procesos intermedios de la
actividad.

86
Diagrama n° 3 Clasificación de los Indicadores
Fuente: Autor
Lámparas: Son aparatos que generan luz, y deben cumplir con ciertas
características ópticas, mecánicas y eléctricas, como por ejemplo, que
generan la suficiente cantidad de luz para iluminar determinada área.
Estas se pueden accionar con diferentes combustibles, desde energía
eléctrica, hasta gases y aceites. Pueden ser de llamas o de bombillas,
Indicadores
De Ejecución
De economía N° de recursos
empleados/disponibles
De eficiencia
Valoran los recursos empleados en relación
a los resultados obtenidos
De Eficacia Comparan los
resultados obtenidos con los previstos
De efectividad Valoran el resultado
global con el previsto
De Proceso
Estrategicos Informa qué factores
externos influyen en el proceso de actividad
De estructura Valoran los recursos
disponibles y los necesarios
De proceso
Evalúan como se desarrollan las
actividades internas del proceso de gestión
De resultado Miden los resultados finales del proceso

87
y estas últimas pueden ser incandescentes (luz amarilla) (ver Figura n°
56), o fluorescentes (luz blanca) (ver Figura n° 57).
Figura n° 56 Bombillas Fluorescentes
Fuente: Horizonte Eléctrico. (2007).
Figura n° 57 Bombillas Incandescentes
Fuente: Horizonte Eléctrico. (2007).
2.3 CUADRO DE OPERACIONALIZACIÓN DE VARIABLES
Según Betancourt, S: “Una variable es operacionalizada con el fin de
convertir un concepto abstracto en uno empírico, susceptible de ser medido a
través de la aplicación de un instrumento. Dicho proceso tiene su

88
importancia, en la posibilidad de que un investigador poco experimentado
pueda tener la seguridad de no perder o cometer errores que son frecuentes
en un proceso investigativo, cuando no existe relación entre la variable y la
forma en que se decidió medirla, perdiendo así su validez.”. (1995).
Basándose en lo antes expuesto, se procedió a crear el cuadro de
operacionalización de variable (ver Tabla n° 7), del presente trabajo de
grado.
Tabla n° 8 Operacionalización de Variables
Objetivos Variables Dimensiones Indicadores Sub-
Indicadores Fuentes
Técnicas De
Recolección
Definir el método de cultivo de raíz flotante que será utilizado para la aplicación del prototipo a desarrollar
Sistema con placas de anime Sistema NFT Sistema NFT Alternativo Sistema por goteo Sistema en mangas verticales
Tipo de contenedores
Camas de agua
Investigación Documental Investigación de campo
Revisión de manuales Medición de espacios Aplicación de cuestionarios Visita a viveros de cultivos hidropónicos
Tubos PVC
Camas de sustrato
Mangas Verticales
Espacio donde se desea implementar
Exterior
Interior
Invernadero
Extensión del espacio
Metros cuadrados
(m2)
Identificar en función del método seleccionado, las plantas que serán cultivadas
Frutales Hortalizas Tubérculos Aromáticas Ornamentales
Tiempo de germinación
Días (días)
Investigación documental Investigación de campo
Revisión de manuales Cuestionarios Visita a viveros de cultivos hidropónicos
Tiempo de cosecha
Tamaña de la planta
Centímetros (cm)
Tipo de clima
Cálido
Templado

89
Determinar el tiempo de ejecución de los procesos que se desean controlar
Aireación de la solución nutritiva Movimiento de los nutrientes Incidencia de la luz artificial cosecha del cultivo
Tiempo
Minutos por hora
(m/h)
Investigación documental Investigación de campo
Revisión de manuales Cuestionarios Visita a viveros de cultivos hidropónicos
Horas por día (h/d)
Días (días)
Establecer los sensores y actuadores adecuados para cubrir las variables del método de raíz flotante que se desean controlar en el desarrollo del prototipo
Switch Pulsadores Teclado Sensores de nivel Indicadores Lámparas Bomba de aire Bombas de agua Pantalla LCD Alarma
Protección Activación Indicación Iluminación Ejecución Demostración
Potencia
Watts (W)
Investigación documental Investigación de campo
Revisión de catálogos Cotización de Productos Observación de especificaciones técnicas
Voltaje Voltios (V)
Corriente Amper (A)
Seleccionar el modelo de PLC adecuado, para controlar las variables del sistema de control propuesto
Logo! 12/24Rc Logo! 230Rc S7-200 Micro800 System
Velocidad de trabajo
Ciclos por segundo
(clicos/s)
Investigación documental Investigación de campo
Revisión de manuales Observación de catálogos Visita a proveedores
Tensiones de alimentación disponibles
Voltaje (V)
Capacidad de ampliación
Módulos
Capacidad de comunicación
Profibus Punto a punto Ethernet Multipunto
Compatibilidad de software
Windows Linux Mac

90
N° de entradas y salidas
Digitales Analógicas
Capacidad de memoria
Bytes
Cantidad de extras
Temporizadores Contadores Banderas Registro
Precio Bolívares fuertes
(Bs. F)
Elegir el modelo de microcontrolador PIC adecuado, para controla y visualizar el tiempo que requiere el cultivo para ser cosechado
Gama enana Gama baja Gama media Gama alta
Tipo de memoria
ROM PROM EPROM/EEPROM
Investigación documental Investigación de campo
Revisión de manuales Observación de catálogos Visita a proveedores
Cantidad de periféricos
Puertos E/S Temporizadores Contadores Conversor A/D Puertos de comunicación Comparadores Modulador de ancho de pulso
Tipo de lenguaje
Assembler C+
Tipo de procesador
Bits Bits
Memoria RAM Bytes Bytes
Consumo Potencia Watts (W)
Precio Bolívares fuertes
(Bs. F)
Diseñar y desarrollar el programa de control de aireado, nivel de agua, movimiento de nutrientes
Programa de control
Diseño del programa en lenguaje escalera
Entradas y salidas
Análogas
Investigación documental Investigación de campo
Revisión de manuales Análisis de simbología Consultas con tutor
Digitales
Extras
Temporizadores
Contadores
Banderas
Registros

91
y luz artificial en lenguaje escalera para el PLC elegido
Desarrollo del programa diseñado
Control de aireado
Minutos por hora (m/h)
Practicas con el programa
Control de nivel de agua
Alto
Bajo
Movimiento de nutrientes
Minutos por hora (m/h)
Incidencia de luz artificial
Horas por día (h/día)
Diseñar y desarrollar el programa de control y visualización del tiempo estimado para la cosecha del cultivo, para el microcontrolador PIC elegido
Programa de control y visualización
Diseño del programa
Tipo de instrucciones
Según el lenguaje de programación elegido
Investigación documental Investigación de campo
Revisión de manuales Análisis de instrucciones Prácticas con el programa
Entradas y salidas
Análogas
Digitales
Desarrollo del programa de control y visualización diseñados
Control del tiempo de cosecha
Días
Teclado
Visualización del tiempo transcurrido
Días
Pantalla LCD
Aviso de tiempo de cosecha finalizado
Alarma
Ejecutar el prototipo de sistema de control diseñado
Sistema de control propuesto
Evaluación de los costos, para el desarrollo del prototipo
Costos en productos agrícolas
Bolívares fuertes (Bs. F)
Investigación documental Investigación de campo
Revisión de catálogos Cotizaciones Prácticas
Costos en los contenedores
Costos en sensores y actuadores
Costos en dispositivos electrónicos
Tiempo estimado para el montaje del proyecto
Tiempo para comprar los materiales y dispositivos necesarios
Días
Tiempo para el ensamblaje del proyecto
Pruebas finales del prototipo
Aireación de la solución nutritiva
Minutos por hora (m/h)
Movimiento de nutrientes
Nivel de agua Alto
Bajo
Incidencia de luz artificial
Horas por día (h/día)
Control y visualización del tiempo estimado para la cosecha
Días
Evaluar la funcionalidad del sistema ejecutado
Funcionalidad Control de variables con PLC
Aireación de la solución
Es funcional Investigación de campo
Evaluación del prototipo
Movimiento de nutrientes
Nivel de agua
Incidencia de luz

92
Control y visualización de variables con microcontrolador PIC
Control de tiempo de cosecha
No es funcional
Visualización de tiempo de cosecha
Aviso de tiempo de cosecha finalizado
Fuente: Autor
2.4 DEFINICIÓN DE TÉRMINOS BÁSICOS
A
Ácidos Fúlvicos: Son parte del complejo de compuestos orgánicos del
suelo, de naturaleza muy particular y distinta a la de cualquier sustancia
vegetal.
Ácidos Húmicos: Son uno de los principales componentes de las sustancia
húmicas, las cuales son los constituyentes principales del humus.
Acuicultura: Es un conjunto de actividades, técnicas y conocimientos de
cultivo de especies acuáticas vegetales y animales.
Agregado Liviano: Es un agregado de baja densidad, tal como, la arcilla
expandida, la piedra pómez o la ceniza fina.
Automatización: Es el uso de sistemas o elementos computarizados para
controlar máquinas y/o procesos industriales, sustituyendo a operadores
humanos.
B
C

93
Compostaje: Es el proceso biológico aeróbico, mediante el cual los micro
organismos actúan rápidamente sobre la materia biodegradable, permitiendo
obtener composta.
D
Desalinización: Es el proceso de eliminar la sal del agua del mar,
obteniendo agua dulce.
Dragar: Es limpiar el fondo de los ríos, puertos y zonas navegables de
arena, piedras y otros materiales.
E
F
G
Glúcidos: Son moléculas orgánicas, compuestas por carbono, hidrógeno y
oxígeno.
H
Hemicelulosa: Es un polisacárido compuesto de diversos tipos de
monosacáridos, que forma parte de la membrana de las células vegetales.
Hidrólisis: Es una reacción ácido-base, entre una sustancia, típicamente
una sal, y el agua.
I

94
J
K
L
Lignina: Es un polímero presente en las paredes celulares de los
organismos del reino Plantae.
M
Mnemónico: Es una palabra que sustituye a un código de operación, con lo
cual resulta más fácil la programación, es de aquí de donde se aplica el
concepto de lenguaje ensamblador.
Monosacáridos: son los glúcidos más sencillos, que no se hidrolizan, es
decir, que no se descompone para dar otros compuestos.
N
Nutricultura: Es la ciencia que estudia los químicos que necesitan las
plantas para poder subsistir, y así poder crear soluciones nutritivas efectivas
y balanceadas.
O
P
Plántula: Es cuando la planta se encuentra en la etapa de desarrollo entre el
estado de reposo y la germinación.

95
Pseudoinstrucción: Instrucción del lenguaje ensamblador que no tiene un
reflejo en una instrucción en lenguaje máquina.
Q
R
S
T
U
V
Vermiculita: Es un mineral formado por silicatos de hierro o magnesio.
W
X
Y
Z

96
CAPÍTULO III
MARCO METODOLÓGICO
Según Balestrini, Miriam: “El marco metodológico, está referido al
momento que alude al conjunto de procedimientos lógicos, tecno-
operacionales implícitos en todo proceso de investigación, con el objeto de
ponerlos de manifiesto y sistematizarlos; a propósito de permitir descubrir y
analizar los supuestos del estudio y de reconstruir los datos, a partir de los
conceptos teóricos convencionalmente operacionalizados.”. (1998, p.125).
El enfoque metodológico, que orientó el desarrollo de este proyecto,
se centró en los siguientes aspectos:
3.1 TIPO DE INVESTIGACIÓN
Palella, Santa y Martins, Feliberto, afirman que: “El tipo de
investigación se refiere a la clase de estudio que se va a realizar. Orientada
sobre la finalidad general del estudio y sobre la manera de recoger la
información o los datos necesarios.”. (2006, p.99).
Partiendo de este punto y de los objetivos que fueron propuestos en
esta investigación; se utilizó el tipo de investigación, denominada Innovación
y Desarrollo Tecnológico, para abordar la problemática expuesta.

97
La innovación y desarrollo tecnológico, son el trabajo sistemático que se vale del conocimiento existente obtenido de la investigación y la experiencia práctica, con el propósito de producir nuevo materiales, productos o dispositivos; instalar nuevos procesos, sistemas o servicios, o de mejorar de forma sustancial aquellos ya instalados o producidos. (Organización de Cooperación y Desarrollo Económico, 1993, p.232)
El desarrollo de un prototipo de sistema de control para cultivos
hidropónicos de raíz flotante en aplicaciones de agricultura familiar urbana,
es un proyecto de innovación y desarrollo tecnológico, ya que está en la
búsqueda constante de mejorar y actualizar los conocimientos científicos y
tecnológicos de tal forma de poderlos aplicar en la actualidad.
Este trabajo de grado, se encuentra dentro de este tipo de
investigación, porque permite desde el punto de vista metodológico:
-Realizar el diagnóstico de un problema específico, capaz de
proporcionar información sobre las características necesarias para la
mejora de un ámbito, en este caso agrícola.
-Presentar una solución de carácter tecnológico que ejecute un
procedimiento que resuelva la problemática antes expuesta.
-Ser implementado en una infraestructura tecnológica que permita el
funcionamiento de este sistema de control.

98
3.2 DISEÑO DE INVESTIGACIÓN
Según Cabrero, Julio y Martínez, Miguel: “El diseño de investigación
constituye el plan general del investigador para obtener respuestas a sus
interrogantes o comprobar la hipótesis de su investigación. El diseño de
investigación desglosa las estrategias básicas que el investigador adopta
para generar información exacta e interpretable.”. (2000, p. 25).
Con bases en lo antes expuesto, se determinó que el diseño de este
proyecto es de campo, que según Arias, Fidias: “Es la combinación de la
investigación documental con la investigación de campo, utilizando la
compresión del conocimiento científico y poniendo en práctica estos
mismos.”. (1999, p.60).
La investigación de campo es la aplicada para comprender y resolver alguna situación, necesidad o problema en un contexto determinado. El investigador trabaja en el ambiente natural en el que conviven las personas y las fuentes consultadas, de las que se obtendrán los datos más relevantes a ser analizados son individuos, grupos y representantes de las organizaciones o comunidades. (Martínez, Elena, 2005, p.152).
El desarrollo de este prototipo es una investigación de campo porque
se trata de resolver una problemática determinada, obteniendo datos de las
personas afectadas en una ambiente específico, también se pone en
práctica lo aprendido en la carrera de Ingeniería Electrónica, probando que
sensores y actuadores son los que se adaptan mejor al proyecto, los
circuitos expertos que hay que utilizar, y los programas de procesamiento,
evaluando mediante ensayo y error, el óptimo funcionamiento de este

99
sistema de control. Este tipo de investigación es aplicada especialmente en
los cuatro (4) últimos objetivos específicos de este proyecto, ya que se tiene
que diseñar, desarrollar, ejecutar y controlar las variables seleccionadas
para el desarrollo de este sistema de control, mientras que en los primeros
seis (6) objetivos específicos se resolvieron, realizando una extensa
investigación teórica y analizando cada una de las partes recolectadas.
3.3 POBLACIÓN Y MUESTRA
Paella, Santa y Martins, Feliberto afirman que: “La población de una
investigación es el conjunto de unidades de las que se desea obtener
información y sobre las que se van a generar conclusiones. La población
puede ser definida como el conjunto finito o infinito de elementos, personas o
cosas pertinentes a una investigación y que generalmente suele ser
inaccesible”. (2006, p.115).
Para el desarrollo de este proyecto, se usó una población finita, ya
que los elementos en su totalidad son identificables por el investigador,
conformada por dos (2) compañías agricultoras cuyo método de siembra es
la hidroponia, en las áreas cernadas al Distrito Capital y los Altos Mirandinos.
Esta población fue escogida por la cercanía al lugar donde se desarrolla el
proyecto de grado ya que la mayoría de los cultivos hidropónicos se
encuentran en otros estados del país.
La población seleccionada está integrada por los dueños del cultivo
hidropónico, ya que son las más aptas para dar la información necesaria y
requerida acerca de su cultivo. Se usó la técnica de muestreo intencional,
que según Lagares, Paula: “Es el modelo en el que la persona que

100
selecciona la muestra es quien procura que sea representativa, dependiendo
de su intención u opinión, siendo por lo tanto la representatividad subjetiva.”.
(2001, p.20).
Debido a que la población para esta investigación es sumamente
baja, no se requiere la determinación de unidades de muestreo, ya que es
posible la recolección de información sin la necesidad de una muestra de
poblaciones infinitas.
3.4 TÉCNICAS E INSTRUMENTOS DE RECOLECCIÓN DE DATOS
Balestrini, Miriam resalta la relevancia de las técnicas e instrumentos
de recolección de datos en el proceso de investigación, cuando señala que:
“Otro importante aspecto a desarrollar en el marco metodológico del
proyecto de investigación, toda vez que se ha delimitado, el tipo de
investigación, su diseño y la población; está relacionado con la definición de
los métodos, instrumentos y técnicas de recolección de la información que
se incorpora a lo largo de todo el proceso de investigación, en función del
problema y de las interrogantes planteadas; así como, de los objetivos que
han sido definidos… Estas técnicas son diversas según el objeto al que se
apliquen y no se excluyen entre sí. Todavía es preciso, por una parte, saber
elegir la más adecuada y, por otra utilizarla convenientemente…”. (1998,
p.125).
Por las características que presenta la población seleccionada, se
escogió como instrumento de recolección de datos, el cuestionario, que
según Chávez, Dennis: “Es un método de recolección de datos, conformado
por un conjunto de preguntas escritas que el investigador administra o aplica
a las personas o unidades de análisis, a fin de obtener información empírica

101
necesaria para determinar los valores o respuestas de las variables motivo
de estudio” (2001, p. 50), y como técnica de instrumentación, se escogió la
observación estructurada, que según Arias, Fidias: “Es aquella que además
de realizarse en correspondencia con unos objetivos, utiliza una guía
diseñada previamente, en la que se especifican los elementos que serán
observados.” (2006, p.70).
La evaluación basada en normas de competencia exige algunos
requisitos a tener en cuenta en el diseño de instrumentos, entre ellos:
validez, confiabilidad y representatividad.
Se escogió la observación (ver Anexos B), porque, según Chávez
Dennis: “… tiene la ventaja de facilitar la obtención de datos lo más próximo
a como estos ocurren en realidad y es una técnica fundamental para
recolectar datos referentes al comportamiento de un fenómeno en un
“tiempo presente”.”. (2001, p.50). Basados en esto, se pudo hacer una
evaluación de la información recopilada del proceder de los sistemas
actuales de hidroponia.
Se escogió el cuestionario (ver Anexos B.1), porque con este
instrumento, se puede obtener información sustentable sobre las variables
que se desean controlar, para así poder plantear respuestas a las
interrogantes propuestas en la investigación.
3.5 PROCESAMIENTO Y ANÁLISIS DE INFORMACIÓN
Según Rojas Sean: “Una vez realizada la recogida de datos a través
de las técnicas seleccionadas, comienza una fase esencial para toda
investigación, referida a la clasificación o agrupación de los datos referentes

102
a cada variable objetivo de estudio y su presentación conjunta. El
investigador sigue un procedimiento de cuatro (4) pasos, para analizar y
procesar los datos: validación y edición, codificación, introducción de datos y
por último tabulación y análisis estadísticos.”.” (2009, p.20).
Cumpliendo con estos cuatro pasos, se hizo una validación (ver
Anexos A.3) ante un jurado competente, para verificar que el cuestionario
realizado, cumpliera con la función de recolectar la información necesaria,
para responder las interrogantes planteadas en este trabajo de grado. Luego
la información recolectada fue codificada en función de los objetivos
específicos y sus variables. Por último se analizó estadísticamente dichos
datos.
El patrón básico de análisis de información implementado, constituye
los siguientes pasos: Identificar las preguntas que se quieren responder, las
cuales están especificadas en el Capítulo I, en el subtitulo Interrogantes de la
Investigación; seleccionar la información requerida, en función de las
variables expuestas en el Capítulo II, en el Cuadro de Operacionalización de
Variables; asegurar la calidad de los datos disponibles, por eso se escogió
como población a los dueños de las empresas visitadas, porque son los que
mejor conocen el trabajo, por lo que sus respuestas con fiables y de calidad;
establecer interrelaciones entre los datos, en el momento de desarrollar los
cuestionarios se tomó en cuanta, tanto las variables como las interrogantes,
para poder satisfacer los requerimientos del sistema; interpretar los datos,
para obtener conclusiones generalizadas; y para finalizar formular
recomendaciones, este paso se desarrolla en el Capítulo IV.
En base a esto, se proceso y analizó cada una de las preguntas
realizadas en el cuestionario, obteniendo como resultado las siguientes
tablas y gráficos, los cuales arrojaron determinadas conclusiones:

103
1. ¿Cuántos métodos de cultivo hidropónico hay? Especifique su
respuesta
En función a esta pregunta se creó una tabla (ver tabla nº 9) y un gráfico
(ver Gráfico nº 1), donde se reflejan la cantidad de métodos existentes
para las personas a las cuales se les realizó el cuestionario,
especificando los métodos que ellos conocen.
Tabla n° 9 Métodos de Cultivo Hidropónico
Empresa Métodos Especificaciones
Hidroponias Venezolanas 5 Camas de Agua Camas de Sustrato Recirculación (NFT) Mangas Verticales Sistema por Goteo
Benatural 6 Camas de Agua Camas de Sustrato Recirculación (NFT) Mangas Verticales Sistema por Goteo Método Alternativo
Fuente: Autor
Gráfico nº 1 Métodos de Cultivo Hidropónico
Fuente: Autor
Analizando estos resultados y uniéndolos con la teoría recolectada, se
observo que estos, son los métodos más usados y conocidos en el cultivo
0%20%40%60%80%
100% Camas de Agua
Camas deSustrato
NFT
MangasVerticales

104
hidropónico, pero que pueden surgir una gran variedad de métodos
alternativos, según la imaginación y los requerimientos del agricultor o
cultivador. Para el caso de este trabajo de grado, se seleccionó el método
alternativo, explicado por la compañía Benatural.
2. ¿Qué método practica?
En las visitas realizadas a cada compañía se puedo apreciar los métodos
aplicados por estas, para los diferentes cultivos, y según las respuestas
dadas por la población seleccionada, se obtuvieron los siguientes
resultados (ver Tabla nº 10 y Gráfico nº 2).
Tabla n° 10 Método Practicado
Compañía Método que Practica
Hidroponias Venezolanas NFT Camas de Sustrato Sistema por Goteo Camas de Agua
Benatural Camas de Agua
Fuente: Autor
Gráfico nº 2 Método Practicado
Fuente: Autor
0%
20%
40%
60%
80%
100%
HidroponiasVenezolanas
Benatural
Camas de Sustratos
Sistema por Goteo
Camas de Agua
NFT

105
En función a estos resultados, se realizó un estudio más extenso
sobre los métodos practicados por las compañías, para seleccionar el
método que más se adaptaba a las necesidades del prototipo a desarrollar.
Sin embargo, se escogió un método no practicado por ninguna de estas
compañías actualmente, que es un método alternativo, que cumple con las
funciones y requerimientos del prototipo.
3. ¿Qué tipos de contenedores utiliza?
Para el desarrollo de cultivos hidropónicos, existen una gran variedad de
contenedores, desde cajas y vasos de plásticos, hasta contenedores
realizados por el mis agricultor, pero entre los contenedores más usados
se encuentran, los tubos PVC, camas de plástico, madera o metal,
mangas verticales y mangas horizontales (ver Tabla nº 11 y Gráfico nº 3).
Tabla n° 11 Tipos de Contenedores
Compañía Método que Practica
Hidroponias Venezolanas Camas (plástico, madera o metal) Placas de anime Tubos PVC
Benatural Camas de madera
Fuente: Autor
Gráfico nº 3 Tipos de Contenedores
Fuente: Autor
0%
20%
40%
60%
80%
100%
HidroponiasVenezolanas
Benatural
Camas (plástico,madera o metal)
Tubos PVC
Placas de Anime

106
En función a estos datos y por su practicidad, se decidió trabajar con
tubos PVC, ya que son pequeños y manejables, lo que facilitaría el traslado
del contenedor.
4. ¿En qué lugar tiene los contenedores de las plantas?
Dependiendo del lugar y del cultivo que se desea plantar, el sembradío
puede estar ubicado al aire libre, en un invernadero o en el interior de un
hogar (ver Tabla nº 12 y Gráfico nº 4), esto depende de que tan grande
sea la plantación y que usos se les dará a la misma, si es para
producción industrial o simplemente producción familiar.
Tabla n° 12 Ubicación de los Contenedores
Compañía Método que Practica
Hidroponias Venezolanas Exterior Interior Invernaderos
Benatural Invernadero
Fuente: Autor
Gráfico nº 4 Ubicación de los Contenedores
Fuente: Autor
0%
20%
40%
60%
80%
100%
HidroponiasVenezolanas
Benatural
Exterior
Interior
Invernaderos

107
Analizando estos resultados, se observo que es posible, cultivar
plantas en el interior de un hogar, usando luz artificial, por lo que, para el
desarrollo de este prototipo se hizo un contenedor, que sostendría los tubos
PVC y su fuente de luz, seria netamente artificial.
5. ¿Qué tipos de Plantas Cultiva? Especifique
Existen una variedad muy extensa de plantas, desde las más pequeñas,
como el forraje, hasta las más grandes como los sauces, la mayoría de
estas, son completamente cultivables por medio de métodos
hidropónicos; mediante el cuestionario realizado, se pudo obtener
información sobre las plantas cultivadas en dichas compañías (ver Tabla
nº 13 y Gráfico nº 5), para así tener una día, de que plantas era más
factible usar para el desarrollo de este proyecto.
Tabla n° 13 Tipos de Plantas Cultivadas
Compañía Método que Practica
Hidroponias Venezolanas Alfalfa Berro Grano Chino Tomate Manzano Lechuga Cebollín Rúgula Maíz Dulce Radicchio
Benatural Berro
Fuente: Autor

108
Gráfico nº 5 Tipos de Plantas Cultivadas
Fuente: Autor
Analizando los resultados, se observo, que hay una variedad de
plantas que son más factibles de dar en climas templados que otras, por lo
que se procedió a seleccionar la lechuga, la acelga y el cilantro, como las
plantas a cultivar en el desarrollo de este proyecto, además de que son las
plantas que crecen con mayor velocidad.
6. ¿Qué procesos se deben controlar durante el desarrollo de la
planta? Especifique cada cuanto tiempo
Para el correcto desarrollo de una planta, que se cultiva mediante la
hidroponia, se requieren de ciertos procesos (ver Tabla nº 14 y Gráfico nº
6), para suplir los procesos naturales que les brindaba la siembre en
tierra. Dentro de estos procesos se encuentran la aireación de la solución,
el movimiento de los nutrientes, la incidencia de luz, y el tiempo de
cosecha.
0%
20%
40%
60%
80%
100%
HidroponiasVenezolanas
Benatural
Alfalfa
Berro
Grano Chino
Tomate Manzano
Lechuga
Cebollín
Rúgula
Maíz Dulce

109
Tabla n° 14 Procesos a Controlar
Procesos Tiempo Min
Aireación de la Solución 15
Movimiento de Nutrientes 15
Incidencia de Luz 720 aproximadamente
Fuente: Autor
Gráfico nº 6 Procesos a Controlar
Fuente: Autor
En función a esto, se determinó cada cuanto tiempo se encendería la
bomba del aire ubicada dentro del tanque de la solución, la cual se activaría
cada dos (2) horas y media, durante quince (15) minutos; en el caso del
movimiento de nutrientes, se realizó con sensores de líquido, en función de
los cuales se activarían o desactivarían las bombas de agua, que generarían
dicho movimiento; y por último en el caso de la incidencia de la luz, cada
planta requiere de un tiempo determinado de exposición a la luz, siendo el
caso de la lechuga y la acelga, de doce (12) horas y para el cilantro catorce
(14) horas.
7. Indique en días, el tiempo estimado de gestación, según las plantas
que cultiva
Cada planta tiene un tiempo determinado para cada una de sus fases,
que en general son, germinación y cosecha, pero en el caso de la
-
200
400
600
800
1.000
Lechuga Acelga Cilantro
Aireación de laSolución
Movimiento deNutrientes
Incidencia de Luz

110
hidroponia y dependiendo del método que se esté utilizando, es necesario
hacer dos trasplantes, los cuales se hacen a determinado tiempo según la
planta (ver Tabla nº 15 y Gráfico nº 7).
Tabla n° 15 Tiempo de Gestación
Planta Germinación 1er Trasplante
2do Trasplante
Cosecha
Alfalfa 10 28 40 75
Berro 6 17 28 60
Grano Chino 10 28 40 75
Tomate Manzano 6 20 35 65
Lechuga 3 21 30 50
Cebollín 10 20 33 55
Rúgula 5 23 32 55
Maíz Dulce 10 25 35 70
Radicchio 10 20 33 55
Fuente: Autor
Gráfico nº 7 Tiempo de Gestación
Fuente: Autor
Una vez analizado esto, se escogieron como plantas, la lechuga, la
acelga y el cilantro, que son plantas que se dan en climas templados y en
cortos plazos, ideales para la demostración del prototipo en desarrollo.
0
20
40
60
80
Alf
alfa
Be
rro
Gra
no
Ch
ino
Tomate…
Lech
uga
Ce
bo
llín
Rú
gula
Maí
z D
ulc
e
Rad
icch
io
Germinación
1er Trasplante
2do Trasplante
Cosecha

111
8. Indique en centímetros (cm), el tamaño estimado para la planta,
según su proceso de desarrollo.
Cada planta, en determinada etapa tiene un tamaño diferente, y esto se
debe a su proceso de desarrollo (ver Tabla nº 16 y Gráfico nº 8), a
medida que van pasando los días la planta se extiende en longitud y
volumen, hasta que llega a su tamaño indicado para ser cosechada.
Tabla n° 16 Tamaño de las Plantas
Planta Germinación 1er Trasplante
2do Trasplante
Cosecha
Alfalfa 5 7 10 15
Berro 5 10 15 20
Grano Chino 5 7 10 15
Tomate Manzano 10 30 45 60
Lechuga 10 15 20 30
Cebollín 15 25 40 50
Rúgula 10 15 20 30
Maíz Dulce 15 30 45 60
Radicchio 10 15 20 30
Fuente: Autor
Gráfico nº 8 Tamaño de las Plantas
Fuente: Autor
0
10
20
30
40
50
60
Germinación
1er Trasplante
2do Trasplante
Cosecha

112
Como el contenedor realizado para el prototipo tiene un tamaño
flexible, para poder ser trasladado con comodidad y eficiencia, se requieren
plantas con una tamaño específico que entren dentro de este contenedor,
por esta otra razón se seleccionaron la lechuga, la acelga y el cilantro, que a
la hora de la cosecha alcanzan un tamaño de treinta (30) centímetros.
9. Según la planta que cultiva, rellene el siguiente cuadro. (ver Tabla nº
17 y Gráfico nº 9)
Tabla n° 17 Luz para las Plantas
Planta Luz
Incandescente Luz
Fluorescente Luz
Solar Luz
Combinada
Tiempo de Exposición
(horas)
Potencia x m
2
(watts)
Alfalfa X 12
Berro X 12
Grano Chino
X 12
Tomate Manzano
X 12
Lechuga X 12
Cebollín X 12
Rúgula X 12
Maíz Dulce
X 12
Radicchio X 12
Fuente: Autor

113
Gráfico nº 9 Luz para las Plantas
Fuente: Autor
0
2
4
6
8
10
12
Luz Incandescente
Luz Fluorescente
Luz Solar
Luz Combinada

114
CAPÍTULO IV
SISTEMA PROPUESTO
En este capítulo se despliegan aquellas actividades sistemáticas que
se ejecutaron en el transcurso del desarrollo de este prototipo de sistema de
control para cultivos hidropónicos, con el fin de cumplir con los objetivos
expuestos en el Capítulo I y que en consecuencia permitieron desarrollar
este trabajo de grado, exponiendo los procedimientos y técnicas,
implementadas para resolver la problemática planteada.
Para cumplir con los objetivos específicos, este proyecto de grado se
desarrollo en dos etapas, la primera es la etapa teórica y de recolección de
datos, cuya finalidad fue dar respuesta a las primeras seis (6) interrogantes
de la investigación, logrando así el cumplimiento de los seis (6) primeros
objetivos específicos.
Siendo así, se procede a desarrollar el cada objetivo:
4.1 DEFINIR EL MÉTODO DE CULTIVO DE RAÍZ FLOTANTE QUE SERÁ
UTILIZADO PARA LA APLICACIÓN DEL PROTOTIPO A DESARROLLAR.
Una vez estudiados y analizados los métodos de cultivo hidropónico
de raíz Flotante, y según las respuestas dadas en el instrumento de
recolección de datos (ver Tabla n° 9), se escogió un método de raíz flotante

115
alternativo, usando tubos PVC, donde la planta se siembra directamente en
el tubo PVC definitivo, para que cumpla todo su proceso de desarrollo, en
este, sin necesidad de realizar los trasplantes.
Este método consiste en agujerar los tubos PVC en este caso de tres
pulgadas (3”) y 75 cm de largo (ver Figura n° 58), a determinada distancia
(en este caso a 12 cm aproximadamente), luego en estos agujeros se
introdujeron pequeños vasos de plástico agujerados en el fondo (ver Figura
n° 59), con el fin de que las raíces de las plantas salgan por ese agujero y a
demás entre la solución nutritiva; estos vasos son rellenados en tres cuartas
partes (3/4) de un sustrato liviano, específicamente arcilla expandida (ver
Figura n° 60), y una cuarta parte (1/4) con un sustrato combinado (ver Figura
n° 61 y Tabla n° 18). Luego en esta pequeña capa de sustrato se colocaron
las semillas, y por medio de mangueras y bombas de agua conectadas a los
tubos PVC se hará recircular la solución nutritiva, desde un tanque hasta
cada uno de los tubos, por separado. Estos tubos tienen una pequeña
inclinación para facilitar el drenaje por medio de gravedad.
Figura n° 58 Tubos PVC Perforados
Fuente: Autor

116
Figura n° 59 Vaso Perforado
Fuente: Autor
Figura n° 60 3/4 de Arcilla Expandida
Fuente: Autor
Figura n° 61 1/4 de Sustrato Combinado
Fuente: Autor

117
Tabla n° 18 Composición del Sustrato Combinado
Sustancia Cantidad (%)
Nitrógeno Total (N) 0,04%
Fósforo (P2O5) 1,52%
Potasio (K2O) 0,08%
Magnesio (Mg) 0,13%
Calcio (Ca) 0,94%
Fuente: Autor
Los tubos PVC fueron colocados en un contenedor de madera HDF de
1,5 cm de espesor, con una altura de 75 cm, una profundidad de 80 cm y un
largo de 120 cm (ver Figura n° 61), elaborado con cuatro (4) divisiones a 28,8
cm cada una, de las cuales tres son para colocar los tubos PVC con su
iluminación y una para colocar los dispositivos electrónicos como el PLC y el
PIC. Este contenedor estará ubicado en el exterior, en un área de tres metros
cuadrados (3 m2).
Figura n° 62 Contenedor de Madera HDF
Fuente: Autor
Se escogió este método de cultivo hidropónico, debido a su
practicidad, ya que se pueden cultivar diferentes tipos de plantas en un

118
espacio reducido y sin la necesidad de hacer trasplantes. Los tubos PVC son
de pequeña magnitud, por lo que se logró hacer un contenedor
medianamente pequeño, a diferencia del cultivo con placas de anime en
camas de agua, que requieren una mayor área de trabajo y solo se puede
producir un cultivo por cama de agua, lo que lo hace menos ventajoso.
4.2 IDENTIFICAR EN FUNCIÓN DEL MÉTODO SELECCIONADO, LAS
PLANTAS QUE SERÁN CULTIVADAS
Existen una gran variedad de plantas, y la mayoría de ellas pueden
ser cultivadas en hidroponía, unas en sustrato sólido y otras en raíz flotante.
Pero según la información recolectada (ver Tabla n° 15) con los cuestionarios
hechos en la compañía Hidroponias Venezolanas y Benatural, se llegó a la
conclusión de sembrar Lechuga Romana, Acelga y Cilantro, que son cultivos
que se dan fácilmente en el tipo de método seleccionado, además germinan
y se cosechan en corto tiempo, no son de gran tamaño y son de este tipo de
clima.
La empresa Benatural, queda ubicada en La Unión, sector Corralito,
Finca Nueva Esparta, municipio El Hatillo, es una empresa especialista en
berro hidropónico (ver Figura n° 63) el cual se cultiva en camas de agua (ver
Figura n° 64), es una empresa familiar fundada en 1998, y es uno de los
proveedores de grandes automercados. Mientras que Hidroponias
Venezolanas, es una empresa fundada en 1972, y es la primera empresa
que utilizó la hidroponia en Venezuela, ofreciendo productos de alta calidad,
dentro de los cuales se encuentran la lechuga, el tomate, la alfalfa, el grano
chino, la rúcula, el maíz y el cebollín.

119
Figura n° 63 Cultivo Hidropónico de Berro
Fuente: Autor
Figura n° 64 Contenedores de Berros Hidropónicos
Fuente: Autor
4.2.1 Lechuga Romana
Es una variedad de lechuga, pero de hojas más largas y robustas, es
bastante resistente al calor, a diferencia de otras. Su germinación en cultivo
hidropónico tarda entre 3 y 4 días, es una planta que puede ser cultivada

120
tanto en raíz flotante como en sustrato sólido. Se escogió este tipo de planta,
por ser muy adaptables, de rápida germinación y cosecha, muy permisibles
con respecto al clima y de tamaño pequeño. La marca de las semillas
compradas es Votre Jardín, y según sus especificaciones, esta lechuga es
una variedad precoz de verano y otoño, bastante resistente al calor, que
produce un corazón alargado con punta redondeada, de color verde rubio, y
con hojas crujientes y gruesas.
4.2.2 Acelga
Se caracteriza por tener un follaje verde y frondoso, de hojas anchas y
encrespadas. Esta es una planta de climas templados, pero que se adapta
muy bien a diferentes condiciones ambientales, siempre y cuando no sean
extremas. Para su siembra, se pueden colocar dos semillas por vasos, y
cuando germinen, se desecha una de las plántulas para que la otra crezca
sin inconvenientes. Su germinación es entre 6 y 7 días después de la
siembra, y su cosecha es de 35 a 40 días.
4.2.3 Cilantro
Es una planta de climas templados, cuya germinación tarda entre
cuatro (4) días, y su cosecha se da en 45 días, requiere de mucha
iluminación y su altura aproximada es de 30 cm. Se escogió esta planta,
porque también es de clima templado y es relativamente rápido de cosechar.

121
Se escogieron puras plantas de hojas verdes, ya que son más
factibles para el tipo de método seleccionado, dan largas raíces, lo que
facilita su riego por medio de recirculación, no son plantas pesadas y ellas
mismas pueden soportar sus hojas sin necesidad de soportes.
4.3 DETERMINAR EL TIEMPO DE EJECUCIÓN DE LOS PROCESOS QUE
SE DESEAN CONTROLAR
Según el cuestionario desarrollado, los procedimientos de más
importancia son la aireación de la solución nutritiva y el movimiento de los
nutrientes. Sin embargo, para el desarrollo de este proyecto de grado,
también se tomó la incidencia de luz artificial y el control del tiempo para la
cosecha de las plantas.
4.3.1 Aireación de la Solución Nutritiva
Consiste en airear la solución que se encuentra en el tanque
contenedor, con el fin de evitar que la solución nutritiva pierda su
oxigenación, ya que el contenedor es cerrado, y así evitar que se produzcan
hongos u otros organismos. Este proceso se debe hacer por lo menos 10
veces al día durante 15 minutos. Lo que lleva a que cada 2,4 horas se debe
realizar el proceso de aireación, ya que si el día tiene 24 horas, es decir,
1440 minutos, y se necesita realizar 10 veces al día, se divide:

122
Para fines de este proyecto, el proceso de aireación se hará con una
bomba de aire, que a la vez es un filtro, ubicado en el fondo del contenedor
de la solución.
4.3.2 Movimiento de Nutrientes
Consiste en mover los nutrientes, para evitar la estanqueidad de la
solución, y así no permitir la producción de moho u otros hongos. Este se
hace en un tiempo de preferencia, pero para el caso de este proyecto de
grado se hará en el tiempo que dure el tubo PVC en llegar a su nivel bajo, es
decir, cada vez que la solución llegue al nivel bajo del tubo, se encenderá
una bomba de agua ubicada en el tanque de la solución, lo que impulsará la
solución nuevamente al tubo PVC, generando movimiento en la misma.
4.3.3 Incidencia de la Luz Artificial
Consiste en la cantidad necesaria de luz que requiera cada planta,
esta será medida en horas por día, y según los resultados obtenidos con el
instrumento de recolección de datos (ver Tabla n° 17), la lechuga y la acelga
requieren entre 10 a 12 horas de luz; mientras que el cilantro requiere de 12
a 14 horas de luz. Cuando es luz artificial, se usa luz fluorescente de baja
potencia entre 15 y 40 watts, ya que la luz incandescente tiende a generar
mucho calor y consumir mucha energía. La administración de esta luz, se
hará por medio de bombillos fluorescentes de 15 watts.

123
4.3.4 Control de Tiempo de Cosecha
Se refiere al tiempo en el que la planta puede ser cosechada, y según
como se expuso anteriormente, la lechuga se cosecha de 17 a 23 días, la
acelga de 35 a 40 días y el cilantro a los 45 días. Este proceso se controlará
con un microcontrolador PIC y un teclado numérico.
4.4 ESTABLECER LOS SENSORES Y ACTUADORES ADECUADOS
PARA CUBRIR LAS VARIABLES DEL MÉTODO DE RAÍZ FLOTANTE
QUE SE DESEAN CONTROLAR EN EL DESARROLLO DE ESTE
PROTOTIPO
Para el desarrollo de este proyecto, se ameritó de ciertos sensores y
actuadores, que conjuntamente con los controladores, logran el
funcionamiento correcto del prototipo. Entre los sensores se encuentran un
switch de seguridad, dos pulsadores, uno de encendido y otro de
emergencia, un teclado y los sensores de nivel. Por otro lado, entre los
actuadores, están, los indicadores, las bombas de agua y de aire, las
lámparas y la alarma.
4.4.1 Switch de Seguridad
Es un interruptor Magnetotérmico de protección (ver Figura n° 65), con
la finalidad de interrumpir la corriente eléctrica, en caso de que un circuito
sobre pase, la corriente máxima; su funcionamiento se base en el efecto

124
Joule y consta de dos partes, un electroimán y una lámina bimetálica. Es de
la marca Schneider y aguanta hasta 4 amperios.
Figura n° 65 Interruptor Magnetotérmico
Fuente: Autor
4.4.2 Pulsadores
Para efectos del desarrollo de este sistema de control, se requirieron
dos pulsadores, el primero (HS 001) de color verde y de contacto
normalmente abierto (ver Figura n° 66), cuya finalidad es dar el encendido al
sistema de control; y el segundo (HS 002) es tipo hongo de color rojo y de
contacto normalmente cerrado (ver Figura n° 67) y es un pulsador de parada
de emergencia, en caso de que valga la redundancia haya una emergencia.
Ambos pulsadores son la marca Schneider y trabajan con varios voltajes,
desde 12/24Vdc hasta 110/240Vac.

125
Figura n° 66 Pulsador Verde de Encendido
Fuente: Autor
Figura n° 67 Pulsador de Parada de Emergencia
Fuente: Autor
4.4.3 Teclado Numérico
Es un conjunto de teclas que hace referencia a los números, y en este
caso será usado para introducir al PIC la cantidad de días que se requieren
para la cosecha de cada planta, lo cual luego se verá reflejado en un
actuador.
4.4.4 Sensores de Nivel
Consiste en una sonda de plástico con una varilla de metal interna, la
cual al entrar en contacto con el líquido envía una señal, a través de un

126
cable, conectado a las entradas del PLC. El sensor de nivel alto (LSH 00X)
(ver Figura n° 68), consiste en colocar la sonda dentro del tubo PVC a una
altura de 5,5 cm del piso del tubo, para que cuando el tubo PVC llegue a su
nivel máximo, toque la varilla de metal, lo que hará que el contacto cambie
de lugar, de normalmente abierto, a normalmente cerrado, permitiendo la
entrada al PLC. Con respecto al nivel bajo (LSL 00X) (ver Figura n° 69),
consiste en el mismo mecanismo, con la diferencia de que la sonda se
encuentra a una distancia de un centímetro (1cm) del piso del tubo PVC, de
modo que la sonda estará permanentemente cerrada, hasta que la solución
en el tubo llegue al nivel mínimo, cuando el líquido deje de tocar la varilla de
metal, haciendo que cambien los contactos, de normalmente cerrado (NC) a
normalmente abierto (NO), permitiendo la entrada al PLC. Se colocaron tres
(3) sensores de nivel alto, uno para cada tubo PVC y cuatro (4) sensores de
nivel bajo, uno para cada tubo PVC y otro para el nivel bajo del tanque de la
solución nutritiva.
Figura n° 68 Sensor de Nivel Alto
Fuente: Autor

127
Figura n° 69 Sensor de Nivel Bajo
Fuente: Autor
4.4.5 Indicadores
Para efectos de este proyecto se usaron seis (6) indicadores (N),
cuatro indicadores verdes y dos indicadores rojos (ver Figura n° 70).
Figura n° 70 Tablero de Indicadores
Fuente: Autor

128
Indicador de Encendido NHS 001
Este indicador (ver Figura n° 71), tiene la funcionalidad de mostrar que
todo el sistema está en funcionamiento, trabaja con 24V y está directamente
conectado a la salida Q1 del CPU del banco del PLC y a la bornera de 0V.
Este indicador se enciende cuando se presiona el pulsador de encendido
(HS 001).
Figura n° 71 Indicador de Encendido NHS 001
Fuente: Autor
Indicador de Parada de Emergencia NHS 002
El indicador NHS 002 (ver Figura n° 72), tiene la finalidad de indicar
cuándo hay una parada de emergencia, es decir, cuando el pulsador de
emergencia (HS 002) es accionado. Este está conectado directamente a la
salida Q2 del CPU del banco del PLC y a la bornera de 0V.

129
Figura n° 72 Indicador de Parada de Emergencia NHS 002
Fuente: Autor
Indicador de Nivel Bajo del Tanque NLSL 001
Este indicador (ver Figura n° 73), Consiste en indicar cuando el nivel
del tanque donde se encuentra la solución nutritiva, tiene el nivel bajo, es
decir, que está por debajo de límite permitido, este está conectado
directamente a la salida Q2 del módulo 1 del banco del PLC, y a la bornera
de 0V.
Figura n° 73 Indicador de Nivel Bajo del Tanque NLSL 001
Fuente: Autor

130
Indicadores de Accionamiento de las Bombas de Agua
Consisten en indicar cuando la bomba de agua de alguno de los tubos
PVC ha sido encendida (ver Figura n° 74), por ejemplo, el indicador NP. 002,
muestra que la bomba P.002, que va dirigida del tanque de la solución al
tubo PVC A, está encendida. Lo mismo sucede con la bomba P.003 y P.004,
que al activarse se encienden los indicadores NP.003 y NP.004
respectivamente. Estos indicadores están conectados a un banco de relés,
para que se activen con 110V, junto con las bombas y a la bornera de neutro.
Figura n° 74 Indicadores de Accionamiento de las Bombas de Agua
Fuente: Autor
Bombas
En el desarrollo de este proyecto, existen dos tipos de bombas, la
primera es una bomba de aire (P.001), cuya función es airear la solución
nutritiva, esta estará ubicada dentro del tanque, y se accionará cada 2,4
horas, por 15 minutos. Está conectada al banco de relés y a la bornera de
neutro. Es una bomba filtro, marca Dolphin (ver Figura n° 75), modelo F-800,
trabaja a 110V/60Hz y consume 6W, y tiene un caudal de 300 L/H (litros por
hora). La segunda, son tres bombas de agua, una para cada tuvo PVC, es

131
decir, PVC A, PVC B y PVC C, con las bombas P.002, P.003 y P.004
respectivamente, su función es suministrar la solución nutritiva a los tubos, y
se activan, cada vez que el sensor de nivel bajo del tubo PVC
correspondiente (LSL 00X) se active. Están conectadas al banco de relés y a
las borneras de neutro. Son bombas marca Boyu (ver Figura n° 76), modelo
SP-700, trabaja a 110/220V, con una frecuencia de 60/50Hz y tiene un
caudal de 230 L/H (litros por hora).
Figura n° 75 Bomba de Aire
Fuente: Autor
Figura n° 76 Bombas de Agua
Fuente: Autor

132
Lámparas
Consiste en tres conexiones en serie, de tres bombillos cada una (ver
Figura n° 77). Cada conexión se encarga de suplir de luz artificial a las
plantas; estas están ubicadas en cada una de las divisiones del contenedor.
Constan de tres bombillos de luz fluorescente (luz blanca) de 20 watts. Están
conectadas al banco de relés y a las borneras de neutro. Se activan al
encender el prototipo, según el requerimiento de las plantas, es decir a las 12
horas para la lechuga y la acelga, y durarán encendidas 12 horas; y a las 10
horas para el cilantro, y durarán encendidas 14 horas.
Figura n° 77 Lámparas
Fuente: Autor
Alarma
Consiste en una corneta, que controlada por el microcontrolador PIC,
indicará mediante la emisión de un sonido que el cultivo está listo para ser
cosechado. Esto ocurrirá, cuando el tiempo que corre en cuanta regresiva en
la pantalla LCD llegue a cero.

133
Pantalla LDC
Consiste en una pantalla LDC de 16 x 2, controlada con el PIC, en la
cual se mostrará el cultivo y el tiempo que falta para su cosecha. Esto se
logra mediante rutinas, programadas en lenguaje assembler.
4.5 SELECCIONAR EL MODELO DE PLC ADECUADO, PARA
CONTROLAR LAS VARIABLES DEL SISTEMA DE CONTROL
PROPUESTO
Con el estudio de las propiedades cualitativas y cuantitativas, que se
necesitaban para el desarrollo de este proyecto, se logró seleccionar de
entre varios modelos de PLC de diferentes marcas, el PLC correcto, para que
cumpliera con los requisitos necesarios de este sistema de control.
Con respecto a las propiedades cualitativas, este proyecto de trabajo
de grado necesita, de una velocidad de trabajo moderada, ya que la
activación o desactivación de las bombas tiene que ser rápido, para evitar
que se quemen, por eso la lectura del programa debe ser rápida; la tención
de alimentación de varios de los dispositivos, como las bombas y las luces,
es de 110V, pero otros dispositivos como los indicadores necesitan de 24V
por lo que se necesitan este tipo de tensiones; debido a la cantidad de
entradas y salidas; se requiere que el PLC seleccionado se ampliable; que la
comunicación se haga por medio de un cable de puerto USB; y que el
software sea compatible con Windows Vista.
Con respecto a las propiedades cuantitativas, se requiere de nueve (9)
entradas digitales y trece (13) salidas de relé; también se requiere de 4

134
temporizadores; a demás de que se encuentre en un precio accesible para
los integrantes de este trabajo de grado.
Por esta razón se seleccionó el PLC LOGO! 12/24RC, de la marca
Siemens, conjuntamente con tres (3) módulos de ampliación DM8 12/24R
(ver Figura n° 78), cuyas especificaciones técnicas se encuentra en la
siguiente imagen (ver Figura n° 79 y 80) y una fuente de poder LOGO!
Power de cuatro amperes (4A). Se escogió esta fuente, por el consumo de
todos los dispositivos (ver Tabla n° 19).
Figura n° 78 Banco de PLC
Fuente: Autor

135
Figura n° 79 Especificaciones Técnicas del LOGO! 12/24RC y los Módulos de Expansión DM8 12/24R
Fuente: Autor

136
Figura n° 80 Especificaciones Técnicas del LOGO! 12/24RC y los Módulos de Expansión DM8 12/24R...Continuación
Fuente: Autor
Tabla n° 19 Tabla de Consumo
Dispositivo Voltaje (V) Potencia (W) Corriente (I)
Bomba de Aire (P.001)
110 5 0,04
Bomba de Agua 110 5 0,04

137
(P.002)
Bomba de Agua (P.003)
110 5 0,04
Bomba de Agua (P.004)
110 5 0,04
Indicador (NHS 001) 24 0,21 0,008
Indicador (NHS 002) 24 0,21 0,008
Indicador (NLSLT) 24 0,21 0,008
Indicador (NP.002) 110 1 0,009
Indicador (NP.003) 110 1 0,009
Indicador (NP.004) 110 1 0,009
Lámpara A 110 45 0,8
Lámpara B 110 45 0,8
Lámpara C 110 45 0,8
LOGO! 12/24RC 24 1 0,04
DM8 12/24R Módulo 1
24 0,4 0,02
DM8 12/24R Módulo 2
24 0,4 0,02
DM8 12/24R Módulo 3
24 0,4 0,02
2,7
Fuente: Autor
4.5.1 Software de Programación
El software de programación de este modelo de PLC es LOGO!Soft
Comfort V6.1 (ver Figura n° 81), que es un software basado en programación
en lenguaje escalera; es compatible con casi todos los sistema operativos y
tiene un entorno gráfico amigable y entendible (ver Figura n° 82). Se puede
programar en dos ventanas, la primera es en diagrama de funciones, donde
la simbología se representa en bloques; y la segunda es en esquema de
contactos, donde la simbología se representa en contactos. Con respecto a
las funciones de programación, consta de dos grandes grupos para el
esquema de contactos, en donde en el primer grupo llamado constantes (ver
Figura n° 83), se encuentran las entradas (contactos) y salidas (bobinas)
necesarias para realizar la programación; y en el segundo grupo se

138
encuentran las funciones especiales, como los temporizadores, contadores,
analógicos y otros (ver Figura n° 84). Mientras que el diagrama de funciones
consta de tres grupos, el primero es el grupos de constantes (ver Figura n°
85); el segundo es el grupos de funciones básicas (ver Figura n° 86); y por
último el grupo de funciones especiales (ver Figura n° 87).
Figura n° 81 LOGO!Soft Comfort V6.1
Fuente: Autor
Figura n° 82 Entorno Gráfico
Fuente: Autor

139
Figura n° 83 Constantes en Esquema de Contactos
Fuente: Autor
Figura n° 84 Funciones Especiales en Esquema de Contactos
Fuente: Autor

140
Figura n° 85 Constantes en Diagrama de Funciones
Fuente: Autor
Figura n° 86 Funciones Básicas en Diagrama de Funciones
Fuente: Autor
Figura n° 87 Funciones Especiales en Diagrama de Funciones
Fuente: Autor

141
4.6 ELEGIR EL MODELO DE MICROCONTROLADOR PIC ADECUADO,
PARA CONTROLAR Y VISUALIZAR EL TIEMPO QUE REQUIERE EL
CULTIVO PARA SER COSECHADO
Los microcontroladores PIC, poseen cuatro (4) familias, cuya
diferencia radica en el número de instrucciones y su longitud; el número de
puertos y sus funciones; la complejidad de programación; y el número de
aplicaciones. Estas familias se clasifican en microcontroladores de gama
enana, que cuenta con ocho (8) patillas, se alimentan entre 2,5V y 5,5V, y su
formato de instrucciones puede ser de 12 a 14 bits, con un repertorio de 33 o
35 instrucciones respectivamente y su modelo es PIC12CXXX; la gama baja,
corresponde a la familia PIC16C5XX, son una serie de recursos limitados,
con instrucciones de 12 bits, pueden venir con 18 o 28 paticas, y se
alimentan a partir de 2,5V, tienen un repertorio de 33 instrucciones y no
admiten ningún tipo de interrupción; gama mediana, se refiere a la familia
PIC16CXXX con instrucciones de 14 bits, abarca a los modelos desde 18 a
68 paticas, y es la más variada y completa familia de PIC, tiene un repertorio
de 35 instrucciones y dispone de interrupciones; por último se encuentra la
gama alta, con instrucciones de 16 bits y con un repertorio de 58
instrucciones, dispone de un sistema de gestión de instrucciones muy
potente.
Con estos conocimientos y tomando en cuenta los criterios cualitativos
y cuantitativos requeridos por este trabajo de grado, como por ejemplo, el
tipo de memoria, la cantidad de periféricos, el tipo de lenguaje de
programación, el software, y los bytes de memoria RAM, se procedió a
seleccionar el PIC 16F877A (ver Figura n° 88). Ya que es el que mejor se
adapta a los requerimientos del sistema.

142
Figura n° 88 Especificaciones Técnicas del Microcontrolador PIC
Fuente: Autor
4.7 DISEÑAR Y DESARROLLAR EL PROGRAMA DE CONTROL DE
AIREADO, NIVEL DE AGUA, MOVIMIENTO DE NUTRIENTES Y LUZ
ARTIFICIAL, BASADO EN LENGUAJE ESCALERA PARA EL PLC
ELEGIDO
El desarrollo de este programa se realizo, en el software LOGO!Soft
Comfort, y consta de una serie de contactos, bobinas y temporizadores, que
hacen posible, el correcto funcionamiento del sistema. Basados en los
conocimientos adquiridos a lo largo de la carrera y en el desarrollo de este
trabajo de investigación, los cuales se pusieron en práctica, se logró diseñar
y desarrollar un programa en lenguaje escalera (ver Figura n° 89), que
pudiese controlar mediante el controlador lógico programable PLC, los

143
procesos vitales, para el desarrollo de la planta en cultivos hidropónicos de
raíz flotante.
La primera parte del programa (ver Figura n° 89), consiste en la
puesta en marcha de todo el sistema, es decir, cuando se acciona la entrada
I1 (pulsador de encendido), se activa la entrada SET de un relé auto
enclavador, lo que acciona una marca (M1), esta marca es indispensable,
para el accionamiento de las demás salidas, entre ella la salida Q1 (indicador
de encendido); si se acciona la entrada I2 (pulsador de parada de
emergencia), se activa otra marca (M2), de la cual depende, junto con una
tercera marca (M3) la entrada RESET del relé auto enclavador, al accionarse
cualquiera de estas dos marcas, se para todo el sistema, accionando la
salida Q2 (indicador de parada de emergencia) para la segunda marca (M2).
Figura n° 89 Puesta en Marcha... Programa
Fuente: Autor

144
En la siguiente fase, se tiene la parada de emergencia, por la
activación del sensor del nivel bajo del tanque (ver Figura n° 90); si la
entrada I9 (sensor de nivel bajo del tanque) se activa, se activa un
temporizador durante treinta segundos (30 seg), al transcurrir este tiempo, se
enciende la tercera marca (M3), la cual activa la salida Q6 (indicador de nivel
bajo del tanque) y a su vez, junto con la segunda marca (M2), activan la
entrada RESET del relé auto enclavador (SF006), es decir, que al accionarse
cualquiera de estas dos marcas, el sistema hace una parada de emergencia,
activando también, la salida Q2 (indicador de parada de emergencia).
Figura n° 90 Parada de Emergencia por Nivel Bajo... Programa
Fuente: Autor
Luego se procede al accionamiento de las bombas (ver Figura n° 91),
mientras la primera marca (M1) esté activada, y la entrada I9 (sensor de nivel
bajo del tanque) este desactivada, los sensores de nivel alto (LSH 00X) estén
desactivados y los de nivel bajo (LSL 00X) activados, se encienden las
bombas A, B y C. correspondiente a cada sensor, hasta que el sensor de
nivel alto de cada una de ellas se active, con lo cual se apagará la bomba
correspondiente.

145
Figura n° 91 Accionamiento de las Bombas... Programa
Fuente: Autor
La activación de la bomba de aire (ver Figura n° 92), se hace por
medio de un temporizador. Cuando la primera marca (M1) está activa, la
entrada SET de un relé auto enclavador (SF008) también se activa,
encendiendo un temporizador de retardo a conexión/desconexión (T001), el
cual al transcurrir un tiempo de dos horas y media (2:30 horas), enciende la
salida Q7 (bomba de aire), y una vez pasados quince minutos (15 min), la
apaga. Y así sucesivamente.
Figura n° 92 Activación de la Bomba de aire... Programa
Fuente: Autor

146
Por último está la activación de las lámparas fluorescentes (ver Figura
n° 93), cuyo proceso es el mismo que con el de la bomba de aire, es decir,
con el uso de un temporizador de retardo a conexión/desconexión, con un
tiempo de 12/12 horas para la lechuga (luz fluorescente A) y la acelga (luz
fluorescente B); y 10/14 horas para el cilantro (luz fluorescente C); un relé
auto enclavador (SF007), (SF010), (SF012) respectivamente y la marca 1
(M1) activada.
Figura n° 93 Activación de Lámparas... Programa
Fuente: Autor

147
4.8 DISEÑAR Y DESARROLLAR EL PROGRAMA DE CONTROL Y
VISUALIZACIÓN DEL TIEMPO ESTIMADO PARA LA COSECHA DEL
CULTIVO, PARA EL MICROCONTROLADOR PIC ELEGIDO
El programa de control y visualización del tiempo de cosecha, fue
desarrollado en el lenguaje assembler, consta de nueve rutinas, entre las
cuales se encuentran, teclado, columna, fila y display. Consiste en introducir
por medio del teclado la cantidad de días que requiere cada planta para ser
cosechada, esta información se verá reflejada en una pantalla LCD, y se verá
en conteo regresivo del tiempo restante, el cual al llegar a cero, originará una
alarma.
4.8.1 Programa en Assembler
list p=16f870
include "p16f870.inc"
org 0
goto inicio
inicio org 10h
bcf STATUS,RP1
bsf STATUS,RP0
clrf TRISB
clrf TRISA
movlw b'11110000'
movwf TRISC
bcf STATUS,RP0
teclado
movlw b'00001110'

148
movwf PORTC
columna btfss PORTC,4
call fila
btfss PORTC,5
call fila1
btfss PORTC,6
call fila2
btfss PORTC,3
goto teclado
bsf STATUS,C
rlf PORTC,1
goto columna
fila btfss PORTC,0
movlw 060h
btfss PORTC,1
movlw 066h
btfss PORTC,2
movlw 0E0h
btfss PORTC,3
movlw 09Ch
call display
return
fila1 btfss PORTC,0
movlw 0DAh
btfss PORTC,1
movlw 0B6h
btfss PORTC,2
movlw 0FEh
btfss PORTC,3
movlw 0FCh
call display1
return
fila2 btfss PORTC,0
movlw 0F2h
btfss PORTC,1
movlw 0BEh
btfss PORTC,2
movlw 0E6h

149
btfss PORTC,3
movlw 09Eh
call display2
return
display
movwf PORTB
movlw 0eh
movwf PORTA
call antirrebote
return
display1
movwf PORTB
movlw 0dh
movwf PORTA
call antirrebote
return
display2
movwf PORTB
movlw 0bh
movwf PORTA
call antirrebote
return
antirrebote
b1 btfss PORTC,4
goto b1
b2 btfss PORTC,5
goto b2
b3 btfss PORTC,6
goto b3
return
end
La rutina de inicio consiste en configurar los puertos de salida y los
puertos de entradas; la rutina teclado, consiste en la verificación del número

150
pisado; la rutina columna verifica la columna activada; la rutina fila
comprueba que fila fue activada y la rutina display, muestra en la pantalla
LCD la información suministrada.
4.8 EJECUTAR EL PROTOTIPO DE SISTEMA DE CONTROL DESARROLLADO
El sistema de control propuesto, se encarga de solventar una
problemática existen en el cultivo hidropónico. Con la simple aplicación de
unos sensores, controladores y actuadores, se puedo automatizar un sistema
de raíz flotante. La explicación de este sistema se dará en dos partes, la
primera parte es la realizada con el controlador lógico programable PLC (ver
Diagrama n° 4); y la segunda es la realizada con el microcontrolador PIC (ver
Diagrama n° 5).
Diagrama n° 4 Diagrama en Bloques del Sistema Propuesto para PLC
Fuente: Autor
•Pulsadores
•Sensores de Nivel
Sensores
• PLC
Controlador •Indicadores
•Bombas
•Lámparas
Actuadores

151
Diagrama n° 5 Diagrama en Bloques para Sistema Propuesto para PIC
Fuente: Autor
4.8.1 Ejecución del Proceso con PLC
Lo primero que se hizo en la ejecución del proyecto con PLC, fue
establecer las entradas y salidas (ver Tabla n° 20), luego se definió en que
tensión trabajaba cada una de ellas (ver Diagrama n° 6). Y se diseño un
diagrama esquemático, con cada una de las conexiones (ver Diagrama n° 7).
Tabla n° 20 Entradas y Salidas
Entradas Salidas
Pulsador de Encendido (HS 001) Indicador de Encendido (NHS 001)
Pulsador de Parada de Emergencia (Hs 002)
Indicador de Parada de Emergencia (NHS 002)
Sensor de Nivel Alto PVC A (LSH 001) Indicador de Activación de la Bomba A
(NP.002)
Sensor de Nivel Bajo PVC A (LSL 002) Indicador de Activación de la Bomba B
(NP.003)
Sensor de Nivel Alto PVC B (LSH 002) Indicador de Activación de la Bomba C
• Teclado
Sensores
• PIC
Controlador • Pantalla LCD
• Corneta
Actuadores

152
(NP.004)
Sensor de Nivel Bajo PVC B (LSL 003) Indicador de Nivel Bajo del Tanque (NLSL
001)
Sensor de Nivel Alto PVC C (LSH 003) Bomba de Aire PVC A (P.002)
Sensor de Nivel Bajo PVC C (LSL 004) Bomba de Aire PVC A (P.003)
Sensor de Nivel Bajo Tanque (LSL 001) Bomba de Aire PVC A (P.004)
Luz Fluorescente PVC A
Luz Fluorescente PVC B
Luz Fluorescente PVC C
Fuente: Autor
Diagrama n° 6 Diagrama Eléctrico de PLC
Fuente: Autor

153
Diagrama n° 7 Diagrama Esquemático de la Conexión en PLC
Fuente: Autor
El sistema se divide en cuatro partes, la primera es la parte de
aireación, esto se resolvió con una bomba de aire introducida en el tanque de
la solución nutritiva, con la finalidad de que esta bomba se accionara 10
veces al día, lo cual se logro con una rutina de programación para el PLC; la
segunda parte es la de movimiento de nutrientes, que consiste en una
bomba de agua para cada tubo PVC, los cuales cuentan con dos sensores
de nivel, uno de nivel alto y el otro de nivel bajo, cuando se activa el sensor
de nivel bajo, se enciende la bomba de agua, moviendo la solución nutritiva
del tanque al tubo PVC que lo requiera, esta bomba dura encendida hasta
que se active el sensor de nivel alto. La tercera parte engloba la incidencia
de la luz, que consiste en la activación de lámparas de luz fluorescente cada
cierto tiempo y durante cierto tiempo, específicamente cada 12 horas y
durante 12 horas para la lechuga y la acelga, y cada 10 horas y durante 14
horas para el cilantro. Y por último, está la parte del control de nivel de agua,
realizada con los sensores de nivel, que consiste en sondas de plástico, con
una varilla metálica interna, la cual al entran en contacto con el agua trasmite

154
la señal a la entrada del PLC, y hay un sensor de nivel alto y otro de nivel
bajo.
4.9.2 Ejecución del Proceso con PIC
El desarrollo con PIC fue mucho más sencillo, pero no menos
importante, consiste en un pequeño programa, que controla el tiempo que
requiere cada planta para ser cosechada, este tiempo se introduce por medio
de un teclado numérico, y se ve reflejado en una pantalla LCD, cuando el
tiempo llega a cero, se emite una alarma por medio de una corneta (ver
Diagrama n° 8 y Diagrama n° 9).
Diagrama n° 8 Diagrama Eléctrico del PIC
Fuente: Autor

155
Diagrama n° 9 Diagrama Esquemático de PIC
Fuente: Autor
4.9 EVALUAR LA FUNCIONALIDAD DEL SISTEMA EJECUTADO
Analizando todos los resultados dados, y observando todo el
procedimiento del sistema desarrollado, se decretó que era un sistema
funcional, con respecto a la automatización del cultivo hidropónico, ya que
resuelve la problemática antes planteada, disminuyendo el tiempo que
requiere el cultivo por parte de su dueño, sin embargo con respecto a los
costos, que fueron elevados (ver Anexos) se observo, que la aplicación del
controlador lógico programable es más factible, para cultivos un poco más
grandes, ya sea bien para las aplicaciones de agricultura familiar urbana o
para aplicaciones industriales.
No obstante, el uso del PLC permite la ampliación de dicho cultivo, es
decir, que se pueden manejar más de tres cultivos al mismo tiempo, sin la
necesidad de agregar otros dispositivos, se requeriría solamente de
pequeños cambios en la programación del mismo.

156
CONCLUSIONES
Con respecto al método de cultivo hidropónico seleccionado, se puede
concluir, que es un método bastante factible a pequeña, mediana y gran
escala, ya que es muy práctico y sencillo, debido a que no es necesario
realizar varios trasplantes durante el desarrollo de la planta, sino que esta,
puede tener su completo desarrollo en el mismo contenedor, lo que ahorra
tiempo y productos.
Existen una gran variedad de plantas, la mayoría de estas puede ser
cultiva por medio de métodos hidropónicos, todo depende el cuidado que
requiera determinada planta, mientras estos cuidados se realicen como se
deben y en el tiempo que se deben, se pueden obtener grandes y buenas
cosechas, satisfaciendo las necesidades del agricultor o del cultivador.
Para que esto se logre, se requiere de una cantidad de procesos, que
sustituyen, los procesos que brinda la siembra en tierra, por ejemplo la
aireación, debido a que la mayoría de los contenedores son cerrados o
herméticos, las raíces de las plantas no reciben el suficiente oxigeno, por lo
que hay que proporcionárselos de manera manual o automatizada.
Con respecto a los sistemas de control, los cuales incluyen sensores y
actuadores, se puede concluir, que en la actualidad son de muchísima
importancia y de gran utilidad, ya que brindan respuestas a cualquier tipo de
problemática, desde las más pequeñas, como la activación de las luces del
hogar, hasta las más grandes como la automatización de una gran industria.
Si se escogen adecuadamente los sensores, actuadores y controladores, se
puede conseguir elaborar un sistema de control óptimo, que facilite y agilice
determinado proceso, consiguiendo con esto la disminución de costos en
mano de obra, productos y errores humanos.

157
Ahora refiriéndonos a los controladores lógicos programables,
específicamente PLC, se observó que es una herramienta poderosa de
pequeño tamaño, con un lenguaje de programación gráfico, de fácil
entendimiento y desarrollo, con la capacidad de controlar cualquier sistema,
todo depende de la correcta selección del dispositivo. Para esto simplemente
se realiza un estudio de las propiedades cualitativas y cuantitativas que
requiere el sistema que se desea desarrollar.
Por otra parte, el uso de los microcontroladores PIC, también ha ido
aumentando, ya que son minúsculos dispositivos, con la capacidad de
realizar trabajos a gran escala, el lenguaje de programación es un poco más
complicado que el lenguaje escalera, ya que se basa en códigos
computacionales, sin embargo, con un poco de práctica y de estudio, es
fácilmente manejable.
La ciencia de la hidroponía, se convertirá en la agricultura del futuro,
ya que permite grandes cosechas y de muy buena calidad, en menos tiempo
y con menor esfuerzo. No se requiere del uso de suelos, por lo que no es
necesario grandes hectáreas de terreno, para producir grandes cosechas,
con este método se pueden obtener más de 1000 plantas un una pequeña
extensión de 100 m2.
Para finalizar, con el desarrollo de este proyecto, se logró obtener una
gran experiencia tanto en nivel de automatizaciones pequeñas, como a nivel
agrícola. Se logró despertar interés en las compañías visitadas, con respecto
al trabajo realizado, ya que no habían visto la implementación de PLC y PIC,
para cultivos de este tipo. Con pequeños y fáciles programas se logró un
funcionamiento satisfactorio de todo el proceso, tanto en la parte controlada
por PLC, como en la parte controlada por el PIC, lo que llevó a que se
lograra la construcción de un dispositivo completamente funcional para el
desarrollo de cultivos hidropónicos.

158
RECOMENDACIONES
Con respecto al método de cultivo hidropónico, se puede automatizar
cualquiera de estos, sólo hay que adaptarse a las necesidades de la planta y
del método escogido y en base a esto proceder a la automatización, bien sea
enteramente con PLC, con PIC o sencillamente con la combinación de
ambos.
Referente a las plantas, como se mencionó anteriormente, la mayoría
de las plantas pueden ser tranquilamente cultivadas mediante la hidroponia,
así que se puede seleccionar cualquiera de éstas, según el método
seleccionado.
Según la planta seleccionada, se requieren determinados procesos,
pero en general, de la aireación de las raíces, para que éstas se oxigenen,
del movimiento de los nutrientes, para evitar la estanqueidad, y que reciban
luz durante un determinado tiempo, bien sea luz artificial o luz natural.
Con respecto a la selección de los sensores y actuadores, es
recomendable analizar las características cualitativas y cuantitativas, para
determinar de cuales requiere el sistema. Esto es referente conjuntamente,
para la selección del controlador lógico programable (PLC) y para el
microcontrolador PIC.
Referente al diseño y desarrollo de los programas de control, se
recomienda, saber manejar los software de programación y el lenguaje del
mismo, para facilitar el desarrollo de determinado programa.
Y por último, antes de ejecutar el sistema, es recomendable, verificar
que todo se encuentre en orden, es decir, que todo esté en su lugar, y bien
conectado, para evitar fallas o corto circuitos.

159
REFERENCIAS BIBLIOGRÁFICAS
Balestrini, Miriam. 1998. Como se Elabora el Proyecto de Investigación. Editorial Venezuela Analítica Publicaciones. Caracas, VE. 125 págs.
Arias, Fidias. 2006. El Proyecto de Investigación: Introducción a la Metodología Científica. Editorial Episteme. 5ta Edición. Caracas, VE. 120 págs.
IICA (Instituto Interamericano de Cooperación para la Agricultura); CATIE (Centro Agronómico Tropical de Investigación y Enseñanza). 1999. Redacción de Referencias Bibliográfica: Normas Técnicas del IICA y el CATIE. 4ed. Turrialba, CR. Biblioteca Conmemorativa Orton. Vol IV. Tomo V. 40 págs
Martínez, Elena. 2005. Tipos de Investigación: La Investigación Documental. Universidad Metropolitana. Caracas, VE. 152 págs.
Mezones, Y. 1997. Automatización de Máquina Empaquetadora de Granos Mediante el Empleo de PLC (Controlador Lógico Programables). Tesis de Grado para optar por el Título de Ingeniero Electrónico. Caracas, VE. Universidad Nueva Esparta
Organización de Cooperación y Desarrollo Económico. 1993. Manual Frascati. Editorial Fundación Española de Ciencia y Tecnología. Madrid, ES. 232 págs.
Pallás, R. (2004). Sensores y Acondicionadores de Señal. 4ta Ed. Edit. Marcombo
Palella, Santa. Martins, Feliberto. 2006. Metodología de la Investigación Cuantitativa. Editorial Fedeupel. Caracas, VE. 200 págs.

160
REFERENCIAS ELECTRÓNICAS
Alvarado, D; Chávez, F; Wilhelmina, K. 2001. Seminario de Agro Negocios: Lechugas Hidropónicas. (en línea). Perú. Universidad del Pacífico. 96 págs. Consultado 5 abril 2011. Disponible en http://www.upbusiness.net/Upbusiness/docs/mercados/11.pdf
Andrés, G. (2004). Sensores en Robótica. (en línea). Buenos Aires, AR. 10 págs. Consultado 22 junio 2011. Disponible en http://www.todorobot.com.ar/documentos/sensores.pdf
AquaFlash. 2007. Todo Sobre Acuaponia: Práctica en Acuarios. (en línea). Consultado 15 junio 2011. Disponible en http://aquaflash00.blogspot.com/
Arias, Fidias. 1999. El Proyecto de Investigación: Guía para su Elaboración. (en línea). Editorial Episteme. 3era Edición. Caracas, VE. 60 págs. Consultado 30 junio 2011. Disponible en http://www.monografias.com/trabajos-pdf/proyecto-investigacion/proyecto-investigacion.pdf
Biogeodemagallanes. 2003. Sustrato. (en línea). Consultado 15 junio 2011. Disponible en http://biogeodemagallanes.wikispaces.com/3.1.Sustrato
Blog Lechugas Hidropónicas. 2007. Capítulo 1: Almacigos. (en línea). Consultado el 29 mayo 2011. Disponible en http://www.lechugas-hidroponicas.blogspot.com/
C.E.A.R Salva Agro S.A.C. 2010. Sistema de Riego en la Agricultura: Sistema de Riego por Goteo. (en línea). Lima, PE. Concultado 05 junio 2011. Disponible en http://tecnoagronomia.com/tag/aspersion
Cabrero, Julio. Martínez, Miguel. 2000. Diseño de Investigación I. (en línea). Alicante, ES. 25 págs. Consultado 30 junio 2011. Disponible en http://www.aniorte-nic.net/apunt_metod_investigac4_4.htm#Clasificación

161
Calderón, Felipe. Cevallos, Francisco. 2001. Los Sustratos para Hidroponia. (en línea). Bogotá, CO. 60 págs. Consultado 15 junio 2011. Disponible en http://www.drcalderonlabs.com/Publicaciones/Los_Sustratos.htm
Cepeda, Ramone. 1998. Cultivo Hidropónico. (en línea). Salamanca, ES. 77 págs. Consultado el 25 mayo 2011. Disponible en http://html.rincondelvago.com/cultivo-hidroponico.html
Cesaredo, F. 2006. Sistema de Control Mediante Mensajes SMS y Microcontroladores. (en línea). Temuco, CL. 90 págs. Consultado 24 mayo 2011. Disponible en http://biblioteca.uct.cl/tesis/felipe-cser/tesis.pdf
Chávez, Dennis. 2001. Conceptos y Técnicas de Recolección de Datos en la Investigación Jurídico Social. (en línea). Santiago de Chile, CH. 5o págs. Consultado 30 julio 2011. Disponible en http://www.unifr.ch/ddp1/derechopenal/articulos/a_20080521_56.pdf
Ciencia y Agricultura. 2010. Agricultura del Futuro. (en línea). Perú. Consultado 17 mayo 2011. Disponible en http://tecnoagronomia.com/tag/hidroponicos
CNTI (Centro nacional de Tecnologías de Información). 2011. Agricultura. (en línea). Caracas, VE. Consultado 14 abril 2011. Disponible en http://www.gobiernoenlinea.ve/venezuela/perfil_economia1.html#
Creative Commons. 2011. Autómata Programable. (en línea). Consultado 4 abril 2011. Disponible en http://es.wikipedia.org/wiki/Aut%C3%B3mata_programable
Creative Commons. 2011. Hidroponia. (en línea). Consultado 26 abril 2011. Disponible en http://es.wikipedia.org/wiki/Hidropon%C3%ADa#Historia
Creative Commons. 2011. Microcontroladores PIC. (en línea). Consultado 8 mayo 2011. Disponible en http://es.wikipedia.org/wiki/Microcontrolador_PIC

162
Departamento de Agricultura y Comercio de los Estados Unidos. 2003. La Hidroponia. (en línea). New York, US. 30 págs. Consultado 25 mayo 2011. Disponible en http://hidroponia.itgo.com/Hidrop1.htm
Diseño y Arte Mexicano. (2007). Materiales para sus Acabados, Recubrimientos y Jardinería. (en línea). MX. Consultado 20 junio 2011. Disponible en http://www.disenoyartemexicano.mex.tl/
Easy Viajar. 2008. Guía de los Países de Asia. (en línea). Consultado 25 mayo 2011. Disponible en http://www.easyviajar.com/india/la-cueva-sagrada-de-amarnath-cachemira--1591
Figueroa, C. (1998). Maquinaria e Instrumentación Industrial: Actuadores neumáticos, eléctricos e hidráulicos. (en línea). Salamanca, ES. Consultado el 24 junio 2011. Disponible en http://html.rincondelvago.com/actuadores.html
Frino, L. (2004). Introducción a los Microcontroladores. (en línea). Buenos Aires, AR. Consultado 23 junio 2011. Disponible en http://www.frino.com.ar/pdf/micro1.PDF
GCA S.A. (Consultora Ambiental). 1985. Cultivos Hidropónicos: Información Básica Sobre la Hidroponia. (en línea). Buenos Aires, AR. 18 págs. Consultado 25 mayo 2011. Disponible en http://hidroponia.gcaconsultora.com.ar/info_hidrop.html
Henkenius, H. (1992). Como Trabaja un Motor Eléctrico. (en línea). Consultado 25 junio 2011. Disponible en http://www.mimecanicapopular.com/vergral.php?n=180
Hernández, C. (2003). Instrumentación y Comunicaciones Industriales. (en línea). Buenos Aires, AR. Consultado el 23 junio 2011. Disponible en http://www.ing.unlp.edu.ar/electrotecnia/procesos/apuntes/Diagrama%20Escalera.pdf

163
Hernández, L. (2009). La Ciencia es Fácil: Motor Eléctrico. (en línea). Consultado el 25 junio 2011. Disponible en http://electricidad-tekno.blogspot.com/2009/11/motor-electrico.html
Hidroponia Perú. 2005. Cultivos Hidropónicos. (en línea). Consultado 29 mayo 2011. Disponible en http://hidroponiaperu.webs.com/bancales.htm
Hidroponias Venezuela. 1972. Historia de la Hidroponia. (en línea). Miranda, VE. Consultado 14 abril 2011. Disponible en http://www.hidroponiasvenezolanas.com/historia.asp
Hortgrow. 2007. Sistemas de Cultivo: Cultivos Técnicos de Floración. (en línea). Consultado 29 mayo 2011. Disponible en http://hortgrow.host22.com/1_18_Sistemas-de-cultivo.html
Industrias Omrom. (2003). Automatización Industrial. (en línea). ES. Consultado 20 junio 2011. Disponible en: http://industrial.omron.es/es/products/catalogue/sensing/inductive_sensors/special_models/e2c_eda/default.html
Hydro Environment. 2003. Guía para el Cultivo de Lechuga Hidropónica:
Germinación. (en línea). Consultado 29 mayo 2011. Disponible en http://www.hydroenvironment.com.mx/catalogo/index.php?main_page=page&id=84
Infoagro. 2005. Tipos de Sustratos de Cultivo. (en línea). 2 págs. Consultado 05 junio 2011. Disponible en http://www.infoagro.com/industria_auxiliar/tipo_sustratos.htm
Ing. Caldeyro, M. 2007. La Hidroponia Simplificada como Tecnología Apropiada para Implementar la Seguridad Alimentaria en la Agricultura Urbana. (en línea). Australia. 6 págs. Consultado 17 mayo 2011. Disponible en http://www3.telus.net/public/a6a47567/Alimentaria.pdf

164
Jardineria.pro. 2004. Cuidado y Trasplante de Plántulas en Almacigos. (en línea). Consultado 30 mayo 2011. Disponible en http://www.jardineria.pro/tag/almacigo
Jardineria.pro. 2004. Trucos para Sembrar Semillas con Éxito. (en línea). Consultado 30 mayo 2011. Disponible en http://www.jardineria.pro/tag/almacigo
Lagares, Paula. 2001. Población y Muestra: Técnicas de Muestreo. (en línea). Sevilla. ES. 20 págs. Consultado 30 junio 2011. Disponible en http://optimierung.mathematik.uni-kl.de/mamaeusch/veroeffentlichungen/ver_texte/sampling_es.pdf
Llanos, P. (2001). Formulaciones Comerciales, Formulas Completas. (en línea). Bogotá, CO. 15 págs. Consultado 20 junio 2011. Disponible en http://www.drcalderonlabs.com/Hidroponicos/Soluciones1.html
OCTELCA (Soluciones de Telemedicina, Tecnología de Salud y Energía Eléctrica). (2010). Marcas. (en línea). Consultado 23 junio 2011. Disponible en http://octelca.com/index_prueba_marcas.html
Oficina Regional de la FAO para América Latina y el Caribe. 1998. Consultado 24 mayo 2011. Disponible en http://www.rlc.fao.org/
Oficina Regional de la FAO para América Latina y el Caribe. 2003. Manual de Hidroponia Popular, Una Necesidad. (en línea). 3ed. Santiago, CL. 180 págs. Consultado 26 abril 2011. Disponible en http://www.elmejorguia.com/hidroponia/Manual%20de%20hidroponia.htm
Oficina Regional de la FAO para América Latina y el Caribe. 2003. Manual de Hidroponia Popular, Una Necesidad. (en línea). 3ed. Santiago, CL. 180 págs. Consultado 29 mayo 2011. Disponible en http://www.elmejorguia.com/hidroponia/Tallo.htm
Oficina Regional de la FAO para América Latina y el Caribe. 2003. Manual de Hidroponia Popular, Una Necesidad. (en línea). 3ed. Santiago, CL.

165
180 págs. Consultado 29 mayo 2011. Disponible en http://www.elmejorguia.com/hidroponia/Sistemas.htm
Oficina Regional de la FAO para América Latina y el Caribe. 2003. Manual de Hidroponia Popular, Una Necesidad. (en línea). 3ed. Santiago, CL. 180 págs. Consultado 29 mayo 2011. Disponible en http://hidroponiafotos.awardspace.com/Foto_manga_vertical_hidroponica.htm
Oficina Regional de la FAO para América Latina y el Caribe. 2005. ¿Qué es la Hidroponia?. (en línea). Santiago, CL. 5 págs. Consultado 24 mayo 2011. Disponible en http://www.elmejorguia.com/hidroponia/Que_es_hidroponia.htm
Quiñones, E. (2007). Horizonte Eléctrico. (en línea). Consultado 25 junio 2011. Disponible en http://www.blogelectronico.com/page/36/
Rincón, J. (2005). Manual de Microcontroladores PIC. (en línea). MX. Consultado 23 junio 2011. Disponible en http://lc.fie.umich.mx/~jrincon/manual%20PICs%20Ruddy.pdf
Rojas, Sean. 2009. Procesamiento y Análisis de Datos. (en línea). CO. Consultado 30 julio 2011. Disponible en http://www.buendato.com/profiles/blogs/procesamiento-y-analisis-de
Santander, F. 2007. El Cultivo de Tomates Hidropónicos. (en línea). Buenos Aires, AR. 15 págs. Consultado 17 mayo 2011. Disponible en http://www.monografias.com/trabajos40/tomates-hidroponicos/tomates-hidroponicos.shtml
Sanz, A. Font, O. (2010). Sistema de Control Basado en Microcontrolador. (en línea). Universidad Politécnica de Catalunya. Barcelona, ES. 150 págs. Consultado el 21 junio 2011. Disponible en http://upcommons.upc.edu/pfc/bitstream/2099.1/3330/5/34059-5.pdf
Siemens. (2002). Productos: Sistemas de Automatización. (en línea). Condultado 23 junio 2011. Disponible en http://www.siemens.com/answers/co/es/index.htm?stc=veccc020001

166
Vidósola, E. (2006). Actuadores. (en línea). Santiago de Chile, CL. Consultado 24 junio 2011. Disponible en http://www.aie.cl/files/file/comites/ca/abc/actuadores.pdf
Web de Ejercitos del Mundo. 2011. Incidentes OTAN - URSS. (en línea). Consultado 26 mayo 2011. Disponible en http://www.ejercitos.org/viewtopic.php?f=20&t=42&start=20
Web de la Fundación Nuestro Mar. 2008. Petróleo: Inglaterra Quiere Extenderse en Malvinas. (en línea). Consultado 26 mayo 2011. Disponible en http://www.nuestromar.org/noticias/politica_y_economia_082008_18446_petroleo_inglaterra_quiere_extenderse_en_malvina
Zubia, Iban. (2001). Curso Básico de Autómatas Programables. (en línea). ES. Consultado 23 junio 2011. Disponible en: http://www.sc.ehu.es/sbweb/webcentro/automatica/WebCQMH1/PAGINA%20PRINCIPAL/index.htm

167
Anexos

168
ANEXOS A CARTAS Y CONSTANCIAS
Anexos A. 1 Carta de Aceptación de la Tutoría
Fuente: Autor

169
Anexos A. 2 Carta de Autorización de Entrega de Tesis
Fuente: Autor

170
Anexos A. 3 Constancia de Validación de Instrumentos
Fuente: Autor

171
ANEXOS B INSTRUMENTOS DE RECOLECIÓN DE DATOS
Anexos B. 1 Cuestionario

172

173
Fuente: Autor

174
Anexos B. 2 Observación de Cableado Estructurado en Empresas PUIG
Fuente: Autor
Anexos B. 3 Observación de un Sistema de Bombeo en la USB
Fuente: Autor

175
Anexos B. 4 Observación de la Conexión del PLC, en el Sistema de Bombeo de la USB
Fuente: Autor

176
ANEXOS C COTIZACIONES
Anexos C. 1 Cotización n° 118207 de Servieleca
Fuente: Autor

177
Anexos C. 2 Cotización n° 118720 de Servieleca
Fuente: Autor

178
ANEXOS D FACTURAS
Anexos D. 1 Factura n° 101308 Servieleca
Fuente: Autor

179
Anexos D. 2 Factura n° 101171 Servieleca
Fuente: Autor

180
Anexos D. 3 Factura n° 101303 Servieleca
Fuente: Autor

181
Anexos D. 4 Factura n° 101009 Servieleca
Fuente: Autor

182
Anexos D. 5 Factura n° 2131
Fuente: Autor
Related Documents











