
DC/AC Converter Control Torque and Flux Control
Jan 19, 2016
DC/AC Converter Control Torque and Flux Control. Converter circuit + Motor Control design Design sliding surface for torque and flux Lyapunov function. denote. Torque and Flux Control (cont.). Calculate. where. does not depend on control. and. Torque and Flux Control (cont.). - PowerPoint PPT Presentation
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

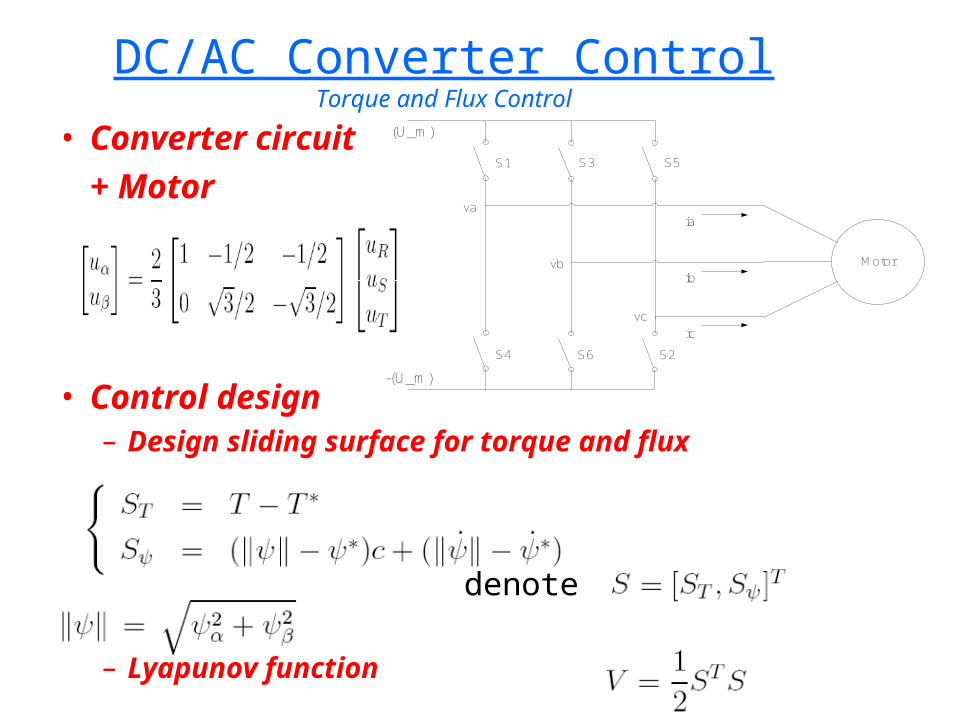
DC/AC Converter ControlTorque and Flux Control
• Converter circuit
+ Motor
• Control design– Design sliding surface for torque and flux
– Lyapunov function
denote
S1
S4 S2
S5S3
S6
(U_m)
-(U_m)
ia
ic
ib
va
vb
vc
Motor


Torque and Flux Control (cont.)
– Calculate
where does not depend on control
and

Torque and Flux Control (cont.)
– Select control logic such that
tends to zero
ControlLogic

Torque & Flux Control (approach 2)
• Cascade Control– From torque and flux equations:
where
– Desired can be calculated– Sliding mode to provide desired current

Cascade Sliding Mode Control
• Idea: Utilize extra degree of freedom
• Sliding surface design L R
S1
S4 S2
S5S3
S6
(U_dc)
-(U_dc)
n
ia
ic
ib
va
vb
vc
Ea
Eb
Ec

Lyapunov Approach• Select control logic based on Lyapunov
function such that sliding mode is enforced
• Advantage: simple
ControlLogic



Decoupling Approach to Enforce Sliding Mode
• Idea: to decouple motions in
• Method: non-singular transformation:
• Advantage: allows frequency analysis performed for each surface individually
ControlLogic
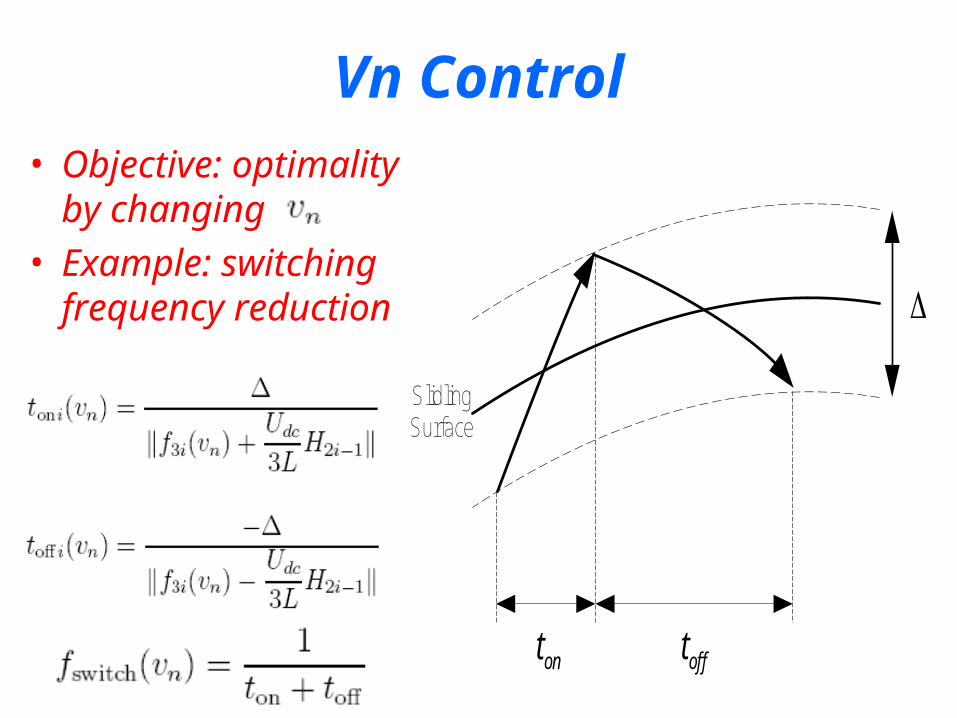
Vn Control• Objective: optimality
by changing• Example: switching
frequency reduction
ont offt
Slidling Surface

SMPWM Simulation Results
• Current tracking and vn tracking

Experimental Setup
• Controller: TMS320F2812 DSP• Switching devices: 2MBI100NC-12 IGBT• 3 phase RL load• 50 V DC supply
DSP Board
Full Bridge Converter
PWM Signal
DC Voltage
Current Measurements
Load

The first waveforms show the current tracking (and ), the second ones show tracking as a sinusoidal function by the average value of (after filtering out a high frequency component of discontinuous function ).









Related Documents











