Efecto de la profundidad del daño por grieta y de la esbeltez de una viga en su dinámica, análisis numérico y experimental Rafael García-Illescas 1,2 , Julio C. Gomez-Mancilla 1 , Luigi Bregant 3 1 Rotordynamic and Vibrations Laboratory, Instituto Politécnico Nacional, D.F. Mexico [email protected] , [email protected] 2 Turbomachinery Department, Instituto de Investigaciones Eléctricas, Cuernavaca Mor. Mexico 3 Dipartimento di Ingegneria e Architettura, Università degli Studi di Trieste, Italy [email protected] 7º Congreso Internacional de Ingeniería Electromecánica y de Sistemas, CIIES 2014

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Efecto de la profundidad del daño por grieta y de la esbeltez
de una viga en su dinámica, análisis numérico y experimental
Rafael García-Illescas1,2, Julio C. Gomez-Mancilla1, Luigi Bregant3
1Rotordynamic and Vibrations Laboratory, Instituto Politécnico Nacional, D.F. Mexico [email protected], [email protected]
2Turbomachinery Department, Instituto de Investigaciones Eléctricas, Cuernavaca Mor. Mexico
3Dipartimento di Ingegneria e Architettura, Università degli Studi di Trieste, Italy [email protected]
7º Congreso Internacional de Ingeniería Electromecánica y de Sistemas, CIIES 2014
Resumen•La presencia de una grieta en un rotor/estructura produce un cambio de rigidez.
•Frecuencias naturales y modos de vibración para diferentes profundidades de grieta y diferente esbeltez de viga: MEF vs. experimentos.
•2 condiciones de frontera: -simplemente apoyada y -libre-libre.•Viga Timoshenko beams con longitud equivalente para modelar fisura.
•Ejes con muesca proveen el límite superior de reducción de la frecuencia.
•División de frecuencias para cada modo son obtenidas cuando hay grieta.
•Energía vibracional acoplada de la división de frecuencias alcanza un máximo cuando la excitación es ortogonal a la grieta.
Introducción•Los rotores con fisuras han sido estudiados desde los 1970’s. Investigadores y estudios son numerosos para ser mencionados.
•En el presente estudio, valores teóricos y numéricos de los primeros modos de vibración de vigas simples con fisura son obtenidos. Análisis numérico con MEF y pruebas de laboratorio son realizados.
Modelación de la Grieta•Si MEF: -elementos sólidos –elementos vigas.•Sólidos = mayor precisión que vigas, pero elevado consumo de recursos computacionales, por tanto: vigas
•Otros enfoques:•Soluciones cerradas (para configuraciones simples)•Ecuaciones diferenciales•Método energético.
•MEF: normalmente la mejor solución para estructuras complejas:•Diversas condiciones de soporte•Diferentes secciones transversales•Multiples masas/discos
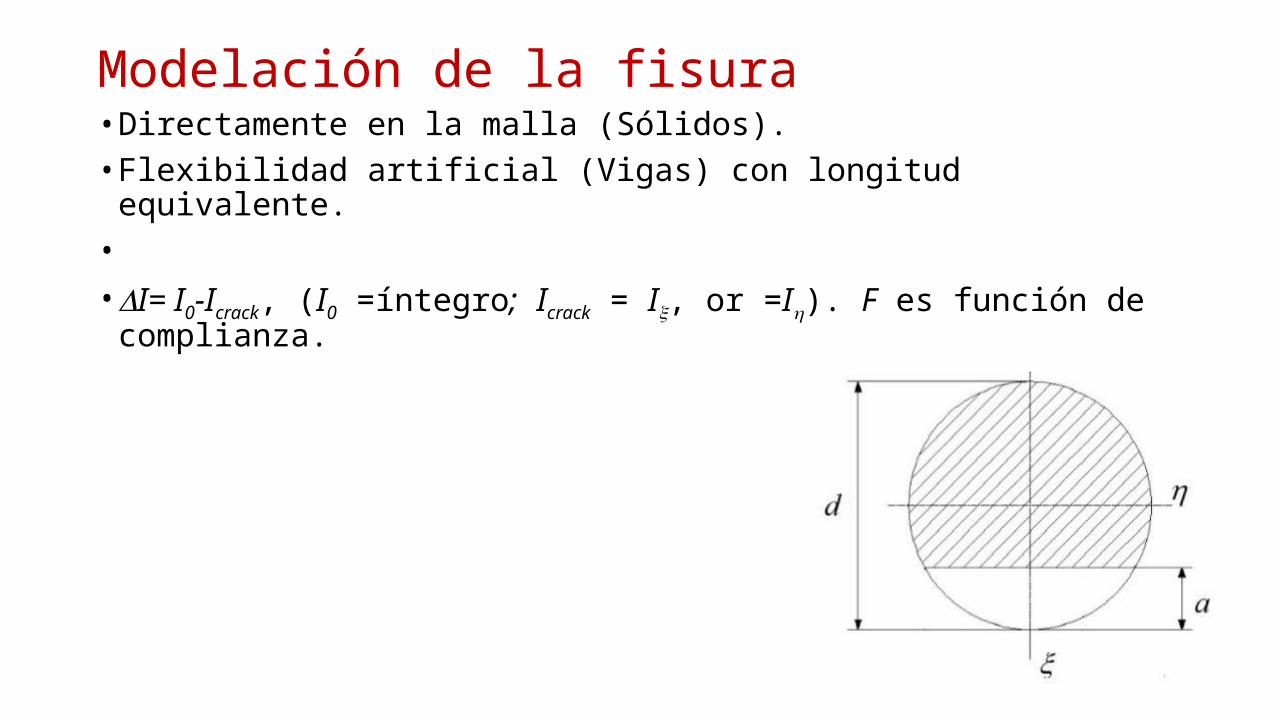
Modelación de la fisura•Directamente en la malla (Sólidos).•Flexibilidad artificial (Vigas) con longitud equivalente.
• •DI= I0-Icrack, (I0 =íntegro; Icrack = I, or =I). F es función de complianza.
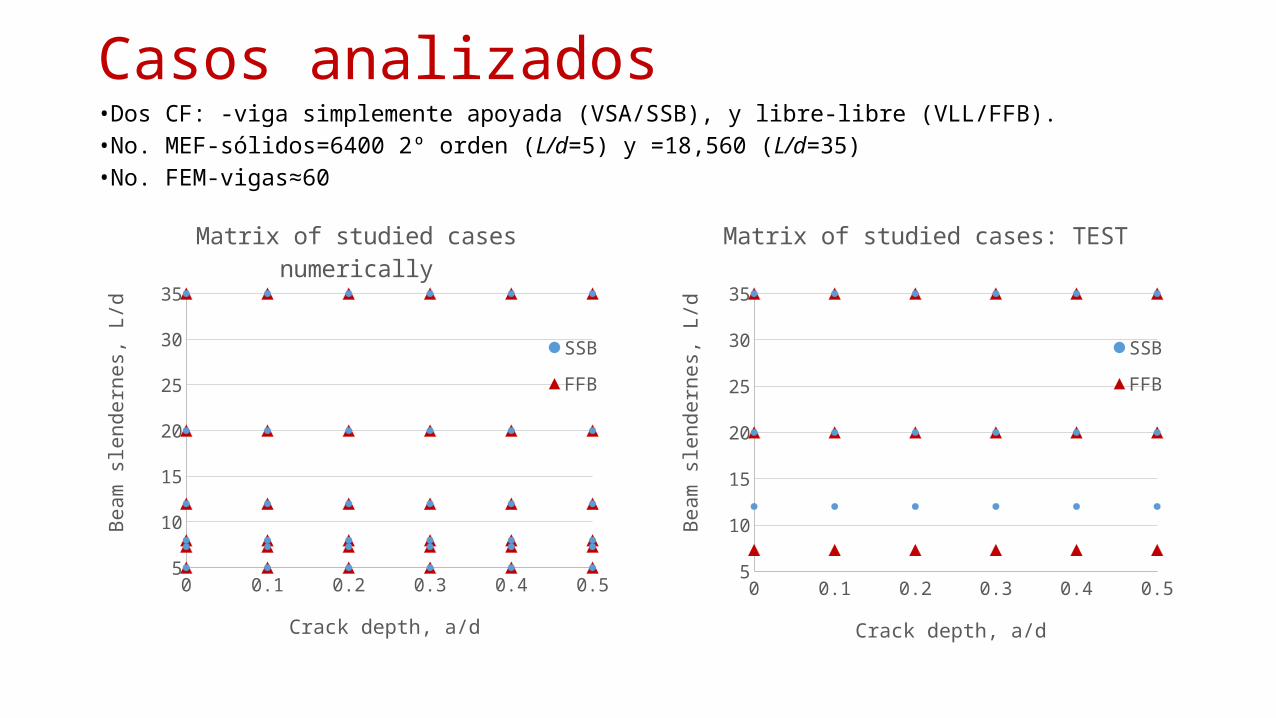
Casos analizados•Dos CF: -viga simplemente apoyada (VSA/SSB), y libre-libre (VLL/FFB).•No. MEF-sólidos=6400 2º orden (L/d=5) y =18,560 (L/d=35)•No. FEM-vigas≈60
0 0.1 0.2 0.3 0.4 0.55
10
15
20
25
30
35
Matrix of studied cases numerically
SSBFFB
Crack depth, a/d
Beam
sle
nder
nes,
L/d
0 0.1 0.2 0.3 0.4 0.55
10
15
20
25
30
35
Matrix of studied cases: TEST
SSBFFB
Crack depth, a/d
Beam
sle
nder
nes,
L/d
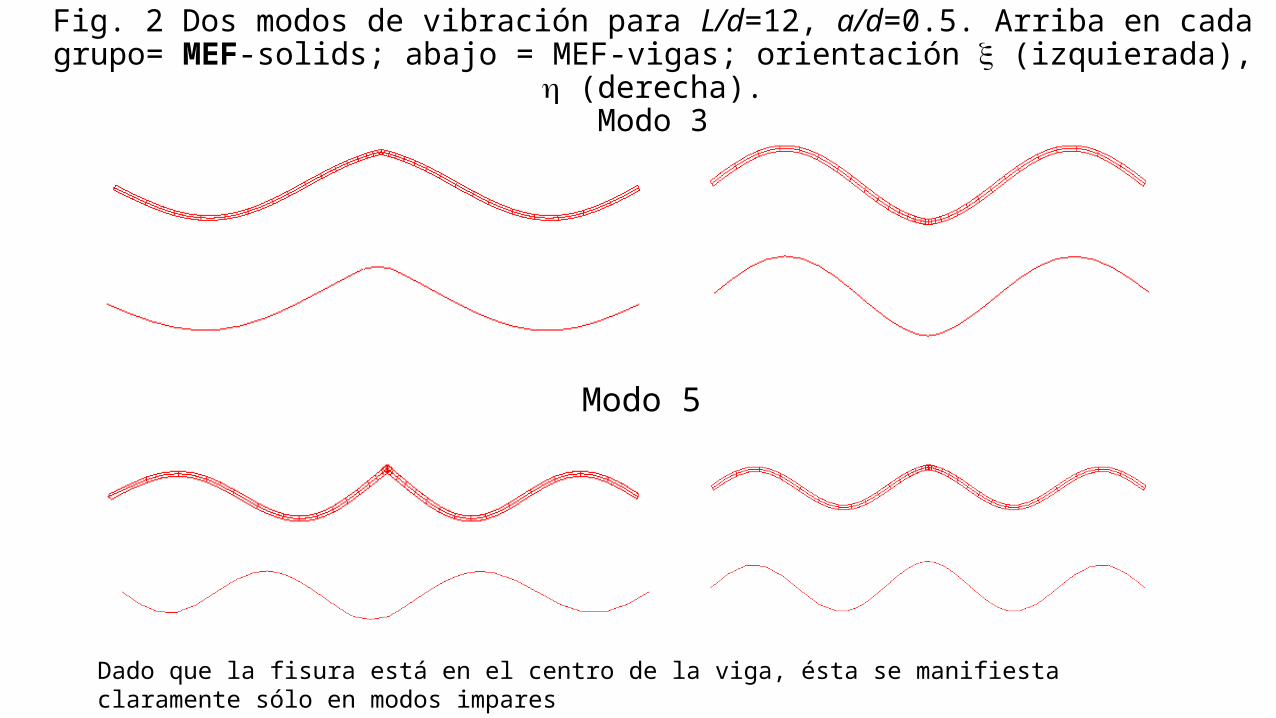
Fig. 2 Dos modos de vibración para L/d=12, a/d=0.5. Arriba en cada grupo= MEF-solids; abajo = MEF-vigas; orientación (izquierada),
(derecha).Modo 3
Modo 5
Dado que la fisura está en el centro de la viga, ésta se manifiesta claramente sólo en modos impares
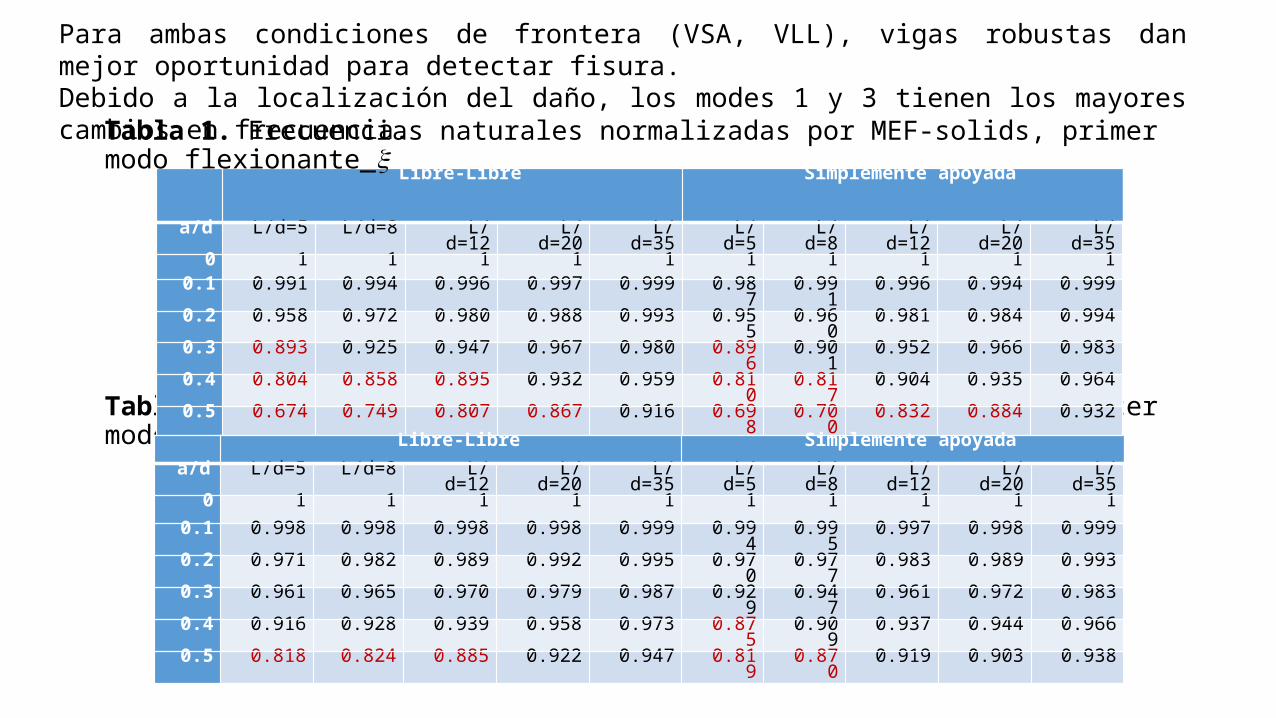
Tabla 2. Frecuencias naturales normalizadas por MEF-solids, tercer modo flexionante_
Libre-Libre Simplemente apoyada
a/d L/d=5 L/d=8 L/d=12
L/d=20
L/d=35
L/d=5
L/d=8
L/d=12
L/d=20
L/d=35
0 1 1 1 1 1 1 1 1 1 10.1 0.991 0.994 0.996 0.997 0.999 0.98
70.99
10.996 0.994 0.999
0.2 0.958 0.972 0.980 0.988 0.993 0.955
0.960
0.981 0.984 0.9940.3 0.893 0.925 0.947 0.967 0.980 0.89
60.90
10.952 0.966 0.983
0.4 0.804 0.858 0.895 0.932 0.959 0.810
0.817
0.904 0.935 0.9640.5 0.674 0.749 0.807 0.867 0.916 0.69
80.70
00.832 0.884 0.932
Libre-Libre Simplemente apoyadaa/d L/d=5 L/d=8 L/
d=12L/
d=20L/
d=35L/d=5
L/d=8
L/d=12
L/d=20
L/d=35
0 1 1 1 1 1 1 1 1 1 10.1 0.998 0.998 0.998 0.998 0.999 0.99
40.99
50.997 0.998 0.999
0.2 0.971 0.982 0.989 0.992 0.995 0.970
0.977
0.983 0.989 0.9930.3 0.961 0.965 0.970 0.979 0.987 0.92
90.94
70.961 0.972 0.983
0.4 0.916 0.928 0.939 0.958 0.973 0.875
0.909
0.937 0.944 0.9660.5 0.818 0.824 0.885 0.922 0.947 0.81
90.87
00.919 0.903 0.938
Tabla 1. Frecuencias naturales normalizadas por MEF-solids, primer modo flexionante_
Para ambas condiciones de frontera (VSA, VLL), vigas robustas dan mejor oportunidad para detectar fisura.Debido a la localización del daño, los modes 1 y 3 tienen los mayores cambios en frecuencia.
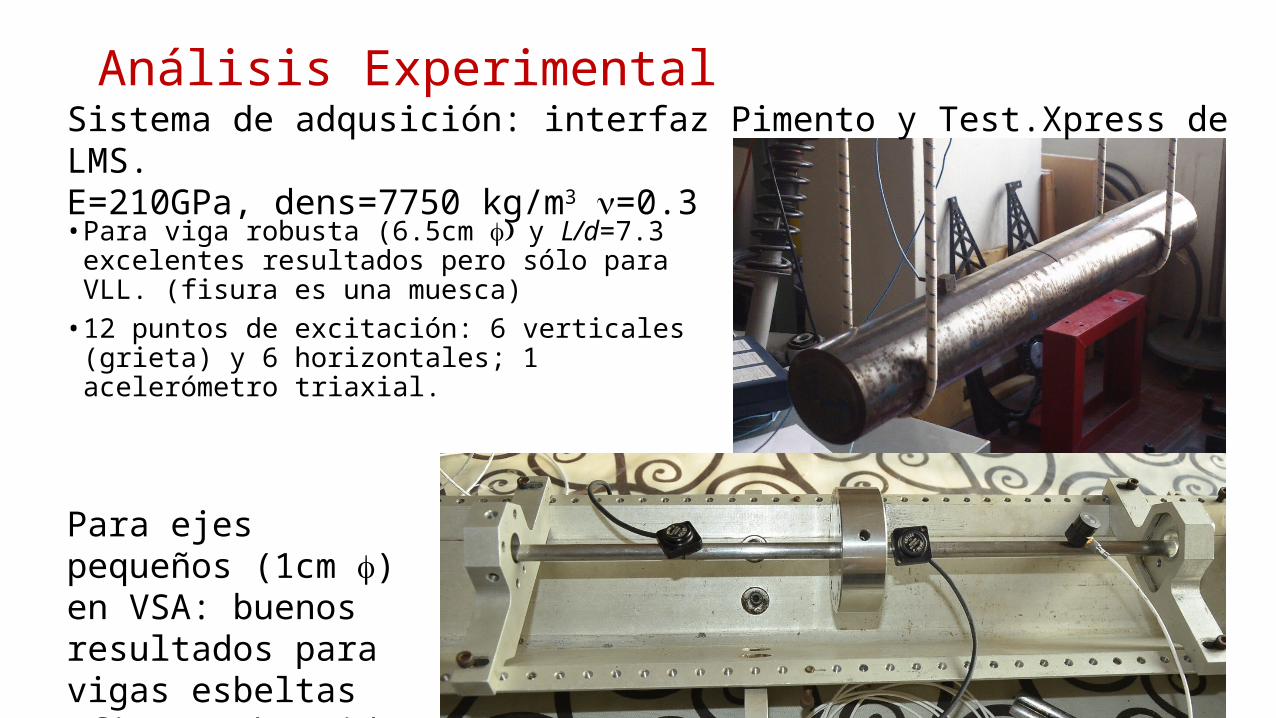
Análisis Experimental
•Para viga robusta (6.5cm f) y L/d=7.3 excelentes resultados pero sólo para VLL. (fisura es una muesca)
•12 puntos de excitación: 6 verticales (grieta) y 6 horizontales; 1 acelerómetro triaxial.
Para ejes pequeños (1cm f) en VSA: buenos resultados para vigas esbeltas (fisura obtenida por electroerosión).
Sistema de adqusición: interfaz Pimento y Test.Xpress de LMS.E=210GPa, dens=7750 kg/m3 n=0.3
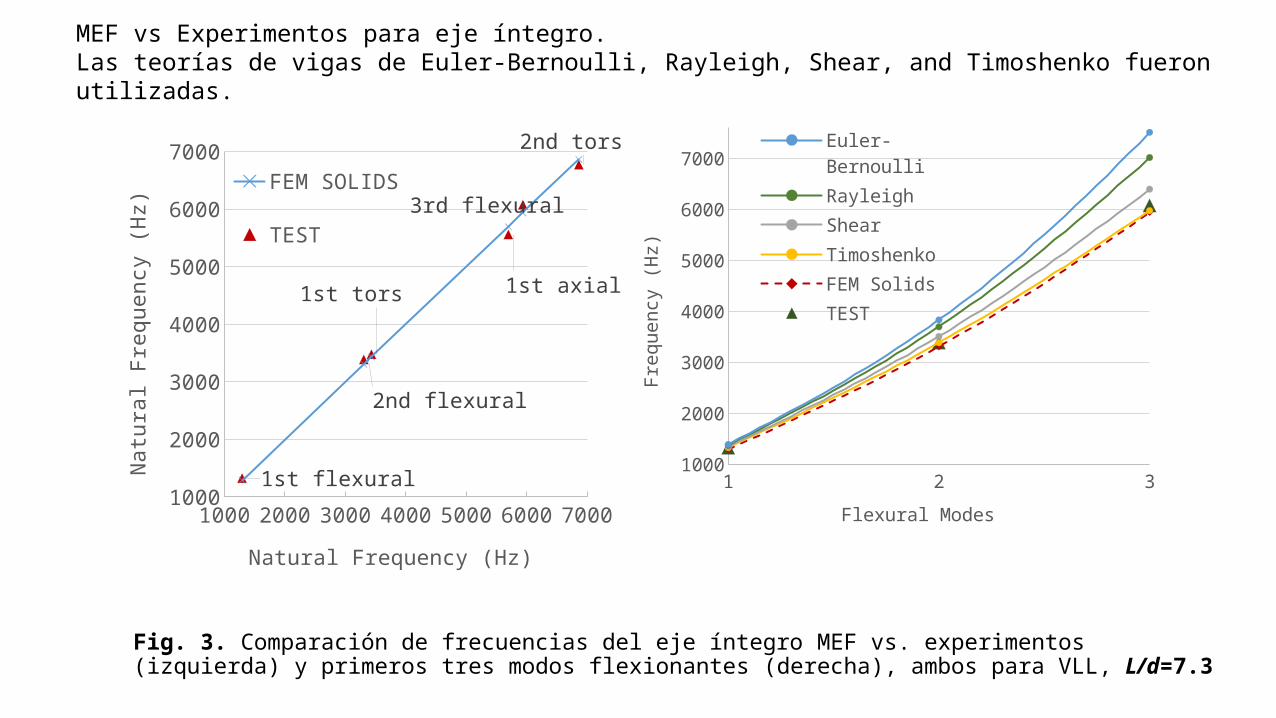
Fig. 3. Comparación de frecuencias del eje íntegro MEF vs. experimentos (izquierda) y primeros tres modos flexionantes (derecha), ambos para VLL, L/d=7.3
1000 2000 3000 4000 5000 6000 70001000
2000
3000
4000
5000
6000
7000
1st flexural
2nd flexural
1st tors 1st axial
3rd flexural
2nd torsFEM SOLIDS
TEST
Natural Frequency (Hz)
Natu
ral
Freq
uenc
y (H
z)
MEF vs Experimentos para eje íntegro.Las teorías de vigas de Euler-Bernoulli, Rayleigh, Shear, and Timoshenko fueron utilizadas.
1 2 31000
2000
3000
4000
5000
6000
7000Euler-BernoulliRayleighShearTimoshenkoFEM SolidsTEST
Flexural Modes
Frequency (Hz)
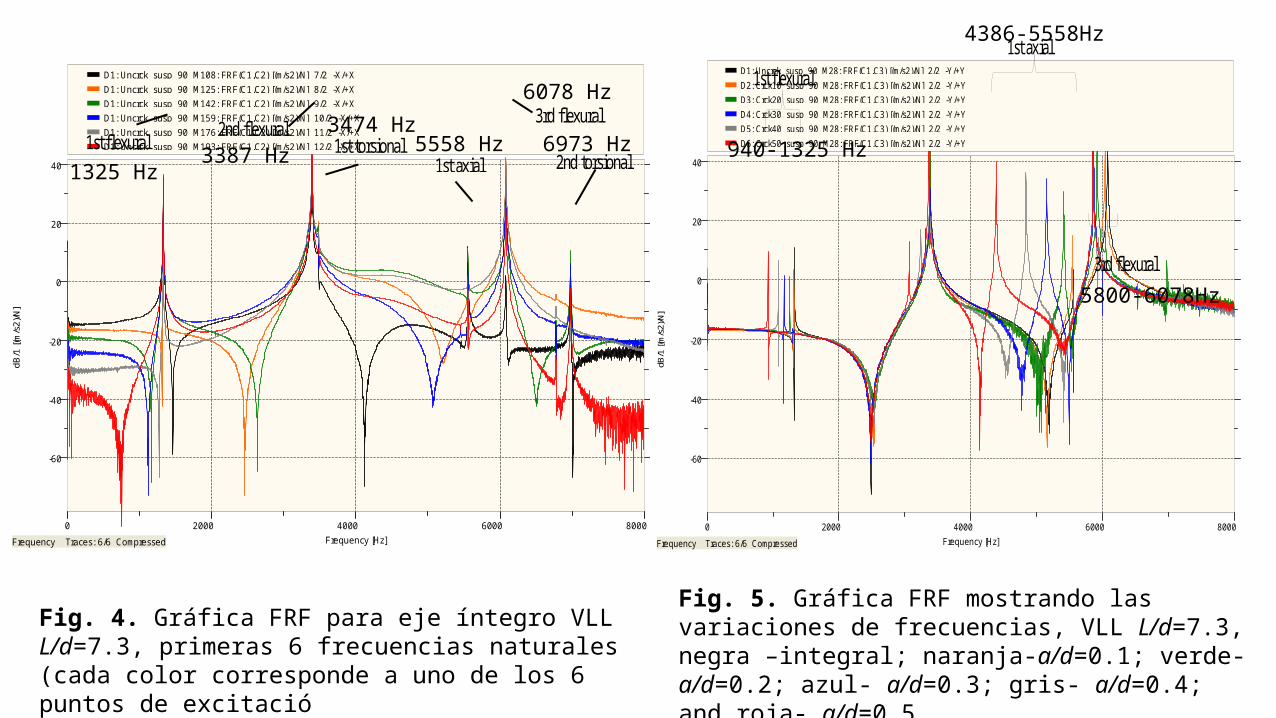
Fig. 4. Gráfica FRF para eje íntegro VLL L/d=7.3, primeras 6 frecuencias naturales (cada color corresponde a uno de los 6 puntos de excitació
0 2000 4000 6000 8000Frequency [Hz]
-60
-40
-20
0
20
40
dB/1 [(m/s2)/N]
Frequency Traces: 6/6 Compressed
D1: Uncrck_susp_90 M 28: FRF(C1,C3) [(m/s2)/N] 2/2 -Y/+YD2: Crck10_susp_90 M 28: FRF(C1,C3) [(m/s2)/N] 2/2 -Y/+YD3: Crck20_susp_90 M 28: FRF(C1,C3) [(m/s2)/N] 2/2 -Y/+YD4: Crck30_susp_90 M 28: FRF(C1,C3) [(m/s2)/N] 2/2 -Y/+YD5: Crck40_susp_90 M 28: FRF(C1,C3) [(m/s2)/N] 2/2 -Y/+YD6: Crck50_susp_90 M 28: FRF(C1,C3) [(m/s2)/N] 2/2 -Y/+Y
1st flexural 1st axial
3rd flexural
0 2000 4000 6000 8000
Frequency [Hz]
-60
-40
-20
0
20
40
dB/1 [(m
/s2)/N]
Frequency Traces: 6/6 Compressed
D1: Uncrck_susp_90 M 108: FRF(C1,C2) [(m/s2)/N] 7/2 -X/+XD1: Uncrck_susp_90 M 125: FRF(C1,C2) [(m/s2)/N] 8/2 -X/+XD1: Uncrck_susp_90 M 142: FRF(C1,C2) [(m/s2)/N] 9/2 -X/+XD1: Uncrck_susp_90 M 159: FRF(C1,C2) [(m/s2)/N] 10/2 -X/+XD1: Uncrck_susp_90 M 176: FRF(C1,C2) [(m/s2)/N] 11/2 -X/+XD1: Uncrck_susp_90 M 193: FRF(C1,C2) [(m/s2)/N] 12/2 -X/+X1st flexural 2nd flexural
1st torsional 1st axial
3rd flexural
2nd torsional
Fig. 5. Gráfica FRF mostrando las variaciones de frecuencias, VLL L/d=7.3, negra –integral; naranja-a/d=0.1; verde-a/d=0.2; azul- a/d=0.3; gris- a/d=0.4; and roja- a/d=0.5
1325 Hz 3387 Hz3474 Hz
5558 Hz
6078 Hz
6973 Hz 940-1325 Hz
4386-5558Hz
5800-6078Hz
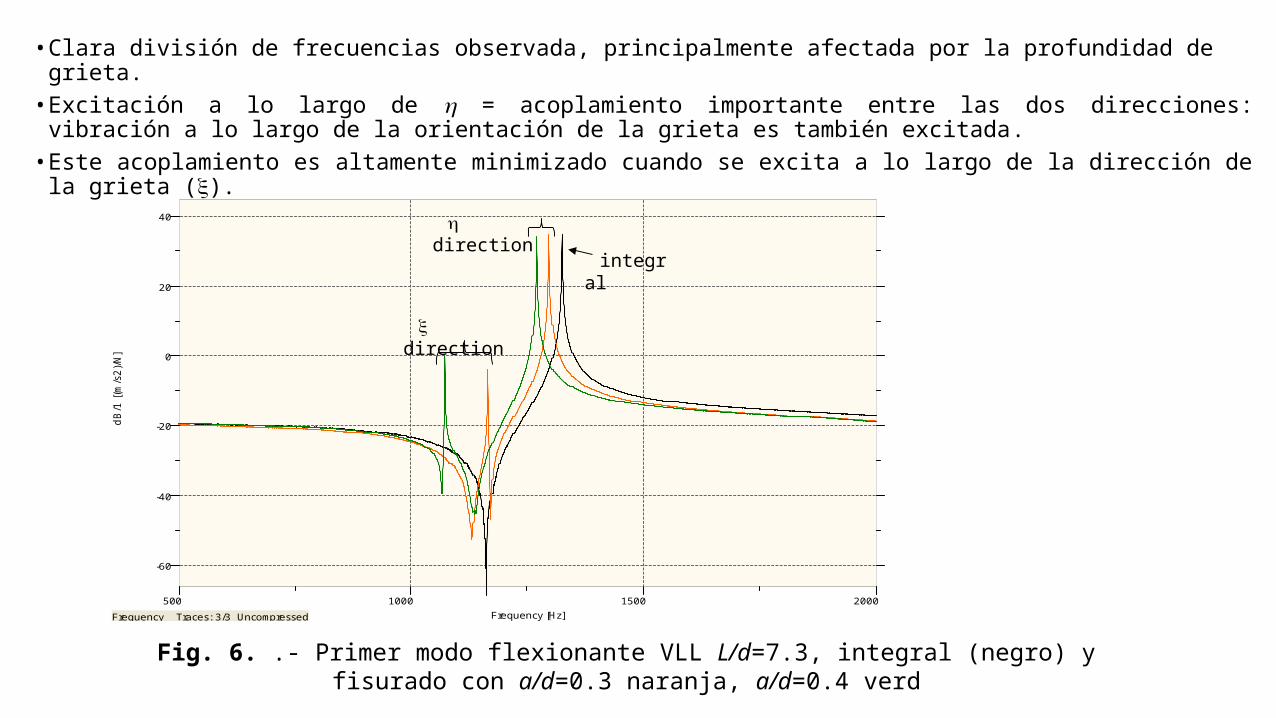
•Clara división de frecuencias observada, principalmente afectada por la profundidad de grieta.
•Excitación a lo largo de = acoplamiento importante entre las dos direcciones: vibración a lo largo de la orientación de la grieta es también excitada.
•Este acoplamiento es altamente minimizado cuando se excita a lo largo de la dirección de la grieta ().
Fig. 6. .- Primer modo flexionante VLL L/d=7.3, integral (negro) y fisurado con a/d=0.3 naranja, a/d=0.4 verd
500 1000 1500 2000Frequency [Hz]
-60
-40
-20
0
20
40
dB/1 [(m
/s2)/N
]
Frequency Traces: 3/3 Uncompressed
direction
direction
integral
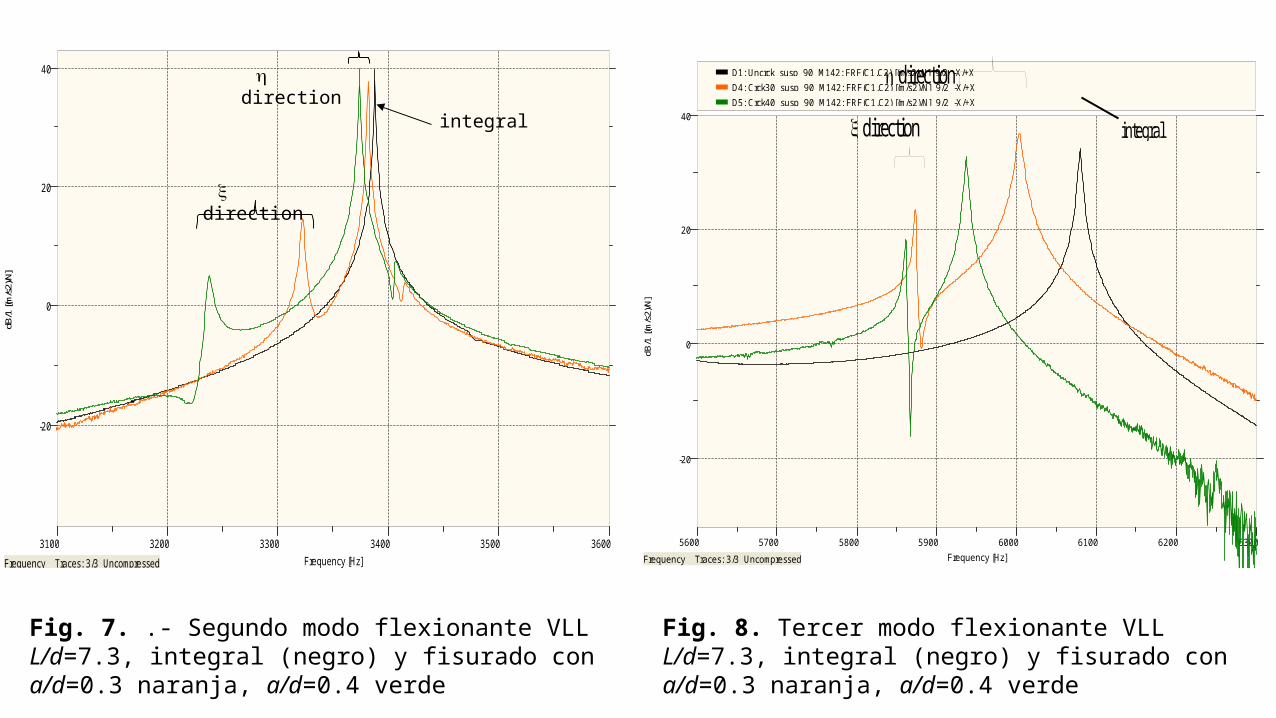
5600 5700 5800 5900 6000 6100 6200 6300Frequency [Hz]
-20
0
20
40
dB/1 [(m/s2)/N]
Frequency Traces: 3/3 Uncompressed
D1: Uncrck_susp_90 M 142: FRF(C1,C2) [(m/s2)/N] 9/2 -X/+XD4: Crck30_susp_90 M 142: FRF(C1,C2) [(m/s2)/N] 9/2 -X/+XD5: Crck40_susp_90 M 142: FRF(C1,C2) [(m/s2)/N] 9/2 -X/+X
direction
direction
integral
Fig. 8. Tercer modo flexionante VLL L/d=7.3, integral (negro) y fisurado con a/d=0.3 naranja, a/d=0.4 verde
Fig. 7. .- Segundo modo flexionante VLL L/d=7.3, integral (negro) y fisurado con a/d=0.3 naranja, a/d=0.4 verde
3100 3200 3300 3400 3500 3600Frequency [Hz]
-20
0
20
40
dB/1 [(m/s2)/N]
Frequency Traces: 3/3 Uncompressed
direction
direction
integral
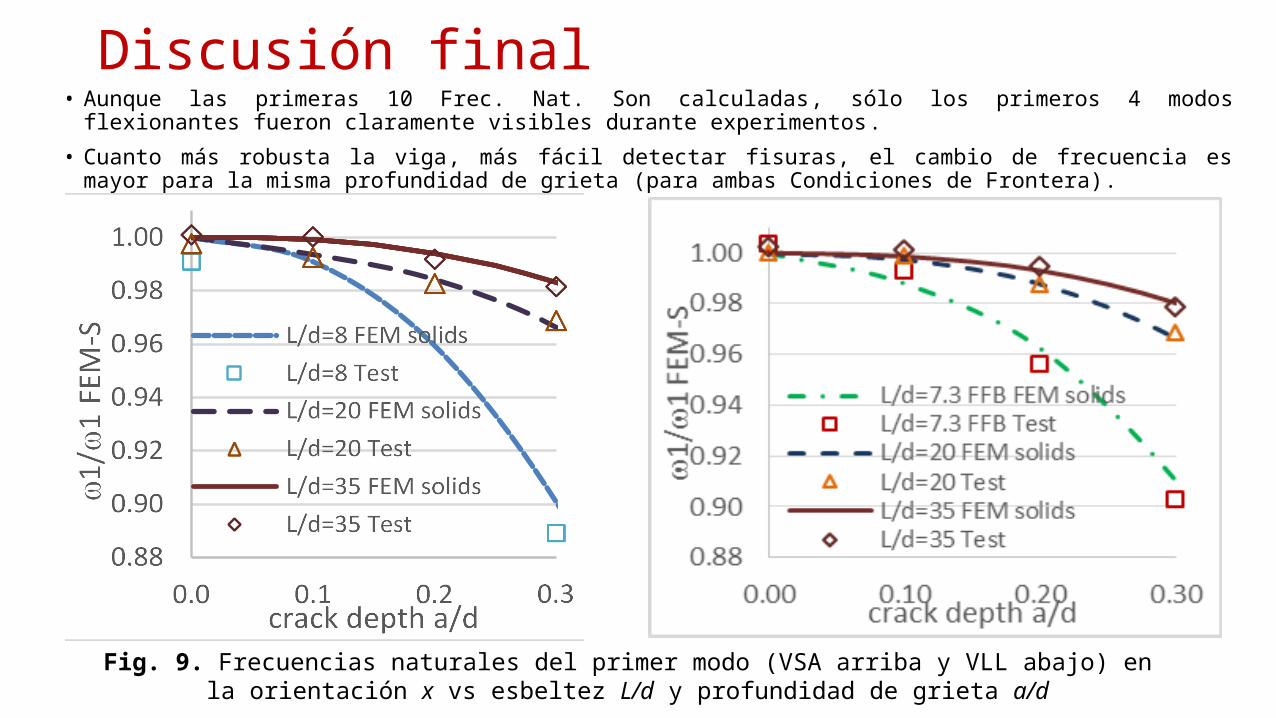
Discusión final• Aunque las primeras 10 Frec. Nat. Son calculadas, sólo los primeros 4 modos flexionantes fueron claramente visibles durante experimentos.
• Cuanto más robusta la viga, más fácil detectar fisuras, el cambio de frecuencia es mayor para la misma profundidad de grieta (para ambas Condiciones de Frontera).
Fig. 9. Frecuencias naturales del primer modo (VSA arriba y VLL abajo) en
la orientación x vs esbeltez L/d y profundidad de grieta a/d
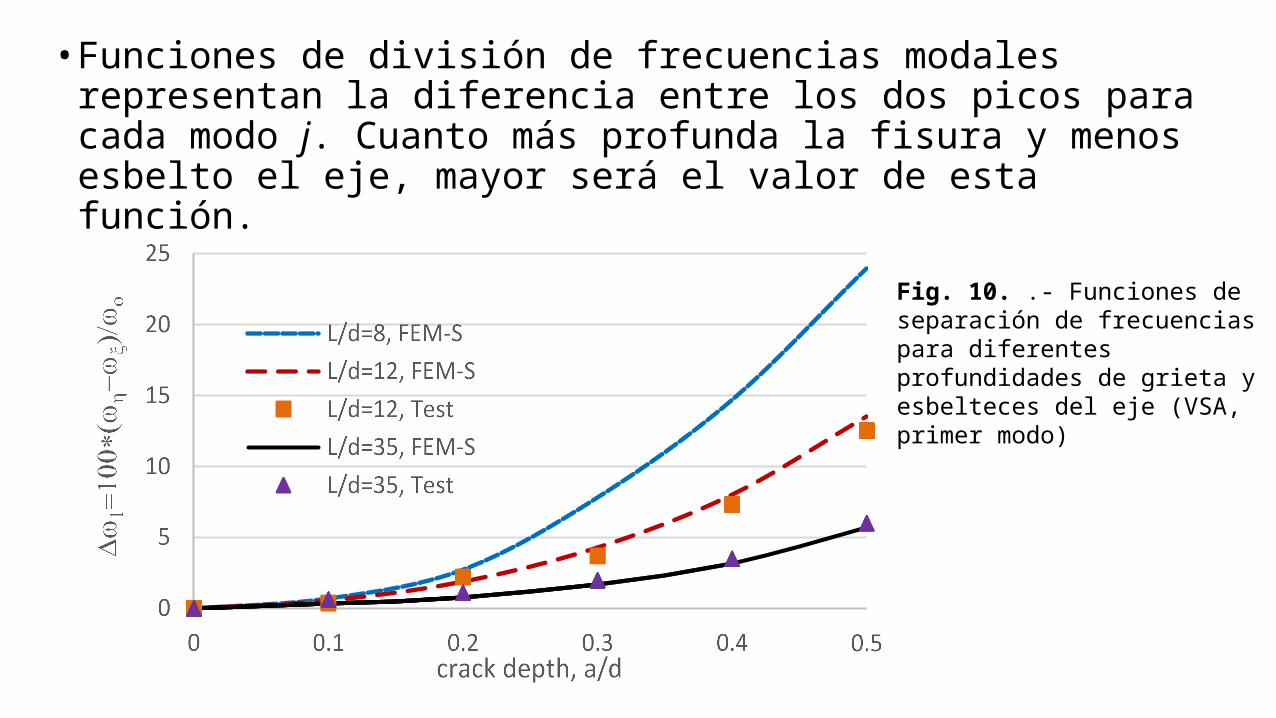
•Funciones de división de frecuencias modales representan la diferencia entre los dos picos para cada modo j. Cuanto más profunda la fisura y menos esbelto el eje, mayor será el valor de esta función.
Fig. 10. .- Funciones de separación de frecuencias para diferentes profundidades de grieta y esbelteces del eje (VSA, primer modo)
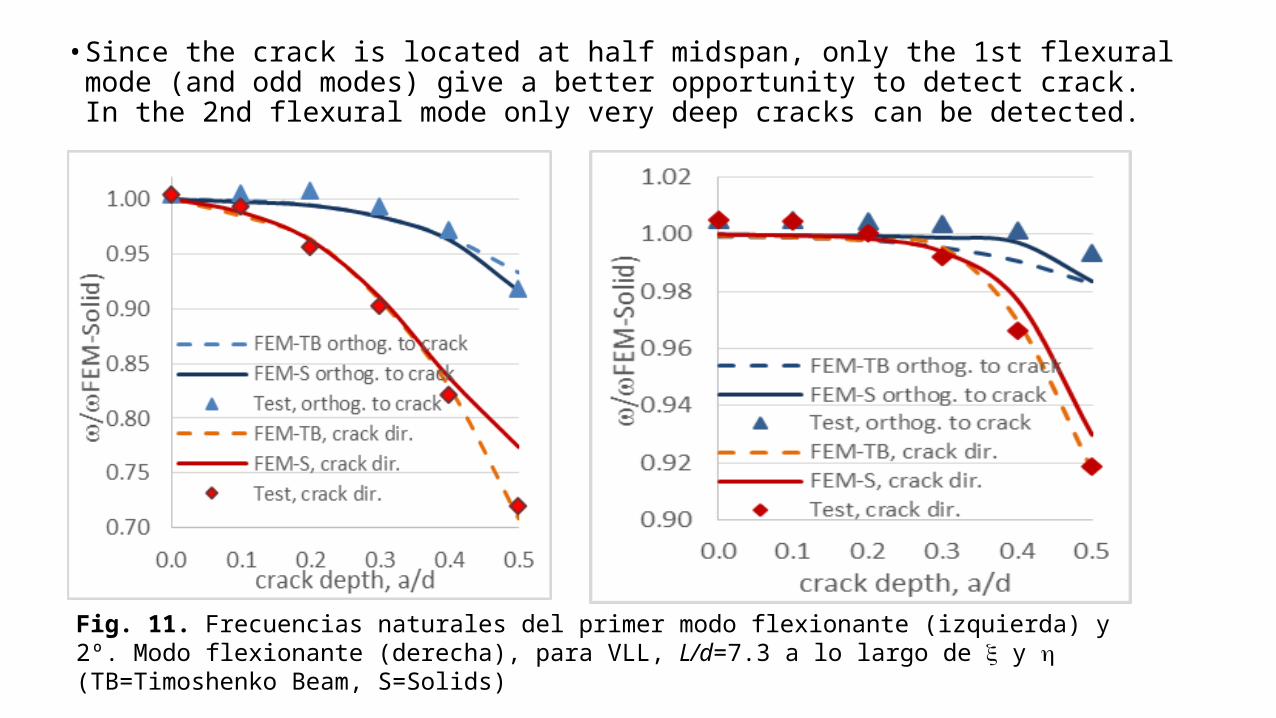
•Since the crack is located at half midspan, only the 1st flexural mode (and odd modes) give a better opportunity to detect crack. In the 2nd flexural mode only very deep cracks can be detected.
Fig. 11. Frecuencias naturales del primer modo flexionante (izquierda) y 2º. Modo flexionante (derecha), para VLL, L/d=7.3 a lo largo de y (TB=Timoshenko Beam, S=Solids)
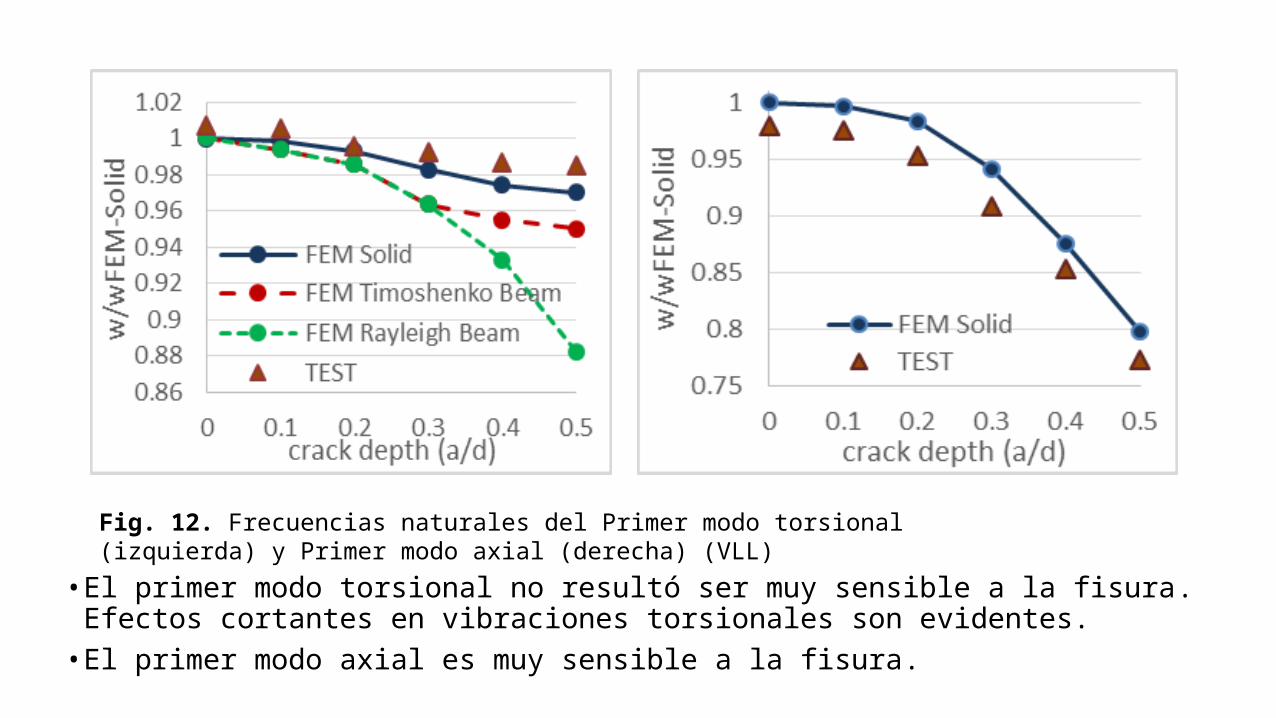
•El primer modo torsional no resultó ser muy sensible a la fisura. Efectos cortantes en vibraciones torsionales son evidentes.
•El primer modo axial es muy sensible a la fisura.
Fig. 12. Frecuencias naturales del Primer modo torsional (izquierda) y Primer modo axial (derecha) (VLL)
Conclusiones•Las máquinas reales son mucho más complejas que vigas simples; sin embargo este estudio ayuda a definir las condiciones de fácil detección de fisuras i.e. f(L/d, a/d).
•Los elementos vigas usan Leq para modelar la fisura reproduciendo fielmente la división de frecuencias.
•La esbeltez del eje tiene un efecto importante en la detección de fisuras; i.e., esbeltas= difícil de detectar.
•El respiro de la grieta es muy compleja y no lineal, ejes con muesca (grieta siempre abierta) proporcionan valores límite superiores de reducción de frecuencias.
•Existe acoplamiento de energía vibracional en ambas direcciones ortogonales de la sección.
gracias
Related Documents











