Deformation of adaptive materials. Part I. Constrained deformation of polydomain crystals Alexander L. Roytburd*, Julia Slutsker Department of Materials and Nuclear Engineering, University of Maryland, College Park, MD 20742, USA Received 3 August 1998; received in revised form 15 February 1999 Abstract Deformation of an adaptive heterophase crystal with variable microstructure is considered. Under mechanical constraint the phase transformation in single component systems result in an equilibrium two-phase mixture. A typical equilibrium microstructure of a constrained crystal is a polydomain, i.e. an alternation of the plane-parallel layers, or domains, of the parent and product phases with a special crystallographic orientation of interfaces between domains. The relative fractions of the domains are determined by the external conditions. The free energy of a polydomain is a non-convex function of constrained strain. Therefore, the stress–strain relation at displacement controlled deformation of the polydomain is characterized by a negative Young’s modulus. If deformation proceeds under stress control, a hysteretic stress–strain curve on loading and unloading should be observed instead of a negative stress–strain slope. Besides this thermodynamic hysteresis, anelastic hysteresis appears at a constant strain-rate deformation, if the microstructure relaxes more slowly than the strain changes. # 1999 Elsevier Science Ltd. All rights reserved. Keywords: Non-convex free energy; Phase transformation; Superelasticity; Elastic moduli 0022-5096/99/$ - see front matter # 1999 Elsevier Science Ltd. All rights reserved. PII: S0022-5096(99)00018-6 J. Mech. Phys. Solids 47 (1999) 2299–2329 * Corresponding author.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Deformation of adaptive materials.Part I. Constrained deformation of
polydomain crystals
Alexander L. Roytburd*, Julia Slutsker
Department of Materials and Nuclear Engineering, University of Maryland, College Park, MD 20742,
USA
Received 3 August 1998; received in revised form 15 February 1999
Abstract
Deformation of an adaptive heterophase crystal with variable microstructure isconsidered. Under mechanical constraint the phase transformation in single componentsystems result in an equilibrium two-phase mixture. A typical equilibrium microstructure ofa constrained crystal is a polydomain, i.e. an alternation of the plane-parallel layers, or
domains, of the parent and product phases with a special crystallographic orientation ofinterfaces between domains. The relative fractions of the domains are determined by theexternal conditions. The free energy of a polydomain is a non-convex function of
constrained strain. Therefore, the stress±strain relation at displacement controlleddeformation of the polydomain is characterized by a negative Young's modulus. Ifdeformation proceeds under stress control, a hysteretic stress±strain curve on loading and
unloading should be observed instead of a negative stress±strain slope. Besides thisthermodynamic hysteresis, anelastic hysteresis appears at a constant strain-ratedeformation, if the microstructure relaxes more slowly than the strain changes. # 1999Elsevier Science Ltd. All rights reserved.
Keywords: Non-convex free energy; Phase transformation; Superelasticity; Elastic moduli
0022-5096/99/$ - see front matter # 1999 Elsevier Science Ltd. All rights reserved.
PII: S0022 -5096 (99)00018 -6
J. Mech. Phys. Solids 47 (1999) 2299±2329
* Corresponding author.

1. Introduction
Adaptive materials are crystalline materials with a variable microstructurewhich can change under external mechanical, electrical or magnetic ®elds.Mechanically adaptive materials with structural phase transformations areconsidered here. Examples of such kinds of transformations are compositional,order±disorder and martensitic transformations. All phase transformations incrystals are accompanied by some self-strain of a crystal lattice. Therefore, thenucleation and movement of interphase interfaces creates a special mode ofdeformation.
Among the di�erent types of phase transformations, martensitic and ferroelastictransformations are especially interesting because of the high mobility of theinterfaces. A stress-induced martensitic transformation (SIMT) in shape-memoryalloys very often appears as a `superelastic' deformation. The superelastic behavioris characterized by a large recoverable strain and small e�ective modulus.However, the irreversibility of SIMT results in a stress±strain hysteresis loop; itvaries considerably from alloy to alloy.
SIMT usually is structurally reversible: i.e., the material returns to the initialstate during unloading through the same intermediate microstructure statesthrough which it passed under loading. But due to the thermodynamicirreversibility the superelastic deformation combines the features of a non-linearelastic deformation with the features of a plastic one. To decrease irreversibilityor, at least, to obtain superelastic deformation with a controlled hysteresis is afascinating scienti®c and practical problem. The principal approach to its solutionis discussed in this work.
The superelastic deformation is a result of the stress-induced evolution of aheterophase microstructure composed by a parent phase (austenite) and a productphase (martensite). The typical martensitic microstructure consists of martensiticplates embedded into an austenite matrix. There are several equivalentcrystallographic orientations of a martensite plate in an austenite single crystal(24 in the most general case). Di�erently oriented plates make up an irregularmartensitic microstructure corresponding to a random distribution of martensitenucleation sites (usually defects in the austenite phase).
The elastic interaction between martensite plates determines the main featuresof the microstructure evolution (Roitburd, 1978; Roitburd and Kurdjumov, 1979;Khachaturyan, 1983; Olson and Owen, 1992). The distribution of internal stressesin a two-phase microstructure creates energy barriers for transformation whichcannot be overcome due to thermal ¯uctuations. Therefore, the transformationproceeds through a chain of local instabilities. This results in an uneven,avalanche-like evolution of the microstructure accompanied by considerableenergy dissipation due to heat and acoustic emission (Planes and Ortin, 1993;Ortin et al., 1995). The formation and the movement of dislocations also could bean important source of dissipation, but this mechanism does not work in shape-memory alloys with negligible plastic deformation.
It is clear that the dissipation and consequently, the transformation
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±23292300

irreversibility could be decreased if a more regular microstructure could beobtained. This has been demonstrated recently by modeling of a martensitictransformation under cooling (Semenovskaya and Khachaturyan, 1997; Wang andKhachaturyan, 1997). It is necessary to note that the microstructures duringSIMT should be more regular than the microstructures arising during cooling.Under external stress only a few orientations of martensitic plates becomepreferable. The parallel plates form a self-accommodated group. Themicrostructure is composed by the di�erently oriented groups whose interactionsdetermine its properties and development. However, despite the restricted numberof group orientations, it is di�cult to obtain a controlled microstructure in apolycrystal or in a single crystal with a size much larger than the dimension of agroup. For the creation of a microstructure maximally close to an equilibriummicrostructure it is necessary to use a single crystal containing a few or only oneself-accommodated groups of martensitic plates. It can be microcrystals, singlecrystalline ®lms or perfect macrocrystals containing only one group of themartensitic plates (e.g. Otsuka et al., 1976).
The present work is focused on the stress induced evolution of an equilibriumor a close to equilibrium microstructure with controlled architecture. This is themain di�erence from the previous theoretical studies using phenomenological ormodeling approaches for the analysis of irregular martensitic structures (see e.g.Patoor et al., 1995, 1996; Marketz and Fischer, 1995; Sun and Hwang, 1993a, b;Lexcellent et al., 1996; Goo and Lexcellent, 1997).
The problem under consideration is as follows. A crystal which can exist in twophase states is deformed uniformly at constant temperature and then its surface is®xed. If the initial state of the crystal was single phase, then after deformation e1
this state can remain stable or becomes metastable. The metastable state relaxes asit transforms to the product phase or a mixture of the initial and the productphases. The task is to study the thermodynamics of the two-phase state, itsequilibrium microstructure (volume fractions, morphology and the arrangement ofphases) as well as the conditions that are necessary for its formation.
The mixture of coherent phases is considered. For coherent phases withnegligible e�ect of concurrent plastic deformation the transformational self-straindetermines the average deformation of the two-phase crystal with no externalforces ��e0�. Thus, the phase transformation in the constrained crystal results in thetransition of initial stress s=CÃà e to an average (`external') stress s=CÃÃ
- �eÿ�e0�where CÃÃ
-is an elastic modulus of the two-phase solid. On the other hand, the self-
strain is a source of internal stresses in the heterophase mixture due toincompatibility between phases. The thermodynamical analysis of themicrostructural evolution under constraint leads to the constitutive stress±strainrelation for adaptive materials.
1 The following notations are used: for the second-rank tensors of strain and stressÐe (eik; i; k = 1,
2, 3) and s; for the fourth-rank tensors of elastic modulus and complianceÐCÃÃ (Cijkl) and SÃÃ; for vectors
of normalsÐn and N; se�)sijeij; s � e�)sijekl; e^Ce�)Cijkleijekl:
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±2329 2301
The thermodynamic approach obtained above is quasi-static. To take intoaccount strain-rate dependence of the superelastic deformation, it is necessary toconsider the kinetics of SIMT. This is determined by microscopic energy barriersfor nucleation and growth of the martensite phase which can be overcome due tothe thermal ¯uctuations. The thermo-activated kinetics results in the strain-ratedependent component of the deformation irreversibility (Abeyaratne and Knowles,1991, 1993). For a small deviation from the equilibrium evolution, the kinetichysteresis can be described as a viscous friction decreasing with the rate ofdeformation.
A similar strain-rate dependent irreversibility appears due to the di�usion of thelatent heat of transformation (Leo et al., 1993; Shield et al., 1997; Shaw andKyriakides, 1997). However, if the size of a transforming crystal, L, is small andits thermal conductivity is high, the time of temperature relaxation tr=L 2/D (D isa thermal di�usivity) is small when compared to the time of superelasticdeformation, te � e=_e (where _e is the strain rate). Therefore, the non-isothermale�ect can be neglected.
This quasi-equilibrium approach is used for analysis of superelastic deformationin the present work. Microstructures with increasing complexity are considered infour consecutive papers. The deformation of a polydomain crystal, containingplane-parallel layers (domains) of two phases is analyzed in Part I. Thethermodynamics and the non-equilibrium thermodynamics of a crystal whichundergoes a phase transformation with the formation of compatible orincompatible phases are discussed. Two types of hysteresis, thermodynamic andkinetic, are considered. The thermodynamic hysteresis is a result of instability ofincompatible two-phase state under external stress. The strain-rate dependence ofthe deformation is considered on the basis of non-equilibrium thermodynamics.As a result of the analysis, a model of the superelastic behavior of a two-phasesingle crystal is introduced and compared to the existing experimental results ondeformation of Cu-based alloys single crystals.
A polydomain crystal can serve as an element of an adaptive material withmore complex microstructures. As an example of such a material, a compositewith an adaptive two-phase component is considered in Part II. The compositecontains besides an active adaptive component, a passive component with anunchangeable microstructure. Creation of adaptive composites is one of the waysto suppress the instability of microstructure under external stress and decreasestress±strain hysteresis.
In Part III, deformation of the crystals in which the product phase has apolytwin microstructure is analyzed. This polytwin structure a�ects thesuperelastic behavior of materials signi®cantly, because the martensite plates,which are usually compatible to austenite, become incompatible under externalstress. The results are compared with the experiments on superelastic deformationof Cu-based alloys and SIMT of Fe-based alloys.
The theoretical analysis in Parts I, II and III is based on the linear elasticity ofhomogeneous material, i.e. the di�erence between the elastic properties of thephases is neglected. This simpli®cation does not a�ect the principal results of the
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±23292302

analysis if the two-phase microstructure consists of similar phases. If the di�erencebetween elastic properties of the phases is large, it results in special e�ects understrong external or internal stresses. These e�ects are considered in Part IV.
2. The model
Superelastic and anelastic deformation due to the stress induced transformationof a single crystal is analyzed in this part. A crystal that can be in two possiblephase states is considered. The free energy of the uniformly distorted phase isdetermined by its strain. Thus, strain transformations (polymorphic, ferroelastic ormartensitic) are discussed, although a generalization to other solid±solid phasetransformations with additional internal parameters, such as order parameters orcomposition, is possible. The relative stability of the phases is determined by thedi�erence of their free energies:
Df � f 02 ÿ f 0
1, �1�where f 01 and f 02 are the free energies of the undistorted initial and product phases,respectively. Here Df is determined by the temperature T and changes its sign atT0, where T0 is an equilibrium temperature (Fig. 1). It is convenient to consider Dfas an `e�ective temperature'.
The transformation is accompanied by a transformation self-strain (Fig. 2). Asan example we consider the cubic±tetragonal phase transformation with the self-strains:
e0 � e0
0@ 1 0 00 ÿw 00 0 ÿw
1A: �2�
Fig. 1. Temperature dependencies of free energies of the non-distorted phases.
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±2329 2303

Three di�erent orientation variants of the tetragonal phase are possible. Thesevariants are related to each other as twins. The transformation of one variant intoanother is accompanied by a twining self-strain
etw0 � e 00 ÿ e � e0
0B@ÿw 0 0
0 1 0
0 0 ÿw
1CAÿ e0
1 0 0
0 ÿw0ÿ w
!� etw
0
0B@ÿ1 0 0
0 1 0
0 0 0
1CA;etw0 � e0�1� w�: �3�
The tetragonal self-strain describes the transformation from BCC to FCC lattice,for w=1/2 and from FCC to BCC, for w=2 (`Bain strain'). These are the usualtransformations in shape memory alloys.
To emphasize the e�ect of incompatibility on superelastic deformation onlysingle (or mono-)variant phase transformations are considered here. For example,it can be the transformation of a phase with lower symmetry (usually martensite)to a phase with higher symmetry (austenite). Twinning can also be considered as amono-variant transformation between two variants of a lower symmetrical phase.
Small self-strains are assumed, therefore, the free energies of the phases aredetermined by the linear elasticity:
f1 � f 01 � 1
2 e^C1e; f2 � f 0
2 � 12�eÿ e0� ^C2�eÿ e0�, �4�
where CÃÃ1 and CÃÃ2 are the elastic moduli tensors of the phases. For the twinningf 01=f 02.
We assume that the relations (4) are valid in all areas of strain, correspondingto each phase. It means that a hypersurface formed by the intersection of twoparaboloids with apexes at e � 0 and e � e0 is considered instead of a double well
Fig. 2. The transformational self-strains at a cubic-tetragonal transformation and the self-strain at
twinning.
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±23292304
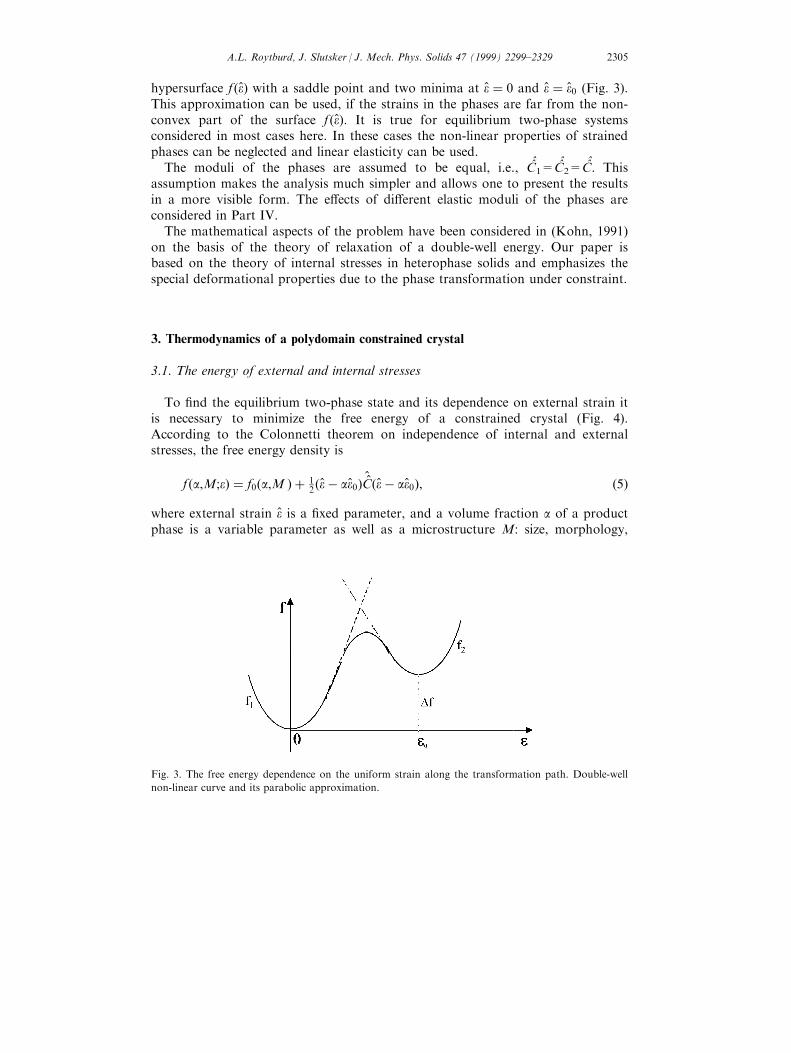
hypersurface f�e� with a saddle point and two minima at e � 0 and e � e0 (Fig. 3).This approximation can be used, if the strains in the phases are far from the non-convex part of the surface f�e�. It is true for equilibrium two-phase systemsconsidered in most cases here. In these cases the non-linear properties of strainedphases can be neglected and linear elasticity can be used.
The moduli of the phases are assumed to be equal, i.e., CÃÃ1=CÃÃ2=CÃÃ. Thisassumption makes the analysis much simpler and allows one to present the resultsin a more visible form. The e�ects of di�erent elastic moduli of the phases areconsidered in Part IV.
The mathematical aspects of the problem have been considered in (Kohn, 1991)on the basis of the theory of relaxation of a double-well energy. Our paper isbased on the theory of internal stresses in heterophase solids and emphasizes thespecial deformational properties due to the phase transformation under constraint.
3. Thermodynamics of a polydomain constrained crystal
3.1. The energy of external and internal stresses
To ®nd the equilibrium two-phase state and its dependence on external strain itis necessary to minimize the free energy of a constrained crystal (Fig. 4).According to the Colonnetti theorem on independence of internal and externalstresses, the free energy density is
f�a,M;e� � f0�a,M � � 12�eÿ ae0� ^C�eÿ ae0�, �5�
where external strain e is a ®xed parameter, and a volume fraction a of a productphase is a variable parameter as well as a microstructure M: size, morphology,
Fig. 3. The free energy dependence on the uniform strain along the transformation path. Double-well
non-linear curve and its parabolic approximation.
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±2329 2305
shape and arrangements of phases. The ®rst term in Eq. (5),
f0�a,M � � �1ÿ a�f 01 � af 0
2 � eint�a,M �, �6�is the free energy of an unconstrained coherent two-phase crystal. Besides the freeenergies of the undistorted phases f0(a, M ) contains the internal energy of themixture, eint(a, M ).
The second term in Eq. (5) is the constraint energy, i.e. the elastic energy of theuniformly deformed crystal. ae0 is its average self-strain related to a non-transformed initial phase. The uniform stress
s � ^C�eÿ ae0� �7�
is the response to the external constraint e. The constraint energy does not dependon microstructure, if the scale of the microstructure is small enough in comparisonwith the crystal sizes.
3.2. The free energy of the coherent two-phase crystal
If the scale of the microstructure is small in comparison with the crystal sizes,the equilibrium microstructure is a periodic alternation of plane parallel layers ofthe phases, or domains (Kohn, 1991; Roytburd, 1993). The internal elastic energyis (Roitburd, 1971)
eINT � a�1ÿ a�eI, eI � 12 e0
^G�n0�e0, �8�
where eI is an energy of a plane-parallel plate of a product phase embedded into
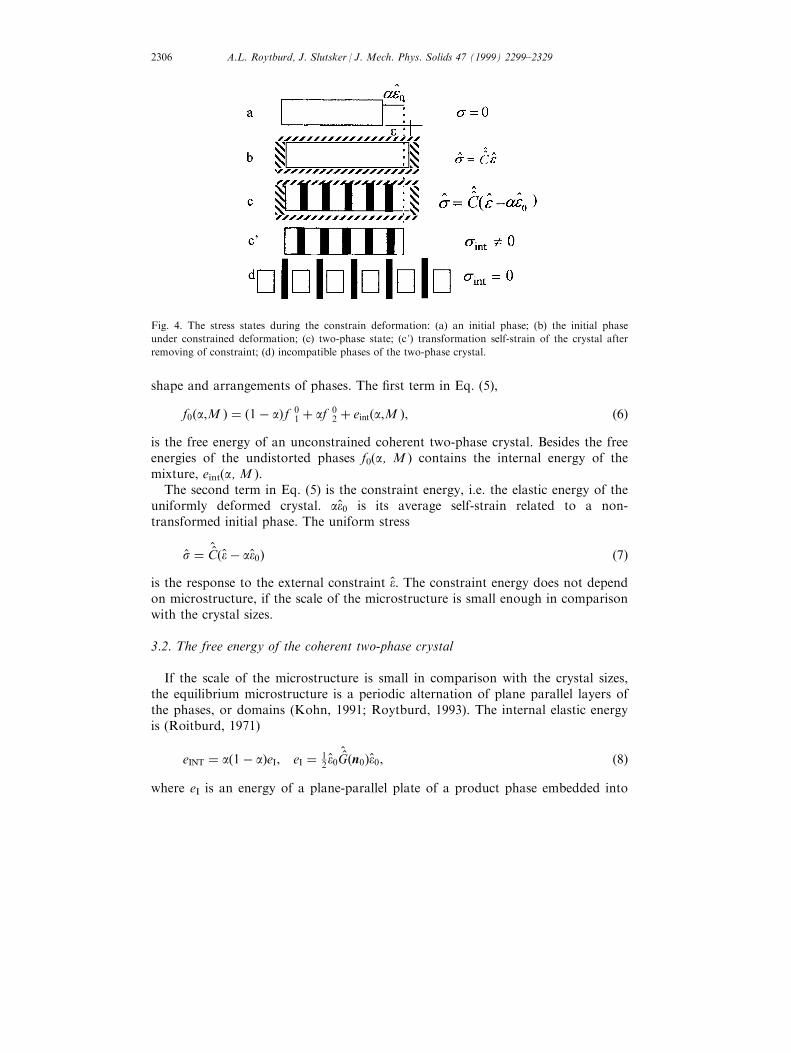
Fig. 4. The stress states during the constrain deformation: (a) an initial phase; (b) the initial phase
under constrained deformation; (c) two-phase state; (c ') transformation self-strain of the crystal after
removing of constraint; (d) incompatible phases of the two-phase crystal.
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±23292306

an in®nite matrix of an initial phase. GÃÃ(n)=CÃÃÿCÃÃn(nCÃÃn)ÿ1nCÃÃ is the planar elastictensor. n is the normal to the plate which coincides with the interface betweenlayers, n0 corresponds to a minimum of the plate energy eI and consequently to aminimum of eINT. The equilibrium orientations n0 and the corresponding energyeI(n0) are calculated in several works (e.g. Roitburd, 1978; Khachaturyan, 1967,1983). The results of the calculations are very simple for many practicallyimportant cases (Roitburd and Kosenko, 1977). When one of the principal self-strains has a sign opposite to the signs of the other two, the internal stresses in alayer structure are uniaxial. For example, for a crystal with a cubic elasticanisotropy and a tetragonal self-strain [Eq. (2)]:
eI � 12Eh100ie
20w
2, �9�
where Eh100i is the Young's modulus along the cubic axis h100i.If the principal strains of a self-strain tensor have the same signs, then the
orientation of the interfaces n0 coincides with the axis of the strain which has thelargest absolute magnitude. The stress state is biaxial and its energy is as below;
eI �
8>>><>>>:Ee20
1
1ÿ nw2 n0? axis x1 if ÿ 1<w<0
1
2Ee20
��wÿ n�21ÿ n2
� 1
�n0k axis x1 if w<ÿ 1
: �10�
These expressions are written for elastically isotropic phases but they can be easilygeneralized to anisotropic elasticity (Roitburd and Kosenko, 1977).
If one of the principal strains is zero, and the other two have opposite signs,then there is a special orientation n0, when eI(n0)=0. It means that the phases arecompatible along the plane interface with normal n0. For example, for the twins[Eq. (3)] eI is zero if the interface between them is (110) or (110). Another exampleof compatible phases corresponds w=0 and will be considered below. In this casean initial and a product phase are in contact along the (100) plane without stress.
3.3. The scale of polydomain microstructure
Besides the elastic energy, the internal energy of the coherent two-phase crystalcontains the energy of interphase interfaces, 2gL/D, where g is the speci®c surfaceenergy of the interfaces, D is the period of the phase alternation, L is thedimension of the crystal. This energy together with the energy of non-uniformmicrostresses near the ®xed external surface of the crystal, contributes to thee�ective surface energy of the crystal. The microstresses arise near the externalsurface due to the periodic deviation of an actual self-strain from an average self-strain. According to the St Venant principle the microstresses are localized in apre-surface layer of thickness roughly equal to the period of the layer alternation.
The energy of this distorted layer is equal to xe0D, where e0 � 12 e0CÃ
à e0 is thecharacteristic constraint energy, x is a numerical coe�cient of order of 1 which is
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±2329 2307

dependent on the domain fraction a and the orientation of the surface (Roitburd,1978; Khachaturyan, 1983; Roytburd, 1993, 1998). The combined energy of theinterfaces and the surface microstresses
G � xe0D� 2gL=D �11�has minimum for an equilibrium domain period D0
D0 ������lLp
, �12�where l=g/xe0 is the microscopic characteristic length. The equilibrium e�ectivesurface energy is then
G�D0� � 2xe0�����lLp
: �13�The total surface energy of the crystal is proportional to L 2, while the elasticenergy is proportional to L 3. Therefore, the contributions to the energy densityare in the ratio D0/L:1 or
��lp=����Lp
. It means that the surface energy is negligiblewhen macroscopic size crystals are considered here and after in Part I. Themicroscopic e�ects will be taken into account in Part II.
Thus, Part I is based on the common approximation of homogenizationtheories that the small parameter of the theory D/L is close to zero. In spite ofthat, the important features of the microstructure pattern, the uniformity andperiodicity, has been dictated by the minimizing of the microstresses. This patternis very similar to polydomain structures of ferromagnetics (or ferroelectrics) whereit is a result of minimization of the magnetostatic (or the electrostatic) energy.Therefore, a two-phase constrained crystal should be consideredthermodynamically as a polydomain collection of elastic domains (Roitburd, 1971,1978; Khachaturyan, 1983; Roytburd, 1993).
3.4. The free energy of the equilibrium constrained polydomain two-phase crystal
Thus, the free energy of the two-phase crystal is
f�a;e� � �1ÿ a�f01 � af 02 � a�1ÿ a�eI � 1
2�eÿ ae0� ^C�eÿ ae0�: �14�
Taking into account that the constraint energy can be written as follows:
econst � 12�eÿ ae0� ^C�eÿ ae0� � �1ÿ a�e1 � ae2 ÿ a�1ÿ a�e0, �15�
where e1 � 12 e
^Ce, e2 � 1
2�e ÿ e0� ^C�e ÿ e0�, the free energy can be presented by thefollowing expression:
f�a,e� � �1ÿ a�f1 � af2 ÿ a�1ÿ a��e0 ÿ eI�, �16�where f1=f 01+e1; f2=f 02+e2 are the free energies of the strained Phases 1 and 2.This expression coincides with the relaxed energy in (Kohn, 1991). In spite of the
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±23292308
identity of Eqs. (14) and (16), Eq. (14) seems more adequate to the physics of theproblem, because it does not include the elastic energies of the non-relaxed phases,e1 and e2. These two states cannot coexist because one of them corresponds to thestrain beyond a limit of phase stability. Thus, the non-relaxed states f1 and f2 inEq. (16) could be considered only as reference states which are physicallyimpossible.
The equilibrium fraction of a product phase is determined by the followingequation:
df
da� 0;
df
da� df0
da� e2 ÿ e1 ÿ e0 � 2ae0 � 0 �17�
with the solution:
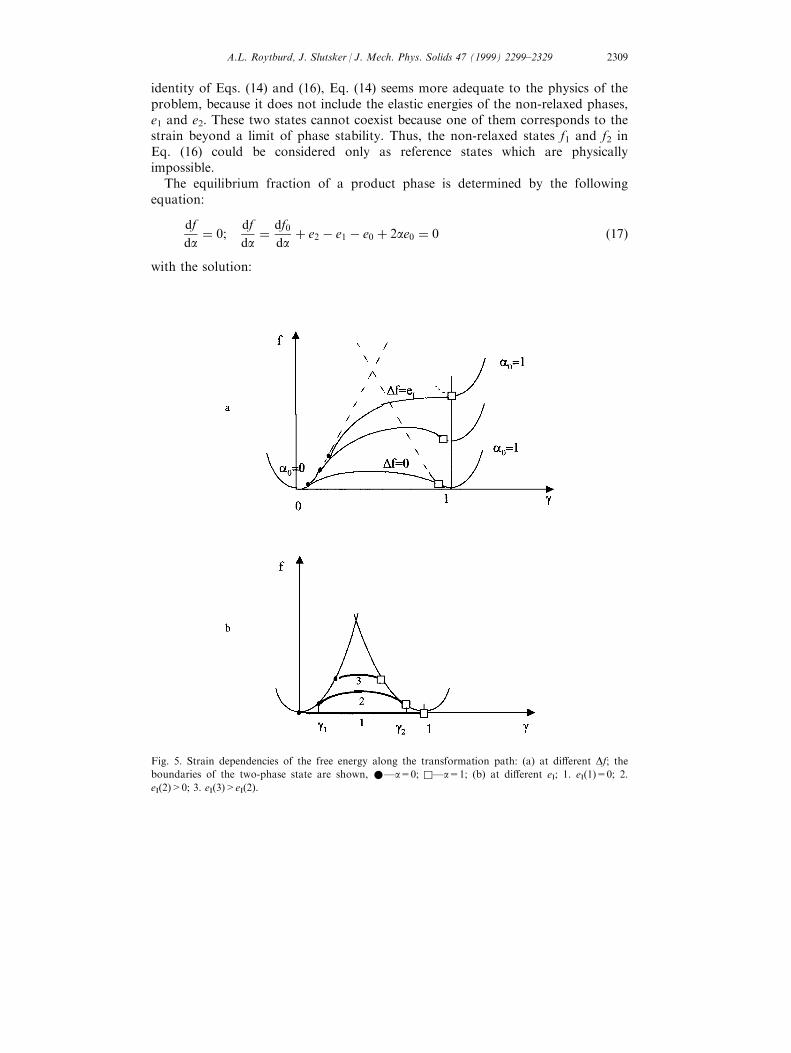
Fig. 5. Strain dependencies of the free energy along the transformation path: (a) at di�erent Df; theboundaries of the two-phase state are shown, *Ða=0; qÐa=1; (b) at di�erent eI; 1. eI(1)=0; 2.
eI(2)>0; 3. eI(3)>eI(2).
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±2329 2309

a0 � 1
2
�1ÿ f2 ÿ f1
e0 ÿ e1
�� s0eÿ Dfÿ eI
2�e0 ÿ eI� , �18�
where the following notation is introduced: s0 � ^Ce0. The three-dimensional
constraint energy e0 is always larger than the energy of two-dimensional constrainteI, therefore, @
2f/@a 2=2(e0ÿeI)>0 and the two-phase state is stable if 0 < a0 < 1,i.e., if the thermodynamic driving force is inside the following interval:
eIRs0eÿ DfR2e0 ÿ eI: �19�The free energy of the equilibrium two-phase state is
f�a0� � f1 ÿ a20�e0 ÿ eI�: �20�The pro®les of the free energy along the transformation path (e=ge0) at thetemperatures T0 (Df = 0) and two temperatures larger than T0 (Df>0) are shownin Fig. 5(a). In Fig. 5(b) the pro®les at Df = 0 for di�erent values of eI are shown.The free energy of the two-phase polydomain state is a non-convex function ofstrain g between g1 and g2
g1 �eI � Df2e0
; g2 �2e0 ÿ eI � Df
2e0: �21�
The curvature @2f/@g 2 becomes equal to zero, if eI=0 (the phases are compatible).Then the non-convex curve section f(g ) transforms to a straight tangent line whichtouches the free energy curves f1 � f 0
1 � 12 eCÃ
à e and f2 � f 02 � 1
2�e ÿ e0�CÃÃ �e ÿ e0�.At f 01=f 02, this case corresponds to twinning.
4. Superelastic strain controlled deformation
The stress state of the equilibrium two-phase constrained crystal according toEq. (7) is
s � ^C�eÿ a0�e�e0�: �22�
This strain±stress relation is characterized by the e�ective elastic modulus:
^C�� ds
de� ^
C� D ^C,
D ^C � ÿs0 da0
de� ÿ s0 � s0
2�e0 ÿ eI� : �23�
The superelastic modulus DCÃÃ corresponds to deformation due to themicrostructure evolution (the change of a0 with e ). This deformation, additionalto the elastic one, results in essential softening of the e�ective modulus.
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±23292310

For example, consider a polytwin crystal with self-strain (3). Cubic elasticanisotropy is assumed. For this case s 0
11=ÿs 022=(C11ÿC12)e
tw0 , all other
components of stress s0 are zero, eI=0, e0=(C11ÿC12)etw0 . So
DC11=DC22=ÿ[(C11ÿC12)/2] and the e�ective elastic modulus is described by thefollowing matrix:
^C��
0BBBBBB@C �11 C �12 C12 0 0 0
C �11 C12 0 0 0C11 0 0 0
C44 0 0C44 0
C44
1CCCCCCA �24�
with C �11 � C �12 � 12�C11 � C12�. The elastic properties of the polytwin correspond
to a hexagonal symmetry. The shear moduli along (110) and (110) m=C �11ÿC �12are equal to zero, as well as the Young's moduli along h100i and h010i (becausethey are proportional to C �11ÿC �12). Thus, under deformation in plane (001)polytwin resists only to the shear along (100) or (010) (C44) and the hydrostaticpressure C �11+C �12=C11+C12. Its response to these modes of deformation isidentical with the response of a single domain crystal.
To analyze the elastic properties of a heterophase polydomain crystal it isconvenient to consider the e�ective compliance instead of the e�ective modulus.The e�ective compliance is the tensor reciprocal to CÃÃ �.
^S�� ^
Sÿ e0 � e02eI
� ^S� D ^
S �25�
(it is easy to check that SÃÃ� � CÃà �=SÃà � CÃÃ=1Ãà ).For example, a polydomain, consisting of domains of cubic and tetragonal
elastically isotropic phases connected by self-strain �e0� [Eq. (2)], has the e�ectivecompliance:
^S �
0BBBBBB@S�11 S�12 S�12 0 0 0
S�22 S�23 0 0 0S�22 0 0 0
S44 0 0S44 0
S44
1CCCCCCA �26�
eI � 1
2Eh100iw2, DS11 � ÿ 1
Ew2, DS12 � DS13 � 1
Ew, DS22 � DS23 � ÿ 1
E;
S44 � 1
m
(m is a shear modulus).
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±2329 2311
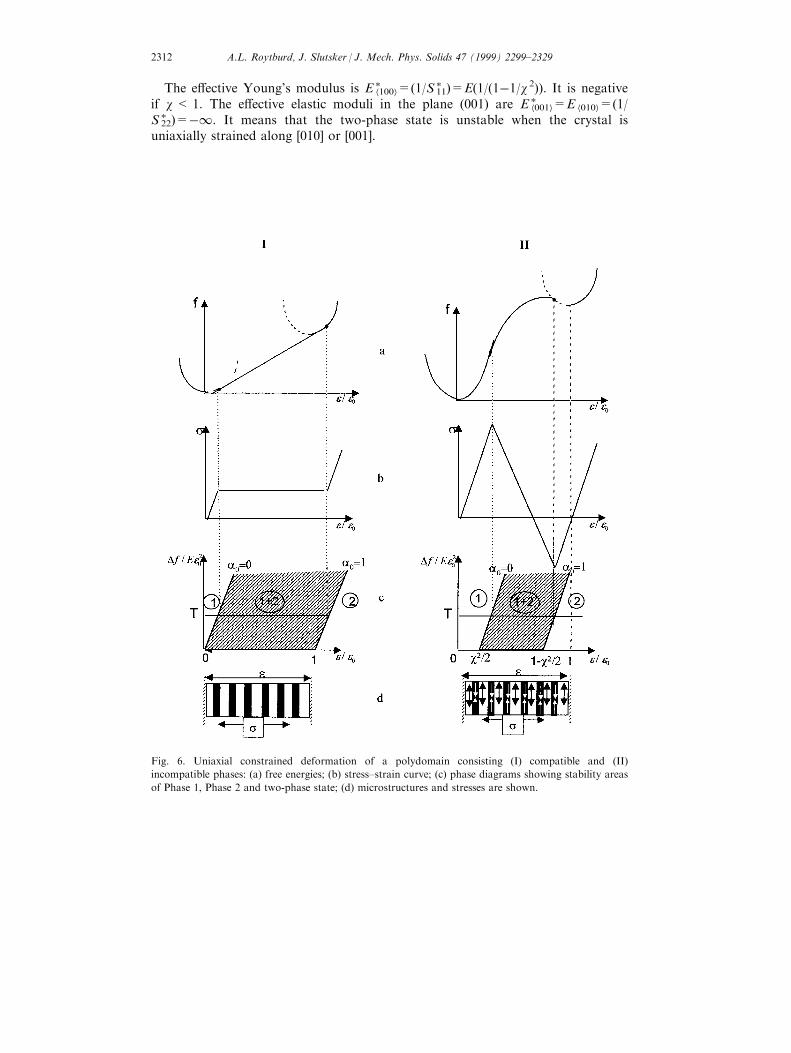
The e�ective Young's modulus is E �h100i=(1/S �11)=E(1/(1ÿ1/w 2)). It is negativeif w < 1. The e�ective elastic moduli in the plane (001) are E �h001i=E h010i=(1/S �22)=ÿ1. It means that the two-phase state is unstable when the crystal isuniaxially strained along [010] or [001].
Fig. 6. Uniaxial constrained deformation of a polydomain consisting (I) compatible and (II)
incompatible phases: (a) free energies; (b) stress±strain curve; (c) phase diagrams showing stability areas
of Phase 1, Phase 2 and two-phase state; (d) microstructures and stresses are shown.
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±23292312

5. One-dimensional constraint; uniaxial displacement controlled deformation
Here the results of the `constraint thermodynamics' are applied to a phasetransformation under uniaxial displacement-controlled deformation. A rod or aplate with a ®xed dimension or a ®xed uniaxial displacement is considered. Thethermodynamics of a partially transformed body is described by the expression forthe free energy which is similar to Eq. (14) ( f 01 is assumed to be zero):
f�a� � Dfa� 12E�eÿ ae0�2 � a�1ÿ a�eI: �27�
The second term on the right side is an elastic energy of one-dimensionalconstraint, which is determined by the di�erence between a ®xed external strainalong the direction x1 and an elongation (or contraction) due to a self-strain e0.E is the Young's modulus. The constrained energy e0 � 1
2Ee20 is not necessarily
larger than eI and therefore, the two-phase polydomain state is not alwayspossible under uniaxial constraint, in contrast to three-dimensional constraint.
For w>0 according to Eq. (9), Eq. (27) becomes
f�a� � Dfa� 12E�eÿ ae0�2 � a�1ÿ a�12Ee20w2: �28�
The equilibrium fraction of the product phase is determined by the equationdf/da=0 [Eq. (18)]:
a0 �Ee0�eÿ 1
2e0w2� ÿ Df
Ee20�1ÿ w2� : �29�
Therefore, if 0 < w < 1, the two-phase polydomain is stable inside the band onthe plane (Df, e ) between the lines (Fig. 6):
f1 � Eee0 ÿ 12Ee
20w
2 �a0 � 0�,
f2 � Ee0�eÿ e0� � 12Ee
20w
2 �a0 � 1�: �30�
The free energy of a two-phase mixture is a non-convex function of Df and straine. Therefore, the average stress of the two-phase state:
s � E�eÿ a0e0� �31�has a negative slope as a function of e, with a negative Young's modulus(Roytburd and Slutsker, 1997; Slutsker and Roytburd, 1997)
E � � E
�1ÿ 1
�1ÿ w2��: �32�
This result coincides with (S �11)ÿ1 from Eq. (26).
At w>1, a0 corresponds to a maximum of f(a ) instead of a minimum. It meansthat a macroscopic energy barrier should be overcome for the transformation.
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±2329 2313

Thus, the transformation becomes possible only if the barrier disappears under thedriving force at a0=0 for a direct transformation or at a0=1 for a reversetransformation. Thus, for w>1 the lines a0=0 and a0=1 determine the strain-controlled hysteresis for a transformation at increasing and decreasing externalstrain.
The analogous conclusions can be made if w < 0. In this case
E � � E
�1ÿ 1
1ÿ 2w2=�1ÿ n��; eI � E
1ÿ nw2e20;
e0 ÿ eI � 1
2Ee20
�1ÿ 2
1ÿ nw2�
and the two-phase state becomes unstable for w>wc,
wc �������������1ÿ n2
r: �33�
We considered above the dependence of the polydomain deformation on eI atconstant e0. The dependence e0 on the direction of strain allows one to considerthe e�ect of e0 at constant eI. For deformation of an isotropic phase along thedirection N, the free energy of the two-phase state at 0 < w < 1 is:
f�a� � Dfa� 12E�eÿ ae0�N��2 � a�1ÿ a�12Ee20w2: �34�
The second term on the right side is an elastic energy of one-dimensionalconstraint, which is determined by the di�erence between a ®xed external strainalong a crystallographic direction N and an elongation (or contraction) in thesame direction due to a self-strain: e0(N)=Ne0N=e0(N
21(1+w )ÿw ) (N1 is a
projection of N on the axis x1).Here it is convenient to present the free energy in a dimensionless form as
follows:
�f�a� � f�a�Ee20� fa� 1
2��e ÿ a�en�2 � a�1ÿ a�1
2w2, �35�
where the dimensionless parameters are
f � DfEe20
; �e � ee0; �en � e0�N �
e0:
The equilibrium fraction of the product phase is
a0 ��e �en ÿ fÿ 1
2w2
�e2n ÿ w2: �36�
The e�ective Young's modulus in the direction N:
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±23292314

E � � E
1ÿ �e2n
�e2n ÿ w2
!�37�
is negative if the two-phase polydomain is stable, i.e. �en > w and N 21>[2w/(1+w )].
If N 21 < [2w/(1+w )], the two-phase state is unstable and E �4 ÿA . Particularly,
it is correct for N1=0, that corresponds to S �22 and S �33 in Eq. (26).For the twinning, when e0=e tw0 [Eq. (3)], �en � 1ÿ 2N2
1, eI=0, and the polytwincan be stable if N 2
1 < 0.5.
6. Strain-rate controlled deformation
Reversible superelastic deformation would be observed if the microstructurechanges faster than the external conditions do, i.e. if the rate of deformation issmall in comparison with the rate of relaxation of microstructure. Otherwise, it isnecessary to consider the time evolution of microstructure. For two-phase stateswhich are not far from equilibrium the relaxation of the microstructure can bedescribed by the following equation:
dadt� ÿKdf�a�
da, �38�
where f is a free energy of the two-phase state and K is a kinetic coe�cient, whichis determined by the mechanism of a phase transformation. In the case when themicrostructure consists of plane-parallel domains and the changing of themicrostructure proceeds through the moving of interdomain interfaces, thecoe�cient K is determined by mobility of these interfaces. If the movement of theinterfaces is by a thermoactivation process, then K0exp(ÿU/kT ), where U is theactivation energy of interface movement. Near a=0 or a=1 the evolution of themicrostructure is limited by the nucleation of domains rather than by themovement of domain interfaces. However, in most cases the nucleation ofdomains can be heterogeneous and does not limit the process. So Eq. (38) can beapplied to these marginal states too. We consider K as a phenomenologicalparameter of the system.
According to Eq. (16) Eq. (38) can be written as:
1
2K�e0 ÿ eI�dadt� ÿ�aÿ a0�,
tdadt� ÿ�aÿ a0�; t � 1
2�e0 ÿ eI�K , �39�
where t is a time of relaxation. The solution of Eq. (39) describes the timeevolution of the microstructure.
As an example, consider a uniaxial strain controlled deformation. The strain isa given function of time e(t ). Then, the non-linear stress±strain dependence is
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±2329 2315

s�t� � E�e�t� ÿ a�t�e0�N��: �40�The time-dependent equilibrium fraction in Eq. (39) is the following:
a0�t� � �e�t�gÿ c,
g � �en�e2n ÿ w2
; c � f� w2=2�e2n ÿ w2
, �41�
where a0 changes from 0 to 1.Consider the deformation with a constant rate _e , i.e. �e � �c=g� � nt where
n � _e=e0. Under the external deformation the fraction of the product phaseincreases as below:
a � ntg�t=tÿ 1� eÿt=t� if a0<1,
a � 1ÿ ntg�1ÿ exp
�ÿ 1
ntg
��exp
�ÿ t
tÿ 1
ntg
�if a0 � 1: �42�
Introduce t0 � ��e2n ÿ w2�t � �t�en=g� � �Ee20K �ÿ1 which is the relaxation timedependent on the kinetics of a transformation only. Then the average stress in thepolydomain state under increasing deformation is
�s � s=Ee0 � �e ÿ a�en � �e �1ÿ g�en� � c�en � rg2�1ÿ exp
�c�enrg2ÿ �e �en
rg
��if
a0<1,
�s � �e ÿ �en � rg2
exp
�e2nrg2
!ÿ 1
!exp
�c�enrg2ÿ �e �en
rg
�if a0 � 1,
where r=nt0 is a relaxation rate, i.e. the ratio of the relaxation time of atransformation t0 to a time of the polydomain deformation nÿ1.
For the reverse deformation (decreasing external strain) with the same velocityn, �e � �e 1 ÿ nt where �e1 is a strain where a=1, i.e. the product phase becomesmore stable than two-phase mixture ��e1 � ��c� 1�=g�, from Eq. (42)]. The solutionof the kinetic equation [Eq. (39)] for reverse deformation is:
a � �egÿ c� rg2
�e3n
�exp
��e �enrgÿ �c� 1��en
rg2
�ÿ 1
�if 0<a0<1,
a � rg2
en
�exp
��enrg2
�ÿ 1
�exp
��e �enrgÿ �c� 1��en
rg2
�if a0 � 0: �44�
The average stress in the polydomain state at reverse deformation is equal to
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±23292316

�s � �e ÿ �e �eng� c�en � rg2
�e2n
�exp
��e �enrgÿ �c� 1��en
rg2
�ÿ 1
�if 0<a0<1,
�s � �e ÿ rg2�
exp
��enrg2
�ÿ 1
�exp
��e �enrgÿ �c� 1��en
rg2
�if a0 � 0: �45�
Consider the special case of the phase transformation when f� 12w
2 � 0, i.e. theequilibrium fraction of the product phase is equal to zero, if there is no externalstrain [see Eq. (36)]. In this case in Eq. (41) c=0; g � ��en=��e2n ÿ w2�� and the time-dependent equilibrium fraction is the following:
a0�t� � �e�t��en�e2n ÿ w2
: �46�
The average stress in the polydomain state under increasing deformation is:
�s � �e
1ÿ �e2n
�e2n ÿ w2
!� r
�e2n��e2n ÿ w2�2
�1ÿ exp
�ÿ �e
r��e2n ÿ w2�
��if a0<1,
�s � �e ÿ �e n � r�e2n
��e2n ÿ w2�2
exp
��e2n ÿ w2�2
r�en
!ÿ 1
!exp
�ÿ �e ��e2n ÿ w2�
r
�if a0 � 1:
�47�
For the reverse deformation (decreasing external strain) the average stress in thepolydomain crystal during the reverse deformation is:
�s � �e
1ÿ �e2n
�e2n ÿ w2
!� r
�e2n��e2n ÿ w2�2
"exp
�e ��e2n ÿ w2�
rÿ ��e
2n ÿ w2�2r�en
!ÿ 1
#if
0<a0<1,
�s � �e ÿ r�e2n
��e2n ÿ w2�2
"exp
��e2n ÿ w2�
r�en
!ÿ 1
#exp
�e ��e2n ÿ w2�
rÿ ��e
2n ÿ w2�2r�en
!if a0 � 0:
�48�
According to Eqs. (46) and (48) the hysteresis between the stresses during increasingand decreasing deformation at the same strain is as below:
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±2329 2317

D �s � 2�e2nr
��e2n ÿ w2�2 ÿ�e2nr
��e2n ÿ w2�2"exp
���e ÿ �e1���e2n ÿ w2�
r
�� exp
�ÿ �e
r��e2n ÿ w2�
�#: �49�
The hysteresis increases with r (Fig. 7(a)). If the direction of uniaxial deformationchanges from N1=1 to N1 �
���������������������2w=�1� w�p
at ®xed r, the hysteresis becomes largerbut the contribution of domain interfaces to deformation becomes smaller (Fig.8(a)). If the deformation is very slow, i.e. r 4 0, the hysteresis disappears and thestress±strain relation approaches the equilibrium curve. The average stress atpolydomain state turns out to be:
Fig. 7. Anelastic uniaxial (N1=1) deformation. Hysteresis for di�erent relaxation rate r are shown. (a)
Polydomain; (b) polytwin.
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±23292318
�s � �e
1ÿ �e2n
�e2n ÿ w2
!: �50�
As a special case, consider a twinning and a phase transformation when the initialand the product phases are compatible. For the twinning �en � 1ÿ 2N2
1 and theaverage stress at the polytwin state for the increasing deformation is
�s � r
�e2n
�1ÿ exp
�ÿ �e �e2n
r
��if a0<1,
�s � �e ÿ �en � r
�e2n
�1ÿ exp
�ÿ �e3n
r
��exp
�ÿ �e �e2n
rÿ �e3n
r
�if a0 � 1 �51�
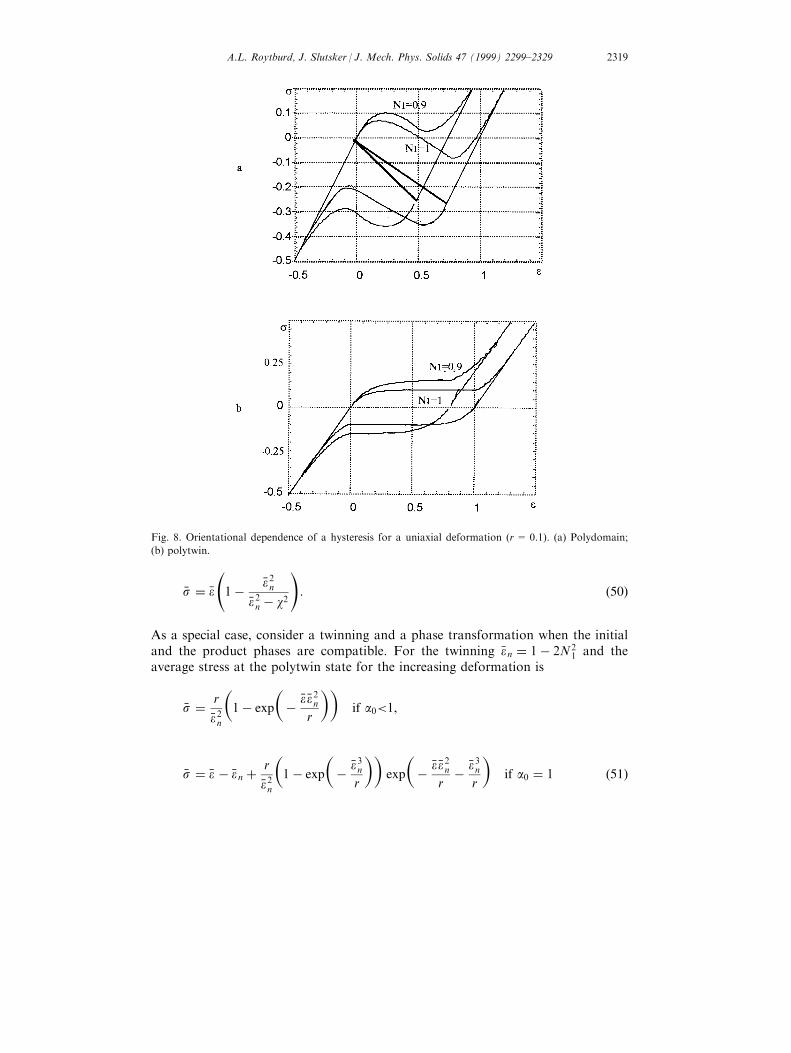
Fig. 8. Orientational dependence of a hysteresis for a uniaxial deformation (r= 0.1). (a) Polydomain;
(b) polytwin.
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±2329 2319
and for the reverse deformation is:
�s � ÿ r
�e2n
�1ÿ exp
���e ÿ �en��e2n
r
��if 0<a0<1,
�s � �e ÿ"
�en � r
�e2n
��e3nrÿ 1� exp
�ÿ �e3n
r
��#exp
��e �e2nr
�if a0 � 0: �52�
The hysteresis between the stresses during increasing and decreasing deformationat the same strain is as below:
D �s � 2r
�e2nÿ r
�e2n
�exp
���e ÿ �en��e2n
r
�� exp
�ÿ �e �e2n
r
��: �53�
The hysteresis grows with r (Fig. 7(b)). If the direction of uniaxial deformationchanges from N1=1 towards N1=0.25 at the ®xed r, the stress hysteresis becomesbroader but the interval of polydomain deformation becomes shorter (Fig. 8(b)).If the deformation is very slow, i.e. r 4 0, the average stress in the polytwin stateis equal to zero independent on the direction of deformation.
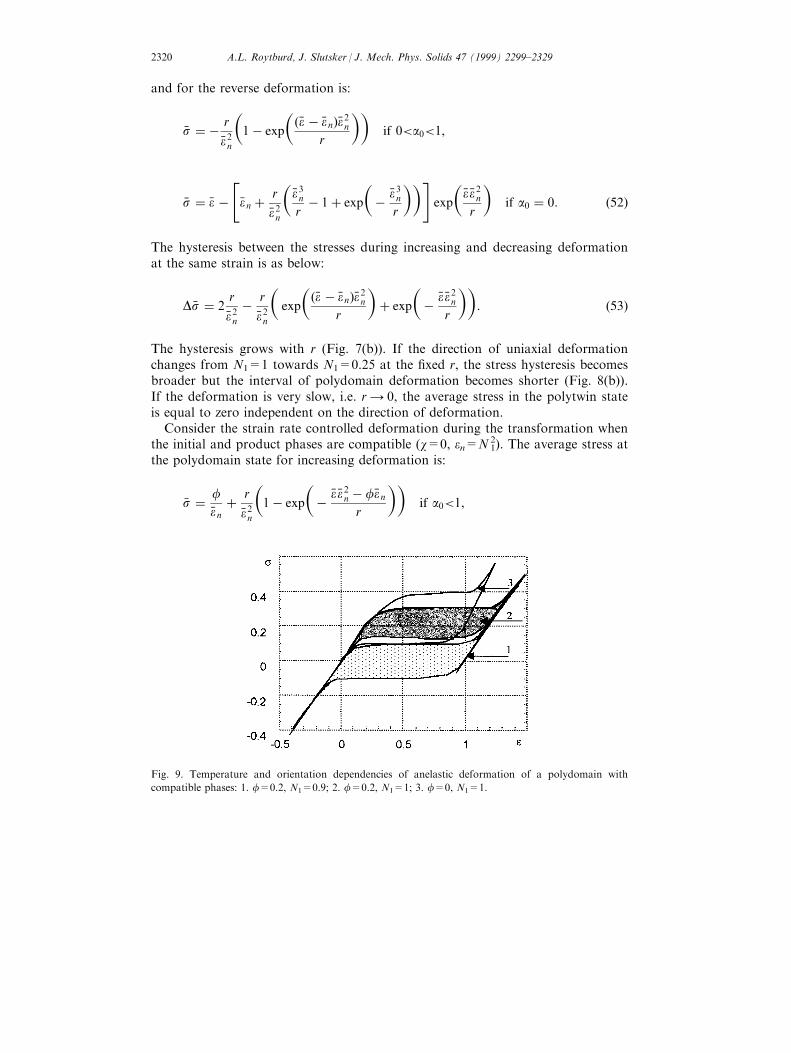
Consider the strain rate controlled deformation during the transformation whenthe initial and product phases are compatible (w=0, en=N 2
1). The average stress atthe polydomain state for increasing deformation is:
�s � f�en� r
�e2n
�1ÿ exp
�ÿ �e �e2n ÿ f�en
r
��if a0<1,
Fig. 9. Temperature and orientation dependencies of anelastic deformation of a polydomain with
compatible phases: 1. f=0.2, N1=0.9; 2. f=0.2, N1=1; 3. f=0, N1=1.
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±23292320
�s � �e ÿ �en � r
�e2n
�1ÿ exp
�ÿ �e3n
r
��exp
��e3nrÿ�
�e �e2n ÿ f�enr
��if a0 � 1 �54�
and for the reverse deformation is:
�s � f�enÿ r
�e2n
�1ÿ exp
��e �e2n ÿ �e3n ÿ f�en
r
��if 0<a0<1,
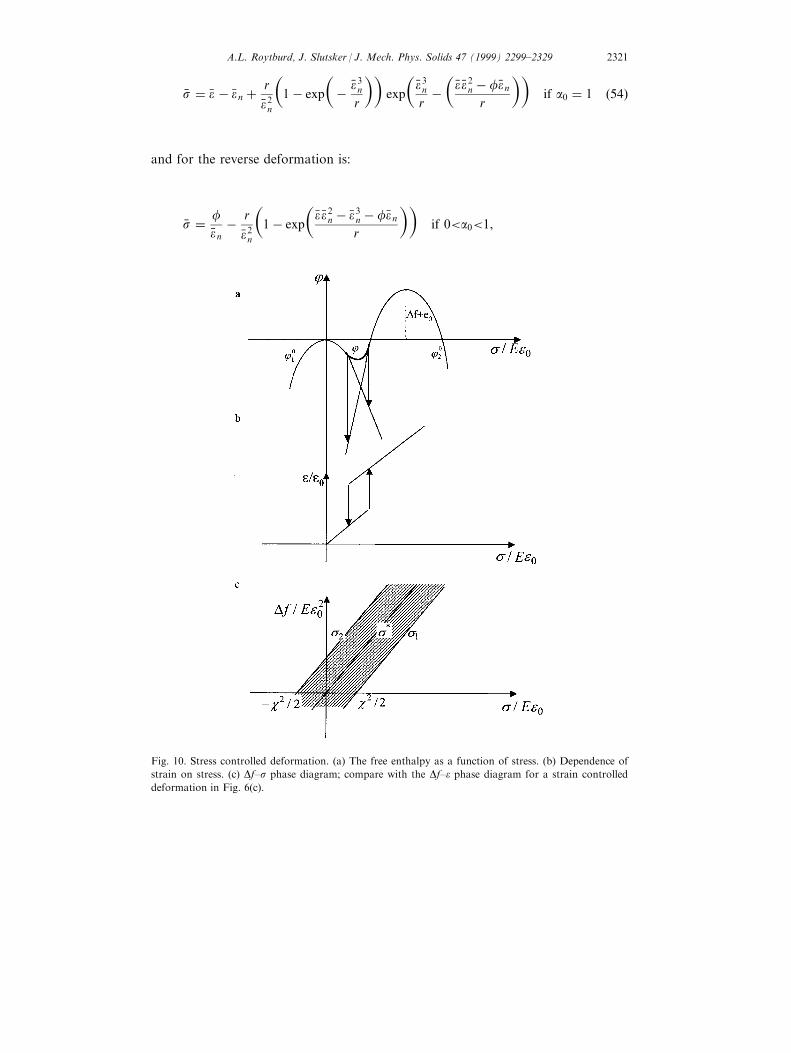
Fig. 10. Stress controlled deformation. (a) The free enthalpy as a function of stress. (b) Dependence of
strain on stress. (c) Df±s phase diagram; compare with the Df±e phase diagram for a strain controlled
deformation in Fig. 6(c).
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±2329 2321

�s � �e ÿ r
�e2n
�exp
��e3nr
�ÿ 1
�exp
��e �e2nrÿ f�en � �e3n
r
�if a0 � 0 �55�
(f is the e�ective temperature).In Fig. 9 the temperatures and the orientation dependence of stress±strain
curves are shown. The stress hysteresis becomes larger with decreasing of N1,however, the interval of polydomain deformation becomes smaller.
7. Stress controlled versus strain controlled deformation
The features of a polydomain crystal under strain control were discussed above.We will show now that the polydomains manifest a quite di�erent deformationbehavior when the stress is a controlled external parameter.
Consider the deformation under a ®xed stress and ®nd a strain±stress relationwhen the stress is changed. The thermodynamics of the stress controlleddeformation is based on minimizing the free enthalpy instead of the free energyfor the constrained deformation. The free enthalpy of a polydomain crystal is asbelow:
j�a,s� � f0�a� ÿ sae0 ÿ 12
^Ss2, �56�
where the second term is the work of the external stress s on the average self-strain ae0 and the last term is the enthalpy of an elastically stressed crystal. Eq.(56) transforms into the free enthalpy of Phase 1 at a=0 and the free enthalpy ofPhase 2 at a=1 (Fig. 10):
j1�s� � f 01 ÿ 1
2
^Ss2;
j2�s� � f 02 ÿ 1
2
^Ss2 ÿ se0 � f 0
2 � e0 ÿ 12
^S�sÿ s0�2:
�57�
The equilibrium domain fraction a0�s� follows from equations
djda� df0
daÿ se0 � 0,
a0�s� � 1
2
�1� Dfÿ se0
eI
�,
ÿeI � DfRse0ReI � Df �58�
(a0=0 at s1e0 � ÿeI � Df, a0=1 at s2e0 � eI � Df �.It corresponds to the equilibrium free enthalpy (Fig. 10):
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±23292322

j�a0�s�;s� � f 01 ÿ 1
2
^Ss2 � a20eI: �59�
Taking into account the thermodynamic de®nition of strain as below:
e � ÿdjds� ^
Ss� ae0 or s � ^Sÿ1�eÿ ae0�, ^
Sÿ1� ^
C, �60�
we conclude that a0�s� [Eq. (58)] coincides with a0�e� [Eq. (18)], if the stress andthe strain are connected by the relation (60).
Thus, a0�e� for a strain controlled deformation can be deduced from a0�s� for astress controlled deformation as a solution of the equation a0 � a0�s� withs �CÃÃ�eÿ ae0�. This way to determine the characteristic of a constraineddeformation through the characteristics of a stress controlled one usually is easierthan the direct analysis of the constrained deformation.
If the compliance is calculated, using the equilibrium strain e � ^Ss � a0e0 and
the Eq. (58) for the equilibrium domain fraction a0�s�, as follows:^S�� ^
S� da0ds� e0 � ^
S� e0 � e0d2f0da2
����a0
, �61�
then we come to the expression (23), obtained for the supercompliance at thestrain controlled deformation.
However, in spite of the formal identity of the equilibrium domain fraction, thestress±strain relation and the supercompliance, there is a principal di�erencebetween the strain-controlled deformation and the stress-controlled one: thesecharacteristics describe a stable equilibrium in the ®rst case and an unstableequilibrium in the second, according to Eq. (17):
d2jda2� d2f0
da2
����a0�2e0 > 0: �62�
However, Eq. (56) leads to:
d2jda2� d2f0
da2
����a0<0: �63�
Therefore, the stress±strain relation, corresponding to the non-convex part of thefree energy f0(a ) cannot be realized under a stress-controlled deformation.
Consider for illustration a stress controlled uniaxial deformation (Fig. 10).During the increase of stress from 0 to s1 Phase 1 deforms elastically and at s1transforms into Phase 2 without the equilibrium intermediate two-phase state. Thestrain jumps to e0. Phase 2 deforms elastically beyond s1. During unloading Phase2 jumps to Phase 1 at stress s2 which is lower than stress s1. Phase 1 does nottransform during loading into Phase 2 between s � and s1 in spite of the fact thatPhase 2 is more stable than Phase 1 at s �< s < s1, as well as during unloadingPhase 2 does not return to Phase 1 when the stress becomes lower than s �. The
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±2329 2323

reason for the stability of metastable states is that they are separated from thestable state by a macroscopic energy barrier j(a0)ÿj 0
1 for 1 4 2 transformationand j(a0)ÿj 0
2 for 2 4 1 transformation. Thus, the overloading or underloading inrespect to the equilibrium stress s � is necessary to overcome these barriers.Therefore, the stress controlled equilibrium deformation manifests the hysteresisof the strain in response to the variation of the stress. The lines s1 � �ÿeI �Df �=e0 � ÿ1
2Ee0w2 � �Df=e0� and s2 � �eI � Df �=e0 � 1
2Ee0w2 � �Df=e0� form on
the plane Dfÿs the band with the equilibrium line s �=Df/e0 inside it. The two-phase states have free enthalpy larger than single phase states and therefore, thetransformation cannot start inside the band. Outside the band the transformationproceeds without the macroscopic energy barrier.
8. Discussion
We have explored the deformation accompanied by phase transformations in athree- and one-dimensional constrained crystal. The main result of thisinvestigation is the existence of a stable two-phase state dictated by the elasticinteractions in a constrained system. The deformational properties of the two-phase system strongly depend on the types of phases involved in the phasetransformation. If during the phase transformation an initial phase is compatibleto a product phase, the e�ective elastic modulus of the two-phase state is equal tozero. In the case when incompatible phases are involved, the e�ective elasticmodulus of the two-phase state is negative.
In the last case the superelastic behavior under load (stress) controlleddeformation is di�erent from the superelastic behavior under displacement (strain)controlled deformation. Under displacement controlled deformation there is asection with negative slope on the stress±strain curve. Under load controlleddeformation there is a hysteresis loop, so-called thermodynamic hysteresis, insteadof a section with negative slope. This thermodynamic hysteresis is an intrinsicproperty of phase transformations with incompatible phases and it does notdepend on strain rate.
Another type of hysteresis, kinetic hysteresis, associated with non-reversibility ofthe superelastic deformation, depends on strain rate and decreases with decreasingstrain rate.
The existence of thermodynamic hysteresis is supported by many experimentson superelastic deformation of Cu-based alloys. Two kinds of superelasticbehavior depending on a product martensite phase are found in the experimentson deformation of Cu±Al±Ni single crystalline alloys (Otsuka et al., 1976). Thestress±strain curve is characterized by a small hysteresis if b±b ' transformationoccurs. The stress-induced transformation b±g ' demonstrates a large hysteresis.Similar results are obtained in (Novak et al., 1994, 1995, 1998) on deformation ofCu±Al±Ni alloys and in (Dutkiewicz et al., 1996) on deformation of Cu±Al±Mnalloys.
The di�erence in the superelastic behavior in these two cases can be explained
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±23292324
by the presence of the thermodynamic hysteresis when the transforming phases areincompatible (b±g ') and the absence of the thermodynamic hysteresis when theyare compatible (b±b '). The detailed analysis of these martensitic transformationswill be done in Part III.
The dependence of the hysteresis on the orientation of a sample is obtained inexperiments of Horikawa et al. (1988) and Prieb et al. (1995). In general, withdecrease of the Schmid factor, the hysteresis becomes larger and the two-phasearea becomes smaller which qualitatively agrees with our results (Figs. 7(b), 8(b)and 9).
The kinetic hysteresis discussed in this paper qualitatively describes theexperimental results on strain-rate dependent superelastic deformation (Otsuka etal., 1976; Lexcellent et al., 1996).
The nucleation of new martensitic plates can also contribute to the strain-rateindependent hysteresis. The contribution of the plate multiplication of thehysteresis has been qualitatively studied for twinning of martensite (Abeyaratne etal., 1996). However, the energy barriers for formation of new martensite platescan be avoided if their nucleation is strongly heterogeneous or the transformationproceeds by widening of the plates rather than by their multiplication.
Some comments on the uniaxial deformation considered above are necessary.The negative slope of the stress±strain curve can be observed only for rigorousdisplacement controlled deformation. The negative slope of the s±e curve can beobserved in experiments on stress relaxation under ®xed displacement. Therelaxation should lead to a decrease of stress if loading is interrupted and to anincrease of stress if the unloading is interrupted. These experiments wereperformed by MuÈ ller and co-workers (MuÈ ller, 1989; MuÈ ller and Xu, 1991; Fu etal., 1993). This group studied the deformation of a single crystal of Cu-1.9%Zn-7%Al alloy during a martensitic transformation. They found the line of unstableequilibrium by interrupting processes of loading and unloading. This line is adiagonal of the hysteresis loop between the stress±strain curves due to loading andunloading. The line corresponds to the sections with negative slope on stress±strain curves in Fig. 6. The stress in the two-phase crystal moves to the points ofthis line during relaxation (`internal recovery'). Similar experiments wereperformed in other works (Prieb et al., 1995; Prieb and Steckmann, 1995).
The theoretical explanation given by the authors (MuÈ ller, 1989; MuÈ ller and Xu,1991; Fu et al., 1993) was based on a phenomenological analysis of a one-dimensional model of a transforming system. The condition of compatibility wasnot considered. The free energy was assumed as follows:
f�a� � �1ÿ a�f�e1� � af�e2� � Aa�1ÿ a�, �64�
where e1 and e2 are longitudinal strains in the Phases 1 and 2 with a ®xed averagevalue e=(1ÿa )e1+ae2. The last term in Eq. (64) was assumed to be the energy ofinterfaces depending on their number. Thus, in spite of the formal similarity ofEqs. (14) and (64), they describe principally di�erent physical models. The
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±2329 2325

phenomenological approach has been developed in Moumni and Nguyen (1996)where more general forms of the last term in Eq. (64) were discussed.
The equilibrium microstructure is macroscopically uniform if all surface is ®xedor the surface displacement corresponds to a uniform external strain. At auniaxial strain a considerable part of the surface is free. In this case the obtainedperiodic microstructure corresponds to the local minimum of the free energy andis metastable. Therefore, a coarsening of the microstructure is possible. Forexample, under a uniaxial deformation of a long rod the microstructure has atendency to transform into a bi-domain con®guration (Fig. 11). In this case thestress is concentrated inside a neck between domains, the elastic contribution tothe thermodynamics is not proportional to the volume of the phases and most ofthe conclusions of the above analysis become invalid. However, this can beavoided by choosing the sample shape properly. If the sample size along aninterface with normal (n0) is larger than the other dimensions of the sample thenthe coherent stress is su�ciently stable. This comment is relevant to a moregeneral problem of stability of coherent phases. Theory of coherent phasesassumes that the heterophase mixture is macroscopically uniform (Cahn, 1961;Cahn and Larche, 1984; Roitburd, 1984, 1985). It is correct if the sizes of phasesare much smaller than the characteristic sizes of a system. The importance of thespecimen size and shape on development of macroscopic non-uniformity ofcoherent heterophase systems has been demonstrated by Larche and Cahn (1992).
9. Conclusions
The basic conclusions from Part I can be formulated as follows:
1. There is a stable two-phase state dictated by the elastic interactions in aconstrained system.
2. The deformational properties of the two-phase state depend on compatibility
Fig. 11. Coarsening of the coherent phases under uniaxial constraint.
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±23292326

between the initial and the product phases. If the initial and the product phasesare compatible, the e�ective elastic modulus of the two-phase state is equal tozero. If the initial and the product phases are incompatible the e�ective elasticmodulus is negative.
3. The superelastic behaviors of incompatible phases under load (stress) anddisplacement (strain) controlled deformation are di�erent. Under loadcontrolled deformation there is a hysteresis on the stress±strain curve instead ofa section with negative slope.
4. There are two di�erent types of stress±strain hysteresis. First, thethermodynamic hysteresis, which does not depend on strain rate and is anintrinsic property of deformation of incompatible phases. Second, the kinetichysteresis which decreases with decreasing strain rate.
Acknowledgements
This work was supported by the O�ce of Naval Research, Contract N00014-93-1056. The authors would like to thank Dr Leonid Gibiansky and Dr YuryGrabovsky for careful reading of the manuscript and fruitful comments.
References
Abeyaratne, R., Knowles, J.K., 1991. Kinetic relations and the propagation of phase boundaries in
solids. Arch. Rational Mech. Anal. 114, 119±254.
Abeyaratne, R., Knowles, J.K., 1993. A continuum model of a thermoelastic solid capable of under-
going phase transitions. J. Mech. Phys. Solids 41, 541±571.
Abeyaratne, R., Chu, C., James, R.D., 1996. Kinetics of materials with wiggly energies: theory and ap-
plication to the evolution of twinning microstructures in Cu±Al±Ni shape memory alloys. Philos.
Mag. A73, 457±497.
Cahn, J.W., 1961. On spinodal decomposition. Acta Metall. 9, 195±203.
Cahn, J.W., Larche, F., 1984. A simple model of coherent phase equilibrium. Acta Metall. 32, 1915±
1923.
Dutkiewicz, J., Kato, H., Miura, S., Messershmidt, U., Bartsch, M., 1996. Structure changes during
pseudoelastic deformation of CuAlMn single crystals. Acta mater. 44, 4597±4609.
Fu, S., Huo, Y., MuÈ ller, I., 1993. Thermodynamics of pseudoelasticityÐan analytical approach. Acta
Mech. 99, 1±19.
Goo, B.C., Lexcellent, C., 1997. Micromechanics-based modeling of two-way memory e�ect of a single
crystalline shape-memory alloy. Acta mater. 45, 727±737.
Horikawa, H., Ichinose, S., Morii, K., Miyazaki, S., Otsuka, K., 1988. Orientation dependence of b1±b '1 stress-induced martensitic transformation in Cu±Al±Ni alloy. Metallurgical Trans. A 19A, 915±
923.
Khachaturyan, A.G., 1967. On phase transformations in solids. Soviet PhysicsÐSolid State 8, 2163±
2168.
Khachaturyan, A.G., 1983. Theory of Structural Transformation in Solids. John Wiley and Sons, New
York.
Kohn, R.V., 1991. The relaxation of a double-well energy. Continuum Mech. Thermodyn. 3, 193±236.
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±2329 2327
Larche, F.C., Cahn, J.W., 1992. Phase changes in a thin plate with non-local self-stress e�ects. Acta
Metall. Mater. 40, 947±955.
Leo, P.H., Shield, T.W., Bruno, P., 1993. Transient heat transfer e�ects on the pseudoelastic behavior
of shape memory alloy wires. Acta Metall. 41, 2477±2485.
Lexcellent, C., Goo, B.C., Sun, Q.P., Bernardini, J., 1996. Characterization, thermomechanical behavior
and micromechanical-based constitutive model of shape-memory Cu±Zn±Al singe crystals. Acta
mater. 44, 3773±3780.
Marketz, F., Fischer, F.D., 1995. A mesoscale study on the thermodynamical e�ect of stress on marten-
sitic transformation. Metall. and Mater. Trans. A26, 267±278.
Moumni, Z., Nguyen, Q.S., 1996. In: A model of materials with phase change and applications,
Journal de Physique, pp. C1-355±C1-345.
MuÈ ller, I., 1989. On the size of hysteresis in pseudoelasticity. Cont. Mech. Thermodyn. 1, 125±142.
MuÈ ller, I., Xu, H., 1991. On the pseudo-elastic hysteresis. Acta Metall. 39, 263±271.
Novak, V., Malimanek, J., Zarubova, N., 1994. Orientation dependence of s±T phase diagrams for
martensite transformations in Cu±Al±Ni single crystals. Key Eng. Mater. 97 (98), 419±424.
Novak, V., Malimanek, J., Zarubova, N., 1995. Martensitic transformations in single crystals of Cu±
Al±Ni induced by tensile stress. Mater. Science and Eng. A191, 193±201.
Novak, V., Sittner, P., Zarubova, N., 1998. Anisotropy of transformation characteristics of Cu-based
shape memory alloys. Mater. Science and Eng. A234, 414±417.
Olson, G.B., Owen, W.S. (Eds.), 1992. Martensite. ASM.
Otsuka, K., Wayman, C.M., Nakai, K., Sakamoto, H., Shimizu, K., 1976. Superelasticity e�ects and
stress-induced martensitic transformations in Cu±Al±Ni alloys. Act Metall. 24, 207±226.
Ortin, J., Rafols, I., Carrillo, L., Goicoechea, J., Vives, E., Manosa, L., Planes, A., 1995. In:
Experiments and models of avalanches in martensites, Journal de Physique, IV, pp. C8-209±C8-214.
Patoor, E., Eberhardt, A., Berveiller, M., 1995. Micromechanical approach of the fatique behavior in a
superelastic single crystal, Journal de Physique, IV, pp. C8-227±C8-238.
Patoor, E., Eberhardt, A., Berveiller, M., 1996. In: Micromechanical modeling of superelasticity in
shape-memory alloys, Journal de Physique, IV, pp. C1-277±C1-292.
Planes, A., Ortin, J., 1993. Growth kinetics during thermoelastic martensitic transformations. In: Proc.
ICOMAT'92, pp. 407±412.
Prieb, V., Steckmann, H., 1995. In: Pseudo-plastic behavior of single crystals of Cu-based memory
alloys, Journal de Physique, IV, pp. C8-907±C8-912.
Prieb, V., Link, T., Feller-Kniepmeir, M., Steckmann, H., Poljakova, N.A., Udovenko, V.A., 1995. In:
In¯uence of the structure and orientation of the parent phase on the hysteresis of single-crystal
shape memory alloys, Journal de Physique, IV, pp. C8-913±C8-918.
Roitburd, A.L., 1971. Formation of domains of metastable phases during solid state transformations.
Soviet PhysicsÐSolid State 13, 1523±1524.
Roitburd, A.L., Kosenko, N.S., 1977. Elastic energy of a plate inclusion in an anisotropic elastic med-
ium. Scripta Metallurgica 11, 1039±1043.
Roitburd, A.L., 1978. Martensitic transformation as a typical phase transformation in solids. In:
Ehrenreich, F., Seitz, D., Turnbull, D. (Eds.), Solid State Physics. Academic Press, New York, pp.
317±390.
Roitburd, A.L., Kurdjumov, G.V., 1979. Nature of martensitic transformation. Materials Science and
Engineering 39, 141±167.
Roitburd, A.L., 1984. Equilibrium and phase diagrams of coherent phases in solids. Soviet PhysicsÐ
Solid State 26, 1229±1233.
Roitburd, A.L., 1985. Thermodynamics of solid solution decomposition. Soviet PhysicsÐSolid State
27, 598±603.
Roytburd, A.L., 1993. Elastic domains and polydomain phases in solids. Phase Transitions 45, 1±33.
Roytburd, A.L., Slutsker, J., 1997. Equilibrium two-phase microstructure at phase transformation in a
constrained solid. Mater. Sci. and Eng. A238, 23±31.
Roytburd, A.L., 1998. Thermodynamics of polydomain heterostructures. J. Appl. Phys. 83, 228±239.
Semenovskaya, S., Khachaturyan, A.G., 1997. Coherent structural transformations in random crystal-
line system. Acta mater. 45, 4367±4368.
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±23292328

Shaw, J.A., Kyriakides, S., 1997. On the nucleation and propagation of phase transformation fronts in
a NiTi alloy. Acta mater. 45, 683±700.
Shield, T.W., Leo, P.H., Grebner, W.C.C., 1997. Quasi-static extension of shape memory wires under
constant load. Acta mater. 45, 67±74.
Slutsker, J., Roytburd, A.L., 1997. Evolution of equilibrium microstructures in adaptive materials.
Proc. of SPIE 3039, 448±459.
Sun, Q.P., Hwang, K.C., 1993a. Micromechanics modelling for the constitutive behavior of polycrystal-
line shape memory alloysÐI. Derivation of general relations. J. Mech. Phys. Solids 41, 1±17.
Sun, Q.P., Hwang, K.C., 1993b. Micromechanics modelling for the constitutive behavior of polycrystal-
line shape memory alloysÐII. Study of the individual phenomena. J. Mech. Phys. Solids 41, 19±33.
Wang, Y., Khachaturyan, A.G., 1997. Three-dimensional ®eld model and computer modeling of mar-
tensitic transformations. Acta mater. 45, 759±773.
A.L. Roytburd, J. Slutsker / J. Mech. Phys. Solids 47 (1999) 2299±2329 2329
Related Documents











