Coordinate Measurement Systems Committee Coordinate Measurement Systems Committee Albuquerque, New Mexico April 13-17, 2001 Scanners – Robots – Measurement Scanners – Robots – Measurement Plans Plans Synergy in Motion Synergy in Motion Bruce Thomas Bruce Thomas Joe Calkins Joe Calkins Robert Salerno, Robert Salerno, Ph.D. Ph.D. Scott Sandwith Scott Sandwith Peter Howard Peter Howard Jack Shry Jack Shry New River Kinematics Fanuc Robotics MetricVision

Coordinate Measurement Systems Committee Albuquerque, New Mexico April 13-17, 2001 Scanners – Robots – Measurement Plans Synergy in Motion Bruce Thomas.
Dec 22, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Coordinate Measurement Systems CommitteeCoordinate Measurement Systems CommitteeAlbuquerque, New Mexico
April 13-17, 2001
Scanners – Robots – Measurement PlansScanners – Robots – Measurement Plans Synergy in MotionSynergy in Motion
Bruce ThomasBruce ThomasJoe CalkinsJoe CalkinsRobert Salerno, Ph.D.Robert Salerno, Ph.D.Scott SandwithScott Sandwith
Peter HowardPeter HowardJack ShryJack Shry
New River Kinematics
FanucRobotics
MetricVision
August 13-17 2001August 13-17 2001Coordinate Measurement System CommitteeCoordinate Measurement System Committee
Albuquerque, New MexicoAlbuquerque, New MexicoNew River Kinematics - MetricVisionNew River Kinematics - MetricVision
Scanners, Robots, Measurement Plans – Synergy in MotionScanners, Robots, Measurement Plans – Synergy in Motion
Motivation Motivation Metrology Metrology SolutionSolution
Lidar Scanner Lidar Scanner • Target-less Technology Target-less Technology Feature based measurementsFeature based measurements• Ideal for Ideal for unattendedunattended and and automatic automatic inspectioninspection
Need to automatically reposition to scan entire Need to automatically reposition to scan entire object (ex: Car)object (ex: Car)
Metrology software system architecture required Metrology software system architecture required to integrate the measurement system, CAD to integrate the measurement system, CAD design, and robotic manipulatordesign, and robotic manipulator
Measurement Plan capability required to Measurement Plan capability required to automatically acquire and analyze the dataautomatically acquire and analyze the data
It’s It’s Cool Cool !!!!

August 13-17 2001August 13-17 2001Coordinate Measurement System CommitteeCoordinate Measurement System Committee
Albuquerque, New MexicoAlbuquerque, New MexicoNew River Kinematics - MetricVisionNew River Kinematics - MetricVision
Scanners, Robots, Measurement Plans – Synergy in MotionScanners, Robots, Measurement Plans – Synergy in Motion
Component 1: Lidar ScannerComponent 1: Lidar Scanner Simple Automation: Simple Automation: ProgrammableProgrammable part and part and
tool tool featurefeature inspections, alignments, inspections, alignments, reports, initiate programs reports, initiate programs remotelyremotely
Accuracy: Accuracy: 65 65 m at 10 mm at 10 m Surface/Feature Measurements: Surface/Feature Measurements:
• MV200 requires only 1 pico-watt (10-12W) of MV200 requires only 1 pico-watt (10-12W) of return signal return signal any surface any surface
Fast: 1,000 measurements per second Fast: 1,000 measurements per second Versatile: Used in varied configurationsVersatile: Used in varied configurations
• Portable independent measurement systemPortable independent measurement system• Part of an automated robotic metrology Part of an automated robotic metrology
system system Non-contact Non-contact Target-lessTarget-less Features Features
No Photogrammetry Dots No Photogrammetry Dots No Laser Tracker SMRs No Laser Tracker SMRs No Retro Reflectors No Retro Reflectors No Probes No Probes No Contact No Contact
August 13-17 2001August 13-17 2001Coordinate Measurement System CommitteeCoordinate Measurement System Committee
Albuquerque, New MexicoAlbuquerque, New MexicoNew River Kinematics - MetricVisionNew River Kinematics - MetricVision
Scanners, Robots, Measurement Plans – Synergy in MotionScanners, Robots, Measurement Plans – Synergy in Motion
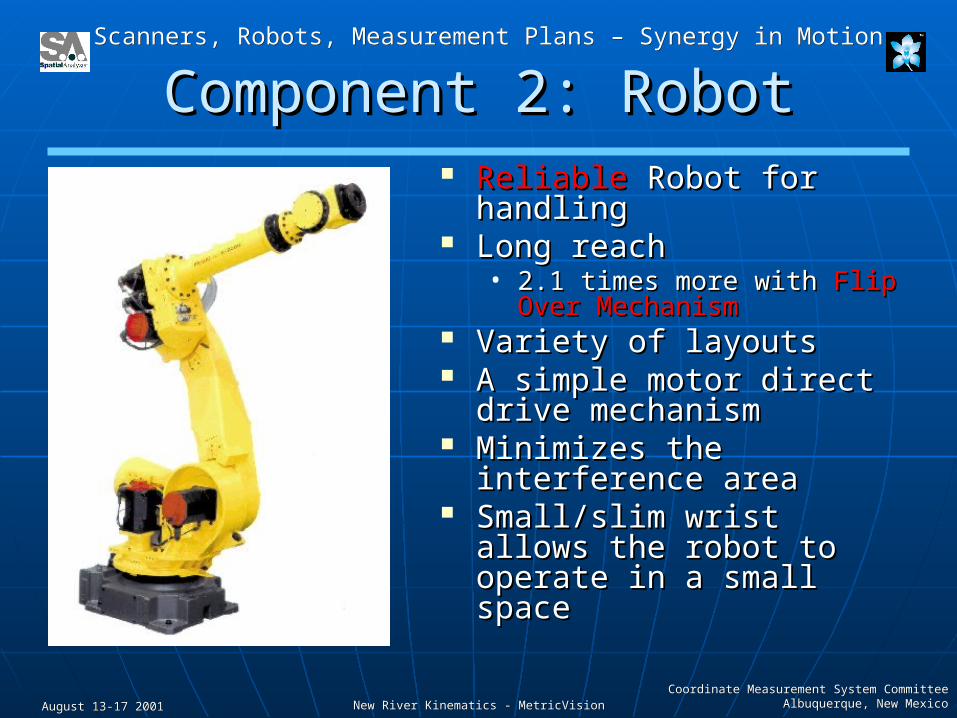
Component 2: RobotComponent 2: Robot ReliableReliable Robot for Robot for
handlinghandling Long reach Long reach
• 2.1 times more with 2.1 times more with Flip Flip Over MechanismOver Mechanism
Variety of layoutsVariety of layouts A simple motor direct A simple motor direct
drive mechanismdrive mechanism Minimizes the Minimizes the
interference areainterference area Small/slim wrist allows Small/slim wrist allows
the robot to operate in a the robot to operate in a small spacesmall space

August 13-17 2001August 13-17 2001Coordinate Measurement System CommitteeCoordinate Measurement System Committee
Albuquerque, New MexicoAlbuquerque, New MexicoNew River Kinematics - MetricVisionNew River Kinematics - MetricVision
Scanners, Robots, Measurement Plans – Synergy in MotionScanners, Robots, Measurement Plans – Synergy in Motion
Component 3: Integration SoftwareComponent 3: Integration Software
Programmable measurement planning with dynamic real time graphical interface
Distributed computing capable (real-time multi-task measurement and analysis across multiple computers)
Instrument compensation Synchronous Measurement between
Instruments (Master-Slave or Synchronous Polled Modes)
TCP/IP interfaces to instruments to enable distributed processing
Supports remote process control and monitoring.
Common instrument user-interface

August 13-17 2001August 13-17 2001Coordinate Measurement System CommitteeCoordinate Measurement System Committee
Albuquerque, New MexicoAlbuquerque, New MexicoNew River Kinematics - MetricVisionNew River Kinematics - MetricVision
Scanners, Robots, Measurement Plans – Synergy in MotionScanners, Robots, Measurement Plans – Synergy in Motion
System IntegrationSystem Integration
One interface controls and One interface controls and coordinates the system coordinates the system componentscomponents
Extrinsic Calibration through In-Extrinsic Calibration through In-line Robot Control Model:line Robot Control Model:• Tool to CLR FrameTool to CLR Frame• Robot Base to WORLDRobot Base to WORLD
Integrated graphical automation Integrated graphical automation programming for n systemsprogramming for n systems
Distributed computingDistributed computing Remote monitoring and controlRemote monitoring and control
August 13-17 2001August 13-17 2001Coordinate Measurement System CommitteeCoordinate Measurement System Committee
Albuquerque, New MexicoAlbuquerque, New MexicoNew River Kinematics - MetricVisionNew River Kinematics - MetricVision
Scanners, Robots, Measurement Plans – Synergy in MotionScanners, Robots, Measurement Plans – Synergy in Motion
Adaptive Scanning In ActionAdaptive Scanning In Action

August 13-17 2001August 13-17 2001Coordinate Measurement System CommitteeCoordinate Measurement System Committee
Albuquerque, New MexicoAlbuquerque, New MexicoNew River Kinematics - MetricVisionNew River Kinematics - MetricVision
Scanners, Robots, Measurement Plans – Synergy in MotionScanners, Robots, Measurement Plans – Synergy in Motion
Adaptive Scanning: Close-upAdaptive Scanning: Close-up

August 13-17 2001August 13-17 2001Coordinate Measurement System CommitteeCoordinate Measurement System Committee
Albuquerque, New MexicoAlbuquerque, New MexicoNew River Kinematics - MetricVisionNew River Kinematics - MetricVision
Scanners, Robots, Measurement Plans – Synergy in MotionScanners, Robots, Measurement Plans – Synergy in Motion
Benefits / ApplicationsBenefits / Applications Increased workspaceIncreased workspace for metrology equipment by for metrology equipment by
extending visibilityextending visibility Integrates reliable Integrates reliable hybridhybrid technologies on a technologies on a
common platformcommon platform through general through general object orientedobject oriented architecture architecture
Adaptive Automation improves process reliability Adaptive Automation improves process reliability • If the system can’t quite see the feature it can be If the system can’t quite see the feature it can be
programmed to programmed to interactively hunt it downinteractively hunt it down Custom configurationsCustom configurations fit the application fit the application
• Robot moves instrumentRobot moves instrument• Robot move the partRobot move the part• Adaptive controlAdaptive control• Etc…Etc…
Integrated robot Integrated robot performance enhancementsperformance enhancements (feedback / calibration loop)(feedback / calibration loop)
August 13-17 2001August 13-17 2001Coordinate Measurement System CommitteeCoordinate Measurement System Committee
Albuquerque, New MexicoAlbuquerque, New MexicoNew River Kinematics - MetricVisionNew River Kinematics - MetricVision
Scanners, Robots, Measurement Plans – Synergy in MotionScanners, Robots, Measurement Plans – Synergy in Motion
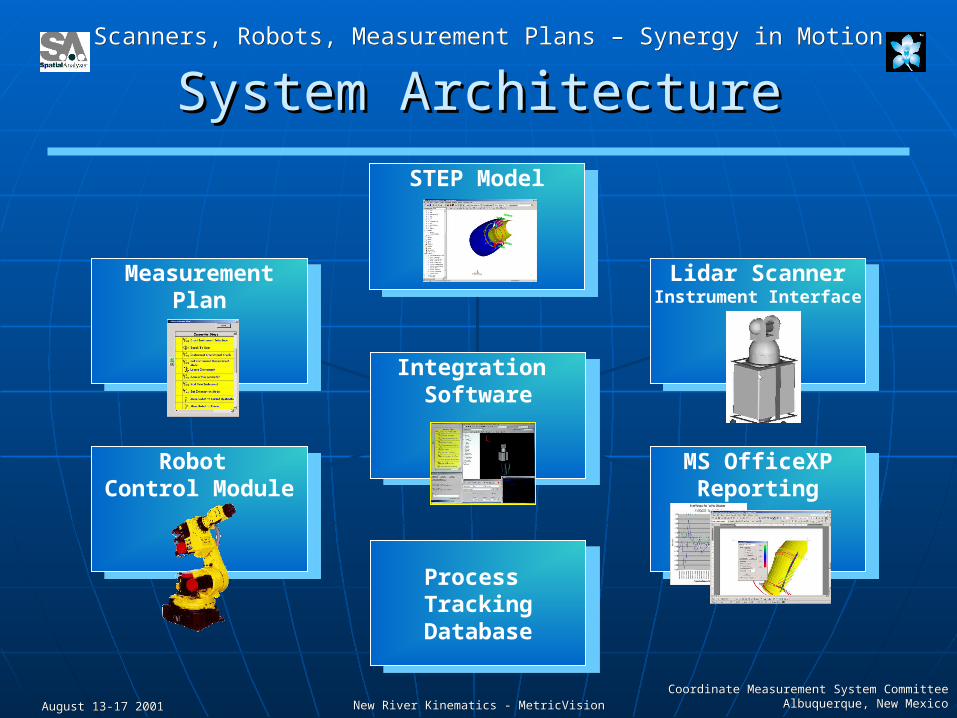
MeasurementPlan
MeasurementPlan
Robot Control Module
Robot Control Module
Process TrackingDatabase
Process TrackingDatabase
MS OfficeXPReporting
MS OfficeXPReporting
Lidar ScannerInstrument Interface
Lidar ScannerInstrument Interface
STEP ModelSTEP Model
Integration Software
Integration Software
System ArchitectureSystem Architecture
August 13-17 2001August 13-17 2001Coordinate Measurement System CommitteeCoordinate Measurement System Committee
Albuquerque, New MexicoAlbuquerque, New MexicoNew River Kinematics - MetricVisionNew River Kinematics - MetricVision
Scanners, Robots, Measurement Plans – Synergy in MotionScanners, Robots, Measurement Plans – Synergy in Motion
MeasurementPlan
MeasurementPlan
Robot Control Module
Robot Control Module
Process TrackingDatabase
Process TrackingDatabase
MS OfficeXPReporting
MS OfficeXPReporting
Lidar ScannerInstrument Interface
Lidar ScannerInstrument Interface
STEP ModelSTEP Model
Integration Software
Integration Software
Questions – Future DirectionQuestions – Future Direction
Related Documents











