2834 IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 5, NO. 10, OCTOBER 2006 Cooperative Transmission in Poisson Distributed Wireless Sensor Networks: Protocol and Outage Probability Liang Song, Member, IEEE, and Dimitrios Hatzinakos, Senior Member, IEEE Abstract— We study cooperative wireless communications in the physical layer of a Poisson distributed wireless sensor network, where the spatial diversity of multiple relay nodes is utilized to improve the link performance. The tradeoff among network power consumption, spectral efficiency, outage proba- bility, and sensor node density is discussed under the proposed Cooperative Transmission Protocol for Sensor Networks (CTP- SN). CTP-SN is considered as a typical implementation of the two-phase cooperative transmission paradigm in wireless sensor networks. We derive an asymptotic upper bound for the capacity outage probability of CTP-SN. The bound is shown to be decreasing exponentially, when the sensor node density increases. Via the bound, we demonstrate that the cooperative protocol performs asymptotically much better than the non-cooperative direct transmission. Index Terms— Sensor networks, Poisson distributions, capacity outage probability, physical layer, spectral efficiency, power consumption. I. I NTRODUCTION W IRELESS sensor networks are formed by a collection of battery-resource limited sensor nodes working to- gether for a common task [1]–[3]. Under the limited wireless infrastructure, the network works autonomously like a dis- tributed data collection and processing machine. It is desired that sensor networks have long lifetime after deployment. Hence, cooperative and energy efficient protocols for sensor nodes have attracted a great deal of interest in all layers of communication system design. Sensor networks have been considered under the same paradigm as classical ad hoc networks. On the network layer, the topology management of sensor networks is, however, decided by application specific cooperations. Due to the pack- ets traffic pattern, clustering, [2], is naturally of interest in a data-gathering sensor network, while flat networks [3] can be favored in target detection and tracking. When the application is delay non-sensitive, Sensor Networks with Mobile Sinks (MSSN), [4], achieve the energy efficiency by converting the Manuscript received September 1, 2004; revised February 2, 2005 and September 5, 2005; accepted November 28, 2005. The associate editor coordinating the review of this paper and approving it for publication was A. Scaglione. This work is supported by Canadian Natural Sciences and Engineering Research Council (NSERC). L. Song and D. Hatzinakos are with the Edward S. Rogers Sr. De- partment of Electrical and Computer Engineering, University of Toronto, 10 King’s College Road, Toronto, ON M5S 3G4, Canada (email: {songl, dimitris}@comm.utoronto.ca). Digital Object Identifier 10.1109/TWC.2006.04598. multi-hop information propagations into single hop transmis- sions. With the corresponding medium access control (MAC) layer design, the network topology can decide the transport capacity. In general, for a flat peer to peer ad-hoc network, it has been concluded in [5] that the capacity per node decreases with the order of Θ 1 √ N under a uniform traffic pattern, where N denotes the number of nodes in a constant area. This work was further extended in [6], [7], where mobility and delay were considered. Our work is focused on cooperative transmission protocols at the physical layer, where classical relay channels, [8], and their multiple terminal extensions are central to the study. In infrastructure networks, multiple access channels with inter- node cooperations have been studied in [9], [10]. On the other hand, it was shown in [11] that the multi-terminal coding cooperation allows a sizable gain in the throughput of a flat ad-hoc network. A general study on the Shannon capacity of wireless networks remains an open information theoretic prob- lem even for the Gaussian case. From a practical perspective, the “Two-phase” cooperative transmission paradigm has been of interest [10], [12]–[17]. In the paradigm, the source node broadcasts the shared information to relays during Phase I, and relay nodes cooperatively transmit the information to the destination node during Phase II. Based on a Poisson node distribution model, we study how the two-phase cooperative transmission can reduce the link capacity outage probability. The tradeoff among network power consumption, spectral efficiency, outage probability, and sensor node density is investigated for the proposed Coop- erative Transmission Protocol for Sensor Networks (CTP-SN). CTP-SN takes the form of a typical implementation of the two-phase cooperation paradigm in wireless sensor networks. The underlining philosophy is to convert the spatial diversity of multiple relay sensor nodes into the gain of lower wireless link outage probability. Compared to the existing literature, our study is based on the following three considerations. First, wireless sensor networks are energy limited. Instead of enforcing transmission power constraints on every indi- vidual node [10], [12], the total power consumption of the network should be considered [13]–[15]. Different from the more information theoretical studies in [13]–[15] where only the transmission power is discussed, we consider both the transmission and transceiver circuit power consumption. The latter has been shown to be non-negligible for wireless sensor networks, in [18], [19]. As it will be shown later, we find 1536-1276/06$20.00 c 2006 IEEE

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
2834 IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 5, NO. 10, OCTOBER 2006
Cooperative Transmission inPoisson Distributed Wireless Sensor Networks:
Protocol and Outage ProbabilityLiang Song, Member, IEEE, and Dimitrios Hatzinakos, Senior Member, IEEE
Abstract— We study cooperative wireless communications inthe physical layer of a Poisson distributed wireless sensornetwork, where the spatial diversity of multiple relay nodes isutilized to improve the link performance. The tradeoff amongnetwork power consumption, spectral efficiency, outage proba-bility, and sensor node density is discussed under the proposedCooperative Transmission Protocol for Sensor Networks (CTP-SN). CTP-SN is considered as a typical implementation of thetwo-phase cooperative transmission paradigm in wireless sensornetworks. We derive an asymptotic upper bound for the capacityoutage probability of CTP-SN. The bound is shown to bedecreasing exponentially, when the sensor node density increases.Via the bound, we demonstrate that the cooperative protocolperforms asymptotically much better than the non-cooperativedirect transmission.
Index Terms— Sensor networks, Poisson distributions, capacityoutage probability, physical layer, spectral efficiency, powerconsumption.
I. INTRODUCTION
W IRELESS sensor networks are formed by a collectionof battery-resource limited sensor nodes working to-
gether for a common task [1]–[3]. Under the limited wirelessinfrastructure, the network works autonomously like a dis-tributed data collection and processing machine. It is desiredthat sensor networks have long lifetime after deployment.Hence, cooperative and energy efficient protocols for sensornodes have attracted a great deal of interest in all layers ofcommunication system design.
Sensor networks have been considered under the sameparadigm as classical ad hoc networks. On the network layer,the topology management of sensor networks is, however,decided by application specific cooperations. Due to the pack-ets traffic pattern, clustering, [2], is naturally of interest in adata-gathering sensor network, while flat networks [3] can befavored in target detection and tracking. When the applicationis delay non-sensitive, Sensor Networks with Mobile Sinks(MSSN), [4], achieve the energy efficiency by converting the
Manuscript received September 1, 2004; revised February 2, 2005 andSeptember 5, 2005; accepted November 28, 2005. The associate editorcoordinating the review of this paper and approving it for publication wasA. Scaglione. This work is supported by Canadian Natural Sciences andEngineering Research Council (NSERC).
L. Song and D. Hatzinakos are with the Edward S. Rogers Sr. De-partment of Electrical and Computer Engineering, University of Toronto,10 King’s College Road, Toronto, ON M5S 3G4, Canada (email: {songl,dimitris}@comm.utoronto.ca).
Digital Object Identifier 10.1109/TWC.2006.04598.
multi-hop information propagations into single hop transmis-sions. With the corresponding medium access control (MAC)layer design, the network topology can decide the transportcapacity. In general, for a flat peer to peer ad-hoc network, ithas been concluded in [5] that the capacity per node decreaseswith the order of Θ
(1√N
)under a uniform traffic pattern,
where N denotes the number of nodes in a constant area.This work was further extended in [6], [7], where mobilityand delay were considered.
Our work is focused on cooperative transmission protocolsat the physical layer, where classical relay channels, [8], andtheir multiple terminal extensions are central to the study. Ininfrastructure networks, multiple access channels with inter-node cooperations have been studied in [9], [10]. On the otherhand, it was shown in [11] that the multi-terminal codingcooperation allows a sizable gain in the throughput of a flatad-hoc network. A general study on the Shannon capacity ofwireless networks remains an open information theoretic prob-lem even for the Gaussian case. From a practical perspective,the “Two-phase” cooperative transmission paradigm has beenof interest [10], [12]–[17]. In the paradigm, the source nodebroadcasts the shared information to relays during Phase I,and relay nodes cooperatively transmit the information to thedestination node during Phase II.
Based on a Poisson node distribution model, we studyhow the two-phase cooperative transmission can reduce thelink capacity outage probability. The tradeoff among networkpower consumption, spectral efficiency, outage probability,and sensor node density is investigated for the proposed Coop-erative Transmission Protocol for Sensor Networks (CTP-SN).CTP-SN takes the form of a typical implementation of thetwo-phase cooperation paradigm in wireless sensor networks.The underlining philosophy is to convert the spatial diversityof multiple relay sensor nodes into the gain of lower wirelesslink outage probability. Compared to the existing literature,our study is based on the following three considerations.
First, wireless sensor networks are energy limited. Insteadof enforcing transmission power constraints on every indi-vidual node [10], [12], the total power consumption of thenetwork should be considered [13]–[15]. Different from themore information theoretical studies in [13]–[15] where onlythe transmission power is discussed, we consider both thetransmission and transceiver circuit power consumption. Thelatter has been shown to be non-negligible for wireless sensornetworks, in [18], [19]. As it will be shown later, we find
1536-1276/06$20.00 c© 2006 IEEE

SONG and HATZINAKOS: COOPERATIVE TRANSMISSION IN POISSON DISTRIBUTED WIRELESS SENSOR NETWORKS 2835
that the transceiver circuit power consumption is decisive onwhether or not the cooperation is beneficial.
Second, our study for energy efficiency exploits the tradeoffbetween the network power consumption and the capacityoutage probability [20]. Note that in [13]–[15], the energyefficiency is defined in terms of energy consumption per bit,where the analysis tools of [21] and the ergodic capacity of[22] are utilized. To achieve ergodic capacity, sophisticatedlong channel coding is required for averaging over the channelfading states, which can be difficult for implementation inwireless sensor networks. Capacity outage probability, on theother hand, examines the tradeoff between a fixed rate and theprobability that the rate is achievable over the fading channel,which is much simpler and therefore more favorable. Note thatthe capacity outage probability is also used as the figure ofmerit in [10], [12].
Third, in [21], it has been suggested that wireless commu-nications should operate under low spectral efficiency (wideband) regime in order to achieve high energy efficiency. Inconsequence, the results of [13]–[15] apply only in the lowSignal to Noise Ratio (SNR) and low spectral efficiencyregime. In practice, however, narrow band and high spectralefficiency might be required, as it has been demonstratedin [16]. In this paper and for our study, we show that thetwo conditions (high/low spectral efficiency) are equivalent.
The major contribution of our work is on a statisticalframework in the performance analysis, where the Poissonprobabilistic node distribution model is adopted. The practicalimportance of the contribution relies on the following twofacts. First, in a large scale dense sensor network, havingindividual nodes locally manage the information of networkneighborhood might not be feasible, since the neighborhoodcan consist of a large number of nodes. Second, the sensornodes might frequently fall into sleep, or suffer from nodefailures and location shifts. Also, there will be new sensornodes joining the network over time due to new deployments.
To the best of our knowledge, it is the first time thatthe impact of statistical node density is introduced in theperformance limit analysis of wireless relay networks. Thetwo main results of the paper are the following.• By means of physical layer cooperation, it is shown that
the link capacity outage probability decreases asymptoti-cally at least exponentially, when the sensor node densityincreases. (Theorem 2, Section IV-E)
• With the same network power consumption, the outageprobability of the non-cooperative direct transmissiondecreases asymptotically inversely with the node density,at the most. (Theorem 3, Section IV-E)
In what follows, the system modelling is described in Sec-tion II. The CTP-SN protocol is described in Section III. Theperformance analysis is given in Section IV. Numerical resultsare provided in Section V to validate the performance analysis.Discussions from various perspectives appear in Section VI.Concluding remarks are given in Section VII.
II. MODEL ASSUMPTIONS
A. Network Model
We consider a large number of sensor nodes uniformly andrandomly deployed over a 2-D field. The distribution can be
modelled as a homogeneous Poisson process, [23], with thenode density λ. That is, given an area of the size |A| in thefield, the number of nodes in the area, μ(A), follows thePoisson distribution with the parameter λ|A|, i.e.
Prob(μ(A) = m) = e−λ·|A| · (λ·|A|)m
m! ,m = 0, 1, . . . ,∞ .
(1)
We study the performance of one point-to-point wirelesslink between a source node s and a destination node d.All sensor nodes in the neighborhood can serve as potentialrelay nodes. In the developing of CTP-SN, we also make thefollowing two realistic assumptions:
1) Channel State Information (CSI) is not available ontransmitting nodes.
2) Sensor nodes are half-duplex, i.e. unable to transmit andreceive simultaneously.
B. Wireless Channel Model
The wireless channel assumes a frequency non-selectiveRayleigh fading model with additive Gaussian noise. Morespecifically, let Lk denote the location of node k. Giventwo nodes k1 and k2, with the inter-node distance Dk1,k2 =‖Lk1 − Lk2‖, the channel gain βk1,k2 between k1 and k2 isan exponential random variable [24], with the expected valueas,
E (βk1,k2) = G · 1Dnk1,k2
, (2)
where G is a constant determined by antenna gains. Theparameter n is the path loss component [25], which takes thevalue of ‘2’ in the ideal free space, and it is between ‘2’ and‘5’ in more complicated propagation environments.
Moreover, let W denote the channel bandwidth, and N0
denote the additive Gaussian noise power density. The channelnoise power is denoted by σ2
n = N0 · W . Let Pt(k1)denote the transmission power on node k1. Given βk1,k2 , theinstantaneous channel capacity from k1 to k2 is [8],
C(γk2|k1) = W · log(1 + γk2|k1), (3)
where
γk2|k1 =Pt(k1) · βk1,k2
σ2n
, (4)
denotes the instantaneous SNR at node k2, given that only k1
is transmitting.
C. Energy Consumption Model
In determining the energy consumption, for the node k, weconsider both the transmission power Pt(k), and the circuitpowers Pc,t, Pc,r at the transmitter and the receiver, respec-tively. Note that the circuit power consumption is assumed tobe uniform over all the nodes.
We adopt the model in [26], where the active power oftransmitter, Pon,t(k), and receiver, Pon,r(k), are respectively,
Pon,t(k) = (1 + α) · Pt(k) + Pc,t ,Pon,r(k) = Pc,r .
(5)
The parameter α in Eq. (5) is a constant decided by the drainefficiency of the RF power amplifier.

2836 IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 5, NO. 10, OCTOBER 2006
Fig. 1. CTP-SN Protocol.
III. CTP-SN TRANSMISSION PROTOCOL
Consider the scenario in Fig. 1, the source and destinationnodes are denoted by s and d, respectively.Ds,d is the distancebetween the two. Let Ptot denote the average network powerconsumption in transmission, and let R denote the desiredaverage spectral efficiency in bit/s/Hz. We develop the CTP-SN protocol in accordance with the two-phase cooperativetransmission paradigm.
A. Protocol Outline
1) CTP-SN Protocol without Feedback: The CTP-SN pro-tocol is divided into two phases. In Phase I, the source sbroadcasts the packet to the relay nodes with the transmissionpower P1 and the spectral efficiency R1 (transmission rateW · R1). Further, we define two parameters D1 and D2,satisfying D1+D2 > Ds,d, which are the radius of two circlescentered on s and d respectively. We impose the restrictionthat only the nodes within the overlapping region of the twocircles are permitted to serve as relay nodes, which is depictedin Fig. 1 as the shaded area. Ar and |Ar| denote this shadedarea and the size of this area, respectively.
Let Π1 and Nr,1 denote the set and the number of potentialrelay nodes respectively, where Nr,1 = |Π1|. Define Π2 ⊆Π1 as the subset of relay nodes which can successfully decodethe packet transmitted by s. Also let Nr,2 denote the numberof nodes in Π2, Nr,2 = |Π2|.
In Phase II, all the Nr,2 nodes in Π2 transmit space-timecoded packets to the destination d, with the spectral efficiencyR2 (transmission rate W · R2), and the transmission powerP2 per node. Thus, the spatial diversity of the order Nr,2is achieved by means of distributed space-time coding. Moredetailed comments are given in Section III-C.2.
2) CTP-SN Protocol with Feedback: Consider that afterPhase I, the destination d can send a short acknowledge (ACK)packet to all the relay nodes, which indicates whether thedesired packet has been successfully decoded in d. The ACKpacket needs to contain only one bit yes/no information, hence,the energy and time consumption of the ACK packet can
be neglected. Once the relay nodes know that the packet isavailable on d, Phase II is cancelled, otherwise the relay nodesproceed to Phase II. Compared with the protocol withoutfeedback, the protocol with feedback will also force thedestination node to join Phase I.
3) Direct Transmission: Simple direct transmission will beemployed in the sequel for the performance comparisons withCTP-SN. In this case, the source s transmits the packet directlyto the destination d. No node in the neighborhood would actas a cooperative relay node participating in the transmission.
B. Parameter Constraints
In direct transmissions, given Ptot, there is Pon,t(s) +Pon,r(d) = Ptot. Then, from Eq. (5), we find that,
Pt(s) =Ptot − Pt,c − Pt,r
1 + α. (6)
Conditions are more complicated in CTP-SN. Let ΔT1 andΔT2 denote the duration of Phase I and Phase II per packet,respectively. And let P1,all and P2,all denote the averagepower consumption in Phase I and Phase II, respectively. Thenthe following equations hold,
ΔT1 · R1 = ΔT2 ·R2 = (ΔT1 + ΔT2) ·R ,P1,all ·ΔT1 + P2,all ·ΔT2 = Ptot · (ΔT1 + ΔT2) .
(7)
From Eq. (7), it is straightforward to obtain,
R =R1 ·R2
R1 +R2, (8)
and,
P1,all · RR1
+ P2,all · RR2
= Ptot . (9)
Furthermore, by using the model of Eq. (5), we have,
P1,all = Pon,t(s) + E(∑
k∈Π1Pon,r(k)
)= P1 · (1 + α) + Pt,c + E(Nr,1) · Pr,c , (10)
and,
P2,all = Pon,r(d) + E(∑
k∈Π2Pon,t(k)
)= (P2 · (1 + α) + Pt,c) ·E(Nr,2) + Pr,c .
(11)
By combining Eqs. (9,10,11), we get,
[P1 · (1 + α) + E(Nr,1) · Pr,c + Pt,c] · RR1+[(P2 · (1 + α) + Pt,c) · E(Nr,2) + Pr,c] · RR2
= Ptot .(12)
In summary, Eqs. (8) and (12) describe the parameter con-straints in CTP-SN.
C. Comments
1) Comments on the CTP-SN Protocol: We consider CTP-SN as a typical implementation of the two-phase cooperativetransmission paradigm in wireless sensor networks, where CSIis not available at the transmitters.
The explicit definitions of D1, D2 are beneficial for ourstudy in deriving performance limits. In practice, the relaynodes can be chosen by the broadcasting of two wake-upbeacons from the source and the destination, respectively. Thewake-up beacons can possibly be sent by secondary low powerwake-up radio, which controls the broadcasting range of D1
SONG and HATZINAKOS: COOPERATIVE TRANSMISSION IN POISSON DISTRIBUTED WIRELESS SENSOR NETWORKS 2837
and D2, respectively. A similar case can be found in [3]. Thenodes with the receptions of both two beacons participate thetransmission as relay nodes.
The definitions of the two parameters D1 and D2 can beconceptually understood by noting the followings. A nodek, with a distance to the source Ds,k > D1, does notparticipate in the cooperation protocol, because the probabilitythat the node k can decode the packet correctly, i.e. Prob(k ∈Π2|k ∈ Π1), is too small, compared with the energy cost ofparticipating in Phase I, given by Pon,r(k) ·ΔT1. On the otherhand, a node k, with a distance to the destination Dk,d > D2,does not participate in the cooperation protocol, because thecontribution of node k in Phase II is too small, compared withthe energy cost of participating in Phase II, i.e., Pon,t(k)·ΔT2.
2) Comments on the Distributed Space-time Coding: In thePhase II of CTP-SN, an implementation issue is to designspace-time codes able to provide the spatial diversity, underthe condition that the knowledge of Nr,2 is not available atindividual relay nodes. The requirement can be achieved byspace-time block codes [27]. More specifically, assume thatthe pre-designed space-time block code is of the size M ,and each relay node randomly picks up one of the M codes.Then, the diversity order Nr,2 can be achieved approximately,when M is much larger than E(Nr,2). Note that a similaridea, with predetermined instead of randomly-picked codes,has been considered in [10], [28].
Note that the same diversity order can also be achieved byrepetitive coding, if the Nr,2 nodes in Π2 can transmit onorthogonal channels, e.g. assuming a wideband scenario [29].Compared with the space-time coded approach, the tradeofffor the simplicity of repetitive coding can be a waste ofspectral resources.
3) Comments on Parameter Constraints: By Eqs. (8,12),given Ptot and R, there are two degrees of freedom on thesystem design, which are R1
R2and P1
P2, respectively. We note
that Eq. (12) is exact only for the CTP-SN protocol withoutfeedback. It should be modified when the feedback protocolis considered. Note that the destination node may be active inPhase I, even if it is not within Ar. Also there is a probabilitythat the energy consumption in Phase II is zero. However, inthe sequel we neglect this small difference, and compare theprotocols with and without feedback side by side under thesame setup of the parameters, P1, P2, R1, R2.
4) Comments on the Degrees of Freedom: Overall, thedegrees of freedom in the considered protocol are, D1, D2,R1R2
, and P1P2
. The impact of D1 and D2 on the protocolperformance is numerically discussed in Section V. The choicefor R1
R2and P1
P2introduces a problem of optimal resource
allocation, which is discussed is Section VI-B. However, allof them are independent from the main performance analysisresults of the paper, which are found in the next section.
IV. PERFORMANCE ANALYSIS
In this section, we provide the performance analysis ofCTP-SN by deriving the link capacity outage probability, andcompare the performance of CTP-SN with that of the directtransmission protocol. In presenting the results, we definethat the notation “f(x) ≈ g(x), when x → 0” indicates
“limx→0f(x)g(x) = 1”, where both f(x) and g(x) are functions
of x.
A. Direct Transmission Performance
In direct transmission, the SNR at the destination node d,γd|s, is,
γd|s =βs,d · Pt(s)
σ2n
. (13)
The outage probability, Pout,D, is a function of Ptot and R,that is,
Pout,D =(a) Prob(C(γd|s) < W · R)
=(b) Prob(log(1 + βs,d·Pt(s)
σ2n
)< R
)=(c) Prob
(βs,d <
(2R − 1
) · σ2n
Pt(s)
)=(d) 1− e−(2R−1)·
σ2n·Dn
s,dPt(s)·G .
(14)
In Eq. (14), (a) is the definition; (b) and (c) are obvious dueto Eq. (3,13); (d) is obtained by recalling that βs,d is anexponential random variable with the expected value of Eq.(2).
By substituting Eq. (6) into Eq. (14), we obtain,
Pout,D = 1− e−εD , (15)
where εD is defined as,
εD =
(2R − 1
) · (1 + α) · σ2n ·Dn
s,d
G · (Ptot − Pt,c − Pr,c) . (16)
Note that under the approximation, εD → 0, the followingholds,
Pout,D ≈ εD. (17)
B. CTP-SN Performance
1) Probabilistic Model on Π1 and Π2: According to thenetwork model in Eq. (1), the random subset of nodes Π1 isa Poisson process, with the density function λΠ1(x, y) givenby,
λΠ1(x, y) ={λ, (x, y) ∈ Ar ;0, (x, y) ∈ Ar .
(18)
Thus, Nr,1 is a Poisson distributed random variable with themean value,
E(Nr,1) = λ · |Ar|. (19)
Π2, on the other hand, is a marked Poisson process [23].For every node k ∈ Π1, the SNR of the node k in phase I,γk|s, is,
γk|s = βs,k·P1σ2
n
= G·P1σ2
n·Dns,k
.(20)
The probability that the node k belongs to Π2 is determinedby the capacity outage probability of the node k in Phase I,that is,
Prob (k ∈ Π2|k ∈ Π1) = Prob(C(γk|s) ≥W · R1
)= e−(2R1−1)·
σ2n·Dn
s,kP1·G .
(21)

2838 IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 5, NO. 10, OCTOBER 2006
Thus, according to Eq. (18), the density function of Π2 isgiven by,
λΠ2(x, y) =
⎧⎨⎩ λ · e−
(2R1−1)·σ2n·Dn
s (x,y)
P1·G , (x, y) ∈ Ar ;0, (x, y) ∈ Ar .
(22)where,
Ds(x, y) = ‖Ls − [x, y]‖. (23)
The mean value of the Poisson random variable Nr,2 is thusgiven by,
E (Nr,2) =∫ ∫
Ar
λΠ2(x, y)dxdy. (24)
Note that although it is difficult to obtain a closed formexpression for E (Nr,2), nevertheless it can be calculatednumerically.
2) Capacity Outage Probability: Given the probabilisticmodel on Π2, the SNR γd|Π2
of the destination in the space-time coded cooperation of Phase II, is given by, [30],
γd|Π2=∑k∈Π2
βk,d · P2
σ2n
, (25)
as opposed to what is obtained in the direct transmissionprotocol (Eq. (13)).
Thus, the capacity outage probability of the CTP-SN pro-tocol without feedback, Pout,C , is given by,
Pout,C = Prob(C(γd|Π2
) < W ·R2
)= Prob
(∑k∈Π2
βk,d <(2R2−1)·σ2
n
P2
)= Prob
(∑k∈Π2
1Dn
k,dζk <
(2R2−1)·σ2n
P2·G),
(26)where {ζk} is defined as a set of independent exponentialrandom variables, with the same mean value 1. The Dk,d =‖Lk − Ld‖, however, corresponds to the Poisson points ofanother inhomogeneous Poisson process Π3, which is ob-tained from Π2 according to the Mapping theorem of Poissonprocess [23]. Accordingly, the density function of Π3 is,
λΠ3(x) =∫ 2π
0
λΠ2 (Ld + [x · cos θ, x · sin θ]) · x · dθ. (27)
Now, Eq. (26) can be rewritten as,
Pout,C = Prob
( ∑k∈Π3
1xn· ζk < (2R2 − 1) · σ2
n
P2 ·G
). (28)
The capacity outage probability of the CTP-SN protocolwith feedback, P fout,C , is given by,
P fout,C = Pout,C · Prob(C(γd|s) ≤ R1
)= Pout,C · e−
(2R1−1)·σ2n·Dn
s,dP1·G
< Pout,C .
(29)
C. Asymptotic Approximations
Due to the inhomogeneous nature of Π3, Eq. (27), theclosed form of the outage probability Pout,C and P fout,C isunfortunately difficult to obtain. We derive an upper boundon Pout,C under the following asymptotic approximations.
Define ε1 and ε2 as,
ε1 = (2R1 − 1) · σ2n ·Dn
1
P1 ·G , (30)
and,
ε2 = (2R2 − 1) · σ2n ·Dn
2
P2 ·G , (31)
respectively. The approximations that we make are, ε1, ε2 →0.
In general, the approximations hold in the practically in-teresting scenario, where the outage probability is small. Notethat the approximations is uncorrelated with spectral efficiencyconditions. The implication of the asymptotic approximationsare discussed in Appendix I for both high and low spectralefficiency regimes. This suggests that, the results of ourstudy are applicable in both high and low spectral efficiencyconditions.
D. Asymptotic Upper Bound
The proof of Pout,C upper bound (Theorem 1) is based onthe following Lemma 1. The proofs of Lemma 1 and Theorem1 are given in Appendices II and III, respectively.
Lemma 1: Given a set of independent exponential randomvariables {ζk|k = 1 . . .K}, with the mean E(ζk) = 1, andε > 0, then,
limε→0
1εK
Prob
(K∑k=1
ζk < ε
)=
1K!
. (32)
Theorem 1: Under the approximations ε1, ε2 → 0, theoutage probability of CTP-SN, Pout,C , satisfies,
Pout,C ≤ E(
1Nr,2!
· εNr,22
). (33)
E. Main Results
Here, we discuss the behavior of the outage probabilityPout,C when the node density increases, under the asymptoticapproximations. The proofs of Theorems 2 and 3 are given inAppendices IV and V, respectively.
Theorem 2: Under the approximations ε1, ε2 → 0, theoutage probability of CTP-SN, Pout,C , is upper bounded by,
Pout,C < e−A·κ, (34)
where,κ = |Ar| · λ · e−ε1 ≈ |Ar| · λ, (35)
and A is a deterministic positive constant.Theorem 2 suggests that the outage probability of CTP-SN
decays exponentially, when the node density λ increases. CTP-SN is asymptotically much better than the direct transmissionbecause Pout,D is only a constant of εD in Eq. (17). Thisconclusion is also supported by the following Theorem 3.
SONG and HATZINAKOS: COOPERATIVE TRANSMISSION IN POISSON DISTRIBUTED WIRELESS SENSOR NETWORKS 2839
4 6 8 10 12 14 16 18 2010−5
10−4
10−3
10−2
10−1
100
P1 (dBm)
Out
age
Pro
babi
lity
Pout,C
Pout,Cf
Pout,D
Bound on Pout,C
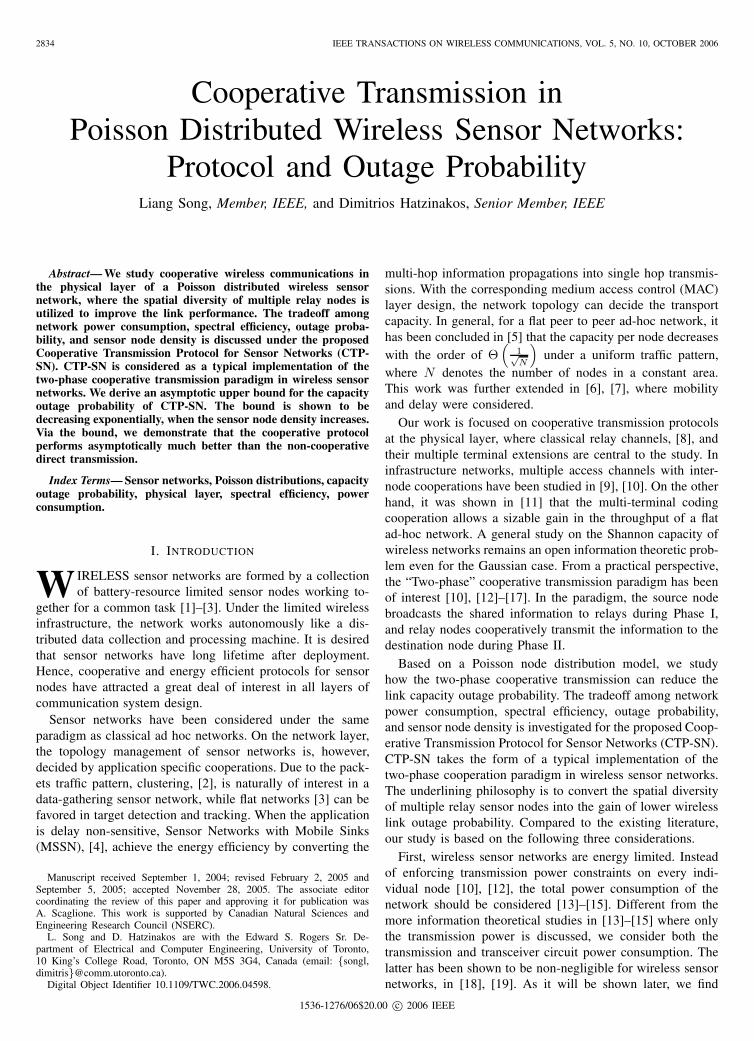
Fig. 2. Capacity outage probability vs. P1 (λ = 0.003/m2, Ds,d = D1 =D2 = 30m).
Theorem 3: Under the approximations, ε1, ε2 → 0, ∃ λ0, sothat the outage probability of the direct transmission, Pout,D,is lower bounded by,
Pout,D >A
|Ar| · λ, (36)
∀ λ > λ0, where A is a deterministic positive constant.
V. NUMERICAL RESULTS
The numerical analysis is performed under the systemparameters listed in Table 1. These parameters are consideredtypical in wireless sensor networks under a high spectralefficiency scenario, such as the IEEE 802.15.4 [31]. Wegenerate the set of Poisson points Π3, according to the densitygiven by Eq. (27). The outage probabilities of CTP-SN withand without feedback, P fout,C and Pout,C , are obtained byaveraging over 50000 Monte-Carlo runs. The results of thedirect transmission, Pout,D , under the same network powerconsumption Ptot in Eq. (12), is also provided for compar-isons. In all simulations, we fix R1
R2= 1 and P1
P2= 1.
TABLE I
SYSTEM PARAMETERS
Parameter Unit Value
n 4
G dB −31
σ2n dBm −92
Pt,c dBm 10
Pr,c dBm 10
α 2
R bit/s/Hz 1
The first set of results examine the variation of the outageprobability versus P1. Fig. 2 to Fig. 4 show the results whenthe source-destination distance Ds,d = 30, 50, 80 meters,respectively. Furthermore, in the figures, we fix D1 = D2 =Ds,d and λ = 0.003(1/m2). We first examine the behavior ofthe upper bound according to Theorem 2. When P1 increases,
4 6 8 10 12 14 16 18 2010−6
10−5
10−4
10−3
10−2
10−1
100
P1 (dBm)
Out
age
Pro
babi
lity
Pout,C
Pout,Cf
Pout,DBound on Pout,C
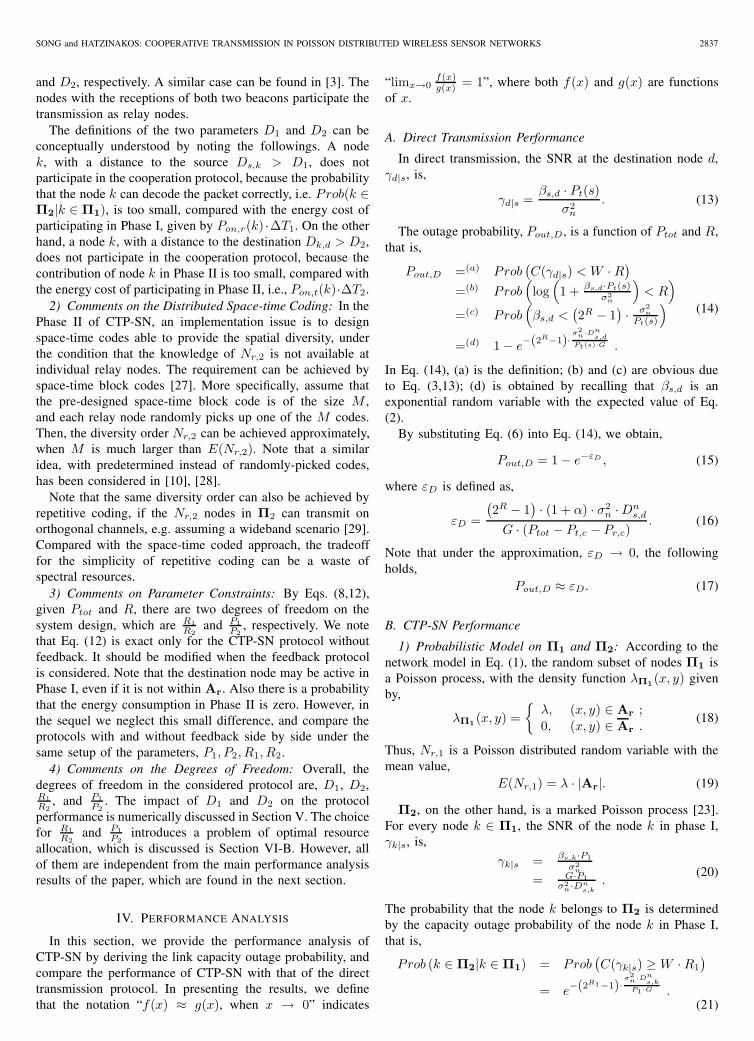
Fig. 3. Capacity outage probability vs. P1 (λ = 0.003/m2, Ds,d = D1 =D2 = 50m).
4 6 8 10 12 14 16 18 2010−10
10−8
10−6
10−4
10−2
100
P1 (dBm)
Out
age
Pro
babi
lity
Pout,C
Pout,Cf
Pout,DBound on Pout,C
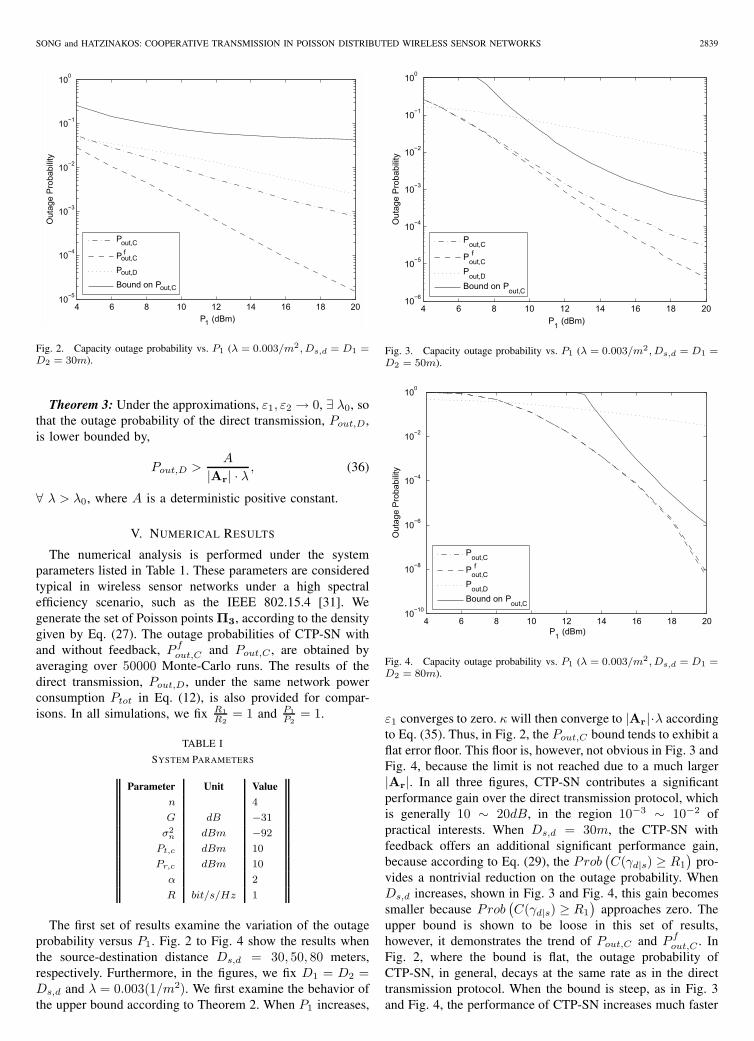
Fig. 4. Capacity outage probability vs. P1 (λ = 0.003/m2, Ds,d = D1 =D2 = 80m).
ε1 converges to zero. κ will then converge to |Ar|·λ accordingto Eq. (35). Thus, in Fig. 2, the Pout,C bound tends to exhibit aflat error floor. This floor is, however, not obvious in Fig. 3 andFig. 4, because the limit is not reached due to a much larger|Ar|. In all three figures, CTP-SN contributes a significantperformance gain over the direct transmission protocol, whichis generally 10 ∼ 20dB, in the region 10−3 ∼ 10−2 ofpractical interests. When Ds,d = 30m, the CTP-SN withfeedback offers an additional significant performance gain,because according to Eq. (29), the Prob
(C(γd|s) ≥ R1
)pro-
vides a nontrivial reduction on the outage probability. WhenDs,d increases, shown in Fig. 3 and Fig. 4, this gain becomessmaller because Prob
(C(γd|s) ≥ R1
)approaches zero. The
upper bound is shown to be loose in this set of results,however, it demonstrates the trend of Pout,C and P fout,C . InFig. 2, where the bound is flat, the outage probability ofCTP-SN, in general, decays at the same rate as in the directtransmission protocol. When the bound is steep, as in Fig. 3and Fig. 4, the performance of CTP-SN increases much faster
2840 IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 5, NO. 10, OCTOBER 2006
2 2.5 3 3.5 4 4.5 5
x 10−3
10−5
10−4
10−3
10−2
10−1
100
λ (1/m2)
Out
age
Pro
babi
lity
Pout,C
Pout,Cf
Pout,DBound on Pout,C
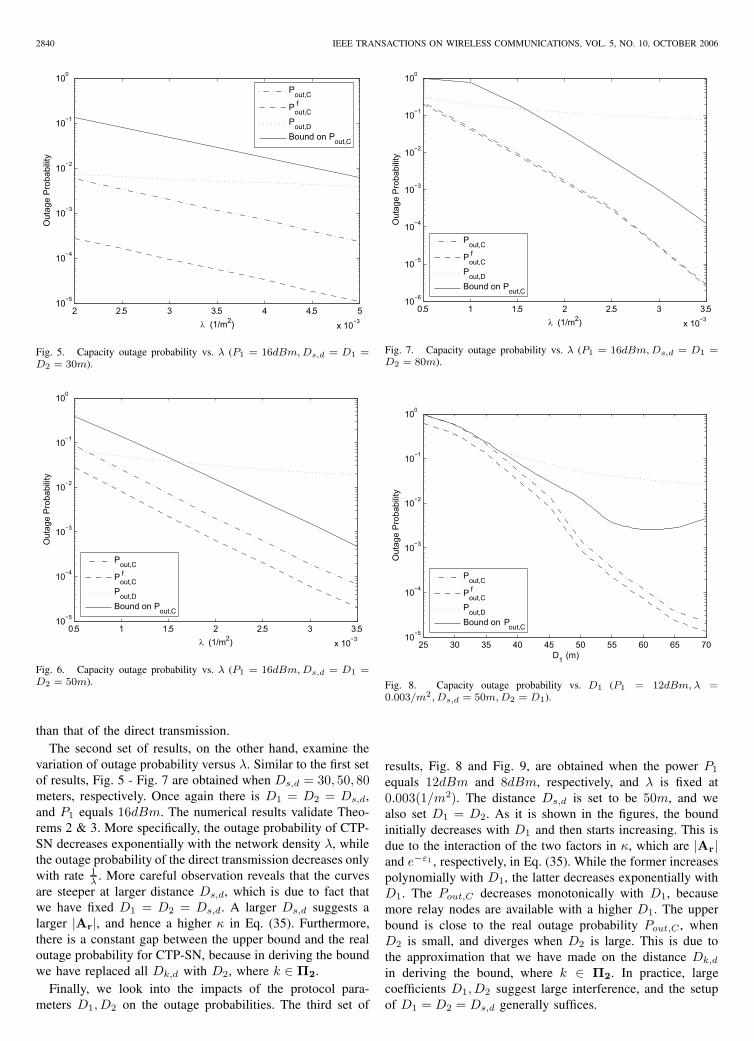
Fig. 5. Capacity outage probability vs. λ (P1 = 16dBm, Ds,d = D1 =D2 = 30m).
0.5 1 1.5 2 2.5 3 3.5
x 10−3
10−5
10−4
10−3
10−2
10−1
100
λ (1/m2)
Out
age
Pro
babi
lity
Pout,C
Pout,Cf
Pout,DBound on Pout,C
Fig. 6. Capacity outage probability vs. λ (P1 = 16dBm, Ds,d = D1 =D2 = 50m).
than that of the direct transmission.The second set of results, on the other hand, examine the
variation of outage probability versus λ. Similar to the first setof results, Fig. 5 - Fig. 7 are obtained when Ds,d = 30, 50, 80meters, respectively. Once again there is D1 = D2 = Ds,d,and P1 equals 16dBm. The numerical results validate Theo-rems 2 & 3. More specifically, the outage probability of CTP-SN decreases exponentially with the network density λ, whilethe outage probability of the direct transmission decreases onlywith rate 1
λ . More careful observation reveals that the curvesare steeper at larger distance Ds,d, which is due to fact thatwe have fixed D1 = D2 = Ds,d. A larger Ds,d suggests alarger |Ar|, and hence a higher κ in Eq. (35). Furthermore,there is a constant gap between the upper bound and the realoutage probability for CTP-SN, because in deriving the boundwe have replaced all Dk,d with D2, where k ∈ Π2.
Finally, we look into the impacts of the protocol para-meters D1, D2 on the outage probabilities. The third set of
0.5 1 1.5 2 2.5 3 3.5
x 10−3
10−6
10−5
10−4
10−3
10−2
10−1
100
λ (1/m2)
Out
age
Pro
babi
lity
Pout,C
Pout,Cf
Pout,DBound on Pout,C
Fig. 7. Capacity outage probability vs. λ (P1 = 16dBm, Ds,d = D1 =D2 = 80m).
25 30 35 40 45 50 55 60 65 7010−5
10−4
10−3
10−2
10−1
100
D1 (m)
Out
age
Pro
babi
lity
Pout,C
Pout,Cf
Pout,DBound on Pout,C
Fig. 8. Capacity outage probability vs. D1 (P1 = 12dBm, λ =0.003/m2, Ds,d = 50m, D2 = D1).
results, Fig. 8 and Fig. 9, are obtained when the power P1
equals 12dBm and 8dBm, respectively, and λ is fixed at0.003(1/m2). The distance Ds,d is set to be 50m, and wealso set D1 = D2. As it is shown in the figures, the boundinitially decreases with D1 and then starts increasing. This isdue to the interaction of the two factors in κ, which are |Ar|and e−ε1 , respectively, in Eq. (35). While the former increasespolynomially with D1, the latter decreases exponentially withD1. The Pout,C decreases monotonically with D1, becausemore relay nodes are available with a higher D1. The upperbound is close to the real outage probability Pout,C , whenD2 is small, and diverges when D2 is large. This is due tothe approximation that we have made on the distance Dk,d
in deriving the bound, where k ∈ Π2. In practice, largecoefficients D1, D2 suggest large interference, and the setupof D1 = D2 = Ds,d generally suffices.
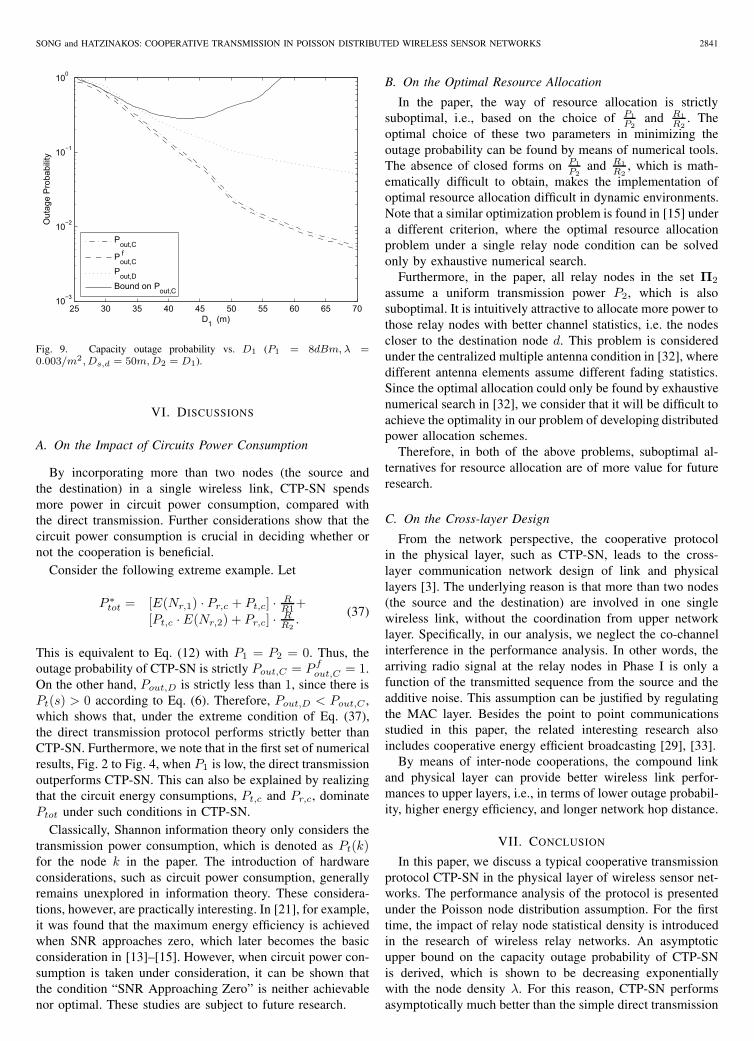
SONG and HATZINAKOS: COOPERATIVE TRANSMISSION IN POISSON DISTRIBUTED WIRELESS SENSOR NETWORKS 2841
25 30 35 40 45 50 55 60 65 7010−3
10−2
10−1
100
D1 (m)
Out
age
Pro
babi
lity
Pout,C
Pout,Cf
Pout,DBound on Pout,C
Fig. 9. Capacity outage probability vs. D1 (P1 = 8dBm, λ =0.003/m2, Ds,d = 50m, D2 = D1).
VI. DISCUSSIONS
A. On the Impact of Circuits Power Consumption
By incorporating more than two nodes (the source andthe destination) in a single wireless link, CTP-SN spendsmore power in circuit power consumption, compared withthe direct transmission. Further considerations show that thecircuit power consumption is crucial in deciding whether ornot the cooperation is beneficial.
Consider the following extreme example. Let
P ∗tot = [E(Nr,1) · Pr,c + Pt,c] · RR1+[Pt,c ·E(Nr,2) + Pr,c] · RR2
.(37)
This is equivalent to Eq. (12) with P1 = P2 = 0. Thus, theoutage probability of CTP-SN is strictly Pout,C = P fout,C = 1.On the other hand, Pout,D is strictly less than 1, since there isPt(s) > 0 according to Eq. (6). Therefore, Pout,D < Pout,C ,which shows that, under the extreme condition of Eq. (37),the direct transmission protocol performs strictly better thanCTP-SN. Furthermore, we note that in the first set of numericalresults, Fig. 2 to Fig. 4, when P1 is low, the direct transmissionoutperforms CTP-SN. This can also be explained by realizingthat the circuit energy consumptions, Pt,c and Pr,c, dominatePtot under such conditions in CTP-SN.
Classically, Shannon information theory only considers thetransmission power consumption, which is denoted as Pt(k)for the node k in the paper. The introduction of hardwareconsiderations, such as circuit power consumption, generallyremains unexplored in information theory. These considera-tions, however, are practically interesting. In [21], for example,it was found that the maximum energy efficiency is achievedwhen SNR approaches zero, which later becomes the basicconsideration in [13]–[15]. However, when circuit power con-sumption is taken under consideration, it can be shown thatthe condition “SNR Approaching Zero” is neither achievablenor optimal. These studies are subject to future research.
B. On the Optimal Resource Allocation
In the paper, the way of resource allocation is strictlysuboptimal, i.e., based on the choice of P1
P2and R1
R2. The
optimal choice of these two parameters in minimizing theoutage probability can be found by means of numerical tools.The absence of closed forms on P1
P2and R1
R2, which is math-
ematically difficult to obtain, makes the implementation ofoptimal resource allocation difficult in dynamic environments.Note that a similar optimization problem is found in [15] undera different criterion, where the optimal resource allocationproblem under a single relay node condition can be solvedonly by exhaustive numerical search.
Furthermore, in the paper, all relay nodes in the set Π2
assume a uniform transmission power P2, which is alsosuboptimal. It is intuitively attractive to allocate more power tothose relay nodes with better channel statistics, i.e. the nodescloser to the destination node d. This problem is consideredunder the centralized multiple antenna condition in [32], wheredifferent antenna elements assume different fading statistics.Since the optimal allocation could only be found by exhaustivenumerical search in [32], we consider that it will be difficult toachieve the optimality in our problem of developing distributedpower allocation schemes.
Therefore, in both of the above problems, suboptimal al-ternatives for resource allocation are of more value for futureresearch.
C. On the Cross-layer Design
From the network perspective, the cooperative protocolin the physical layer, such as CTP-SN, leads to the cross-layer communication network design of link and physicallayers [3]. The underlying reason is that more than two nodes(the source and the destination) are involved in one singlewireless link, without the coordination from upper networklayer. Specifically, in our analysis, we neglect the co-channelinterference in the performance analysis. In other words, thearriving radio signal at the relay nodes in Phase I is only afunction of the transmitted sequence from the source and theadditive noise. This assumption can be justified by regulatingthe MAC layer. Besides the point to point communicationsstudied in this paper, the related interesting research alsoincludes cooperative energy efficient broadcasting [29], [33].
By means of inter-node cooperations, the compound linkand physical layer can provide better wireless link perfor-mances to upper layers, i.e., in terms of lower outage probabil-ity, higher energy efficiency, and longer network hop distance.
VII. CONCLUSION
In this paper, we discuss a typical cooperative transmissionprotocol CTP-SN in the physical layer of wireless sensor net-works. The performance analysis of the protocol is presentedunder the Poisson node distribution assumption. For the firsttime, the impact of relay node statistical density is introducedin the research of wireless relay networks. An asymptoticupper bound on the capacity outage probability of CTP-SNis derived, which is shown to be decreasing exponentiallywith the node density λ. For this reason, CTP-SN performsasymptotically much better than the simple direct transmission

2842 IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 5, NO. 10, OCTOBER 2006
protocol. Some important related research directions are thenpresented on the information theoretic energy efficiency, theoptimal/suboptimal resource allocation, and the cross-layernetwork design, respectively.
APPENDIX ION THE IMPLICATIONS OF THE ASYMPTOTIC
APPROXIMATIONS
In the high spectral efficiency regime, it is obvious thatthe approximations ε1, ε2 → 0 are equivalent to a high SNRapproximation.
In the low spectral efficiency regime, i.e., R1, R2 → 0, theε1 and ε2, defined in Eq. (30) and Eq. (31) respectively, canbe written as,
ε1 =ln 2 · R1 ·W ·N0 ·Dn
1
P1 ·G , (38)
andε2 =
ln 2 · R2 ·W ·N0 ·Dn1
P1 ·G . (39)
Thus, given the parameters {W,R1, R2} as {Wh, Rh1 , Rh2}
for the high spectral efficiency regime, and {W l, Rl1, Rl2}
for the low spectral efficiency regime, the two scenarios areequivalent in our study under the following conditions,
(2Rh1 − 1) ·Wh = ln 2 · Rl1 ·W l, (40)
and,(2R
h2 − 1) ·Wh = ln 2 · Rl2 ·W l. (41)
It is evident from Eqs. (40,41) that it is more energy efficientto operate in the low spectral efficiency regime, given thetransmission rate constraints W · R1 and W ·R2.
APPENDIX IIPROOF OF LEMMA 1
Let pK(x) denote the probability density function of∑Kk=1 ζk , there is [24],
pK(x) =
{xK−1
(K−1)!e−x, x ≥ 0
0, x < 0. (42)
Then, Lemma 1 is proven by the following,
limε→01εK Prob
(∑Kk=1 ζk < ε
)= limε→0
1εK
∫ ε0
1(K−1)!x
K−1e−xdx= limε→0
1(K−1)! · ( 1
K +O(ε))= 1
K! .
(43)
APPENDIX IIIPROOF OF THEOREM 1
Theorem 1 is proven by the following,
Pout,C =(a) Prob(∑
k∈Π2
1Dn
k,dζk <
(2R2−1)·σ2n
P2·G)
≤(b) Prob(∑
k∈Π2
1Dn
2ζk <
(2R2−1)·σ2n
P2·G)
=(c)∑∞K=0 Prob(Nr,2 = K)·
Prob(∑K
k=1 ζk < ε2
)≈(d)
∑∞K=0 Prob(Nr,2 = K) · 1
K!εK2
=(e) E(
1Nr,2!
· εNr,22
).
(44)
In Eq. (44), (a) follows directly from Eq. (26); (b) is due tothe fact that D2 ≥ Dk,d, ∀ k ∈ Π2, and ζk > 0, ∀ k; (c)is based on the observation that (b) depends only on the sizeof Poisson points in Π2, Nr,2; (d) is due to Lemma 1 andε2 → 0; (e) is straightforward.
APPENDIX IVPROOF OF THEOREM 2
Due to the definition of Ar, we have Ds(x, y) ≤ D1, ∀[x, y] ∈ Ar. Thus, from Eq. (22), we obtain,
λΠ2(x, y) ≥ λΠ1(x, y) · e−(2R1−1)·σ2
n·Dn1
P1·G
= λΠ1(x, y) · e−ε1=
{λ · e−ε1 , [x, y] ∈ Ar
0, [x, y] ∈ Ar.
(45)
By means of Eqs. (24,45), we get,
E(Nr,2) ≥ |Ar| · λ · e−ε1= κ .
(46)
Then,
Pout,C ≤(a) E(
1Nr,2!
· εNr,22
)=(b) e−E(Nr,2) ·∑∞k=0
E(Nr,2)k·εk
2(k!)2
<(c) e−E(Nr,2) ·∑∞k=0E(Nr,2)
k·εk2
(k!)
=(d) e−(1−ε2)·E(Nr,2)
<(e) e−(1−ε2)·κ .
(47)
In Eq. (47), (a) follows directly from Theorem 1; (b) is due tothe Poisson distribution of Nr,2; (c) and (d) are straightforwardmathematics; (e) results from Eq. (46). Theorem 2 is provenby defining A > 1− ε2.
APPENDIX VPROOF OF THEOREM 3
We first show that the condition ε1, ε2 → 0 implies εD → 0(Eq. (16)). Since D1 +D2 > Ds,d, without loss of generality,we assume D1 >
Ds,d
2 . The condition, εD → 0, is proven by,
εD =(a) (2R−1)·(1+α)·σ2n·Dn
s,d
G·(Ptot−Pt,c−Pr,c)
<(b) 2n · (2R1−1)·σ2
n·Dn1
G·P1
=(c) 2n · ε1 .(48)
In Eq. (48), (a) is by the definition in Eq. (16); (b) is obtaineddue to the fact, D1 >
Ds,d
2 , R < R1, and P1 <Ptot−Pt,c−Pr,c
1+α ;(c) is obtained directly from the definition of ε1 in Eq. (30).
Given εD → 0, from Eq. (17), it is,
Pout,D >(2R−1)·(1+α)·σ2
n·Dns,d
G·Ptot
= A1Ptot
,(49)
where A1 is defined as a positive constant.From Eq. (12), we also obtain,
Ptot < E(Nr,1) · A2 +A3, (50)
where A2, A3 are also positive constants.Combining Eqs. (49,50), and by Eq. (19), we have,
Pout,D > A1E(Nr,1)·A2+A3
= A1|Ar|·λ·A2+A3 .
(51)
Then, the statement in Theorem 3 is proven by defining A <A1A2
, in straightforward.
SONG and HATZINAKOS: COOPERATIVE TRANSMISSION IN POISSON DISTRIBUTED WIRELESS SENSOR NETWORKS 2843
REFERENCES
[1] I. F. Akyildiz, W. Su, Y. Sankasubramaniam, and E. Cayirci, “A surveyon sensor networks,” IEEE Commun. Mag., vol. 40, no. 8, pp. 102–114,Aug. 2002.
[2] W. B. Heinzelman and A. P. Chandrakasan, “An application-specificprotocol architecture for wireless microsensor networks,” IEEE Trans.Wireless Commun., vol. 1, no. 4, pp. 660–670, Apr. 2002.
[3] L. Song and D. Hatzinakos, “A cross-layer architecture of wirelesssensor networks for target tracking,” IEEE/ACM Trans. Networking, tobe published.
[4] ——, “Dense sensor networks with mobile sinks,” in Proc. IEEEInternational Conference on Acoustics, Speech and Signal Processing(ICASSP) 2005, vol. 3, pp. 677–680.
[5] P. Gupta and P. R. Kumar, “The capacity of wireless networks,” IEEETrans. Inf. Theory, vol. 46, no. 2, pp. 388–404, Mar. 2000.
[6] M. Grossglauser and D. Tse, “Mobility increases the capacity of adhocwireless networks,” IEEE/ACM Trans. Networking, vol. 10, no. 4, pp.477–486, Aug. 2002.
[7] S. Toumpis and A. J. Goldsmith, “Capacity bounds for large wirelessnetworks under fading and node mobility,” in Proc. Allerton Conferenceon Communications, Control, and Computing 2003.
[8] T. M. Cover and J. A. Thomas, Elements of Information Theory. NewYork, NY: John Wiley & Sons, Inc., 1991.
[9] A. Sendonaris, E. Erkip, and B. Aazhang, “User cooperation diversity–part 1: system description,” IEEE Trans. Commun., vol. 51, no. 11, pp.1927–1938, Nov. 2003.
[10] J. N. Laneman and G. W. Wornell, “Distributed space-time codedprotocols for exploiting cooperative diversity in wireless networks,”IEEE Trans. Inf. Theory, vol. 49, no. 10, pp. 2415–2425, Oct. 2003.
[11] P. Gupta and P. R. Kumar, “Towards an information theory of largenetworks: an achievable rate region,” IEEE Trans. Inf. Theory, vol. 49,no. 8, pp. 1877–1894, Aug. 2003.
[12] J. N. Laneman and G. W. Wornell, “Cooperative diversity in wirelessnetworks: efficient protocols and outage behavior,” IEEE Trans. Inf.Theory, vol. 50, no. 12, pp. 3062–3080, Dec. 2004.
[13] O. Oyman and A. J. Paulraj, “Spectral efficiency of relay networks inthe power-limited regime,” in Proc. Allerton Conference on Communi-cations, Control, and Computing 2004.
[14] A. Dana and B. Hassibi, “On the power efficiency of sensory and ad-hocwireless networks,” IEEE Trans. Inf. Theory, submitted for publication.
[15] Y. Yao, X. Cai, and G. B. Giannakis, “On energy efficiency and opti-mal resource allocation of relay transmissions,” IEEE Trans. WirelessCommun., submitted for publication.
[16] K. Azarian, H. E. Camal, and P. Schniter, “On the achievable diversitymultiplexing tradeoff in half-duplex cooperative channels,” in Proc.Allerton Conference on Communications, Control, and Computing 2004.
[17] M. Gastpar and M. Vetterli, “On the capacity of wireless networks: Therelay case,” in Proc. IEEE 21st Conference on Computer Communica-tions (INFOCOM) 2002, vol. 3, pp. 1577–1586.
[18] R. Min, “Energy and quality scalable wireless communication,” Ph.D.dissertation, Massachusetts Institute of Technology, May 2003.
[19] S. Cui, A. J. Goldsmith, and A. Bahai, “Energy-efficient of mimo andcooperative MIMO techniques in sensor networks,” IEEE J. Sel. AreasCommun., vol. 22, no. 6, pp. 1089–1098, Aug. 2004.
[20] A. J. Goldsmith and P. P. Varaiya, “Capacity of fading channels withchannel side information,” IEEE Trans. Inf. Theory, vol. 43, no. 6, pp.1986–1992, Nov. 1997.
[21] S. Verdu, “Spectral efficiency in wideband region,” IEEE Trans. Inf.Theory, vol. 48, no. 6, pp. 1319–1343, June 2002.
[22] L. H. Ozarow, S. Shamai, and A. D. Wyner, “Information theoreticconsiderations for cellular mobile radio,” IEEE Trans. Veh. Technol.,vol. 43, no. 5, pp. 359–378, May 1994.
[23] J. F. C. Kingman, Poisson Processes. Oxford, UK: Clarendon Press,1993.
[24] A. Papoulis and S. U. Pillai, Probability, Random Variable and Stochas-tic Processes. McGraw-Hill Higher Education, 2002.
[25] H. L. Bertoni, Radio Propogation for Modern Wireless Systems. PrenticeHall PTR, 2000.
[26] S. Cui, A. Goldsmith, and A. Bahai, “Modulation optimization underenergy constraints,” in Proc. IEEE International Conference on Com-munications (ICC) 2003, vol. 4, pp. 2805–2811.
[27] V. Tarokh, N. Seshadri, and A. R. Calderbank, “Space-time block codesfrom orthogonal designs,” IEEE Trans. Inf. Theory, vol. 45, no. 5, pp.1456–1467, July 1999.
[28] P. Maurer, V. Tarokh, and R. Calderbank, “Transmit diversity when thereceiver does not know the number of transmit antennas,” in Proc. 2001Canadian Workshop on Information Theory.
[29] I. Maric and R. D. Yates, “Cooperative multihop broadcast for wirelessnetworks,” IEEE J. Sel. Areas Commun., vol. 22, no. 6, pp. 1080–1088,Aug. 2004.
[30] E. Telatar, “Capacity of multi-antenna gaussian channels,” EuropeanTrans. Telecommun., vol. 10, pp. 585–595, Nov. 1999.
[31] MAC and PHY Layer Specification for Low-rate Wireless Personal AreaNetworks (PR-WPANs), IEEE Std. 802.15.4, 2003.
[32] W. Weicheselberger and K. Hugl, “Optimum power allocation for trans-mit diversity in mobile communications,” in Proc. 10th InternationalConference on Telecommunications, vol. 2, pp. 1555–1560.
[33] A. Scaglione and Y. W. Hong, “Opportunistic large arrays: Cooperativetransmission in wireless multihop ad hoc networks to reach far dis-tances,” IEEE Trans. Signal Processing, vol. 51, no. 8, pp. 2082–2092,Aug. 2003.
Liang Song received the Bachelor degree in Electri-cal Engineering from Shanghai Jiaotong University,China, in 1999; and the M.S. degree in ElectronicEngineering from Fudan University, China, in 2002.He obtained the Ph.D. degree from the EdwardS. Rogers Sr. Department of Electrical and Com-puter Engineering, University of Toronto, Canada,in 2005. His research interests and expertise arein the area of signal processing, communications,networking, and information theory, with the focuson the applications in wireless sensor and perva-
sive computing networks. His experience also includes industrial consultingthrough SENNET Communications and CANAMET Inc..
Dimitrios Hatzinakos received the Diploma degreefrom the University of Thessaloniki, Greece, in1983, the M.A.Sc degree from the University ofOttawa, Canada, in 1986 and the Ph.D. degree fromNortheastern University, Boston, MA, in 1990, allin Electrical Engineering. In September 1990 hejoined the Department of Electrical and ComputerEngineering, University of Toronto, where now heholds the rank of Professor with tenure. Also, heserved as Chair of the Communications Group ofthe Department during the period July 1999 to June
2004. Since November 2004, he is the holder of the Bell Canada Chair inMutimedia, at the University of Toronto. His research interests are in the areasof Multimedia Signal Processing and Communications. He is author/co-authorof more than 150 papers in technical journals and conference proceedings andhe has contributed to eight books in his areas of interest. His experienceincludes consulting through Electrical Engineering Consociates Ltd. andcontracts with United Signals and Systems Inc., Burns and Fry Ltd., PipetronixLtd., Defense Research Establishment Ottawa (DREO), Nortel Networks,Vivosonic Inc. and CANAMET Inc. He has served as an Associate Editorfor the IEEE Transactions on Signal Processing from 1998 till 2002 andGuest Editor for the special issue of Signal Processing, Elsevier, on SignalProcessing Technologies for Short Burst Wireless Communications whichappeared in October 2000. He was a member of the IEEE Statistical Signaland Array Processing Technical Committee (SSAP) from 1992 till 1995 andTechnical Program co-Chair of the 5th Workshop on Higher-Order Statisticsin July 1997. He is a senior member of the IEEE and member of EURASIP,the Professional Engineers of Ontario (PEO), and the Technical Chamber ofGreece.
Related Documents











