N.E. Leonard – U. Pisa – 18-20 April 2007 Slide 1 Cooperative Control and Mobile Sensor Networks Cooperative Control, Part I, D-F Naomi Ehrich Leonard Mechanical and Aerospace Engineering Princeton University and Electrical Systems and Automation University of Pisa [email protected], www. princeton . edu/~naomi

Cooperative Control and Mobile Sensor Networks
Feb 22, 2016
Cooperative Control and Mobile Sensor Networks Cooperative Control, Part I, D-F. Naomi Ehrich Leonard Mechanical and Aerospace Engineering Princeton University and Electrical Systems and Automation University of Pisa - PowerPoint PPT Presentation
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 1
Cooperative Control and Mobile Sensor Networks
Cooperative Control, Part I, D-F
Naomi Ehrich Leonard
Mechanical and Aerospace EngineeringPrinceton University
and Electrical Systems and Automation University of Pisa
[email protected], www.princeton.edu/~naomi

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 2
Outline and Key References
A. Artificial Potentials and Projected Gradients:
R. Bachmayer and N.E. Leonard. Vehicle networks for gradient descent in a sampled environment. In Proc. 41st IEEE CDC, 2002.
B. Artificial Potentials and Virtual Beacons:
N.E. Leonard and E. Fiorelli. Virtual leaders, artificial potentials and coordinated control of groups. In Proc. 40th IEEE CDC, pages 2968-2973, 2001.
C. Artificial Potentials and Virtual Bodies with Feedback Dynamics:
P. Ogren, E. Fiorelli and N.E. Leonard. Cooperative control of mobile sensor networks: Adaptive gradient climbing in a distributed environment. IEEE Transactions on Automatic Control, 49:8, 2004.

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 3
Outline and Key ReferencesD. Virtual Tensegrity Structures:
B. Nabet and N.E. Leonard. Shape control of a multi-agent system using tensegrity structures. In Proc. 3rd IFAC Wkshp on Lagrangian and Hamiltonian Methods for Nonlinear Control, 2006.
E. Networks of Mechanical Systems and Rigid Bodies:
S. Nair, N.E. Leonard and L. Moreau. Coordinated control of networked mechanical systems with unstable dynamics. In Proc. 42nd IEEE CDC, 2003.
T.R. Smith, H. Hanssmann and N.E. Leonard. Orientation control of multiple underwater vehicles. In Proc. 40th IEEE CDC, pages 4598-4603, 2001.
S. Nair and N.E. Leonard. Stabilization of a coordinated network of rotating rigid bodies. In Proc. 43rd IEEE CDC, pages 4690-4695, 2004.
F. Curvature Control and Level Set Tracking:
F. Zhang and N.E. Leonard. Generating contour plots using multiple sensor platforms. In Proc. IEEE Swarm Intelligence Symposium, 2005.

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 4
D. Virtual Tensegrity Structureswith Ben Nabet

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 5
Real cables do not increase in length and real struts do not decrease in length.
(see papers by R. Connelly)
Linear Model

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 6
Potential

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 7
This fixes the shape of the equilibria but not the size.
Equilibria

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 8
Nonlinear Model

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 9
Potential

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 10
Equilibria

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 11

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 12
Shape Change
Choose a path from initial to final configuration that consists of a path of stable tensegrity structures.
Can then prove boundedness of transient and convergence to final structure.

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 13
CableStrut
Initial shape
Finalshape

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 14
Multi-Scale Shape Change
QuickTime™ and aCinepak decompressor
are needed to see this picture.

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 15
E. Networks of Mechanical Systems/Rigid Bodies
• Geometric framework: Method of Controlled Lagrangians with A.M. Bloch and J.E. Marsden
- Energy shaping for stabilization of (otherwise unstable) underactuated mechanical systems.
- Restrict to control dynamics that derive from a Lagrangian.
- Theory is constructive for certain classes: Synthesis!
also D.E. Chang and C.A. Woolsey, P.S. Krishnaprasad, G. Sanchez de Alvarez,see also IDA-PBC method – Blankenstein, Ortega, Spong, van der Schaft et al

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 16
Method of Controlled Lagrangians• Given a mechanical system, possibly underactuated and possibly with unstable dynamics.
• Design Lc so corresponding Euler-Lagrange equations match original equations with control law.
• Matching conditions are PDE’s.
• For certain classes of systems, use structured modification Lc of L - Q=S x G. L invariant to G. Shape kinetic energy metric. - Modify potential energy to break symmetry (if desired).
• Yields parametrized family of Lc that satisfy matching conditions.
• Theory provides conditions on (control) parameters for stability:
s
g m
Ml
u- Construct energy function.- Consider dissipation and asymptotic stability
Bloch, Leonard, Marsden, IEEE TAC, 2000, 2001
N.E. Leonard – U. Pisa – 18-20 April 2007Slide 17
Coordination
• Design artificial potentials to couple N individual systems. - Relative position/orientation of vehicle pairs. - Potential well = desired group configuration.
• Treat coupled multi-body system with same approach as for individual. - Symmetry group G for Hamiltonian + potentials. - Reduce action of G on phase space. - Construct energy function to prove:
Individual dynamics are stabilized and group is stably coordinated.
Nair and Leonard; Smith, Hanssmann and Leonard

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 18
Role of Symmetry
• Potentials will break symmetry:
E.g., consider N vehicles and Q = SE(3) x . . . x SE(3)
Suppose Q is original symmetry group.
- Break N-1 copies of SO(3) to align orientations. - Break N-1 copies of SE(3) to align and distribute. - Break N copies of SO(3) to align and to orient whole group, etc.
• Break symmetry for coordination and group cohesion.
• Preserve symmetries when control authority is limited.
• Discrete symmetries in homogeneous group with no ordering.
N times

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 19
Same Features as in Particle Systems
• Distributed control.
• Neighborhood of each vehicle can be prescribed. (Global info not required)
• No ordering of vehicles is necessary. Provides robustness to failure.
• Vehicles are interchangeable.
Illustrations:
A. Two (underwater) vehicles in SE(3)
B. N inverted-pendulum-on-cart systems.

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 20
A: Coordinated Orientation of 2 Vehicles in SE(3)
A
B
A
B
with Troy Smith and Heinz Hanssmann

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 21
Introduce Artificial Potential

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 22
Reduced System

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 23
Underwater Vehicles
QuickTime™ and aYUV420 codec decompressor
are needed to see this picture.

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 24
B: Coordination of Mechanical Systems with Unstable Dynamicswith Sujit Nair
Extend controlled Lagrangians to collection of unstablemechanical systems with controlled coupling.
• Class of systems includes inverted pendulum on a cart.
• Goal: Stabilize each pendulum in the upright position while synchronizing the motion of the carts.

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 25
Extension to Network of Systems
s
g m
Mlu
c sin
y

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 26
Expl
orin
g Sc
alar
Fie
lds
Generating a contour plot with three clusters:
QuickTime™ and aCinepak decompressor
are needed to see this picture.
Fumin Zhang and N.E. Leonard, Proc. IEEE Swarm Symposium, 2005
Curvature Control and Level Set Tracking

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 27
Filte
r Des
ign
2r
3r
4r
cr1r
Four moving sensor platforms, each takes one measurement a time:
Taylor Series:

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 28
Filte
r Des
ign
Filtering problem:
From a series of measurements
find and at the center.
Step k-1: Step k:

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 29
Filte
r Des
ign
Step k-1: Step k:
Prediction:

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 30
Update:
Filte
r Des
ign
Find that minimizes
We get:
error covariance of predictionerror covariance of measurements

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 31
Estimate:
Filte
r Des
ign
2r
3r
4r
cr
cD
cxD
cyDa
b
1r
y
A special arrangement to simplify the estimators
x

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 32
Estimate:
Filte
r Des
ign
How to estimate the Hessian
We have a prediction

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 33
Estimate:
Filte
r Des
ign
2r
3r
4r
cr
Er
Jr
cDED
KD
1r
FrKr
JD
Assuming formation is small enough
FD

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 34
Filte
r Des
ign
We now know the Hessian:

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 35
Find and that minimize the mean square error L.
Form
atio
n D
esig
n
Estimation Error:
Error in estimate of field value at center.
Error in estimate of gradient at center.
Optimization:

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 36
Form
atio
n D
esig
n
Optimization:
General solutions are numerical.We found analytical solutions when B is diagonal.
[Ögren, Fiorelli and Leonard 04],[FZ, Leonard SIS05][FZ, Leonard CDC06].
Covariance matrix of updated measurements Error in estimate of first diag. el. of Hessian

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 37
1. Achieve the cross formation with optimal shape and .
2. Align the horizontal axis of the formation with the tangent vector to the level curve at the center.
3. Control the motion of the center to go along the desired level curve.
*b*a
We get a contour plot with gradient estimates along the level curve.
Coo
pera
tive
Con
trol
Goals for cooperative controllers:

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 38
Coo
pera
tive
Con
trol
1r 2r4r
3r
1q2q
3q
Jacobi Vectors:

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 39
Coo
pera
tive
Con
trol
Decoupled Dynamics:
where and
FormationCenter

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 40
Coo
pera
tive
Con
trol
2r
3r
4r*a
*b1r 1x1y
Formation Control:

N.E. Leonard – U. Pisa – 18-20 April 2007Slide 41
Trac
king
Lev
el C
urve
s
Reduced center dynamics:
)(sr
1x1y
Boundary tracking is a special case.
N.E. Leonard – U. Pisa – 18-20 April 2007Slide 42
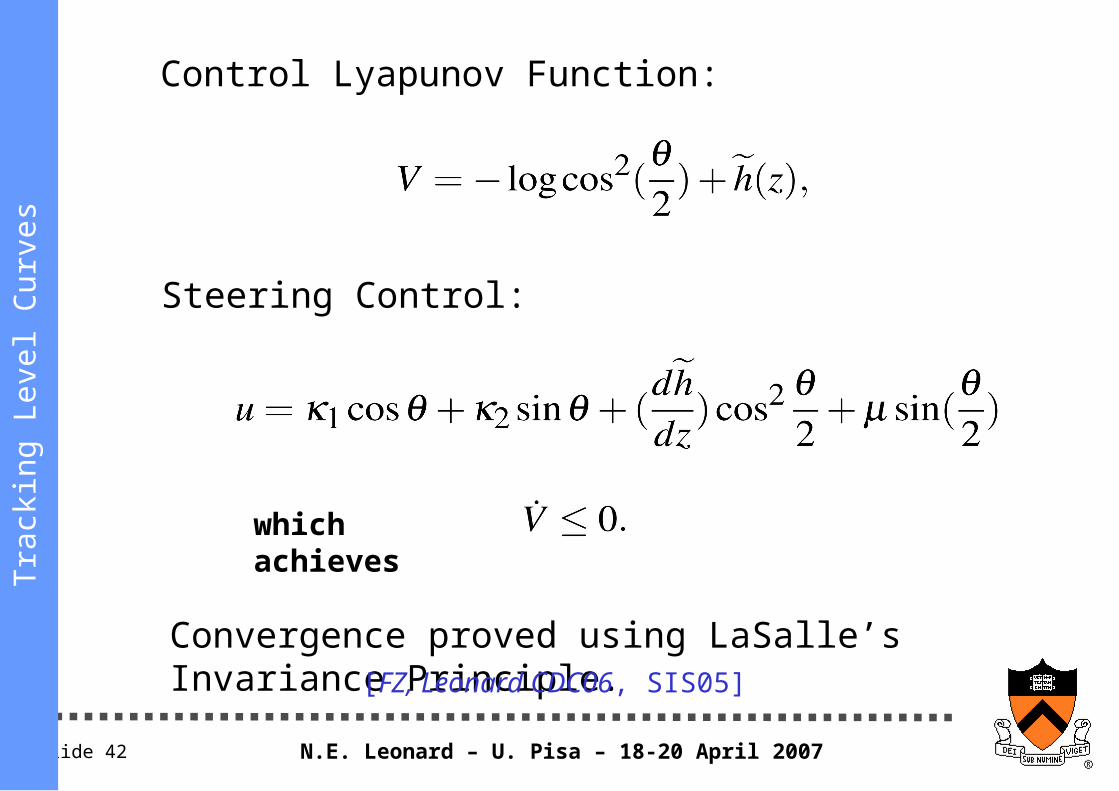
Convergence proved using LaSalle’s Invariance Principle.
Trac
king
Lev
el C
urve
s
Control Lyapunov Function:
Steering Control:
which achieves
[FZ, Leonard CDC06, SIS05]
Related Documents











