Delayed feedback control of Delayed feedback control of chaos: bifurcation analysis chaos: bifurcation analysis N. Janson (Loughborough) N. Janson (Loughborough) Collaborators: A. Balanov and E. Collaborators: A. Balanov and E. Sch Sch öll (TUB) öll (TUB) Technische Universit Technische Universit ät ät Berlin Berlin Loughborough University Loughborough University

Delayed feedback control of chaos: bifurcation analysis N. Janson (Loughborough) Collaborators: A. Balanov and E. Schöll (TUB) Technische Universität Berlin.
Mar 28, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
Methods for control of deterministicMethods for control of deterministic chaoschaos
bull a continuous external perturbation R Lima et al Phys Rev A 41 (1990) 726
bull a time-discrete conditioned perturbation (OGY) E Ott et al Phys Rev Lett 64 (1990) 1196
bull delayed feedback loop K Pyragas Phys Lett A 170 (1992) 421
bull a continuous external perturbation R Lima et al Phys Rev A 41 (1990) 726
bull a time-discrete conditioned perturbation (OGY) E Ott et al Phys Rev Lett 64 (1990) 1196
bull delayed feedback loop K Pyragas Phys Lett A 170 (1992) 421
Three main methodsThree main methods
Delayed feedback control of chaosDelayed feedback control of chaos
)()( txtxK minusτminus
ττ==ττ=T=T
How does it workHow does it work
Chaos control Example IChaos control Example I
S Bielawski et al Phys Rev E 49 (1994) R971S Bielawski et al Phys Rev E 49 (1994) R971
CO2 laserCO2 laser
without controlwithout control
with controlwith control
EXPERIMENTEXPERIMENT
Electrochemical oscillatorsElectrochemical oscillators
P Paramanade et al Phys Rev E 59 (1999) 5266P Paramanade et al Phys Rev E 59 (1999) 5266
control
no control no control
Chaos control Example IIChaos control Example II
EXPERIMENTEXPERIMENT
Chaos control Example IIIChaos control Example III
NUMERICAL RESULTSNUMERICAL RESULTS
G FranceschiniG Franceschini et al Phys Rev E 60 (1999) 5426 et al Phys Rev E 60 (1999) 5426
Semiconductor structureSemiconductor structure
no control
control
Chaos control Example IVChaos control Example IV
EXPERIMENTEXPERIMENT
C Beta et al Phys Rev E 67 (2003) 046224C Beta et al Phys Rev E 67 (2003) 046224
Catalytic CO oxidation on platinumCatalytic CO oxidation on platinum
controlno control
Delayed feedback control of chaos main known factsDelayed feedback control of chaos main known facts
(more than 700 citations)(more than 700 citations)K Pyragas Phys Lett A 170K Pyragas Phys Lett A 170 421 421 (1992) (1992)
1) At fixed τ=T there is a range of K for which the orbit is stabilized2) Orbits with an odd number of Floquet multipliers greater than 1 cannot be stabilized 3) Feedback can induce multistability and death of oscillations
ME Bleich et al Phys Lett A 210 87 (1996) ME Bleich et al Phys Lett A 210 87 (1996) W Just et al Phys Rev Lett 203 78 (1997) W Just et al Phys Rev Lett 203 78 (1997) H Nakajima Phys Lett A 232 H Nakajima Phys Lett A 232 207 (1997) 207 (1997) W Just et al Phys Lett A 254 158 (1999)W Just et al Phys Lett A 254 158 (1999)
limitations of delayed feedbacklimitations of delayed feedback
W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998)What if τ is not exactly equal to T but close to it
1) The orbit changes its shape and period 2) A method to estimate the orbit period from the given two values of τ
General bifurcation picture in the General bifurcation picture in the plane plane
of parameters of delayed feedbackof parameters of delayed feedbackK - K - ττ
)( mxzbz
ayxy
zyx
minus+=+=minusminus=
amp
amp
amp
System for the studySystem for the study
RRoumloumlssler systemssler system
a=02 b=02 m=65a=02 b=02 m=65
period-one limit cycleperiod-one limit cycleperiod-two limit cycleperiod-two limit cycle
Unstable orbitsUnstable orbits
euro
+K(x(t minus τ) minus x)
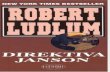
Bifurcation diagram (main result)Bifurcation diagram (main result)
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Multistability and hysteretic transitions Multistability and hysteretic transitions
1D bifurcation diagrams1D bifurcation diagrams
Multistability and hysteretic transitions Multistability and hysteretic transitions
Control forceControl force ττ increasesincreases
ττ decreasesdecreases
General structure of bifurcation diagramGeneral structure of bifurcation diagram
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Hopf bifurcation
stable fixed point
Multi-leaf structureMulti-leaf structureSize of period-1 orbit
Orbit is stable
Orbit is unstable
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 0Bifurcation diagram Leaf 0
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Methods for control of deterministicMethods for control of deterministic chaoschaos
bull a continuous external perturbation R Lima et al Phys Rev A 41 (1990) 726
bull a time-discrete conditioned perturbation (OGY) E Ott et al Phys Rev Lett 64 (1990) 1196
bull delayed feedback loop K Pyragas Phys Lett A 170 (1992) 421
bull a continuous external perturbation R Lima et al Phys Rev A 41 (1990) 726
bull a time-discrete conditioned perturbation (OGY) E Ott et al Phys Rev Lett 64 (1990) 1196
bull delayed feedback loop K Pyragas Phys Lett A 170 (1992) 421
Three main methodsThree main methods
Delayed feedback control of chaosDelayed feedback control of chaos
)()( txtxK minusτminus
ττ==ττ=T=T
How does it workHow does it work
Chaos control Example IChaos control Example I
S Bielawski et al Phys Rev E 49 (1994) R971S Bielawski et al Phys Rev E 49 (1994) R971
CO2 laserCO2 laser
without controlwithout control
with controlwith control
EXPERIMENTEXPERIMENT
Electrochemical oscillatorsElectrochemical oscillators
P Paramanade et al Phys Rev E 59 (1999) 5266P Paramanade et al Phys Rev E 59 (1999) 5266
control
no control no control
Chaos control Example IIChaos control Example II
EXPERIMENTEXPERIMENT
Chaos control Example IIIChaos control Example III
NUMERICAL RESULTSNUMERICAL RESULTS
G FranceschiniG Franceschini et al Phys Rev E 60 (1999) 5426 et al Phys Rev E 60 (1999) 5426
Semiconductor structureSemiconductor structure
no control
control
Chaos control Example IVChaos control Example IV
EXPERIMENTEXPERIMENT
C Beta et al Phys Rev E 67 (2003) 046224C Beta et al Phys Rev E 67 (2003) 046224
Catalytic CO oxidation on platinumCatalytic CO oxidation on platinum
controlno control
Delayed feedback control of chaos main known factsDelayed feedback control of chaos main known facts
(more than 700 citations)(more than 700 citations)K Pyragas Phys Lett A 170K Pyragas Phys Lett A 170 421 421 (1992) (1992)
1) At fixed τ=T there is a range of K for which the orbit is stabilized2) Orbits with an odd number of Floquet multipliers greater than 1 cannot be stabilized 3) Feedback can induce multistability and death of oscillations
ME Bleich et al Phys Lett A 210 87 (1996) ME Bleich et al Phys Lett A 210 87 (1996) W Just et al Phys Rev Lett 203 78 (1997) W Just et al Phys Rev Lett 203 78 (1997) H Nakajima Phys Lett A 232 H Nakajima Phys Lett A 232 207 (1997) 207 (1997) W Just et al Phys Lett A 254 158 (1999)W Just et al Phys Lett A 254 158 (1999)
limitations of delayed feedbacklimitations of delayed feedback
W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998)What if τ is not exactly equal to T but close to it
1) The orbit changes its shape and period 2) A method to estimate the orbit period from the given two values of τ
General bifurcation picture in the General bifurcation picture in the plane plane
of parameters of delayed feedbackof parameters of delayed feedbackK - K - ττ
)( mxzbz
ayxy
zyx
minus+=+=minusminus=
amp
amp
amp
System for the studySystem for the study
RRoumloumlssler systemssler system
a=02 b=02 m=65a=02 b=02 m=65
period-one limit cycleperiod-one limit cycleperiod-two limit cycleperiod-two limit cycle
Unstable orbitsUnstable orbits
euro
+K(x(t minus τ) minus x)
Bifurcation diagram (main result)Bifurcation diagram (main result)
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Multistability and hysteretic transitions Multistability and hysteretic transitions
1D bifurcation diagrams1D bifurcation diagrams
Multistability and hysteretic transitions Multistability and hysteretic transitions
Control forceControl force ττ increasesincreases
ττ decreasesdecreases
General structure of bifurcation diagramGeneral structure of bifurcation diagram
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Hopf bifurcation
stable fixed point
Multi-leaf structureMulti-leaf structureSize of period-1 orbit
Orbit is stable
Orbit is unstable
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 0Bifurcation diagram Leaf 0
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Delayed feedback control of chaosDelayed feedback control of chaos
)()( txtxK minusτminus
ττ==ττ=T=T
How does it workHow does it work
Chaos control Example IChaos control Example I
S Bielawski et al Phys Rev E 49 (1994) R971S Bielawski et al Phys Rev E 49 (1994) R971
CO2 laserCO2 laser
without controlwithout control
with controlwith control
EXPERIMENTEXPERIMENT
Electrochemical oscillatorsElectrochemical oscillators
P Paramanade et al Phys Rev E 59 (1999) 5266P Paramanade et al Phys Rev E 59 (1999) 5266
control
no control no control
Chaos control Example IIChaos control Example II
EXPERIMENTEXPERIMENT
Chaos control Example IIIChaos control Example III
NUMERICAL RESULTSNUMERICAL RESULTS
G FranceschiniG Franceschini et al Phys Rev E 60 (1999) 5426 et al Phys Rev E 60 (1999) 5426
Semiconductor structureSemiconductor structure
no control
control
Chaos control Example IVChaos control Example IV
EXPERIMENTEXPERIMENT
C Beta et al Phys Rev E 67 (2003) 046224C Beta et al Phys Rev E 67 (2003) 046224
Catalytic CO oxidation on platinumCatalytic CO oxidation on platinum
controlno control
Delayed feedback control of chaos main known factsDelayed feedback control of chaos main known facts
(more than 700 citations)(more than 700 citations)K Pyragas Phys Lett A 170K Pyragas Phys Lett A 170 421 421 (1992) (1992)
1) At fixed τ=T there is a range of K for which the orbit is stabilized2) Orbits with an odd number of Floquet multipliers greater than 1 cannot be stabilized 3) Feedback can induce multistability and death of oscillations
ME Bleich et al Phys Lett A 210 87 (1996) ME Bleich et al Phys Lett A 210 87 (1996) W Just et al Phys Rev Lett 203 78 (1997) W Just et al Phys Rev Lett 203 78 (1997) H Nakajima Phys Lett A 232 H Nakajima Phys Lett A 232 207 (1997) 207 (1997) W Just et al Phys Lett A 254 158 (1999)W Just et al Phys Lett A 254 158 (1999)
limitations of delayed feedbacklimitations of delayed feedback
W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998)What if τ is not exactly equal to T but close to it
1) The orbit changes its shape and period 2) A method to estimate the orbit period from the given two values of τ
General bifurcation picture in the General bifurcation picture in the plane plane
of parameters of delayed feedbackof parameters of delayed feedbackK - K - ττ
)( mxzbz
ayxy
zyx
minus+=+=minusminus=
amp
amp
amp
System for the studySystem for the study
RRoumloumlssler systemssler system
a=02 b=02 m=65a=02 b=02 m=65
period-one limit cycleperiod-one limit cycleperiod-two limit cycleperiod-two limit cycle
Unstable orbitsUnstable orbits
euro
+K(x(t minus τ) minus x)
Bifurcation diagram (main result)Bifurcation diagram (main result)
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Multistability and hysteretic transitions Multistability and hysteretic transitions
1D bifurcation diagrams1D bifurcation diagrams
Multistability and hysteretic transitions Multistability and hysteretic transitions
Control forceControl force ττ increasesincreases
ττ decreasesdecreases
General structure of bifurcation diagramGeneral structure of bifurcation diagram
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Hopf bifurcation
stable fixed point
Multi-leaf structureMulti-leaf structureSize of period-1 orbit
Orbit is stable
Orbit is unstable
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 0Bifurcation diagram Leaf 0
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Chaos control Example IChaos control Example I
S Bielawski et al Phys Rev E 49 (1994) R971S Bielawski et al Phys Rev E 49 (1994) R971
CO2 laserCO2 laser
without controlwithout control
with controlwith control
EXPERIMENTEXPERIMENT
Electrochemical oscillatorsElectrochemical oscillators
P Paramanade et al Phys Rev E 59 (1999) 5266P Paramanade et al Phys Rev E 59 (1999) 5266
control
no control no control
Chaos control Example IIChaos control Example II
EXPERIMENTEXPERIMENT
Chaos control Example IIIChaos control Example III
NUMERICAL RESULTSNUMERICAL RESULTS
G FranceschiniG Franceschini et al Phys Rev E 60 (1999) 5426 et al Phys Rev E 60 (1999) 5426
Semiconductor structureSemiconductor structure
no control
control
Chaos control Example IVChaos control Example IV
EXPERIMENTEXPERIMENT
C Beta et al Phys Rev E 67 (2003) 046224C Beta et al Phys Rev E 67 (2003) 046224
Catalytic CO oxidation on platinumCatalytic CO oxidation on platinum
controlno control
Delayed feedback control of chaos main known factsDelayed feedback control of chaos main known facts
(more than 700 citations)(more than 700 citations)K Pyragas Phys Lett A 170K Pyragas Phys Lett A 170 421 421 (1992) (1992)
1) At fixed τ=T there is a range of K for which the orbit is stabilized2) Orbits with an odd number of Floquet multipliers greater than 1 cannot be stabilized 3) Feedback can induce multistability and death of oscillations
ME Bleich et al Phys Lett A 210 87 (1996) ME Bleich et al Phys Lett A 210 87 (1996) W Just et al Phys Rev Lett 203 78 (1997) W Just et al Phys Rev Lett 203 78 (1997) H Nakajima Phys Lett A 232 H Nakajima Phys Lett A 232 207 (1997) 207 (1997) W Just et al Phys Lett A 254 158 (1999)W Just et al Phys Lett A 254 158 (1999)
limitations of delayed feedbacklimitations of delayed feedback
W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998)What if τ is not exactly equal to T but close to it
1) The orbit changes its shape and period 2) A method to estimate the orbit period from the given two values of τ
General bifurcation picture in the General bifurcation picture in the plane plane
of parameters of delayed feedbackof parameters of delayed feedbackK - K - ττ
)( mxzbz
ayxy
zyx
minus+=+=minusminus=
amp
amp
amp
System for the studySystem for the study
RRoumloumlssler systemssler system
a=02 b=02 m=65a=02 b=02 m=65
period-one limit cycleperiod-one limit cycleperiod-two limit cycleperiod-two limit cycle
Unstable orbitsUnstable orbits
euro
+K(x(t minus τ) minus x)
Bifurcation diagram (main result)Bifurcation diagram (main result)
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Multistability and hysteretic transitions Multistability and hysteretic transitions
1D bifurcation diagrams1D bifurcation diagrams
Multistability and hysteretic transitions Multistability and hysteretic transitions
Control forceControl force ττ increasesincreases
ττ decreasesdecreases
General structure of bifurcation diagramGeneral structure of bifurcation diagram
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Hopf bifurcation
stable fixed point
Multi-leaf structureMulti-leaf structureSize of period-1 orbit
Orbit is stable
Orbit is unstable
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 0Bifurcation diagram Leaf 0
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Electrochemical oscillatorsElectrochemical oscillators
P Paramanade et al Phys Rev E 59 (1999) 5266P Paramanade et al Phys Rev E 59 (1999) 5266
control
no control no control
Chaos control Example IIChaos control Example II
EXPERIMENTEXPERIMENT
Chaos control Example IIIChaos control Example III
NUMERICAL RESULTSNUMERICAL RESULTS
G FranceschiniG Franceschini et al Phys Rev E 60 (1999) 5426 et al Phys Rev E 60 (1999) 5426
Semiconductor structureSemiconductor structure
no control
control
Chaos control Example IVChaos control Example IV
EXPERIMENTEXPERIMENT
C Beta et al Phys Rev E 67 (2003) 046224C Beta et al Phys Rev E 67 (2003) 046224
Catalytic CO oxidation on platinumCatalytic CO oxidation on platinum
controlno control
Delayed feedback control of chaos main known factsDelayed feedback control of chaos main known facts
(more than 700 citations)(more than 700 citations)K Pyragas Phys Lett A 170K Pyragas Phys Lett A 170 421 421 (1992) (1992)
1) At fixed τ=T there is a range of K for which the orbit is stabilized2) Orbits with an odd number of Floquet multipliers greater than 1 cannot be stabilized 3) Feedback can induce multistability and death of oscillations
ME Bleich et al Phys Lett A 210 87 (1996) ME Bleich et al Phys Lett A 210 87 (1996) W Just et al Phys Rev Lett 203 78 (1997) W Just et al Phys Rev Lett 203 78 (1997) H Nakajima Phys Lett A 232 H Nakajima Phys Lett A 232 207 (1997) 207 (1997) W Just et al Phys Lett A 254 158 (1999)W Just et al Phys Lett A 254 158 (1999)
limitations of delayed feedbacklimitations of delayed feedback
W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998)What if τ is not exactly equal to T but close to it
1) The orbit changes its shape and period 2) A method to estimate the orbit period from the given two values of τ
General bifurcation picture in the General bifurcation picture in the plane plane
of parameters of delayed feedbackof parameters of delayed feedbackK - K - ττ
)( mxzbz
ayxy
zyx
minus+=+=minusminus=
amp
amp
amp
System for the studySystem for the study
RRoumloumlssler systemssler system
a=02 b=02 m=65a=02 b=02 m=65
period-one limit cycleperiod-one limit cycleperiod-two limit cycleperiod-two limit cycle
Unstable orbitsUnstable orbits
euro
+K(x(t minus τ) minus x)
Bifurcation diagram (main result)Bifurcation diagram (main result)
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Multistability and hysteretic transitions Multistability and hysteretic transitions
1D bifurcation diagrams1D bifurcation diagrams
Multistability and hysteretic transitions Multistability and hysteretic transitions
Control forceControl force ττ increasesincreases
ττ decreasesdecreases
General structure of bifurcation diagramGeneral structure of bifurcation diagram
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Hopf bifurcation
stable fixed point
Multi-leaf structureMulti-leaf structureSize of period-1 orbit
Orbit is stable
Orbit is unstable
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 0Bifurcation diagram Leaf 0
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Chaos control Example IIIChaos control Example III
NUMERICAL RESULTSNUMERICAL RESULTS
G FranceschiniG Franceschini et al Phys Rev E 60 (1999) 5426 et al Phys Rev E 60 (1999) 5426
Semiconductor structureSemiconductor structure
no control
control
Chaos control Example IVChaos control Example IV
EXPERIMENTEXPERIMENT
C Beta et al Phys Rev E 67 (2003) 046224C Beta et al Phys Rev E 67 (2003) 046224
Catalytic CO oxidation on platinumCatalytic CO oxidation on platinum
controlno control
Delayed feedback control of chaos main known factsDelayed feedback control of chaos main known facts
(more than 700 citations)(more than 700 citations)K Pyragas Phys Lett A 170K Pyragas Phys Lett A 170 421 421 (1992) (1992)
1) At fixed τ=T there is a range of K for which the orbit is stabilized2) Orbits with an odd number of Floquet multipliers greater than 1 cannot be stabilized 3) Feedback can induce multistability and death of oscillations
ME Bleich et al Phys Lett A 210 87 (1996) ME Bleich et al Phys Lett A 210 87 (1996) W Just et al Phys Rev Lett 203 78 (1997) W Just et al Phys Rev Lett 203 78 (1997) H Nakajima Phys Lett A 232 H Nakajima Phys Lett A 232 207 (1997) 207 (1997) W Just et al Phys Lett A 254 158 (1999)W Just et al Phys Lett A 254 158 (1999)
limitations of delayed feedbacklimitations of delayed feedback
W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998)What if τ is not exactly equal to T but close to it
1) The orbit changes its shape and period 2) A method to estimate the orbit period from the given two values of τ
General bifurcation picture in the General bifurcation picture in the plane plane
of parameters of delayed feedbackof parameters of delayed feedbackK - K - ττ
)( mxzbz
ayxy
zyx
minus+=+=minusminus=
amp
amp
amp
System for the studySystem for the study
RRoumloumlssler systemssler system
a=02 b=02 m=65a=02 b=02 m=65
period-one limit cycleperiod-one limit cycleperiod-two limit cycleperiod-two limit cycle
Unstable orbitsUnstable orbits
euro
+K(x(t minus τ) minus x)
Bifurcation diagram (main result)Bifurcation diagram (main result)
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Multistability and hysteretic transitions Multistability and hysteretic transitions
1D bifurcation diagrams1D bifurcation diagrams
Multistability and hysteretic transitions Multistability and hysteretic transitions
Control forceControl force ττ increasesincreases
ττ decreasesdecreases
General structure of bifurcation diagramGeneral structure of bifurcation diagram
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Hopf bifurcation
stable fixed point
Multi-leaf structureMulti-leaf structureSize of period-1 orbit
Orbit is stable
Orbit is unstable
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 0Bifurcation diagram Leaf 0
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Chaos control Example IVChaos control Example IV
EXPERIMENTEXPERIMENT
C Beta et al Phys Rev E 67 (2003) 046224C Beta et al Phys Rev E 67 (2003) 046224
Catalytic CO oxidation on platinumCatalytic CO oxidation on platinum
controlno control
Delayed feedback control of chaos main known factsDelayed feedback control of chaos main known facts
(more than 700 citations)(more than 700 citations)K Pyragas Phys Lett A 170K Pyragas Phys Lett A 170 421 421 (1992) (1992)
1) At fixed τ=T there is a range of K for which the orbit is stabilized2) Orbits with an odd number of Floquet multipliers greater than 1 cannot be stabilized 3) Feedback can induce multistability and death of oscillations
ME Bleich et al Phys Lett A 210 87 (1996) ME Bleich et al Phys Lett A 210 87 (1996) W Just et al Phys Rev Lett 203 78 (1997) W Just et al Phys Rev Lett 203 78 (1997) H Nakajima Phys Lett A 232 H Nakajima Phys Lett A 232 207 (1997) 207 (1997) W Just et al Phys Lett A 254 158 (1999)W Just et al Phys Lett A 254 158 (1999)
limitations of delayed feedbacklimitations of delayed feedback
W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998)What if τ is not exactly equal to T but close to it
1) The orbit changes its shape and period 2) A method to estimate the orbit period from the given two values of τ
General bifurcation picture in the General bifurcation picture in the plane plane
of parameters of delayed feedbackof parameters of delayed feedbackK - K - ττ
)( mxzbz
ayxy
zyx
minus+=+=minusminus=
amp
amp
amp
System for the studySystem for the study
RRoumloumlssler systemssler system
a=02 b=02 m=65a=02 b=02 m=65
period-one limit cycleperiod-one limit cycleperiod-two limit cycleperiod-two limit cycle
Unstable orbitsUnstable orbits
euro
+K(x(t minus τ) minus x)
Bifurcation diagram (main result)Bifurcation diagram (main result)
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Multistability and hysteretic transitions Multistability and hysteretic transitions
1D bifurcation diagrams1D bifurcation diagrams
Multistability and hysteretic transitions Multistability and hysteretic transitions
Control forceControl force ττ increasesincreases
ττ decreasesdecreases
General structure of bifurcation diagramGeneral structure of bifurcation diagram
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Hopf bifurcation
stable fixed point
Multi-leaf structureMulti-leaf structureSize of period-1 orbit
Orbit is stable
Orbit is unstable
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 0Bifurcation diagram Leaf 0
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Delayed feedback control of chaos main known factsDelayed feedback control of chaos main known facts
(more than 700 citations)(more than 700 citations)K Pyragas Phys Lett A 170K Pyragas Phys Lett A 170 421 421 (1992) (1992)
1) At fixed τ=T there is a range of K for which the orbit is stabilized2) Orbits with an odd number of Floquet multipliers greater than 1 cannot be stabilized 3) Feedback can induce multistability and death of oscillations
ME Bleich et al Phys Lett A 210 87 (1996) ME Bleich et al Phys Lett A 210 87 (1996) W Just et al Phys Rev Lett 203 78 (1997) W Just et al Phys Rev Lett 203 78 (1997) H Nakajima Phys Lett A 232 H Nakajima Phys Lett A 232 207 (1997) 207 (1997) W Just et al Phys Lett A 254 158 (1999)W Just et al Phys Lett A 254 158 (1999)
limitations of delayed feedbacklimitations of delayed feedback
W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998)What if τ is not exactly equal to T but close to it
1) The orbit changes its shape and period 2) A method to estimate the orbit period from the given two values of τ
General bifurcation picture in the General bifurcation picture in the plane plane
of parameters of delayed feedbackof parameters of delayed feedbackK - K - ττ
)( mxzbz
ayxy
zyx
minus+=+=minusminus=
amp
amp
amp
System for the studySystem for the study
RRoumloumlssler systemssler system
a=02 b=02 m=65a=02 b=02 m=65
period-one limit cycleperiod-one limit cycleperiod-two limit cycleperiod-two limit cycle
Unstable orbitsUnstable orbits
euro
+K(x(t minus τ) minus x)
Bifurcation diagram (main result)Bifurcation diagram (main result)
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Multistability and hysteretic transitions Multistability and hysteretic transitions
1D bifurcation diagrams1D bifurcation diagrams
Multistability and hysteretic transitions Multistability and hysteretic transitions
Control forceControl force ττ increasesincreases
ττ decreasesdecreases
General structure of bifurcation diagramGeneral structure of bifurcation diagram
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Hopf bifurcation
stable fixed point
Multi-leaf structureMulti-leaf structureSize of period-1 orbit
Orbit is stable
Orbit is unstable
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 0Bifurcation diagram Leaf 0
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

General bifurcation picture in the General bifurcation picture in the plane plane
of parameters of delayed feedbackof parameters of delayed feedbackK - K - ττ
)( mxzbz
ayxy
zyx
minus+=+=minusminus=
amp
amp
amp
System for the studySystem for the study
RRoumloumlssler systemssler system
a=02 b=02 m=65a=02 b=02 m=65
period-one limit cycleperiod-one limit cycleperiod-two limit cycleperiod-two limit cycle
Unstable orbitsUnstable orbits
euro
+K(x(t minus τ) minus x)
Bifurcation diagram (main result)Bifurcation diagram (main result)
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Multistability and hysteretic transitions Multistability and hysteretic transitions
1D bifurcation diagrams1D bifurcation diagrams
Multistability and hysteretic transitions Multistability and hysteretic transitions
Control forceControl force ττ increasesincreases
ττ decreasesdecreases
General structure of bifurcation diagramGeneral structure of bifurcation diagram
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Hopf bifurcation
stable fixed point
Multi-leaf structureMulti-leaf structureSize of period-1 orbit
Orbit is stable
Orbit is unstable
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 0Bifurcation diagram Leaf 0
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

)( mxzbz
ayxy
zyx
minus+=+=minusminus=
amp
amp
amp
System for the studySystem for the study
RRoumloumlssler systemssler system
a=02 b=02 m=65a=02 b=02 m=65
period-one limit cycleperiod-one limit cycleperiod-two limit cycleperiod-two limit cycle
Unstable orbitsUnstable orbits
euro
+K(x(t minus τ) minus x)
Bifurcation diagram (main result)Bifurcation diagram (main result)
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Multistability and hysteretic transitions Multistability and hysteretic transitions
1D bifurcation diagrams1D bifurcation diagrams
Multistability and hysteretic transitions Multistability and hysteretic transitions
Control forceControl force ττ increasesincreases
ττ decreasesdecreases
General structure of bifurcation diagramGeneral structure of bifurcation diagram
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Hopf bifurcation
stable fixed point
Multi-leaf structureMulti-leaf structureSize of period-1 orbit
Orbit is stable
Orbit is unstable
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 0Bifurcation diagram Leaf 0
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Bifurcation diagram (main result)Bifurcation diagram (main result)
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Multistability and hysteretic transitions Multistability and hysteretic transitions
1D bifurcation diagrams1D bifurcation diagrams
Multistability and hysteretic transitions Multistability and hysteretic transitions
Control forceControl force ττ increasesincreases
ττ decreasesdecreases
General structure of bifurcation diagramGeneral structure of bifurcation diagram
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Hopf bifurcation
stable fixed point
Multi-leaf structureMulti-leaf structureSize of period-1 orbit
Orbit is stable
Orbit is unstable
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 0Bifurcation diagram Leaf 0
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Multistability and hysteretic transitions Multistability and hysteretic transitions
1D bifurcation diagrams1D bifurcation diagrams
Multistability and hysteretic transitions Multistability and hysteretic transitions
Control forceControl force ττ increasesincreases
ττ decreasesdecreases
General structure of bifurcation diagramGeneral structure of bifurcation diagram
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Hopf bifurcation
stable fixed point
Multi-leaf structureMulti-leaf structureSize of period-1 orbit
Orbit is stable
Orbit is unstable
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 0Bifurcation diagram Leaf 0
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Multistability and hysteretic transitions Multistability and hysteretic transitions
Control forceControl force ττ increasesincreases
ττ decreasesdecreases
General structure of bifurcation diagramGeneral structure of bifurcation diagram
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Hopf bifurcation
stable fixed point
Multi-leaf structureMulti-leaf structureSize of period-1 orbit
Orbit is stable
Orbit is unstable
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 0Bifurcation diagram Leaf 0
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

General structure of bifurcation diagramGeneral structure of bifurcation diagram
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Hopf bifurcation
stable fixed point
Multi-leaf structureMulti-leaf structureSize of period-1 orbit
Orbit is stable
Orbit is unstable
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 0Bifurcation diagram Leaf 0
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Hopf bifurcation
stable fixed point
Multi-leaf structureMulti-leaf structureSize of period-1 orbit
Orbit is stable
Orbit is unstable
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 0Bifurcation diagram Leaf 0
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 0Bifurcation diagram Leaf 0
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 1Bifurcation diagram Leaf 1
Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Bifurcation diagram Leaf 2Bifurcation diagram Leaf 2Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Leaf 2 transition to chaosLeaf 2 transition to chaos
ττ=135=135
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Bifurcation diagram Leaf 3Bifurcation diagram Leaf 3
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Bifurcation diagram Leaf 4Bifurcation diagram Leaf 4
Hopf bifurcation
period-doubling bifurcation
crisis of attractors
subcritical Neimark-Sacker bifurcation
supercritical Neimark-Sacker bifurcation
stable fixed point chaos
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (I)I)In In W Just et al Phys Rev Lett 8 562 (1998)W Just et al Phys Rev Lett 8 562 (1998) it is shownit is shown
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
ΘΘ((KKττ)) ndash period of the resulting cycle in the system under controlndash period of the resulting cycle in the system under control
TT ndash period of the unperturbed orbitndash period of the unperturbed orbit κ κ ndash ndash a parameter characterizing the effect of the control force on the system a parameter characterizing the effect of the control force on the system
dynamics for thedynamics for the particular orbit Does not depend on KK or or ττ - - derivative of derivative of ΘΘ((KKττ)) over over ττ
Facts
11 ΘΘ(KT)=T(KT)=T22 Control force Control force F(t)=x(t-F(t)=x(t-ττ)-x(t)=)-x(t)=00 not only for not only for ττ=T=T but alsobut also for for
any any ττ=nT=nT nn=12hellip=12hellip
33 ThusThus Θ Θ(KnT)=T(KnT)=T
euro
partτΘ
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (II)II)
euro
partτΘ τ=nT =K
nK minus κ n = 012
euro
κpartτΘ τ=T +TKpartτ(τ Θ) τ=T = 0
210
2101
2101
210
2
2
==Θpartminus+Θpartκ
==Θpartminus+Θpartκ
==ΘpartΘτ
minusΘ
+Θpartκ
==⎟⎠
⎞⎜⎝
⎛Θτ
part+Θpartκ
=τ
=τ
=τ=τ=τ
=τ
τ=ττ
τ=ττ
τ=ττ
τ=ττ
nnKK
nTnT
TKT
TK
nTKTK
nTK
nT
nT
nTnTnT
nT
nT
nT
nT
nT
Substitute ττ=nT=nT into
Take into account the facts from the previous slide
And obtain an expressionfor the derivative of Θ with respect to τ
Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Expand Expand ΘΘ into a Taylor series around into a Taylor series around ττ=nT=nT
Period of period-1 periodic orbit for ldquoanyrdquo Period of period-1 periodic orbit for ldquoanyrdquo ττ ( (III)III)
euro
Θ(K τ) = T + partτΘ τ= nT (τ minus nT) + Ο((τ minus nT)2)
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT) n = 012
euro
partτΘ τ=nT =K
nK minus κ n = 012Substitute this into ()
()
and obtain an approximate expression for the and obtain an approximate expression for the period-1 orbit of the system under control period-1 orbit of the system under control
for the case of for the case of ττ close to close to nTnT
()
Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Period of period-m periodic orbit for ldquoanyrdquo Period of period-m periodic orbit for ldquoanyrdquo τ τ
21210)(
)( ==minusτκminus
+asympτΘ mnnmTmnK
KmTK
Thus for the cycle of the period Thus for the cycle of the period mTmT m=12hellipm=12hellip
Facts
1 It is not likely that a period-m orbit has a period exactly mT
2 However it is likely that the period of period-m orbit is close to mT
33 ΘΘ(KmT)=T(KmT)=T
44 For a different orbit For a different orbit κκ will be different will be different
55 Observation for a period-Observation for a period-mm orbit orbit κκmm becomes becomes κκmm
66 Eq () should hold for period-m orbits approximatelyEq () should hold for period-m orbits approximately
K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

K=013K=013
K=08K=08
K=20K=20
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-1 orbits numerics vs analytics of period-1 orbits numerics vs analytics
euro
Θ(K τ) asymp T +K
nK minus κ(τ minus nT)
n = 01234
n - the number of the leaf of the bifurcation diagram
Numerical fit for κ is 035
K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

K=K=0808
by formulaby formula
numericallynumerically
Period Period ΘΘ of period-2 and period-4 orbits of period-2 and period-4 orbits numerics vs analytics numerics vs analytics
m=m=22 n= n=012012period-2 orbitperiod-2 orbit
m=m=44 n= n=0101period-4 orbitperiod-4 orbit
)(
)(
nmTmnK
KmT
K
minusτκminus
+asymp
asympτΘ
n - the number of the leaf of the bifurcation diagramm ndash the integer ldquoperiodrdquo of the periodic orbit
n=0
n=1 n=2
n=0n=1K=K=2020
Numerical fit for κ is 035
Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Limit cycles classification Limit cycles classification
nn
euro
Θ(K τ) asymp mT +K
nK minus κ m(τ minus nmT) n = 012m =12
Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Main conclusions Main conclusions
The bifurcation diagram in The bifurcation diagram in ((ττKK)) parameter space has essentially parameter space has essentially multi-leaf structuremulti-leaf structure
bull The lager the period of the orbit the smaller the domain of its The lager the period of the orbit the smaller the domain of its stabilization isstabilization is
bull The same limit cycle can have several domains of stabilityThe same limit cycle can have several domains of stability
bull Increase of both Increase of both ττ and and KK leads to severe multistability leads to severe multistability
AG Balanov NB Janson E Scholl ldquoDelayed feedback control of chaos Bifurcationanalysisrdquo Phys Rev E 71 016222 (2005)
Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-

Delayed feedback control of chaos Delayed feedback control of chaos bifurcation analysisbifurcation analysis
N Janson (Loughborough)N Janson (Loughborough)
Collaborators A Balanov and E SchCollaborators A Balanov and E Schoumlll (TUB)oumlll (TUB)
Technische UniversitTechnische Universitaumlt aumlt BerlinBerlin
Loughborough UniversityLoughborough University
- PowerPoint Presentation
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Period of period-1 periodic orbit for ldquoanyrdquo t (II)
- Slide 24
- Period of period-m periodic orbit for ldquoanyrdquo t
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
-
Related Documents