DC Motor DC Motor Control Control Janet Klinkhachorn Janet Klinkhachorn Jeannine Meyers Jeannine Meyers Cheri Settell Cheri Settell December 6, 2002

DC Motor Control Janet Klinkhachorn Jeannine Meyers Cheri Settell December 6, 2002.
Dec 17, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

DC Motor ControlDC Motor ControlJanet KlinkhachornJanet Klinkhachorn
Jeannine MeyersJeannine Meyers
Cheri SettellCheri Settell
December 6, 2002

OverviewOverviewIntroductionIntroductionTheoryTheoryDesign ApproachDesign ApproachProcedureProcedureResultsResultsAnalysisAnalysisConclusionConclusion
December 6, 2002Janet KlinkhachornJanet Klinkhachorn

IntroductionIntroductionTaskTaskDC MotorsDC Motors
Electrical power into Electrical power into mechanical powermechanical power
Used for heavy duty Used for heavy duty applicationsapplications
DC Motor ComponentsDC Motor ComponentsStatorStatorRotorRotor
December 6, 2002Janet KlinkhachornJanet Klinkhachorn
http://www.prestoliteasia

TheoryTheoryVVff = R = RffIIff + L + LffdIdIff/dt/dt
VVtt = I = IaaRRaa + E + Eaa + +
LLaadIdIaa/dt/dt
Jdω / dt = TJdω / dt = Tee - T - TLL
EEaa = K = Kee * I * Iff *ω *ω
http://murry.newcastle.edu.au
December 6, 2002Janet KlinkhachornJanet Klinkhachorn

OverviewOverviewIntroductionIntroductionTheoryTheoryDesign ApproachDesign ApproachProcedureProcedureResultsResultsAnalysisAnalysisConclusionConclusion
December 6, 2002
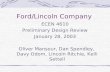
Design ApproachDesign ApproachInitial ConditionsInitial Conditions
Ke=0.33Ke=0.33Vf=150 VDC Vf=150 VDC Vt=100 VDCVt=100 VDCRa= 0.9 ΩRa= 0.9 Ω La= 0.01 HLa= 0.01 HRf= 75 ΩRf= 75 Ω Lf= 50 HLf= 50 HJ= 0.2 kgJ= 0.2 kgm2m2TL= 5 NTL= 5 Nmm
http://murry.newcastle.edu.au
December 6, 2002Jeannine Meyers

Design ApproachDesign ApproachMeasure If, Ia, E, Measure If, Ia, E, ωωChange Rf and LfChange Rf and Lf
Rf= 100 ΩRf= 100 ΩLf= 75 HLf= 75 HBoth Rf and LfBoth Rf and LfRf= 50 ΩRf= 50 ΩLf= 25 HLf= 25 HBoth Rf and LfBoth Rf and Lf
http://murry.newcastle.edu.au
December 6, 2002Jeannine Meyers

ProcedureProcedureDefinition of integralDefinition of integral
[i(t + Δt) – i(t)] / Δt[i(t + Δt) – i(t)] / ΔtCT to DTCT to DT
VVff = R = RffIIff + L + LffdIdIff/dt/dt VVtt = I = IaaRRaa + E + Eaa + L + LaadIdIaa/dt/dtJdω / dt = TJdω / dt = Tee - T - TLL EEaa = K = Kee * I * Iff *ω *ω
December 6, 2002Jeannine Meyers

ProcedureProcedureExampleExample
VVtt = I = IaaRRaa + E + Eaa + L + LaadIdIaa/dt/dt
dIdIa a / dt = [(V/ dt = [(Vtt – I – IaaRRaa – E – Eaa) / L) / Laa]]
[I[Iaa(t + Δt) – i(t + Δt) – iaa(t)] / Δt] = [(V(t)] / Δt] = [(Vtt – I – IaaRRaa – E – Eaa) / L) / Laa]]
IIaa(t + Δt) = i(t + Δt) = iaa(t) + Δt * [(V(t) + Δt * [(Vtt – I – IaaRRaa – E – Eaa) / L) / Laa]]
MatLab CodeMatLab CodeIa = I1 + dt*(Vt – (Ra*I1) – ea) / La Ia = I1 + dt*(Vt – (Ra*I1) – ea) / La
December 6, 2002Jeannine Meyers

OverviewOverview
IntroductionIntroductionTheoryTheoryDesign ApproachDesign ApproachProcedureProcedureResultsResultsAnalysisAnalysisConclusionConclusion
December 6, 2002Cheri Settell

ResultsResultsChange the value of field resistance Change the value of field resistance
and inductance by 25and inductance by 25Increase Rf Increase Rf Increase LfIncrease LfIncrease both Rf and LfIncrease both Rf and LfDecrease RfDecrease RfDecrease LfDecrease LfDecrease both Rf and LfDecrease both Rf and Lf
Cheri Settell December 6, 2002

Rf= 75 ΩRf= 75 Ω Lf= 50 H Lf= 50 H
Cheri Settell December 6, 2002

Rf= 100 Ω Lf= 50 HRf= 100 Ω Lf= 50 H
Cheri Settell December 6, 2002
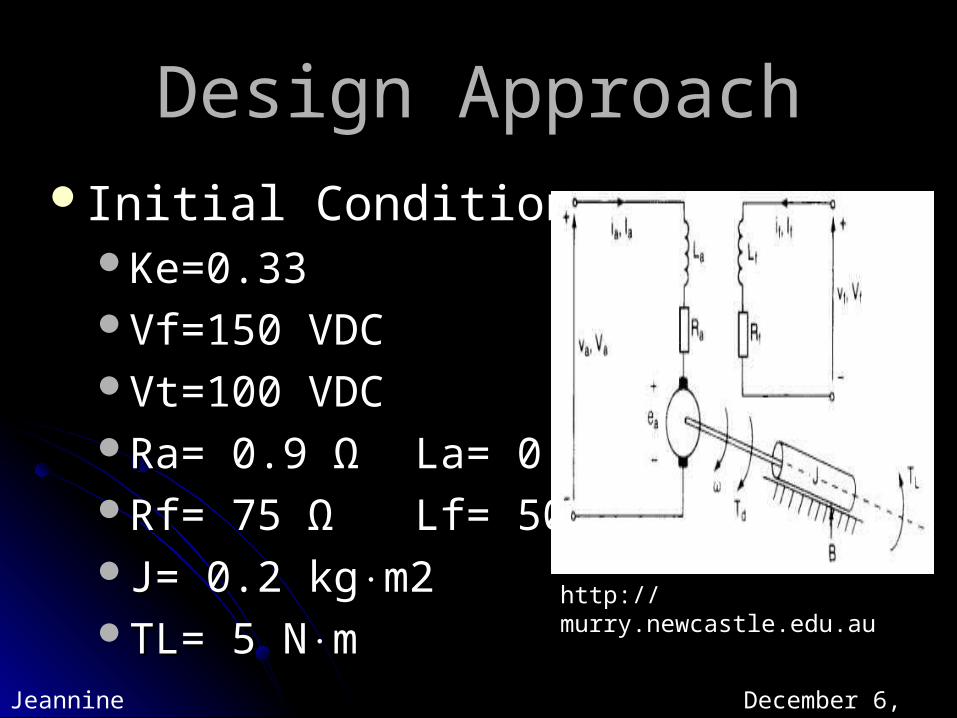
Rf= 75 Ω Lf= 75 HRf= 75 Ω Lf= 75 H
Cheri Settell December 6, 2002

Rf= 100 Ω Lf= 75 HRf= 100 Ω Lf= 75 H
Cheri Settell December 6, 2002

Rf= 50 Ω Lf= 50 HRf= 50 Ω Lf= 50 H
Cheri Settell December 6, 2002

Rf= 75 Ω Lf= 25 HRf= 75 Ω Lf= 25 H
Cheri Settell December 6, 2002

Rf= 50 Ω Lf= 25 HRf= 50 Ω Lf= 25 H
Cheri Settell December 6, 2002

Analysis of RfAnalysis of RfTime IC Rf inc Rf dec
Back emf 2.5 3.75 1.25
Field Current 3.75 2.5 5
Armature Current 2.5 3.75 2.5
Speed 1.9 3.75 1.25
Back emf 92 92 95
Field Current 2 1.5 3
Armature Current 115 115 115
Speed 140 180 99
Cheri Settell December 6, 2002
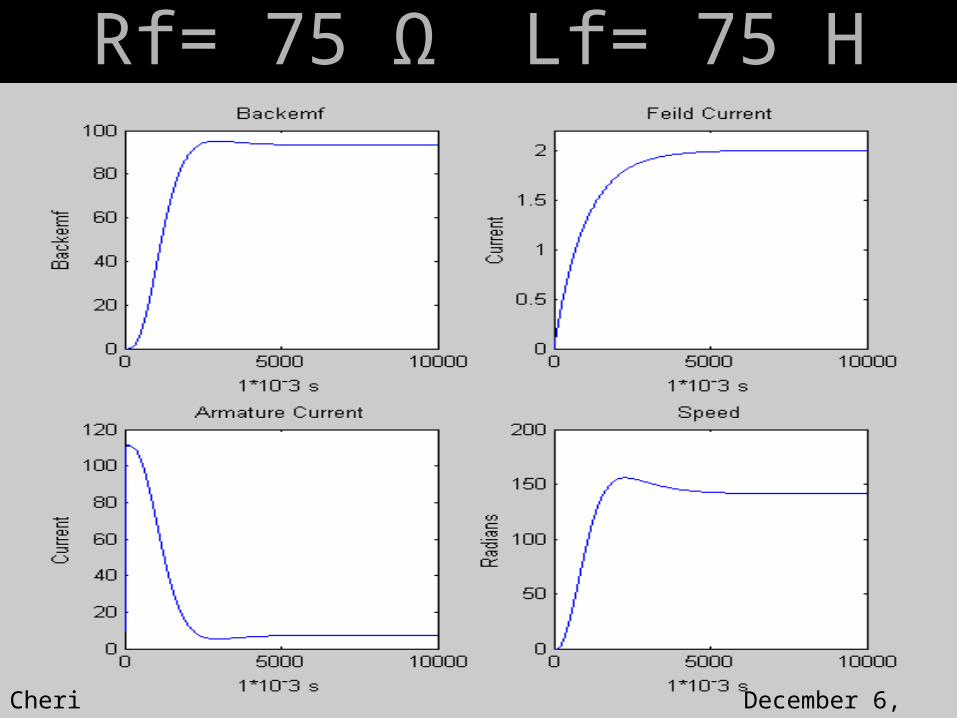
Analysis of LfAnalysis of LfTime IC Lf inc Lf dec
Back emf 2.5 2.5 1.9
Field Current 3.75 5 1.9
Armature Current 2.5 2.5 1.9
Speed 1.9 1.9 1.9
Back emf 92 95 95
Field Current 2 2 2
Armature Current 115 115 115
Speed 140 140 140
Cheri Settell December 6, 2002

Analysis of BothAnalysis of BothTime IC B inc B dec
Back emf 2.5 3.75 1.25
Field Current 3.75 3.75 2.5
Armature Current 2.5 3.75 1.26
Speed 1.9 3.75 1.25
Back emf 92 90 95
Field Current 2 1.5 3
Armature Current 115 115 115
Speed 140 185 98
Cheri Settell December 6, 2002

ConclusionConclusionSolutionsSolutions
Increase Rf to 100 ohmsIncrease Rf to 100 ohmsDecrease Lf to 25 ohmsDecrease Lf to 25 ohms
Team’s DecisionTeam’s DecisionLf = 25 ohms and Rf = 75 ohmsLf = 25 ohms and Rf = 75 ohms
Cheri Settell December 6, 2002

Questions?Questions?
Related Documents