CS 352: Computer Graphics Chapter 4: Geometric Objects and Transformations

CS 352: Computer Graphics Chapter 4: Geometric Objects and Transformations.
Dec 20, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

CS 352: Computer Graphics
Chapter 4:
Geometric Objects and
Transformations
Sensational Solar System Simulator
Interactive Computer GraphicsChapter 4 - 2
Interactive Computer GraphicsChapter 4 - 3
Perspective How is it that mathematics can model
the (ideal) world so well?
Interactive Computer GraphicsChapter 4 - 4
Overview Scalars and Vectors Coordinates and frames Homogeneous coordinates Rotation, translation, and scaling Concatenating transformations Transformations in Canvas Projections A virtual trackball
Interactive Computer GraphicsChapter 4 - 5
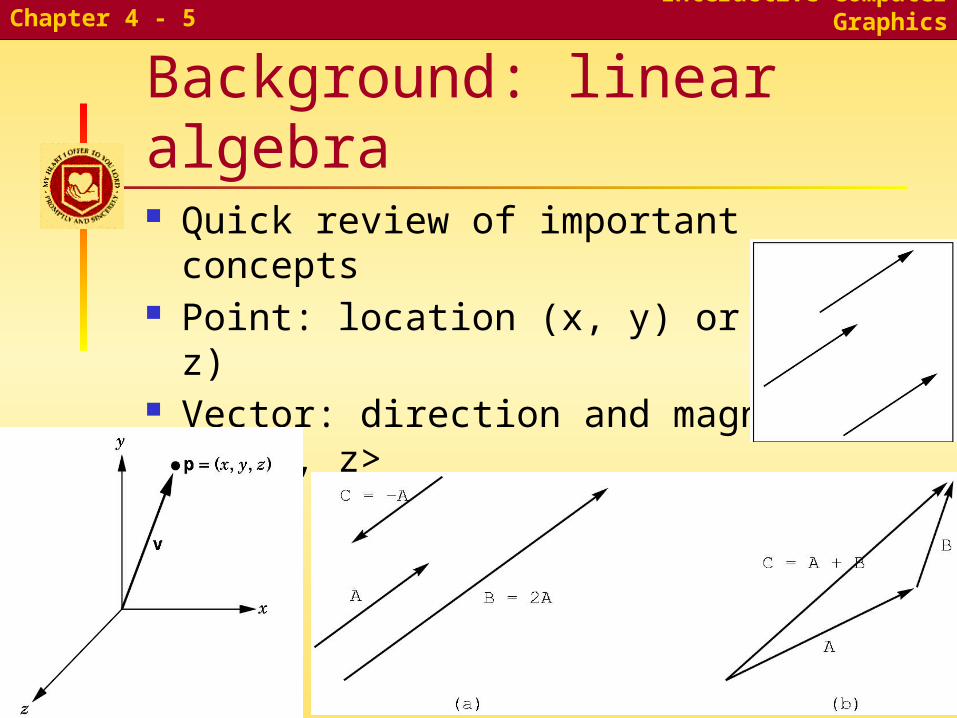
Background: linear algebra Quick review of important concepts Point: location (x, y) or (x, y, z) Vector: direction and magnitude
<x, y, z>
Interactive Computer GraphicsChapter 4 - 6
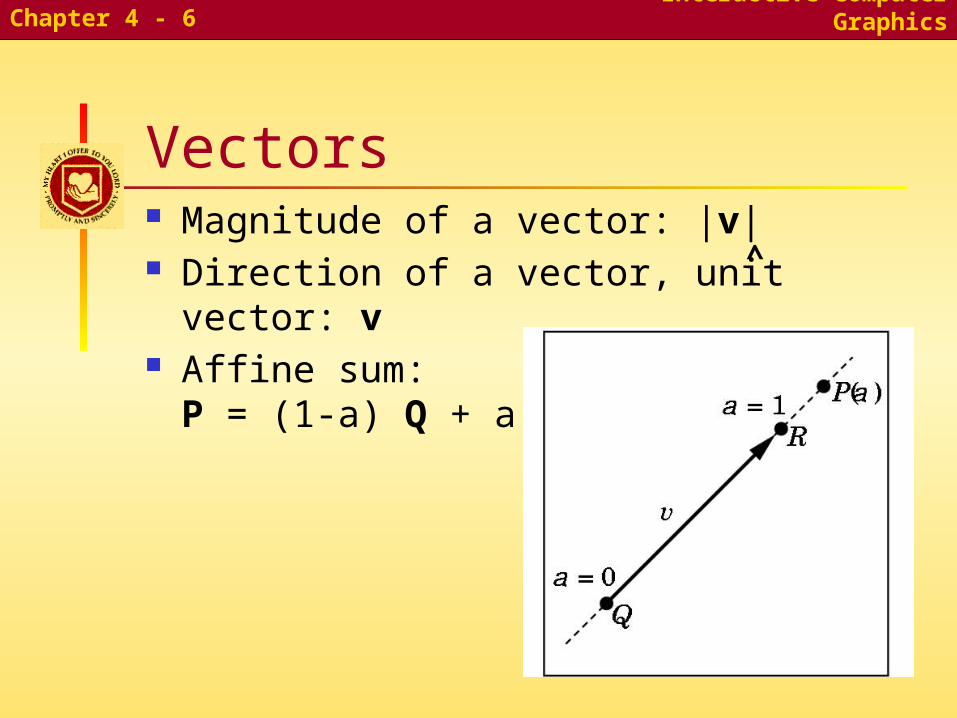
Vectors Magnitude of a vector: |v| Direction of a vector, unit vector: v Affine sum:
P = (1-a) Q + a R
^

Interactive Computer GraphicsChapter 4 - 7
Dot Product Def: u • v = ux vx + uy vy+ uz vz
u • v = |u| |v| cos θ Uses:
Angle between two vectors? Are two vectors perpendicular? Do two vectors form
acute or obtuse angle?
Is a face visible?(backface culling)
Interactive Computer GraphicsChapter 4 - 8
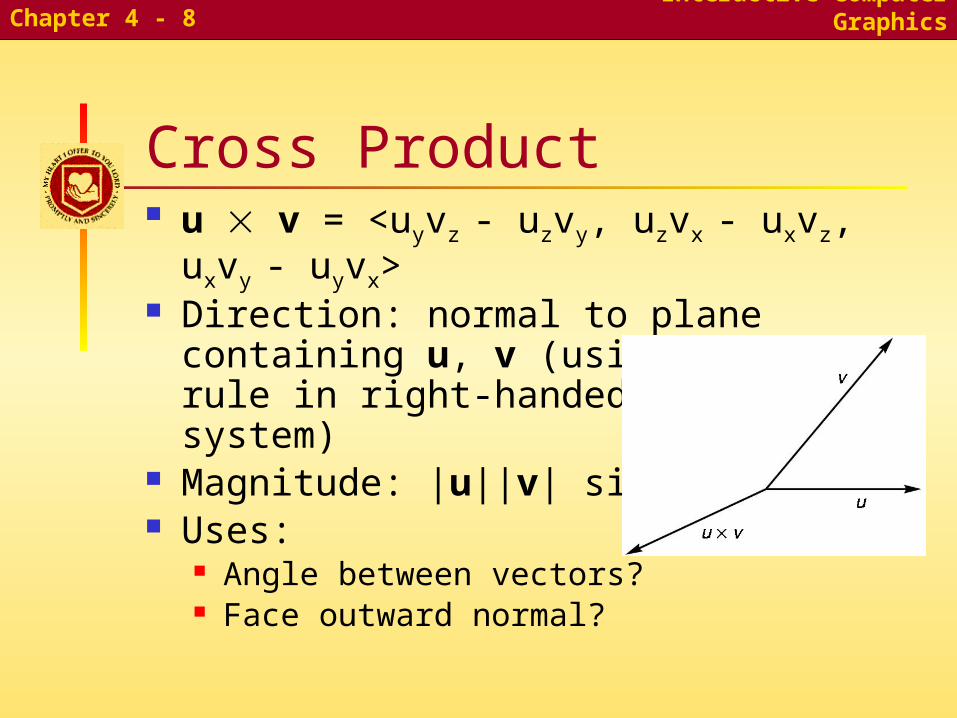
Cross Product u v = <uyvz - uzvy, uzvx - uxvz, uxvy -
uyvx> Direction: normal to plane containing u,
v (using right-hand rule in right-handed coordinate system)
Magnitude: |u||v| sin θ Uses:
Angle between vectors? Face outward normal?
Interactive Computer GraphicsChapter 4 - 9
Face outward normals Why might I need face normals? How to find the outward normal of a
face? Assume that vertices are listed in a
standard order when viewed from the outside -- counter-clockwise
Cross product of the first two edges is outward normal vector
Note that first corner must be convex

Interactive Computer GraphicsChapter 4 - 10
Ouch! How can I tell if I have run into a wall? Walls, motion segments, intersection
tests How to tell if two line segments (p1, p2)
and (p3, p4) intersect? Looking from p1 to p2, check that p3 and
p4 are on opposite sides Looking from p3 to p4, check that p1 and
p2 are on opposite sides

How do you get the earth to go around the sun?
How do you get the moon to do that fancy motion?
Interactive Computer GraphicsChapter 4 - 11
Sensational Solar System Simulator
Interactive Computer GraphicsChapter 4 - 12
Coordinate systems and frames A graphics program uses many
coordinate systems, e.g. model, world, screen
Frame: origin + basis vectors (axes)
Need to transform between frames
Interactive Computer GraphicsChapter 4 - 13
Transformations Changes in coordinate systems usually
involve Translation Rotation Scale
3-D Rotation and scale can be represented as 3x3 matrices, but not translation
We're also interested in a 3-D to 2-D projection
We use 3-D "homogeneous coordinates" with four components per point
For 2-D, can use homogeneous coords with three components

Interactive Computer GraphicsChapter 4 - 14
Homogeneous Coordinates A point: (x, y, z, w) where w is a "scale
factor" Converting a 3D point to homogeneous
coordinates: (x, y, z) (x, y, z, 1) Transforming back to 3-space: divide by w
(x, y, z, w) (x/w, y/w, z/w) (3, 2, 1): same as
(3, 2, 1, 1) = (6, 4, 2, 2) = (1.5, 1, 0.5, 0.5) Where is the point (3, 2, 1, 0)?
Point at infinity or "pure direction." Used for vectors (vs. points)
Interactive Computer GraphicsChapter 4 - 15
Homogeneous transformations Most important reason for using
homogeneous coordinates: All affine transformations (line-preserving:
translation, rotation, scale, perspective, skew) can be represented as a matrix multiplication
You can concatenate several such transformations by multiplying the matrices together. Just as fast as a single transform!
Modern graphics cards implement homogeneous transformations in hardware (or used to)

Interactive Computer GraphicsChapter 4 - 16
Translation

Interactive Computer GraphicsChapter 4 - 17
Scaling
Note that the scaling fixed point is the origin
Interactive Computer GraphicsChapter 4 - 18
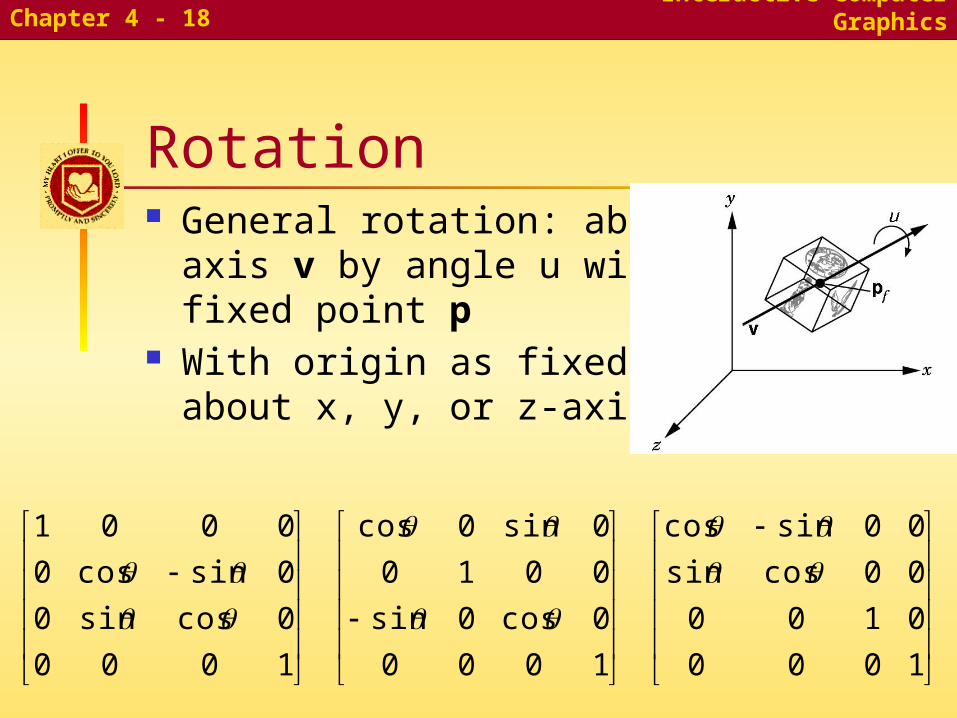
Rotation General rotation: about an
axis v by angle u with fixed point p
With origin as fixed point, about x, y, or z-axis:
1000
0cossin0
0sincos0
0001
1000
0cos0sin
0010
0sin0cos
1000
0100
00cossin
00sincos

Interactive Computer GraphicsChapter 4 - 19
Rotating about another point How can I rotate around another fixed
point, e.g. [1, 2, 3]? Translate [1, 2, 3] -> 0, 0, 0 (T) Rotate (R) Translate back (T-1) T-1 R T P = P'

Interactive Computer GraphicsChapter 4 - 20
Rotating about another axis How can I rotate about an arbitrary axis?
Can combine rotationsabout z, y, and x:Rx Ry Rz P = P'
Note that ordermatters and anglescan be hard to find
Concatenating transformations Many transformations can be
concatenated into one matrix for efficiency
Canvas: transformations concatenate
Set the transformation to the identity to reset
Or, push/pop matrices (save/restore state)
Interactive Computer GraphicsChapter 4 - 21

Interactive Computer GraphicsChapter 4 - 22
Example: Orbiting the Sun How to make the earth move 5
degrees? Set appropriate modeling matrix before drawing
image Rotate 5 degrees, then translate What Canvas code to use?
How to animate a continuous rotation? Every few ms, modify modeling matrix and redisplay Reset to original and concatenate rotation and
translation
How to make it spin on its own axis too?
rotate, translate, rotate, draw
Interactive Computer GraphicsChapter 4 - 23
Earth & Moonsolar.cx.save();solar.cx.rotate(timefrac/365); // earth around the sunsolar.cx.translate(250,0);solar.cx.save();solar.cx.rotate(timefrac);solar.cx.drawImage(earth, -earth.width/2, –earth.height/2);
solar.cx.restore();
solar.cx.save(); // moon around earthsolar.cx.rotate(timefrac/28);solar.cx.translate(56, 0);solar.cx.drawImage(moon, -moon.width/2, -moon.height/2);solar.cx.restore();

Moon River, wider than a mile… How to make the moon follow that
crazy path? Try it…
Interactive Computer GraphicsChapter 4 - 24
Write a program to animate something that has moving parts that have moving parts
Use both translation and rotation It should save/restore state
Examples: Walking robot Person pedaling a unicycle Person waving in a moving convertible Spirograph
Interactive Computer GraphicsChapter 4 - 25Project 4:
Wonderfully Wiggly Working Widget
Accelerometer events Many browsers now support the
DeviceOrientation API (W3C draft) [demo]
window.ondevicemotion = function(event) { var accelerationX = event.accelerationIncludingGravity.x var accelerationY = event.accelerationIncludingGravity.y var accelerationZ = event.accelerationIncludingGravity.z}
Interactive Computer GraphicsChapter 4 - 26
3D: Polgyons and stuff
Interactive Computer GraphicsChapter 4 - 27
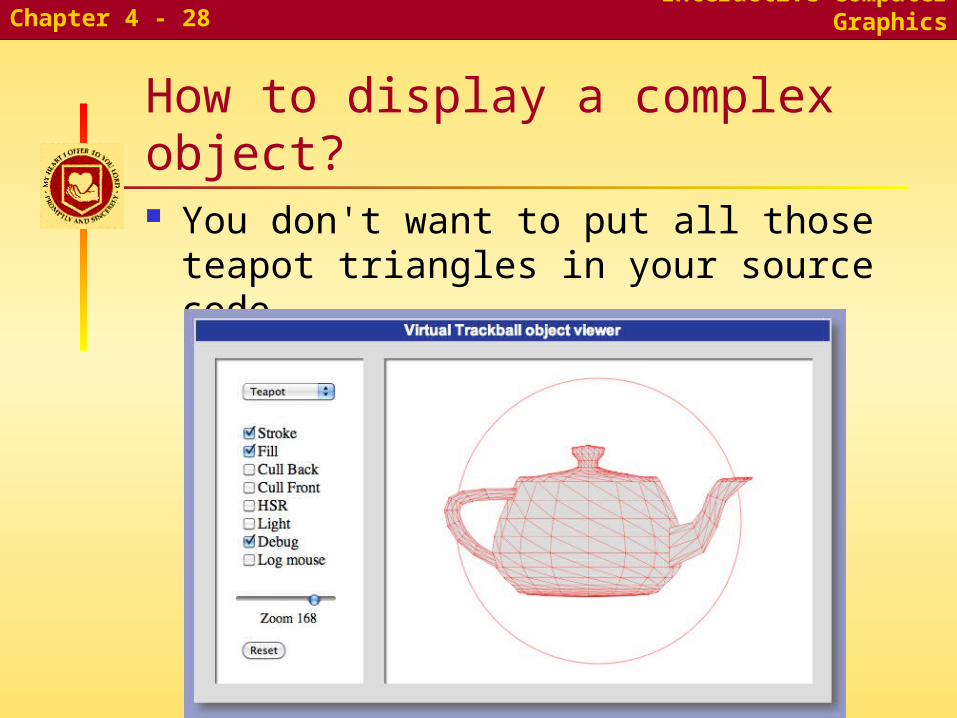
How to display a complex object? You don't want to put all those teapot
triangles in your source code…
Interactive Computer GraphicsChapter 4 - 28
Interactive Computer GraphicsChapter 4 - 29
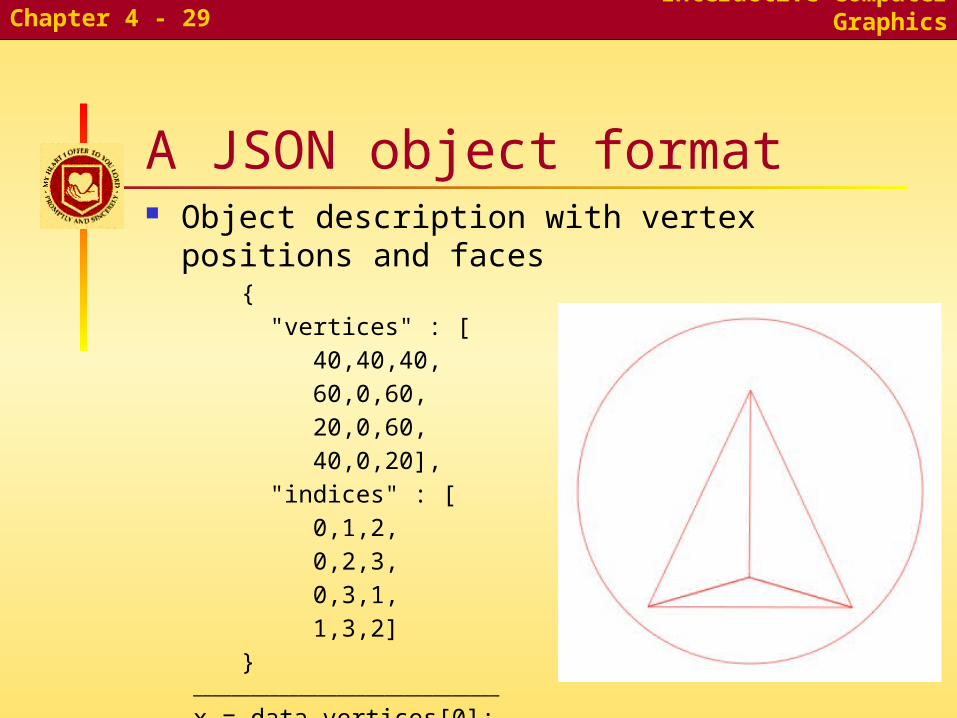
A JSON object format Object description with vertex positions and
faces{ "vertices" : [
40,40,40, 60,0,60, 20,0,60, 40,0,20],
"indices" : [0,1,2, 0,2,3, 0,3,1, 1,3,2]
} ________________________________
x = data.vertices[0];
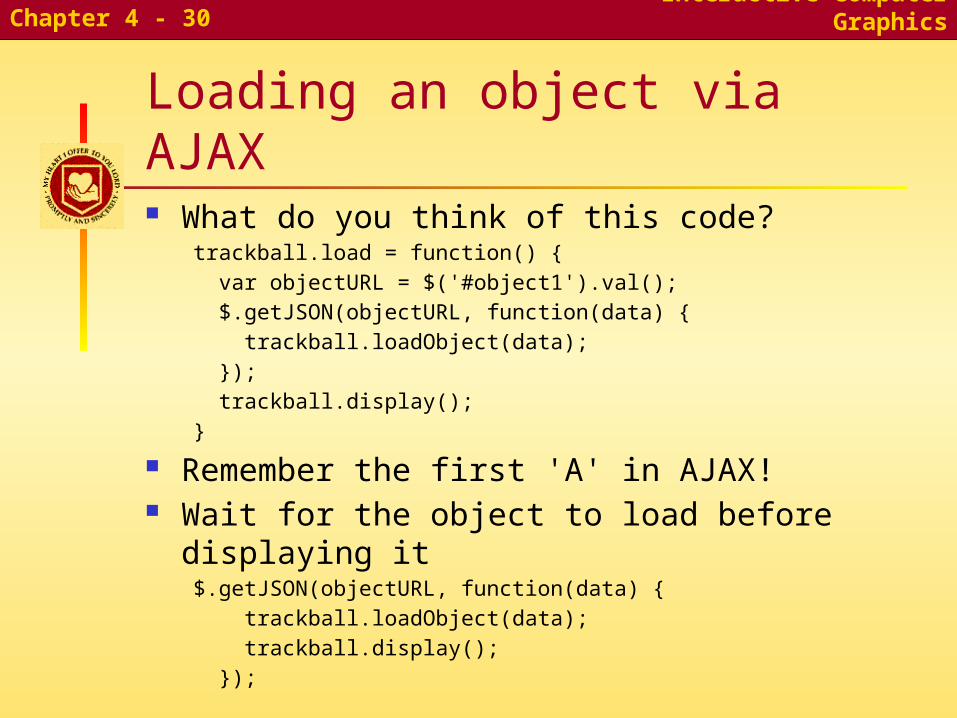
Loading an object via AJAX What do you think of this code?
trackball.load = function() { var objectURL = $('#object1').val(); $.getJSON(objectURL, function(data) { trackball.loadObject(data); }); trackball.display();}
Remember the first 'A' in AJAX! Wait for the object to load before displaying it
$.getJSON(objectURL, function(data) { trackball.loadObject(data); trackball.display(); });
Interactive Computer GraphicsChapter 4 - 30
Question How to move object into the sphere
centered at the origin with radius 1?
Interactive Computer GraphicsChapter 4 - 31

Interactive Computer GraphicsChapter 4 - 32
Point normalization Find min and max values of X, Y, Z Find center point, Xc, Yc, Zc Translate center to origin (T) Scale (S) P' = S T P Modeling matrix M = S T
Note apparent reversed order of matrices
Question How to draw a 3-D object on a 2-D
screen?
Interactive Computer GraphicsChapter 4 - 33
Interactive Computer GraphicsChapter 4 - 34
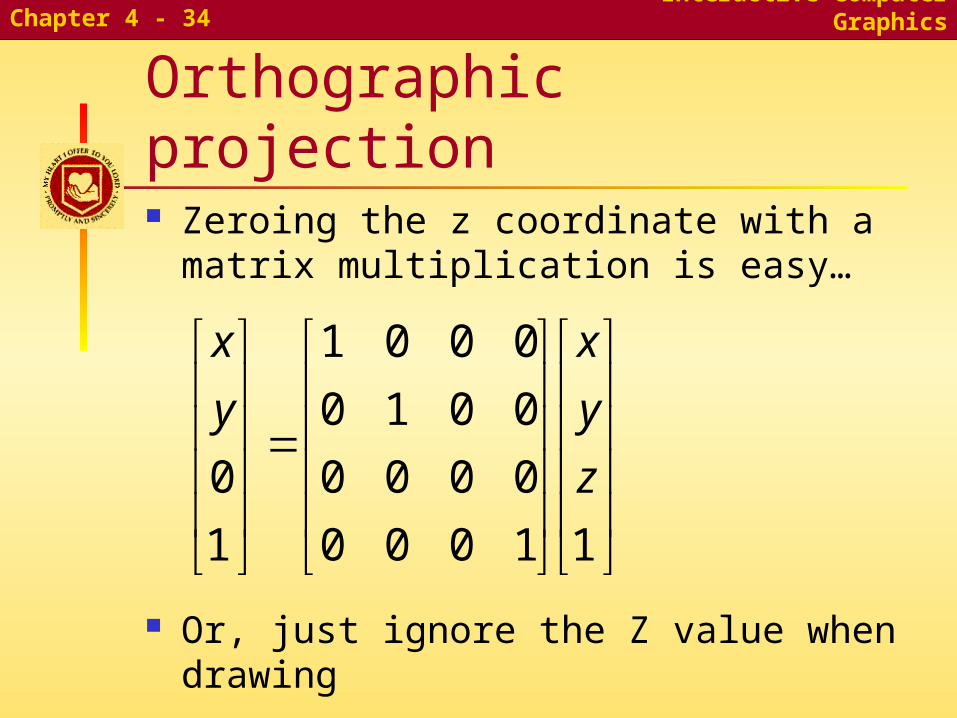
Orthographic projection Zeroing the z coordinate with a matrix
multiplication is easy…
Or, just ignore the Z value when drawing
11000
0000
0010
0001
1
0 z
y
x
y
x

Interactive Computer GraphicsChapter 4 - 35
Perspective projection Can also be done with a single matrix multiply
using homogeneous coordinates Uses the divide-by-w step We'll see in next chapter
Interactive Computer GraphicsChapter 4 - 36
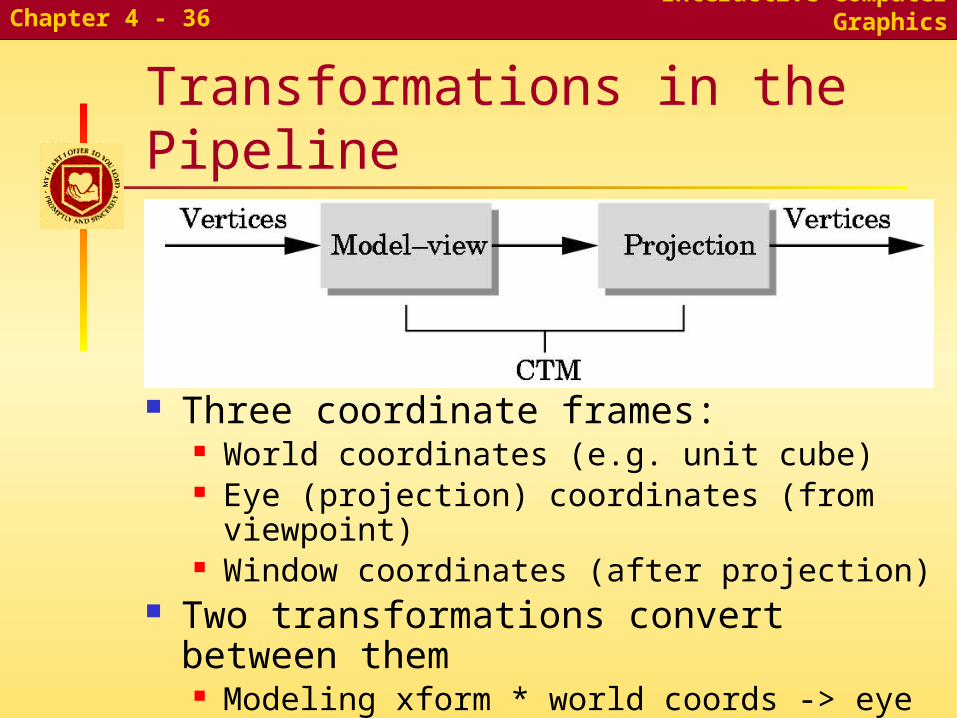
Transformations in the Pipeline
Three coordinate frames: World coordinates (e.g. unit cube) Eye (projection) coordinates (from
viewpoint) Window coordinates (after projection)
Two transformations convert between them Modeling xform * world coords -> eye
coords Projection xform * eye coords -> window
coords
Interactive Computer GraphicsChapter 4 - 37
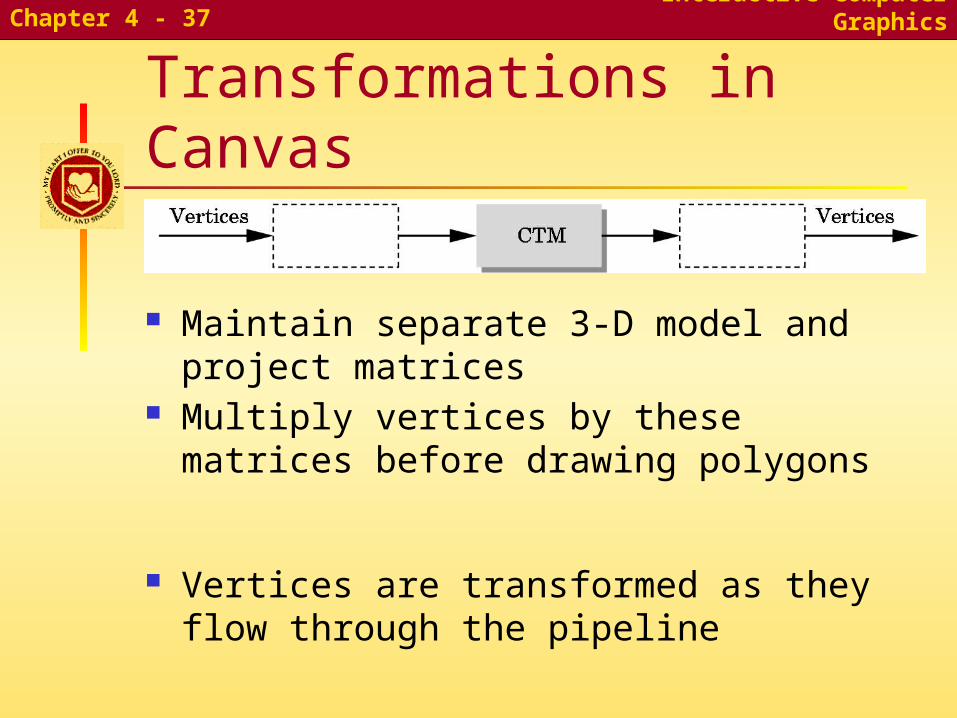
Transformations in Canvas
Maintain separate 3-D model and project matrices
Multiply vertices by these matrices before drawing polygons
Vertices are transformed as they flow through the pipeline
Interactive Computer GraphicsChapter 4 - 38
Transformations 2 If p is a vertex, pipeline produces Cp
(post-multiplication only) Can concatenate transforms in CTM:
C IC T(4, 5, 6)C R(45, 1, 2, 3)C T(-4, -5, -6)[C = T-1 S T]
Note that last transform defined is first applied

Interactive Computer GraphicsChapter 4 - 39
Putting it all together Load vertices and faces of object.
Normalize: put them in (-1, 1, -1, 1, -1, 1) cube
Put primitives into a display list Set up viewing transform to display that
cube Set modeling transform to identity To spin the object, every 1/60 second
do: Add 5 degrees to current rotation amount Set up modeling transform to rotate by
current amount

Interactive Computer GraphicsChapter 4 - 40
Virtual Trackball Imagine a trackball embedded in the
screen If I click on the screen, what point on
the trackball am I touching?

Interactive Computer GraphicsChapter 4 - 41
Trackball Rotation Axis If I move the mouse from p1 to p2, what
rotation does that correspond to?

Interactive Computer GraphicsChapter 4 - 42
Virtual Trackball Rotations Rotation about the axis n = p1 x p2
Fixed point: if you use the [-1, 1] cube, it is the origin
Angle of rotation: use cross product|u v| = |u||v| sin θ(or use Sylvester's built-in function)
n = p1.cross(p2); theta = p1.angleFrom(p2); modelMat = oldModelMat.multiply(1); // restore old
matrix modelMat = Matrix.Rotation(theta,n).multiply(modelMat);

Interactive Computer GraphicsChapter 2 - 43
Hidden surface removal What's wrong with this picture?
How can weprevent hiddensurfaces frombeing displayed?
Interactive Computer GraphicsChapter 2 - 44
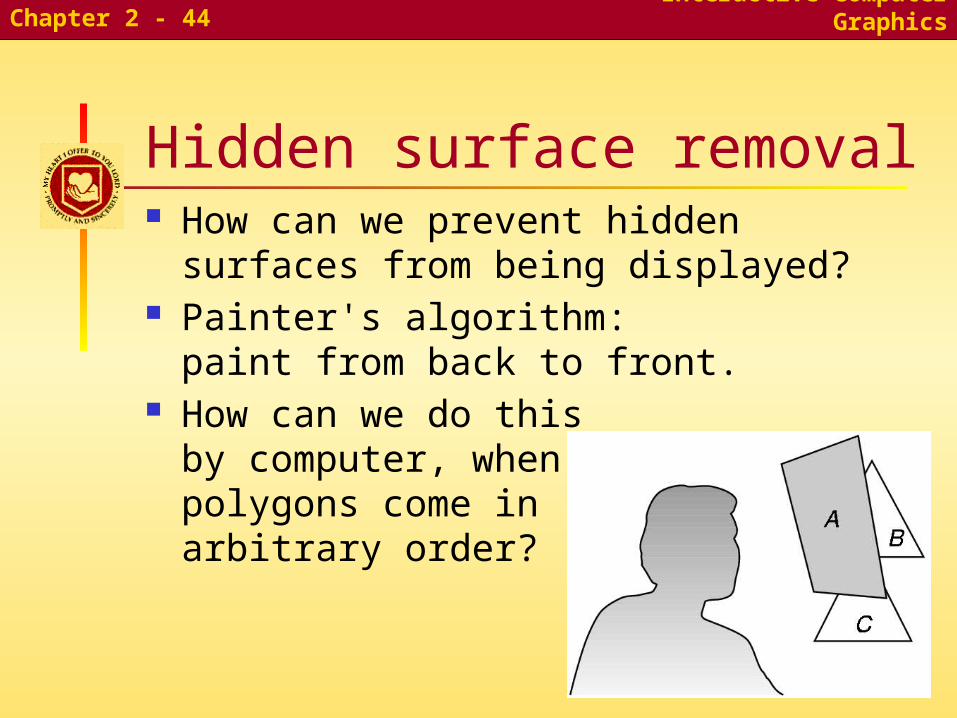
Hidden surface removal How can we prevent hidden surfaces
from being displayed? Painter's algorithm:
paint from back to front. How can we do this
by computer, whenpolygons come in arbitrary order?

Poor-man's HSR Transform points for current viewpoint Sort back to front by the face's average
Z Does this always work?
Interactive Computer GraphicsChapter 4 - 45

Interactive Computer GraphicsChapter 2 - 46
HSR Example Which polygon should be drawn first?
We'll study other algorithms later
A better HSR algorithm Depth buffer algorithm
Interactive Computer GraphicsChapter 4 - 47

Interactive Computer GraphicsChapter 4 - 48
Data structures needed An array of vertices, oldVertices An array of normalized vertices,
vertices[n][3], in the [-1, 1] cube An array for vertices in world
coordinates An array of faces containing vertex
indexes, int faces[n][max_sides]. Use faces[n][0] to store the number of sides. Set max_sides to 12 or so.

Interactive Computer GraphicsChapter 4 - 49
Virtual Trackball Program Stage 1
Read in, normalize object Display with rotation, HSR
Stage 2 Virtual trackball rotations Perspective Lighting/shading
Related Documents