Introduction to Computer Vision Lecture 10 Chapter 6: Geometric Transformations Speaker: Yuheng Wang Email: [email protected] Date: 01/26 /2012 1

CV_Lec10_Geometric_Transform.ppt
Nov 29, 2015
Geometric
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Introduction to Computer VisionLecture 10
Chapter 6: Geometric Transformations
Speaker: Yuheng WangEmail: [email protected]
Date: 01/26 /2012
1

Outline
• Geometric Transformation Theory– Linear transformations– Affine transformations– Projective transformations
• Matlab Implementation
2
Geometric Transformations
• Original Image
3
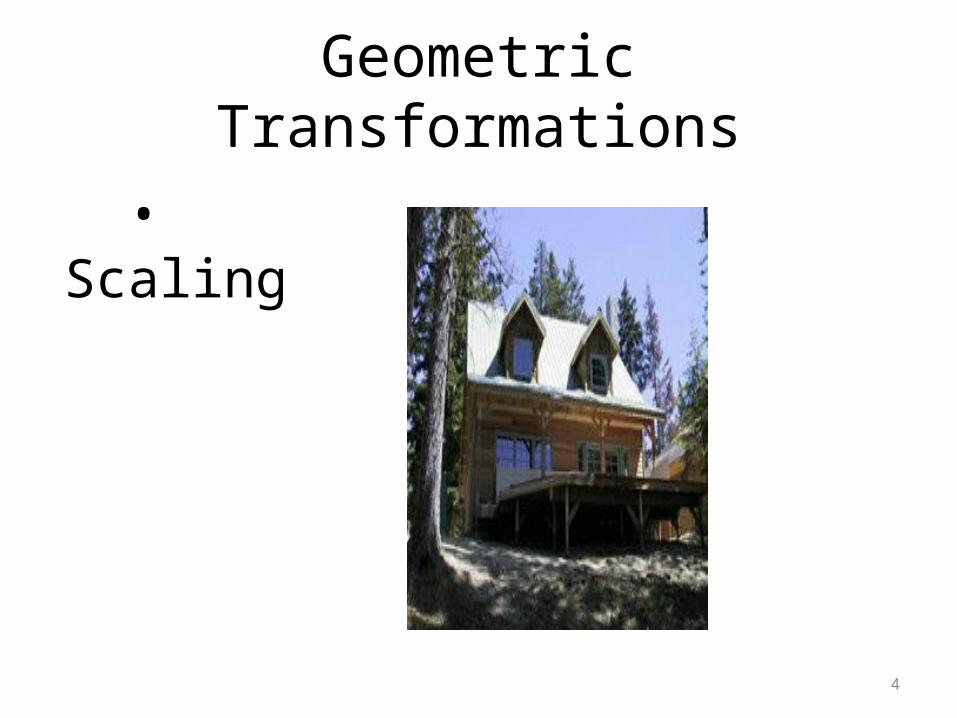
Geometric Transformations
• Scaling
4
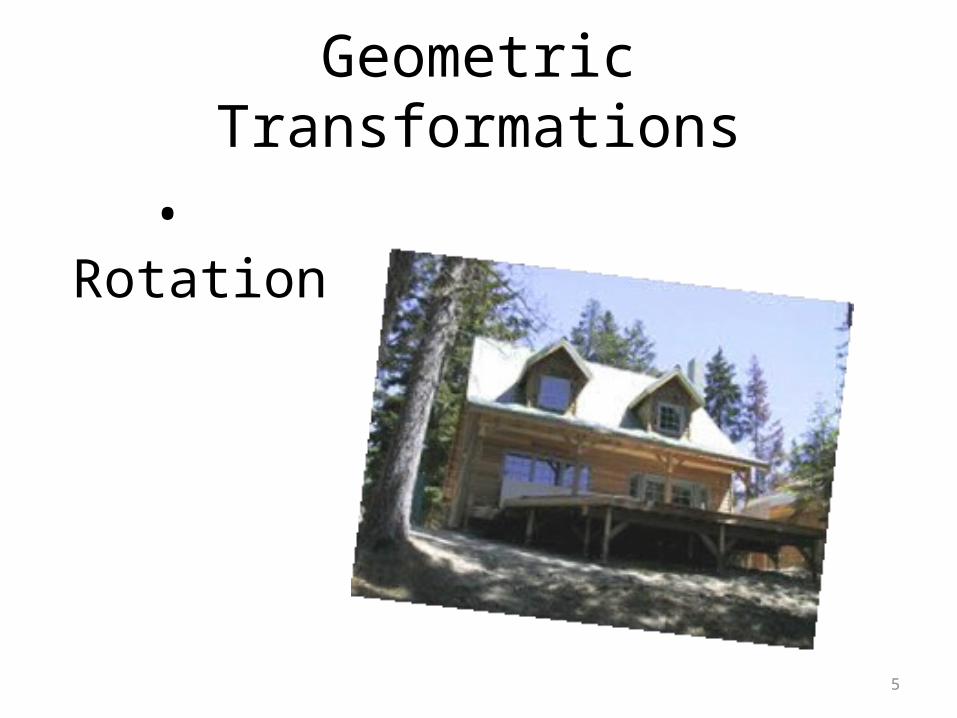
Geometric Transformations
• Rotation
5

Geometric Transformations
• Affine Transformation
6

Geometric Transformations
• Projective Transformation
7

Coordinate Mapping
• Transformation: (x, y) = T{(w, z)}
f(w, z) g(x, y )
T(w, z)
x
y
w
z
8

Coordinate Mapping
• Transformation: (w, z) = T-1{(x, y)}
f(w, z) g(x, y )w x
T-1 (x, y)
z y
9

Transformations: (x, y) = T{(w, z)} = (w/2, z/2)(w, z) = T-1{(x, y)} = (2x, 2y)
(x, y) = (w/2, z/2)
(w, z) = (2x, 2y)Textbook Page 280Figure 6.2
10

Linear Transformations
• An operation than change the figure in some way, can be either or a combination of:– Translation: “slide”–Rotation: “turn”–Reflection: “flip”
Reference:http://www.cs.mtu.edu/~shene/COURSES/cs3621/NOTES/geometry//geo-tran.html
11

Translation
• Move the object without changing the image size and orientation
12
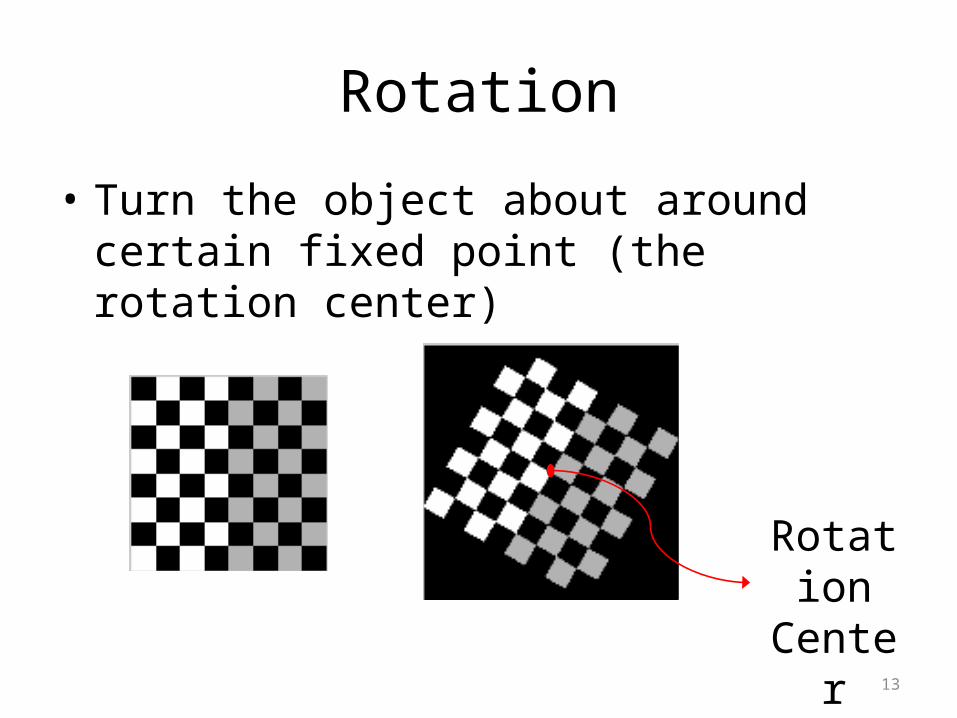
Rotation
• Turn the object about around certain fixed point (the rotation center)
Rotation
Center13
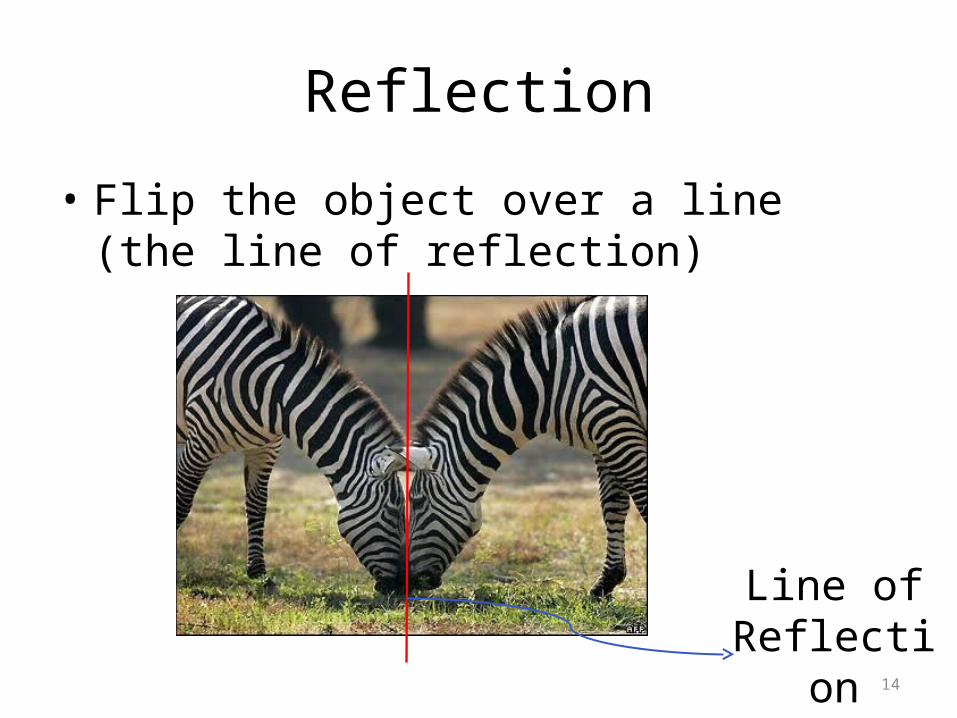
Reflection
• Flip the object over a line (the line of reflection)
Line of Reflection
14
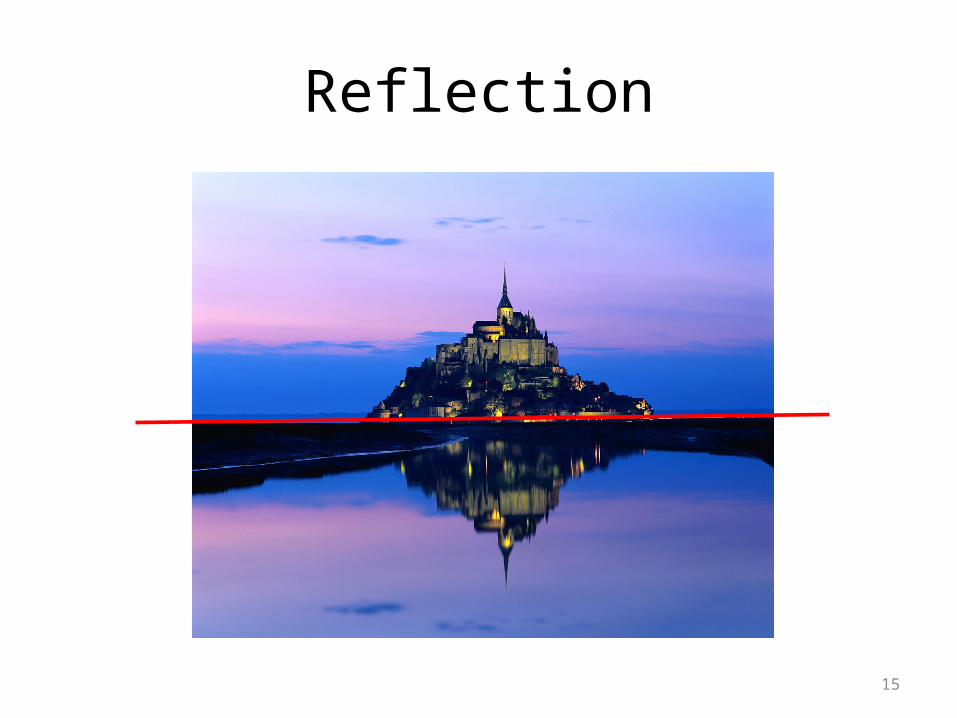
Reflection
15
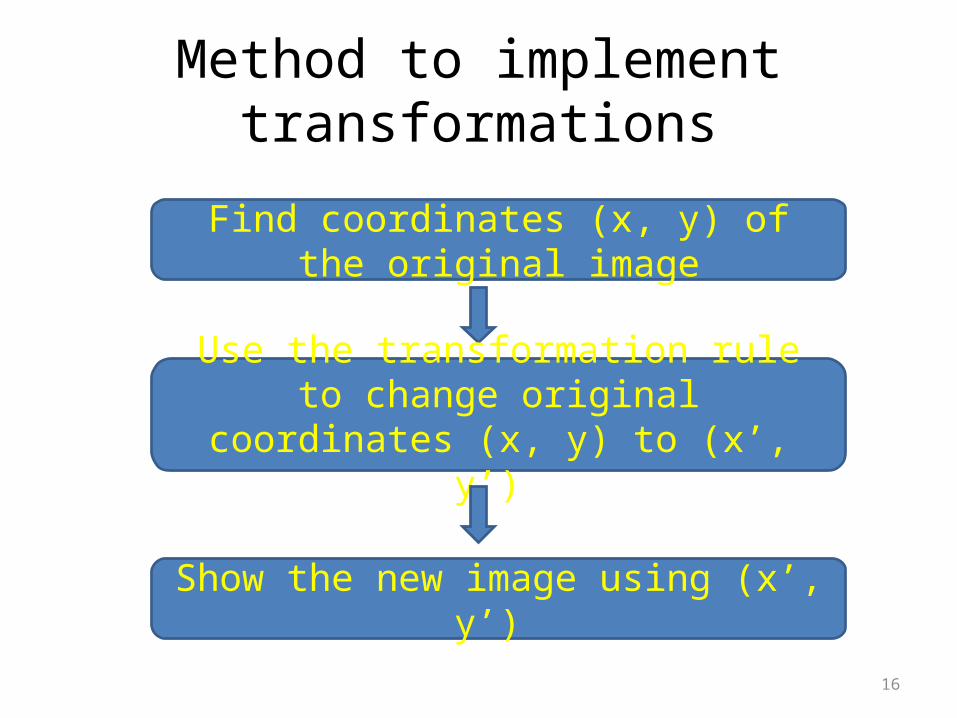
Method to implement transformations
Find coordinates (x, y) of the original image
Use the transformation rule to change original coordinates (x, y) to (x’, y’)
Show the new image using (x’, y’)
16

Translation
x’ 1 1 2
y’ 2 0 0
x -3 -3 -2
y 3 1 1
x
y
0
x’= x + 4y’= y - 1
17

Rotation
x’ -5 -3 -3
y’ 1 1 2
x -3 -3 -2
y 3 1 1
x
y
0
theta = 90o
18

Reflection
x’ -3 -3 -2
y’ -3 -1 -1
x -3 -3 -2
y 3 1 1
x
y
0
19

Scaling
x’ -3 -3 -2
y’ -3 -1 -1
x -3 -3 -2
y 3 1 1
x
y
0
20

Scaling
x’ -3 -3 2
y’ 4 1 1
x -3 -3 -2
y 3 1 1x
y
0
• multiplying each of its coordinates by a scalar
21

Overall workflow
Find coordinates (x, y) of the original image
Use the transformation rule to change original coordinates (x, y) to (x’, y’)
Show the new image using (x’, y’)
22

Mathematical Definition
• A geometric transformation is a matrix(vector) T that maps the pixel (x, y) to a new position (x’, y’)
x’ = Tx(x, y)
y’=Ty(x, y)
23

Linear Transformations Recall:
x’ = Tx(x, y) y’=Ty(x, y)
yaxax 10' ybxby 10'
yxba
bayx *''
11
00
Matrix FormatPolynomial Format
Transformation Matrix T
24
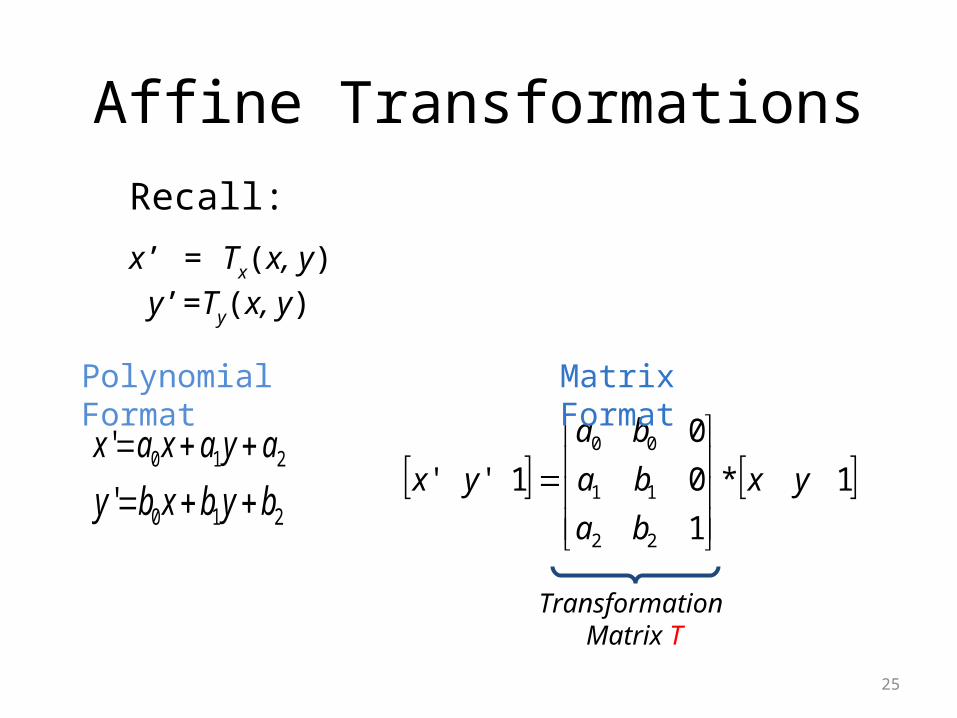
Affine Transformations
210' ayaxax
210' bybxby 1*
1
0
0
1''
22
11
00
yx
ba
ba
ba
yx
Matrix FormatPolynomial Format
Transformation Matrix T
Recall:
x’ = Tx(x, y) y’=Ty(x, y)
25

Affine Transformations
• Perceptually, Affine Transformations are linear combinations of – Translation – Rotation– Scaling
26
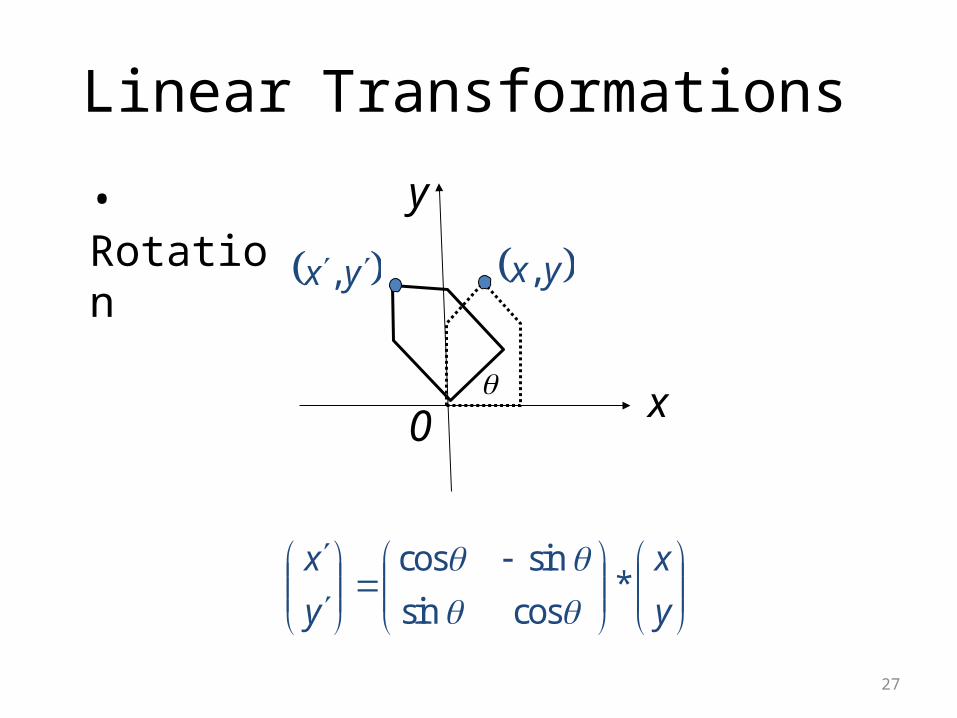
Linear Transformations
y
x
y
x*
cossin
sincos
yx, yx ,
x
y
0
• Rotation
27
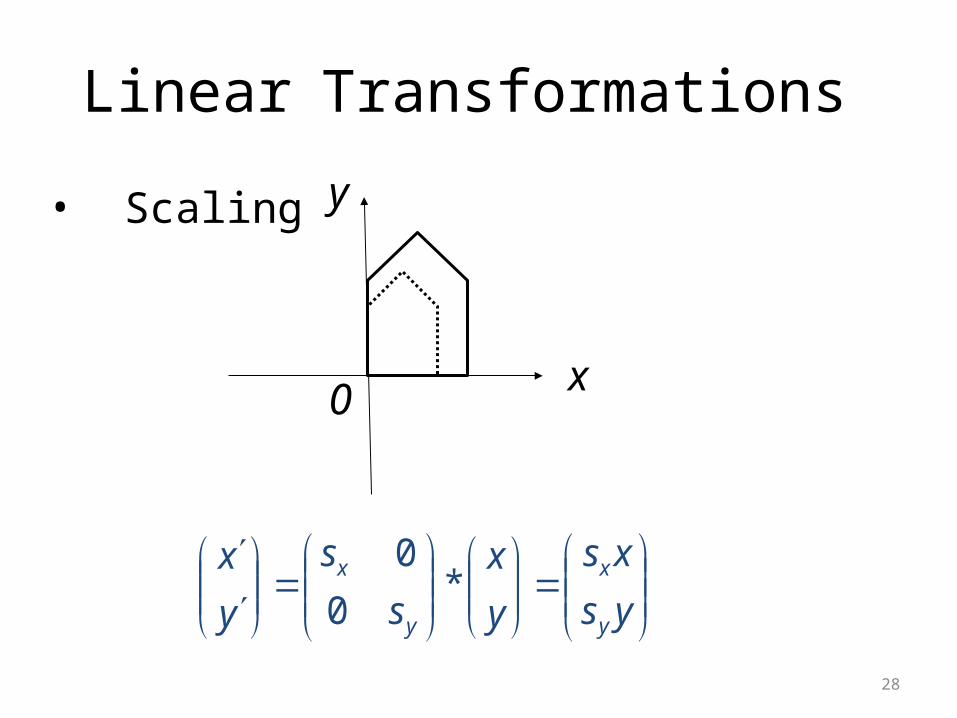
Linear Transformations
ys
xs
y
x
s
s
y
x
y
x
y
x*
0
0
x
y
0
• Scaling
28
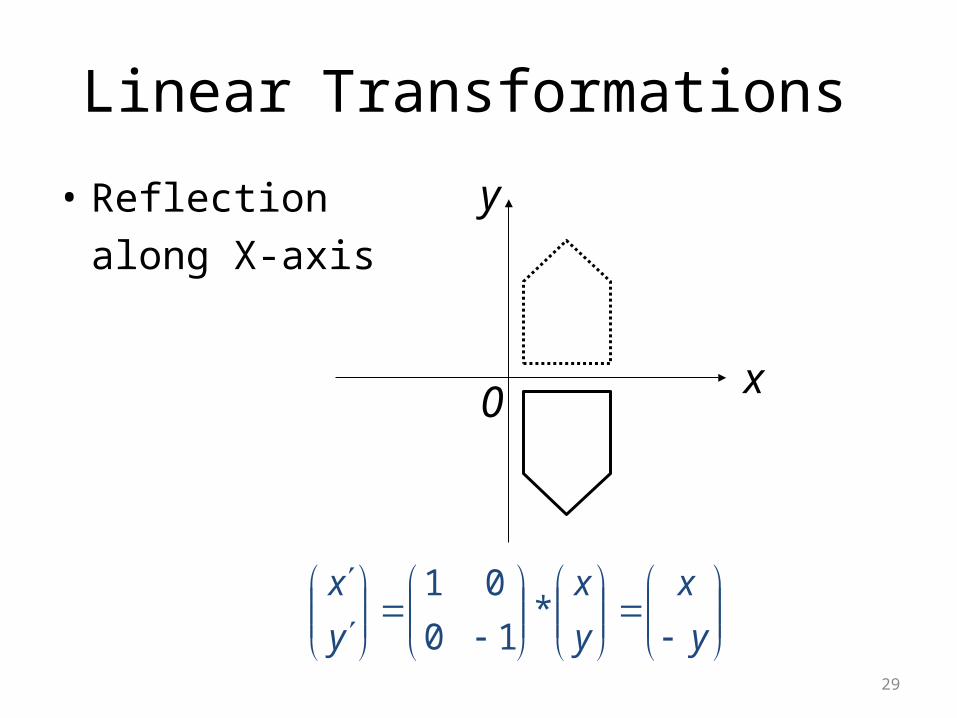
Linear Transformations
• Reflectionalong X-axis
y
x
y
x
y
x*
10
01
x
y
0
29

Linear Transformations
• Reflection along Y-axis
y
x
y
x
y
x*
10
01
x
y
0
30

Linear Transformations
• Shearing along X-axis
y
dyx
y
xd
y
x
10
1
x
y
0
31

Linear Transformations
• Shearing along Y-axis
dxy
x
y
x
dy
x
1
01
x
y
0
32
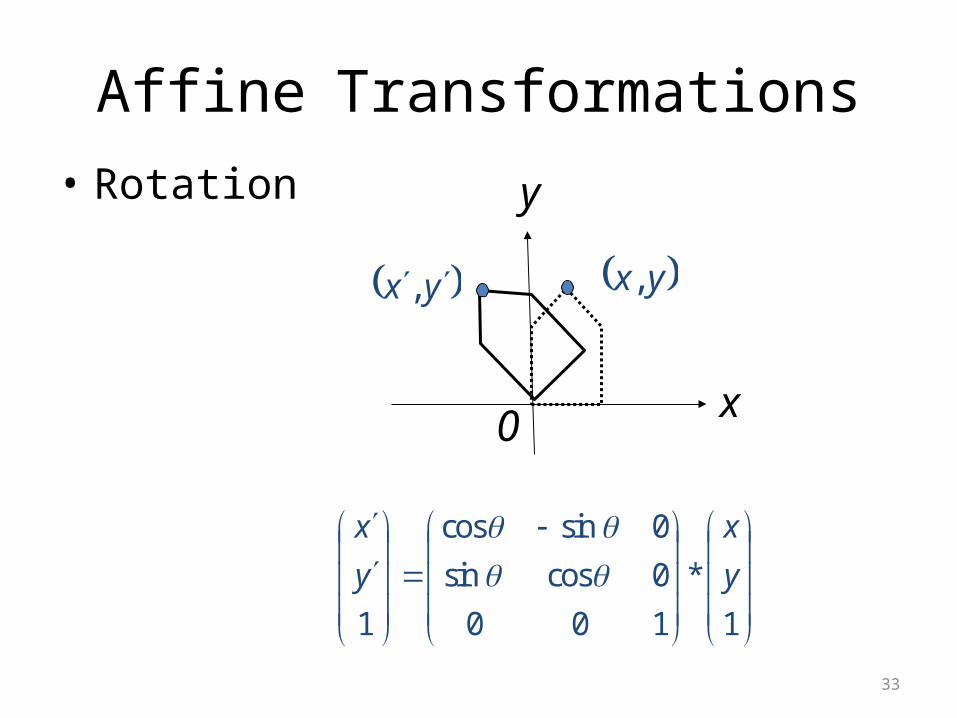
Affine Transformations• Rotation
1
*
100
0cossin
0sincos
1
y
x
y
x
yx, yx ,
x
y
0
33
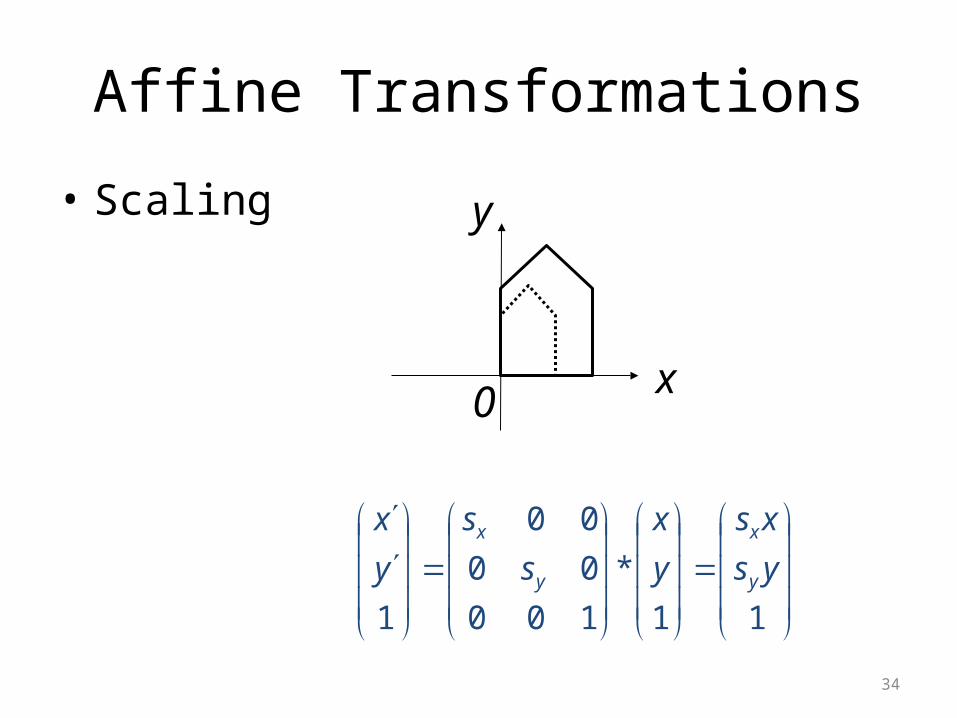
Affine Transformations
• Scaling
11
*
100
00
00
1
ys
xs
y
x
s
s
y
x
y
x
y
x
x
y
0
34
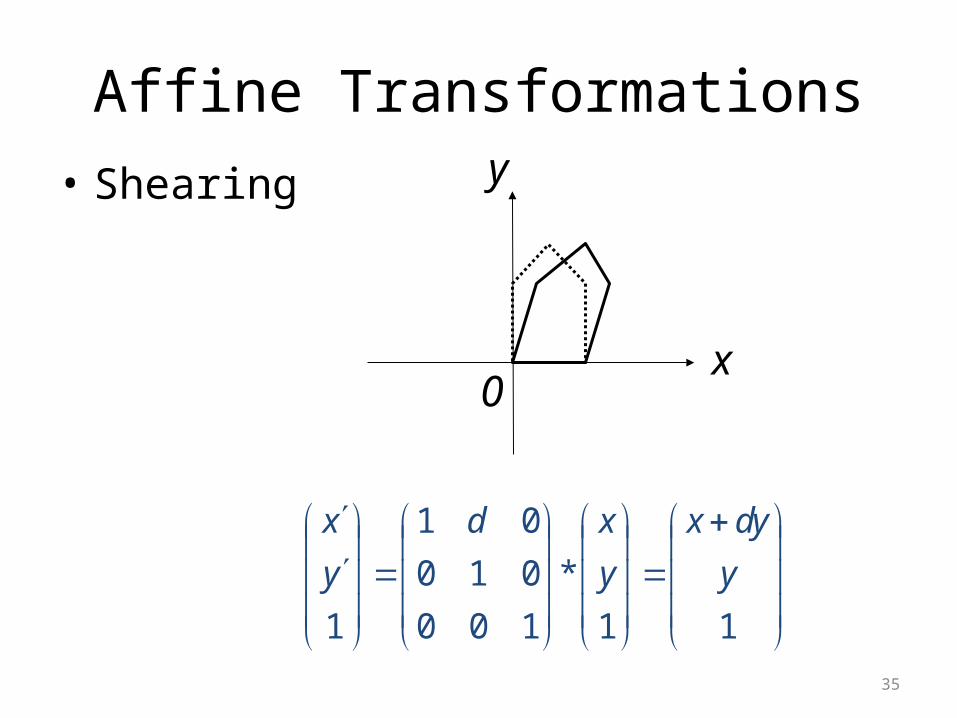
Affine Transformations• Shearing
11
*
100
010
01
1
y
dyx
y
xd
y
x
x
y
0
35
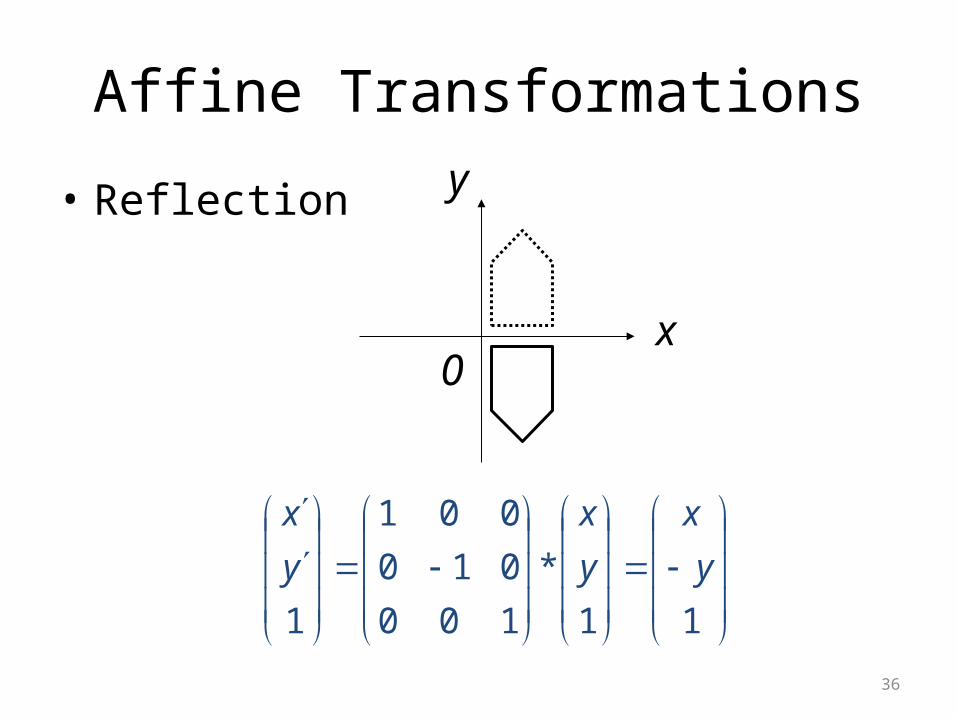
Affine Transformations
• Reflection
11
*
100
010
001
1
y
x
y
x
y
x
x
y
0
36
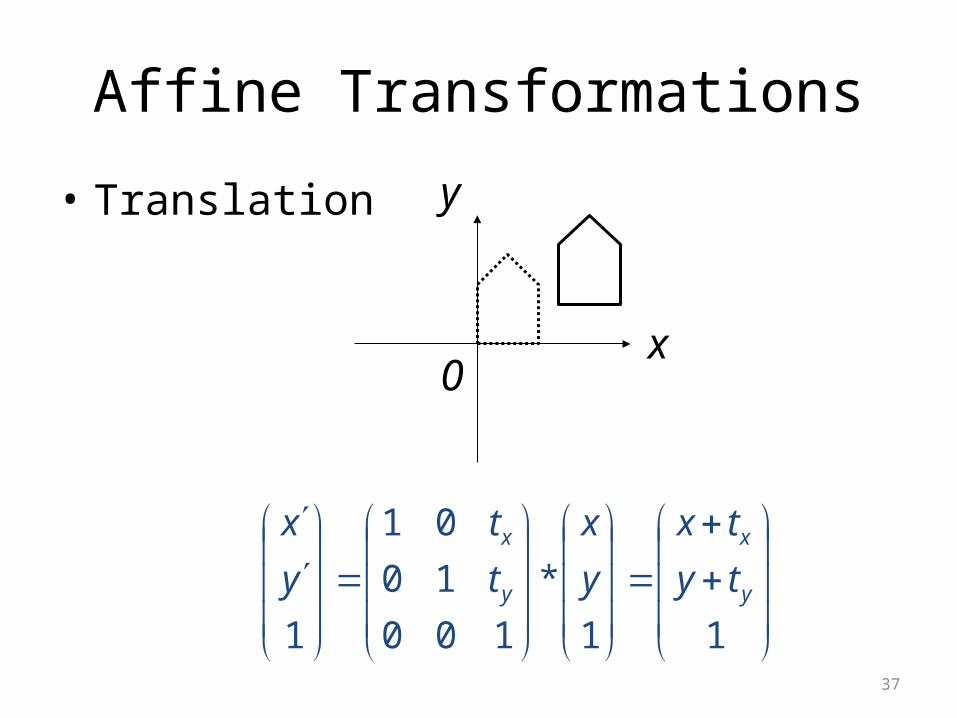
Affine Transformations
• Translation
11
*
100
10
01
1y
x
y
x
ty
tx
y
x
t
t
y
x
x
y
0
37

Summary
1
*
100
00
00
1
y
x
s
s
y
x
y
x
1
*
100
0cossin
0sincos
1
y
x
y
x
1
*
100
01
01
1
y
x
sh
sh
y
x
y
x
1
*
100
10
01
1
y
x
t
t
y
x
y
x
Translation Scaling
ShearingRotation
38
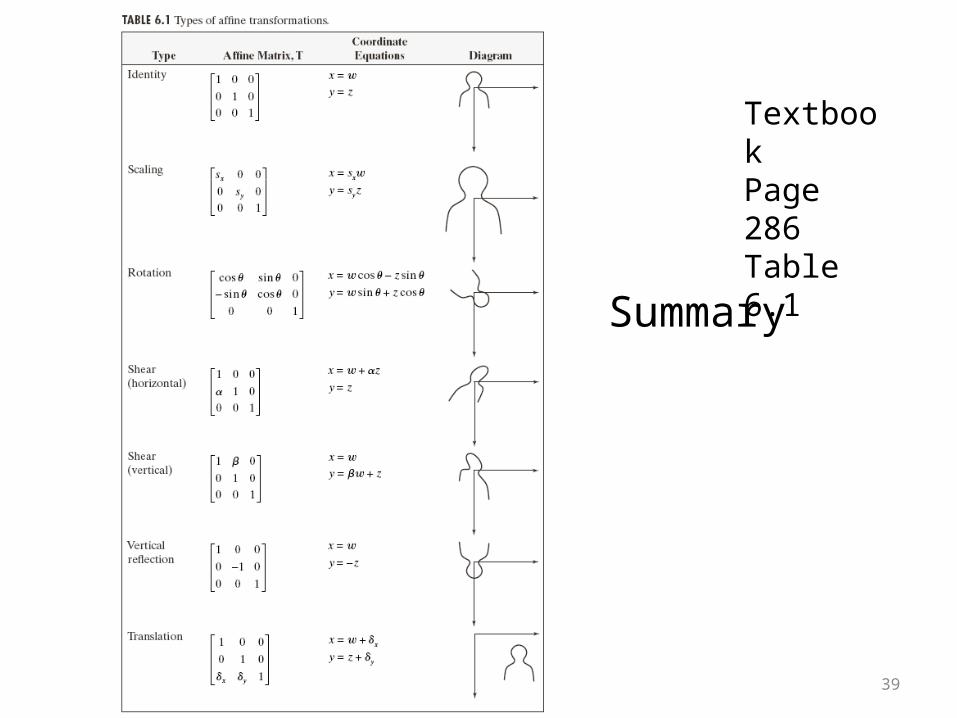
Textbook Page 286Table 6.1
Summary
39
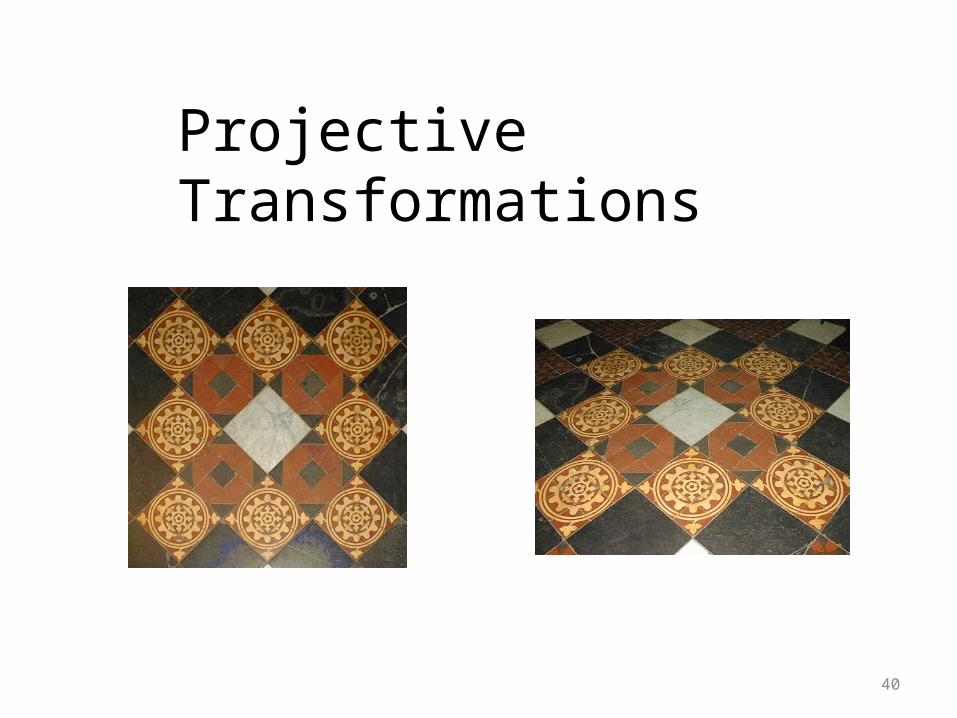
Projective Transformations
40
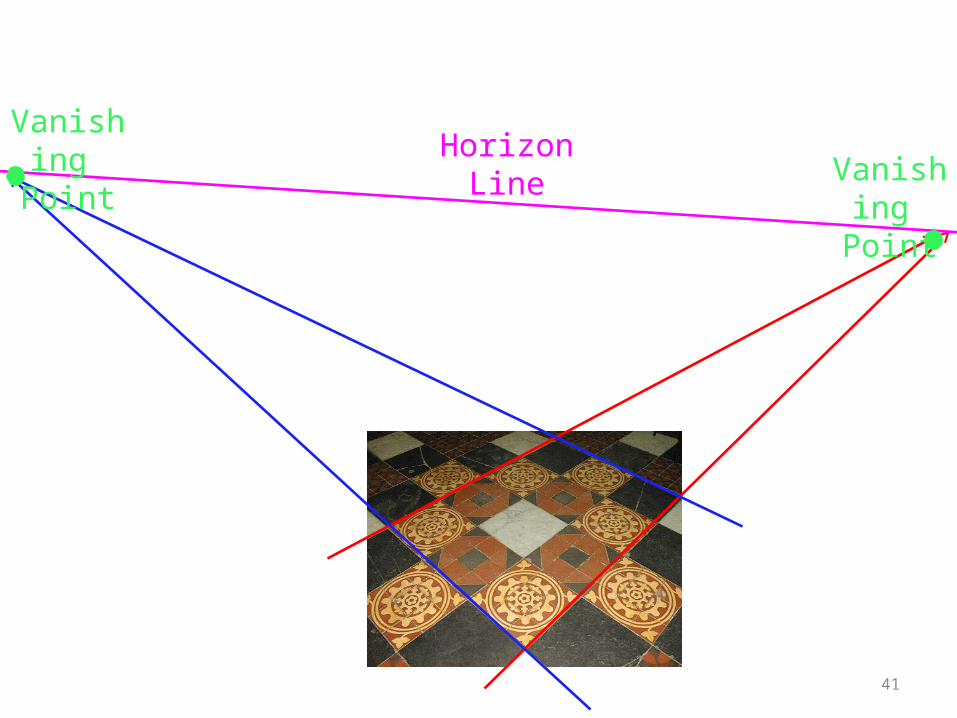
Vanishing Point
Vanishing Point Horizon
Line
41
Matlab Implementation
• Transformation Techniques– Affine Transformations– Projective Transformations
• Matlab Implementation– function maketform– function imtransform
42

help maketform
• maketform Create spatial transformation structure (TFORM).
• T = maketform(TRANSFORMTYPE,...) creates a multidimensional spatial transformation structure (a 'TFORM struct') that can be used with TFORMFWD, TFORMINV, FLIPTFORM, IMTRANSFORM, or TFORMARRAY. TRANSFORMTYPE can be 'affine', 'projective', 'custom', 'box', or 'composite'. Spatial transformations are also called geometric transformations.
• ……
43
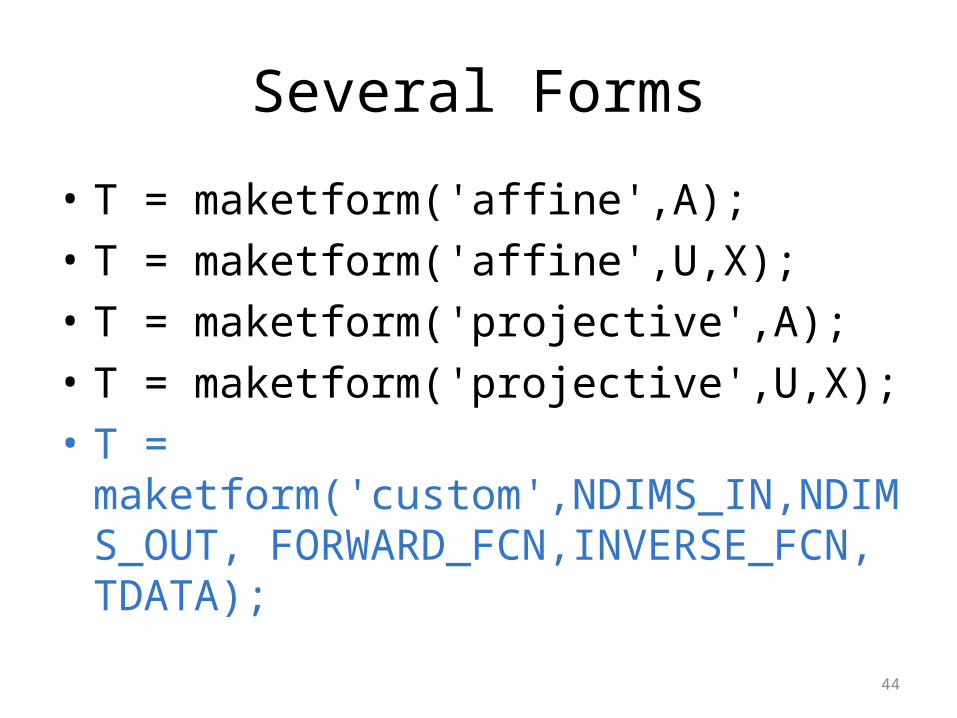
Several Forms
• T = maketform('affine',A);• T = maketform('affine',U,X);• T = maketform('projective',A);• T = maketform('projective',U,X);• T =
maketform('custom',NDIMS_IN,NDIMS_OUT, FORWARD_FCN,INVERSE_FCN, TDATA);
44

T = maketform('custom',NDIMS_IN, NDIMS_OUT,FORWARD_FCN,INVERSE_FCN, TDATA
• Parameters– NDIMS_IN and NDIMS_OUT are the numbers of input
and output dimensions. – FORWARD_FCN and INVERSE_FCN are function
handles to forward and inverse functions. – TDATA can be any MATLAB array and is typically used
to store parameters of the custom transformation. It is accessible to FORWARD_FCN and INVERSE_FNC via the "tdata" field of T.
45
help imtransform
• imtransform Apply 2-D spatial transformation to image.
• B = imtransform(A,TFORM) transforms the image A according to the 2-D spatial transformation defined by TFORM, which is a tform structure as returned by MAKETFORM or CP2TFORM. If ndims(A) > 2, such as for an RGB image, then the same 2-D transformation is automatically applied to all 2-D planes along the higher dimensions.
• ……
46
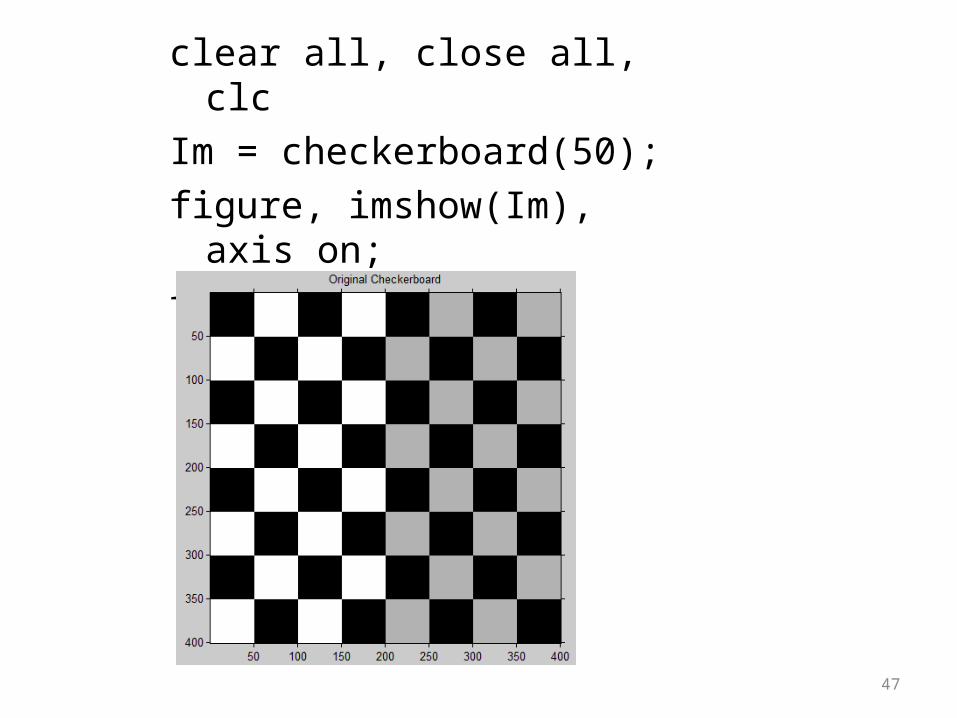
clear all, close all, clcIm = checkerboard(50);figure, imshow(Im), axis on;title('Original Checkerboard');
47

Im = imread('cameraman.tif');figure, imshow(Im), axis on;title(‘Fig.1. Original Gray Scale Image');
axis on
48
Matlab for Scaling
sx=0.5; sy=1; Tscale=[sx 0 0; 0 sy 0; 0 0 1];tScale=maketform('affine',Tscale);ImScale=imtransform(Im, tScale);figure, imshow(ImScale), axis on;title('Scaled Checkerboard');
Textbook Page 289
49
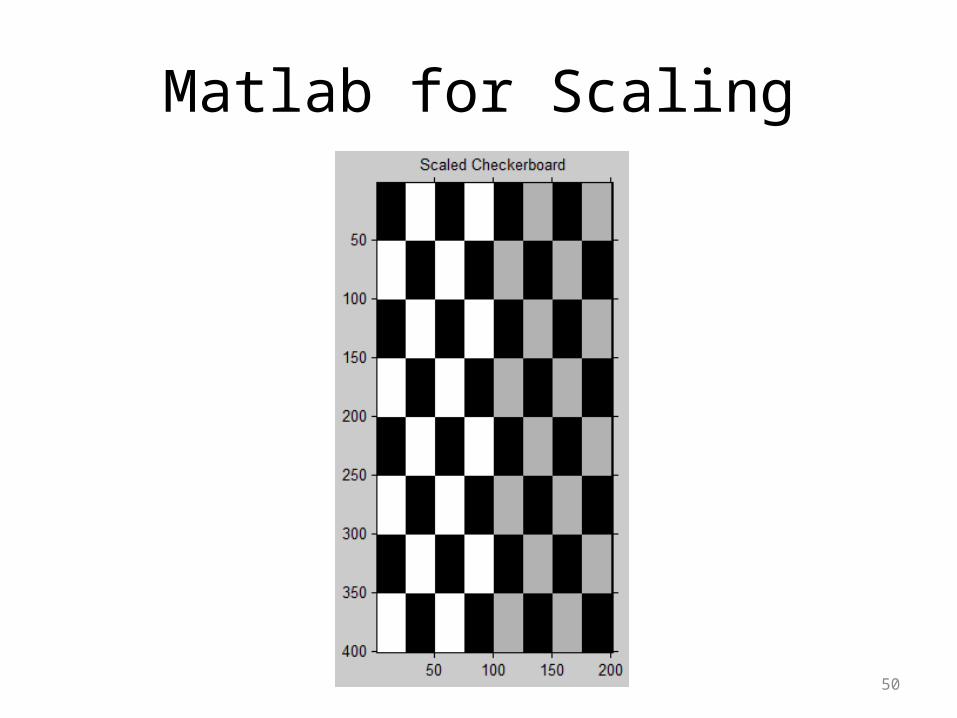
Matlab for Scaling
50
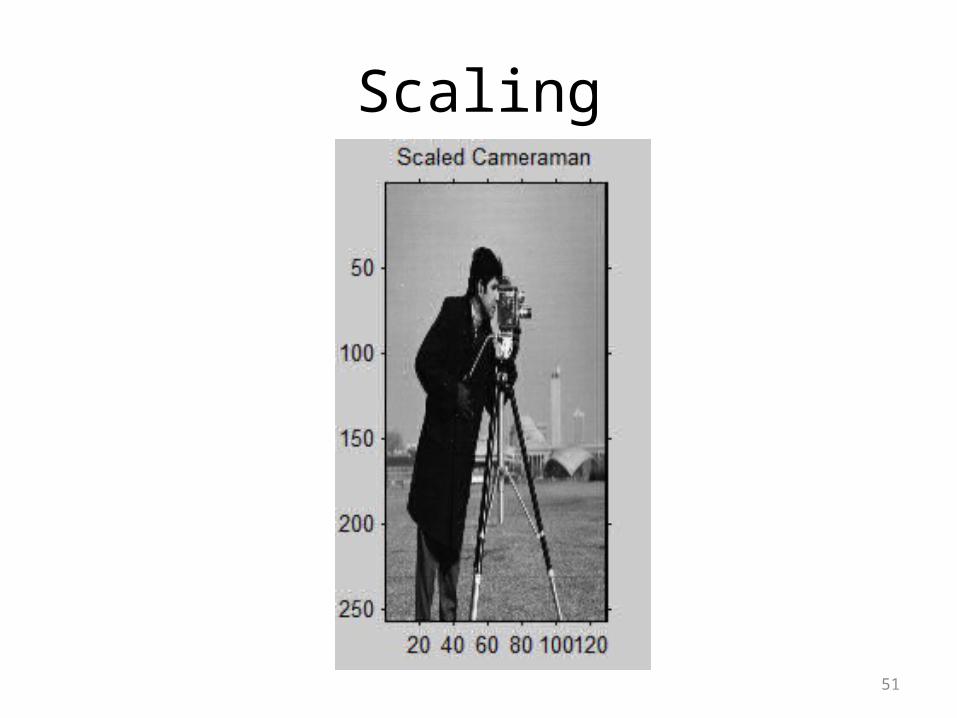
Scaling
51

Matlab for Rotationtheta = pi/6;Trot = [cos(theta),sin(theta),0; -sin(theta),cos(theta),0; 0, 0, 1];tRot = maketform('affine',Trot); ImRot = imtransform(Im, tRot);figure, imshow(ImRot), axis on;title('Rotated Checkerboard'); Textbook
Page 29052

Matlab for Rotation
53
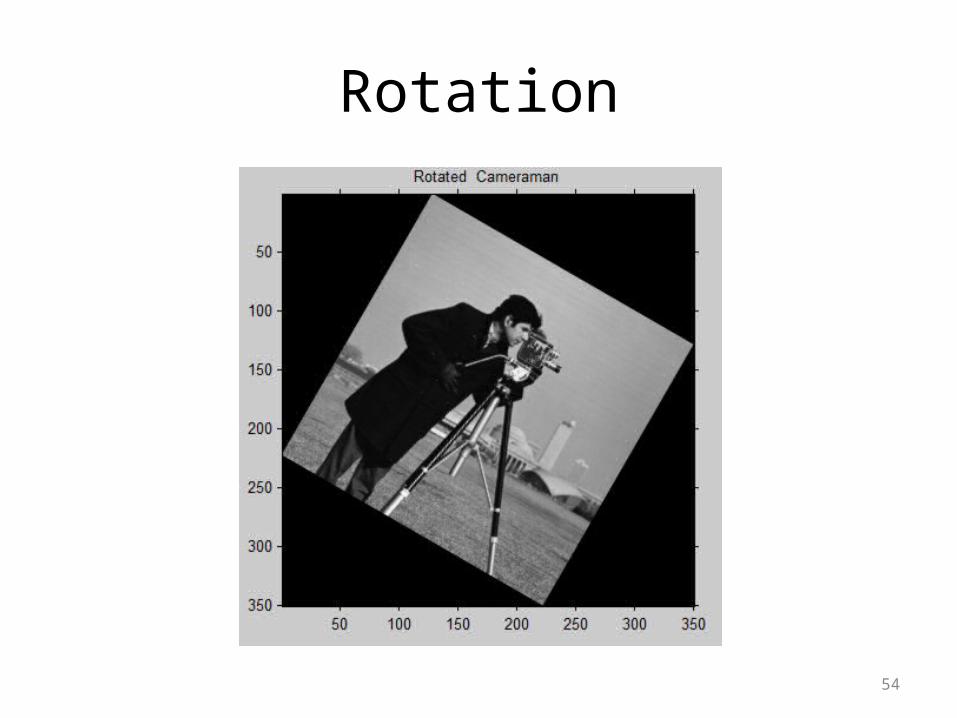
Rotation
54
Matlab for Shearing
shx=2;shy=3; Tshear=[1 shx 0;
shy 1 0; 0 0 1];
tShear=maketform('affine',Tshear);ImShear=imtransform(Im,tShear);figure, imshow(ImShear),axis on;title('Sheared Checkerboard');
55
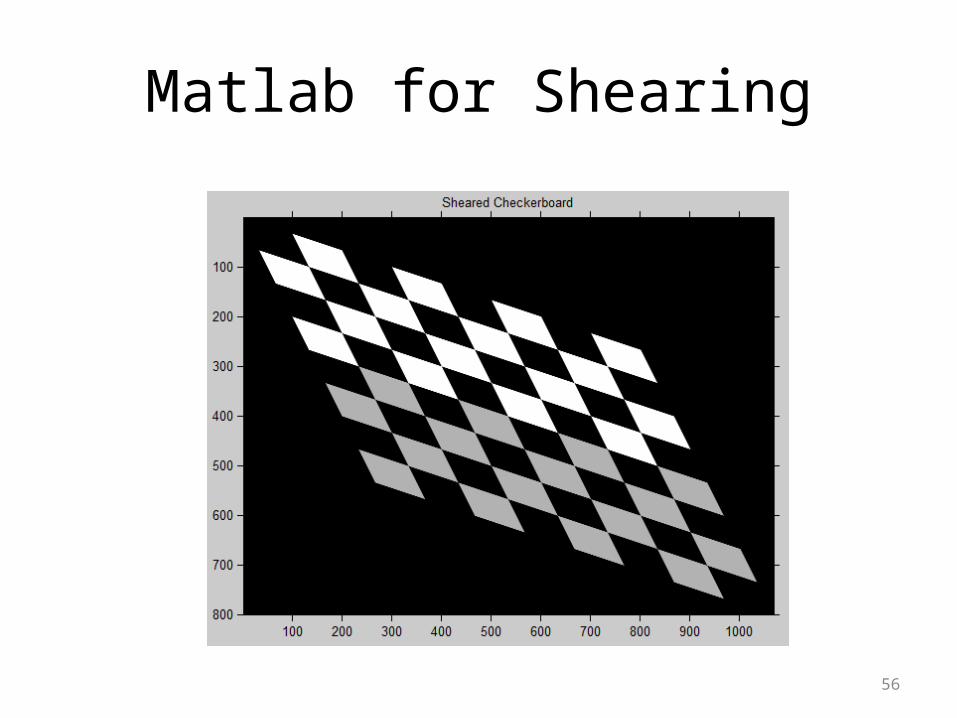
Matlab for Shearing
56

Matlab for Shearing
57

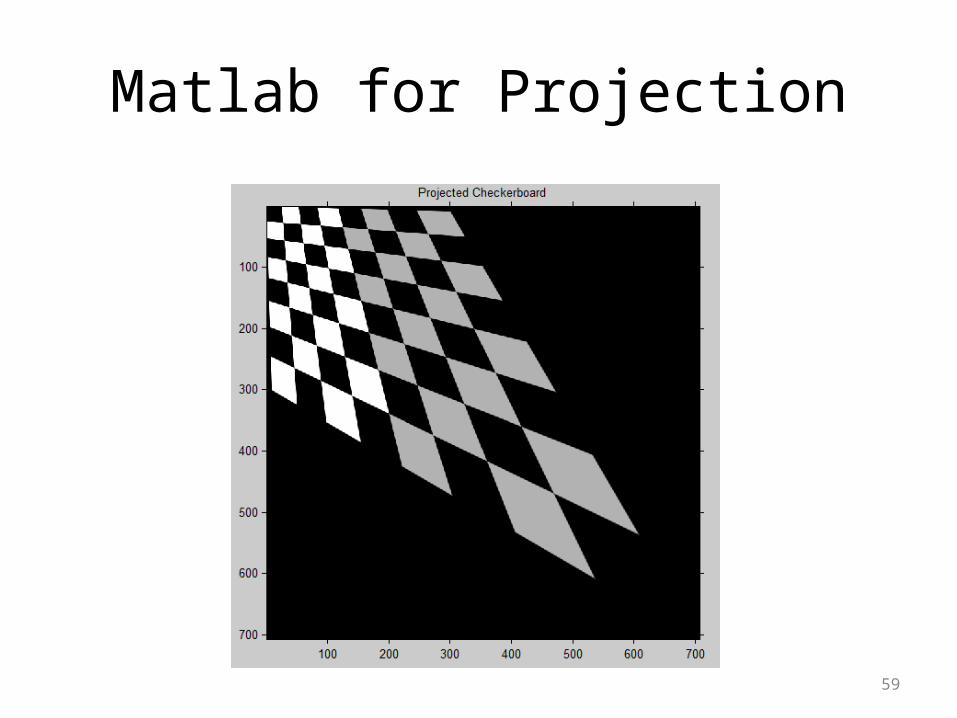
Matlab for Projection
Tpoj=[0.4788, 0.0135, -0.0009; 0.0135, 0.4788, -0.0009; 0.5059, 0.5059, 1];
tPoj=maketform('projective',Tpoj);ImPoj=imtransform(Im,ImPoj);figure, imshow(ImPoj), axis on;title('Projected Checkerboard');
Textbook Page 291 58
Matlab for Projection
59
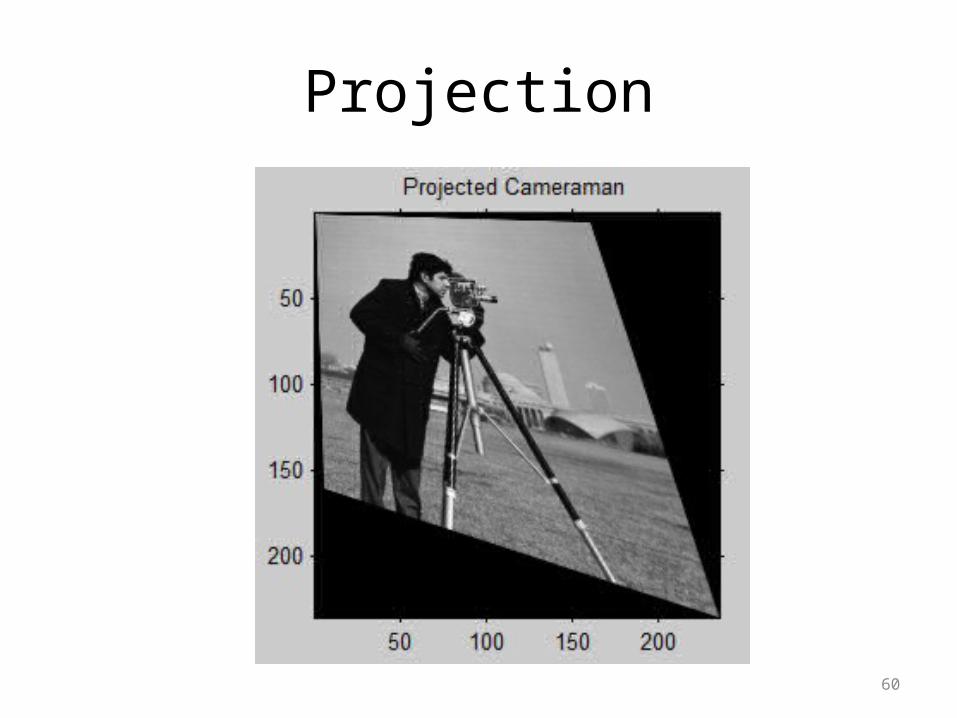
Projection
60

Affine Transformation Example
Im = imread('cameraman.tif'); T = maketform('affine',[.5 0 0; .5 2 0; 0 0 1]); tformfwd([10 20],T); ImTrans= imtransform(Im,T); figure, imshow(Im), axis on; figure, imshow(ImTrans), axis on;
61

Result
62
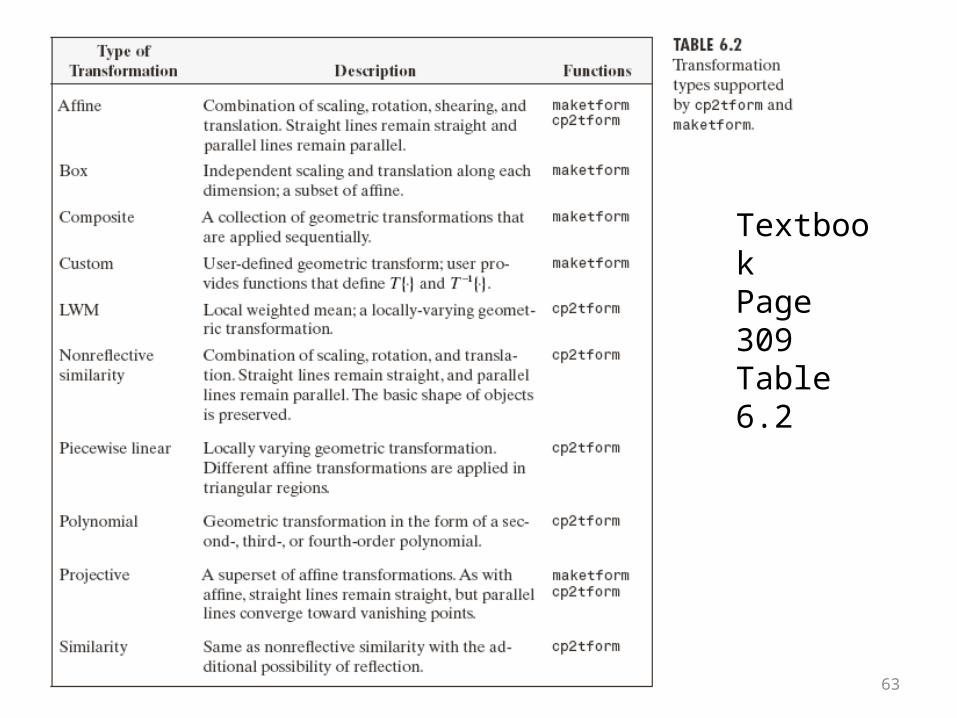
Textbook Page 309Table 6.2
63

Textbook Page 316Table 6.3
64
Take home assignments• Know– Concepts of Affine/ Projective transformations– Transformation Matrices
• Practice– Play with different transformation matrices T and
see how they are used in image transformations
• Master– Function maketform and function imtransform– How they are implemented in Matlab
65

Take Home Message
1
*
100
00
00
1
y
x
s
s
y
x
y
x
1
*
100
0cossin
0sincos
1
y
x
y
x
1
*
100
01
01
1
y
x
sh
sh
y
x
y
x
1
*
100
10
01
1
y
x
t
t
y
x
y
x
Translation Scaling
ShearingRotation
66