REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE MINISTERE DE L’ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE UNIVERSITE DES SCIENCES ET DE LA TECHNOLOGIE MOHAMED BOUDIAF FACULTE DE PHYSIQUE Cours Mécanique Rationnelle Salim BAADJ Ce cours est destiné aux étudiants 2 éme ANNEE LMD Domaine Sciences et Technologies 2021-2022 D O C B A

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE
MINISTERE DE L’ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE
UNIVERSITE DES SCIENCES ET DE LA TECHNOLOGIE
MOHAMED BOUDIAF
FACULTE DE PHYSIQUE
Cours Mécanique Rationnelle
Salim BAADJ
Ce cours est destiné aux étudiants 2émeANNEE LMD
Domaine Sciences et Technologies
2021-2022
D O
C B
A
Contenu de la matière :
Chapitre 1 : Rappels mathématiques (éléments de calcul vectoriel). 1.1. Vecteurs
1.1. Propriétés de base 1.2. Produit scalaire 1.3. Produit vectorielle 1.4. Produit Mixte 1.5. Projection des vecteurs
1.5.1. Projection orthogonale d’un vecteur sur un axe 1.5.2. Projection orthogonale d’un vecteur sur un plan
1.2. Torseurs 2.1. Définition : 2.2. Propriétés des torseurs
2.2.1. L’équivalence de deux torseurs : 2.2.2. Torseur nul : 2.2.3. Somme de deux torseurs : 2.2.4. Multiplication d’un torseur par un scalaire :
2.3.Axe central d’un torseur 2.4.Pas du torseur 2.5.Torseur couple
Exercices Chapitre 2 : Statique 2.1. Généralités et définitions de base 2.1.1. Définition et sens physique de la force 2.1.2. Les systèmes de forces 2.1.3. Opérations sur la force (composition, décomposition, projection)
A. Décomposition géométrique d’une force B. Résultante de deux forces concourantes
2.2. Statique. 2.2.1. Moment d'une force par rapport à un point 2.2.2. Moment d'une force par rapport à un axe 2.2.3. Théorème de Varignon 2.2.4. Condition d’équilibre statique 2.2.5. Liaisons, appui et réactions Exercices
Chapitre 3 : cinématique du solide rigide. 3.1. Rappels sur les quantités cinématiques pour un point matériel. 3.2. Cinématique du corps solide
3.2.1. Définitions: Solide rigide Vecteur vitesse de rotation
3.2.2. Champ des vitesses d'un solide en mouvement-Formule de Varignon:
3.2.3. Equiprojectivité du champ de vitesses d’un solide 3.2.4. Torseur cinématique
3.2.5. Champ des accélérations 3.3. Les lois de composition des mouvements
3.3.1. Composition des vitesses 3.3.2. Composition des accélérations 3.3.3. Compositiondes vecteurs rotations
3.4. Mouvements fondamentaux 3.4.1. Mouvement de translation: 3.4.2. Mouvement de rotation pur autour d’un axe: 3.4.3. Mouvement hélicoidal (translation+rotation) 3.4.4. Mouvement plansur plan Exercice
Chapitre 4 : Géométrie de masse. 4.1 Masse d’un système matériel
4.1.1 Système continu 4.1.2. Système discret
4.2 Formulation intégrale du centre de masse 4.2.1. Définitions (cas linéaire, surfacique et volumique) 4.2.2 Formulation discrète du centre de masse 4.2.3 Théorèmes de GULDIN
4.3. Moment et produit d’inertie de solides 4.4. Tenseur d’inertie d’un solide
4.4.1 Cas particuliers 4.4.2 Axes Principaux d’inertie
4.5 Théorème d’Huygens 4.6 Moment d’inertie de solides par rapport à un axe quelconque. 5.6. Moment d’inertie de solides par rapport à un axe quelconque. Exercices Chapitre 6 : Dynamique du solide rigide. 5.1. Rappels sur les quantités dynamiques pour un point matériel 5.2. Élément de cinétique du corps rigide 5.2.5. Théorème de Koenig
A. 1er Théorème de Koenig pour le moment cinétique B. 2iém Théorème de Koenig pour l’énergie cinétique
5.3. La dynamique d'un corps solide 5.3.2. Principe fondamental de la dynamique (PFD) La loi fondamentale de la dynamique Théorème des actions réciproque
5.3.3. Travail et puissance d’une force 5.3.4. Théorème de l’énergie cinétique. Exercice
AVANT–PROPOS
Ce manuel est un cours de base de la mécanique des systèmes de solides
rigides (Mécanique Rationnelle), particulièrement destiné aux étudiants
de premier cycle universitaire, domaine Science Technologies (ST). Cette
première édition respecte le contenu du descriptif de la mécanique
Rationnelle pour les filières Génie civil, Génie mécanique, Génie
maritime, électronique et chimie, de l'université des sciences et de la
technologies d'Oran Mohamed Boudiaf . Il est rédigé sous forme de cours
détaillés, avec des applications et des exercices. Il est présenté d'une
manière qui permet l'étudiant de comprendre facilement et très
rapidement. Après une rappelle mathématique sur les vecteurs et les
torseurs, ce polycopié aborde les trois axes fondamentaux de la
mécanique: la statique, la cinématique, et la dynamique des solides, plus
un chapitre concerne la géométrie des masses.
Mr .BAADJ Salim. (MCB)
Faculté de Physique-USTO. MB
Tel. (+213) 0792 961 241
Chapitre 1
Rappels mathématiques
(Éléments de calcul vectoriel)

Chapitre1 : Rappels Mathématiques
Mécanique Rationnelle, L2(LMD) S. BAADJ 6
A C
A
B
Chapitre1 :Rappels Mathématiques 1. Vecteurs:
1.1. Propriétés de base Un vecteur, est un segment de droite orienté, relié entre deux points de l’espace, le point O
est l’origine et d’autre point A est l’extrémité.
Tout vecteur est définie par : a. Son Origine b. Sa direction c. Son sens d. Son module
L’addition des deux vecteurs est commutative. (Figure 1.1)
Tout vecteur 푉 en trois dimensions (3D) est définie algébriquement par c’est composantes x,
y et z, dans lequel : 푉= 푥푒 + 푦푒+ 푧푒.
푅 (푒,푒, 푒) est une base orthonormé dans 푅 . Tel que : 푒 ∗ 푒 = 1, 푖 = 푗0, 푖 ≠ 푗
Le module ou la longueur du vecteur 푉 peut calculer par le théorème de Pythagore,
Talque : 푉 = 푥² + 푦² + 푧².
La somme de deux vecteurs 푉 , et 푉 est un vecteur 푊 définie analytiquement par : Soit 푉 = 푥 푒 + 푦 푒+ 푧 푒 et 푉 = 푥 푒 + 푦 푒+ 푧 푒 donc :
푊 = 푉 + 푉 = (푥 + 푥 )푒+ (푦 + 푦 )푒 + (푧 + 푧 )푒
Figure 1.1. Addison de deux vecteurs
B

Chapitre1 : Rappels Mathématiques
Mécanique Rationnelle, L2(LMD) S. BAADJ 7
Figure 1.2 Système des forces en équilibre
1.2. Produit scalaire On appelle un produit scalaire de deux vecteurs 푉 푒푡푉 une loi de composition qui associe aux
deux vecteurs un scalaire. Tel que : 푉 . 푉 = 푉 푉 cos(푉 푉 )
Le produit scalaire peut définie par l’expression analytique : 푉 . 푉 = 푥 푥 + 푦 푦 + 푧 푧
1.3. Produit vectorielle
Le produit vectorielle de deux vecteurs est un vecteur, tel que : 푊 = 푉 ∧ 푉 = 푉 푉 sin 푉 푉 푛
푛, est vecteur unitaire perpendiculaire au plant formé par 푉 푒푡푉 On peut définie le produit vectorielle entre deux vecteurs par la forme matricielle suivantes: Soient :
푉 =푥푦푧
푒푡푉 =푥푦푧
Donc : 푊 = 푉 ∧ 푉 =푦 푧 − 푦 푧푧 푥 − 푧 푥푥 푧 − 푥 푧
Chapitre1 : Rappels Mathématiques
Mécanique Rationnelle, L2(LMD) S. BAADJ 8
푉
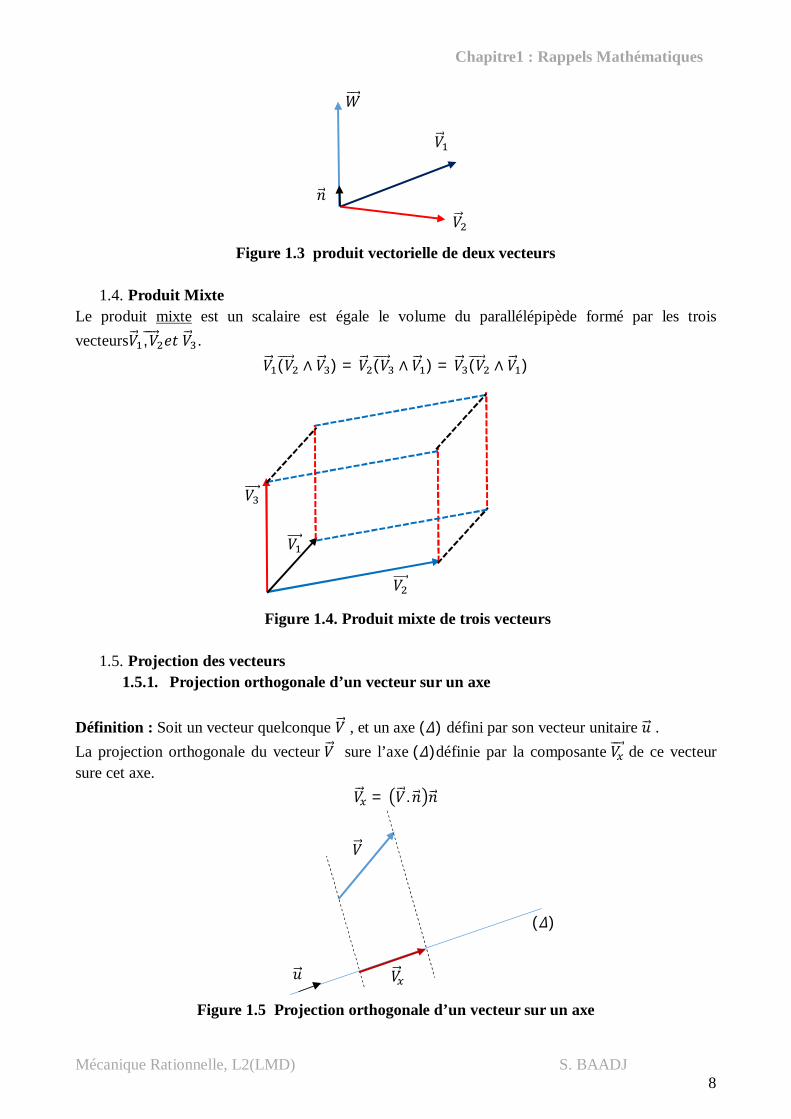
Figure 1.3 produit vectorielle de deux vecteurs
1.4. Produit Mixte Le produit mixte est un scalaire est égale le volume du parallélépipède formé par les trois vecteurs푉 , 푉 푒푡푉 .
푉 (푉 ∧ 푉 ) = 푉 (푉 ∧ 푉 ) = 푉 (푉 ∧ 푉 )
Figure 1.4. Produit mixte de trois vecteurs
1.5. Projection des vecteurs
1.5.1. Projection orthogonale d’un vecteur sur un axe Définition : Soit un vecteur quelconque 푉 , et un axe (훥) défini par son vecteur unitaire 푢 . La projection orthogonale du vecteur 푉 sure l’axe (훥)définie par la composante 푉 de ce vecteur sure cet axe.
푉 = 푉. 푛 푛
Figure 1.5 Projection orthogonale d’un vecteur sur un axe
(훥)
푉
푢 푉
푉
푊
푛
푉
푉
푉

Chapitre1 : Rappels Mathématiques
Mécanique Rationnelle, L2(LMD) S. BAADJ 9
1.5.2. Projection orthogonale d’un vecteur sur un plan
Définition : Soit 푉 un vecteur quelconque, sa projection sur le plan (휋)défini par la normale 푛est la composante 푉 dans le plan.
Figure 1.6 Projection orthogonale d’un vecteur sur un plan
On peut écrire la projection de 푉 sur la plan par la relation suivant : 푉 = 푉 − 푉 D’où 푉 = 푉(푛. 푛) et 푉 = 푉. 푛 푛 Donc : 푉 = 푉(푛. 푛)− 푉. 푛 푛
Et on retrouve l’expression vectorielle du vecteur 푉 par la relaion double vectoriel suivante :
푉 = 푛 ∧ (푉 ∧ 푛) 2. Torseurs
2.1. Définition :
On appelle torseur [T] l'ensemble d'un champ de vecteurs 푀 en un point A et de son vecteur 푅associé. On note
[푇] = 푅푀
Tel que 푅appelé résultante des vecteurs : 푉 ,푉 , 푉 ,….푉 appliqués respectivement aux points : 퐵 ,퐵 , 퐵 …퐵 . Donné par :
푅 = 푉
Et 푀 est le moment résultant en un point A de l’espace est donné par :
푀 = 퐴퐵 ∧ 푉
푉
푛 푉
(휋) 푉

Chapitre1 : Rappels Mathématiques
Mécanique Rationnelle, L2(LMD) S. BAADJ 10
Ces deux vecteurs 푅 et 푀 sont appelés éléments de réduction du torseur au point A. Remarque : Connaissant le Torseur [푇] en un point A nous pouvons déterminer les éléments de
réduction de ce même torseur en un autre point A de l’espace à l’aide de l’équation de transport :
Nous avons en effet :
푀 = 퐶퐵 ˄푉
Sachant que : 퐶퐵 = 퐶퐴 + 퐴퐵 et 푀 = ∑ 퐴퐵 ∧ 푉
푀 = (퐶퐴 + 퐴퐵 ) ∧ 푉 = 퐶퐴 ∧ 푉 + 퐴퐵 ∧ 푉 = 퐶퐴 ∧ 푉 + 푀 = 퐶퐴 ∧ 푅 + 푀
Nous obtiendrons l’équation de transport qui permet de déterminer le moment en un point C en
connaissant le moment au point A.
푀 = 퐶퐴 ∧ 푅 + 푀
2.2. Propriétés des torseurs
2.2.1. L’équivalence de deux torseurs : Deux torseurs sont équivalents [푇 ] = [푇 ] si et seulement si,
[푇 ] = [푇 ] ↔ 푅 = 푅
푀 = 푀
2.2.2. Torseur nul :
Un torseur est nul, si ses éléments de réduction sont nuls :
[0] = 푅 = 0푀 = 0
2.2.3. Somme de deux torseurs : Soient [푇 ] = [푇 ] deux torseurs, la somme de deux torseur est un torseur dont ses éléments de réduction sont la somme des éléments de réduction des deux torseurs.
[푇] = [푇 ] + [푇 ] ↔ [푇] = 푅 = 푅 + 푅
푀 = 푀 + 푀

Chapitre1 : Rappels Mathématiques
Mécanique Rationnelle, L2(LMD) S. BAADJ 11
2.2.4. Multiplication d’un torseur par un scalaire :
Soient un torseur :
[푇] = 푅푀
Et 휆 un scalaire real. Nous pouvons écrire :
휆[푇] = 휆. 푅휆. 푀
2.3. Axe central d’un torseur Soit un torseur
[푇] = 푅푀
On appelle axe central de [푇], l'ensemble des points P pour lesquels le moment 푀 est colinéaire à푅. donnée par l'équation paramétrique d'une droite parallèle à 푅.
퐴푃 =푅 ∧ 푀푅²
+ 휆. 푅 휆 est un scalaire real.
2.4. Pas du torseur Si le moment 푀 est colinéaire à 푅. 푀 = 휶. 푅, d’où 푀 = 푀 + 푃퐴 ∧ 푅 = 휶. 푅. le produit scalaire de cette expression par le vecteur résultant 푅 donne :
푅. (푀 + 푃퐴 ∧ 푅) = 휶.푅²
Ce qui donne
휶 =푅.푀푹²
훼 est appelé le Pas du torseur.
2.5. Torseur couple Un torseur est dit un torseur couple, si et seulement si, sa résultante est nulle.
푅 = 0푀 ≠ 0
Le moment en un point A quelconque de l’espace est donné par:

Chapitre1 : Rappels Mathématiques
Mécanique Rationnelle, L2(LMD) S. BAADJ 12
푀 = 퐴퐵 ∧ 푉 + 퐴퐵 ∧ 푉 푀 = 퐴퐵 ∧ 푉 − 퐴퐵 ∧ 푉 푀 = (퐴퐵 − 퐴퐵) ∧ 푉 푀 = 퐵 퐵 ∧ 푉 Sachant que : 퐵 퐵 = 퐵 퐻 + 퐻퐵 푀 = 퐵 퐻 + 퐻퐵 ∧ 푉 = 퐻퐵 ∧ 푉 H est appelé le Bras, c’est la projection orthogonale du point 퐵 sur la droit support du vecteur 푉. En réalité le moment d’un torseur couple ne dépend que de la distance qui sépare les deux droites supports des deux vecteurs, il est indépendant du lieu où il est mesuré. Le moment d’un torseur couple ne dépend que de la distance qui sépare les deux droites supports des deux vecteurs.
B2
B1
H 푉
푉

Chapitre1 : Rappels Mathématiques
Mécanique Rationnelle, L2(LMD) S. BAADJ 13
Exercices Exercice 1: Soient les vecteurs 푽, 푽, 푽 et 푽 tel que: 푽 = + 4풌, 푽 = 2 + 풚+ 풛풌, 푽 = − 2+ 4풌 et 푽 = 4 + 풚+ 2풌. 1) Déterminer y et z pour que les vecteurs 푽 et 푽 soient colinéaires, 2) Déterminer y pour que les vecteurs 푽 et 푽 soient perpenduculaires, 3) trouver le volume d’un parallélépipède des cotés 푽, 푽 et 푽. (pour y=1, et z=1)
Corrigé d'Exercice1: 푽 = + 4풌, 푽 = 2 + 풚+ 풛풌, 푽 = − 2+ 4풌 et 푽 = 4 + 풚+ 2풌.
1) 푽 et 푽 sont colinaire푽˄푽 = 0
→104
˄2푦푧
=000
→−4푦8− 푧푦
=000
→ 푦 = 0푧 = 8
2) 푽 et 푽 sont perpendiculaire푽.푽 = 0
푽.푽 = 4− 2푦 + 8 = 0 → 푦 = 6
3) Volume d'un parallélépipède des cotes 푽,푽,푽=(푽˄푽).푽 Exercice 2: Dans un repère 푅 푂, , , 풌 orthonormé, deux points A et B ont pour coordonnées :
푨22−3
et 푩532
.
Déterminer : 1) Le moment du vecteur 퐴퐵 glissant par rapport au centre O du repère. 2) Le moment du vecteur glissant 퐴퐵 par rapport à la droite (∆) passant par le point 푂 et le point
퐶221
.

Chapitre1 : Rappels Mathématiques
Mécanique Rationnelle, L2(LMD) S. BAADJ 14
Corrigé d'Exercice2:
푨22−3
et푩532
1) Le moment du vecteur 퐴퐵 glissant par rapport au centre O du repère.
푀 퐴퐵 = OA˄퐴퐵
푀 퐴퐵 =221
˄315
=13−19−4
→ 푀 퐴퐵 = 13횤 − 19횥 − 4푘
2) Le moment du vecteur glissant 퐴퐵 par rapport à la droite (∆) passant par le point 푂 et le
point 퐶221
.
푛 =푂퐶푂퐶 =
13 (2횤+ 2횥 + 푘)
푀∆ 퐴퐵 = (푀 퐴퐵 .푛)푛 = 13횤 − 19횥 − 4푘 . 2횤 + 2횥 + 푘 푛
= −163 푛
Exercice 3: Soient les trois de cordonnés vecteurs, 푽(−1, 1,1)푽(0, 1,2) , 푽(1,−1,0) définis dans un repère푅 푂, , , 풌 orthonormé et liés respectivement au points, A(1,1,2), B(1,0,1) , C(1,2,1) 1) Construire le torseur [푇] associé au système de vecteurs. 2) En déduire l’automoment. 3) Calculer le pas du torseur. 4) Déterminer l’axe central du torseur vectoriellement.
Corrigé d'Exercice3: 푽(−1, 1,1)푽(0, 1,2), 푽(1,−1,0) liés respectivement au points, A(1,1,2), B(1,0,1) , C(1,2,1)
1) Construction du torseur [푇] : Les éléments de réduction du torseur sont:
[푇] =
⎩⎪⎨
⎪⎧ 푅 = 푉
푀 = 퐴퐵 ∧ 푉

Chapitre1 : Rappels Mathématiques
Mécanique Rationnelle, L2(LMD) S. BAADJ 15
푅 = 푽 + 푽 + 푽 = 횥 + 3푘
푀 = OA˄푽 + OB˄푽+ OC˄푽 =112
˄−111
+101
˄012
+121
˄1−10
=−1−32
+−1−21
˄11−3
=−1−40
→ 푀 = −횤 − 4횥
2) L'automomentA: 퐴 = 푅.푀 = (횥 + 3푘). (-횤 − 4횥) =-4
3) Le pas d'un torseur P :
푷 =푅.푀푹²
=−410
4) L'axe central:
On appelle axe central de [푇], l'ensemble des points P pour lesquels le moment 푀 est colinéaire à푅. donnée par l'équation paramétrique d'une droite parallèle à 푅.
퐴푃 =푅 ∧ 푀푅²
+ 휆. 푅
퐴푃 = . (횥 + 3푘)˄(-횤 − 4횥) =013
˄−1−40
+ 휆.013
퐴푃 =1
10
12−31
+ 휆.013
=1210 횤 + (휆 −
310)횥 + (
110 + 3휆)푘
Exercice 4: Soient deux torseurs [T1]Aet [T2]A définis au même point A par leurs éléments de réduction dans un repère orthonomé푅 푂, , , 풌
[푇 ] = 푅 = 2 + 4+ 2풌푀 = 2 + + 5풌
et [푇 ] = 푅 = −2 − 4− 2풌푀 = 2 − − 5풌
1) Déterminer l’axe centrale et le pas du torseur [푻 ]A 2) Construire le torseur [T]A =a [T1]A +b [T2]A 3) Quelle relation doivent vérifier a et b pour que [T]Asoit un torseur couple, 4) Montrer que le torseur couple est indépendant du point ou on le mesure.

Chapitre1 : Rappels Mathématiques
Mécanique Rationnelle, L2(LMD) S. BAADJ 16
Corrigé d'Exercice4:
[푇 ] = 푅 = 2 + 4+ 2풌푀 = 2 + + 5풌
et [푇 ] = 푅 = −2 − 4− 2풌푀 = 2 − − 5풌
1) L’axe centrale et le pas du torseur [푻 ]A
L’axe centrale, C'est l'ensemble des points P pour lesquels le moment 푀 est colinéaire à푅. donnée par l'équation paramétrique d'une droite parallèle à 푅.
퐴푃 =푅 ∧ 푀푅²
+ 휆.푅
퐴푃 =1
24
242
˄215
+ 휆.242
=1
24
18−6−6
+ 휆.242
= (1824 + 2휆)횤 + (4휆 −
624)횥 + (2휆 −
624)푘
Le pas du torseur [푻 ]A
푷 =푅.푀푹²
=4 + 4 + 10
24 =1824 =
912
2) Construire le torseur [T]A =a [T1]A +b [T2]A
[T]A = 푅 = 푎푅 + 푏푅 = 2(푎 − 푏)+ 4(푎 − 푏)+ 2(푎 − 푏)풌푀 = 푎푀 + 푏푀 = 2(푎 + 푏)+ (푎 − 푏)+ 5(푎 − 푏)풌
3) Un torseur est dit un torseur couple, si et seulement si, sa résultante est nulle. 푅 = 0푀 ≠ 0
→ 표푛푖푚푝푙푖푞푢푒푞푢푒푎 = 푏 Et donc 푀 = 4푎
4) Le moment en un point A quelconque de l’espace est donné par : 푀 = 퐴퐵 ∧ 푉 + 퐴퐵 ∧ 푉 푀 = 퐴퐵 ∧ 푉 − 퐴퐵 ∧ 푉 푀 = (퐴퐵 − 퐴퐵) ∧ 푉 푀 = 퐵 퐵 ∧ 푉 Sachant que : 퐵 퐵 = 퐵 퐻 + 퐻퐵 푀 = 퐵 퐻 + 퐻퐵 ∧ 푉 = 퐻퐵 ∧ 푉 Le moment d’un torseur couple ne dépend que de la distance qui sépare les deux droites supports des deux vecteurs.
B2
B1
H 푉
푉
Chapitre 2: Statique 2.1. Généralités et définitions de base 2.1.1. Définition et sens physique de la force 2.1.2. Les systèmes de forces 2.1.3. Opérations sur la force (composition, décomposition, projection)
A. Décomposition géométrique d’une force B. Résultante de deux forces concourantes
2.2. Statique. 2.2.1. Moment d'une force par rapport à un point 2.2.2. Moment d'une force par rapport à un axe 2.2.3. Théorème de Varignon 2.2.4. Condition d’équilibre statique 2.2.5. Liaisons, appui et réactions
Chapitre 2: Statique
Mécanique Rationnelle, L2(LMD) S. BAADJ 18
Chapitre 2 : Statique
2.1. Généralités et notions fondamentales de la statique
2.1.1. Définition et sens physique de la force:
On désigne en mécanique la mesure quantitative d'interaction de type mécanique des corps matériels macroscopique. On appelleForce l'action d'un corps matériels sur un autre, se traduit par (une pression, une attraction, une répulsion, …)
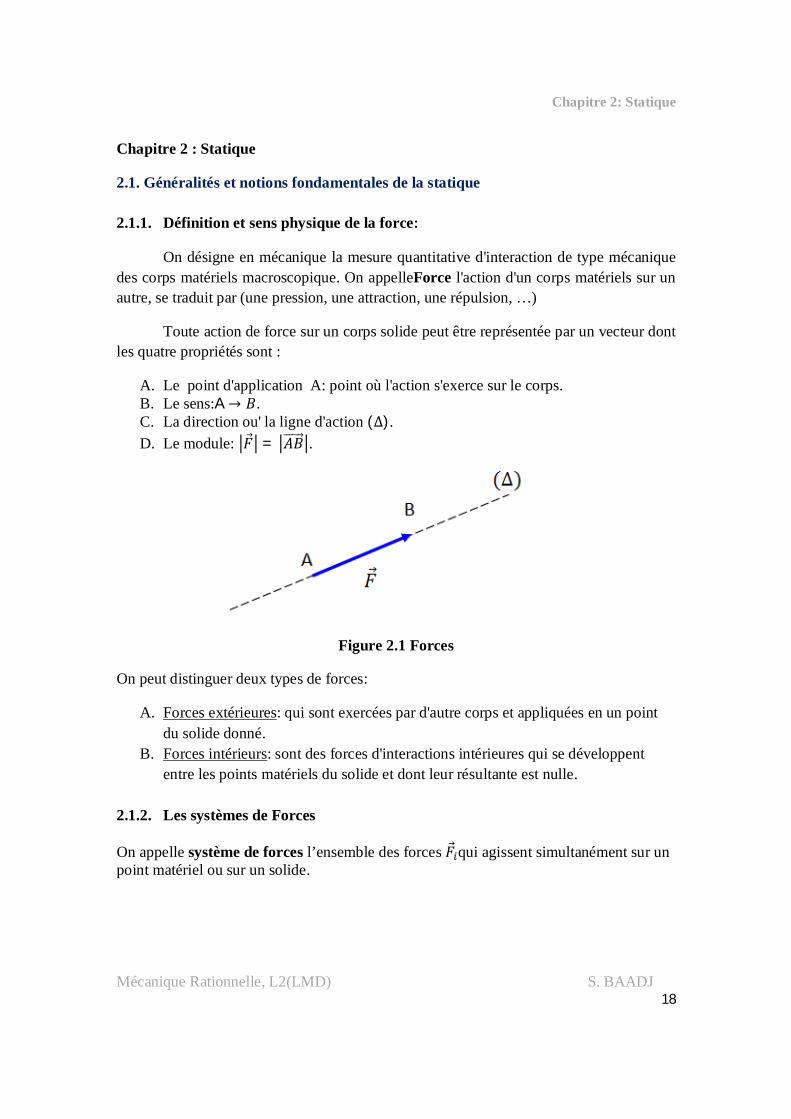
Toute action de force sur un corps solide peut être représentée par un vecteur dont les quatre propriétés sont :
A. Le point d'application A: point où l'action s'exerce sur le corps. B. Le sens:A → 퐵. C. La direction ou' la ligne d'action (∆). D. Le module: 퐹 = 퐴퐵 .
Figure 2.1 Forces
On peut distinguer deux types de forces:
A. Forces extérieures: qui sont exercées par d'autre corps et appliquées en un point du solide donné.
B. Forces intérieurs: sont des forces d'interactions intérieures qui se développent entre les points matériels du solide et dont leur résultante est nulle.
2.1.2. Les systèmes de Forces
On appelle système de forces l’ensemble des forces 퐹 qui agissent simultanément sur un point matériel ou sur un solide.
Chapitre 2: Statique
Mécanique Rationnelle, L2(LMD) S. BAADJ 19
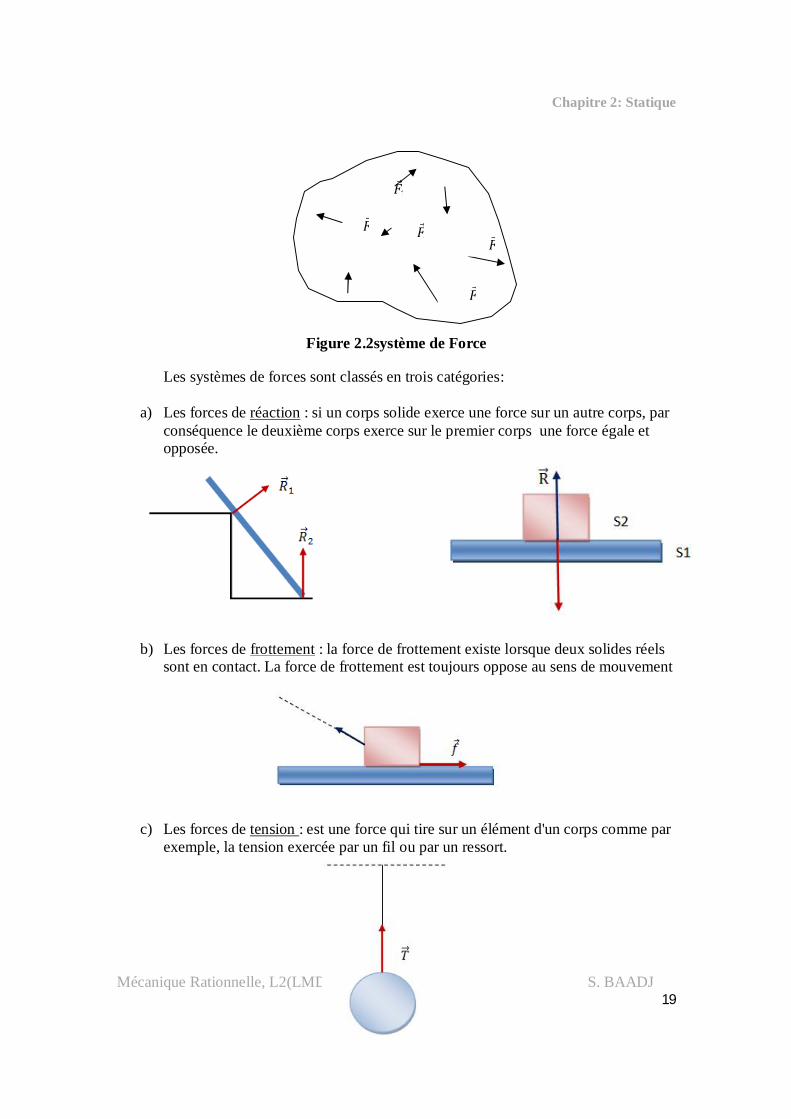
Figure 2.2système de Force
Les systèmes de forces sont classés en trois catégories:
a) Les forces de réaction : si un corps solide exerce une force sur un autre corps, par conséquence le deuxième corps exerce sur le premier corps une force égale et opposée.
b) Les forces de frottement : la force de frottement existe lorsque deux solides réels
sont en contact. La force de frottement est toujours oppose au sens de mouvement
c) Les forces de tension : est une force qui tire sur un élément d'un corps comme par
exemple, la tension exercée par un fil ou par un ressort.
퐹
퐹 퐹
퐹
퐹

Chapitre 2: Statique
Mécanique Rationnelle, L2(LMD) S. BAADJ 20
2.1.3. Opérations sur la force (composition, décomposition, projection) A. Décomposition géométrique d’une force
Soit une force 푭appliquée à l’origine 푶 d’un repère orthonormé,La composition de cette force sont définies par :
퐹 = 퐹 + 퐹 + 퐹 = 퐹 . 횤 + 퐹 . 횥 + 퐹 . 푘
Tel que: 퐹 = 퐹. 푐표푠휃 , 퐹 = 퐹. 푐표푠휃 , 퐹 = 퐹. 푐표푠휃
Avec:퐹² = 퐹 ² + 퐹 ² + 퐹 ²
Figure 2.6Décomposition géométrique d’une force
Les angles휃 ,휃 ,휃 se sont les trois angles définie par la projection de la force 푭sur les trois axes 푂푋,푂푌,푂푍 donne respectivement,comme il est indiqué sur la figure.
Figure 2.7 Angles d'Euler
휽풛
X
Y
Z
푭 휽풛
휽풙휽풚
푭
X
Y
Z 푭
푭
푭
Chapitre 2: Statique
Mécanique Rationnelle, L2(LMD) S. BAADJ 21
On peut notamment exprimer le module de la force 푭en utilisant les cosinus directeurs : 퐹
푐표푠휃푥=
퐹푐표푠휃푦
=퐹
푐표푠휃푧
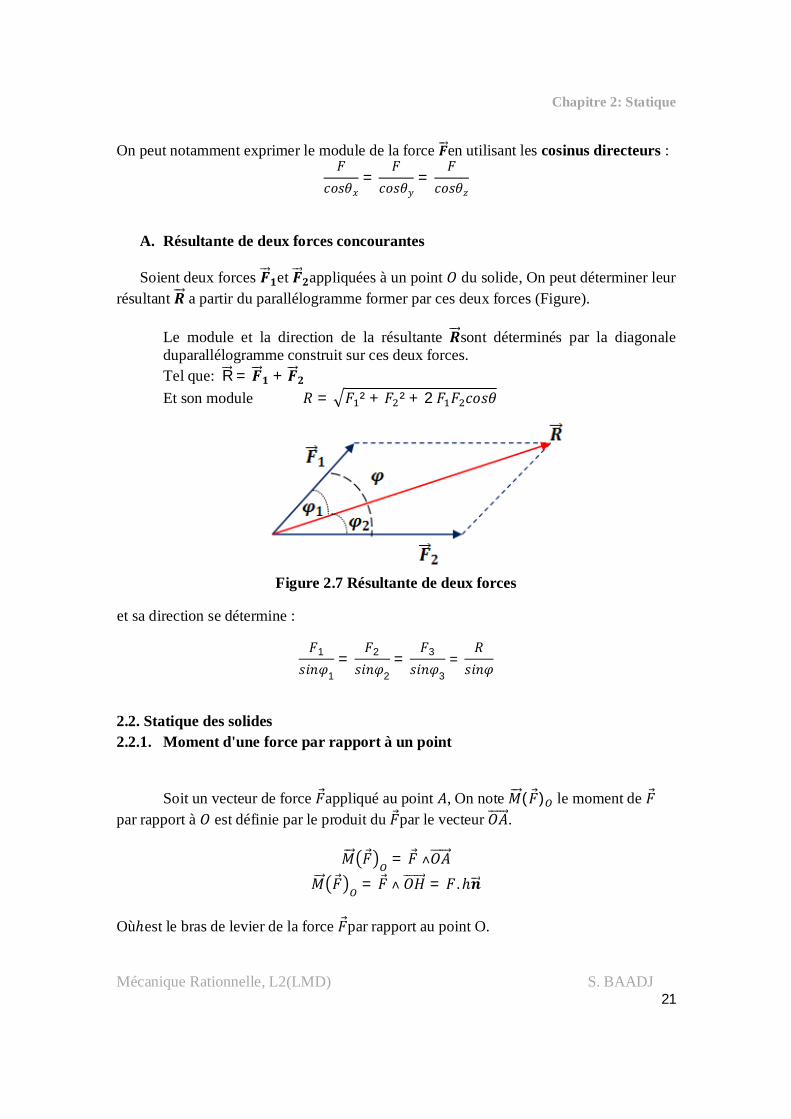
A. Résultante de deux forces concourantes
Soient deux forces 푭ퟏet 푭ퟐappliquées à un point 푂 du solide, On peut déterminer leur résultant 푹 a partir du parallélogramme former par ces deux forces (Figure).
Le module et la direction de la résultante 푹sont déterminés par la diagonale duparallélogramme construit sur ces deux forces. Tel que: R = 푭ퟏ + 푭ퟐ Et son module 푅 = 퐹 ² + 퐹 ² + 2퐹 퐹 푐표푠휃
Figure 2.7 Résultante de deux forces
et sa direction se détermine :
퐹1
푠푖푛휑1=
퐹2
푠푖푛휑2=
퐹3
푠푖푛휑3=
푅푠푖푛휑
2.2. Statique des solides 2.2.1. Moment d'une force par rapport à un point
Soit un vecteur de force 퐹appliqué au point 퐴, On note 푀(퐹) le moment de 퐹 par rapport à 푂 est définie par le produit du 퐹par le vecteur 푂퐴.
푀 퐹 = 퐹˄푂퐴 푀 퐹 = 퐹˄푂퐻 = 퐹.ℎ풏
Oùℎest le bras de levier de la force 퐹par rapport au point O.
Chapitre 2: Statique
Mécanique Rationnelle, L2(LMD) S. BAADJ 22
Démonstration:
Par définition on: 푀 퐹 = 퐹˄푂퐴 et푂퐴 = 푂퐻˄퐻퐴 푀 퐹 = 퐹˄푂퐴
푀 퐹 = 퐹˄(푂퐻˄퐻퐴)
푀 퐹 = 퐹˄푂퐻 + 퐹˄퐻퐴
퐹//퐻퐴implique que 퐹˄퐻퐴 = 0
On obtiendra:
푀 퐹 = 퐹˄푂퐻 = 푭.푶푯. 풔풊풏ퟗퟎ°풌 = 푭.풉. 풌
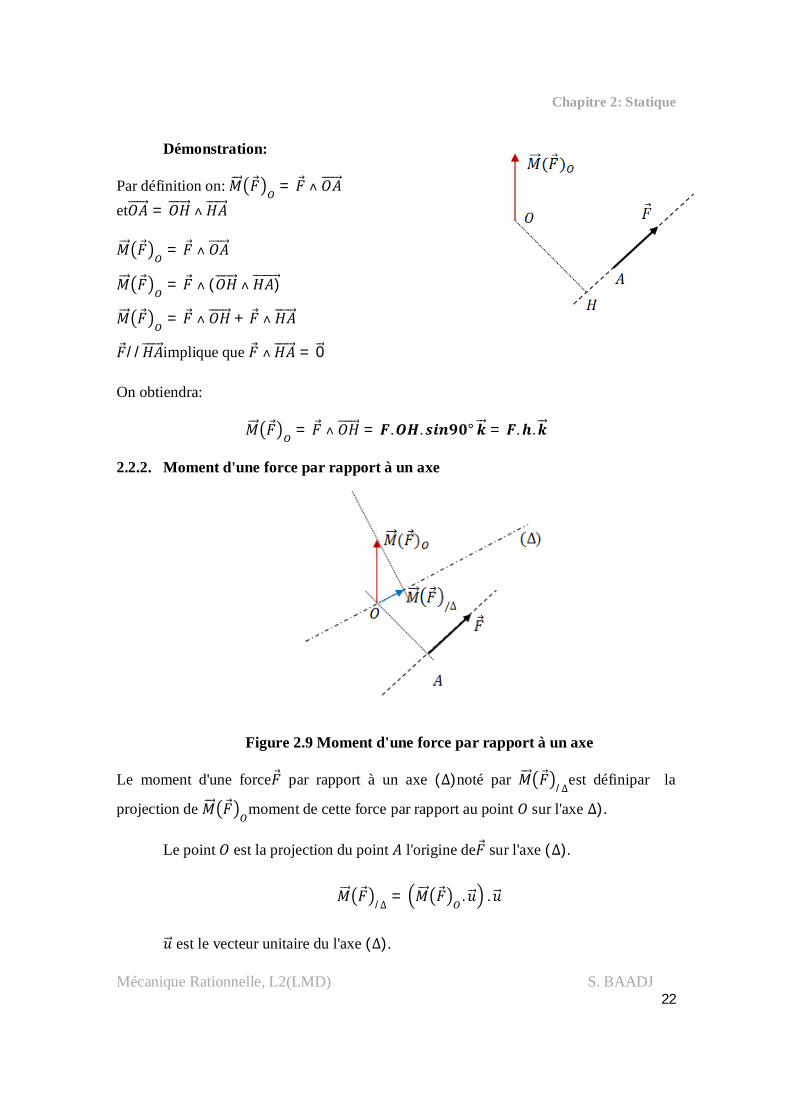
2.2.2. Moment d'une force par rapport à un axe
Figure 2.9 Moment d'une force par rapport à un axe
Le moment d'une force퐹 par rapport à un axe (∆)noté par 푀 퐹/∆
est définipar la
projection de 푀 퐹 moment de cette force par rapport au point 푂 sur l'axe ∆).
Le point 푂 est la projection du point 퐴 l'origine de퐹 sur l'axe (∆).
푀 퐹/∆
= 푀 퐹 . 푢 . 푢
푢 est le vecteur unitaire du l'axe (∆).

Chapitre 2: Statique
Mécanique Rationnelle, L2(LMD) S. BAADJ 23
2.1.1. Théorème de Varignon
Dans un système de forces concourantes en un point 퐴, le moment résultantpar rapport à un point quelconque푂 est égal au moment de la résultante par rapport au même point푂.
Démonstration:
Nous avons: 푂푀 = 푂퐴 + 퐴푀
푀 퐹 = 푂푀 ˄퐹 =푂푀˄퐹 + 푂푀˄퐹 + ⋯+ 푂푀˄퐹
푀 퐹 = 푂퐴+ 퐴푀 ˄퐹 + 푂퐴 + 퐴푀 ˄퐹 + ⋯+ (푂퐴 + 퐴푀)˄퐹
Or 퐴푀//퐹 implique que 퐴푀˄퐹 = 0
On obtient alors: 푀 퐹 = 푂퐴˄퐹 + 푂퐴˄퐹 + ⋯+ 푂퐴˄퐹
푀 퐹 = 푂퐴˄(퐹 + 퐹 + ⋯+ 퐹 ) = 푂퐴˄ 퐹 = 푂퐴˄푅
On obtient finalement: 푀 퐹 = 푀 푅
Figure 2.10 système de forces concourantes

Chapitre 2: Statique
Mécanique Rationnelle, L2(LMD) S. BAADJ 24
2.1.2. Condition d’équilibre statique Un corps solide est enéquilibrestatique lorsque plusieurs forces agissent simultanément sur lui et que ces forces ne modifient pas son état (état de repos ou son état de mouvement). Pour qu'uncorps solidesoit en équilibre statique il faut que le torseur de forces extérieuressoitnul:
[푇 ] =푅
푀 퐹 =00
Enconséquence:
1. la somme de toutes les forces extérieures auxquelles il est soumis, est nulle.
푅 = 퐹 = 0
2. le moment résultant de toutes ces forces soit nulle.
푀(퐹 ) = 0
Ces deux condition d’équilibre peut se traduisent en six équation analytique par la projection des éléments du torseur des forces sur les axes d’un repère orthonormé 푅(푂, 횤, 횥, 푘):
1. Trois équations liées à la résultante des forces extérieures :
푅 =
⎩⎪⎪⎪⎨
⎪⎪⎪⎧푅 = 퐹 = 0
푅 = 퐹 = 0
푅 = 퐹 = 0
2. Et trois équations liées au moment des forces par rapport point 푂:
푀(퐹 ) =푀 (퐹 ) = 0푀 (퐹 ) = 0푀 (퐹 ) = 0
Chapitre 2: Statique
Mécanique Rationnelle, L2(LMD) S. BAADJ 25
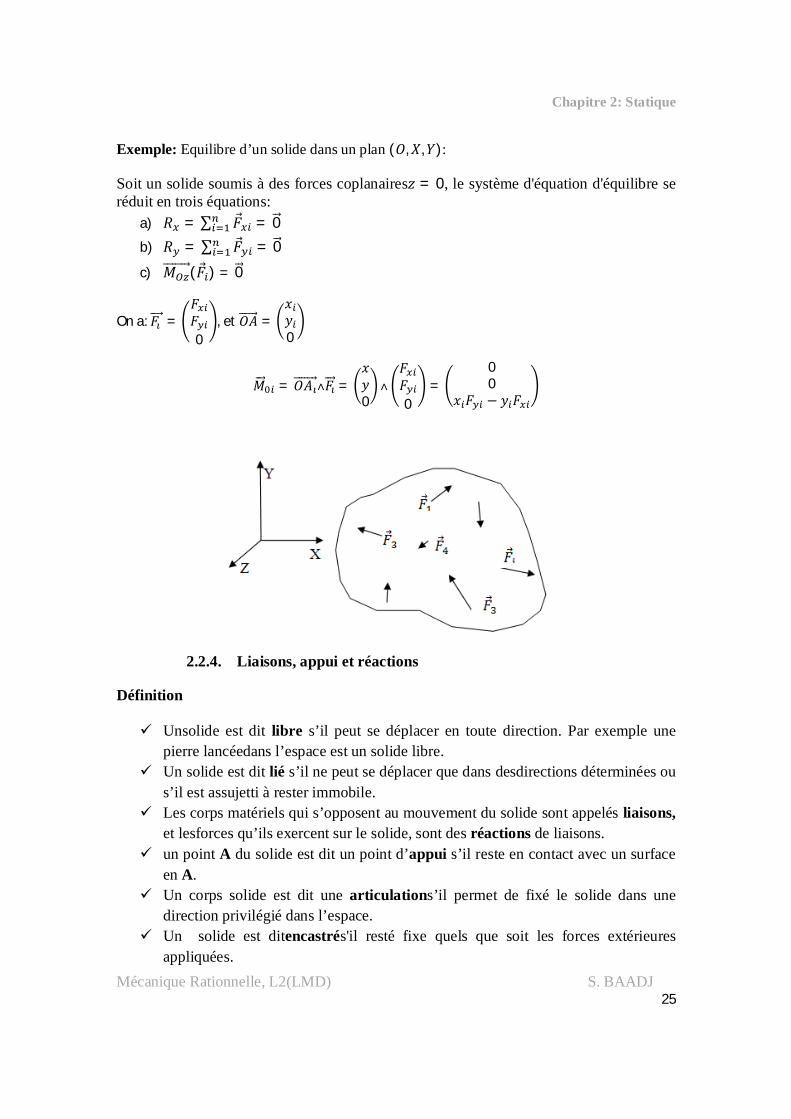
Exemple: Equilibre d’un solide dans un plan (푂,푋,푌): Soit un solide soumis à des forces coplanaires푧 = 0, le système d'équation d'équilibre se réduit en trois équations:
a) 푅 = ∑ 퐹 = 0
b) 푅 = ∑ 퐹 = 0
c) 푀 (퐹 ) = 0
On a: 퐹 =퐹퐹0
, et 푂퐴 =푥푦0
푀 = 푂퐴˄퐹 =푥푦0
˄퐹퐹0
=00
푥 퐹 − 푦 퐹
2.2.4. Liaisons, appui et réactions
Définition Unsolide est dit libre s’il peut se déplacer en toute direction. Par exemple une
pierre lancéedans l’espace est un solide libre. Un solide est dit lié s’il ne peut se déplacer que dans desdirections déterminées ou
s’il est assujetti à rester immobile. Les corps matériels qui s’opposent au mouvement du solide sont appelés liaisons,
et lesforces qu’ils exercent sur le solide, sont des réactions de liaisons. un point A du solide est dit un point d’appui s’il reste en contact avec un surface
en A. Un corps solide est dit une articulations’il permet de fixé le solide dans une
direction privilégié dans l’espace. Un solide est ditencastrés'il resté fixe quels que soit les forces extérieures
appliquées.

Chapitre 2: Statique
Mécanique Rationnelle, L2(LMD) S. BAADJ 26
a. Liaison ponctuelle (appui simple):
Le solide est en contact ponctuels avec d'autre solide ou surface (surface poli, rouleau cylindrique). Un appui simple permet de bloquer le mouvement suivant une direction et laissai deux degré de liberté. La réaction est donc dirigée suivant la normale (perpendiculaire au plan tangent de l’appui).
b. Liaison verrou, Articulation cylindrique (appui double): Le solide est en contact avec d'autre solide de surface cylindrique, Permet de bloquer le les translations dans deux directions. Le solide donc a une translation suivant l’axe 표푧, et une rotation autour du même axe. La réaction suivant l’axe de l’articulation 표푧 est nulle.
푅 = 푅 + 푅 , 푅 = 0
c. Liaison rotule (Articulation sphérique)
Le corps solide articulé par unearticulation sphérique (liaison rotule).
La réaction est à trois degré de liberté: 푅 = 푅 + 푅 + 푅
Chapitre 2: Statique
Mécanique Rationnelle, L2(LMD) S. BAADJ 27
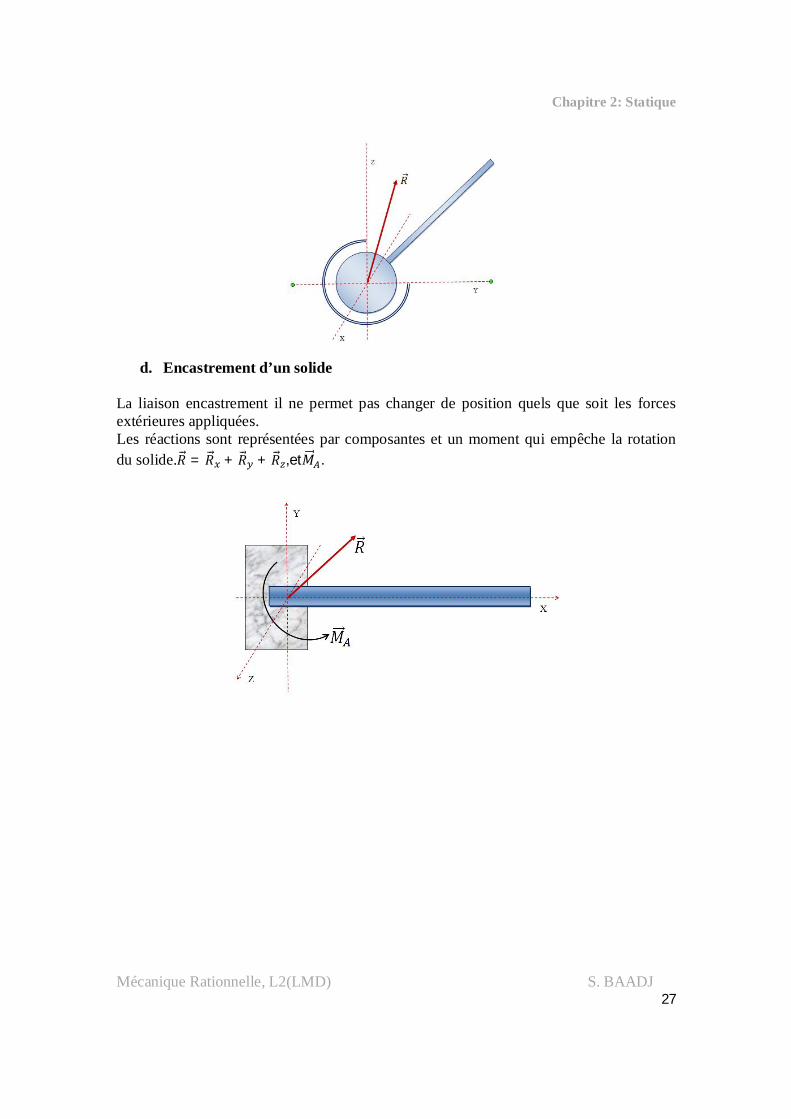
d. Encastrement d’un solide
La liaison encastrement il ne permet pas changer de position quels que soit les forces extérieures appliquées. Les réactions sont représentées par composantes et un moment qui empêche la rotation du solide.푅 = 푅 + 푅 + 푅 ,et푀 .
Chapitre 2: Statique
Mécanique Rationnelle, L2(LMD) S. BAADJ 28
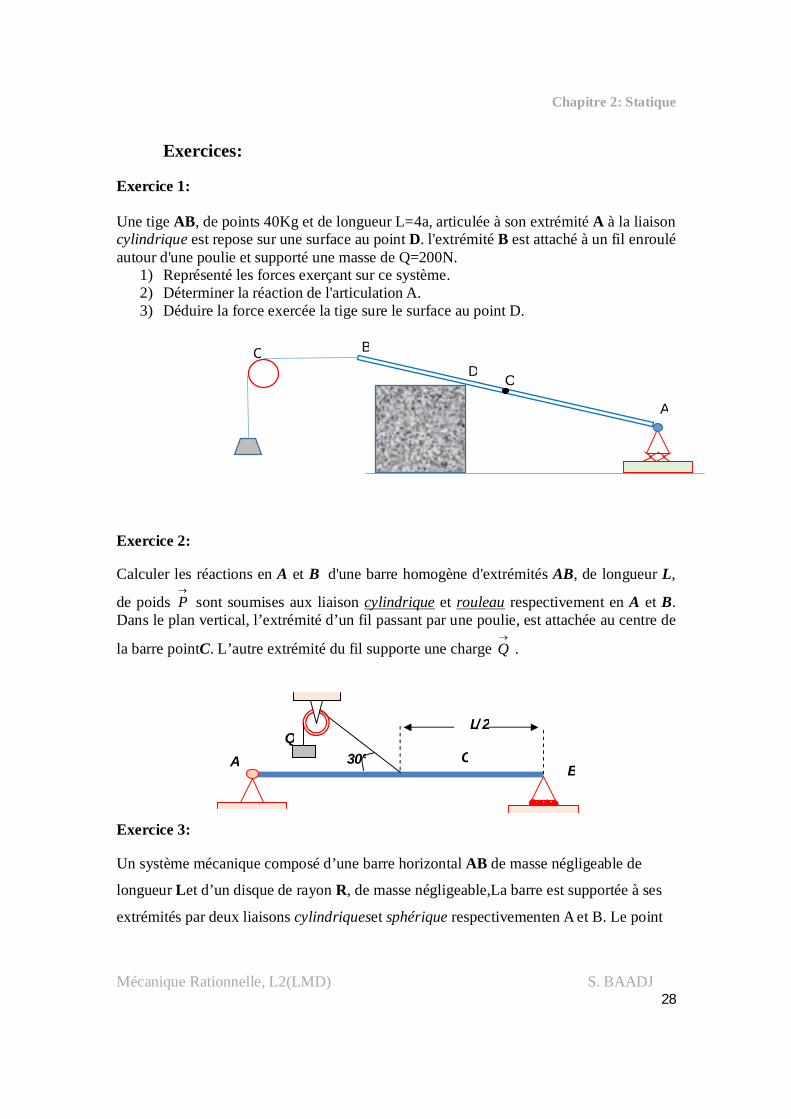
Exercices:
Exercice 1: Une tige AB, de points 40Kg et de longueur L=4a, articulée à son extrémité A à la liaison cylindrique est repose sur une surface au point D. l'extrémité B est attaché à un fil enroulé autour d'une poulie et supporté une masse de Q=200N.
1) Représenté les forces exerçant sur ce système. 2) Déterminer la réaction de l'articulation A. 3) Déduire la force exercée la tige sure le surface au point D.
Exercice 2:
Calculer les réactions en A et B d'une barre homogène d'extrémités AB, de longueur L,
de poids
P sont soumises aux liaison cylindrique et rouleau respectivement en A et B. Dans le plan vertical, l’extrémité d’un fil passant par une poulie, est attachée au centre de
la barre pointC. L’autre extrémité du fil supporte une charge
Q . Exercice 3:
Un système mécanique composé d’une barre horizontal AB de masse négligeable de
longueur Let d’un disque de rayon R, de masse négligeable,La barre est supportée à ses
extrémités par deux liaisons cylindriqueset sphérique respectivementen A et B. Le point
30° C B
A
Q L/2
D O
C B
A
Chapitre 2: Statique
Mécanique Rationnelle, L2(LMD) S. BAADJ 29
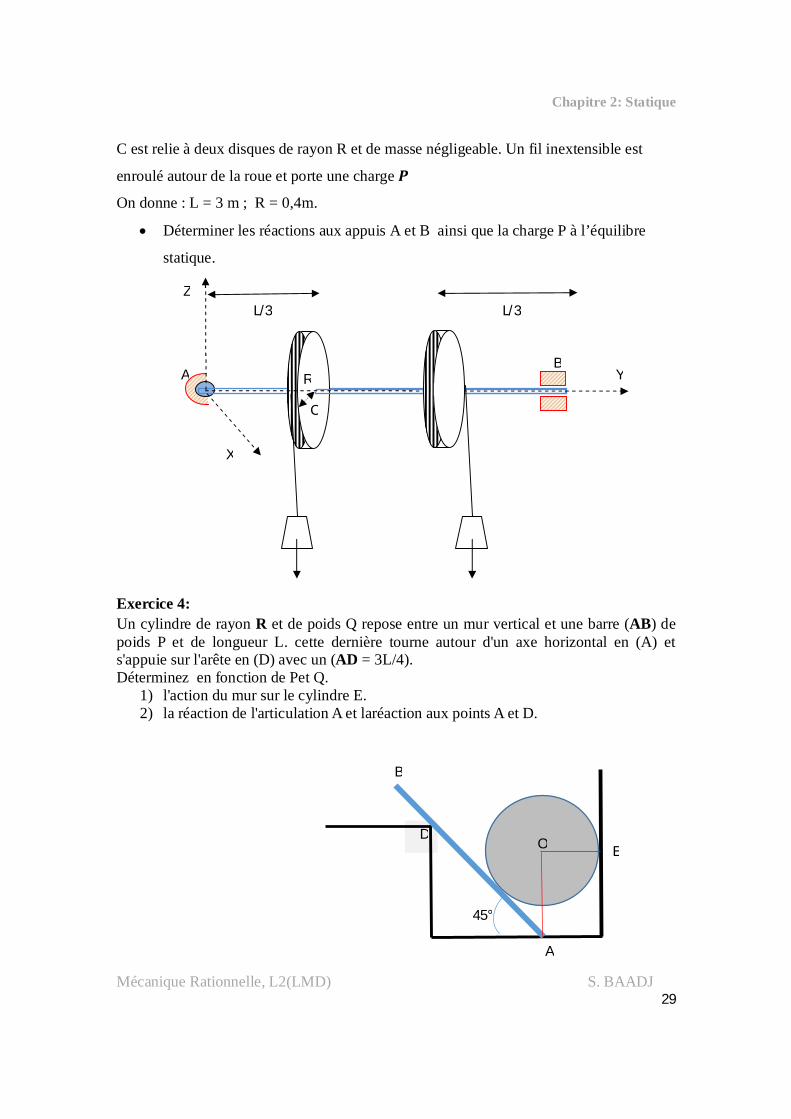
C est relie à deux disques de rayon R et de masse négligeable. Un fil inextensible est
enroulé autour de la roue et porte une charge 푷
On donne : L = 3 m ; R = 0,4m.
Déterminer les réactions aux appuis A et B ainsi que la charge P à l’équilibre
statique.
Exercice 4: Un cylindre de rayon R et de poids Q repose entre un mur vertical et une barre (AB) de poids P et de longueur L. cette dernière tourne autour d'un axe horizontal en (A) et s'appuie sur l'arête en (D) avec un (AD = 3L/4). Déterminez en fonction de Pet Q.
1) l'action du mur sur le cylindre E. 2) la réaction de l'articulation A et laréaction aux points A et D.
Z
B A
C
R
L/3 L/3
X
Y
45°
D E
B
A
O
Chapitre 3: La cinématique des solides 3.1. Rappels sur les quantités cinématiques pour un point matériel. 3.2. Cinématique du corps solide
3.2.1. Définitions: Solide rigide Vecteur vitesse de rotation 3.2.2. Champ des vitesses d'un solide en mouvement-Formule de Varignon: 3.2.3. Equiprojectivité du champ de vitesses d’un solide 3.2.4. Torseur cinématique
3.2.5. Champ des accélérations
3.3. Les lois de composition des mouvements 3.3.1. Composition des vitesses 3.3.2. Composition des accélérations 3.3.3. Compositiondes vecteurs rotations
3.4. Mouvements fondamentaux 3.4.1. Mouvement de translation: 3.4.2. Mouvement de rotation pur autour d’un axe: 3.4.3. Mouvement hélicoidal (translation+rotation) 3.4.4. Mouvement plansur plan
Chapitre 3: La cinématique des solides rigides
Mécanique Rationnelle, L2(LMD) S. BAADJ 31
M
z0
x0
y0
Chapitre 3: La cinématique des solides rigides
L’objectif de la cinématique du solide est de traité les quantités cinématique (position vitesse et accélération) de tous les points d'un solide en mouvement par rapport à un repère déterminé, sans tenir compte les causes qui ont provoqué ce mouvement.
3.1. Rappels sur les quantités cinématiques pour un point matériel.
a) Trajectoire
Soit M un point mobile dans un référentiel fixe푅 (푂, 푥 ,푦 , 푧 , 푡). Dans un intervalle de temps∆푡le point M décrit dans le repère 푅 une courbe appelée trajectoire.
b) Vitesse
Lavitesse moyenne푽풎d'un point entre les deux instants est défini par :
푉 = M(t)M(t+∆t)∆
= r(t+∆t)−r(t)∆
= ∆ ∆
Lavitesse instantanée풗c'est le vecteur tangent de la
trajectoire et dirigé vers le sens du mouvement, elle estdéfinie par:
푣 = lim∆ →
푉 = lim∆푟∆푡 =
푑푟푑푡
∆ →
c) Accélération
L'accélération moyenne휸풎 d'un point matériel entre 푡 et ∆푡 est définie par:
훾 =v(t + ∆t) − v(t)
∆푡 =∆푣∆푡
L'accélération instantanée휸 est définie par:
훾 = lim∆ →
훾 = lim∆푣∆푡 =
푑푣푑푡
∆ →
=푑²푟푑푡²
3.2. Cinématique du corps solide
Dans tout ce qui suit, 푹ퟎ(ퟎ, ퟎ, 풌ퟎ)est un référentiel absolu fixe et 푹( , , 풌)est un référentiel relatif lié au solide.
On note Ω푹/푹ퟎ le vecteur rotation instantanée de (푹) par rapport a (푹ퟎ).
v

Chapitre 3: La cinématique des solides rigides
Mécanique Rationnelle, L2(LMD) S. BAADJ 32
3.2.1. Définitions:
Solide rigide
Un solide est dit rigide est un solide indéformable, mathématique sa signifie que la distance entre n'importe quel deux points de celui-ci reste invariable au court du temps :
퐴퐵² = 푐푡푒
Or 퐴퐵
= 0
Vecteur vitesse de rotation
Soit le repère(푹) en mouvement de rotation autour de l’axe 푧par rapport au repère(푹ퟎ), par une angle 휃 = (푥 , 푥) = (푦 , 푦).
On note Ω푹/푹ퟎ le vecteur vitesse de rotation du repère (푹) par rapport au repère (푹ퟎ) qui est perpendiculaire au plan de rotation.
Ω푹/푹ퟎ =풅휽풅풕 . 푘
Dans le cas générale si le mouvement de rotation du repère (푹) par rapport au repère (푹ퟎ)est constitué de plusieurs rotations élémentaires d’angle 휃 appelé les angles d'Eulerautour lesl’axes(푒 ). Alors:
Ω푹/푹ퟎ =풅휃풅풕 . 푒

Chapitre 3: La cinématique des solides rigides
Mécanique Rationnelle, L2(LMD) S. BAADJ 33
푅 (횤 , 횥 , 푘 )
3.2.2. Champ des vitesses d'un solide en mouvement-Formule de Varignon:
On utilise l’expression des vitessesdes points 퐴 et 퐵 par rapport à 푅 : 푽푨/푹ퟎ = 푽푨/푹 + Ω푹/푹ퟎ˄푶푨 푽푩/푹ퟎ = 푽푩/푹 + Ω푹/푹ퟎ˄푶푩 D’où: 푽푩/푹ퟎ − 푽푨/푹ퟎ = 푽푩/푹 − 푽푨/푹 + Ω푹/푹ퟎ˄(푶푩 − 푶푨) Or: les points 퐴 et 퐵sont fixe dans le solide(푅),implique que leur vitesse par rapport à 푅 sont égaux:푽푩/푹 − 푽푨/푹 = ퟎ EtΩ푹/푹ퟎ = Ω푺/푹ퟎcar le référentiel R et attaché au solide S. Par conséquent :
푽푩/푹ퟎ = 푽푨/푹ퟎ + Ω푺/푹ퟎ˄푨푩
Remarque: C’est la formule de champ des vitesses d’un solide rigide il montre que c'est
un champ antisymétrique. Ω푺/푹ퟎ ne dépend pas des points A ou B. (c'est invariant) 푽푩/푹ퟎse déduit de la vitesse 푽푨/푹ퟎpar la relation de l'équiprojectivité.
3.2.3. Equiprojectivité du champ de vitesses d’un solide
Pour un solide rigide on à 퐴퐵
= 0
D’où퐴퐵 = 푶푩 − 푶푨
푅(횤, 횥, 푘) 푅 (횤 , 횥 , 푘 )
B
A
퐵
퐴
푂

Chapitre 3: La cinématique des solides rigides
Mécanique Rationnelle, L2(LMD) S. BAADJ 34
퐴퐵푑푡 =
푂퐵푑푡 −
푂퐴푑푡
On obtient ainsi l’égalité퐴퐵. 푉 / = 퐴퐵. 푉 /
Cette relation représentela propriété d'équiprojectivité du champ des vitesses du solide.
Elle permettra de déterminer la vitesse au point 퐵 à partir de la vitesse au point 퐴.
3.2.4. Torseur cinématique
Le champ des vitesses d’un solide rigide S en mouvement de rotation par rapport à un repère 푅 est représenté par un torseur cinématique et noté: 흊푺/푹ퟎ 푨
Ces éléments de réduction est définie par: La résultante de ce torseur, notée: Ω푺/푹ퟎ Et le moment cinématiqueau point A:푽푨/푹ퟎ
휐 / =Ω푺/푹ퟎ
푽푨/푹ퟎ
Le vecteur Ω푺/푹ퟎest le vecteur de rotation instantané du solide (S) par rapport au repère 푅 et 푽푨/푹ퟎest le vecteur vitesse du point A au solide (S)par rapport au repère푅 . 3.2.5. Champ des accélérations Par la dérivation de l'équation du champ de vitesseon peut associer un champ d'accélération par rapport à 푅 noté 훾/ : Sachant que:
푉
푉
퐴
퐵

Chapitre 3: La cinématique des solides rigides
Mécanique Rationnelle, L2(LMD) S. BAADJ 35
푽푩/푹ퟎ = 푽푨/푹ퟎ + Ω푺/푹ퟎ˄푨푩 푑푽푩/푹ퟎ푑푡 =
푑푽푨/푹ퟎ푑푡 +
푑푨푩푑푡 ˄Ω푺/푹ퟎ + 푨푩˄
푑Ω푺/푹ퟎ푑푡
Or: 푑푨푩푑푡 =
푑푨푩푑푡 + Ω푺/푹ퟎ˄푨푩
Et 푨푩 = 0
푑푽푩/푹ퟎ푑푡 =
푑푽푨/푹ퟎ푑푡 +
푑Ω푺/푹ퟎ푑푡 ˄푨푩 + (Ω푺/푹ퟎ˄푨푩)˄Ω푺/푹ퟎ
휸푩/푹ퟎ = 휸푨/푹ퟎ + (Ω푺/푹ퟎ˄푨푩)˄Ω푺/푹ퟎ + 푨푩˄푑Ω푺/푹ퟎ푑푡
C'est la loi de distribution des accélérations (Formule de Rivals) dans un corps solide rigide. Contrairement au champ de vitesse, on ne peut pas trouver un torseur pour le champ des accélérations. 3.3. Les lois de composition des mouvements Nous allons étudier dans ce qui suite les lois de compositions des mouvements qui permettra de passer d’un repère à un autre.
3.3.1. Composition des vitesses
Soit un solide (S), son mouvement est connu par rapport à un repère 푅.
Tel que:
푉 / =
= 푉 (푀), Sa vitesse absolu par rapport à 푅 .
푉 / =
= 푉 (푀), Sa vitesse relative par rapport à 푅.
D’où 푂 푀 = 푂 푂 + 푂푀
푉 / =푑(푂 푂 + 푂푀)
푑푡 =푑푂 푂푑푡 +
푑푂푀푑푡
푉 / =푑푂 푂푑푡 +
푑푂푀푑푡 + Ω푺/푹ퟎ˄푂푀
푉 / = 푉 / + 푉 / + Ω푺/푹ퟎ˄푂푀
푉 (푀) = 푉 (푀) + 푉 / + Ω푹/푹ퟎ˄푂푀
Chapitre 3: La cinématique des solides rigides
Mécanique Rationnelle, L2(LMD) S. BAADJ 36
On a alors: 푉 (푀) = 푉 (푀) + 푉 (푀)
Avec 푉 (푀) = 푉 / + Ω푹/푹ퟎ˄푂푀c'est la vitesse d'entrainement du point M.
3.3.2. Composition des accélérations
On reprend un solide (S)en mouvement par rapport à 푅.
Sachant que l'accélération absolu d'un point M est défini par:
훾 =푑²푂0푀푑푡² 푅0
=푑푉푀/푅0
푑푡 푅0
On a alors훾 /푅0 =푑푉푀
푅0푑푡 푅0
=푑(푉0/푅0+푉푀
푅+Ω푺
푹ퟎ˄푂푀)
푑푡 푅0
훾 /푅0 =푑푉0/푅0
푑푡 푅0
+푑푉푀
푅0
푑푡 푅0
+푑(Ω푺
푹ퟎ˄푂푀)
푑푡 푅0
훾 /푅0 = 훾푅0
푑푉푀푅
푑푡 푅0
+푑Ω푺
푹ퟎ푑푡 푅0
˄푂푀 + Ω푺푹ퟎ˄푑푂푀푑푡 푅0
훾 /푅0 = 훾푅0
푑푉푀푅
푑푡 푅+ Ω푺
푹ퟎ˄푉푀
푅+푑Ω푺
푹ퟎ푑푡 푅0
˄푂푀
+ Ω푺푹ퟎ˄
푑푂푀푑푡 푅
+ Ω푺푹ퟎ˄푑푂푀푑푡 푅
Ce qui donne
훾 /푅0 = 훾푅0
+ 훾푅
+ ퟐ Ω푺푹ퟎ˄푉푀
푅+푑Ω푺
푹ퟎ푑푡 푅0
˄푂푀 + Ω푺푹ퟎ˄ Ω푺
푹ퟎ˄푉푀
푅
Et finalement on a
훾 /푅0 = 훾 + 훾 + 훾
Avec:
훾 = 훾푅c'est l'accélération relatived'un point M par rapport à un observateur
lie au repaire푅.
Chapitre 3: La cinématique des solides rigides
Mécanique Rationnelle, L2(LMD) S. BAADJ 37
푹ퟎ(ퟎ, ퟎ, 풌ퟎ)
푹( , , 풌)
훾 = 훾푅0
+푑Ω푺
푹ퟎ푑푡 푅0
˄푂푀 + Ω푺푹ퟎ˄ Ω푺
푹ퟎ˄푉푀
푅c'est l'accélération
d'entrainement du point M.
훾 = ퟐ Ω푺푹ퟎ˄푉푀
푅est ditl'accélérationde Coriolis.
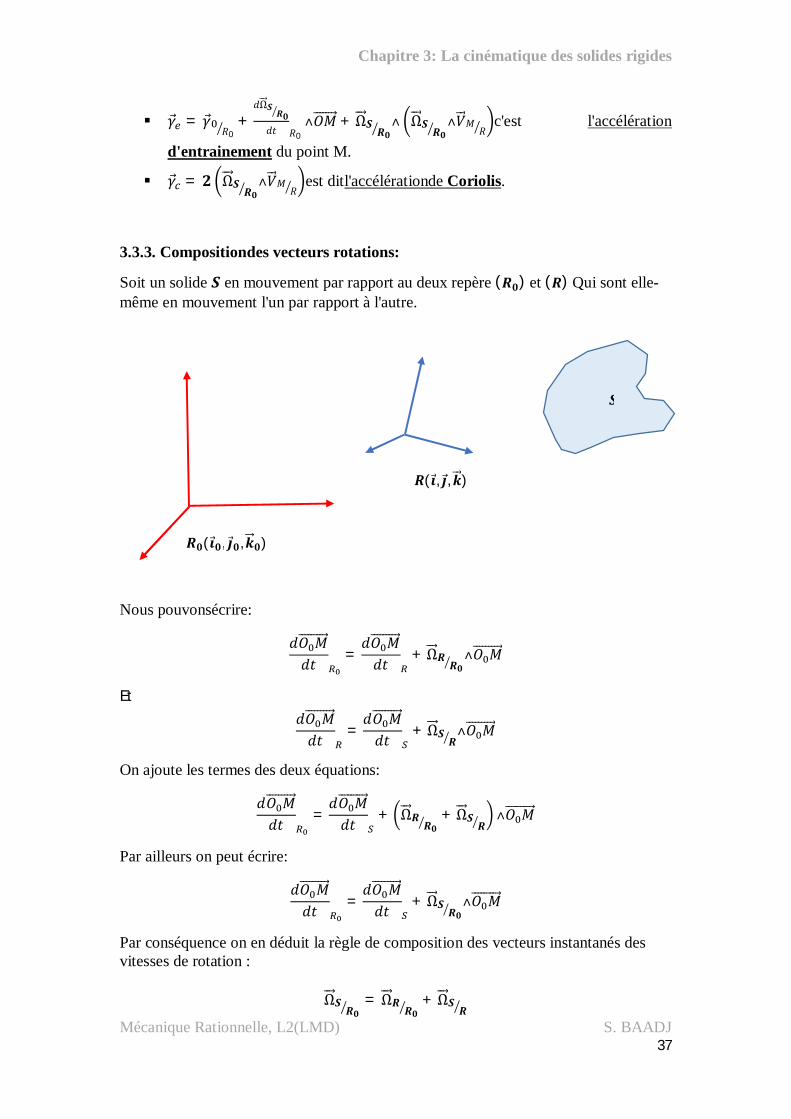
3.3.3. Compositiondes vecteurs rotations:
Soit un solide 푺 en mouvement par rapport au deux repère (푹ퟎ) et (푹) Qui sont elle-même en mouvement l'un par rapport à l'autre.
Nous pouvonsécrire:
푑푂 푀푑푡 =
푑푂 푀푑푡 + Ω푹
푹ퟎ˄푂 푀
Et 푑푂 푀푑푡 =
푑푂 푀푑푡 + Ω푺
푹˄푂 푀
On ajoute les termes des deux équations:
푑푂 푀푑푡 =
푑푂 푀푑푡 + Ω푹
푹ퟎ+ Ω푺
푹˄푂 푀
Par ailleurs on peut écrire:
푑푂 푀푑푡 =
푑푂 푀푑푡 + Ω푺
푹ퟎ˄푂 푀
Par conséquence on en déduit la règle de composition des vecteurs instantanés des vitesses de rotation :
Ω푺푹ퟎ
= Ω푹푹ퟎ
+ Ω푺푹
푺
Chapitre 3: La cinématique des solides rigides
Mécanique Rationnelle, L2(LMD) S. BAADJ 38
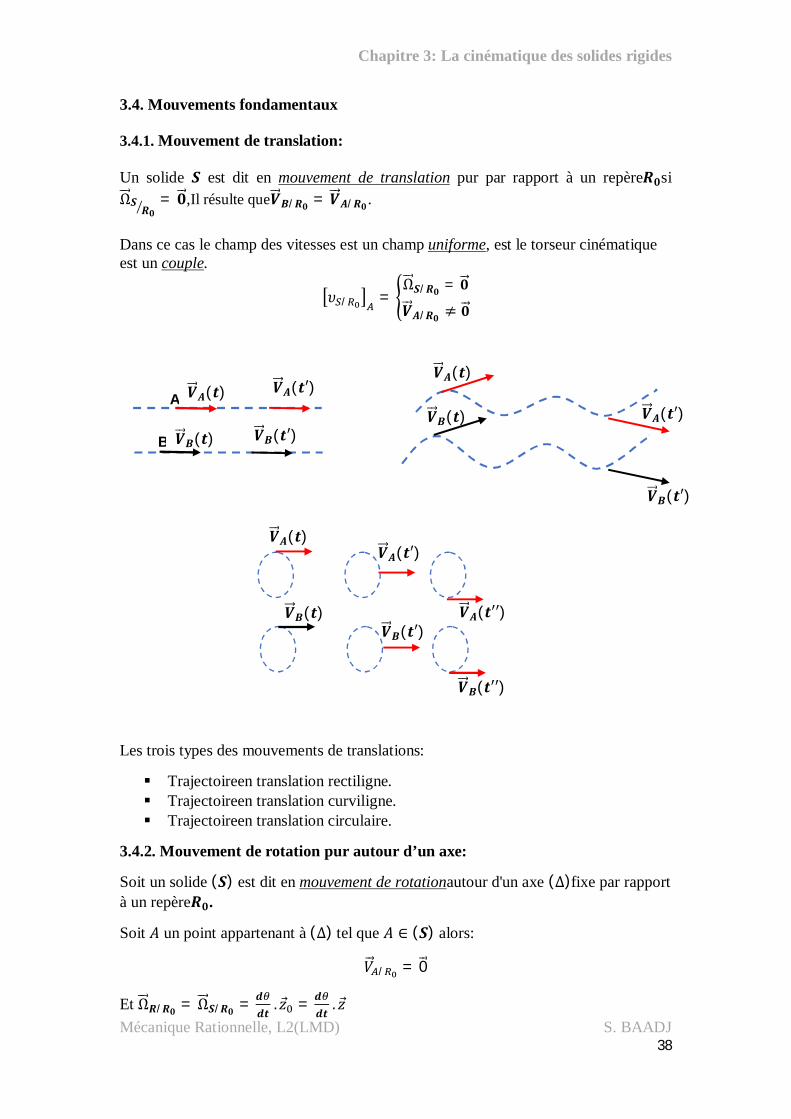
3.4. Mouvements fondamentaux 3.4.1. Mouvement de translation: Un solide 푺 est dit en mouvement de translation pur par rapport à un repère푹ퟎsi Ω푺
푹ퟎ= ퟎ,Il résulte que푽푩/푹ퟎ = 푽푨/푹ퟎ.
Dans ce cas le champ des vitesses est un champ uniforme, est le torseur cinématique est un couple.
휐 / =Ω푺/푹ퟎ = ퟎ
푽푨/푹ퟎ ≠ ퟎ
Les trois types des mouvements de translations:
Trajectoireen translation rectiligne. Trajectoireen translation curviligne. Trajectoireen translation circulaire.
3.4.2. Mouvement de rotation pur autour d’un axe:
Soit un solide (푺) est dit en mouvement de rotationautour d'un axe (∆)fixe par rapport à un repère푹ퟎ.
Soit 퐴 un point appartenant à (∆) tel que 퐴 ∈ (푺) alors:
푉 / = 0
Et Ω푹/푹ퟎ = Ω푺/푹ퟎ = 풅풅풕
. 푧 = 풅풅풕
. 푧
A
B
푽푨(풕)
푽푩(풕)
푽푨(풕′)
푽푩(풕′)
푽푨(풕)
푽푩(풕) 푽푨(풕′)
푽푩(풕′)
푽푨(풕)
푽푩(풕)
푽푨(풕′)
푽푩(풕′)
푽푩(풕′′)
푽푨(풕′′)
Chapitre 3: La cinématique des solides rigides
Mécanique Rationnelle, L2(LMD) S. BAADJ 39
A M
z0=z
x0
y0
x
y
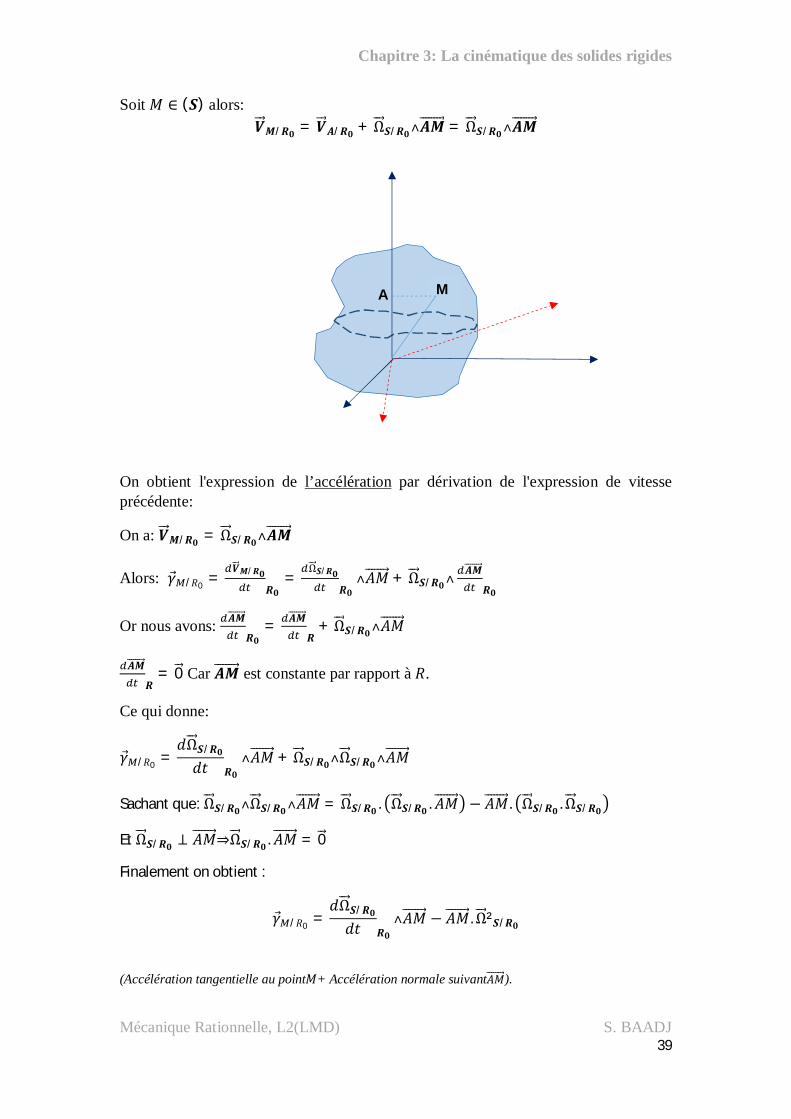
Soit 푀 ∈ (푺) alors: 푽푴/푹ퟎ = 푽푨/푹ퟎ + Ω푺/푹ퟎ˄푨푴 = Ω푺/푹ퟎ˄푨푴
On obtient l'expression de l’accélération par dérivation de l'expression de vitesse précédente:
On a: 푽푴/푹ퟎ = Ω푺/푹ퟎ˄푨푴
Alors: 훾 /푅0 =푽푴/푹ퟎ
푹ퟎ=
Ω푺/푹ퟎ
푹ퟎ˄퐴푀 + Ω푺/푹ퟎ˄
푨푴
푹ퟎ
Or nous avons: 푨푴
푹ퟎ= 푨푴
푹+ Ω푺/푹ퟎ˄퐴푀
푨푴
푹= 0 Car 푨푴 est constante par rapport à 푅.
Ce qui donne:
훾 /푅0 =푑Ω푺/푹ퟎ푑푡 푹ퟎ
˄퐴푀 + Ω푺/푹ퟎ˄Ω푺/푹ퟎ˄퐴푀
Sachant que: Ω푺/푹ퟎ˄Ω푺/푹ퟎ˄퐴푀 = Ω푺/푹ퟎ . Ω푺/푹ퟎ .퐴푀 − 퐴푀. Ω푺/푹ퟎ . Ω푺/푹ퟎ
Et Ω푺/푹ퟎ ⊥ 퐴푀⇒Ω푺/푹ퟎ .퐴푀 = 0
Finalement on obtient :
훾 /푅0 =푑Ω푺/푹ퟎ푑푡 푹ퟎ
˄퐴푀 − 퐴푀. Ω²푺/푹ퟎ
(Accélération tangentielle au point푀+ Accélération normale suivant퐴푀).
Chapitre 3: La cinématique des solides rigides
Mécanique Rationnelle, L2(LMD) S. BAADJ 40
M A
P O
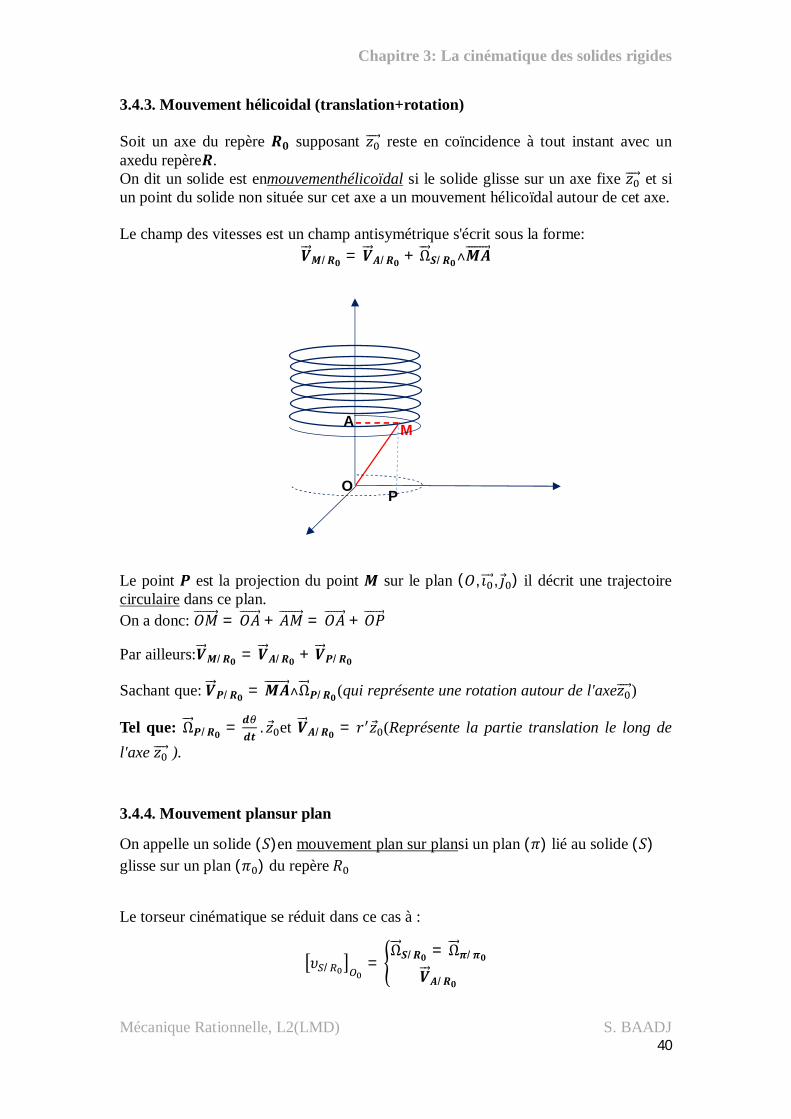
3.4.3. Mouvement hélicoidal (translation+rotation) Soit un axe du repère 푹ퟎ supposant 푧 reste en coïncidence à tout instant avec un axedu repère푹. On dit un solide est enmouvementhélicoïdal si le solide glisse sur un axe fixe 푧 et si un point du solide non située sur cet axe a un mouvement hélicoïdal autour de cet axe. Le champ des vitesses est un champ antisymétrique s'écrit sous la forme:
푽푴/푹ퟎ = 푽푨/푹ퟎ + Ω푺/푹ퟎ˄푴푨
Le point 푷 est la projection du point 푴 sur le plan (푂, 횤, 횥 ) il décrit une trajectoire circulaire dans ce plan. On a donc: 푂푀 = 푂퐴 + 퐴푀 = 푂퐴 + 푂푃
Par ailleurs:푽푴/푹ퟎ = 푽푨/푹ퟎ + 푽푷/푹ퟎ
Sachant que: 푽푷/푹ퟎ = 푴푨˄Ω푷/푹ퟎ(qui représente une rotation autour de l'axe푧)
Tel que: Ω푷/푹ퟎ = 풅풅풕
. 푧 et 푽푨/푹ퟎ = 푟 푧 (Représente la partie translation le long de l'axe 푧 ).
3.4.4. Mouvement plansur plan
On appelle un solide (푆)en mouvement plan sur plansi un plan (휋) lié au solide(푆) glisse sur un plan (휋 ) du repère 푅
Le torseur cinématique se réduit dans ce cas à :
휐 / =Ω푺/푹ퟎ = Ω흅/흅ퟎ
푽푨/푹ퟎ

Chapitre 3: La cinématique des solides rigides
Mécanique Rationnelle, L2(LMD) S. BAADJ 41
푹ퟎ(ퟎ, ퟎ, 풌ퟎ)
Avec Ω푺/푹ퟎ = Ω흅/흅ퟎ = 풅풅풕
. 푧 si par exemple(휋)est le plan (푂, 횤, 횥) qui reste dans ce cas confonduavec le plan(푂, 횤 , 횥 ).
La formule de transport pour le champ de vitesse de deux points du plan (π) A et M :
푽푨/푹ퟎ = 푽푴/푹ퟎ + Ω흅/흅ퟎ˄푨푴
Tel que 푽푨/푹ퟎ 풆풕푽푴/푹ퟎ appartenant au plan (휋) et Ω흅/흅ퟎest orthogonal à (휋).
Remarque:Il existe un point 푰unique varie au cours du temps.appelécentre instantané de rotation(CIR) du mouvement de S parrapport à R tel que :푽푰흐푺/푹ퟎ = 0
Figure: Centre Instantané de Rotation (CIR)
On écrit: 푽푨
푹ퟎ= 푽푰/푹ퟎ + Ω푺/푹ퟎ˄푰푨
= ퟎ + Ω푺/푹ퟎ˄푰푨
A partir de l'expression de la vitesse 푉 / on peut déduire que le vecteur position퐼퐴est perpendiculaire à la vitesse, par conséquence on peut trouver la position du CIR par l'intersection des perpendiculaire du deux vitesse quelconque et connu.
I
Chapitre 3: La cinématique des solides rigides
Mécanique Rationnelle, L2(LMD) S. BAADJ 42
ퟐ 푨
ퟎ
ퟏ
풌ퟎ
ퟎ
ퟏ
ퟏ
풌ퟎ 풌ퟐ
푩 푰
휽
흋
Définitions: On appelle basela trajectoire de CIR(풍풆풑풐풊풏풕풄)dans le repère 푅 . On appelle roulantela trajectoire de CIR(풍풆풑풐풊풏풕풄)dans le repère 푅.
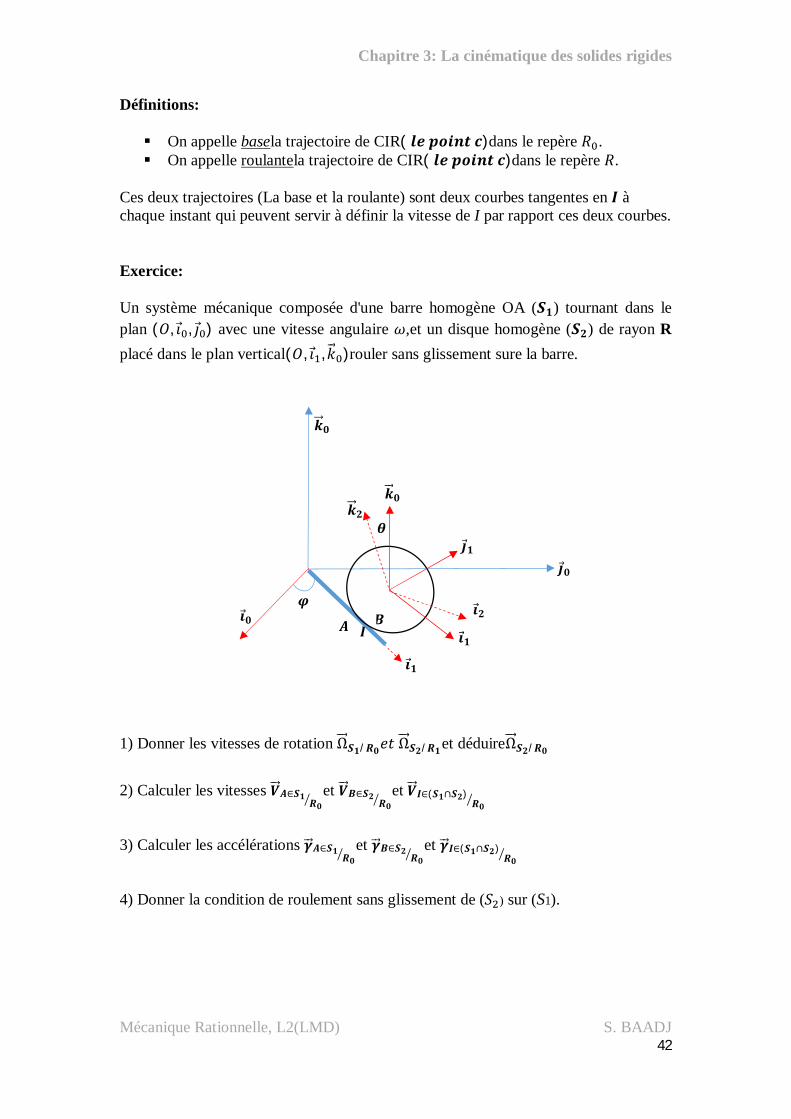
Ces deux trajectoires (La base et la roulante) sont deux courbes tangentes en 푰 à chaque instant qui peuvent servir à définir la vitesse de I par rapport ces deux courbes. Exercice: Un système mécanique composée d'une barre homogène OA (푺ퟏ) tournant dans le plan (푂, 횤 , 횥 ) avec une vitesse angulaire 휔,et un disque homogène (푺ퟐ) de rayon R placé dans le plan vertical(푂, 횤 , 푘 )rouler sans glissement sure la barre.
1) Donner les vitesses de rotation Ω푺ퟏ/푹ퟎ푒푡Ω푺ퟐ/푹ퟏet déduireΩ푺ퟐ/푹ퟎ
2) Calculer les vitesses 푽푨∈푺ퟏ푹ퟎ
et 푽푩∈푺ퟐ푹ퟎ
et 푽푰∈(푺ퟏ∩푺ퟐ)푹ퟎ
3) Calculer les accélérations 휸푨∈푺ퟏ푹ퟎ
et 휸푩∈푺ퟐ푹ퟎ
et 휸푰∈(푺ퟏ∩푺ퟐ)푹ퟎ
4) Donner la condition de roulement sans glissement de (푆 ) sur (S1).
Chapitre 4
Géométrie de masse. 4.1 Masse d’un système matériel
4.1.1 Système continu 4.1.2. Système discret
4.2 Formulation intégrale du centre de masse 4.2.1. Définitions (cas linéaire, surfacique et volumique) 4.2.2 Formulation discrète du centre de masse 4.2.3 Théorèmes de GULDIN
4.3. Moment et produit d’inertie de solides 4.4. Tenseur d’inertie d’un solide
4.4.1 Cas particuliers 4.4.2 Axes Principaux d’inertie
4.5 Théorème d’Huygens 4.6 Moment d’inertie de solides par rapport à un axe quelconque.
Chapitre 4 : Géométrie de masse
Mécanique Rationnelle, L2(LMD) S. BAADJ 44
Chapitre 4 : Géométrie de masse. 4.1. Masse d’un système matériel :
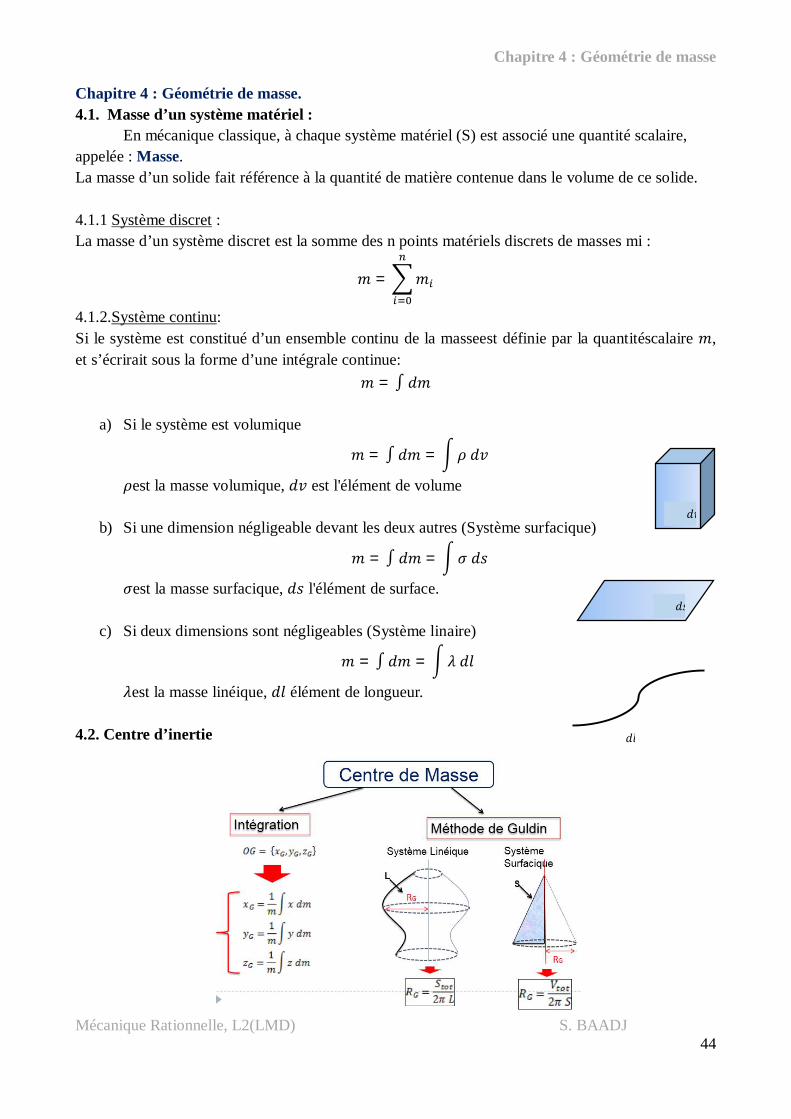
En mécanique classique, à chaque système matériel (S) est associé une quantité scalaire, appelée : Masse. La masse d’un solide fait référence à la quantité de matière contenue dans le volume de ce solide. 4.1.1 Système discret : La masse d’un système discret est la somme des n points matériels discrets de masses mi :
푚 = 푚
4.1.2.Système continu: Si le système est constitué d’un ensemble continu de la masseest définie par la quantitéscalaire 푚, et s’écrirait sous la forme d’une intégrale continue:
푚 = ∫ 푑푚
a) Si le système est volumique
푚 = ∫ 푑푚 = 휌푑푣
휌est la masse volumique, 푑푣 est l'élément de volume
b) Si une dimension négligeable devant les deux autres (Système surfacique)
푚 = ∫ 푑푚 = 휎푑푠
휎est la masse surfacique, 푑푠 l'élément de surface.
c) Si deux dimensions sont négligeables (Système linaire)
푚 = ∫ 푑푚 = 휆푑푙
휆est la masse linéique, 푑푙 élément de longueur.
4.2. Centre d’inertie
푑푣
푑푠
푑푙

Chapitre 4 : Géométrie de masse
Mécanique Rationnelle, L2(LMD) S. BAADJ 45
Cas d’un système composé: Si le système est complexe: composé de plusieurs élément (훥푖). On détermine d’abord le centre d’inertie de chaque élément (훥푖) du système au point 푮풊 ,puis on détermine le centre d’inertie 푶푮 du système comme barycentre des points 푮풊 .
푂퐺 =∑ 푚 푂퐺∑ 푚
Exemple:
푂퐺 = 푥 ,푦
푋 =푋 푚 + 푋 푚 + 푋 푚
푚 + 푚 + 푚 푌 = 0
Exemple 2:
Pendule complexe, composé de deux masses 푚 , 푚 et une fil de masse négligeable.
Le centre de masse: 푂퐺 = 푥 ,푦 푋 = 0et푌 =
On a :
푌 = 푦 − 푙et푌 = 푦
Remplaçant dans l’équation du centre de masse, nous obtenons:
푌 =(푦 − 푙).푚 + 푦.푚
푚 + 푚
푌 =(푚 + 푚 )푦 + 푚 . 푙
푚 + 푚
풀푮 = 풚 −풎 . 풍
풎 + 풎

Chapitre 4 : Géométrie de masse
Mécanique Rationnelle, L2(LMD) S. BAADJ 46
4.2.1. Méthode d’intégration: Il s’agit du point « moyen » du système, qu’on appelle aussi barycentre, ou centre de masse
défini par la relation: ∫ 퐺푃푑푚 = 0
P est un point du solide et le O est le centre du repère avec:
푂푃 = 푥횤 + 푦횥 + 푧푘 et푂퐺 = 푥 횤+ 푦 횥 + 푧 푘 Nous pouvons écrire: 푂푃 = 푂퐺 + 푃퐺 ∫ 푂푃푑푚 = ∫ 푂퐺푑푚 + ∫ 푃퐺푑푚 ∫ 푂푃푑푚 = ∫ 푂퐺푑푚
∫
∫= 푂퐺
푂퐺 = ∫ 푂푃푑푚
Nous obtenons : 푂퐺 = 푥 ,푦 , 푧 =>
⎩⎪⎨
⎪⎧푥 = ∫ 푥. 푑푚
푦 = ∫ 푦.푑푚
푧 = ∫ 푧. 푑푚
Exemple 1:Surface circulaire homogène plane, de rayon R, π/6<α<π/2 푑푠 = 푟푑휃푑푟, 0 < 푟 < 푅et < 휃 <
푑푚 = 휎. 푑푠, =>푚 = 휎. 푠 푥 = 푟푐표푠휃et푦 = 푟푠푖푛휃
D’où : 푠 = ∫푑푠 = ∫ 푟푑푟 ∫ 푑휃// = − = ²
Et: 푚 = 휎. 푆
Les coordonnées du centre de masse sont :
푥 =1푚
푥푑푚
=1² 푟²푑푟 cos 휃 푑휃
/
/
=6푅²휋
푅3− 1−
12
=푅휋
Y
x
π/6
0
G
P

Chapitre 4 : Géométrie de masse
Mécanique Rationnelle, L2(LMD) S. BAADJ 47
푦 =1푚
푦
Finalement le centre d’inertie du rectangle est:푂퐺 = 푅휋
, 푅휋 √3
Exemple 2: On calcule le centre d’inertie des trois solides (rectangle, quart de disque, disque) séparément puis on déduit le centre d’inertie du solide entier. 1. Centre d’inertie du rectangle: Masse du rectangle: 푑푚 = 휎푑푠,
푑푚 = 휎푑푥.푑푦, avec0 ≤ 푥 ≤ 푎0 ≤ 푦 ≤ 푏
푚 = 휎푎. 푏
Donc :
푥 =1푚 ∫ 푥푑푚 =
휎푚 푥푑푥 푑푦 =
휎휎. 푎. 푏
푎²2 .푏 =
푎2
푦 =1푚 ∫ 푦푑푚 =
휎푚 푑푥 푦.푑푦 =
휎휎.푎. 푏 푎.
푏²2 =
푏2
Le centre d’inertie du rectangle est:푂퐺 ,
2. Centre d’inertie du quart de disque :
On fait une translation de repère de ‘a’ suivant l’axe (Ox) puis on calcule les coordonnés du centre de masse: L’élément de masse est définie par:푑푚 = 휎. 푟푑푟.푑휃
Avec0 ≤ 푟 ≤ 푅0 ≤ 푦 ≤ et 푅 = 2푎on obtient : 푚 = . ²
Les coordonnées du centre de masse seront données par :
푥 =1푚
푥푑푚 = 푎 +1 . ² 푟²푑푟
/
= 푎 +8푎3휋
푦 =1푚
푦

Chapitre 4 : Géométrie de masse
Mécanique Rationnelle, L2(LMD) S. BAADJ 48
Est donc le centre d’inertie du quart de disque est:푂퐺 푎 + ,
3. Centre d’inertie du disque : R=a/2
La masse du disque est définie par: 푚 = 휎 .푎² Les coordonnées du centre de masse sont :
푥 = 푎 +푎2 =
3푎2
푦 =푎2
Donc : 푂퐺 ,
Sachant que : 푚 = 휎푎. 푏,
푚 = . ² ,
푚 = 휎휋4 . 푎²
Et 푂퐺 , , 푂퐺 푎 + , , 푂퐺 ,
Les coordonnées du centre d’inertie du solide qui est un système composé seront données par:
푋 =푋 푚 + 푋 푚 − 푋 푚
푚 + 푚 −푚 =+ 푎(1 + − )
+ 1−
푌 =푌 푚 + 푌 푚 − 푌 푚
푚 + 푚 −푚 =² + − ²
푏 + 1− 푎
4.2.2. Méthode de Guldin :
1ie Théorème de Guldin:
Elle consiste à faire tourner un arc de courbe de longueur L autour d’un axe Ox, Oy. La rotation de l’arc engendre une surface de révolution dont l’aire est égale au produit de la longueur de l’arc L par la longueur de la circonférence décrite par le centre d’inertie G de L.
푆 = 2휋. 퐿.푅
Si la rotation ce faire autour de l’axe 푶풚, nous aurons:푥 = /

Chapitre 4 : Géométrie de masse
Mécanique Rationnelle, L2(LMD) S. BAADJ 49
Si la rotation ce faire autour de l’axe 푶풙, nous aurons:푦 = /
2eme Théorème de Guldin:
Le 2eme théorème consiste à faire tourner des solides surfaciquesautour d’un axe 표푥,표푦. La rotation d’une surface engendre un volume de révolution est égale au produit de la surface du solide par la longueur de la circonférence décrite par le centre d’inertie G de L.
푉 = 2휋. 푆.푅
Si la rotation ce faire autour de l’axe Oy, nous aurons:푥 = /
Si la rotation ce faire autour de l’axe Ox, nous aurons:푦 = /
Exemple: Trouver le centre d’inertie d’un demi-cercle.
Solution: 푶푮 Se trouve sur l’axe oy donc par raison de symétrie, 푥 = 0
Puisque le solide est linaire (cercle) on applique le 1er théorème de Guldin: Talque la rotation du demi-cercle par rapport au l’axe (ox) donnons une sphère creuse de surface푆 è / tel que 푳 est le périmètre du demi-cercle 퐿 = 휋푅.
D’où 푆 è / = 4휋푅²
Chapitre 4 : Géométrie de masse
Mécanique Rationnelle, L2(LMD) S. BAADJ 50
Nous obtenons alors: 푦 = / = ².
=
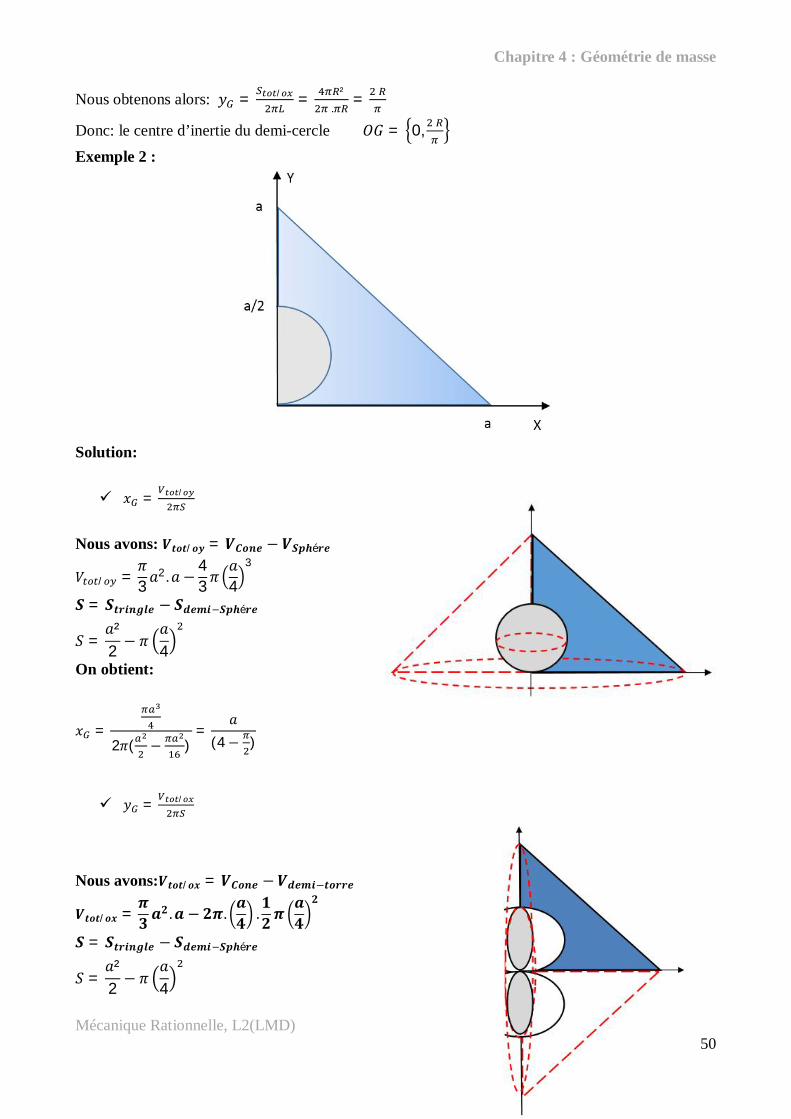
Donc: le centre d’inertie du demi-cercle 푂퐺 = 0, Exemple 2 : Solution: 푥 = /
Nous avons: 푽풕풐풕/풐풚 = 푽푪풐풏풆 − 푽푺풑풉é풓풆
푉 / =휋3푎
2.푎 −43휋
푎4
3
푺 = 푺풕풓풊풏품풍풆 − 푺풅풆풎풊 푺풑풉é풓풆
푆 =푎²2 − 휋
푎4
On obtient:
푥 =2휋( − )
=푎
(4− )
푦 = /
Nous avons:푽풕풐풕/풐풙 = 푽푪풐풏풆 −푽풅풆풎풊−풕풐풓풓풆
푽풕풐풕/풐풙 =흅ퟑ 풂
ퟐ.풂 − ퟐ흅.풂ퟒ .
ퟏퟐ흅
풂ퟒ
ퟐ
푺 = 푺풕풓풊풏품풍풆 − 푺풅풆풎풊 푺풑풉é풓풆
푆 =푎²2 − 휋
푎4

Chapitre 4 : Géométrie de masse
Mécanique Rationnelle, L2(LMD) S. BAADJ 51
On obtient:
푦 =푎(2
3 −휋
32)1− 휋
4
Finalement: 푶푮 = 푎(4−휋2)
,( )
4.3. Tenseur d'inertie d'un solide Définition: On appelle moment d'inertie d'un système discret homogène par rapport à un axe(∆) la quantité:
퐼∆ = 푚 푟²
Ou 푟 est la projection orthogonale du point 푃 la position de l'élément de masse 푚 sure l'axe (∆). Pour un système continu le moment d'inertie est défini par la relation suivante:
퐼∆ = 휌푟 푑푣
휌est la densité de masse, 푑푣 l'élément de masse. 4.3.2. Tenseur d'inertie Le tenseur d'inertie en un point 푂, tel que (푂, 횤, 횥, 푘) est un repère orthonormé, noté 푰푶 est définie par une matrice symétrique, réelle et diagonalisable.
푰푶 =푨 −푭 −푬−푭 푩 −푫−푬 −푫 푪
=푰풙풙 −푰풙풚 −푰풙풛−푰풚풙 푰풚풚 −푰풚풛−푰풛풙 −푰풛풚 푰풛풛
(∆
m
r
P
Chapitre 4 : Géométrie de masse
Mécanique Rationnelle, L2(LMD) S. BAADJ 52
4.3.3. Moment et produit d’inertie de solides
A. On appelle les moments d'inertieles éléments diagonaux du tenseur d'inertie, elle est définie par les équations suivantes:
푰풙풙 = (풚ퟐ + 풛ퟐ)풅풎
푰풚풚 = (풙ퟐ + 풛ퟐ)풅풎
푰풛풛 = (풙ퟐ + 풚ퟐ)풅풎
Un moment d'inertie caractérise la difficulté de mettre un solide en rotation.
B. On appelle les produits d'inertieles élémentsdu tenseur d'inertie suivant:
푰풙풚 = (풙.풚)풅풎
푰풙풛 = (풙. 풛)풅풎
푰풚풛 = (풚.풛)풅풎
Un produit d'inertie il caractérise l'absence de la symétrie d'un corps solide.
푰푶,admet trois valeur propres réelle et trois direction propre réelle et orthogonale:
Les valeurs propres sont appelées: Moment principaux d'inertie.
Les directions propres sont appelées: Axes principaux d'inertie.
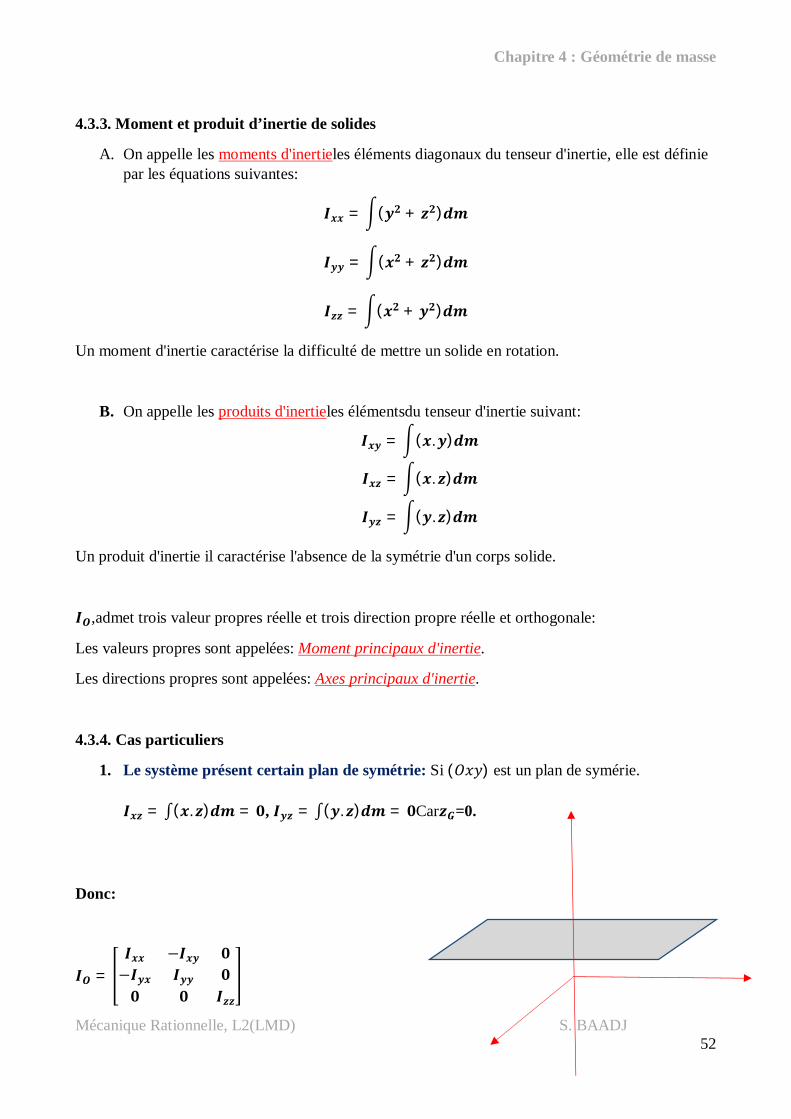
4.3.4. Cas particuliers
1. Le système présent certain plan de symétrie: Si (푂푥푦) est un plan de symérie. 푰풙풛 = ∫(풙.풛)풅풎 = ퟎ, 푰풚풛 = ∫(풚.풛)풅풎 = ퟎCar풛푮=0.
Donc:
푰푶 =푰풙풙 −푰풙풚 ퟎ−푰풚풙 푰풚풚 ퟎퟎ ퟎ 푰풛풛

Chapitre 4 : Géométrie de masse
Mécanique Rationnelle, L2(LMD) S. BAADJ 53
2. Le système admet deux plans de symétrie: Si les plan normales à 풙 et 풛 deux plans de symétrie.
푰풙풚 = 0, 푰풛풙 = 0, 푰풚풛 = 0.
푫풐풏풄:
푰푶 =푰풙풙 ퟎ ퟎퟎ 푰풚풚 ퟎퟎ ퟎ 푰풛풛
3. Le système possède un axe de révolution autour d'un axe:Si oz un axe de révolution.
La matrice est diagonale et les axes 푥, 푦 jouent le mêmerôle au point de vue de symétrie.
푫풐풏풄:
푰푶 =푨 ퟎ ퟎퟎ 푨 ퟎퟎ ퟎ 푪
avec: 퐴 + 퐵 = 2퐴 = 퐶 + 2∫푧²푑푚
4. Un solide de symétrie sphérique:
Pour un solide de symétrie sphérique les trois axes du
repéré jouent le mêmerôle, alors tous les moment
d'inertiesont égaux,푰풙풙 = 푰풚풚=푰풛풛,
et tous les produit d'inertie sont nulles car tous les plan sont des plan de symétrie,
푰풙풚 = 푰풙풛 = 푰풚풛 = ퟎ.
푰푶 =푨 ퟎ ퟎퟎ 푨 ퟎퟎ ퟎ 푨
Chapitre 4 : Géométrie de masse
Mécanique Rationnelle, L2(LMD) S. BAADJ 54
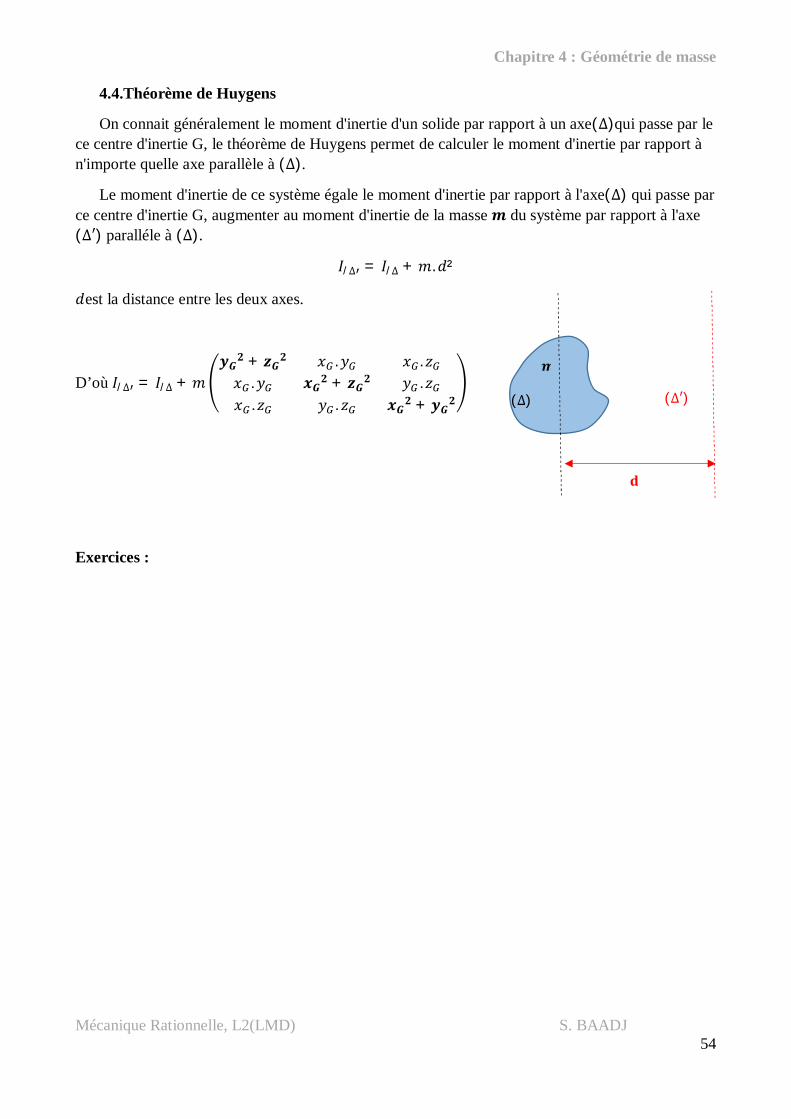
4.4.Théorème de Huygens
On connait généralement le moment d'inertie d'un solide par rapport à un axe(∆)qui passe par le ce centre d'inertie G, le théorème de Huygens permet de calculer le moment d'inertie par rapport à n'importe quelle axe parallèle à (∆).
Le moment d'inertie de ce système égale le moment d'inertie par rapport à l'axe(∆) qui passe par ce centre d'inertie G, augmenter au moment d'inertie de la masse 풎 du système par rapport à l'axe (∆′) paralléle à (∆).
퐼/∆ = 퐼/∆ + 푚.푑²
푑est la distance entre les deux axes.
D’où 퐼/∆ = 퐼/∆ + 푚풚푮ퟐ + 풛푮ퟐ 푥 .푦 푥 . 푧푥 .푦 풙푮ퟐ + 풛푮ퟐ 푦 . 푧푥 . 푧 푦 . 푧 풙푮ퟐ + 풚푮ퟐ
Exercices :
풎
퐝
(∆) (∆′)
Chapitre 5:
Dynamique du solide rigide
5.1. Rappels sur les quantités dynamiques pour un point matériel 5.2. Élément de cinétique du corps rigide : 5.2.5. Théorème de Koenig
A. 1er Théorème de Koenig pour le moment cinétique : A. 2iém Théorème de Koenig pour l’énergie cinétique :
5.3. La dynamique d'un corps solide: 5.3.2. Principe fondamental de la dynamique (PFD)
La loi fondamentale de la dynamique Théorème des actions réciproque :
5.3.3. Travail et puissance d’une force 5.3.4. Théorème de l’énergie cinétique
Chapitre 5: Dynamique du solide rigide
Mécanique Rationnelle, L2(LMD) S. BAADJ 56
Chapitre 5: Dynamique du solide rigide
5.1. Rappels sur les quantités dynamiques pour un point matériel
5.1.1. La quantité de mouvement:
La résultante cinétique (quantité de mouvement) d’un point matériel, de masse 푚 et de vitesse par rapport au repère 푅 est définie par:
푃 = 푚푉
5.1.2. Le moment cinétique:
Le moment cinétique (Moment de la quantité de mouvement)du point matériel M en un point Oquelconque de l’espace est donné:
휎 = 푂푀˄푚푉
5.1.3. La quantité d’accélération :
On appelle unequantité d’accélérationd’un point matérielM, de masse 푚par rapport au repère 푅 la quantité vectorielle suivants:
훤 = 푚훾
5.1.4. Le moment dynamique:
Le moment dynamique (Moment de la quantité d’accélération) du point matériel M en un point O quelconque de l’espace est donné:
훿 = 푂푀˄푚훾
5.1.5. L’énergie cinétique:
L’énergie cinétiqued’un point matériel 푀en mouvement par rapport à 푅 est donnée par :
퐸푐 =12푚푉
2푀푅0
5.2. Élément de cinétique du corps rigide : Soit un système matériel (푆)ou'푑푚 un élément de masse autour de 푀휖푆. 5.2.1. La quantité de mouvement: Pour un système matériel continu la quantité de mouvement (Résultante cinétique) à un instant t quelconque :
푃 / = 푉 푑푚 ,∀푀휖푆
5.2.2. Le moment cinétique: On appelle moment cinétique au point 푂la quantité :

Chapitre 5: Dynamique du solide rigide
Mécanique Rationnelle, L2(LMD) S. BAADJ 57
휎 , = 푂푀˄푉 푑푚,∀푀휖푆,∀푂휖푒푠푝푎푐푒
5.2.3. L'énergie cinétique: L’énergie cinétique 푇d’un système matériel(푆)en mouvement par rapport à 푅 est donnée par :
5.2.4. Torseur cinétique:
Sachant que:
휎 , = 푂푀˄푉 푑푚
= 푂퐴 + 퐴푀 ˄푉 푑푚
= 푂퐴˄푉 푑푚 + 퐴푀˄푉 푑푚
Implique que: 휎 , = 푂퐴˄푃 / + 휎 ,
Nous savons que cette relation est caractéristique d’un torseur (Chapitre2), donc On peut conclure qu’il existe un torseur appelé torseur cinétique de 푆par rapport à푅 ,
noté 퐶 , talque:
퐶 , =푃 / = 푉 푑푚 ,∀푀휖푆
휎 , = 푂푀˄푉 푑푚,∀푀휖푆
Ou' La résultante est égale à la quantité de mouvement d’un point matériel.
6. D'autre expression du torseur cinétique: Nous avons par définition du centre d’inertie:
푂퐺 =1푀 푂푀 푑푚
En dérivant cette expression par rapport au temps, on obtient : 푑푑푡 푀 푂퐺 =
푑푑푡 푂푀 푑푚
Dans notre cas (système de masse constante) il est possible de permuter les opérateurs d’intégration et de dérivation. En conséquence :
푀 푉 =푑푑푡 푂푀 푑푚
Chapitre 5: Dynamique du solide rigide
Mécanique Rationnelle, L2(LMD) S. BAADJ 58
푀 푉 = 푉 푑푚
La affectée de la masse totale du système : On peut alors écrire que larésultante dutorseur cinétiqueest la quantité de mouvement du centre de la masse :
퐶푂,푆 푅0=
푃푆/푅0 = 푀푠푉퐺
휎푂,푆 푅0= 푂푀˄푉푀
푅0푑푚,∀푀휖푆
5.2.5. Théorème de Koenig
B. 1erThéorème de Koenig pour le moment cinétique :
Le moment cinétique de (S) par rapport à G est défini par:
휎 , = 퐺푀˄푉 푑푚,∀푀휖푆
Soit M un point de(S)
La vitesse de M dans le référentiel R0est donner par : 푉 = 푉 + 푉
Nous avonsalors :
휎 , = 퐺푀˄(푉 + 푉 )푑푚,∀푀휖푆
휎 , = 퐺푀˄푉 푑푚 + 퐺푀푉 푑푚
On a ∫퐺푀˄푑푚 = 0 (définition du centre d’inertie)
On obtient alors :
휎 , = 퐺푀푑푚˄푉 + 퐺푀푉 푑푚 = 퐺푀푉 푑푚 = 휎 ,
Et pour un point quelconque A de l’espace nous aurons par la formule suivant :
휎 , = 휎 , + 퐴퐺푚푉
C’est ce qu’on appelle le premier théorème de Koënig pour le moment cinétique.
C. 2iém Théorème de Koenig pour l’énergie cinétique :
L’énergie cinétique d’un système solide par rapport à un révérenciel R0 est définie par :
Chapitre 5: Dynamique du solide rigide
Mécanique Rationnelle, L2(LMD) S. BAADJ 59
Or la loi de combinaison des vitesse donne :푉 = 푉 + 푉
D’où
퐸푐/푅0 =12 푉
2푀푅0푑푚 =
12 푉퐺
푅0+ 푉푀
푅퐺
2푑푚
=12 푉²퐺
푅0푑푚+
12 푉²푀
푅퐺푑푚+ 푉퐺
푅0푉푀
푅퐺푑푚
퐸푐/푅0 =12푚푉²퐺
푅0+ 퐸푐/퐺 + 푉퐺
푅0푉푀
푅퐺푑푚
or nous avons :푉 = /G
퐸푐/푅0 =12푚푉²퐺
푅0+ 퐸푐/퐺 + 푉퐺
푅0푉푀
푅퐺푑푚
퐸푐/푅0 =12푚푉²퐺
푅0+ 퐸푐/퐺 + 푉퐺
푅0
푑푑푡 /G 퐺푀 푑푚
Or ∫퐺푀˄푑푚 = 0 (définition du centre d’inertie)
L’expression de l’énergie cinétique décrit par le deuxième théorème de Koenig:
퐸푐/푅0 =12푚푉²퐺
푅0+ 퐸푐/퐺
5.3. La dynamique d'un corps solide: 5.3.1. Torseur dynamique:
Définition: un torseur dynamique noté 퐷 , d’un système matériel en mouvement par
rapport à un repère 푅 est définie par:
퐷 , =훤 푑푚 ,∀푀휖푆
훿 , = 퐴푀˄훤 푑푚,∀푀휖푆
Ou par l'expression:
퐷 , =푚훤
훿 , = 퐴푀˄훤 푑푚,∀푀휖푆
Démonstration: Nous avons par définition du moment cinétique:
휎 , = 퐴푀˄푉 푑푚,∀푀휖푆

Chapitre 5: Dynamique du solide rigide
Mécanique Rationnelle, L2(LMD) S. BAADJ 60
Dérivons les deux membresde l’égalité :
푑푑푡 휎 , =
푑푑푡 퐴푀˄푉 푑푚
D’où:
푑푑푡 퐴푀˄푉 =
푑푑푡 퐴푀˄푉 + 퐴푀˄
푑푑푡 푉
Et 퐴푀 = 퐴푂 + 푂푀 = −푉 + 푉
Donc 퐴푀˄푉 = −푉 ˄푉 퐴푀˄훤푀푅0
On obtient : 푑푑푡 휎퐴, = − 푉 ˄푉 푑푚 + 퐴푀˄훤푀
푅0푑푚
On utilisant la relation:푀 푉 = ∫ 푉 푑푚
On obtient: 휎퐴, = −푀 푉 ˄푉 + ∫퐴푀˄훤푀푅0푑푚
On aboutit à l’expression qui exprime la relation entre le torseur cinétique et le torseur dynamique:
훿 , = 퐴푀˄훤 푑푚 =푑푑푡 휎 ,푆 푅0
+ −푀푠푉퐴 푅0˄푉퐺
푅0
5.3.2. Principe fondamental de la dynamique (PFD)
La dynamique fait la relation entre les causes (les actions mécaniques) et les effets (le mouvement caractérisé par l’accélération et non la vitesse) annoncé par les principes fondamentaux de la dynamique de Newton connu par les lois de Newton. La loi fondamentale de la dynamique
Soit un point quelconque M du système (S), la relation fondamentale de la dynamique s’écrit:
dF + dF = 훤 푑푚
F Appelées les forces intérieures, sont le résultant des actions d’une partie de système matériel (S) sur une autre partie de (S) 퐹 appelées les forces extérieures, sont le résultant des actions du milieu extérieur sur le système matériel (S).

Chapitre 5: Dynamique du solide rigide
Mécanique Rationnelle, L2(LMD) S. BAADJ 61
X Y
Z
Remarque:Dans tout ce chapitre on utilise référentiels privilégiés dits galiléens (absolu) dans lesquels le mouvement d’un point matériel isolé est rectiligne uniforme (le principe d’inertie). En intégrant sur l’ensemble du système matériel (s), nous avons :
dFınt+ dFext = 훤.푑푚
Les actions mécaniques extérieures qui s’exercent sur (S) sont représentées par un torseur 휏 : appelé torseur des forces extérieures dont les éléments de réduction au point A sont :
픉 = Fext푀푒푥푡
Où 푀 est le moment des forces extérieures s’exerçant sur le système (S)au point A.
푀 = 푨푴 ˄dFint + 퐀퐌˄dFext = 퐀퐌˄훤푀푅0 .푑푚
Le principe fondamental de la dynamique montre que dans tout référentiel Galiléen, le torseur dynamique soit équivalent au torseur des forces extérieures:
퐷 , = 픉,
Ou' Les éléments de réduction du torseur dynamique 퐷 , du système (S) sont :
퐷 , = 퐷훿
Ou'퐷la résultante dynamique du système matériel (S) est égale à la résultante des forces (actions) mécaniques extérieures.
퐷 = 푚. 훤 = dFext
et훿 le moment dynamique du système matériel (S) au point A est égale au moment des forces (actions) mécaniques extérieures.
퐹
퐹
푑푚
Chapitre 5: Dynamique du solide rigide
Mécanique Rationnelle, L2(LMD) S. BAADJ 62
X Y
Z
훿 / = 푀 / =풅흈 /
풅풕
Pour un système mécanique composé Le moment dynamique est égal à la somme des moments dynamiques des éléments de système. Remarque:les actions mécanique intérieures qui s’exercent sur un système (S) est nul, donc ils n’apparaissent pas dans la loi fondamentale de la dynamique:픉 = 0. 7. Théorème des actions réciproque :
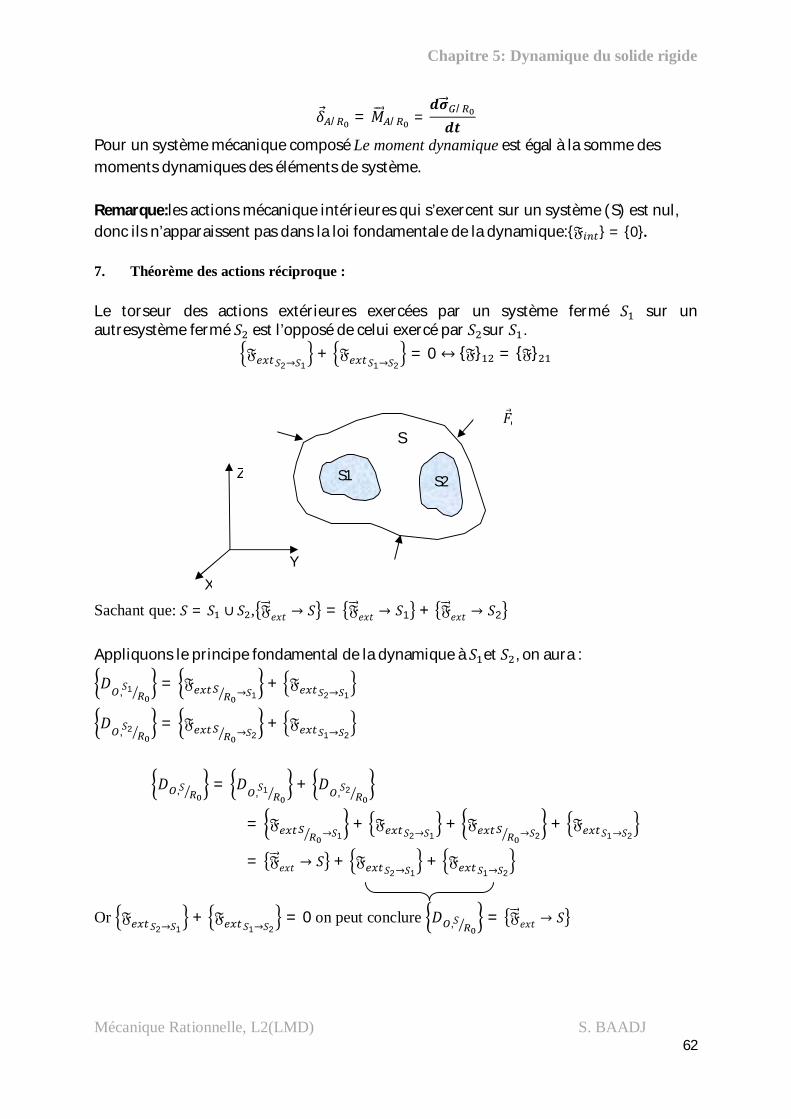
Le torseur des actions extérieures exercées par un système fermé 푆 sur un autresystème fermé 푆 est l’opposé de celui exercé par 푆 sur 푆 .
픉푆2→푆1
+ 픉푆1→푆2
= 0 ↔ 픉 = 픉
Sachant que: 푆 = 푆 ∪ 푆 , 픉푒푥푡 → 푆 = 픉푒푥푡 → 푆1 + 픉푒푥푡 → 푆2 Appliquons le principe fondamental de la dynamique à 푆 et 푆 , on aura :
퐷 ,푆1 = 픉→푆1
+ 픉푆2→푆1
퐷 ,푆2 = 픉→푆2
+ 픉푆1→푆2
퐷 ,푆 = 퐷 ,푆1 + 퐷 ,푆2
= 픉→푆1
+ 픉푆2→푆1
+ 픉→푆2
+ 픉푆1→푆2
= 픉푒푥푡 → 푆 + 픉푆2→푆1
+ 픉푆1→푆2
Or 픉푆2→푆1
+ 픉푆1→푆2
= 0 on peut conclure 퐷 ,푆 = 픉푒푥푡 → 푆
S1 S2
S 퐹

Chapitre 5: Dynamique du solide rigide
Mécanique Rationnelle, L2(LMD) S. BAADJ 63
8. Travail et puissance d’une force
Le travail élémentaire d'une force 푭appliquée à un point matériel P de vitesse푽푷à l'instant test égal:
푑푤 = 퐹.푑푂푃
La puissance que reçoit une point M de système est égal à :
푃 =푑푤푑푡 = 퐹.
푑푂푃푑푡 = 퐹. VP
Sachant que: 퐹 = 퐹 + 퐹
Nous aurons: 푑푤 = (퐹 + 퐹 ).푑푂푃Et 푃 = (퐹 + 퐹 ). VP
9. Théorème de l’énergie cinétique
L’énergie cinétique d'un système discontinu s’écrit :
La dérivée de cette expression par rapport au temps donne :
푑퐸푐푑푡
= VV푑푡푑푚 = V훾푃푑푚
Or la force à laquelle est soumise a une point Pdun solide de masse M est égale à :
퐹 = ∫훾 푑푚, on obtient:
= 퐹. V = 푃.
La puissance est égale à la dérivée par rapport au temps de l’énergie cinétique푃 = .
Chapitre 5: Dynamique du solide rigide
Mécanique Rationnelle, L2(LMD) S. BAADJ 64
X0
Y0
A
B
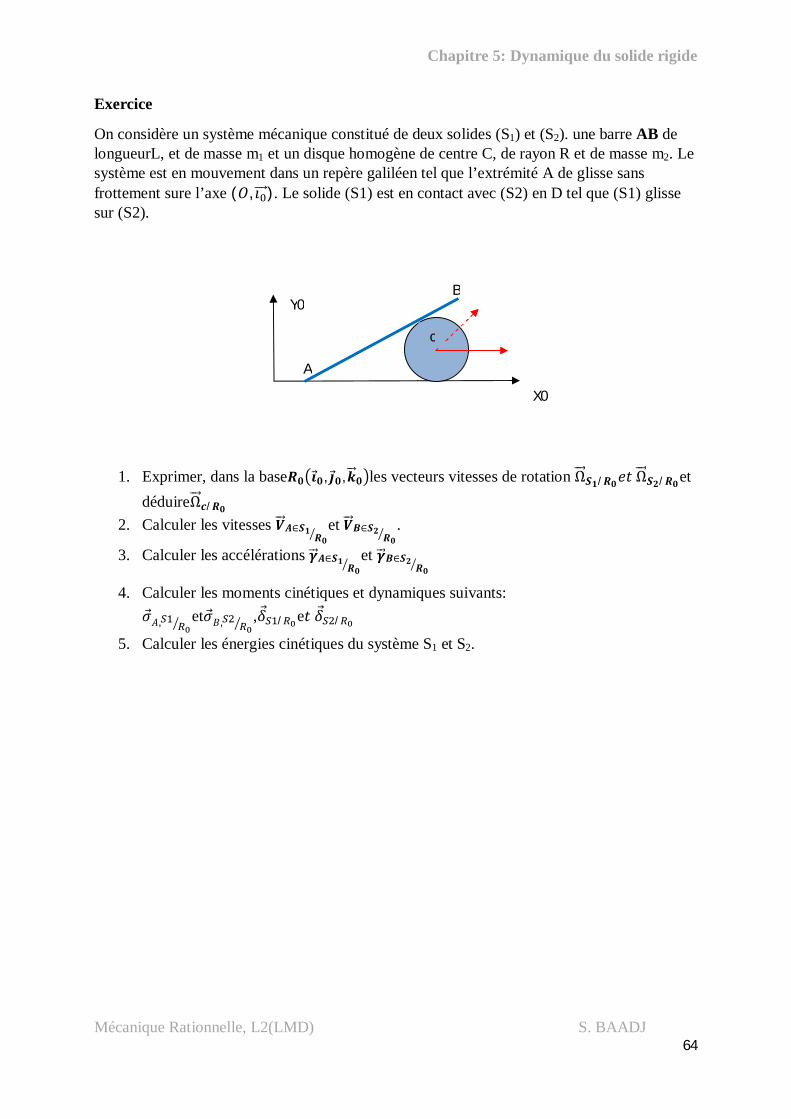
Exercice
On considère un système mécanique constitué de deux solides (S1) et (S2). une barre AB de longueurL, et de masse m1 et un disque homogène de centre C, de rayon R et de masse m2. Le système est en mouvement dans un repère galiléen tel que l’extrémité A de glisse sans frottement sure l’axe (푂, 횤). Le solide (S1) est en contact avec (S2) en D tel que (S1) glisse sur (S2).
1. Exprimer, dans la base푹ퟎ ퟎ, ퟎ, 풌ퟎ les vecteurs vitesses de rotation Ω푺ퟏ/푹ퟎ푒푡Ω푺ퟐ/푹ퟎet déduireΩ풄/푹ퟎ
2. Calculer les vitesses 푽푨∈푺ퟏ푹ퟎ
et 푽푩∈푺ퟐ푹ퟎ
.
3. Calculer les accélérations 휸푨∈푺ퟏ푹ퟎ
et 휸푩∈푺ퟐ푹ퟎ
4. Calculer les moments cinétiques et dynamiques suivants: 휎퐴, et휎퐵, ,훿 / e푡훿 /
5. Calculer les énergies cinétiques du système S1 et S2.
c
Références
1. Starjinski V. Mécanique rationnelle, Mir, Moscou (1984)
2. Mécanique rationnelle. A. Kadi. Cours & exercices résolus.
3. Cours de Mécanique des Systèmes de Solides Indéformables. M. BOURICH. 2émeédition 2014.
4. Notes de cours « Mécanique des solides rigides. Yves berthaud.(UPMC). 2006.
5. Polycopie Physique 4 : Mécanique Rationnelle COURS et EXERCICES. KASSOUL
Amar. 2009.
6. Éléments de Mécanique rationnelle. S. Targ. Editions Mir Moscou
7. Mécanique à l'usage des ingénieurs. STATIQUE. Edition Russell. Ferdinand P. Beer
8. Mécanique générale. Cours et exercices corrigés. Sylvie Pommier. Yves Berthaud.
DUNOD.
9. Mécanique générale - Théorie et application, Editions série. MURAY R. SPIEGEL
schaum, 367p.
10. Mécanique générale – Exercices et problèmes résolus avec rappels de cours, Office des
publications Universitaires, Tahar HANI 1983, 386p.
Related Documents











