Data smoothing Raymond Cuijpers

Data smoothing Raymond Cuijpers. Index The moving average Convolution The difference operator Fourier transforms Gaussian smoothing Butterworth filters.
Dec 21, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Data smoothing
Raymond Cuijpers

Index
• The moving average
• Convolution
• The difference operator
• Fourier transforms
• Gaussian smoothing
• Butterworth filters
0
1/3
i i+1i-1
Si
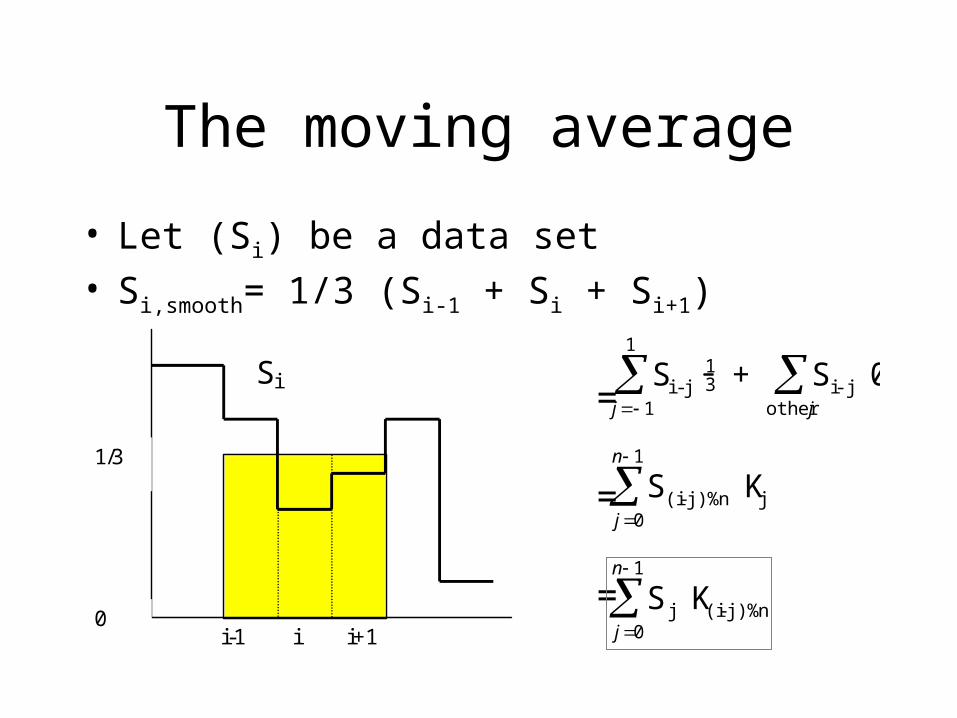
The moving average
• Let (Si) be a data set• Si,smooth= 1/3 (Si-1 + Si + Si+1)
=
=
=
Si - j 13
j 1
1
+ Si- j 0other j
S(i - j)%n Kjj 0
n 1
S j K(i - j)%nj 0
n 1

Convolution
Definition:
The moving average is the same as convoluting the signal with a block function !
S K (t) S(x)
K(t x)dx (continuous )
(S K)i Si K(j i)% nj0
n 1
(discrete )
Si
*MovingAverage =

Convolution
f * g = g * f
f * (g + h) = f * g + f * h
(f * g) * h = f * (g * h)
f * 0 = 0
But
1 * g ≠ g

The difference operatorThe velocity is the derivative of the displace-ment, for discrete signals this becomes the difference operator.
x(t)
t
v(t) x(t)
t(continuous )
vi x i1 xi
2(discrete )
-1/2
1/2
i i+1
Si • Discrete differentiation = convolution with difference operator
• Velocity estimated at i+1/2i
-1/2
1/2
i+1
Si
i-1
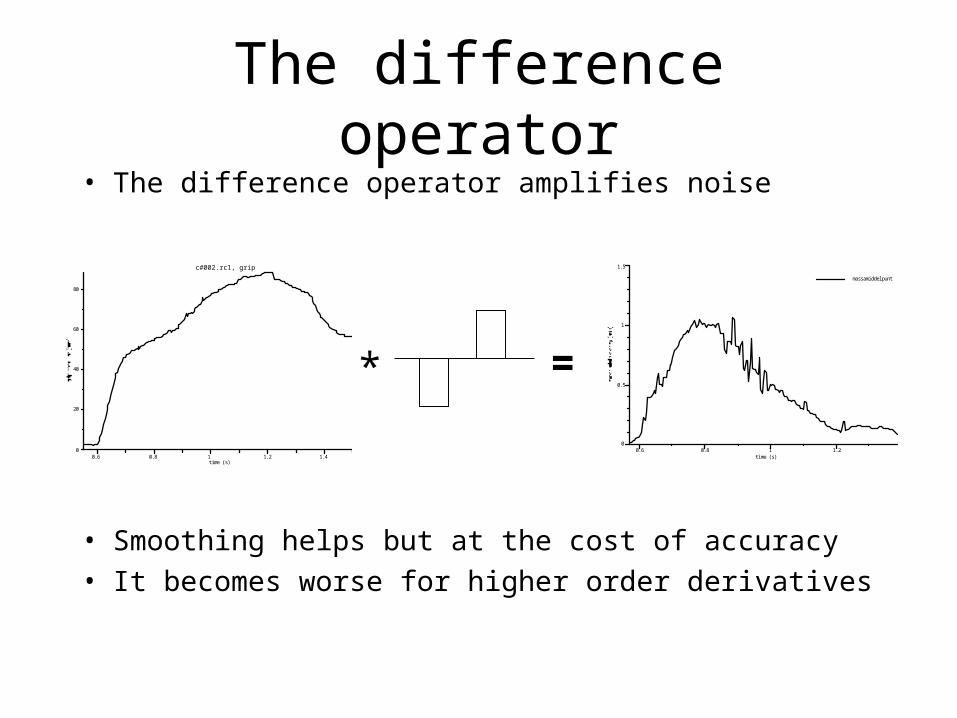
The difference operator• The difference operator amplifies noise
• Smoothing helps but at the cost of accuracy
• It becomes worse for higher order derivatives
0.6 0.8 1 1.2 1.4time (s)
0
20
40
60
80
c#002.rc1, grip
* =
0.6 0.8 1 1.2time (s)
0
0.5
1
1.5
massamiddelpunt

Differentiation and convolutiont
S * K (t) S( t)
t* K(t ) S(t) *
K(t )
t
Noisy
=
BAD
Exact
=
GOOD
• Differentiation by convolution with derivative

Fourier TransformsDefinition:
In the Fourier domain:• convolution becomes multiplication
• differentiation becomes multiplication with iw
F (S)() S(t)e i tdt
(continuous )
F (S)k Sr e2 i r k / n
r0
n 1
(discrete )
F (S K) F (S)F (K)
F (S' (t)) i F (S(t)) or 2 irF (Sk )

Fourier Transforms• Calculating convolutions using Fourier transforms is much
faster for large data sets than direct computation:
• There are many other transforms/expansions– Sine and Cosine transforms– Laplace transform– Legendre polynomials – Hermite polynomials (=Gaussian)– Bessel Functions– …
n
t n S K FFT 1 (2ik)n FFT (S) FFT (K)
Gaussian smoothingLet S(t) be a signal then the blurred signal is
Where is the Gaussian kernel
The derivative of a noisy S(t) is ill-posed, but
G(t, ) 1
2e
t 2
2 2
t
S(t) * G(t, ) S(t)
t*G(t, )
G(t, )
t* S(t)
Sblurred S(t)* G(t, )

Gaussian smoothingThe n-th order proper derivative of scale s is
So in the discrete case we get
n, S(t) S(t) * nG(t, )
tn
n , S(ti ) FFT -1 FFT S(t i) FFTnG(ti , )
t n

Gaussian Smoothing• Gaussian filters are the only 'natural' filters
Together they form a linearScale selective space of operators
0.6 0.8 1 1.2 1.4time (s)
0
20
40
60
80
c#002.rc1, grip
* =
0.6 0.8 1 1.2time (s)
0
0.5
1
1.5
massamiddelpunt
0.6 0.8 1 1.2 1.4time (s)
0
0.5
1
1.5
massamiddelpunt
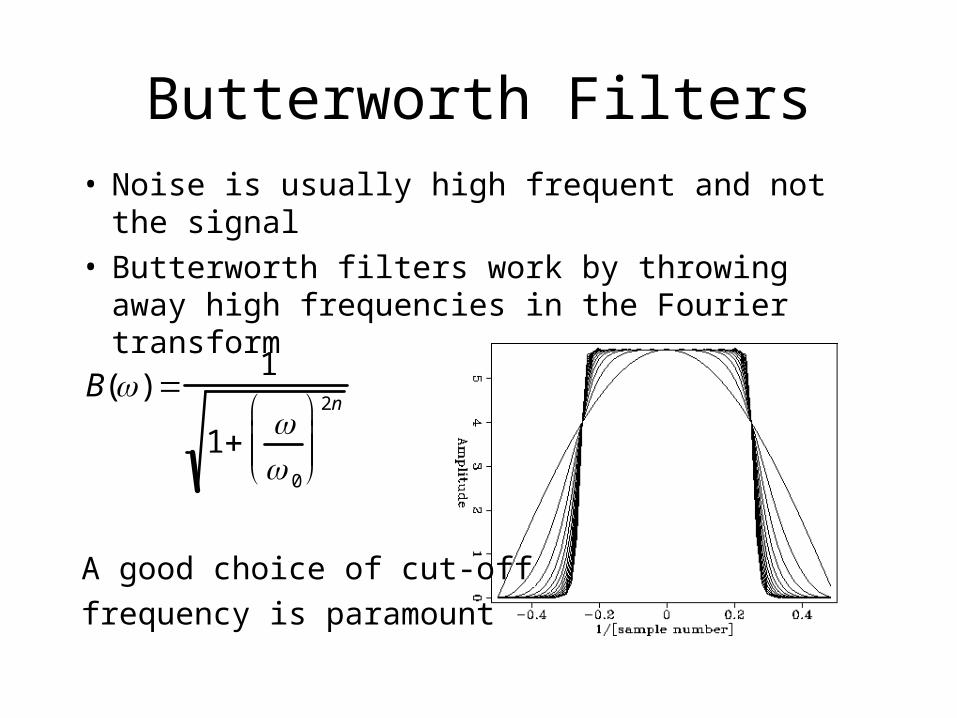
Butterworth Filters• Noise is usually high frequent and not the signal• Butterworth filters work by throwing away high
frequencies in the Fourier transform
A good choice of cut-off
frequency is paramount
B() 1
1 0
2n
Butterworth filtersAdvantage:• Easy to implement in electronic circuit
Disadvantage:• Introduces a phase shift. Solution is to apply it
twice in opposite directions• 'Ringing': jumps in the signal produces oscillations• Depends strongly on the nature of the noise and
the choice of cut-off frequency
Related Documents