VDG, Sept 27, 2007 1 Copyright © 2007 Handling New Adversaries in Secure MANETs Virgil D. Gligor Electrical and Computer Engineering University of Maryland College Park, MD. 20742 gligor @umd. edu ZISC Wireless Security Workshop Zurich September 27-28, 2007 * based on joint work with S. F. Bahari

Copyright © 2007 VDG, Sept 27, 2007 1 Handling New Adversaries in Secure MANETs Virgil D. Gligor Electrical and Computer Engineering University of Maryland.
Dec 21, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

VDG, Sept 27, 2007 1 Copyright © 2007
Handling New Adversaries in Secure MANETs
Virgil D. Gligor
Electrical and Computer Engineering University of Maryland
College Park, MD. [email protected]
ZISC Wireless Security WorkshopZurich
September 27-28, 2007
* based on joint work with S. F. Bahari

VDG, Sept 27, 2007 2 Copyright © 2007
Overview
1. New Adversary: Different from DY and Byzantine Models- capabilities: node capture, replication
2. An Approach for Handling Node Capture - example of emergent property
3. Ongoing and Future Research

VDG, Sept 27, 2007 3 Copyright © 2007
Approaches for Handling New Adversary
1. Detection and Recovery - Ex. Detection of node-replica attacks [Parno et al 2005]- Cost ? Traditional vs. Emergent Protocols - Advantage: always possible, good enough detection- Disadvantage: “when you’ve been had, you’ve been had by a
professional” [S. Lipner, cca. 1985]
2. Avoidance: early detection of node capture- Ex. Periodic monitoring (depending on node protection)- Cost vs. timely detection ? False positives ? Missed detection?- Advantage: avoids damage done by new adversary- Disadvantage: cannot always be used (e.g., disconnected nodes – are these really networked ?)
3. Future: “prevent” attacks- questionable proposition

VDG, Sept 27, 2007 4 Copyright © 2007
Avoidance: Periodic Monitoring of Target Nodes
Observation: Access to Node State (e.g., keys, memory content) requires the node to be taken “off-line” for time X - X is a random variable depending on
- node security; e.g., quality of content obfuscation, physical protection- node overload; e.g., on-line attempts to access Node State- node failure; e.g., tampering with node while on-line leads to failure
Idea: Node Status (on-, off-line) Monitoring by Neighbors in time T- T < X, capture (i.e., node offline) is always detected- T >= X, capture is never detected
Key Design Parameters- cost (i.e., no. and frequency of messages) - false alarm rate- missed detection rate

VDG, Sept 27, 2007 5 Copyright © 2007
32
1
8
9
104
5
6
7
CommunicationNeighborhood
monitoring target
Approach: Periodic Monitoring of Target Nodes
11
12
13
14propagate status
propagate st
atus
Keying Neighborhood

VDG, Sept 27, 2007 6 Copyright © 2007
Pair-wise Monitoring Scheme
• Continuous network self monitoring in each neighborhood
- really bad idea ?
• Ping message in time
• Response message in time
• Interval assignment for pinging based on node’s ID,
i j
ji
j
d-1
d
i
2
1
, , , ;iji j nonce H k nonce
,,1,;1 ij jinonceHknonce
_ mod 1 1Interval no i i K 1 _ 1Interval no i K
time
eT
.. .... ...thn epoch
pT.. . .. .
_Interval no i
1 1 12 2 2K KK
pT
pT
K >> node degree

VDG, Sept 27, 2007 7 Copyright © 2007
Pair-wise Monitoring Scheme
• Failure to respond appropriately to ping message in next Tp interval suggests node capture
• For example:
– delayed response past next Tp
– inappropriate message content
– packet loss, collision, or congestion
– physical damage or battery depletion of the node
• Detection interval T= MxTe helps distinguish node capture from response failures for other reasons
• Successful capture requires access to node’s internal states within T
• No response within T (i.e., after M retries) => alarm
• Larger T (or M) => increased vulnerability to capture
• Smaller T (or M) => increased false-alarm rate
VDG, Sept 27, 2007 8 Copyright © 2007
Design Objectives – normal mode
• Missed Detection • Capture time X (pdf fX(x)) is smaller than detection interval T
• Minimize the probability of a missed detection Pm
• False Alarms: device did not respond properly in interval T but device is not captured
• Exchange messages are lost with probability pl
• Reach end of a T=MxTe interval without monitoring message (“pinging”)
• Maximize expected residual time-to-false-alarm of nodes Lf
• Cost: neighbor “pinging” rate; • pr = probability of sending a pinging message in Te
• Minimize pr

VDG, Sept 27, 2007 9 Copyright © 2007
Markov Chain Model
• Detection (steady) state Sn (0 Sn M) of neighbor i w.r.t neighbor node j at epoch n:
• no. of successive Te epochs s (1 s M) in which node i does not ping node j (probability 1-pr)
• no. of successive epochs Te in which node i has not received any response
» communication errors with probability pl
» node j is captured and unable to respond
• probability of receiving a “ping” response Pe = pr(1-pl)
M M-2M-1 2 1 0
1 eP 1 eP 1 eP 1 eP 1 eP 1 eP
eP
eP
eP
eP
eP
1
. . .

VDG, Sept 27, 2007 10 Copyright © 2007
Steady State Analysis
• Steady state probability of being at each state s
(no capture in progress)
M M-2M-1 2 1 0
1 eP 1 eP 1 eP 1 eP 1 eP 1 eP
eP
eP
eP
eP
eP
1
. . .
1
1 1
M s
e es M
e
p pP
p
1 s M

VDG, Sept 27, 2007 11 Copyright © 2007
Probability of being at each state
• Increasing pr (and pe) leads to longer time to false alarm
• more concentration of mass in higher states, i.e. around the regenerative points
but incurs higher energy and communication costs
1e r lP p p Note:
where pl is constant

VDG, Sept 27, 2007 12 Copyright © 2007
Missed Detection
• Probability of missed detection• Given a witness node is in state s, the capture time for an
adversary’s success on a target node should be X < T= sTe
• Therefore, n e X ep miss S s P X sT F sT
1
1
1 1
M sMe e
m X eMs e
p pP F sT
p
1
M
m n ss
P P miss S s P

VDG, Sept 27, 2007 13 Copyright © 2007
Missed Detection
• Increasing detection interval T (or M) increases Pm
• longer detection interval => more time to complete node capture
• for a given detection interval T (or M), higher pr => higher Pm
- in the limit, the entire detection interval T is available to adversary

VDG, Sept 27, 2007 14 Copyright © 2007
False Alarms
• Expected Residual time-to-false-alarm, Lf
• Ts = residual time-to-false-alarm at current state; i.e., time for transition to state 0, given in state s and no capture in progress
• False alarm rate = Inverse of expected residual time-to-false-alarm
1 1
1
1 1
M sM Me e
f s s sMs s e
p pL T P T
p
1 11 1s e s e e e M e e s e MT T T p p T T T p T p T

VDG, Sept 27, 2007 15 Copyright © 2007
• Increasing pr increases Lf
• higher pr maintains nodes in higher states(i.e., longer time for non-captured nodes to reach false alarm state 0)
• Increasing M increases Lf
• Higher M (or T) => higher chance to go back to regenerative state M
False Alarms

VDG, Sept 27, 2007 16 Copyright © 2007
• Sensitivity of Lf to pr
higher pr leads to more concentration of states around higher values with correspondingly larger Ts
False Alarms

VDG, Sept 27, 2007 17 Copyright © 2007
Design Trade-offs
• Minimizing requires reducing and
• Maximizing requires increasing and
• Cost (e.g., energy) efficiency requires reducing
• Application is more sensitive to than
Tradeoffs for Determining and
• Cost analysis• Communication: message RX and TX per node per epoch
• Computation: MAC verifications and generations, and counter inc.
• Memory: registers per node (each associated with a neighbor)
• Probability of collision is upper-bounded by• Increase K s.t K>> d
mP MfL rp
rp
mP fL
rpM
rp
K
drp d
rp d
M
rp
VDG, Sept 27, 2007 18 Copyright © 2007
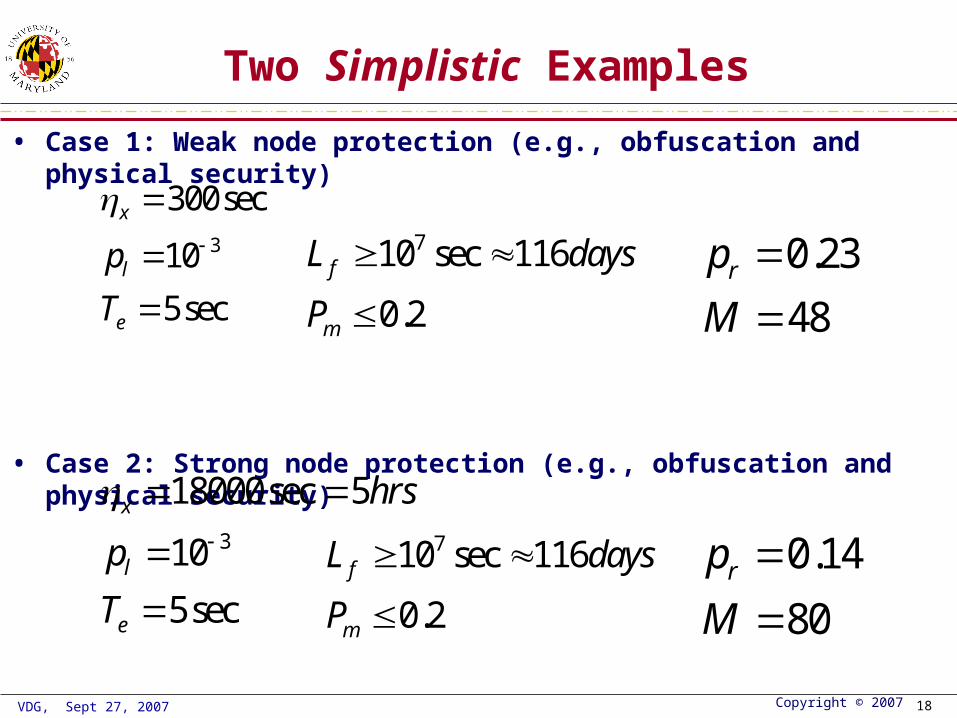
Two Simplistic Examples
• Case 1: Weak node protection (e.g., obfuscation and physical security)
• Case 2: Strong node protection (e.g., obfuscation and physical security)
3
300sec
10
5sec
x
l
e
p
T
0.23
48rp
M
710 sec 116
0.2
f
m
L days
P
0.14
80rp
M
710 sec 116
0.2
f
m
L days
P
3
18000sec 5
10
5sec
x
l
e
hrs
p
T

VDG, Sept 27, 2007 19 Copyright © 2007
• An Emergent Protocol• Goals
• Robustness of capture-detection scheme against faulty/malicious neighbors judgments about a common node
• Reducing the required energy (e.g., communication) costs for given node security
• Optimal parameters for given node security measures; e.g., pr, M, pr
q-node Probabilistic Pinging Scheme

VDG, Sept 27, 2007 20 Copyright © 2007
j
d-1
d
i
1
j
d-1
d
i
1
22
q-node Probabilistic Pinging Scheme

VDG, Sept 27, 2007 21 Copyright © 2007
q-node Probabilistic Pinging Scheme • each neighbor runs pair-wise probabilistic pinging protocol
with a (target) node independently
• each received alert flag increments the counter corresponding to the target node kept in all its neighbors
• counter= q => set revocation flag by q parties
(consensus among q neighbors about the target node)
• commit revocation flag and broadcast it by all q parties to the entire network
• each revocation flag expires after time T
and corresponding Markov chain is reset back to its initial state M

VDG, Sept 27, 2007 22 Copyright © 2007
q-node Missed Detection
• missed detection:
- at least d-q+1 witness neighbors do not flag “node capture”
or equivalently, at most q-1 neighbors flag “node capture”
1 2( ) 1 21 11 2
q qq d q d q dm m m m m m
d d dP P P P P P
d q d q d

VDG, Sept 27, 2007 23 Copyright © 2007
q-node Missed Detection- no. of parties, q < d (=20)
- lower Pm than in pair-wise case below threshold q (e.g., q<=14); higher above
Pair-wise case
Pair-wise case
VDG, Sept 27, 2007 24 Copyright © 2007
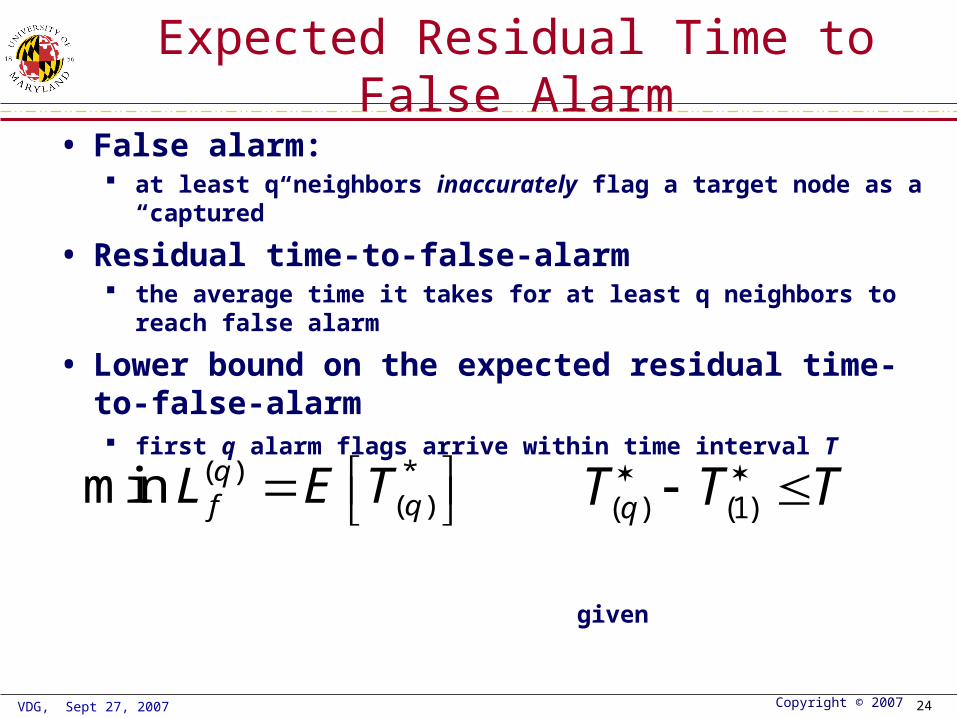
Expected Residual Time to False Alarm
• False alarm: at least q neighbors inaccurately flag a target node as a “captured”
• Residual time-to-false-alarm the average time it takes for at least q neighbors to reach false alarm
• Lower bound on the expected residual time-to-false-alarm first q alarm flags arrive within time interval T
given( ) (1)qT T T ( ) *
( )min qf qL E T

VDG, Sept 27, 2007 25 Copyright © 2007
Residual time-to-false-alarm• Ts vs s in q-level consensus
• note limited number of possibilities for having q-level consensus within time interval T

VDG, Sept 27, 2007 26 Copyright © 2007
Probability of False Alarm• Probability of False-Alarm = Pr(q alerts come within T)
depends on q almost exponentially; i.e. exp(-q)
threshold values above which the prob. of false alarms is min. e.g., q>= 4

VDG, Sept 27, 2007 27 Copyright © 2007
Rule of Thumb for Setting q
• Set the consensus level q as about 25% to 30% of the node degree in to minimize probability of a missed-detection probability of a false-alarm
• How robust is this “design rule” ?
• Overall cost ?

VDG, Sept 27, 2007 28 Copyright © 2007
Ongoing and Future Research
1. Explore the design space for “pinging” protocol- vary model parameters within all practical values- derive design rules
2. Find semi-synchronous protocols - viz., revocation approach of H. Chan et al IEEE-TDSC 2005
3. Find other tell-tale signs of node capture and compose them with current approach.- other emergent properties
4. Extend approach to other networks; e.g., mesh nets
Related Documents


![Denial-of-Service [Gligor, 84]](https://static.cupdf.com/doc/110x72/56813c28550346895da5a216/denial-of-service-gligor-84.jpg)








