1 BAB I FLUID POWER- INDUSTRIAL PNEUMATIC Tenaga Fluida-Industri Pneumatic A. Pendahuluan Pneumatic berasal dari bahasa Yunani yakni “Pneumos” yang artinya “tiupan”. Pengembangan sistem kerja pneumatic yang menerapkan prilaku gas yakni udara yang dimampatkan sehingga menghasilkan energy udara bertekanan yang memungkinkan dikembangkannya pesawat kerja dengan sumber energy tekanan udara atau “Fluid power” atau yang kita kenal sekarang sebagai teknologi pneumatic. Pengembangan Teknologi Pneumatic pada berbagai industry bukanlah hal yang baru terutama dalam pemanfaatan tenaga angin (udara yang bergerak), seperti perahu layar, kincir-kincir angin sebagai sumber energy pembangkit listrik dan lain-lain termasuk penghembusan udara kadalam dapur peleburan dalam pengolahan baja hingga pembentukan udara yang dimampatkan dengan energy tekanan yang lebih besar dan konstan yang dimulai tahun 1600 sejak Blaise Pascal yang melakukan percobaan pemberian tekanan atmosphere dan mendemotrasikannya dengan pompa tangan yang kemudian ditindaklanjuti oleh Evangilista Torriceli yang menggunakan Mercury Barometer dalam mengukur tekanan atmospheric yakni Torricellian Barometer yang kita kenali saat ini. Sekitar tahun 1650 Otto Von Guericke berkebangsaan Jerman merupakan orang yang pertama mendemontrasikan pompa udara hasil percobaannya, dan 12 tahun kemudian Robert Boyle melakukan penelitian tentang hubungan antara tekanan terhadap Volume pada temperature tetap dimana tekanan terjadi tekanan dua kali pada setiap setengah kali volumenya. Beberapa tahun kemudian yakni pada tahun 1738, Daniel Bernaulli mengembangkan teori perubahan tekanan dalam hubungannya dengan energy molecular, selanjutnya pada tahun 1738 juga diikuti oleh Jacques Charles yang melakukan percobaan gas dengan tekanan

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
1
BAB I
FLUID POWER- INDUSTRIAL
PNEUMATIC
Tenaga Fluida-Industri Pneumatic
A. Pendahuluan
Pneumatic berasal dari bahasa Yunani yakni “Pneumos” yang artinya “tiupan”.
Pengembangan sistem kerja pneumatic yang menerapkan prilaku gas yakni udara yang
dimampatkan sehingga menghasilkan energy udara bertekanan yang memungkinkan
dikembangkannya pesawat kerja dengan sumber energy tekanan udara atau “Fluid power”
atau yang kita kenal sekarang sebagai teknologi pneumatic.
Pengembangan Teknologi Pneumatic pada berbagai industry bukanlah hal yang baru
terutama dalam pemanfaatan tenaga angin (udara yang bergerak), seperti perahu layar,
kincir-kincir angin sebagai sumber energy pembangkit listrik dan lain-lain termasuk
penghembusan udara kadalam dapur peleburan dalam pengolahan baja hingga pembentukan
udara yang dimampatkan dengan energy tekanan yang lebih besar dan konstan yang dimulai
tahun 1600 sejak Blaise Pascal yang melakukan percobaan pemberian tekanan atmosphere
dan mendemotrasikannya dengan pompa tangan yang kemudian ditindaklanjuti oleh
Evangilista Torriceli yang menggunakan Mercury Barometer dalam mengukur tekanan
atmospheric yakni Torricellian Barometer yang kita kenali saat ini.
Sekitar tahun 1650 Otto Von Guericke berkebangsaan Jerman merupakan orang yang
pertama mendemontrasikan pompa udara hasil percobaannya, dan 12 tahun kemudian Robert
Boyle melakukan penelitian tentang hubungan antara tekanan terhadap Volume pada
temperature tetap dimana tekanan terjadi tekanan dua kali pada setiap setengah kali
volumenya.
Beberapa tahun kemudian yakni pada tahun 1738, Daniel Bernaulli mengembangkan teori
perubahan tekanan dalam hubungannya dengan energy molecular, selanjutnya pada tahun
1738 juga diikuti oleh Jacques Charles yang melakukan percobaan gas dengan tekanan
2
konstan dimana jumlahnya akan meningkat secara proporsional pada setiap perubahan
temperature.
Tahun 1849 merupakan tahun dimana saat pertama kali dikembangkannya teknologi
pneumatic modern yakni diterapkannya pneumatic power tool untuk pemecah batu bara
dalam skala besar di Francis yang dipusatkan di Paris.
B. Pneumatic System
Dewasa ini industri-industri telah memiliki “air supply” sendiri dan menggunakannya dalam
berbagai kebutuhan baik peralatan sederhana seperti power tool maupun pemesinan yang
sangat rumit, tergantung jenis industrinya. Tentunya menjadi pertanyaan “apakah alasan
pemakaian energy ini menjadi pilihan alternative sumber energy”, maka jawabannya adalah
pemakaian energy udara memiliki berbagai keunggulan, yaitu :
- Anti ledakan (explosion proof) sehingga tidak memerlukan perlindungan khusus
- System udara dapat beroperasi secara cepat dengan kecepatan hingga 10 m/sec.
- Mudah ditransmisikan dengan pipa pada jarak yang panjang
- System udara bersih dan tidak meninggalkan kotoran pada peralatan
- Tidak memerlukan saluran balik dimana pengeluaran udara kembali ke atmosphere
- System udara memiliki variable kecepatan dan tekanan dengan variable yang tidak
terbatas
- System pneumatic biayanya relative rendah.
Untuk melihat lebih rinci tentang System pneumatic ini akan kita lihat 3 pokok uraian
berikut, yakni :
- Hukum-hukum yang berlaku dalam system udara
- Proses produksi udara bertekanan
- Komponen dan sistem
1. Hukum-hukum yang berlaku dalam system udara
Udara yang digunakan pada system pneumatic adalah udara bebas yang diambil dari
atmosphere dan kemudian keluar dan kembali keatmosphere setelah selesai
dipergunakan. Kita lihat bahwa atmosphere ini terbentuk dari dua elemen yakni :
Oxygen 21 %
Nitrogen 78 %
Elemen asal 1 % , yakni, argon, helium, krypton dll
3
Sebagaimana kita ketahui bahwa udara merupakan campuran gas yang menyelimuti
permukaan bumi hingga ketinggian ± 50000 meter, pada bagian inilah dimana udara
memiliki masa sehingga udara selalu mendekati permukaan bumi, hal inilah awal
mulanya terjadi tekanan udara, penurunan tekanan bergantung pada ketinggian
permukaan bumi itu sendiri.
Yang dijadikan titik rujukan (reference point) ialah permukaan air laut dimana memilik
tekanan 101,32 kPa. Pada ketinggian 100 m diatas permukaan laut udara memiliki
tekanan 100 kPa, hal ini merupakan indikasi penurunan tekanan sebesar ± 1,3 kPa setiap
100 m. dan ini mengingatkan bahwa pada operasi compressor bertekanan tinggi maka
efisiensi menjadi turun.
Merujuk pada udara dalam hubungannya dengan pneumatic terdapat dua perbedaan
terminology yang kita gunakan yakni udara bebas ( “Free”air) dan udara normal
(“Normal air”) yang dapat didefinisikan sebagai berikut :
Udara bebas ( “Free”air) ialah udara pada kondisi atmosphere, dimana merupakan inti
perubahan tekanan, temperature serta kelembaban sebagai dasar meteorology
Udara normal (“Normal air”) ialah udara pada kondisi tekanan dan temperature serta
kelembaban standar, yakni 101,32 kPa, pada 200C dan 36% kelembaban.
Udara normal (“Normal air”) digunakan sebagai dasar perhitungan dalam perencanaan
komponen pneumatic, sedangkan Udara normal (“Normal air”) digunakan sebagai dasar
perhitungan efisiensi.
2. Pengukuran tekanan (Pressure measurement)
Pengukuran tekanan (Pressure measurement) dibutuhkan alat ukur yang disebut Pressure
gauges.
Pressure gauges modern hanya dapat mengukur tekanan udara diatas tekanan
atmosphere, tekanan yang terbaca pada pressure gauge dalam unit kPa.G. kebenaran
pengukuran dimulai dari Absolute Vacuum pembacaan berikutnya merupakan Absolute
pressure dalam kPa.abs.
Formulasi berikut merupakan analisis penentuan tekanan absolut, dimana
Absolut pressure=gauge pressure+ atmospheric pressure
4
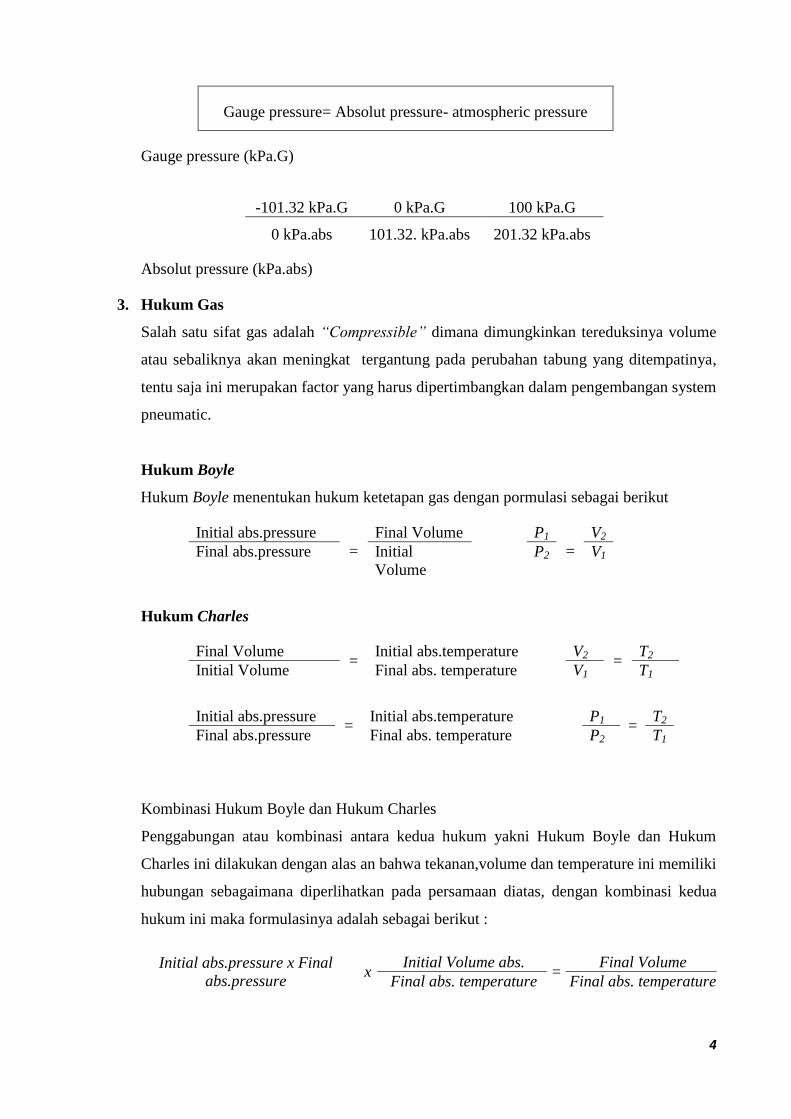
Gauge pressure= Absolut pressure- atmospheric pressure
Gauge pressure (kPa.G)
-101.32 kPa.G 0 kPa.G 100 kPa.G
0 kPa.abs 101.32. kPa.abs 201.32 kPa.abs
Absolut pressure (kPa.abs)
3. Hukum Gas
Salah satu sifat gas adalah “Compressible” dimana dimungkinkan tereduksinya volume
atau sebaliknya akan meningkat tergantung pada perubahan tabung yang ditempatinya,
tentu saja ini merupakan factor yang harus dipertimbangkan dalam pengembangan system
pneumatic.
Hukum Boyle
Hukum Boyle menentukan hukum ketetapan gas dengan pormulasi sebagai berikut
Initial abs.pressure
=
Final Volume P1
=
V2
Final abs.pressure Initial
Volume
P2 V1
Hukum Charles
Final Volume =
Initial abs.temperature V2 =
T2
Initial Volume Final abs. temperature V1 T1
Initial abs.pressure =
Initial abs.temperature P1 =
T2
Final abs.pressure Final abs. temperature P2 T1
Kombinasi Hukum Boyle dan Hukum Charles
Penggabungan atau kombinasi antara kedua hukum yakni Hukum Boyle dan Hukum
Charles ini dilakukan dengan alas an bahwa tekanan,volume dan temperature ini memiliki
hubungan sebagaimana diperlihatkan pada persamaan diatas, dengan kombinasi kedua
hukum ini maka formulasinya adalah sebagai berikut :
Initial abs.pressure x Final
abs.pressure x
Initial Volume abs. =
Final Volume
Final abs. temperature Final abs. temperature

5
atau
P1 x V1 =
P2 x V2
T1 T2
Tekanan Adiabatic dan Isothermal
Berdasarkan ketentuan yang berlaku pada hukum Boyle yaitu :
P1 x V1 = P2 x V2 (siklus Isothermal)
P1 x( V1) P2 x (V2)
(siklus Adiabatic)
Dengan formulasi yang memasukan factor panas, maka :
Panas pada tekanan konstan spesifik = Cp Dimana :
Cp =
Panas pada Volume konstan spesifik = Cv Cv
Cp = 0,24 so = 1,4
Cv = 0,17
6
BAB II
PEMBUATAN UDARA BERTEKANAN
Compressed Air Production
Udara bertekanan merupakan sumber energy pneumatic yang harus tersedia dan
mencukupi kebutuhan semua kelengkapan serta kondisi unit serta memenuhi persyaratan standar
yang ditentukan, antara lain memiliki tekanan dan Volume yang memadai, udara yang bersih dan
relative kering.
Udara yang demikian ini akan diproses melalui compressor udara dengan menggunakan energy
lain yang diperoleh dari berbagai sumber, misalnya tenaga listrik, motor bakar dan lain-lain yang
dikonversi menjadi penggerak mekanik.
A. Unit Generator Udara Bertekanan (Compressor)
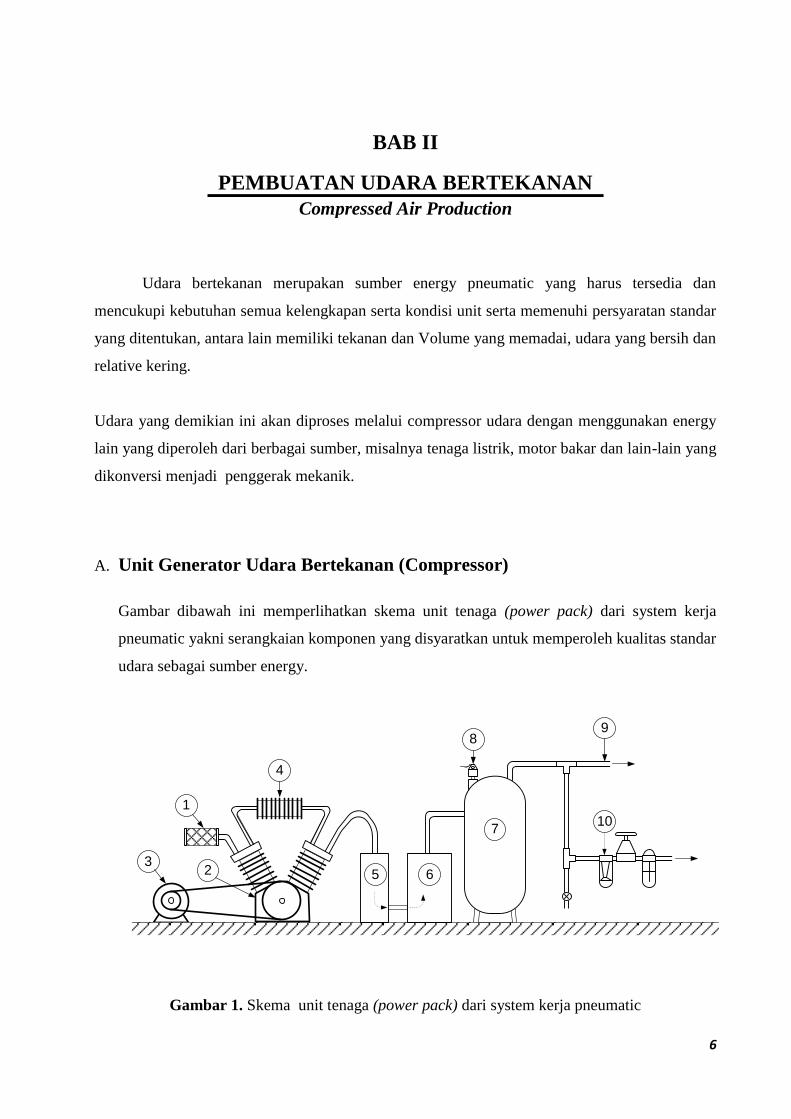
Gambar dibawah ini memperlihatkan skema unit tenaga (power pack) dari system kerja
pneumatic yakni serangkaian komponen yang disyaratkan untuk memperoleh kualitas standar
udara sebagai sumber energy.
1
23
4
5 6
7
89
10
Gambar 1. Skema unit tenaga (power pack) dari system kerja pneumatic
7
Dari gambar 1 diatas menunjukan Skema unit tenaga (power pack) dengan komponen-
komponen yang terdiri atas :
1. Filter udara (air filter)
2. Kompresor udara(air compressor)
3. Motor
4. Pendingin (intercooler)
5. Aftercooler
6. Pengering (dryer)
7. Receiver tank
8. Safety valve
9. Pipa saluran utama
10. Cervice unit
B. Uraian kerja unit tenaga (power pack) pada system pneumatic
Proses pemampatan udara diisap kedalam pompa melalui filter (1) hal ini dilakukan agar
udara yang diproses berada dalam keadaan terbebas dari debu dan partikel kotoran lainnya
yang kemudian akan dimampatkan didalam compressor yang bekerja secara rotary atau
maju/mundur (reciprocating) tergantung system kerja kompresor tersebut (2) yang digerakan
oleh motor (3), untuk jenis kompresor double cylinder sebagaimana diperlihatkan pada
gambar 1 udara bertekanan dari cylinder 1 dialirkan melalui incooler (4) untuk didinginkan
dan masuk kecylinder 2 yang kemudian akan dialirkan ke aftercooler (5) untuk pendinginan
yang selanjutnya akan dialirkan ke dryer (6) untuk mengeringkan udara tersebut. Selanjutnya
udara ditampung didalam Receiver tank (7) dengan tekanan yang dikendalikan oleh Safety
valve (8) untuk menghindari terjadinya kelebihan tekanan (overpressure).
Tekanan udara ini selanjutnya dialirkan ke pipa utama (9) dan udara yang akan masuk
kedalam system akan dikontrol didalam Cervice unit (10) sebagai pengendali kualitas dan
tekanan udara yang diperlukan didalam system pneumatic dimana Cervice unit ini memiliki
fungsi pengatur tekanan, pembersih udara dan penyedian pelumas yang akan mengalir
dibawa oleh udara kedalam system pneumatic.
8
C. Graphic representation
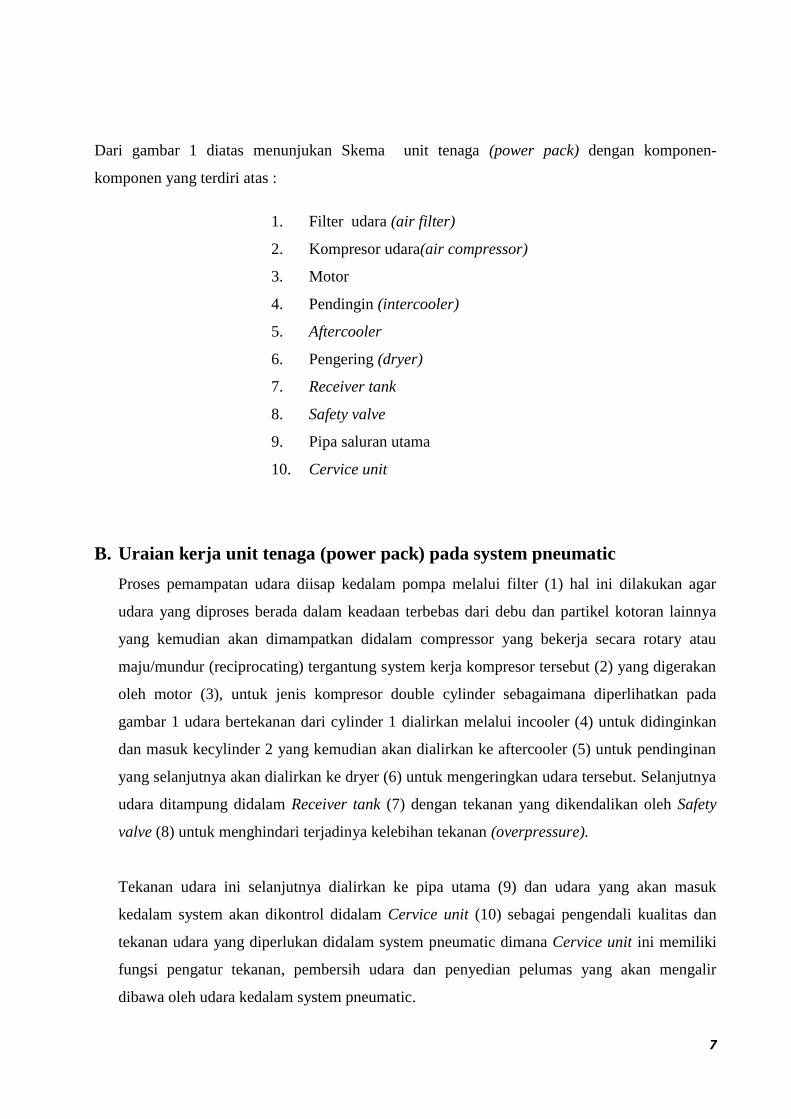
Skema unit tenaga (power pack) dari system kerja pneumatic sebagaimana diperlihatkan
diatas dalam perencanaan system pneumatic tidak digambarkan seperti skema yang
diperlihatkan pada gambar 1 melainkan ditampilkan dalam bentuk graphis dan symbol-
symboll yang telah ditentukan menurut standar; AS1101 Part1-1982 Graphic symbol for
General Engineering-hydraulic and Pneumatic (akan dibahas pada uraian berikutnya).
Symbol-symbol komponen hydraulic dan pneumatic (penggunaan symbol-symbol hydraulic
dan pneumatic sama) sebagaimana ditentukan dalam standar tersebut digunakan dalam
semua komponen hydraulic dan pneumatic termasuk unit tenaga (power pack), Control
system seperti valve hingga elemen kerja (working element) yakni actuator dan lain-lain.
Pada gambar 2 berikut diperlihatkan graphic symbol dari air production unit atau unit
tenaga (power pack) dari system kerja pneumatic menurut gambar 1.
12
3
4
5
67
8 9
10
M
Gambar 2 Sirkuit diagram symbol unit tenaga (power pack)
dari system kerja pneumatic
9
D. Komponen unit tenaga (power pack)
Komponen unit tenaga (power pack) dari system kerja pneumatic secara rinci dapat dilihat
pada uraian berikut.
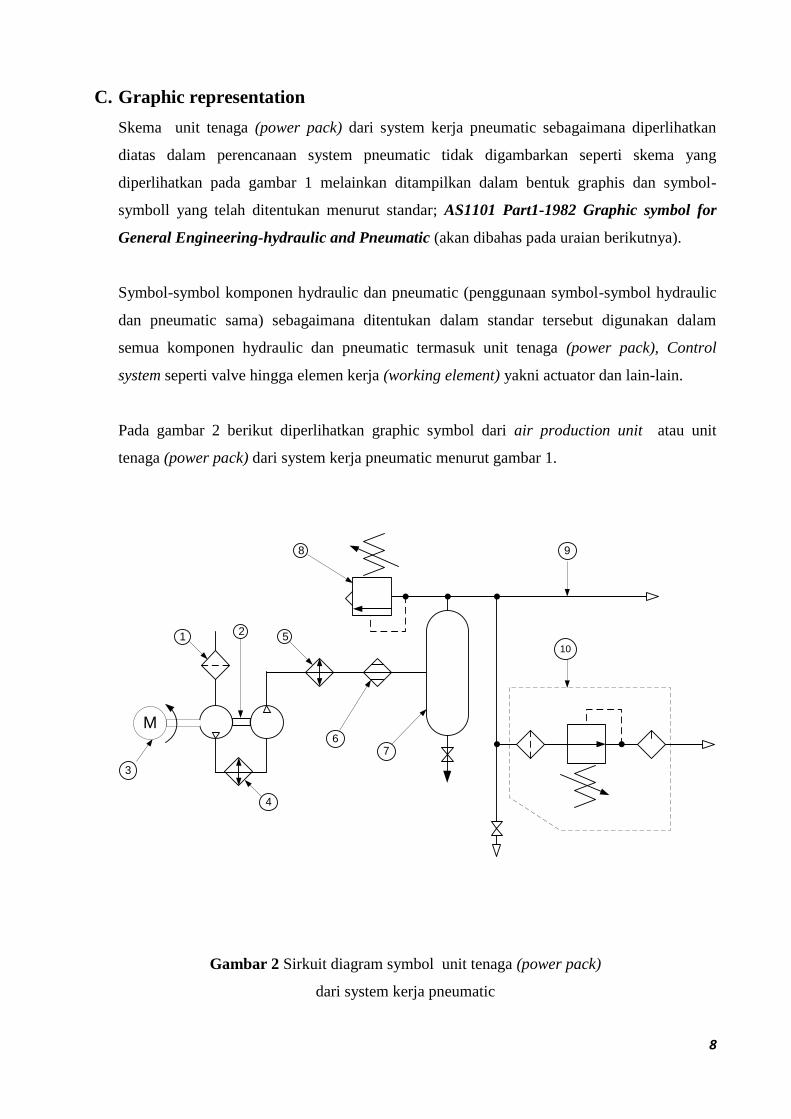
E. Kompresor udara (air compressor)
Kompresor udara (air compressor) yang digunakan pada uni tenaga ini sangat bervariasi dari
ukuran atau kapasitasnya serta desain dan system kerjanya, lihat gambar berikut.
Air compressor
Positive Non positive
Reciprocating Rotary Axial Radial
Single stage Multiple stage
Vane
Impellor
Liquid piston
Screw
Diaphragm
Single stage
Multiple stage
Gambar 3 Type Kompresor Udara
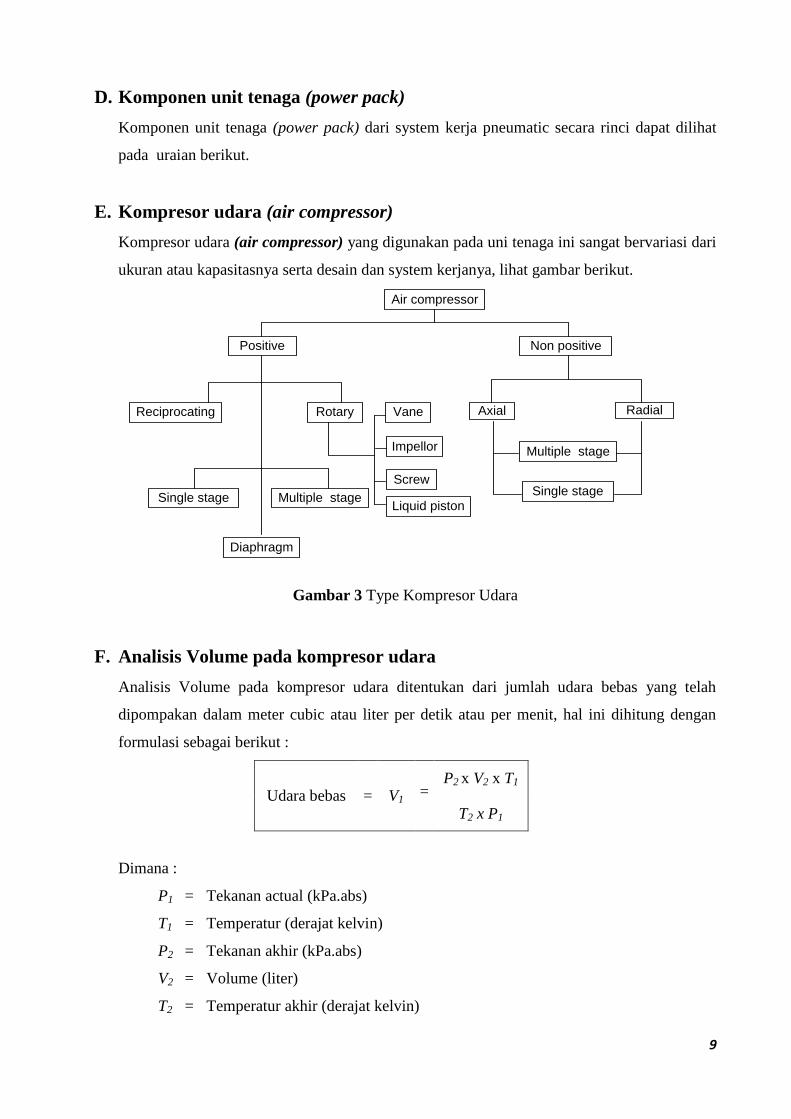
F. Analisis Volume pada kompresor udara
Analisis Volume pada kompresor udara ditentukan dari jumlah udara bebas yang telah
dipompakan dalam meter cubic atau liter per detik atau per menit, hal ini dihitung dengan
formulasi sebagai berikut :
Udara bebas = V1 = P2 x V2 x T1
T2 x P1
Dimana :
P1 = Tekanan actual (kPa.abs)
T1 = Temperatur (derajat kelvin)
P2 = Tekanan akhir (kPa.abs)
V2 = Volume (liter)
T2 = Temperatur akhir (derajat kelvin)
10
Formulasi tersebut merupakan aliran udara actual dari kompresor walaupun kerapkali
dipengaruhi pula oleh kecepatan, sehingga formulasinya menjadi,
D = L x A x N M3/min
Dimana :
D = Displacement (M3/min)
A = Luas silinder (m2)
L = Jarak Langkah (m)
N = Jumlah langkah per menit
Volumetric effisiensy dapat dihitung dengan,
Volumetric
effisiensy =
Volume Udara yang masuk
Volume teoritis
G. Kebutuhan daya pada kompresor
Untuk mempersiapkan daya yang diperlukan untuk sebuah kompresor dengan kapasitas
tertentu yang dikehendaki dapat dihitung dengan menggunakan Formulasi berikut :
Power (kW) = P1 x V x n x ( P2 )
n-1
-1 n
60000 (n-1) P1
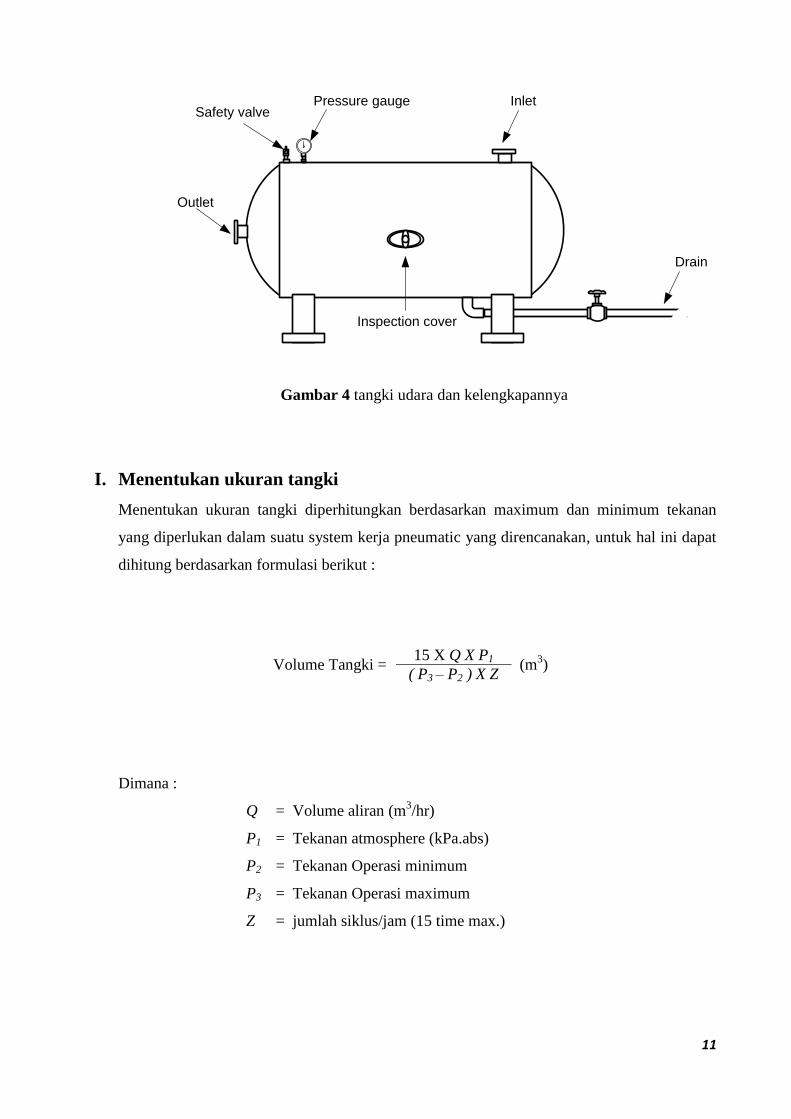
H. Penampungan udara (tangki udara)
Udara bertekanan yang akan digunakan pada sisitem pneumatic terlebih dahulu ditampung
didalam sebuah tangki dengan kapasitas dan kualitas sesuai dengan standar yang ditentukan,
gambar 4 berikut memperlihatkan bentuk serta kelengkapan standar yang harus dimiliki oleh
tangki udara.
11
Pressure gaugeSafety valve
Outlet
Inlet
Drain
Inspection cover
Gambar 4 tangki udara dan kelengkapannya
I. Menentukan ukuran tangki
Menentukan ukuran tangki diperhitungkan berdasarkan maximum dan minimum tekanan
yang diperlukan dalam suatu system kerja pneumatic yang direncanakan, untuk hal ini dapat
dihitung berdasarkan formulasi berikut :
Volume Tangki = 15 X Q X P1
(m3)
( P3 – P2 ) X Z
Dimana :
Q = Volume aliran (m3/hr)
P1 = Tekanan atmosphere (kPa.abs)
P2 = Tekanan Operasi minimum
P3 = Tekanan Operasi maximum
Z = jumlah siklus/jam (15 time max.)
12
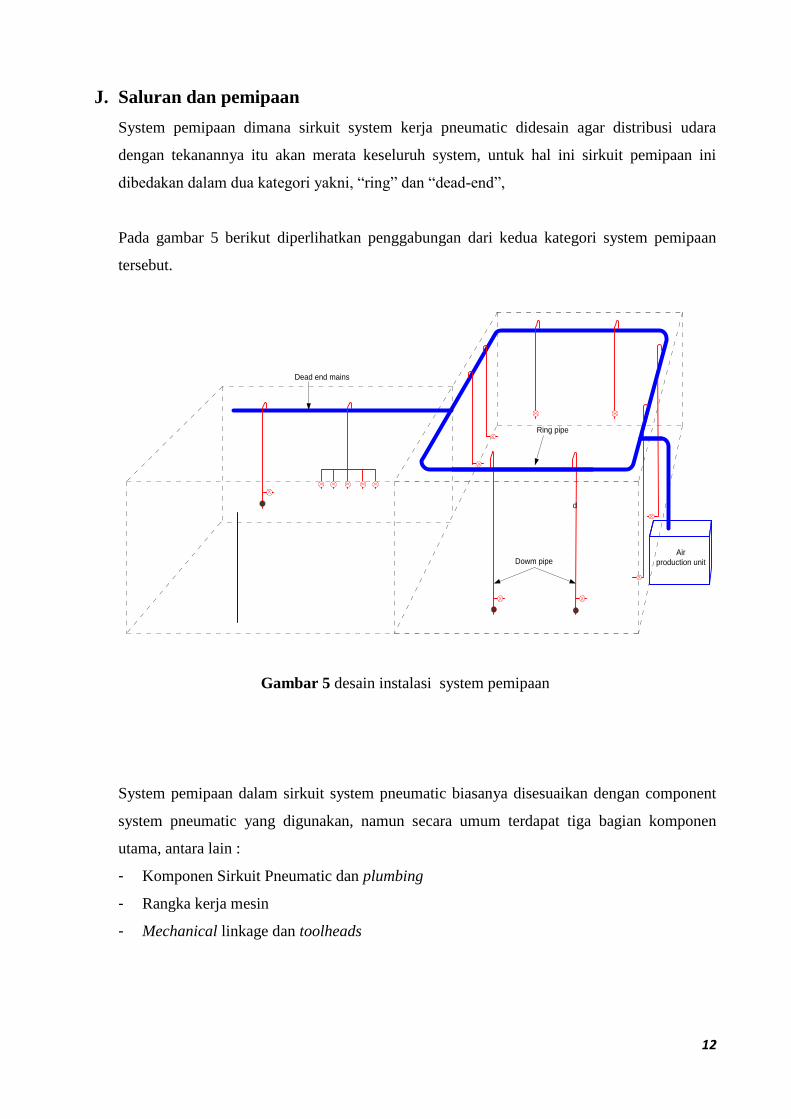
J. Saluran dan pemipaan
System pemipaan dimana sirkuit system kerja pneumatic didesain agar distribusi udara
dengan tekanannya itu akan merata keseluruh system, untuk hal ini sirkuit pemipaan ini
dibedakan dalam dua kategori yakni, “ring” dan “dead-end”,
Pada gambar 5 berikut diperlihatkan penggabungan dari kedua kategori system pemipaan
tersebut.
Air
production unit
d
Dowm pipe
Ring pipe
Dead end mains
Gambar 5 desain instalasi system pemipaan
System pemipaan dalam sirkuit system pneumatic biasanya disesuaikan dengan component
system pneumatic yang digunakan, namun secara umum terdapat tiga bagian komponen
utama, antara lain :
- Komponen Sirkuit Pneumatic dan plumbing
- Rangka kerja mesin
- Mechanical linkage dan toolheads
13
K. Komponen sirkuit dasar
Komponen sirkuit dasar dapat dikelompokkan menjadi 3 kategori yhakni,
- Actuator
- Directional valve dan
- Ancillary valve
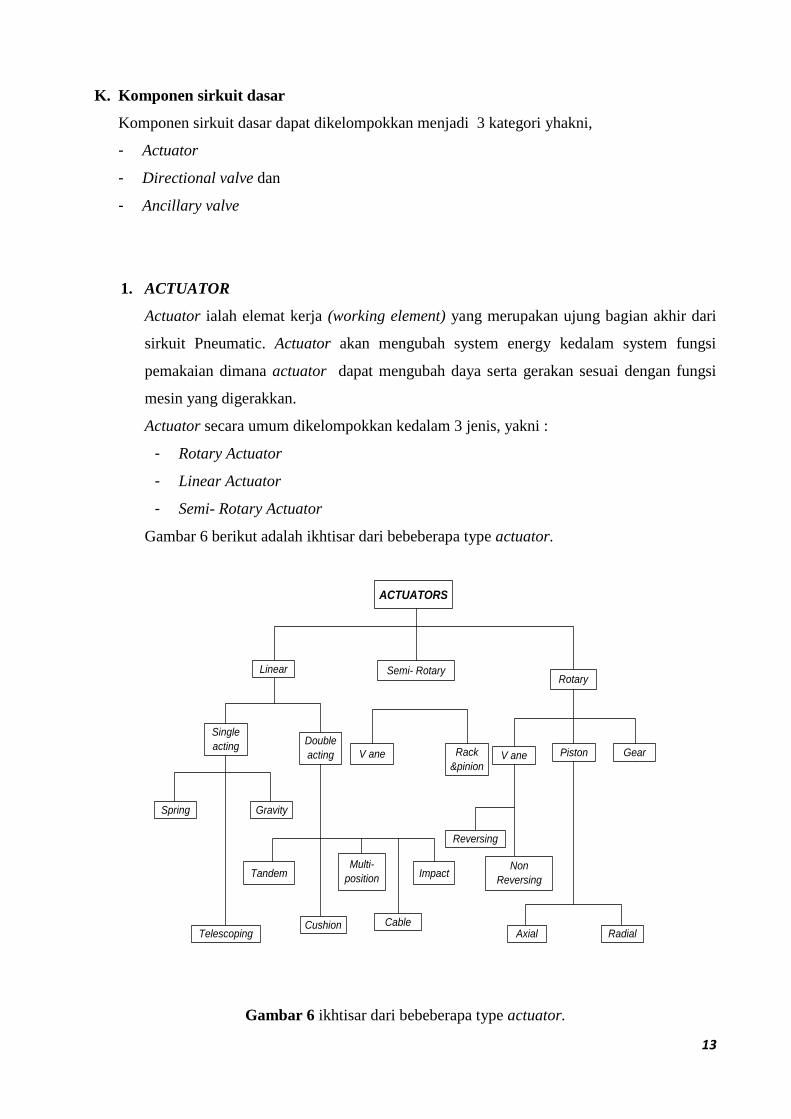
1. ACTUATOR
Actuator ialah elemat kerja (working element) yang merupakan ujung bagian akhir dari
sirkuit Pneumatic. Actuator akan mengubah system energy kedalam system fungsi
pemakaian dimana actuator dapat mengubah daya serta gerakan sesuai dengan fungsi
mesin yang digerakkan.
Actuator secara umum dikelompokkan kedalam 3 jenis, yakni :
- Rotary Actuator
- Linear Actuator
- Semi- Rotary Actuator
Gambar 6 berikut adalah ikhtisar dari bebeberapa type actuator.
ACTUATORS
Semi- Rotary Rotary
Linear
V ane Piston Gear
Axial Radial
Reversing
Non
Reversing
Rack
&pinionV ane
Single
actingDouble
acting
Spring Gravity
Telescoping Cushion
Tandem Multi-
positionImpact
Cable
Gambar 6 ikhtisar dari bebeberapa type actuator.
14
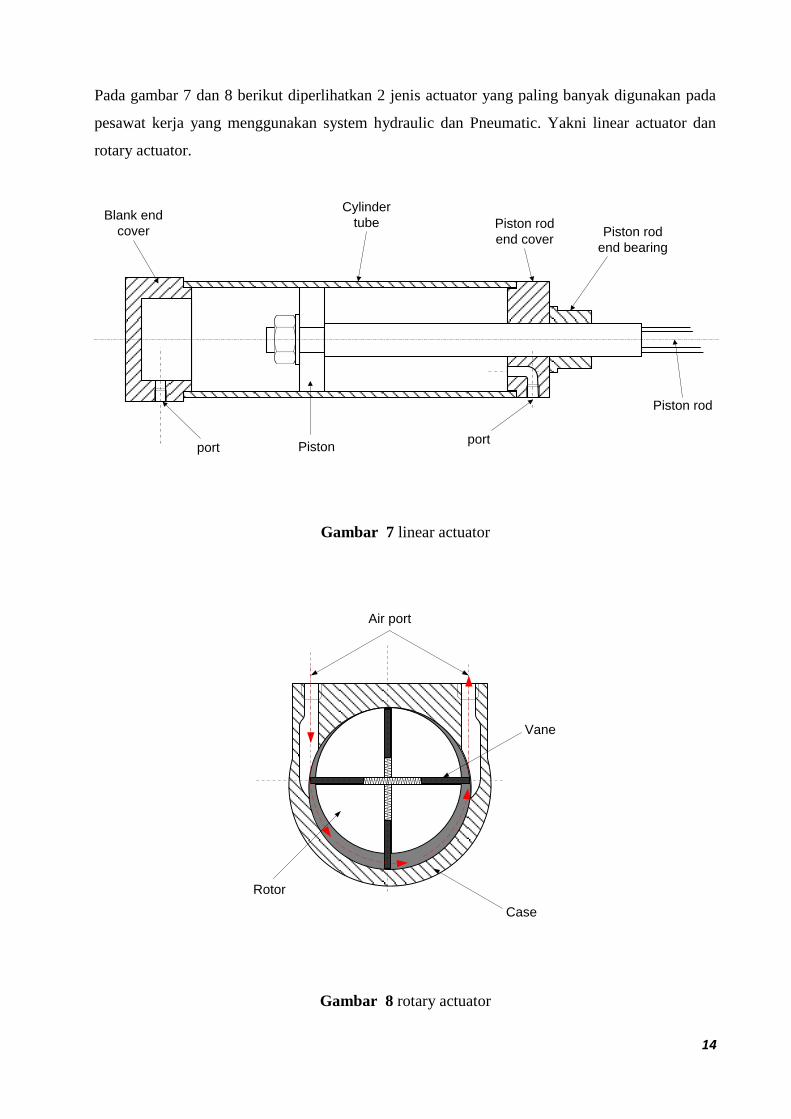
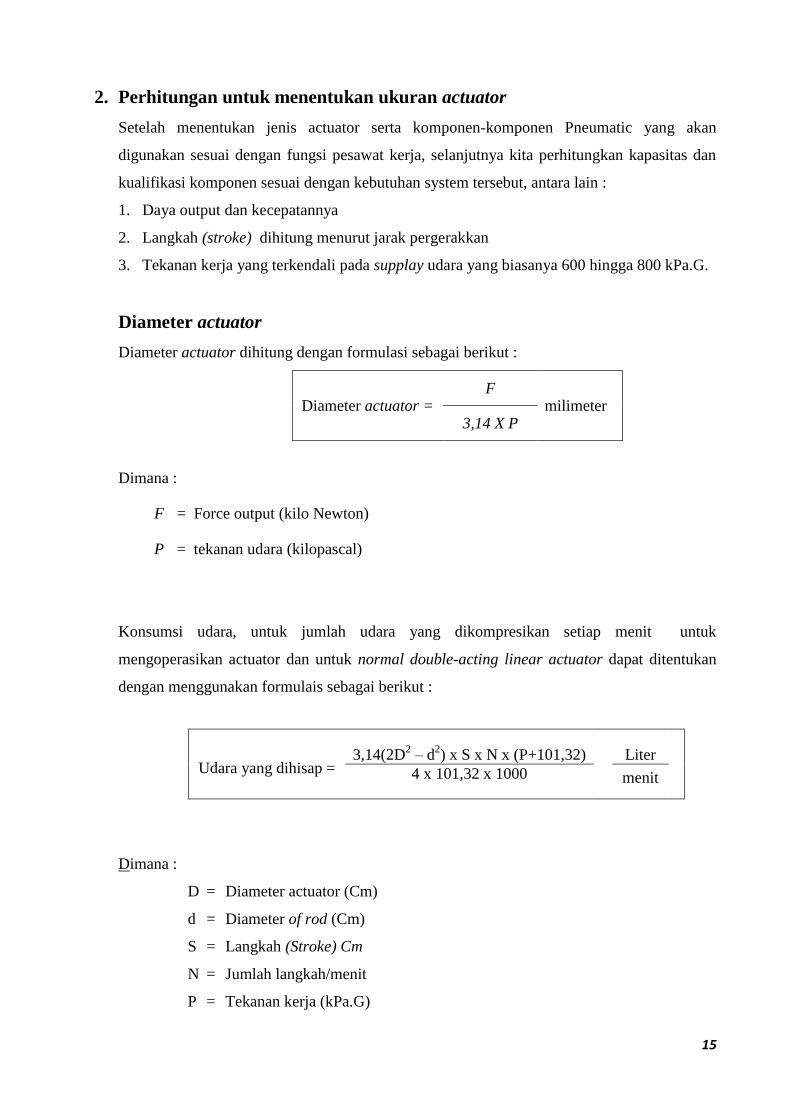
Pada gambar 7 dan 8 berikut diperlihatkan 2 jenis actuator yang paling banyak digunakan pada
pesawat kerja yang menggunakan system hydraulic dan Pneumatic. Yakni linear actuator dan
rotary actuator.
Blank end
cover
Cylinder
tube
Piston port
port
Piston rod
Piston rod
end bearing
Piston rod
end cover
Gambar 7 linear actuator
Vane
Case
Rotor
Air port
Gambar 8 rotary actuator
15
2. Perhitungan untuk menentukan ukuran actuator
Setelah menentukan jenis actuator serta komponen-komponen Pneumatic yang akan
digunakan sesuai dengan fungsi pesawat kerja, selanjutnya kita perhitungkan kapasitas dan
kualifikasi komponen sesuai dengan kebutuhan system tersebut, antara lain :
1. Daya output dan kecepatannya
2. Langkah (stroke) dihitung menurut jarak pergerakkan
3. Tekanan kerja yang terkendali pada supplay udara yang biasanya 600 hingga 800 kPa.G.
Diameter actuator
Diameter actuator dihitung dengan formulasi sebagai berikut :
Diameter actuator = F
milimeter 3,14 X P
Dimana :
F = Force output (kilo Newton)
P = tekanan udara (kilopascal)
Konsumsi udara, untuk jumlah udara yang dikompresikan setiap menit untuk
mengoperasikan actuator dan untuk normal double-acting linear actuator dapat ditentukan
dengan menggunakan formulais sebagai berikut :
Udara yang dihisap = 3,14(2D
2 – d
2) x S x N x (P+101,32)
Liter
4 x 101,32 x 1000 menit
Dimana :
D = Diameter actuator (Cm)
d = Diameter of rod (Cm)
S = Langkah (Stroke) Cm
N = Jumlah langkah/menit
P = Tekanan kerja (kPa.G)
16
3. Directional Control Valve (DCV)
Actuator yang merupakan elemen kerja dan memberikan energy output serta
mengkonversinya dalam bentuk gerak-gerak mekanik dalam satu unit pesawat kerja bias
terdiri atas beberapa Actuator dengan arah dan waktu yang berbeda sesuai dengan fungsi
kerja dari pesawat kerja tersebut. Untuk pengatur fungsi gerakan ini maka diperlukan valve
yang dapat mengarahkan tekanan udara tadi untuk waktu yang dikehendaki, hal inilah yang
menjadi fungsi utama dari Directional Control Valve, tentu saja dengan fungsi gerakan dari
actuator yang bervariasi, maka Directional Control Valve juga mengalirkan tekanan tadi
melalui Directional Control Valve yang lain atau melalui ancilliary valves dan lain-lain.
Proses kerja yang rumit dari sebuah sirkuit ini dirancang dengan tata kerja dalam gerbang
logika (logical gate). Directional Control Valve yang dikenal dengan DCV terdapat dalam
beberapa kelompok yang dibedakan menurut posisi dan keadaan normalnya, yaitu :
1. Jumlah posisi atau jumlah variasi saluran outputnya.
2. Kedaan saluran dimana jumlah saluran masuk atau keluar
3. System kerja dan cara pengoperasiannya.
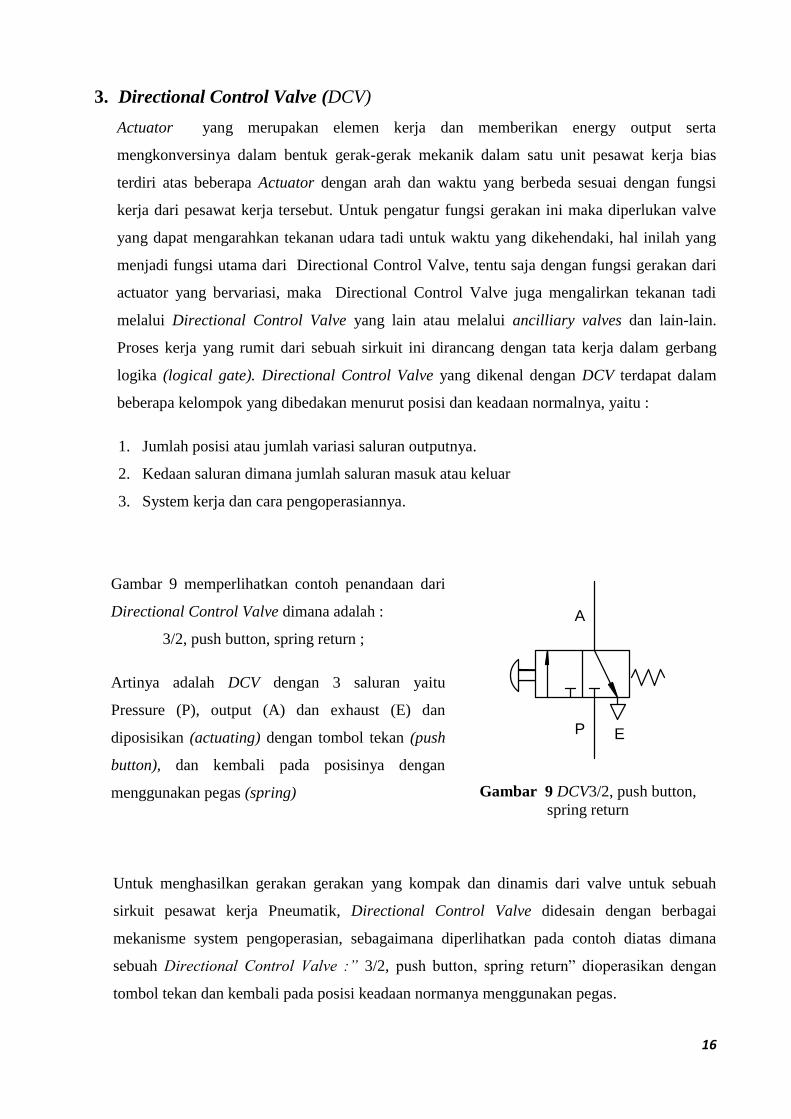
Gambar 9 memperlihatkan contoh penandaan dari
Directional Control Valve dimana adalah :
3/2, push button, spring return ;
Artinya adalah DCV dengan 3 saluran yaitu
Pressure (P), output (A) dan exhaust (E) dan
diposisikan (actuating) dengan tombol tekan (push
button), dan kembali pada posisinya dengan
menggunakan pegas (spring)
A
P E
Gambar 9 DCV3/2, push button,
spring return
Untuk menghasilkan gerakan gerakan yang kompak dan dinamis dari valve untuk sebuah
sirkuit pesawat kerja Pneumatik, Directional Control Valve didesain dengan berbagai
mekanisme system pengoperasian, sebagaimana diperlihatkan pada contoh diatas dimana
sebuah Directional Control Valve :” 3/2, push button, spring return” dioperasikan dengan
tombol tekan dan kembali pada posisi keadaan normanya menggunakan pegas.
17
Tentu saja ini salah satu variasi gerakan memerlukan berbagai system kerja. Untuk itu ikhtisar
berikut memperlihatkan berbagai system penggerak dari Directional Control Valve
Manual opertion
Hand lever
Foot pedal
Push button
Mechanical opertion
Plunger
Roller lever
Spring
Electrical opertion
Solenoid
Applied pressure
Air pilot opertion
Released pressure
Gambar 10 skema metode pengoperasian gerakan valve
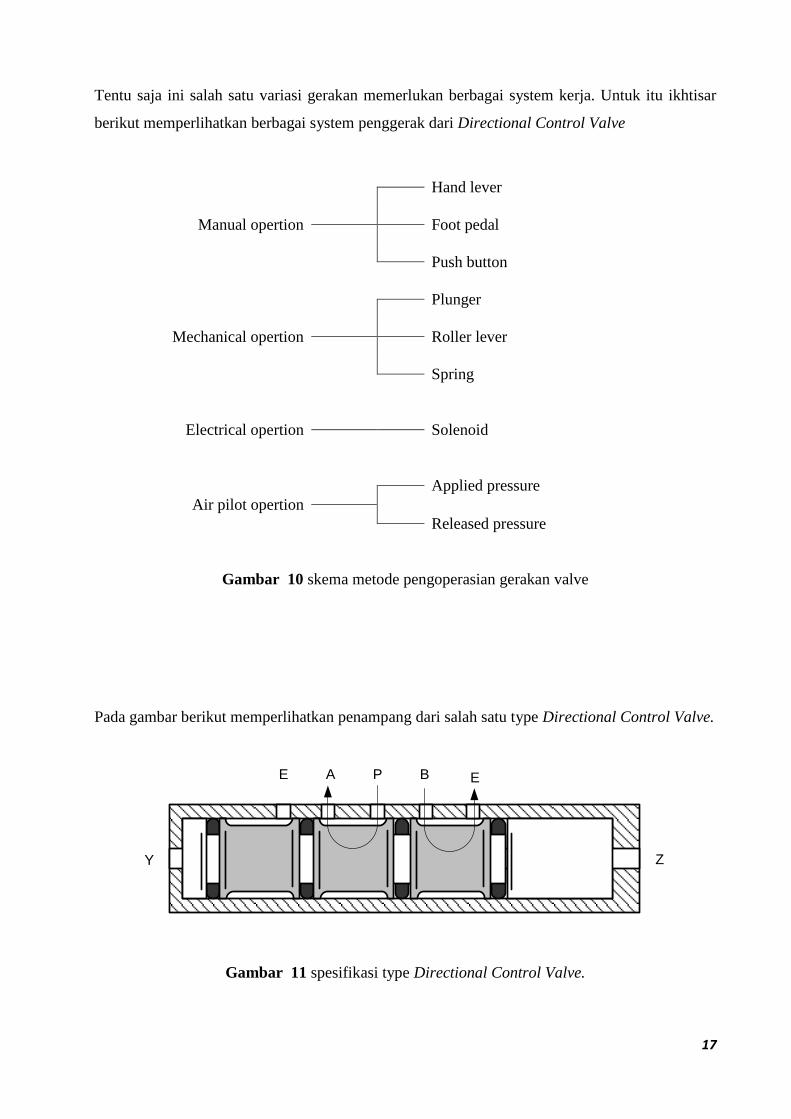
Pada gambar berikut memperlihatkan penampang dari salah satu type Directional Control Valve.
E A P B E
Y Z
Gambar 11 spesifikasi type Directional Control Valve.
18
A P B
E
Y Z
E
A
P
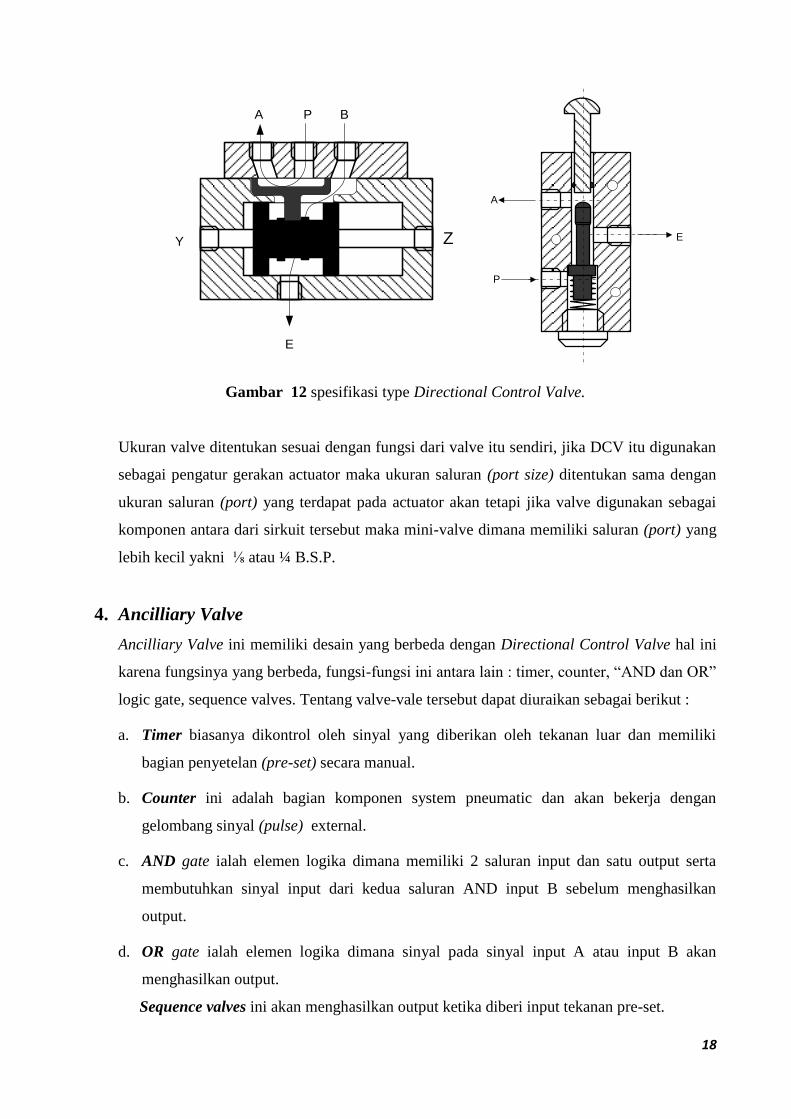
Gambar 12 spesifikasi type Directional Control Valve.
Ukuran valve ditentukan sesuai dengan fungsi dari valve itu sendiri, jika DCV itu digunakan
sebagai pengatur gerakan actuator maka ukuran saluran (port size) ditentukan sama dengan
ukuran saluran (port) yang terdapat pada actuator akan tetapi jika valve digunakan sebagai
komponen antara dari sirkuit tersebut maka mini-valve dimana memiliki saluran (port) yang
lebih kecil yakni ⅛ atau ¼ B.S.P.
4. Ancilliary Valve
Ancilliary Valve ini memiliki desain yang berbeda dengan Directional Control Valve hal ini
karena fungsinya yang berbeda, fungsi-fungsi ini antara lain : timer, counter, “AND dan OR”
logic gate, sequence valves. Tentang valve-vale tersebut dapat diuraikan sebagai berikut :
a. Timer biasanya dikontrol oleh sinyal yang diberikan oleh tekanan luar dan memiliki
bagian penyetelan (pre-set) secara manual.
b. Counter ini adalah bagian komponen system pneumatic dan akan bekerja dengan
gelombang sinyal (pulse) external.
c. AND gate ialah elemen logika dimana memiliki 2 saluran input dan satu output serta
membutuhkan sinyal input dari kedua saluran AND input B sebelum menghasilkan
output.
d. OR gate ialah elemen logika dimana sinyal pada sinyal input A atau input B akan
menghasilkan output.
Sequence valves ini akan menghasilkan output ketika diberi input tekanan pre-set.
19
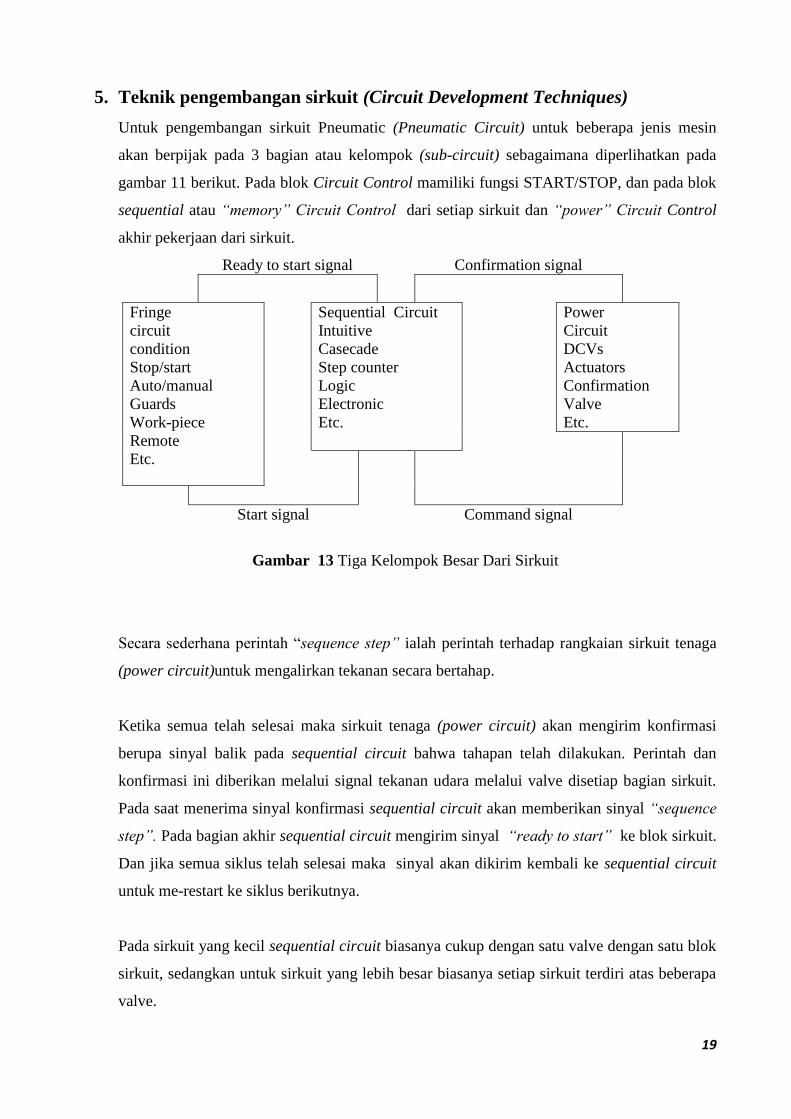
5. Teknik pengembangan sirkuit (Circuit Development Techniques)
Untuk pengembangan sirkuit Pneumatic (Pneumatic Circuit) untuk beberapa jenis mesin
akan berpijak pada 3 bagian atau kelompok (sub-circuit) sebagaimana diperlihatkan pada
gambar 11 berikut. Pada blok Circuit Control mamiliki fungsi START/STOP, dan pada blok
sequential atau “memory” Circuit Control dari setiap sirkuit dan “power” Circuit Control
akhir pekerjaan dari sirkuit.
Ready to start signal Confirmation signal
Fringe
circuit
condition
Stop/start
Auto/manual
Guards
Work-piece
Remote
Etc.
Sequential Circuit
Intuitive
Casecade
Step counter
Logic
Electronic
Etc.
Power
Circuit
DCVs
Actuators
Confirmation
Valve
Etc.
Start signal Command signal
Gambar 13 Tiga Kelompok Besar Dari Sirkuit
Secara sederhana perintah “sequence step” ialah perintah terhadap rangkaian sirkuit tenaga
(power circuit)untuk mengalirkan tekanan secara bertahap.
Ketika semua telah selesai maka sirkuit tenaga (power circuit) akan mengirim konfirmasi
berupa sinyal balik pada sequential circuit bahwa tahapan telah dilakukan. Perintah dan
konfirmasi ini diberikan melalui signal tekanan udara melalui valve disetiap bagian sirkuit.
Pada saat menerima sinyal konfirmasi sequential circuit akan memberikan sinyal “sequence
step”. Pada bagian akhir sequential circuit mengirim sinyal “ready to start” ke blok sirkuit.
Dan jika semua siklus telah selesai maka sinyal akan dikirim kembali ke sequential circuit
untuk me-restart ke siklus berikutnya.
Pada sirkuit yang kecil sequential circuit biasanya cukup dengan satu valve dengan satu blok
sirkuit, sedangkan untuk sirkuit yang lebih besar biasanya setiap sirkuit terdiri atas beberapa
valve.
20
Kunci pengembangan sirkuit ialah dalam set-up dari power circuit , setiap actuator harus
memiliki valve perintah untuk mengalirkan atau menarik kembali tekanan serta valve atau
sensor yang mengidikasi posisi pengaliran atau penarikan tekanan. Kode sinyal perintah atau
konfirmasi ditulis atau dengan penomoran seperti pada gambar 13 berikut.
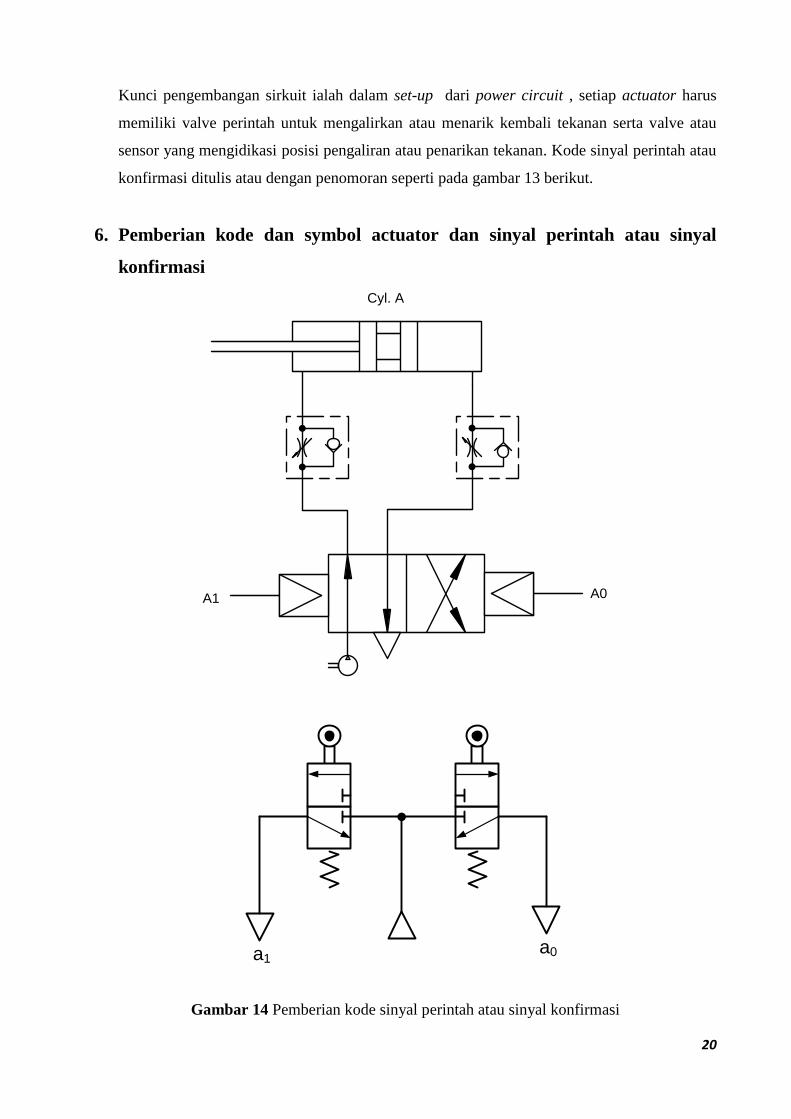
6. Pemberian kode dan symbol actuator dan sinyal perintah atau sinyal
konfirmasi
Cyl. A
A1 A0
a1a0
Gambar 14 Pemberian kode sinyal perintah atau sinyal konfirmasi
21
Kode :
Actuator diberi symbol hurup capital : A,B,C dst. Dengan sinyal perintah input dan huruf lebih
rendah untuk sinyal konfirmasi serta sepasang kode “1” untuk penyaluran tekanan dan “0” untuk
saluran balik. Jadi A1 adalah perintah sinyal ke actuator A, DCV mengalirkan tekanan ke
actuator A dan a memberi sinyal konfirmasi bahwa actuator A telah bertekanan.
Pemakaian anakode 1 dan 0 ialah sepasang nomor kode,dimana :
1 = ON, YES, EXTEND, OPERATIONAL dst.
0 = OFF, NO RETRACT, NON OPERATIONAL dst.
Pada sirkuit dari beberapa mesin biasanya terdapat beberapa actuator dengan extend dan retract
maka step rangkaian perintah disusun dengan urutan :
A1 – B1 – C1 – B0 – C0 – A0
Pernyataan matematis dari perintah gerakan actuator dapat dibaca sebagai berikut :
„Aktuator A dialiri tekanan (extend), diikuti oleh actuator B kemudian actuator C kemudian
actuator A‟.
Jika 2 atau lebih actuator yang bergerak secara bersamaan, maka ditulis dengan :
A1 – B1 - C1 – B0 – C0 – A0.
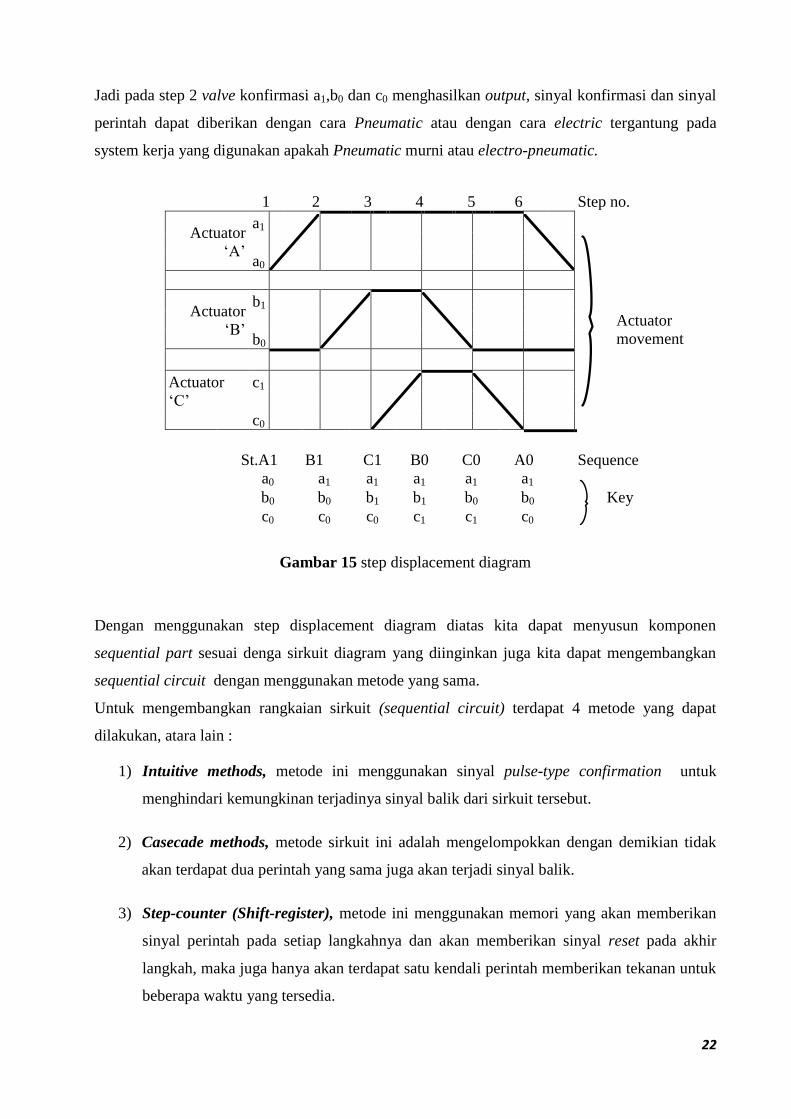
Dari penjelasan ini rangkaian dapat digambarkan pada “step-displacement diagram”. Diagram
ini akan memberikan keseluruhan rangkaian termasuk gerakan-gerakan actuator, sinyal perintah
dan sinyal konfirmasi.
“step-displacement diagram” juga akan menunjukkan “transverse time diagram”,sequence-step
diagram” dan “step-motion diagram”. Untuk contoh ini diperlihatkan pada gambar 14 berikut.
Huruf dan nomor didalam kuci penunjuk status dari output dari valve konfirmasi dan nomor dari
puncak tampilan sequence-step.
22
Jadi pada step 2 valve konfirmasi a1,b0 dan c0 menghasilkan output, sinyal konfirmasi dan sinyal
perintah dapat diberikan dengan cara Pneumatic atau dengan cara electric tergantung pada
system kerja yang digunakan apakah Pneumatic murni atau electro-pneumatic.
1 2 3 4 5 6 Step no.
Actuator
„A‟
a1
a0
Actuator
„B‟
b1
Actuator
movement b0
Actuator
„C‟
c1
c0
St.A1 B1 C1 B0 C0 A0 Sequence
a0 a1 a1 a1 a1 a1
b0 b0 b1 b1 b0 b0 Key
c0 c0 c0 c1 c1 c0
Gambar 15 step displacement diagram
Dengan menggunakan step displacement diagram diatas kita dapat menyusun komponen
sequential part sesuai denga sirkuit diagram yang diinginkan juga kita dapat mengembangkan
sequential circuit dengan menggunakan metode yang sama.
Untuk mengembangkan rangkaian sirkuit (sequential circuit) terdapat 4 metode yang dapat
dilakukan, atara lain :
1) Intuitive methods, metode ini menggunakan sinyal pulse-type confirmation untuk
menghindari kemungkinan terjadinya sinyal balik dari sirkuit tersebut.
2) Casecade methods, metode sirkuit ini adalah mengelompokkan dengan demikian tidak
akan terdapat dua perintah yang sama juga akan terjadi sinyal balik.
3) Step-counter (Shift-register), metode ini menggunakan memori yang akan memberikan
sinyal perintah pada setiap langkahnya dan akan memberikan sinyal reset pada akhir
langkah, maka juga hanya akan terdapat satu kendali perintah memberikan tekanan untuk
beberapa waktu yang tersedia.
23
4) Electro-pneumatic metode ini menggunakan electrical microswitches yang akan
menghasilkan konfirmasi, valve-valve digerakan dengan solenoid dan tentunya dengan
pemakaian relay, electronic sequence, atau program logic controllers (PLC).
Uraian berikut memberikan contoh teknik pengembangan sirkuit diagram dengan metode Step-
counter (Shift-register)
a) Rangkaian
Dalam sebuah rangkaian actuator telah diberi tanda A, kedua B dan seterusnya, selanjutnya
rangkaian dapat ditentukan, lakukan sesuai dengan contoh rengkaian hingga diperoleh sirkuit
secara utuh.
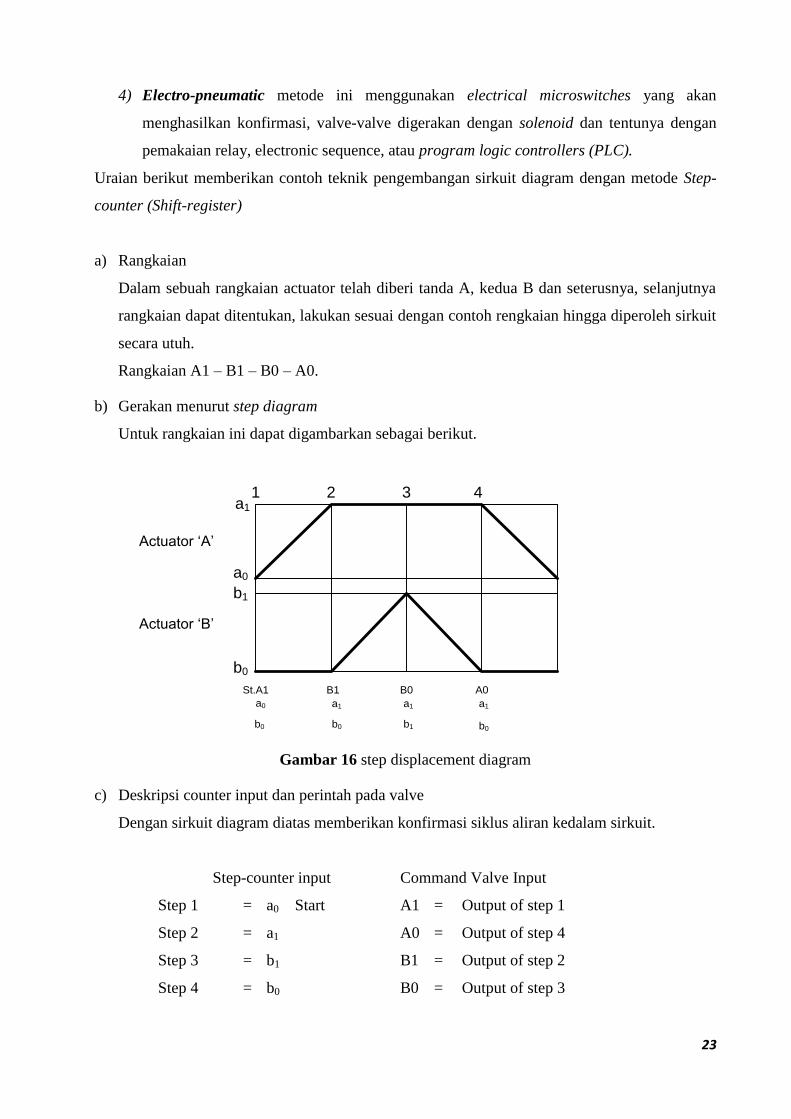
Rangkaian A1 – B1 – B0 – A0.
b) Gerakan menurut step diagram
Untuk rangkaian ini dapat digambarkan sebagai berikut.
a0
a1
Actuator ‘A’
Actuator ‘B’
b1
b0
1 2 3 4
St.A1 B1 B0 A0
a0
b0
a1
b1b0
a1 a1
b0
Gambar 16 step displacement diagram
c) Deskripsi counter input dan perintah pada valve
Dengan sirkuit diagram diatas memberikan konfirmasi siklus aliran kedalam sirkuit.
Step-counter input Command Valve Input
Step 1 = a0 Start A1 = Output of step 1
Step 2 = a1 A0 = Output of step 4
Step 3 = b1 B1 = Output of step 2
Step 4 = b0 B0 = Output of step 3
24
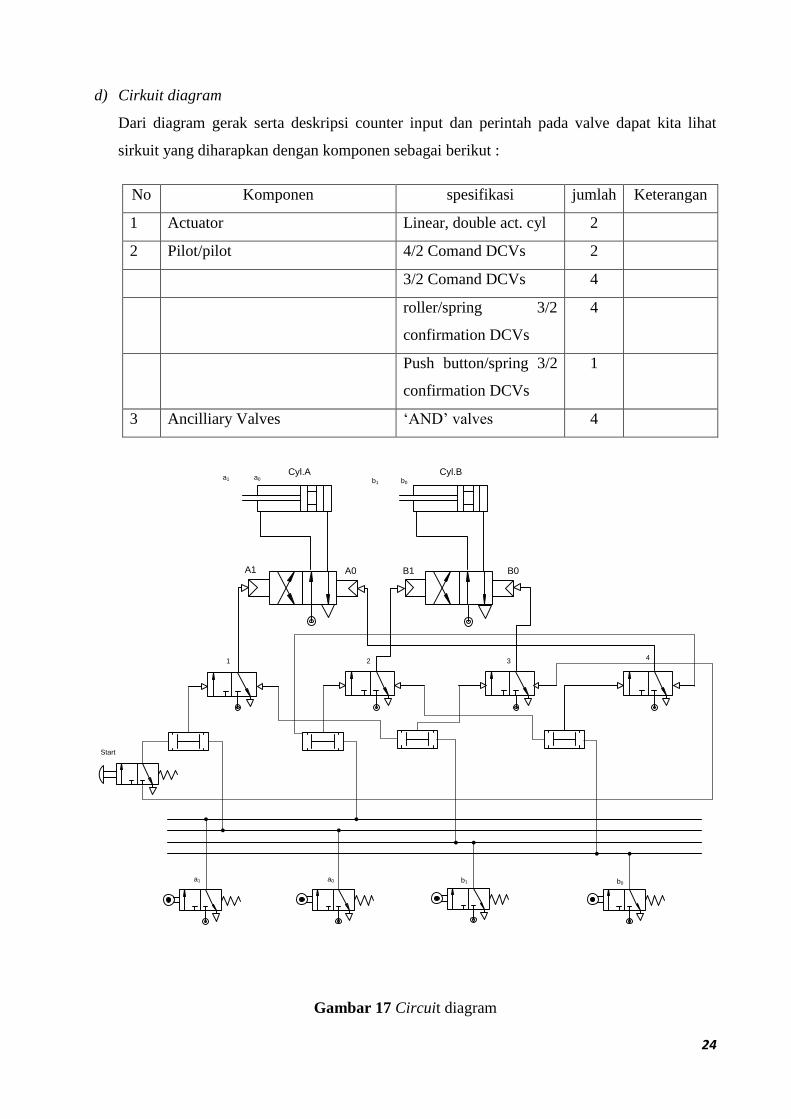
d) Cirkuit diagram
Dari diagram gerak serta deskripsi counter input dan perintah pada valve dapat kita lihat
sirkuit yang diharapkan dengan komponen sebagai berikut :
No Komponen spesifikasi jumlah Keterangan
1 Actuator Linear, double act. cyl 2
2 Pilot/pilot 4/2 Comand DCVs 2
3/2 Comand DCVs 4
roller/spring 3/2
confirmation DCVs
4
Push button/spring 3/2
confirmation DCVs
1
3 Ancilliary Valves „AND‟ valves 4
a1 a0 b1 b0
Start
1 2 34
A1 A0 B1 B0
a1 a0 b1 b0
Cyl.A Cyl.B
Gambar 17 Circuit diagram

25
Pada actuator A dengan posisi balik di a0 akan memberikan sinyal ke AND valve dan ketikan
tombol start ditekan AND valve akan memberikan output ke 3/2 Valve akibatnya output
mengalir ke prosesor A1 dimana preset step unit 2 dan reset step unit 4. Actuator A terhubung
untuk operasi a1, yang terhubung dengan AND valve pada step unit kedua dan telah memiliki
sinyal dari unit pertama. Kedatangan dari a1 sinyal kedua step memory switches yang
menghasilkan output, B1 dan juga mereset step unit 1, dan preset step unit 3, b1 mengawali step
unit 3 dimana reset unit 2, preset 4 dan memberi perintah pada B0. Sinyal konfirmasi
b0mengaktifkan step 4 akibatnya actuator A kembali.
26
BAB III
TENAGA FLUIDA-HYDRAULIC Fluid Power-Hydraulic
A. Pendahuluan
Secara tradisional air dan udara dijadikan media sebagai sumber energy, akan tetapi tentu
saja hanya digunakan untuk memenuhi kebutuhan gerak yang lebih lambat karena secara
kuantitas luas aliran fluida berpangaruh terhadap tekanan relative dari media tersebut, namun
secara alami gerakan tersebut memiliki tekanan.
Walaupun hal ini terjadi ratusan tahun yang lalu namun hal ini merupakan awal pemanfaatan
energy “fluida” hingga dikembangkannya pompa dan compressor yang mampu
menghasilkan tekanan yang lebih besar dan terukur.
Beberapa peristiwa penting juga terjadi dimana penemuan dan pemakaian Teknologi ”Fluid
Power” sebagai sumber energy dikembangkan, antara lain :
1650 Penemuan Hukum Pascal (berusia 27 tahun)
1750 Pengembangan Hukum Bernaulli yang memperhatikan energy fluida
1790 Joseph Bramah mengembangkan mesin press dengan ”Fluid Power” dimana air
sebagai power transmisinya.
1850 ”Fluid Power” dengan energy air dipopulerkan di Inggeris
1868 Dikembangkannya sentral industrial hydraulic dengan energy air di London dan
Manchester
Abad ke 19 terjadi darurat energy listrik
1900 Memperkirakan pemakaian energy listrik lebih menguntungkan
1906 Oli menggeser air sebagai media Hydraulic system
1926 United State mengembangkan hydraulic system, unit pengisi otomatis.
27
Teknologi energy fluida dimulai pada tahun 1650 hasil penemuan yang menentukan bahwa
“pressure in fluid at rest is transmited equal in all direction” yang kemudian dikenal dengan
hukum Pascal, dimana “Tekanan yang diberikan zat cair dalam ruang tertutup diteruskan ke
segala arah dengan sema besar”, yakni :
P = . G. h
dimana :
P = tekanan hydostatic (Pa)
atau beda tekanan pada 2 titik dalam sekat yang berisi zat cair karena beda
berat antara keduannya
= mass jenis zat cair (kg/m3)
G = percepatan grafitasi (m/sec2)
h = ketinggianz cair diatas titik pengukuran (m)
atau beda tinggi antara 2 titik pada kolom yag berisi zat cair
Teknologi ”Fluid Power” banyak diterapkan dalam berbagai peswat kerja yang memerlukan
tenaga besar seperti mesin pres, cranes,winches, extruding machines dan lain-lain, namun
tidak banyak dikembangkan pada power tool tentu saja disaat keterbatasan energy listrik,
”Fluid Power” ini dapat dipertimbangkan pemakaiannya.
Berbagai keuntungan system kerja elektrik dan mekanik sebagai power transmisi, maka
diakhir abad ke 19 ini system kerja hydraulic pengembangan penerapannya menjadi lebih
luas.
Ternyata ”Fluid Power” memiliki berbagai flexibilitas pada berbagai system transmisi
kendati terdapat beberapa kekurangan dan dewasa ini aplikasi ”Fluid Power” digunakan
secara luas pada berbagai industry dan pada lingkup yang tidak terbatas, meliputi :
Desain sederhana
Pengoperasian yang praktis dengan pengontrol kecepatan (speed control), pengontrol
tekanan (pressure control), pengontrol arah(directional control), dan lain-lain.
28
Cocok digunakan dalam system kerja otomatis
Bervariasi output daya
Systemnya yang Tahan lama, dimana :
- Pelumasan sendiri (self lubrication)
- Memiliki pelindung terhadap kelebihan beban (protection overload condition)
- Getaran yang relative kecil (minimal Vibration)
- Variasi Percepatan dan perlambatan yang tidak beraturan
Moderenisai pengembangan teknologi dari kelengkapan Mudah dan sistematik
Operational ekonomis dan efisien.
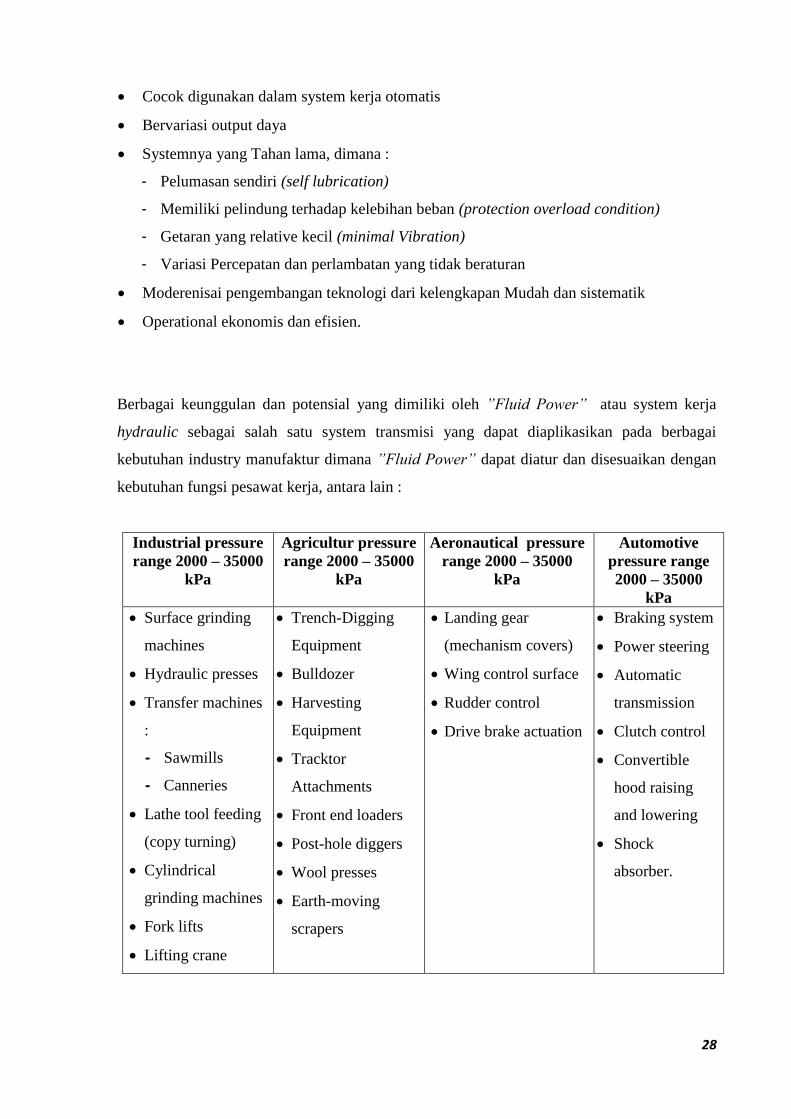
Berbagai keunggulan dan potensial yang dimiliki oleh ”Fluid Power” atau system kerja
hydraulic sebagai salah satu system transmisi yang dapat diaplikasikan pada berbagai
kebutuhan industry manufaktur dimana ”Fluid Power” dapat diatur dan disesuaikan dengan
kebutuhan fungsi pesawat kerja, antara lain :
Industrial pressure
range 2000 – 35000
kPa
Agricultur pressure
range 2000 – 35000
kPa
Aeronautical pressure
range 2000 – 35000
kPa
Automotive
pressure range
2000 – 35000
kPa
Surface grinding
machines
Hydraulic presses
Transfer machines
:
- Sawmills
- Canneries
Lathe tool feeding
(copy turning)
Cylindrical
grinding machines
Fork lifts
Lifting crane
Trench-Digging
Equipment
Bulldozer
Harvesting
Equipment
Tracktor
Attachments
Front end loaders
Post-hole diggers
Wool presses
Earth-moving
scrapers
Landing gear
(mechanism covers)
Wing control surface
Rudder control
Drive brake actuation
Braking system
Power steering
Automatic
transmission
Clutch control
Convertible
hood raising
and lowering
Shock
absorber.
29
B. Beberapa sifat fluida
“Fluida yakni cair atau gas dapat mengalir kesegala arah” ini adalah sifat yang mendasar dari
fluida, namun beberapa sifat lainnya antara lain :
- Luwes (Flexibel) tidak meregang (khususnya fluida cair)
- Fluida cair bersifat incompressible pada tekanan 7000 kPa atau 7 mPa namun
terkompresi sebesar 0,5% setiap extra7000 kPa.
- Dapat mudah berubah bentuk
- Dapat dibagi kedalam beberapa part dari pekerjaan yang berbeda lokasi
- Dapat bergerak cepat atau lambat dalam satu tempat
- Dapat mentransmisikan daya keseluruh arah dengan permukaan yang selalu memiliki
pelumas.
C. Keunggulan hydraulic power
Hydraulic power dapat diterapkan hamper disemua sector industry hingga industry rumahan,
idustri pemesinan, kendaraan tractor, pesawat terbang, industry pertahanan dan militer,
kelautan dan perikanan.
Hydraulic power memiliki derajat akurasi yang memadai, Luwes (Flexibel), pengedalian
dengan system transmisi yang sederhana dan mampu mentransmisikan daya yang cukup
besar.
D. Beberapa kelemahan dari Hydraulic Power System
Hydraulic Power System memerlukan struktur organisasi yang
Hydraulic Power System memerlukan tempat dengan pipa atau selang yang lebih kuat.
Hydraulic Power System memerlukan perhatian khusus dalam menghindari kebocoran dan
sangat riskan terutama pada tekanan tinggi
Gerakkan fluida menimbulkan gesekan terhadap permukaan saluran yang dapat mereduksi
energy sehingga merugikan efisiensi
Harus terhindar dari benda-benda asing seperti bahan kimia yang dapat menimbulkan lumpur
dan korosi serta oksidasi, masuknya udara (oxygen) yang tercampur pada oli didalam fluida
dapat mengakibatkan oxidasi.
30
E. Unit dasar dan Formulasi
1) Head pressure
Head pressure ialah jarak antara permukaan fluida dalam satuan kilopascal (kPa).
Setiap meter air equivalent dengan 9,8 kPa.
Setiap meter oli equivalent dengan 8,4 kPa.
2) Peristilahan dasar
Peristilahan dasar yang digunakan pada kategori Hydraulic Power System antara lain :
Gaya (Force), tekanan (pressure), Luas penampang (Area), dan elemen kerja (working
element).
3) Gaya (Force)
Gaya (Force) merupakan unsur penting dalam system kerja hydraulic dan merupakan
energy dan sumber gerakkan yang akan digunakan sebagai penggerak mesin perkakas
dan lain-lain. Ketersedian besaran Gaya (Force) ini tentu saja disesuaikan dengan objek
inersia. Gaya (Force) ditentukan dalam satuan Newton atau kilonewton.
4) Tekanan (pressure)
Tekanan (pressure) ialah Gaya (Force) yang bekerja pada setiap luas permukaan dimana
adalah Newton per square metre (N/m2).
Pascal (Pa), kilopascal (kPa)
1000 N/m2 = 1 kPa.
5) Luas penampang (Area)
Luas penampang (Area),dalam hydraulic system digunakan sebagai variable dalam
perhitungan tekanan dimana Luas penampang (Area) ditentukan dalam square metre
(m2).
Hubungan antara gaya dengan tekanan telah didemmontrasikan oleh atmosphere bumi
dimana udara menyelimuti seluruh permukaan bumi yang beratnya tak terhingga.
Walaupun gaya telah diupayakan dengan berat lajur udara dari satu meter persegi pada
garis tengahnya adalah 101,325 kN pada permukaan laut, dan ternyata tekanan
atmospherenya adalah 101,325 kPa.
31
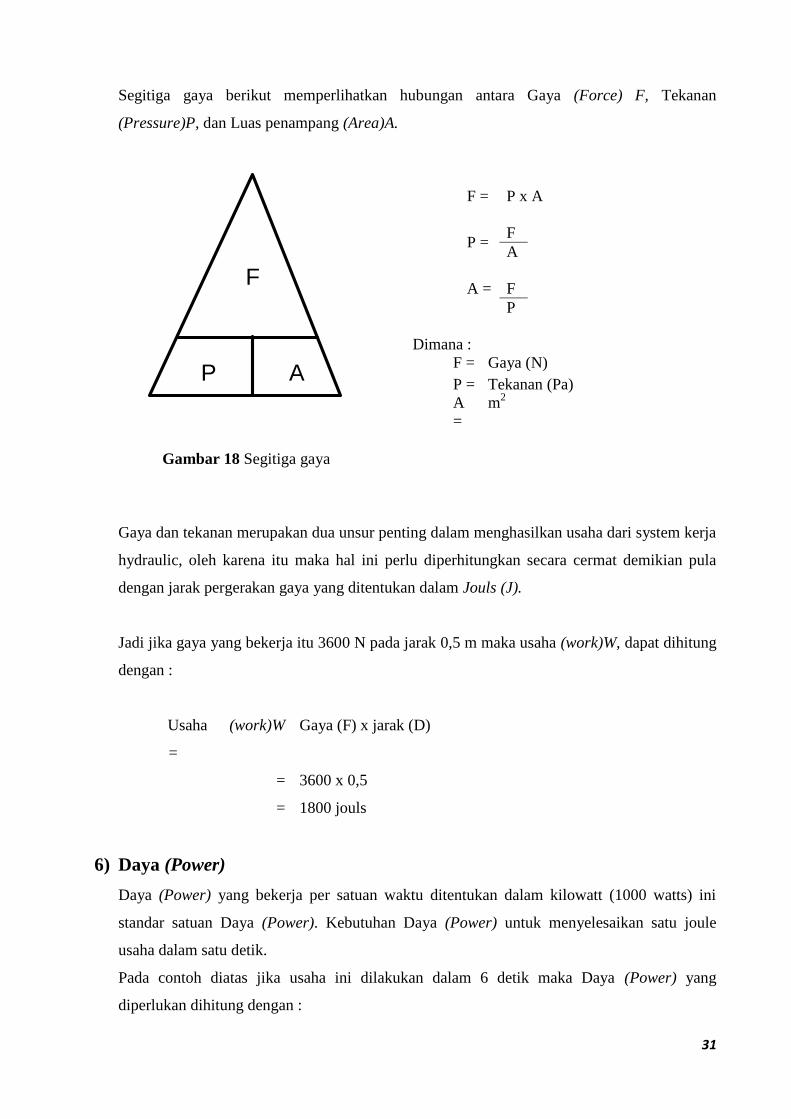
Segitiga gaya berikut memperlihatkan hubungan antara Gaya (Force) F, Tekanan
(Pressure)P, dan Luas penampang (Area)A.
F
P A
Gambar 18 Segitiga gaya
F = P x A
P = F
A
A = F
P
Dimana :
F = Gaya (N)
P = Tekanan (Pa)
A
=
m2
Gaya dan tekanan merupakan dua unsur penting dalam menghasilkan usaha dari system kerja
hydraulic, oleh karena itu maka hal ini perlu diperhitungkan secara cermat demikian pula
dengan jarak pergerakan gaya yang ditentukan dalam Jouls (J).
Jadi jika gaya yang bekerja itu 3600 N pada jarak 0,5 m maka usaha (work)W, dapat dihitung
dengan :
Usaha (work)W
=
Gaya (F) x jarak (D)
= 3600 x 0,5
= 1800 jouls
6) Daya (Power)
Daya (Power) yang bekerja per satuan waktu ditentukan dalam kilowatt (1000 watts) ini
standar satuan Daya (Power). Kebutuhan Daya (Power) untuk menyelesaikan satu joule
usaha dalam satu detik.
Pada contoh diatas jika usaha ini dilakukan dalam 6 detik maka Daya (Power) yang
diperlukan dihitung dengan :
32
Daya (Power) = Gaya (F) x Jarak
time
= 3600 x 0,5
6
= 300 W atau 0,3 kW
Static
liquid
under
pressure
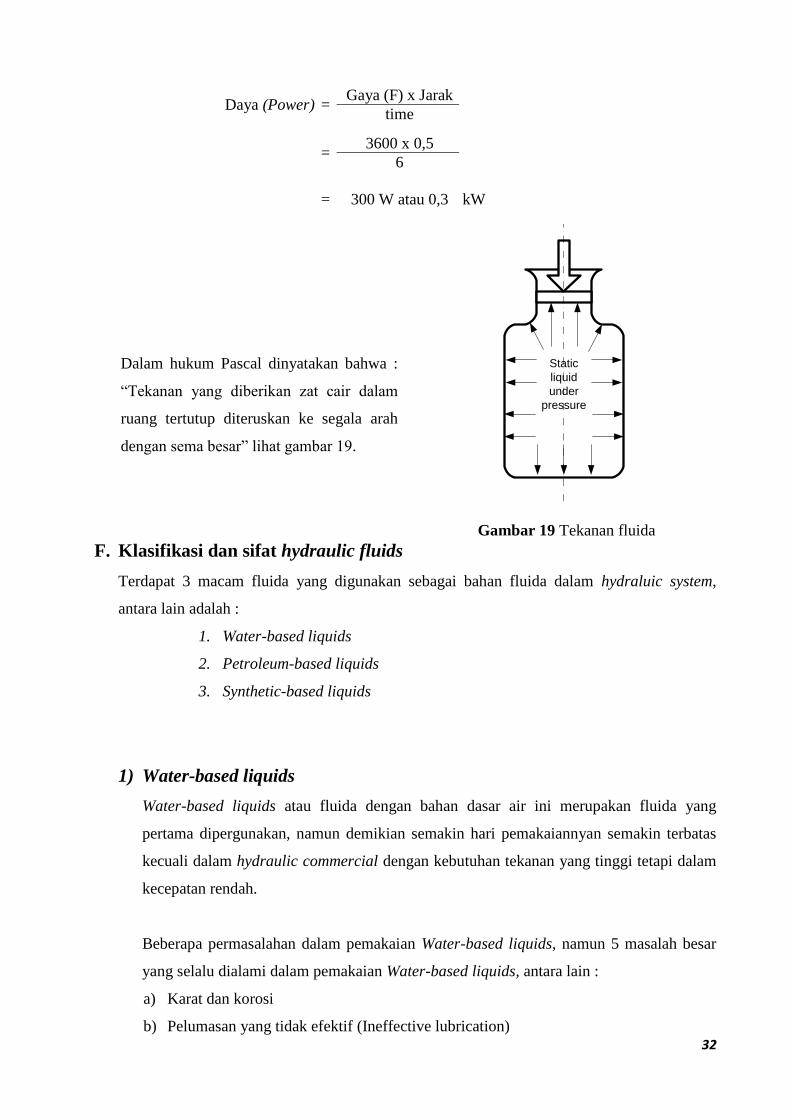
Gambar 19 Tekanan fluida
Dalam hukum Pascal dinyatakan bahwa :
“Tekanan yang diberikan zat cair dalam
ruang tertutup diteruskan ke segala arah
dengan sema besar” lihat gambar 19.
F. Klasifikasi dan sifat hydraulic fluids
Terdapat 3 macam fluida yang digunakan sebagai bahan fluida dalam hydraluic system,
antara lain adalah :
1. Water-based liquids
2. Petroleum-based liquids
3. Synthetic-based liquids
1) Water-based liquids
Water-based liquids atau fluida dengan bahan dasar air ini merupakan fluida yang
pertama dipergunakan, namun demikian semakin hari pemakaiannyan semakin terbatas
kecuali dalam hydraulic commercial dengan kebutuhan tekanan yang tinggi tetapi dalam
kecepatan rendah.
Beberapa permasalahan dalam pemakaian Water-based liquids, namun 5 masalah besar
yang selalu dialami dalam pemakaian Water-based liquids, antara lain :
a) Karat dan korosi
b) Pelumasan yang tidak efektif (Ineffective lubrication)
33
c) Temperatur yang berubah-ubah
d) Mudah kemasukan zat lain yang mengakibatkan abrasi (abrasive action)
e) Memiliki titik didih yang relative rendah.
Hal-hal sebagaimana tersebut diatas ini sangat merugikan efisiensi operasional dan
menuntut perawatan yang terus-menerus, kendati air merupakan medium yang ideal
ketahanannya terhadap api serta harga yang murah, namun air pun dapat digunakan
dengan mencampurnya dengan bahan-bahan lain seperti oli sehingga dapat digunakan
untuk fungsi lain dengan kuantitas yang lebih besar atau pekerjaan-pekerjaan dengan
temperature tinggi dan berpeluang menimbulkan kebakaran.
2) Petroleum-based liquids
Satu dan yang pertama digunakan sebagai bahan fluida dalam hydraluic system ialah
Petroleum-based liquids, teknologi automotive telah menggunakannya dalam system rem
(brake fluid) walaupun penggunaanya terbatas karena komponen rem yang terbuat dari
karet tidak tahan terhadap Petroleum-based liquids, kendati dengan kemajuan teknologi
bahan-bahan ini dibuat dari bahan sintetis yakni Synthetic-rubber seals. Karet jenis inilah
yang memungkinkan penggunaan Petroleum-based liquids kususnya pada industry
modern.
Petroleum dapat diperhalus yang akan menghasilkan oli dengan berbagai viscositas serta
penambahan bahan ”additif” yang menghasilkan berbagai keunggulan karfakteristik
sehingga menjadikan mekanisme hydraluic system menjadi tahan lama dan tentunya
peningkatan efisiensi.
3) Synthetic-based liquids
Petroleum-based Oil memiliki berbagai sifat yang sesuai sebagai bahan fluida dalam
hydraluic system walaupun dalam beberapa hal memiliki kelemahan yakni mudah
terbakar serta dapat menimbulkan ledakan yang berbahaya terutama pada tekanan dan
temperature tinggi, namun dalam perkembangannya tercipta non-flammable synthetic
liquids yang lebih baik sebagai bahan fluida dalam hydraluic system, sehingga dengan
demikian bahaya ledakan dan pembakaran pada tekanan dan temperature tinggi dapat
dihindari, dimana Synthetic-based liquids dibuat dari bahan kimia yang tahan terhadap
berbagai sifat buruk dari Petroleum-based Oil, seperti phosphate esters, chlorinated
biphenils, atau campuran lainnya sehingga cocok digunakan sebagai bahan fluida dalam
hydraluic system.
34
G. Sifat-sifat bahan fluida
Sifat-sifat bahan fluida seperti incompressible dan fluidity yang secara kuantitas diperlukan
sebagai bahan fluida dalam hydraluic system namun beberapa sifat yang lain juga perlu
diperhatikan, misalnya Viscositas, daya lumas, kesetabilan kimia, kebebasan terhadap asam,
ketahanan terhadap temperature tinggi, serta tidak beracun dan lain-lain.
1) Viscositas
Salah satu dari sifat tersebut diatas adalah Viscositas dimana merupakan salah satu sifat
penting yang berhubungan dengan fungsi kerja hydraluic system, dimana Viscositas ini
secara sederhana dapat didefinisikan sebagai ukuran kemampuan mengalir suatu fluida
pada perubahan temperature. Sebagai contoh perbandingan dua jenis cairan yakni bensin
cepat mengalir sedangkan tar lambat mengalir, dalam hal ini tar meiliki Viscositas tinggi.
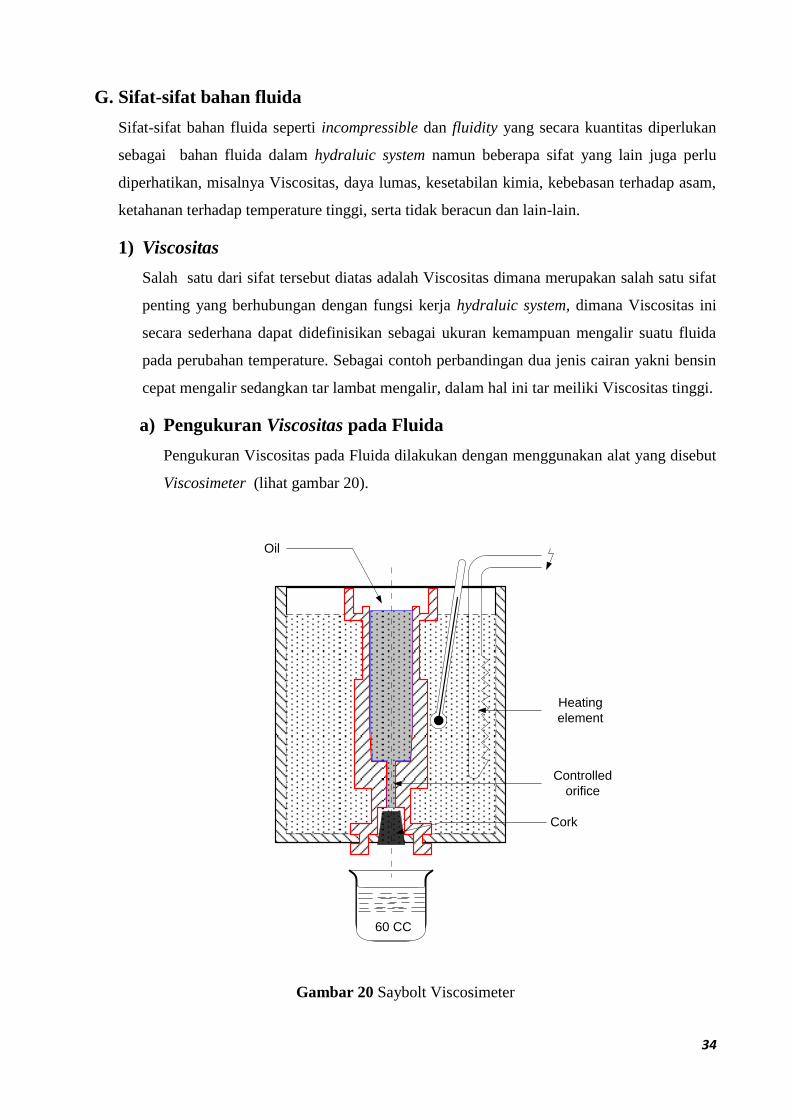
a) Pengukuran Viscositas pada Fluida
Pengukuran Viscositas pada Fluida dilakukan dengan menggunakan alat yang disebut
Viscosimeter (lihat gambar 20).
A
60 CC
Heating
element
Controlled
orifice
Cork
Oil
Gambar 20 Saybolt Viscosimeter
35
Proses pengukuran dengan menggunakan Saybolt Viscosimeter dilakukan dalam
hitungan detik untuk hasil ukur fluida 60 Cm3 yang dialirkan melalui orifice yang
memiliki ukuran standar panjang dan diameternya serta spesifikasi temperature yang
telah ditentukan, contoh ; viscositas dari cairan 80 detik, Saybolt Universal (80 SSU)
pada 550C.
b) Viscositas Index
Salah satu sifat yang ideal untuk hydraulic liquid harus memiliki ketahanan sama
dengan viscositas dibawah semua temperature dan tekanan kerja. Beberapa cairan,
khususnya petroleum-based oils tidak boleh memiliki karakteristik ini. Jika
temperatur meningkat, oli mencair, temperature menurun, oli mengental dan
viscositas meingkat.
c) Penambahan beberapa jenis polymers dapat memperbaiki Viscositas Index dari
hydraulic oil, sehingga dengan demikian hydraulic oil memiliki ketahanan terhadap
perubahan temperature serta selalu meninggalkan lapisan film pada dinding
komponen dan melumasi bagian komponen yang bergesek.
2) Daya lumas(Lubricating power)
Hydraulic liquid yang berfungsi sebagai elemen transmisi dimana selain bekerja secara
hidrolis juga akan bergerak secara mekanis antara komponen dari bagian tersebut,
pergerakan inilah yang memungkinkan terjadi gesekan yang bukan saja akan
mengakibatkan peningkatan temperature kerja yang merugikan efisiensi, tetapi juga kan
mengakibatkan kerusakan dari keausan komponen tersebut. Oleh karena itu Hydraulic
liquid harus memiliki kemampuan untuk membentuk lapisan fim minyak terutama
dibagian komponen yang bergesek. Sifat ini dapat diperoleh pada Hydraulic liquid yang
dikembangkan dengan penambahan unsur kimia (Chemical agents) sebagai bahan
additive.
3) Ketahanan kimia (Chemical agents)
Ketahanan kimia (Chemical agents) dapat didefinisikan bahwa liquid harus memiliki
ketahanan terhadap oxidase dan kerusakan dalam periode yang panjang.
36
Salah satu penyebab utama kerusakan oleh Hydraulic liquid adalah peningkatan
temperature yang berlebihan (overheat). Hal ini penting untuk kita perhatikan dan tidak
hanya memperhatikan indicator pada reservoir karena indicator ini belum tentu
menggambarkan temperature seluruh operasi.
Pemisahan hot spot seperti tempat bearing, roda gigi atau pada bagian dimana fluida
dipaksa masuk melalui orifice yang sangat kecil karena penyempitan saluran oleh adanya
endapan. Material seperti seng, lead, brass dan copper secara kimiawi sangat reaktif
terhadap liquids.
4) Bebas asam (freedom from acidity)
Derajat keasaman dari hydraulic fluid pada kondisi baru cukup memadai namun
kondisinya tidak selalu tetap terlebih pada kondisi kerja. Setelah digunakan hydraulic
fluid tingkat korosipnya cenderung meningkat dan mulai terjadi kerusakan, oleh karena
itu perlu pemeriksaan secara periodic.
5) Ketahan terhadap peningkatan temperatur
Ketahan terhadap peningkatan temperature merupakan salah satu sifat yang harus
dimiliki oleh hydraulic fluid yaitu peningkatan temperature akan menimbulkan
terbakarnya hydraulic fluid yang memeiliki flash point rendah dimana panas akan
menimbulkan uap dan memicu terbakarnya hydraulic fluid tersebut. Oleh karena itu
hydraulic fluid yang diharapkan adalah yang memiliki flash point tinggi karena tahan
terhadap pembakaran dan memiliki derajat penguapan yang rendah pada temperature
normal.
6) Minim Kandungan racun (Minimum Toxicity)
Idealnya hydraulic fluid tidak memiliki kandungan racun, akan tetapi paling tidak
kandungan racunnya berada pada batas aman karena terbakarnya hydraulic fluid juga
merupakan pemicu terbentuknya racun, tentu saja untuk mengantisipasi hal tersebut
maka pemilihan hydraulic fluid harus memperhatikan kualitas dari fluida yang terdapat
pada label serta penanganannya secara hati-hati.
37
H. Pompa hydraulic
Hal yang paling utama dari fungsi pompa hydraulic ialah menekan hydraulic fluid serta
membentuk aliran fluida.
Pembentukan tekanan tentu berlawanan dengan aliran, selanjutnya jika tahan terhadap beban
yang diberikan oleh actuator maka tekanan hanya cukup untuk menahan beban.
Pada saat pompa mengalirkan fluida kecepatannya juga dipengaruhi oleh part dari system itu
sendiri dimana pipa akan membentuk tekanan.
1) Beberapa type pompa yang digunakan pada system kerja hydraulic
Secara umum pompa hydraulic ini dibedakan dalam 2 type, yakni :
- Type Positif
Type Positif yakni type pompa hydraulic dimana saluran masuk (inlet)-nya tertutup
dari saluran keluar (outlet) nya. Untuk memisahkan saluran-saluran ini, pompa
dilengkapi dengan valve.
- Type Non-Positif
Type Non-Positif yakni type pompa hydraulic dimana secara hydraulis saluran masuk
(inlet)-nya dan saluran keluar (outlet) nya saling berhubungan.
Pompa hydraulic Type Positif antara lain,
- Piston type: Radial, axial, in-line, hand-type (hollow piston)
- Gear type : Internal dan external
- Vane type :Unbalanced, balanced
- Gerotor type.
Pompa hydraulic Type Non-Positif antara lain,
- Centrifugal type : impellor, low pressure high-volume flow. Volume aliran
tergantung pada kecepatan dan perlawanan pada sisi discharge.
- Axial flow type-Jet boat.
38
2) Perpindahan fluida
Fluida yang dipindahkan jumlahnya tergantung pada pengiriman fluida melalui inlet ke
outlet dalam satu putaran atau satu siklus.
Untuk pompa type rotary Volume perpindahan fluida ditentukan dalam liter per putaran
sedangkan untuk pompa dengan reciprocating type Volume perpindahanny ditentukan
dalamliter per siklus.
Jika pompa memiliki lebih dari satu ruangan pemompa maka pompa pemindah itu sama
dengan satu ruangan pompa kali jumlah ruangan pemompa. Misalnya sebuah pompa rotary
memiliki 8 ruangan pemompa dan masing-masing ruangan memindahkan fluida sebanyak
2,5 ml (milliliteres) maka total fluida yang dipindahkan adalah :
2,5 x 8 = 20 ml atau 0,02 l per putaran
3) Contoh dari beberapa type pompa
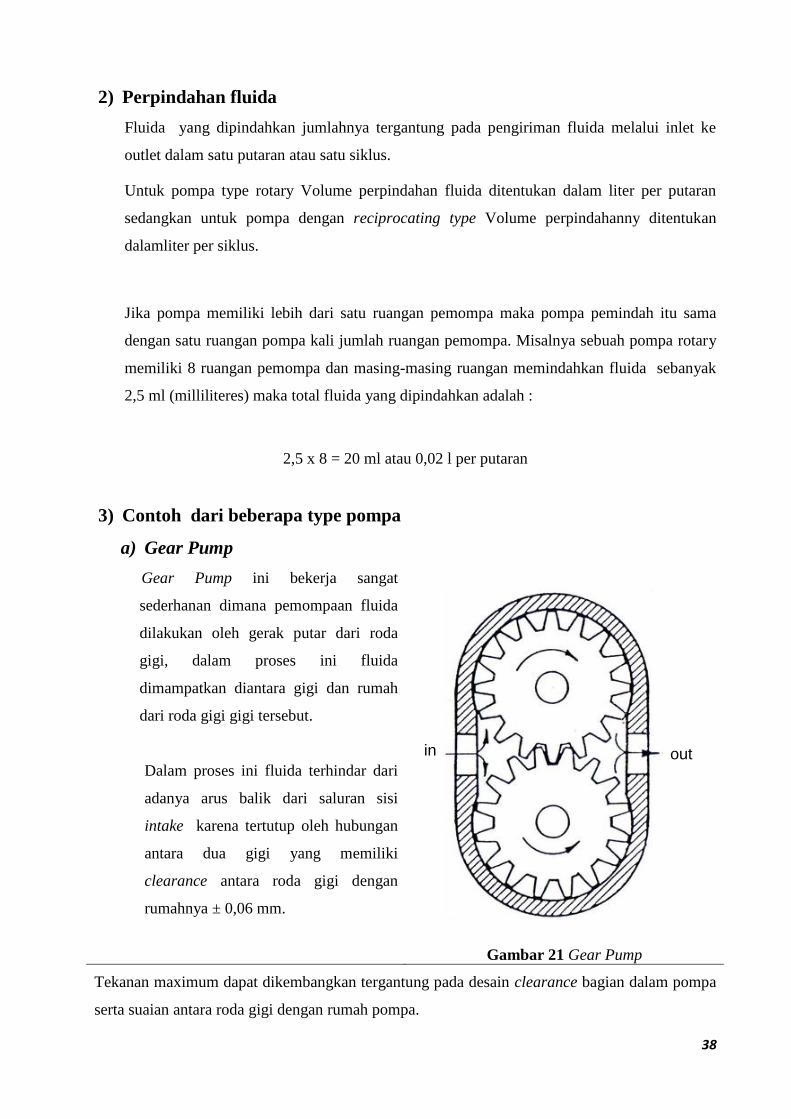
a) Gear Pump
Gear Pump ini bekerja sangat
sederhanan dimana pemompaan fluida
dilakukan oleh gerak putar dari roda
gigi, dalam proses ini fluida
dimampatkan diantara gigi dan rumah
dari roda gigi gigi tersebut.
Dalam proses ini fluida terhindar dari
adanya arus balik dari saluran sisi
intake karena tertutup oleh hubungan
antara dua gigi yang memiliki
clearance antara roda gigi dengan
rumahnya ± 0,06 mm.
in out
Gambar 21 Gear Pump
Tekanan maximum dapat dikembangkan tergantung pada desain clearance bagian dalam pompa
serta suaian antara roda gigi dengan rumah pompa.
39
Pompa dengan type sebagaimana diperlihatkan pada gambar 21 dapat menghasilkan
tekanan hingga 30 MPa namun pada kondisi normal rata-rata mencapai 15 MPa. Jika
Gear Pump berputar dalam kecepatan konstan akan memiliki kemampuan pengisian
volume oli secara konstan pula. Kapasitas pompa dapat menghasilkan diatas 10 liter per
detik.
Pemakaian spur gears seperti pada gambar 21 berpeluang memiliki getaran yang lebih
besar dibandingkan dengan pemakaian helical gears atau double helical gears.
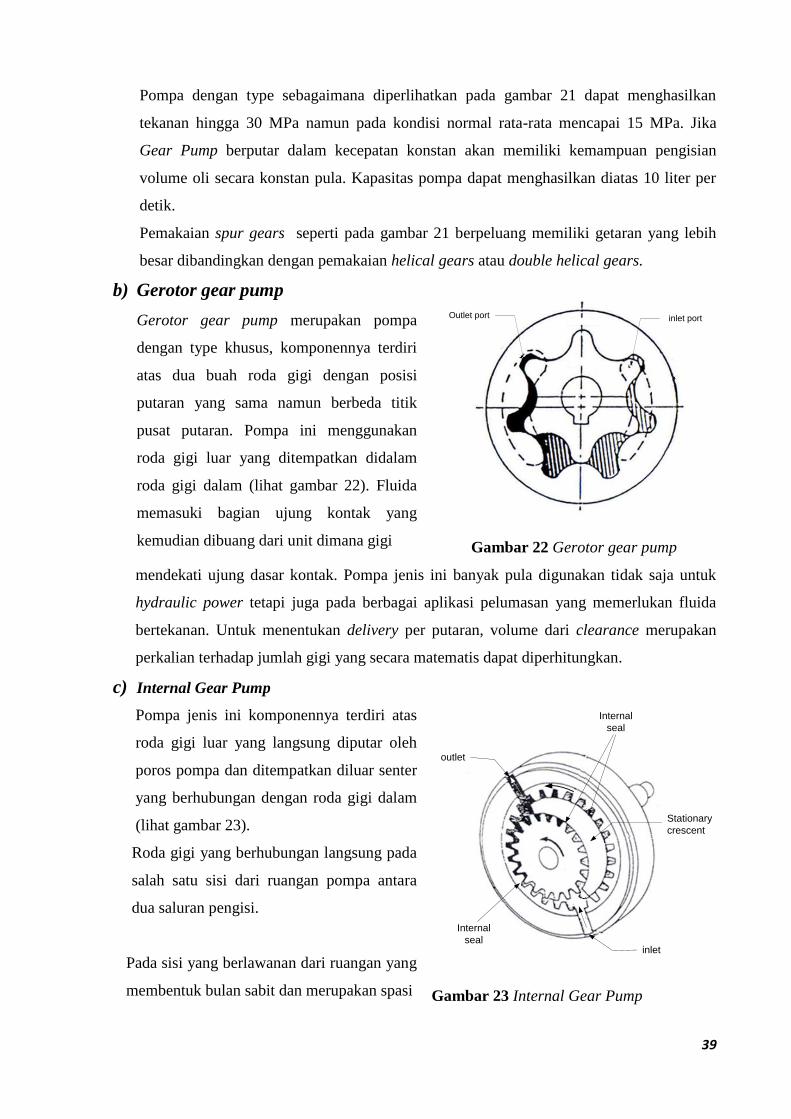
b) Gerotor gear pump
Gerotor gear pump merupakan pompa
dengan type khusus, komponennya terdiri
atas dua buah roda gigi dengan posisi
putaran yang sama namun berbeda titik
pusat putaran. Pompa ini menggunakan
roda gigi luar yang ditempatkan didalam
roda gigi dalam (lihat gambar 22). Fluida
memasuki bagian ujung kontak yang
kemudian dibuang dari unit dimana gigi
inlet portOutlet port
Gambar 22 Gerotor gear pump
mendekati ujung dasar kontak. Pompa jenis ini banyak pula digunakan tidak saja untuk
hydraulic power tetapi juga pada berbagai aplikasi pelumasan yang memerlukan fluida
bertekanan. Untuk menentukan delivery per putaran, volume dari clearance merupakan
perkalian terhadap jumlah gigi yang secara matematis dapat diperhitungkan.
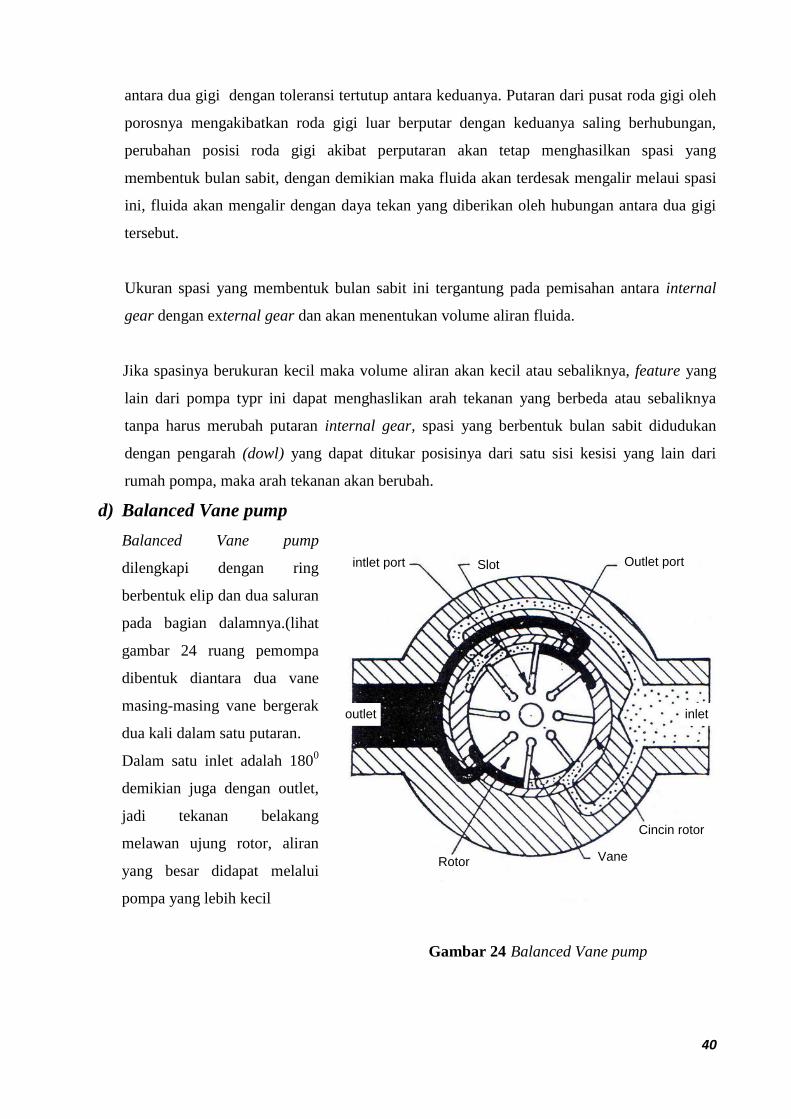
c) Internal Gear Pump
Pompa jenis ini komponennya terdiri atas
roda gigi luar yang langsung diputar oleh
poros pompa dan ditempatkan diluar senter
yang berhubungan dengan roda gigi dalam
(lihat gambar 23).
Roda gigi yang berhubungan langsung pada
salah satu sisi dari ruangan pompa antara
dua saluran pengisi.
Pada sisi yang berlawanan dari ruangan yang
membentuk bulan sabit dan merupakan spasi
Internal
seal
Internal
seal
Stationary
crescent
inlet
outlet
Gambar 23 Internal Gear Pump
40
antara dua gigi dengan toleransi tertutup antara keduanya. Putaran dari pusat roda gigi oleh
porosnya mengakibatkan roda gigi luar berputar dengan keduanya saling berhubungan,
perubahan posisi roda gigi akibat perputaran akan tetap menghasilkan spasi yang
membentuk bulan sabit, dengan demikian maka fluida akan terdesak mengalir melaui spasi
ini, fluida akan mengalir dengan daya tekan yang diberikan oleh hubungan antara dua gigi
tersebut.
Ukuran spasi yang membentuk bulan sabit ini tergantung pada pemisahan antara internal
gear dengan external gear dan akan menentukan volume aliran fluida.
Jika spasinya berukuran kecil maka volume aliran akan kecil atau sebaliknya, feature yang
lain dari pompa typr ini dapat menghaslikan arah tekanan yang berbeda atau sebaliknya
tanpa harus merubah putaran internal gear, spasi yang berbentuk bulan sabit didudukan
dengan pengarah (dowl) yang dapat ditukar posisinya dari satu sisi kesisi yang lain dari
rumah pompa, maka arah tekanan akan berubah.
d) Balanced Vane pump
Balanced Vane pump
dilengkapi dengan ring
berbentuk elip dan dua saluran
pada bagian dalamnya.(lihat
gambar 24 ruang pemompa
dibentuk diantara dua vane
masing-masing vane bergerak
dua kali dalam satu putaran.
Dalam satu inlet adalah 1800
demikian juga dengan outlet,
jadi tekanan belakang
melawan ujung rotor, aliran
yang besar didapat melalui
pompa yang lebih kecil
Cincin rotor
Vane Rotor
outlet inlet
Outlet portintlet port Slot
Gambar 24 Balanced Vane pump
41
e) Vane pumps
Pompa dari type Vane pump ini bagian rotonya memiliki slot digerakan oleh putaran poros
diatara suaian tertutup dan dari sisi yang berbentuk elip atau cincin yang berbentuk
lingkaran. Vane di-harden dan di poles sehingga sliding dibagian dalam maupun bagian luar
dari rotor slot dan mengikuti kontur cincin karena pengaruh gaya sentrifugal (lihat gambar
25). Ruangan pemompa dibentuk diantara urutan sudu (vane) membawa oli dari inlet ke
outlet.
Bagian yang vacuum membentuk inlet sebagai spasi antara pembukaan vane. Terjadi
pemampatan oli pada ruang pemompa karena terjadi penyempitan.
Gambar 25 Vane pump
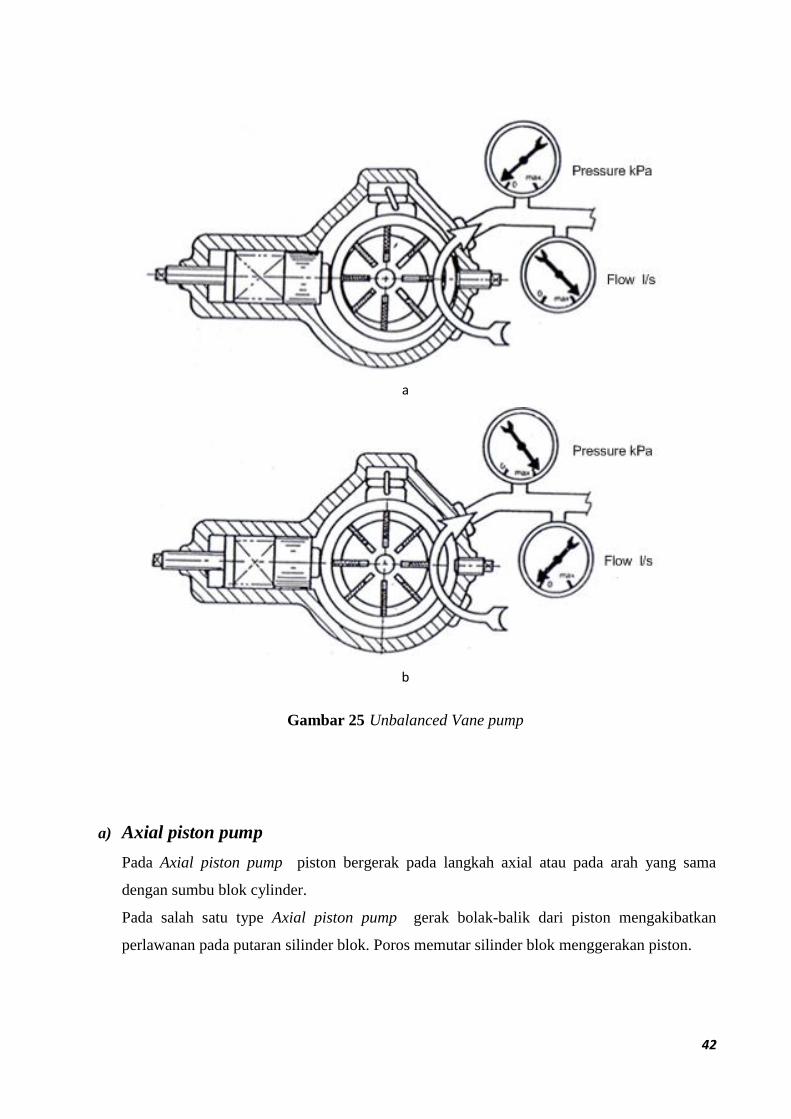
f) Unbalanced Vane pump
Pada variable volume (pengganti tekanan) Unbalanced Vane pump seperti diperlihatkan
pada gambar 25 dimana pompa fluida yang menggunakan prinsip kerja involved. Gambar 25
a memperlihatkan kondisi aliran maximum dan ketika terjadi pembatasan aliran pada outlet
minimum di sisi pompa. Pembatasan ini dilakukan dengan silinder beban yang terdapat
dibagian dalam pompa oleh kekuatan pegas hingga pada posisi sebagaimana diperlihatkan
pada gambar 25 b, tekanan maximum dikendalikan tetapi laju aliran menurun cukup meleleh
pada silinder kerja.
42
a
b
Gambar 25 Unbalanced Vane pump
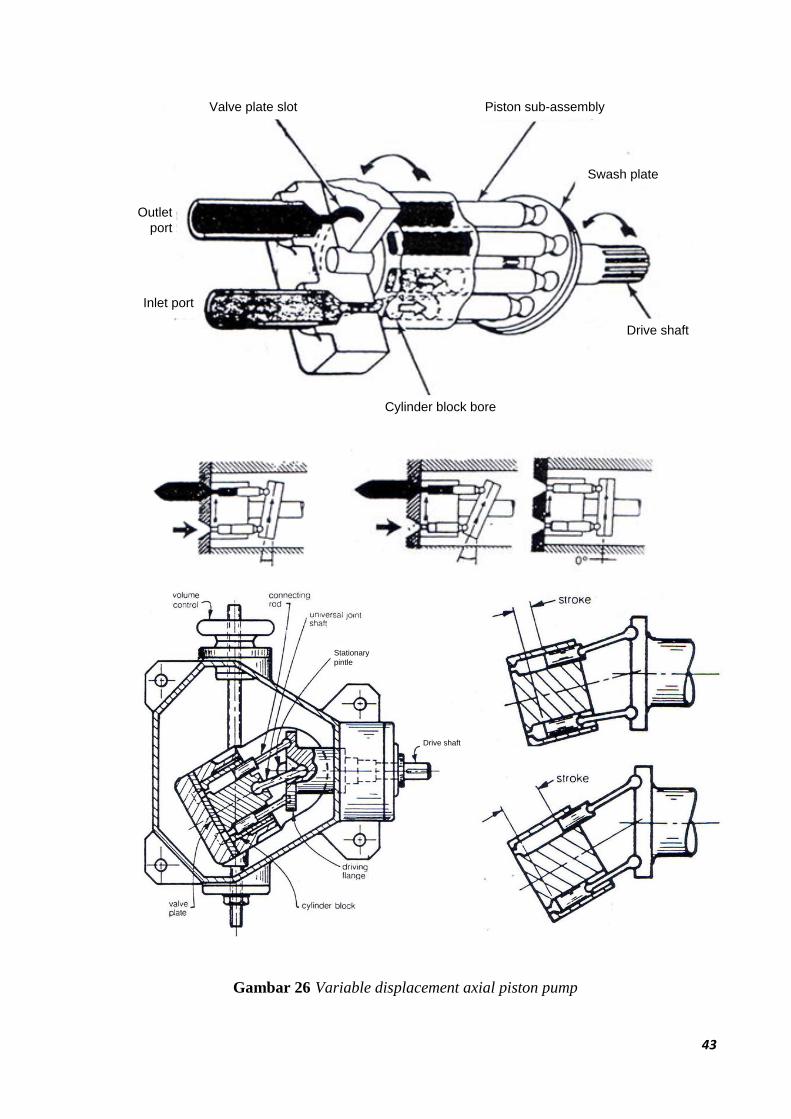
a) Axial piston pump
Pada Axial piston pump piston bergerak pada langkah axial atau pada arah yang sama
dengan sumbu blok cylinder.
Pada salah satu type Axial piston pump gerak bolak-balik dari piston mengakibatkan
perlawanan pada putaran silinder blok. Poros memutar silinder blok menggerakan piston.
43
Piston sub-assemblyValve plate slot
Swash plate
Drive shaft
Cylinder block bore
Inlet port
Outlet
port
Drive shaft
Stationary
pintle
Gambar 26 Variable displacement axial piston pump
44
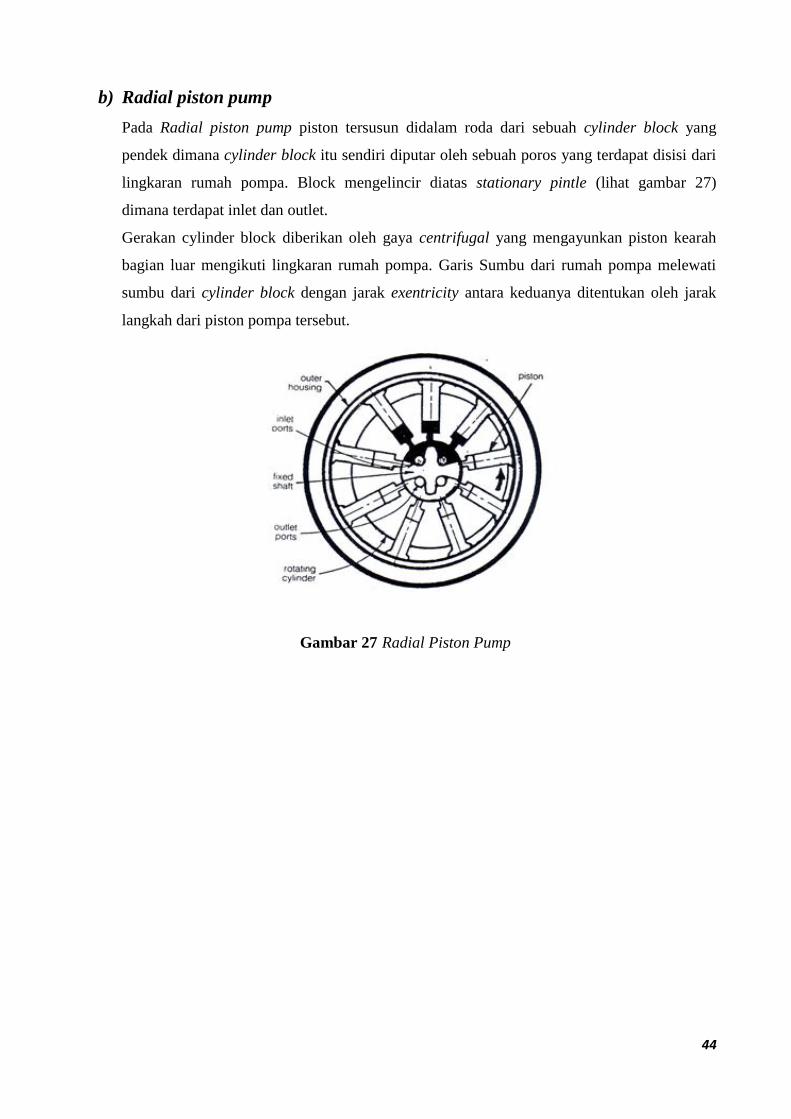
b) Radial piston pump
Pada Radial piston pump piston tersusun didalam roda dari sebuah cylinder block yang
pendek dimana cylinder block itu sendiri diputar oleh sebuah poros yang terdapat disisi dari
lingkaran rumah pompa. Block mengelincir diatas stationary pintle (lihat gambar 27)
dimana terdapat inlet dan outlet.
Gerakan cylinder block diberikan oleh gaya centrifugal yang mengayunkan piston kearah
bagian luar mengikuti lingkaran rumah pompa. Garis Sumbu dari rumah pompa melewati
sumbu dari cylinder block dengan jarak exentricity antara keduanya ditentukan oleh jarak
langkah dari piston pompa tersebut.
Gambar 27 Radial Piston Pump
45
BAB IV
KATUP HYDRAULIC
Hydraulic Valve
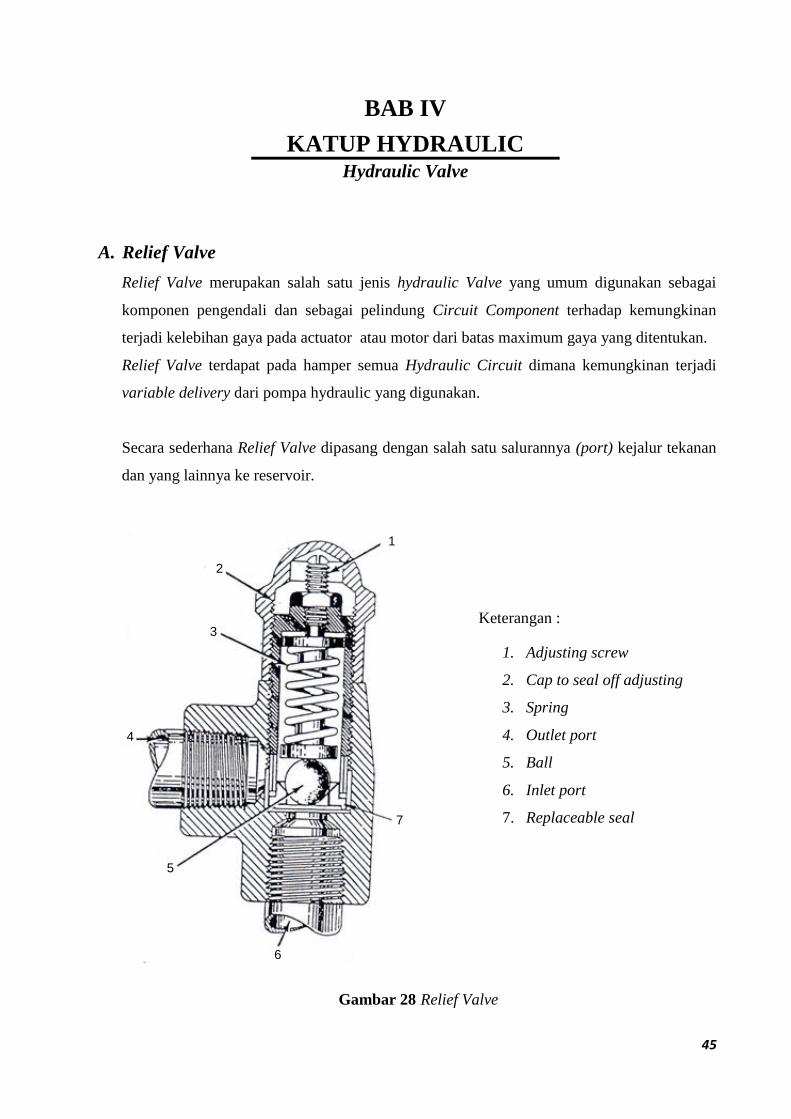
A. Relief Valve
Relief Valve merupakan salah satu jenis hydraulic Valve yang umum digunakan sebagai
komponen pengendali dan sebagai pelindung Circuit Component terhadap kemungkinan
terjadi kelebihan gaya pada actuator atau motor dari batas maximum gaya yang ditentukan.
Relief Valve terdapat pada hamper semua Hydraulic Circuit dimana kemungkinan terjadi
variable delivery dari pompa hydraulic yang digunakan.
Secara sederhana Relief Valve dipasang dengan salah satu salurannya (port) kejalur tekanan
dan yang lainnya ke reservoir.
2
7
6
5
4
3
1
Keterangan :
1. Adjusting screw
2. Cap to seal off adjusting
3. Spring
4. Outlet port
5. Ball
6. Inlet port
7. Replaceable seal
Gambar 28 Relief Valve
46
Gaya pegas akan menekan bola pada posisinya, operasi penekanan dapat diubah dengan
mengatur penekanan melalui Adjusting screw (lihat gambar 28). Apabila tekanan dari inlet
berlebihan pegas yang telah distel dengan gaya yang telah ditentukan maka kelebihan
tekanan tadi akan menekan bola dan pegas tidak mampu menahan kelebihan gaya tersebut,
akibatnya fluida akan memaksa masuk, kelebihan ini akan dialirkan oleh Relief Valve ke
reservoir melalui Outlet port.
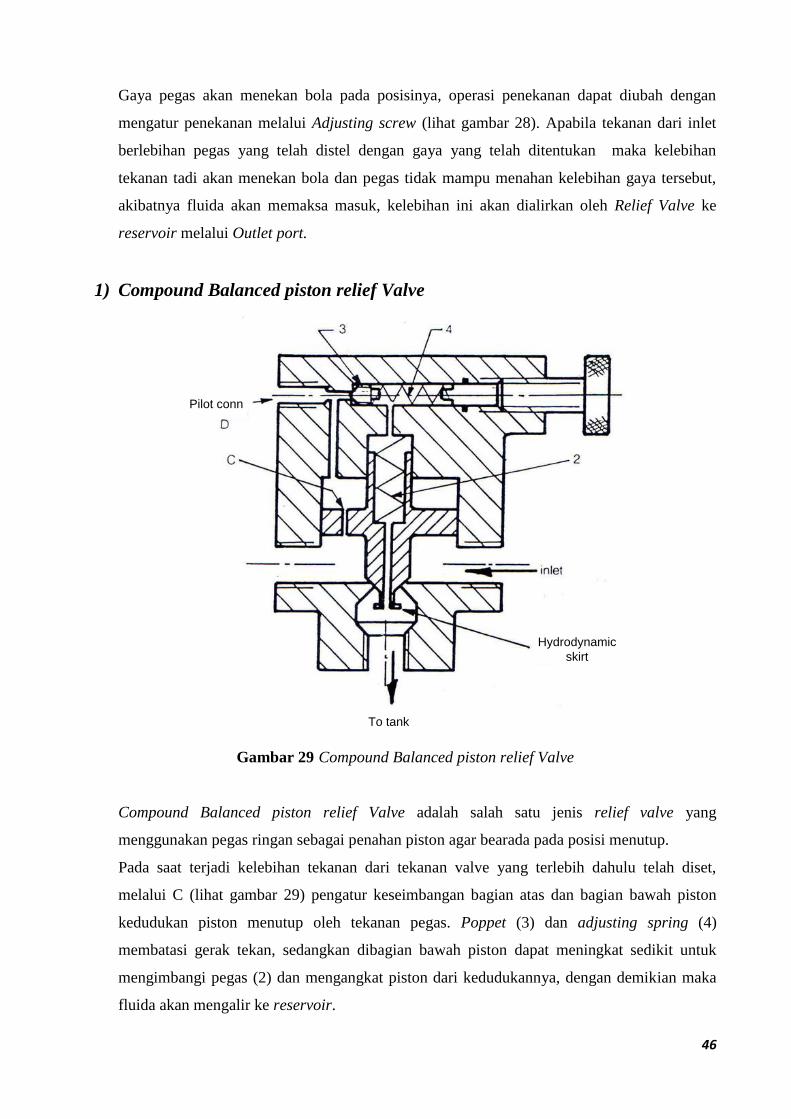
1) Compound Balanced piston relief Valve
Hydrodynamic
skirt
Pilot conn
To tank
Gambar 29 Compound Balanced piston relief Valve
Compound Balanced piston relief Valve adalah salah satu jenis relief valve yang
menggunakan pegas ringan sebagai penahan piston agar bearada pada posisi menutup.
Pada saat terjadi kelebihan tekanan dari tekanan valve yang terlebih dahulu telah diset,
melalui C (lihat gambar 29) pengatur keseimbangan bagian atas dan bagian bawah piston
kedudukan piston menutup oleh tekanan pegas. Poppet (3) dan adjusting spring (4)
membatasi gerak tekan, sedangkan dibagian bawah piston dapat meningkat sedikit untuk
mengimbangi pegas (2) dan mengangkat piston dari kedudukannya, dengan demikian maka
fluida akan mengalir ke reservoir.
47
Pada saat terjadi peningkatan aliran fluida valve ini hanya menghasilkan penambahan
kompresi dari kepegasan rendah pada pegas (2).
Compound Balanced piston relief Valve ini sering digunakan apabila pompa sedang dalam
keadan idle. Skirt yang berada dibagian bawah piston bekerja secara hydrodynamic untuk
menjaga jika terjadi tekanan yang lebih rendah. Aliran fluida akan menekan bagian atas Skirt
sehingga piston menutup secara cepat.
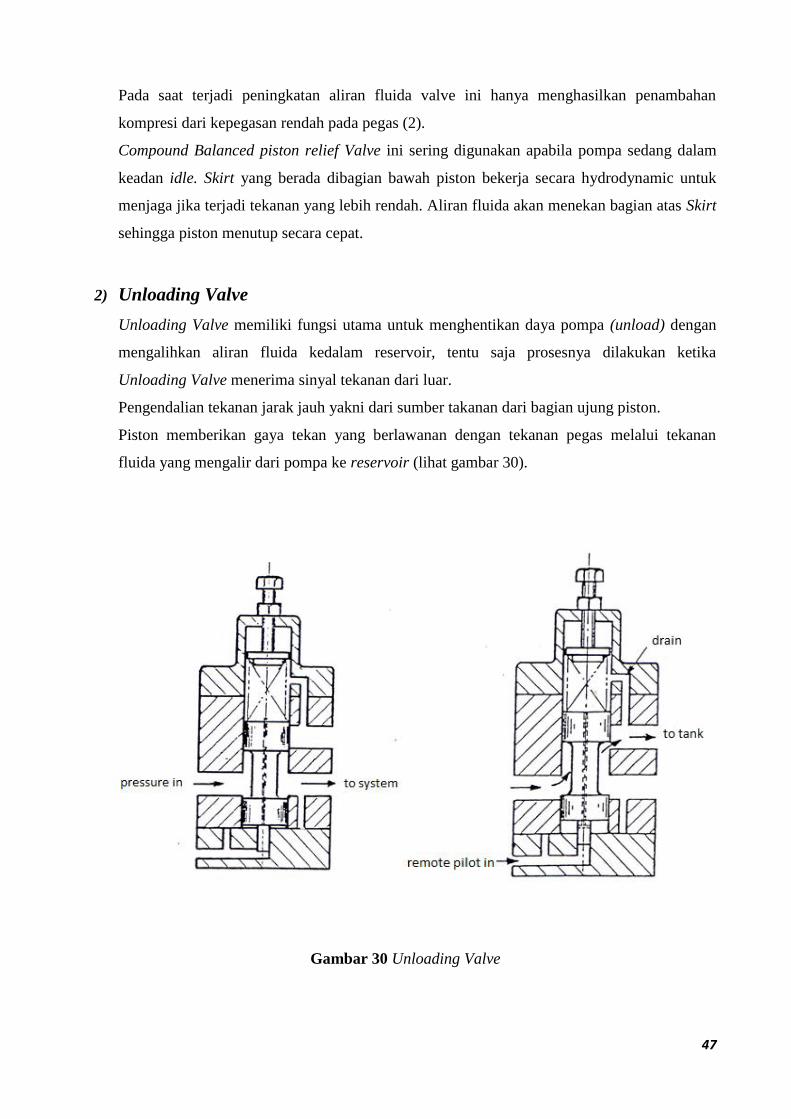
2) Unloading Valve
Unloading Valve memiliki fungsi utama untuk menghentikan daya pompa (unload) dengan
mengalihkan aliran fluida kedalam reservoir, tentu saja prosesnya dilakukan ketika
Unloading Valve menerima sinyal tekanan dari luar.
Pengendalian tekanan jarak jauh yakni dari sumber takanan dari bagian ujung piston.
Piston memberikan gaya tekan yang berlawanan dengan tekanan pegas melalui tekanan
fluida yang mengalir dari pompa ke reservoir (lihat gambar 30).
Gambar 30 Unloading Valve
48
Dari gambar 30 serta cara kerja dari valve ini nampak perbedaannya disbanding dengan relief
valve, dimana relief valve bekerja dibagian dalam sedangkan unloading valve bekerja dibagian
luar. Type dari valve ini kadang-kadang digunakan sebagai pengubah arah gerakan dari double
acting cylinder actuator.
M 1 L/s 0,2 L/s
Low
pressure
High
pressure
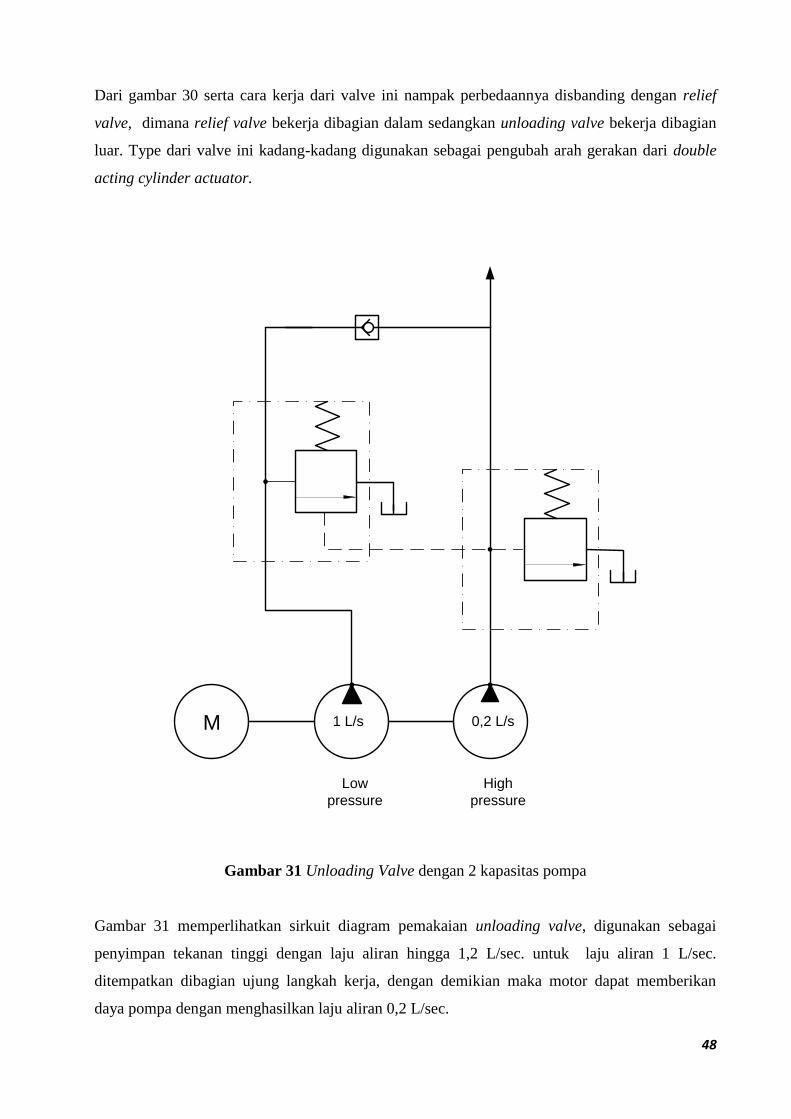
Gambar 31 Unloading Valve dengan 2 kapasitas pompa
Gambar 31 memperlihatkan sirkuit diagram pemakaian unloading valve, digunakan sebagai
penyimpan tekanan tinggi dengan laju aliran hingga 1,2 L/sec. untuk laju aliran 1 L/sec.
ditempatkan dibagian ujung langkah kerja, dengan demikian maka motor dapat memberikan
daya pompa dengan menghasilkan laju aliran 0,2 L/sec.
49
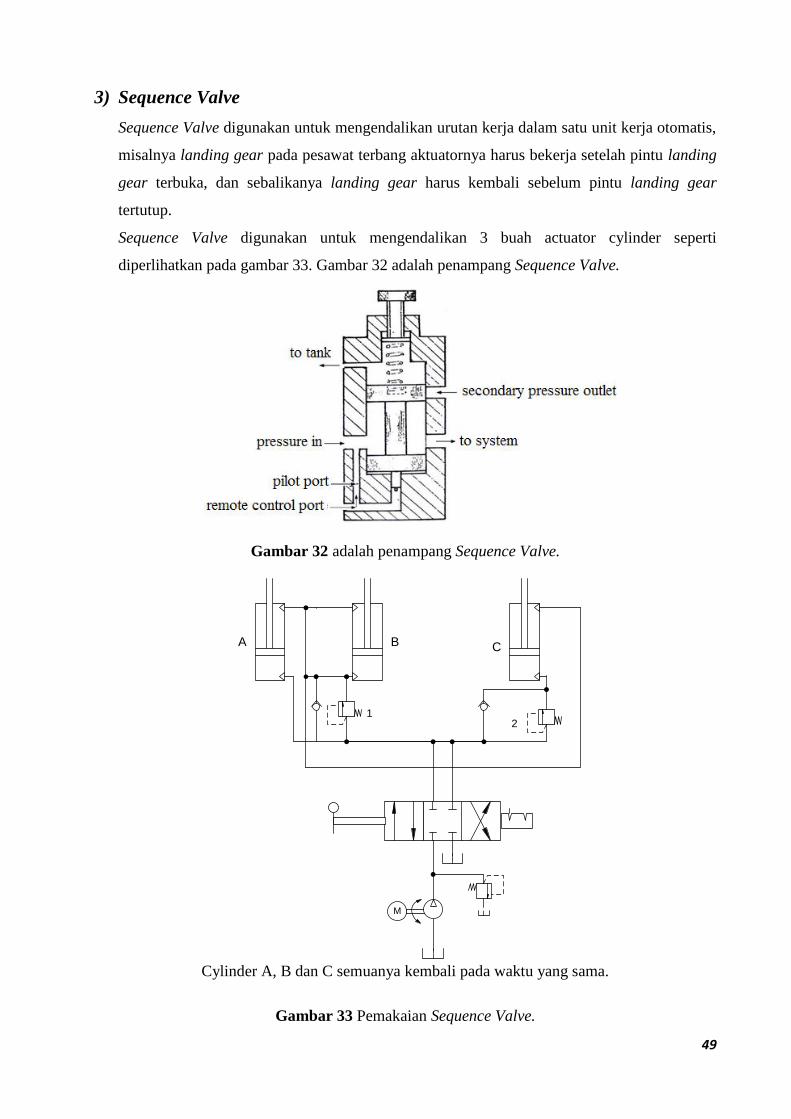
3) Sequence Valve
Sequence Valve digunakan untuk mengendalikan urutan kerja dalam satu unit kerja otomatis,
misalnya landing gear pada pesawat terbang aktuatornya harus bekerja setelah pintu landing
gear terbuka, dan sebalikanya landing gear harus kembali sebelum pintu landing gear
tertutup.
Sequence Valve digunakan untuk mengendalikan 3 buah actuator cylinder seperti
diperlihatkan pada gambar 33. Gambar 32 adalah penampang Sequence Valve.
Gambar 32 adalah penampang Sequence Valve.
M
A B C
12
Cylinder A, B dan C semuanya kembali pada waktu yang sama.
Gambar 33 Pemakaian Sequence Valve.
50
Pada sirkuit diagram yang diperlihatkan pada gambar 33 menunjukan bahwa fluida mengalir
bebas melalui directional control valve ke silinder A, Sequence Valve pertama (1) memblok
fluida tersebut hingga piston pada silinder A berkerak mencapai akhir langkah, pada saat
yang bersamaan Sequence Valve 1 membuka sehingga fluida mengalir ke silinder B.
Demikian gerakan berlanjut secara kontinyu hingga ketiga piston bergerak sesuai dengan
urutannya.
4) Flow-Control Valve
Factor perintah laju aliran fluida
Laju aliran fluida didalam hydraulic system tergantung pada factor-faktor berikut :
Ukuran pompa
Putaran pompa (rpm.)
Ukuran pipa
Jumlah bengkokan pada sirkuit
Pembatas pada sirkuit
Tekanan pada sirkuit (penghambat laju aliran)
Kondisi pompa
Viscositas oli
Pada industry modern engineering hydraulic memungkinkan untuk didesain dan dibangun dengan
sirkuit yang sangat komplek, untuk itu maka diperlukan valve pengatur laju aliran Flow-Control
Valve.
Kecepatan actuator, hydraulic cylinder atau motor ditentukan oleh berat dan jumlah fluida yang
akan dialirkan.
Hubungan antara gerak piston didalam silinder actuator yaitu jika volume aliran dari pompa itu besar
maka gerakan piston menjadi cepat, namun sebaliknya jika volume aliran fluida itu kecil maka gerak
piston menjadi lambat. Oleh karena itu variable kapasitas pompa memungkinkan untuk mengatur
kecepatan (feed) dari elemen kerja (actuator).Jika demikian kebutuhan system didalam sirkuit
dapat diatur dengan Flow-Control Valve.
Macam-macam type Flow-Control Valve
Untuk mengetahui macam-macam type dari Flow-Control Valve dapat dilihat pada table berikut,
namun secara umum type Flow-Control Valve itu meliputi :
51
Plug,gate, globe and nidle valve, restrictors, orifice, check valve, pressure compensated and
temperature-compensated valve.
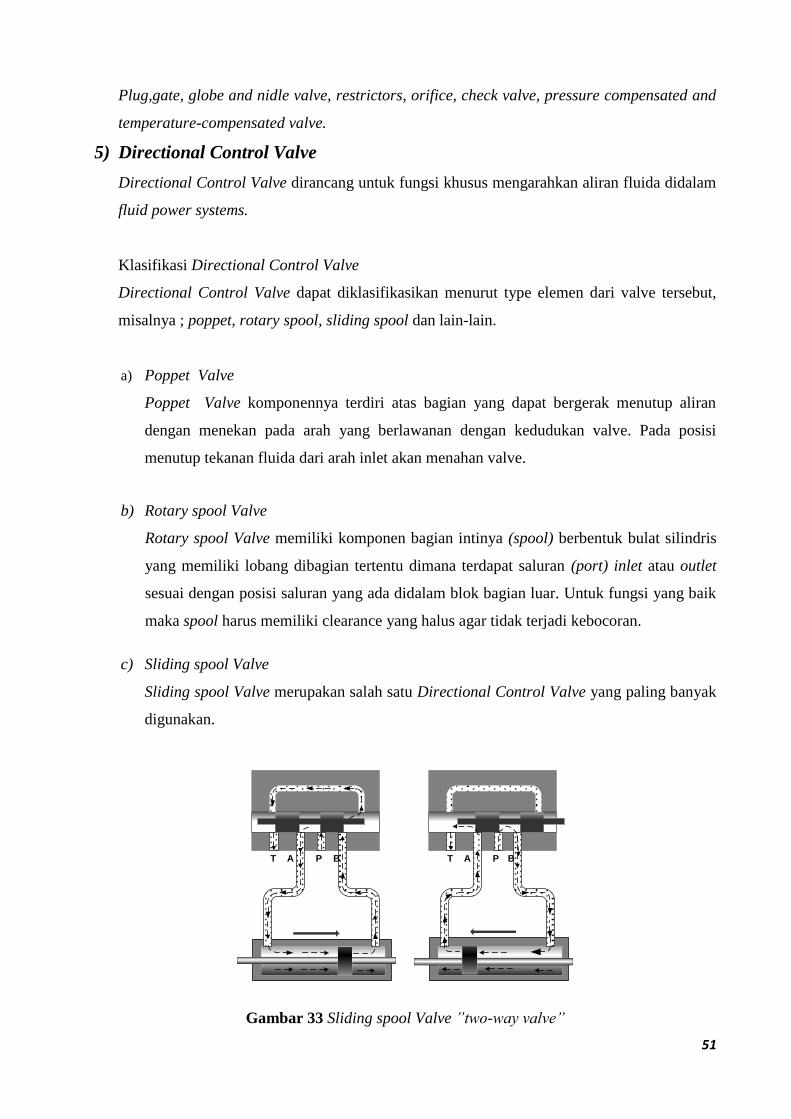
5) Directional Control Valve
Directional Control Valve dirancang untuk fungsi khusus mengarahkan aliran fluida didalam
fluid power systems.
Klasifikasi Directional Control Valve
Directional Control Valve dapat diklasifikasikan menurut type elemen dari valve tersebut,
misalnya ; poppet, rotary spool, sliding spool dan lain-lain.
a) Poppet Valve
Poppet Valve komponennya terdiri atas bagian yang dapat bergerak menutup aliran
dengan menekan pada arah yang berlawanan dengan kedudukan valve. Pada posisi
menutup tekanan fluida dari arah inlet akan menahan valve.
b) Rotary spool Valve
Rotary spool Valve memiliki komponen bagian intinya (spool) berbentuk bulat silindris
yang memiliki lobang dibagian tertentu dimana terdapat saluran (port) inlet atau outlet
sesuai dengan posisi saluran yang ada didalam blok bagian luar. Untuk fungsi yang baik
maka spool harus memiliki clearance yang halus agar tidak terjadi kebocoran.
c) Sliding spool Valve
Sliding spool Valve merupakan salah satu Directional Control Valve yang paling banyak
digunakan.
T BPA T BPA
Gambar 33 Sliding spool Valve ”two-way valve”
52
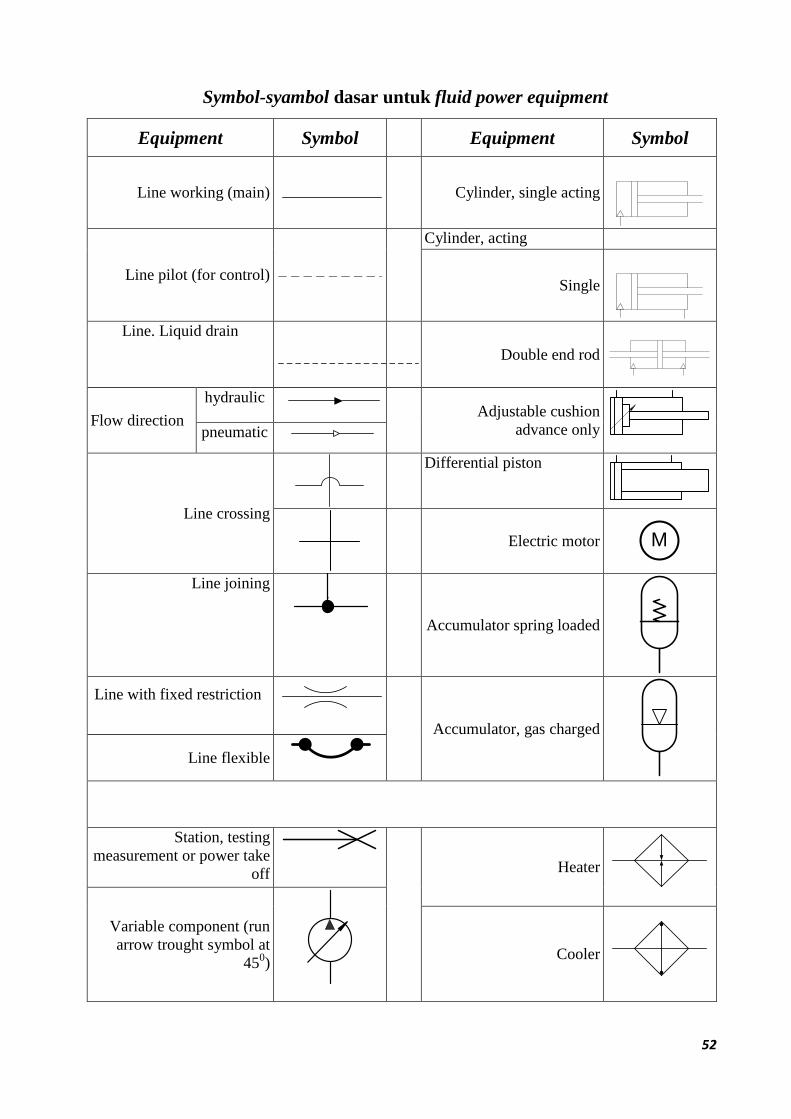
Symbol-syambol dasar untuk fluid power equipment
Equipment Symbol Equipment Symbol
Line working (main)
Cylinder, single acting
Line pilot (for control)
Cylinder, acting
Single
Line. Liquid drain
Double end rod
Flow direction
hydraulic
Adjustable cushion
advance only
pneumatic
Line crossing
Differential piston
Electric motor M
Line joining
Accumulator spring loaded
Line with fixed restriction
Accumulator, gas charged
Line flexible
Station, testing
measurement or power take
off
Heater
Variable component (run
arrow trought symbol at
450)
Cooler
53
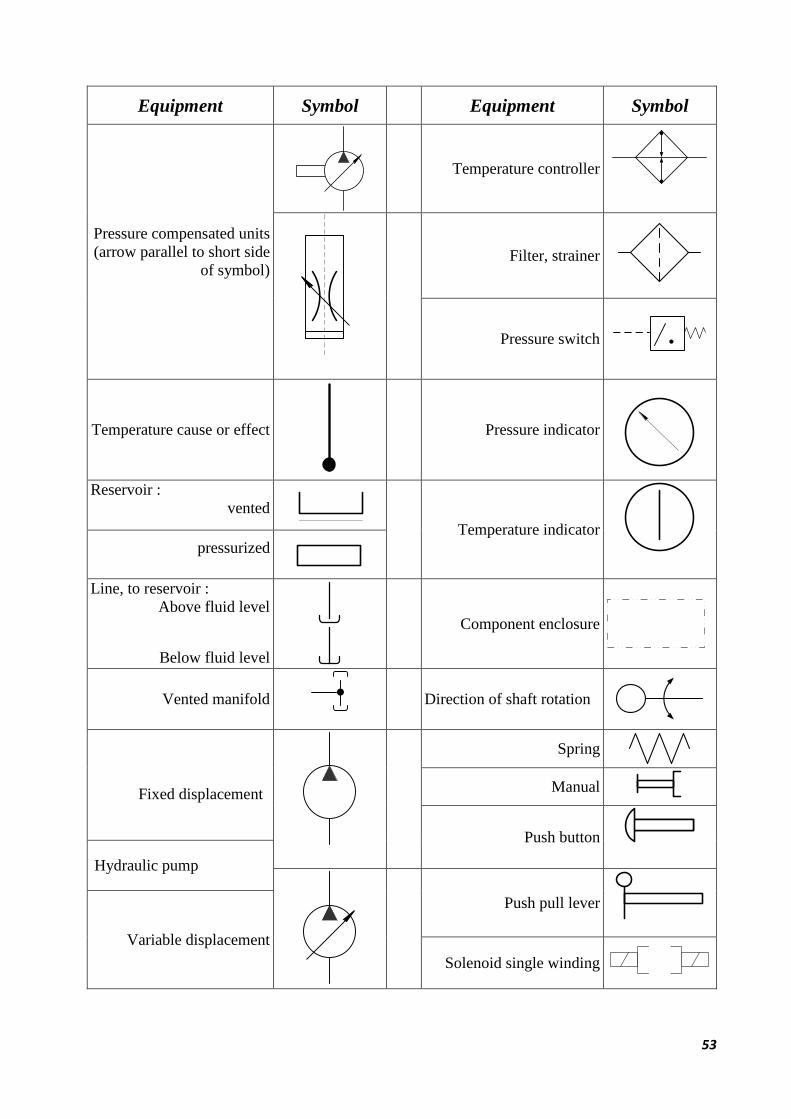
Equipment Symbol Equipment Symbol
Pressure compensated units
(arrow parallel to short side
of symbol)
Temperature controller
Filter, strainer
Pressure switch
Temperature cause or effect
Pressure indicator
Reservoir :
vented
Temperature indicator
pressurized
Line, to reservoir :
Above fluid level
Below fluid level
Component enclosure
Vented manifold
Direction of shaft rotation
Fixed displacement
Spring
Manual
Push button
Hydraulic pump
Push pull lever
Variable displacement
Solenoid single winding
54
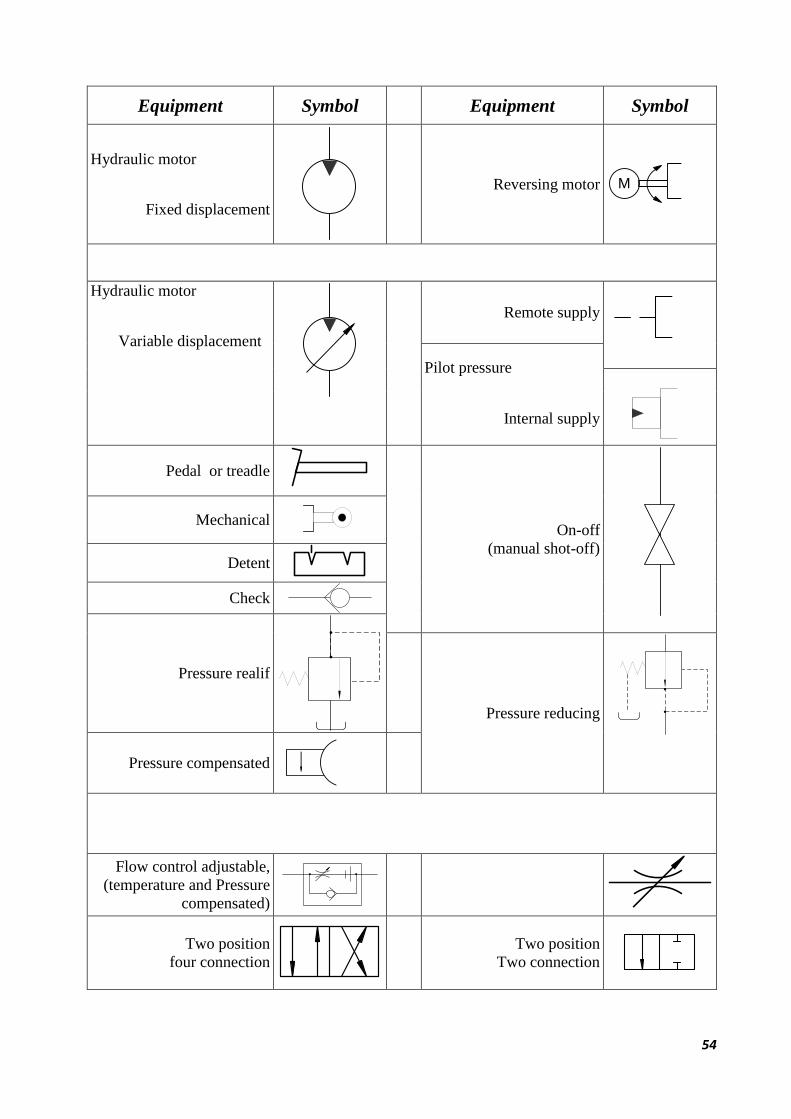
Equipment Symbol Equipment Symbol
Hydraulic motor
Fixed displacement
Reversing motor M
Hydraulic motor
Variable displacement
Remote supply
Pilot pressure
Internal supply
Pedal or treadle
On-off
(manual shot-off)
Mechanical
Detent
Check
Pressure realif
Pressure reducing
Pressure compensated
Flow control adjustable,
(temperature and Pressure
compensated)
Two position
four connection
Two position
Two connection
55
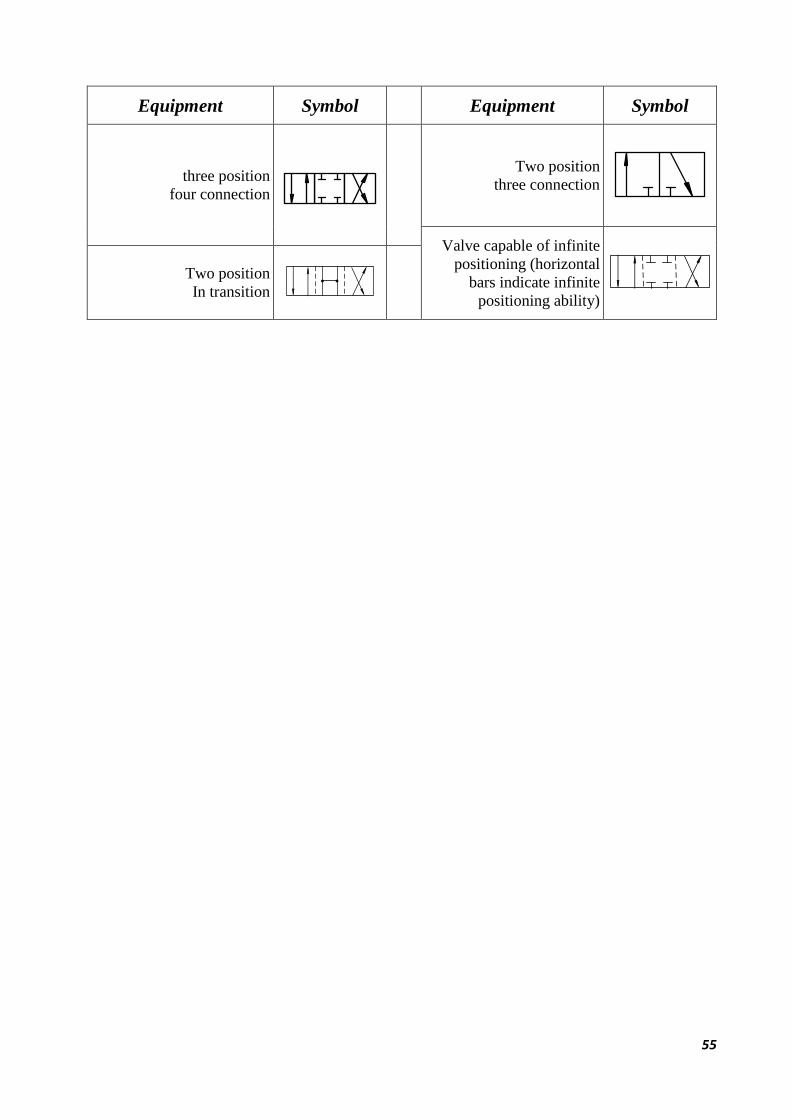
Equipment Symbol Equipment Symbol
three position
four connection
Two position
three connection
Valve capable of infinite
positioning (horizontal
bars indicate infinite
positioning ability)
Two position
In transition
Related Documents











