CONTROLE DA CRAVAÇÃO DE ESTACAS PRÉ-MOLDADAS: AVALIAÇÃO DE DIAGRAMAS DE CRAVAÇÃO E FÓRMULAS DINÂMICAS Silvio Heleno de Abreu Vieira DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM CIÊNCIAS EM ENGENHARIA CIVIL. Aprovada por: Prof. Francisco de Rezende Lopes, Ph.D. Prof. Paulo Eduardo Lima de Santa Maria, Ph.D. Prof. Fernando Artur Brasil Danziger, D.Sc. Profª. Bernadete Ragoni Danziger, D.Sc. RIO DE JANEIRO, RJ – BRASIL FEVEREIRO DE 2006

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

CONTROLE DA CRAVAÇÃO DE ESTACAS PRÉ-MOLDADAS: AVALIAÇÃO
DE DIAGRAMAS DE CRAVAÇÃO E FÓRMULAS DINÂMICAS
Silvio Heleno de Abreu Vieira
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO
DOS PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE
EM CIÊNCIAS EM ENGENHARIA CIVIL.
Aprovada por:
Prof. Francisco de Rezende Lopes, Ph.D.
Prof. Paulo Eduardo Lima de Santa Maria, Ph.D.
Prof. Fernando Artur Brasil Danziger, D.Sc.
Profª. Bernadete Ragoni Danziger, D.Sc.
RIO DE JANEIRO, RJ – BRASIL
FEVEREIRO DE 2006

ii
VIEIRA, SILVIO HELENO DE ABREU
Controle da Cravação de Estacas Pré-
moldadas: Avaliação de Diagramas de
Cravação e Fórmulas Dinâmicas [Rio de
Janeiro] 2006.
X, 122 p. 29,7 cm (COPPE/UFRJ,
M. Sc., Engenharia Civil, 2005).
Dissertação – Universidade Federal do
Rio de Janeiro, COPPE.
1. Fundações
2. Estacas pré-moldadas
3. Controle de cravação
I. COPPE/UFRJ II. Título (série)

iii
Dedico este trabalho à
minha família, aos meus amigos e
em especial à minha namorada.

iv
AGRADECIMENTOS
Ao professor Francisco de Rezende Lopes, por estar sempre presente ao longo de toda
esta trajetória. Pela sua compreensão, pela amizade, pela orientação neste trabalho e,
principalmente pelos ensinamentos passados.
Aos meus pais, Antônio e Maria, pela educação que me deram, que certamente
contribuiu em muito para que eu chegasse até aqui.
Aos docentes da COPPE pelos ensinamentos recebidos, em especial ao Professor
Dirceu Velloso pelas aulas e experiência de vida passadas.
À CAPES pelo apoio financeiro.
Aos meus amigos e familiares cujo apoio foi fundamental para que eu pudesse chegar
até aqui.
A todos meus amigos da minha turma de mestrado.
À minha namorada, Cláudia Leite, pelo carinho, pela amizade, pelo exemplo de
dedicação e perseverança. Agradeço a você por todos os momentos de felicidade que
me proporcionou e que ainda vem proporcionando. Agradeço também a Deus, por ter
te colocado em minha vida.
Finalizando, eu gostaria de agradecer a todos aqueles que direta ou indiretamente
contribuíram para que esse trabalho fosse possível.

v
Resumo da Dissertação apresentada a COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
CONTROLE DA CRAVAÇÃO DE ESTACAS PRÉ-MOLDADAS: AVALIAÇÃO
DE DIAGRAMAS DE CRAVAÇÃO E FÓRMULAS DINÂMICAS
Silvio Heleno de Abreu Vieira
Fevereiro/2006
Orientador: Francisco de Rezende Lopes
Programa: Engenharia Civil
Este trabalho apresenta um estudo dos elementos que podem ser tirados do
diagrama de cravação de uma estaca. Inicialmente é estabelecida uma correlação entre
o número de golpes no SPT e o número de golpes para uma dada penetração da estaca
(50 cm). A partir desta formulação se torna possível avaliar o perfil de resistência do
subsolo. Ainda, a capacidade de carga estática de uma estaca – via Fórmulas
Dinâmicas – pode ser obtida a partir do seu diagrama de cravação. Em seguida
apresenta-se uma avaliação da Fórmula dos Dinamarqueses a partir da comparação
com provas de carga dinâmicas. Examina-se o acerto desta fórmula face o
comprimento das estacas. Os dados utilizados provêm de três obras no Rio de Janeiro.
Finalmente, aborda-se a questão da avaliação da segurança de um estaqueamento em
que diferentes processos de controle são utilizados.

vi
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
CONTROL OF DRIVING OF PRECAST CONCRETE PILES: EVALUATION OF
DRIVING DIAGRAMS AND DRIVING FORMULAE
Silvio Heleno de Abreu Vieira
February/2006
Advisor: Francisco de Rezende Lopes
Department: Civil Engineering
This work presents a study of the elements that can be derived from the
driving diagram. Initially a correlation is established between the number of blows in
the SPT and the number of blows for a given penetration of the pile (50 cm). This
formulation allows the evaluation of the profile of soil strength. Furthermore, the
static load capacity of a pile can be obtained from this driving diagram through
Driving Formulae. An evaluation of the Danish Formula based on a comparison with
dynamic load tests is presented. The predictive capacity of this formula is examined
as a function of pile length. The data used come from three works in Rio de Janeiro.
Finally, the evaluation of the safety of a piling job, where different processes of
control are used, is discussed.

vii
ÍNDICE ANALÍTICO
CAPÍTULO 1 INTRODUÇÃO……………………………………………………. 1
CAPÍTULO 2 REVISÃO BIBLIOGRÁFICA.......................................................... 4
2.1 Introdução............................................................................................................ 4
2.2 Fórmulas Dinâmicas............................................................................................ 6
2.2.1 Medidas de Nega e Repique.................................................................... 7
2.2.2 Fórmulas Dinâmicas: a Conservação da Energia..................................... 7
2.2.3 Fórmulas Dinâmicas Incorporando a Lei do Choque de Newton............ 10
2.3 Utilização do Repique.......................................................................................... 13
2.4 Equação da Onda................................................................................................. 15
2.4.1 A Equação da Onda de Tensões em Barras............................................. 15
2.4.2 Aplicação à Cravação de Estacas ............................................................ 24
2.5 Monitoração Eletrônica e Provas de Carga Dinâmicas........................................ 28
2.5.1 Introdução................................................................................................ 28
2.5.2 Método Case............................................................................................ 30
2.5.3 Método CAPWAP................................................................................... 35
2.6 Provas de Carga Estáticas.................................................................................... 37
viii
2.7 Recomendações Gerais da Norma Brasileira ...................................................... 43
2.8 Recomendações Gerais do Eurocódigo 7............................................................ 45
CAPÍTULO 3 DIAGRAMA DE CRAVAÇÃO COMO MÉTODO DE
VERIFICAÇÃO DO PERFIL DE RESISTÊNCIA DO TERRENO........................... 47
3.1 Introdução............................................................................................................ 47
3.2 O Diagrama de Cravação e a Prática Brasileira e Internacional.......................... 48
3.3 Diagrama de Cravação com Diferentes Intervalos de Medição e Efeito de
Grupo............................................................................................................................ 49
3.4 Comparação entre o Ensaio SPT e a Cravação de uma Estaca Pré-moldada...... 54
3.4.1 Introdução................................................................................................ 54
3.4.2 Correções da Cravação da Estaca com o SPT no Sentido de uma
Padronização........................................................................................................57
3.4.2.1 Introdução............................................................................................. 57
3.4.2.2 Correlação com Correção da Energia de Cravação e Geometria das
Estacas................................................................................................................. 58
3.4.2.3 Correlação Incorporandoa Impedância das Estacas.............................. 61
3.4.2.4 Correlação Incorporando a Eficiência do Sistema de Cravação........... 63
3.4.2.5 Correlação com Todos os Fatores de Correção.................................... 64
3.4.3 Correlações Considerando o Atrito Lateral da Estaca............................. 65
3.5 O Diagrama de Cravação como Verificador do Perfil do Subsolo...................... 69
ix
CAPÍTULO 4 UMA AVALIAÇÃO DA CONFIABILIDADE DE FÓRMULAS
DINÂMICAS................................................................................................................ 75
4.1 Uma Revisão de Avaliações Anteriores.............................................................. 75
4.2 Comparação da Fórmula dos Dinamarqueses com Provas de Carga Dinâmicas.78
4.3 Análise Comparativa dos Métodos Dinâmicos x Estáticos................................. 90
CAPÍTULO 5 INTERPRETAÇÃO DE RESULTADOS DE PROVAS DE CARGA
COM VISTAS A AVALIAR A SEGURANÇA DE FUNDAÇÕES........................... 93
5.1 Introdução............................................................................................................ 93
5.2 Filosofia dos Coeficientes de Segurança em Fundações..................................... 96
5.21 Introdução................................................................................................ 96
5.2.2 Coeficiente de Segurança Global............................................................. 98
5.2.3 Coeficientes de Segurança Parciais......................................................... 100
5.3 Probabilidade de Ruptura..................................................................................... 104
5.4 Método do Índice de Confiabilidade....................................................................105
5.5 Aplicação aos Casos de Obra............................................................................... 108
CAPÍTULO 6 CONCLUSÕES E SUGESTÕES......................................................113
6.1 Considerações Finais........................................................................................... 113
6.2 Conclusões........................................................................................................... 114
6.3 Sugestões para Teses Futuras...............................................................................115

x
REVISÃO BIBLIOGRÁFICA..................................................................................... 116
1
CAPÍTULO 1
INTRODUÇÃO
Segundo SANTOS (2000), a arte de cravar estacas para servir como elemento de
suporte para determinadas edificações é uma prática antiga, como comprovam as
palafitas de madeira em regiões lacustres que datam da idade pré-histórica. O
processo construtivo bem como os materiais utilizados na construção tem sido objeto
de sucessivos melhoramentos ao longo do tempo, sempre com o objetivo de garantir a
qualidade e uma menor relação custo-benefício.
As fundações, como qualquer outra parte de uma estrutura, devem ser projetadas e
executadas de forma a garantir, sob a ação das cargas em serviço, as condições
mínimas de segurança, funcionalidade e durabilidade. Uma estrutura é considerada
segura quando puder suportar as ações que vierem a solicitá-la durante a sua vida útil
sem ser impedida, quer temporária, quer permanentemente, de desempenhar as
funções para as quais foi concebida (ALONSO, 1998).
VELLOSO (1990) diz que a qualidade de uma fundação nada mais é do que sua
adequação ao uso para o qual foi concebida, ou seja, a partir de um controle de
qualidade de uma obra de fundações, assim como qualquer outra de outra natureza, se
pode avaliar e, conseqüentemente, aprovar, aceitar ou recusar a mesma. Afirma,
ainda, que a qualidade tem uma função pedagógica, que deve se aplicar a toda
empresa, desde a sua direção até o mais subalterno servidor, sendo a ignorância o
maior inimigo da qualidade e a burocracia o maior inimigo da garantia da qualidade,
além do que só se pode controlar aquilo que se pode verificar e só se pode exigir o
que se pode controlar.
VELLOSO (1990) cita, ainda, que do ponto de vista de sua aplicabilidade, a garantia
da qualidade requer um certo número de precondições:
a) A qualidade a ser obtida deve ser claramente definida;

2
b) Os procedimentos de garantia da qualidade devem ser definidos claramente e
integrados no organograma para planejamento, projeto e execução;
c) Os procedimentos da garantia da qualidade devem ser executados e os
resultados devem ser documentados;
d) Se o controle continuado provar que a qualidade não é obtida, o programa
deve ser redirecionado no sentido de identificar os pontos de deficiência e
eliminá-los, através de nova metodologia de trabalho, treinamento,
substituição de profissionais inadequados às funções que exercem.
VELLOSO (1990) enfatiza que, especificamente em fundações, o cumprimento dos
formalismos da garantia da qualidade não significa necessariamente que o bom
desempenho esteja assegurado, pois um aspecto que diferencia um projeto de
estrutura de um projeto de fundações é que, no primeiro caso, as características dos
materiais de construção são definidas pelo projetista, enquanto no segundo se trabalha
com o solo, que é um material não fabricado pelo homen.
Em um projeto de cravação de estacas uma questão de suma importância é o correto
planejamento de suas etapas, incluindo desde as fases preliminares de caracterização
do subsolo, até a definição de critérios de cravação que deverão ser atendidos durante
a fase de produção, passando pela escolha e utilização das diversas técnicas de
controle disponíveis. Uma falta de planejamento pode dificultar o emprego de
processos de execução, onerando técnica e financeiramente a obra.
No meio técnico pode-se dizer que o grande desafio é a busca de resultados com o
mínimo possível de investimentos. Diante disso pode-se afirmar sem dúvida alguma
que os métodos dinâmicos constituem uma poderosa ferramenta para controle in situ
de obras de fundações, principalmente quando não se dispõe de um número suficiente
de provas de carga estáticas devido ao seu custo elevado.
O presente trabalho busca analisar e comparar os diversos métodos de controle de
estaqueamentos, colocando frente a frente dados de algumas obras, possibilitando
verificar a eficácia e a confiabilidade destes métodos, tendo sempre em mente que o

3
objetivo é a verificação da capacidade de carga das estacas já cravadas, como
instrumento de controle e não como instrumento de projeto.
No capítulo 2 do presente trabalho faz-se uma revisão dos métodos de controle mais
utilizados na prática de fundações. No capítulo 3 faz-se a devida valorização do
diagrama de cravação como elemento de controle de cravação e também como de
verificação do perfil do subsolo, buscando estabelecer uma correlação entre o número
de golpes na estaca e o ensaio SPT. No capítulo 4 faz-se uma avaliação da
confiabilidade das fórmulas dinâmicas frente a dados de 3 obras, e também, uma
análise comparativa dos métodos dinâmicos. A seguir, no capítulo 5, é feito um
exercício de avaliação e interpretação dos fatores de segurança globais e parciais,
ressaltando o critério de escolha do coeficiente de segurança para a determinação da
carga admissível, tendo em vista a probabilidade de ruína associada. Por fim, o
capítulo 6 apresenta conclusões e recomendações para pesquisas futuras.

4
CAPÍTULO 2
REVISÃO DE MÉTODOS DE CONTROLE DE
ESTAQUEAMENTOS
2.1 INTRODUÇÃO
Os diversos métodos utilizados no controle de estaqueamentos têm como grande
objetivo garantir a integridade e a capacidade de carga estática das estacas.
Usualmente, o controle é feito pela nega, durante a cravação, e por provas de carga
estáticas realizadas em uma amostra do estaqueamento. Os sistemas de monitoração
eletrônica da cravação de estacas surgiram na década de 70 do século XX, e se
tornaram uma ferramenta importante e muito utilizada no controle e aferição de
fundações (ALONSO, 1998).
Segundo AOKI e CINTRA (2000), a capacidade de carga de uma estaca de uma
fundação corresponde à carga que provoca a ruptura do elo mais fraco do sistema
solo-estaca, geralmente o maciço de solo.
O método mais confiável de se avaliar a capacidade de carga de uma estaca é através
da realização de provas de carga estáticas, entretanto, devido ao seu alto custo é um
método pouco utilizado ou aplicado a uma amostra pequena, abrindo espaço para
métodos menos onerosos como os métodos dinâmicos.
BELL et al. (2002) propõem um interessante processo para definição dos critérios de
cravação a serem utilizados em uma obra. Tal processo procura interligar as diversas
técnicas de previsão e controle de estacas cravadas de uma maneira lógica, otimizando
tempo e custo.
5
O método abaixo, descrito por ALVES e LOPES (2004), foi adaptado da proposta
original de BELL et al. (2002), visando adequá-la à realidade brasileira. O roteiro
proposto pode ser resumido nos seguintes passos:
1. Avaliação dos resultados da investigação do subsolo (sondagens) e previsão da
capacidade de carga estática das estacas, através de método consagrado. Daí
resultam previsões de profundidades a serem atingidas para os diversos tipos de
estacas nas diferentes regiões do Brasil.
2. Seleção de critérios preliminares de cravação, tais como negas, energia do
martelo, etc., através de uma simulação pela Equação da Onda. Pra este fim,
podem ser utilizados programas computacionais como o GRLWEP (Goble
Rausche Likins and Associates, Inc., EUA), TNOWAVE (Institute TNO for
Building Materials and Building Structures, Holanda) e MICROWAVE (TTI –
Texas Transportation Institute, EUA).
3. Escolha da área inicial de cravação, dando prioridade a uma região com
investigação bastante completa e que seja representativa da obra.
4. Cravação de estaca-piloto – com registro de diagramas de cravação e realização de
ensaios de carregamento dinâmico – para avaliação da capacidade de carga
mobilizada, tensões de cravação e desempenho do martelo de cravação, incluindo
recravações de algumas estacas para mensuração do efeito tempo (“recuperação”
ou “set-up”).
5. Avaliação e ajuste de critérios preliminares de cravação (definidos no passo 2), em
função dos resultados dos ensaios de carregamento dinâmico nas estacas-piloto.
Os diagramas de cravação devem ser comparados com os perfis de sondagem à
percussão.
6. Cravação de estaca(s) de prova utilizando os novos critérios de cravação.
7. Realização de prova de carga estática na(s) estacas(s) de prova.
6
8. Avaliação final dos critérios de cravação a serem utilizados nas estacas daquela
região da obra, baseada nos resultados da(s) prova(s) de carga estática(s).
9. Estender o processo (passos 4 a 8) da primeira região a outras regiões de
características distintas, os critérios de controle definidos são então adotados em
toda obra.
10. Interpretação do conjunto de provas de carga para a verificação e, posteriormente,
aprovar ou recusar o estaqueamento.
No item 4 do procedimento acima está prevista a obtenção do diagrama de cravação,
que será detalhado no próximo capítulo.
2.2 FÓRMULAS DINÂMICAS
AOKI (1986) diz que o controle de cravação é feito tradicionalmente pela nega, ou
seja, o deslocamento plástico do solo medido no topo da estaca. Segundo VELLOSO
e LOPES (2002) a resposta à cravação da estaca pode ser feita de diferentes maneiras.
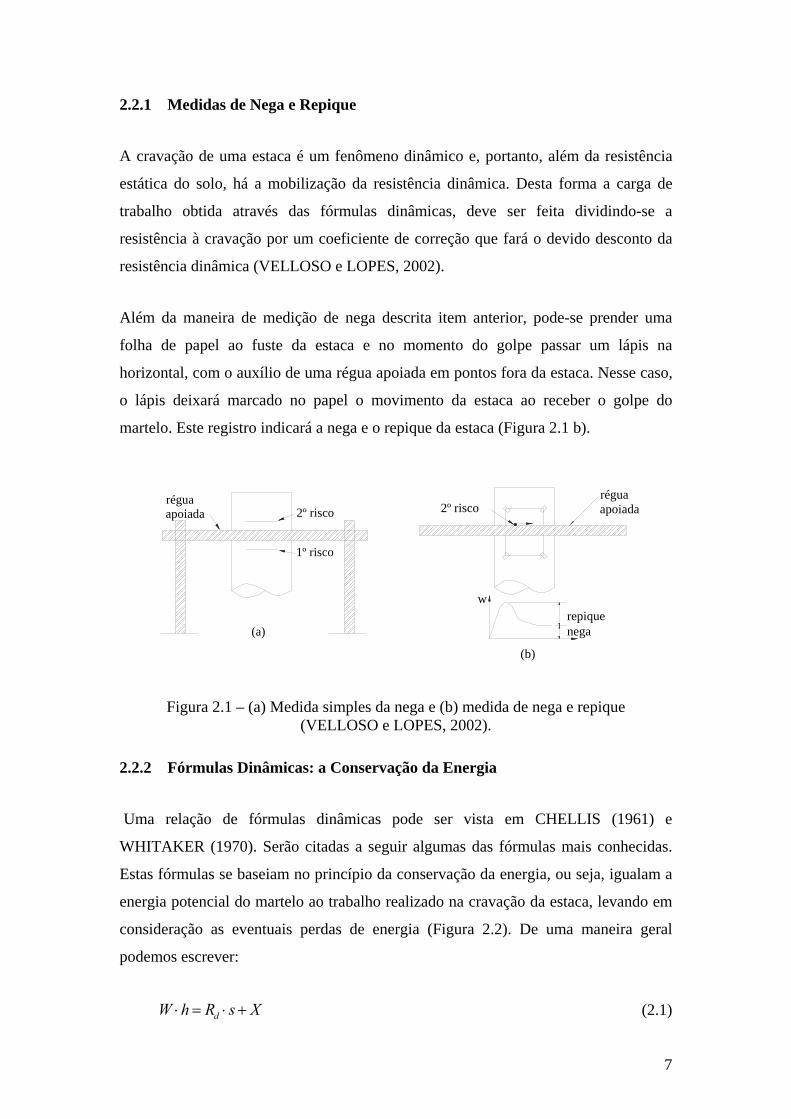
A forma mais simples consiste em riscar uma linha horizontal na estaca com uma
régua apoiada em 2 pontos da torre do bate-estaca, aplicar 10 golpes, riscar
novamente, medir a distância entre os dois riscos e dividir esta distância por 10,
obtendo-se a penetração média por golpe, chamada nega (Figura 2.1a).
As fórmulas dinâmicas buscam justamente correlacionar a energia de queda do
martelo com a resistência à cravação da estaca, através da nega. Estas fórmulas,
basicamente enfocam a conservação de energia e, algumas delas, incorporam as leis
de choque de Newton. A maioria destas fórmulas foi deduzida com base na lei de
Newton referente ao impacto entre dois corpos rígidos, e igualam a energia de queda
do martelo com a nega multiplicada pela resistência dinâmica à cravação.
Inicialmente estas fórmulas não levavam em consideração as perdas de energia
durante o choque; posteriormente, estas perdas foram levadas em consideração e
introduzidas nestas fórmulas. Há de se notar logo adiante que tais perdas variam de
acordo com o modelo proposto por cada autor (VELLOSO e LOPES, 2002).
7
2.2.1 Medidas de Nega e Repique
A cravação de uma estaca é um fenômeno dinâmico e, portanto, além da resistência
estática do solo, há a mobilização da resistência dinâmica. Desta forma a carga de
trabalho obtida através das fórmulas dinâmicas, deve ser feita dividindo-se a
resistência à cravação por um coeficiente de correção que fará o devido desconto da
resistência dinâmica (VELLOSO e LOPES, 2002).
Além da maneira de medição de nega descrita item anterior, pode-se prender uma
folha de papel ao fuste da estaca e no momento do golpe passar um lápis na
horizontal, com o auxílio de uma régua apoiada em pontos fora da estaca. Nesse caso,
o lápis deixará marcado no papel o movimento da estaca ao receber o golpe do
martelo. Este registro indicará a nega e o repique da estaca (Figura 2.1 b).
régua apoiada 2º risco
1º risco
(a)
régua apoiada2º risco
wrepiquenega
(b)
Figura 2.1 – (a) Medida simples da nega e (b) medida de nega e repique (VELLOSO e LOPES, 2002).
2.2.2 Fórmulas Dinâmicas: a Conservação da Energia
Uma relação de fórmulas dinâmicas pode ser vista em CHELLIS (1961) e
WHITAKER (1970). Serão citadas a seguir algumas das fórmulas mais conhecidas.
Estas fórmulas se baseiam no princípio da conservação da energia, ou seja, igualam a
energia potencial do martelo ao trabalho realizado na cravação da estaca, levando em
consideração as eventuais perdas de energia (Figura 2.2). De uma maneira geral
podemos escrever:
dW h R s X⋅ = ⋅ + (2.1)

8
onde W = peso do martelo h = altura de queda Rd = resistência à cravação s = penetração ou nega X = perdas de energia (energia não utilizada em fazer a estaca penetrar no
solo)
Segundo VELLOSO e LOPES (2002), as principais perdas de energia em martelos de
queda livre são:
• atrito do martelo nas guias
• atrito dos cabos na roldana
Existe, ainda, uma perda de energia associada às deformações elásticas da estaca, do
solo e do sistema de amortecimento (cepo e coxim).
Figura 2.2 – Fórmulas Dinâmicas de cravação (SANTOS, 2002)
Há uma terceira perda de energia, não computada nas fórmulas dinâmicas, pois
depende do operador do bate-estaca, que decorre da atuação precoce do guincho ao
final da queda do martelo.

9
a) Fórmula de Sanders
A fórmula de Sanders, proposta em 1851, iguala a energia de queda do martelo com o
deslocamento da estaca multiplicado pela resistência à cravação. A hipótese adotada
na fórmula de Sanders despreza qualquer perda de energia (Figura 2.3).
Para se obter a carga admissível de uma estaca através desta fórmula, a resistência à
cravação deve ser dividida por um fator de correção igual a 8, que fará o devido
desconto da resistência dinâmica (VELLOSO e LOPES, 2002).
sRhW d ⋅=⋅ (2.2)
Figura 2.3 – Hipótese adotada na fórmula de Sanders (ARAÚJO, 1988)
Sendo que w é o deslocamento da estaca.
b) Fórmula de Wellington ou da Engineering News Record
A fórmula da Engineering News Record, proposta por A.M. Wellington em 1888, se
baseia na premissa de que, sob a ação do martelo, a estaca se encurta elasticamente e
depois penetra no solo encontrando uma dada resistência Rd, seguindo o diagrama
esquematizado na Figura 2.4. Para esta fórmula deve ser usado um fator de correção
igual a 6.
⎟⎠⎞
⎜⎝⎛ +⋅=⋅
2csRhW d (2.2)
Foram sugeridos valores empíricos pra o encurtamento elástico c da estaca:
R
Rd
s 0 w

10
54,22 =c cm para martelos de queda livre 254,02 =c cm para martelos de ação simples, dupla e diferenciais a vapor
Figura 2.4 – Hipótese adotada na fórmula do Engineering News Record
(VELLOSO e LOPES, 2002)
2.2.3 Fórmulas Dinâmicas Incorporando a Lei do Choque de Newton
a) Fórmula dos Holandeses
A fórmula dos Holandeses, proposta em 1812, utiliza a relação entre o peso P da
estaca e o peso W do martelo de cravação, para considerar as perdas de energia no
impacto entre os dois corpos:
sRPWhW
d ⋅=+⋅2
(2.3)
Para esta fórmula recomenda-se um fator de correção igual a 10 para martelos de
queda livre e igual a 6 para martelos a vapor.
b) Fórmula de Hiley
A Fórmula de Hiley, proposta em 1925, supõe que haja as seguintes perdas de
energia:
1. a eficiência do martelo, ( fe );
R
w 0
Rd
A B
C D
s c
11
2. as perdas no impacto, ( ( )⎥⎦
⎤⎢⎣
⎡+−⋅
⋅⋅⋅PWePhWef
21 , onde ef é coeficiente de restituição do
choque);
3. perdas por compressão elástica do capacete (2
1cRd ⋅);
4. perdas por compressão elástica da estaca (22
2cRAELRR ddd ⋅
=⋅⋅
⋅ );
5. perdas por compressão elástica do solo (2
3cRd ⋅);
Então pode-se escrever:
( )222
1 3212 cRcRcR
PWePhWehWesR ddd
ffd⋅
−⋅
−⋅
−⎥⎦
⎤⎢⎣
⎡+−⋅
⋅⋅−⋅⋅=⋅ ⋅ (2.4a)
Combinando os termos, obtém-se a fórmula de Hiley. Para esta fórmula considera-se
um fator de correção entre 2 e 6.
( ) PWPeW
cccs
hWeR f
d +⋅+
⋅++⋅+
⋅⋅=
2
32121 (2.4b)
Valores recomendados de c1, c2, c3 e e podem ser encontrados em CHELLIS (1961) e
ARAÚJO (1988).
O fabricante de martelos diesel Kobe propõe uma adaptação da fórmula de Hiley, que
toma a forma (VELLOSO e LOPES, 2002):
PWW
cshWRd +
⋅+
⋅⋅=
2 (2.5)

12
Para esta fórmula o fabricante recomenda um fator de correção igual a 4 para cargas
permanentes e igual a 2 para cargas temporárias.
c) Fórmula de Janbu
A fórmula de Janbu, proposta em 1953, adota constantes empíricas e a relação entre
pesos da estaca e do martelo, bem como perdas de energia por compressão elástica de
estaca. Para esta fórmula recomenda-se um fator de segurança igual a 2.
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
⋅+++⋅⎟
⎠⎞
⎜⎝⎛ ⋅+⋅=⋅ ⋅
WPW
PsRhW d
15,075,01115,075,0 λ
(2.6)
sendo
2sAELhW
p ⋅⋅⋅⋅
=λ
onde A = área da seção transversal da estaca Ep = módulo de Young do material da estaca L = comprimento da estaca
d) Fórmula dos Dinamarqueses
A fórmula dos Dinamarqueses, desenvolvida por SORENSEN e HANSEN (1957),
considera a eficiência do martelo, η, e a perda de energia na compressão elástica da
estaca. Recomenda-se um fator de correção igual a 2.
A fórmula se baseia em
XsRhW d +⋅=⋅⋅η (2.7)
sendo

13
p
d
EALhWR
X⋅
⋅⋅⋅⋅=
η22
(2.8)
onde η = eficiência do sistema de cravação
Combinando as 2 equações tem-se:
p
d
EALhWs
LWR
⋅⋅⋅⋅⋅
+
⋅⋅=
ηη2
21
(2.9)
Como eficiência, são recomendados η = 0,7 para martelos de queda livre e η = 0,9
para martelos diesel, e fator de correção igual a 2. Sugerem, ainda, como orientação
para cravação:
Estaca (η.h)max (W/P)min Pré-moldada de concreto 1m 0,50 Aço 2m 1,50 Madeira 3m 0,75
2.3 UTILIZAÇÃO DO REPIQUE
Uma alternativa simples ao controle pela nega é a medição, durante a cravação, do
repique, conforme pode ser visto na Figura 2.1. A utilização do repique –
deslocamento elástico medido no topo da estaca (que corresponde a c2 + c3 ) – foi
sugerida por CHELLIS (1951). Embora não muito difundido tem-se tornado motivo
de interesse de alguns pesquisadores, notadamente no Japão onde, juntamente com a
nega, faz parte de normas de fundações, e também no Brasil, onde tem sido alvo de
estudos e aplicações práticas com bons resultados (AOKI, 1986; GOMES e LOPES,
1986).
O repique, descontado o encurtamento elástico do solo (c3), indica o quanto a estaca
está sendo solicitada axialmente, ou seja, a força que o solo está oferecendo como
reação à penetração da estaca. À medida que a estaca atinge uma profundidade
14
próxima daquela necessária para sua capacidade de carga, a nega diminui e o repique
aumenta.
Segundo CHELLIS (1951), a resistência à cravação é proporcional ao encurtamento
elástico, ou seja:
LEA
cR pd
⋅⋅≅ 2 (2.10)
AOKI (1986) propôs que encurtamento elástico do fuste da estaca poderia ser
estimado da seguinte forma:
( )ultlultpp
QQEA
Lc ,,2 ⋅+⋅
= α (2.11)
O coeficiente α expressa a relação entre as resistências da ponta e lateral local do
ensaio de penetração estática, segundo VARGAS (1977).
AOKI (1986) sugeriu ainda que, o cálculo de c2 deveria fazer parte do cálculo da
capacidade de carga pelo método estático, em que as duas parcelas da capacidade de
carga (fuste e ponta) são conhecidas, bem como a distribuição do atrito lateral, que
determina o valor de α (para o caso de estaca relativamente curtas).
Os valores de c3 a serem somados se situam tipicamente numa faixa de 2,5 mm para
areias até 7,5 mm para argilas.
UTO et al. (1985) propuseram uma equação simples para a determinação da
capacidade de carga da estaca. Resolvendo a equação da onda, tendo como condições
de contorno o valor constante da resistência na ponta da estaca, o repique medido no
topo da estaca ao ser cravada, além de desconsiderar o atrito lateral dinâmico,
chegaram à primeira parcela da seguinte equação:
( )21
23
22
fLUN
LfccsEA
R pd
⋅⋅+
⋅⋅
⋅++⋅= (2.12)
15
onde N = média dos valores de SPT ao longo do fuste U = perímetro da estaca f1 = fator adimensional para a resistência da ponta f2 = fator de correção para o atrito lateral, adotado igual a 2,5
sendo que o fator adimensional f1 pode ser determinado pela seguinte equação:
31 5,1 ⎟⎠⎞
⎜⎝⎛ ⋅=
PWf (2.13)
A primeira parcela corresponde à resistência de ponta estática e dinâmica, a segunda
parcela de natureza empírica corresponde à resistência estática lateral. Considerando
que o valor da nega (s) seja aproximadamente igual ao valor do encurtamento elástico
(c3) do solo, tem-se:
21 fLUN
LfcEA
R pd
⋅⋅+
⋅
⋅⋅= (2.14)
onde c = c2 + c3 (repique)
Para a utilização desta fórmula recomenda-se um fator de correção igual a 4 para
cargas permanentes e 2 para cargas temporárias.
2.4 EQUAÇÃO DA ONDA APLICADA À CRAVAÇÃO DE ESTACAS
2.4.1 A Equação da Onda de Tensões em Barras
A Equação da Onda foi desenvolvida por Saint-Vénant por volta de 1866 para o
estudo do impacto sobre a extremidade de uma barra. Sua aplicação na cravação de
estacas constitui-se em grande avanço qualitativo em relação ao uso de fórmulas
dinâmicas, pois, fisicamente a cravação de uma estaca está muito mais relacionada ao
fenômeno da transmissão de ondas de tensão através da estaca do que ao impacto puro
e simples entre dois corpos.
Ao sofrer um estímulo de uma força externa F, um elemento dx da estaca, de área A e
massa específica ρ, está sujeito à condição do equilíbrio da Figura 2.5.

16
Figura 2.5 – Equilíbrio do elemento de comprimento dx
Pela 2ª Lei de Newton, tem-se:
amdxx
Fx ⋅=∂
∂
e sendo
2
2
tua
∂∂
= ; dxAm ⋅⋅= ρ
obtém-se
dxtuAdx
xFx
2
2
∂∂
⋅⋅=∂
∂ρ (2.15)
Sabe-se que
AEF
xu
P
xx ⋅
=∂∂
=ε ∴ xuAEF Px ∂
∂⋅⋅=
que combinado com a equação anterior fornece
2
2
2
2
tuA
xuAEp ∂
∂⋅⋅=
∂∂
⋅⋅ ρ (2.16)
dxx
FF xx ∂
∂+ xF
dxx
Fx
∂∂
A

17
ou ainda
2
2
2
22
tu
xuc
∂∂
=∂∂
⋅ (2.17)
onde ρEc = é a velocidade de propagação da onda de tensão pela estaca (E é o
módulo de elasticidade e ρ a massa específica do material da barra).
Esta é a equação da onda unidimensional, em um meio isotrópico e homogêneo. A
solução geral desta equação diferencial linear parcial de segunda ordem a coeficientes
constantes é admitida como:
)()(),( ctxgctxftxu ++−= (2.18)
Esta solução representa duas ondas de deslocamento propagando-se em sentidos
opostos, ao longo do eixo da estaca com velocidade c, onde são válidos os efeitos de
superposição. A partir desta solução, obtêm-se também as funções força (F) e
velocidade (v) da partícula, as quais mantêm uma relação de proporcionalidade,
através de uma constante denominada de Impedância (Z), da seguinte forma:
F Z v= ⋅ (2.19)
Da Equação 2.18 (solução da Equação da Onda), diferenciando em relação ao tempo,
obtém-se a função velocidade:
)(')(' ctxgcctxfctuv +⋅+−⋅−=
∂∂
= (2.20)
De maneira simplificada temos:
↑+↓=∂∂
= vvtuv (2.21)
Agora, diferenciando a mesma Equação 2.18 em relação à coordenada espacial x
temos:

18
)(')(' ctxgctxfxu
++−=∂∂
(2.22)
Pela Lei de Hooke temos que xKF ⋅−= , onde K é a rigidez da mola e x é a
deformação (deslocamento). Para o caso de uma estaca com rigidez EpA e uma
deformação infinitesimal xu
∂∂ temos que:
xuAEF p ∂
∂⋅−=
então
[ ] [ ])(')(' ctxgAEctxfAEF pp +⋅−−⋅−= (2.23)
Esta função pode ser escrita de maneira simplificada como:
F F F= ↓ + ↑ (2.24)
Agora, multiplicando e dividindo ao mesmo tempo a Equação 2.23 pela velocidade de
propagação da onda de tensão na estaca (c) tem-se:
( )[ ] ( )[ ]ctxgc
AEcctxf
cAE
cF pp +⋅
⋅−−⋅
⋅−= '' ∴ ↑⋅−↓⋅= vZvZF (2.25)
onde Z é a impedância da estaca (c
AEZ p ⋅
= )
assim, tem-se que
( )↑−↓↑=+↓= vvZFFF (2.26)
( )↑−↓↑=+↓= FFZ
vvv 1 (2.27)

19
NIYAMA (1983) lembra, por ocasião da instrumentação no topo da estaca só são
obtidos valores totais, tanto de força quanto de velocidade. No entanto, as ondas
ascendentes é que conduzem informações dos efeitos externos e internos, se houver,
que provocam justamente estas reflexões (condições de contorno do problema). Para o
conhecimento das amplitudes das ondas descendentes e ascendentes, tem-se os
seguintes arranjos de expressões:
↑+↓= FFF ∴ ↓−↑= FFF
( )↑−↓= FFZ
v 1 ∴ ( )FF
Zv −↓⋅= 21
FFZv −↓⋅=⋅ 2
logo
2vZFF ⋅+
↓= (2.28)
e
2vZFFFF ⋅+
↓=−↑= ∴ 2
vZFF ⋅−↑= (2.29)
Está implícita, nestas equações, a idéia básica da técnica de instrumentação durante a
cravação da estaca (VELLOSO e LOPES, 2002).
As ondas ascendentes, originadas da reflexão, podem ser vistas como sendo formadas
para possibilitar o cumprimento das condições de contorno, tais como: resistência de
ponta, atrito lateral e mesmo mudança na impedância da estaca (CLOUGH e
PENZIEN, 1975).
Nas figuras que se seguem, as forças indicadas à esquerda representam aquelas
existentes antes do contato com a descontinuidade (resistência do solo, variação de

20
área da estaca, etc.) e à direita aquelas após o contato (JANZ et al., 1976; BERINGEN
et al., 1980; NIYAMA, 1983).
Figura 2.6 – Estaca (a) com ponta livre, (b) com ponta fixa, (c) com resistência de
ponta e (d) com atrito lateral (BERINGEN et al., 1980; NIYAMA, 1983)
(a) Estaca com Ponta Livre
Neste caso, a resistência de ponta da estaca é nula, Rp = 0 (Figura 2.6a), ou seja:
0== FPp
0↑=+↓ FF
logo
↓−↑= FF
ZF
ZF
ZFvvv ↓⋅
=⎟⎟⎠
⎞⎜⎜⎝
⎛ ↑−+
↓↑=+↓=
2

21
e
↓⋅= vv 2
Conclui-se, desta forma, que a onda de compressão chegando na extremidade inferior
da estaca reflete-se como onda de tração e, para manter o equilíbrio, a extremidade da
estaca acelera-se de novo e a velocidade reflete-se com o mesmo sinal, duplicando a
amplitude da onda incidente (NIYAMA, 1983).
Convém ressaltar que a superposição ocorre apenas durante um intervalo de tempo
correspondente à duração do pulso.
(b) Estaca com Ponta Fixa
Neste, caso o deslocamento da ponta e, conseqüentemente, a velocidade são sempre
nulos (Figura 2.6b). Tem-se, portanto, que:
0↑=+↓= vvv
logo
↓−↑= vv
e
ZF
ZF ↓⋅
=⎟⎟⎠
⎞⎜⎜⎝
⎛ ↑−
2 ou ↓↑= FF
assim,
↓⋅↓=+↑= FFFF 2
Desta forma, a onda descendente, que é de compressão, chega à ponta refletindo-se
também como onda de compressão. A velocidade reflete-se com sinal oposto,
anulando-se nesta extremidade; a estaca “repica”.

22
Convém ressaltar que esta condição é satisfeita desde que o apoio da ponta apresente
um comportamento rígido plástico com uma resistência pelo menos igual a duas vezes
a força incidente (JANZ et al., 1976; NAKAO, 1981); de outra forma, a estaca mover-
se-á, violando a condição de fixação.
(c) Estaca com Resistência de Ponta Finita
Neste caso, tem-se (Figura 2.6c):
↓+↑= FFRp
logo
↓−↑= FPF p
)(11↓−−↑=−↑= FR
ZF
Zv p
e
( )Z
RFFR
ZF
Zvvv p
p
−↓⋅=↓−−↑=−↑=+↓=
2)(11
Desta forma, a velocidade na ponta pode ser calculada ou explicitada em função da
amplitude da força incidente, da resistência de ponta e da impedância da estaca
(BERINGEN et al., 1980; NIYAMA, 1983).
(d) Estaca com Atrito Lateral
Considerando-se o equilíbrio na seção pontilhada, tem-se (Figura 2.6d)
lRFFFF +↑+↓↑=+↓ 2211 (2.30)
sendo Rl a resistência por atrito lateral. E, ainda:

23
↑+↓↑=+↓ 2211 vvvv
⎟⎟⎠
⎞⎜⎜⎝
⎛ ↑−+
↓=⎟⎟
⎠
⎞⎜⎜⎝
⎛ ↑−+
↓
2
2
2
2
1
1
1
1
ZF
ZF
ZF
ZF
Mas, como 21 ZZ = , vem ↑−↓−↑=−↓ 2211 FFFF
Desta forma, ↑−↑↓=−↓ 2121 FFFF e da Equação 2.30 vem
12121 RFFFF +↑+↑−↓=−↓
Igualando-se as duas expressões acima, obtém-se
12121 RFFFF +↑+↑−↑=−↑
121 22 RFF +↑⋅↓=⋅ (2.31)
Logo
2121 RFF +↑↑= (2.32)
Da mesma forma,
2122 RFF −↓↓= (2.33)
Conclui-se que a amplitude da força descendente é reduzida pela metade do valor da
resistência de atrito lateral. Por outro lado, a amplitude da força é aumentada do
mesmo valor. Isto se aplica ao caso da estaca com velocidade positiva, ou seja, num
movimento para baixo. Caso contrário, o sinal da resistência R1 será invertido (JANZ
et al., 1976; BERINGEN et al., 1980; NIYAMA, 1983).
24
2.4.2 Aplicação à Cravação de Estacas
Segundo consta na maioria dos trabalhos já publicados, é atribuída a ISAACS (1931)
a primeira constatação de que a cravação de estacas envolve o fenômeno da
propagação de ondas de tensão. Porém, a utilização da equação da onda na análise da
cravação de estacas só ganhou impulso mundialmente a partir da publicação do
trabalho clássico de SMITH (1960), onde um algoritmo para solução numérica da
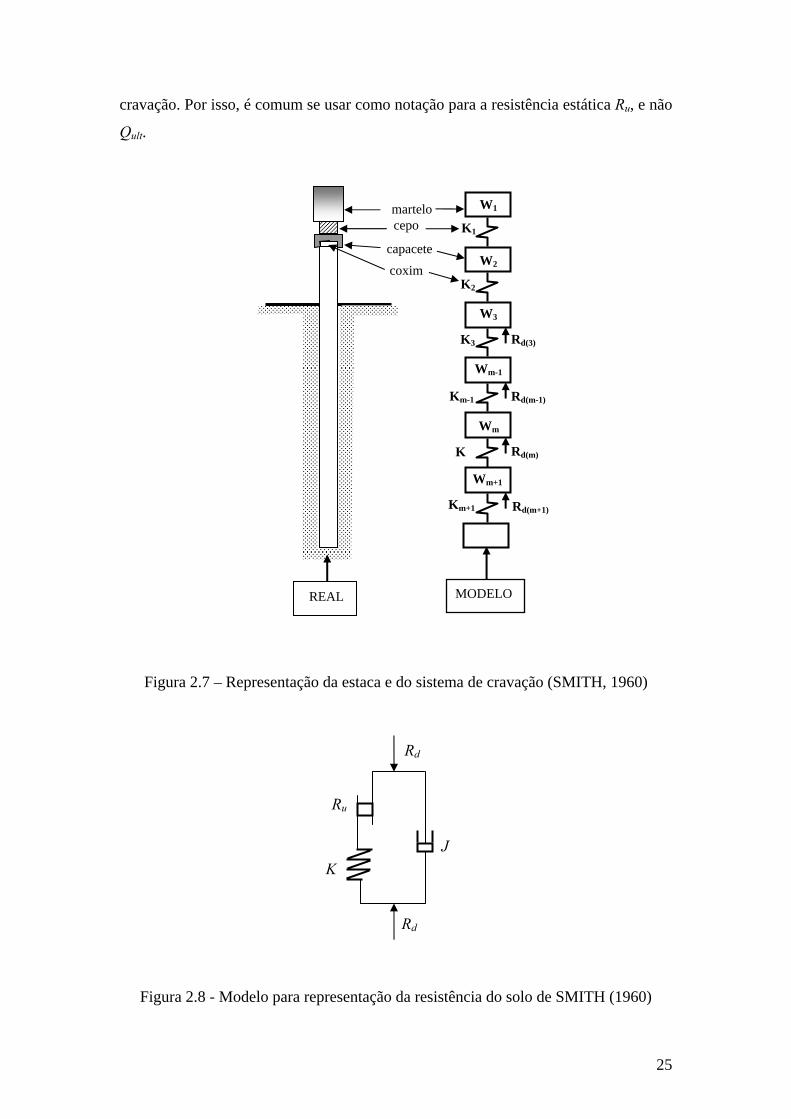
equação da onda por diferenças finitas é proposto. No modelo de SMITH (1960), o
martelo e o capacete, por serem objetos curtos, pesados e rígidos, são para efeito de
análise simulados por pesos individuais sem elasticidade. O cepo e o coxim são
representados por molas sem peso, podendo ter ou não um comportamento elástico. O
modelo encontra-se esquematizado na Figura 2.6.
A resistência oferecida pelo solo à penetração da estaca, tanto pela ponta como pelo
atrito lateral, possui uma componente estática e uma dinâmica. SMITH (1960) propôs
um modelo simples para a representação da resistência Rd no processo de cravação de
uma estaca, conforme a Figura 2.8. Nesse modelo, a resistência estática é dada pela
mola, proporcional, portanto, ao deslocamento, e a dinâmica é dada pelo amortecedor,
proporcional, portanto, à velocidade de deslocamento, ou seja:
dR K w J v= ⋅ + ⋅ (2.34)
onde K= constante da mola w = deslocamento em certa seção da estaca J = coeficiente de amortecimento do solo v = a velocidade em certa seção da estaca
Ou seja: wK ⋅ é a parcela estática da reação mobilizada e vJ ⋅ a parcela não estática.
A parcela estática da reação do solo RE é admitida como elasto-plástica, sendo que o
diagrama de cravação é admitido como na Figura 2.8, onde Q (quake) define o
deslocamento para o qual a resistência Ru é atingida. É importante frisar que a
resistência estática que a estaca apresenta durante a cravação pode não ser equivalente
à capacidade de carga estática Qult, por conta de alterações que ocorrem após a
25
cravação. Por isso, é comum se usar como notação para a resistência estática Ru, e não
Qult.
Figura 2.7 – Representação da estaca e do sistema de cravação (SMITH, 1960)
Figura 2.8 - Modelo para representação da resistência do solo de SMITH (1960)
J
Ru
K
Rd
Rd
W1
W2
W3
Wm-1
Wm
Wm+1
K1
K2
K3
Km-1
K
Km+1
Rd(3)
Rd(m-1)
Rd(m)
Rd(m+1)
MODELO REAL
cepo
capacete
martelo
coxim

26
De acordo com o diagrama da Figura 2.9 pode-se escrever:
QR
wRK uE == (2.35)
Figura 2.9 – Modelo de Smith: parcela estática da reação do solo (SMITH, 1960)
Segundo SMITH (1960), a parcela não estática da reação, RNE, de natureza viscosa, é
admitida como proporcional à velocidade do elemento da estaca e à resistência
estática, conforme mostra a Figura 2.10, onde JSmith é o coeficiente de amortecimento
proposto por SMITH (1960).
Figura 2.10 – Parcela dinâmica de reação (SMITH, 1960)
Pela Figura 2.10 tem-se
vRR
Jtg E
NE
Smith ==φ ∴ vJRR SmithENE ⋅⋅= (2.36)
como
RE
w0 s Q
Q
K 1
Ru
RNE /RE
v
JSmith 1
Ø

27
NEEd RRR += (2.37)
pode-se escrever
vJwKwKR Smithd ⋅⋅⋅+⋅= ou ( )vJ wKR Smithd ⋅+⋅= 1 (2.38)
Apesar de SMITH (1960) comentar em seu trabalho que a parcela dinâmica da reação
representar um amortecimento viscoso, na prática o parâmetro JSmith engloba diversos
fenômenos físicos, tais como viscosidade e inércia (ALVES et al., 2004).
A reação dinâmica do solo fica, então, representada da seguinte forma:
( )vJ wQR
R Smithu
d ⋅+⋅= 1 , para w < Q (2.39)
e
( )vJ wRR Smithud ⋅+⋅= 1 , para Qw ≥ (2.40)
SMITH (1960) considera, de sua experiência pessoal e de alguns resultados de provas
de carga, que o “quake” Q do solo é igual a 0,1” (2,5 mm), tanto para a ponta como
para atrito lateral, independentemente do tipo de solo e da geometria da estaca. Para o
parâmetro JSmith, SMITH (1960) propõe os valores de 0,15 s/ft (0,49 s/m) para a ponta
e 0,05 s/ft (0,16 s/m) para o atrito lateral.
A princípio, o método proposto por SMITH (1960) tinha como principal objetivo a
previsão das tensões de cravação nas estacas e acessórios de cravação. Com o passar
do tempo e o uso cada vez maior do método por parte dos engenheiros, sua aplicação
foi sendo ampliada, abrangendo também a previsão de negas e a elaboração de curvas
resistência x nega (gráficos de cravabilidade).
Hoje em dia dispõe-se de programas computacionais bastante elaborados, que aliam
simplicidade na operação com adaptabilidade às mais diversas condições de cravação
28
(representação de vários tipos de martelo, por exemplo). Alguns destes programas
foram citados no Item 2.1.
2.5 MONITORAÇÃO ELETRÔNICA E PROVAS DE CARGA DINÂMICAS
2.5.1 Introdução
Vários pesquisadores a partir de 1938 iniciaram medições dinâmicas utilizando-se das
várias ferramentas e técnicas disponíveis em cada época, até os dias atuais em
diversos países do mundo. Entretanto, o programa mais extenso e conhecido foi
desenvolvido no atual “Case Western Research University, Ohio, USA”, iniciado em
1964 (GOBLE et al., 1980). Deste programa resultou a técnica de instrumentação
mais utilizada em todo mundo na atualidade, sobre a qual está baseado o conceito de
prova de carga dinâmica, no sentido mais amplo (NIYAMA et al., 1988).
Esse novo controle de campo foi inicialmente motivado para o controle da cravação
de estacas para plataformas marítimas. Porém, como a magnitude das cargas
utilizadas neste tipo de estacas, seu diâmetro e comprimento são significativamente
maiores do que os normalmente usados em obras comuns de fundações, houve
necessidade de adaptar todo o conhecimento até então existente. E é justamente isso
que foi feito a partir de 1983 (ALONSO, 1988).
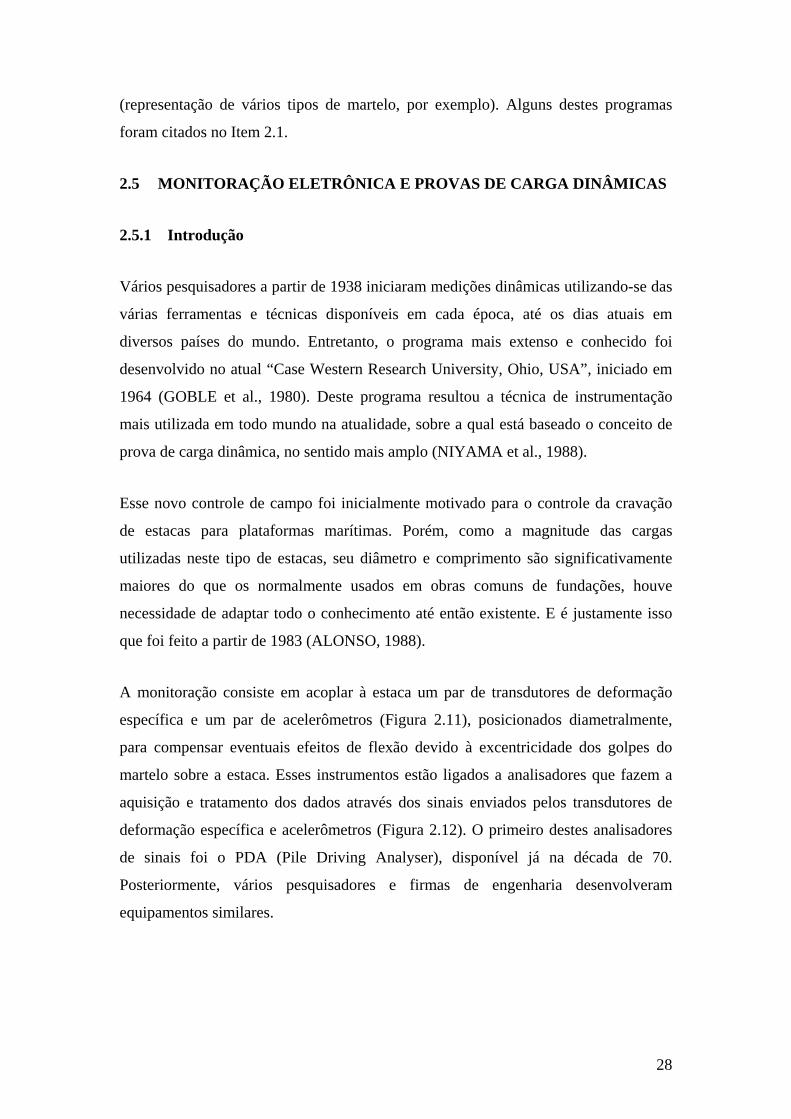
A monitoração consiste em acoplar à estaca um par de transdutores de deformação
específica e um par de acelerômetros (Figura 2.11), posicionados diametralmente,
para compensar eventuais efeitos de flexão devido à excentricidade dos golpes do
martelo sobre a estaca. Esses instrumentos estão ligados a analisadores que fazem a
aquisição e tratamento dos dados através dos sinais enviados pelos transdutores de
deformação específica e acelerômetros (Figura 2.12). O primeiro destes analisadores
de sinais foi o PDA (Pile Driving Analyser), disponível já na década de 70.
Posteriormente, vários pesquisadores e firmas de engenharia desenvolveram
equipamentos similares.

29
Atualmente estes sistemas evoluem muito rapidamente, acompanhando o progresso da
eletrônica e da informática aplicada, e permitem processamento em tempo real,
armazenamento e envio remoto de dados digitalizados (NIYAMA et al., 1988).
Figura 2.11 – Transdutor de deformação específica e acelerômetro
acoplados a uma estaca
Figura 2.12 – Analisador de sinal tipo PDA (Pile Driving Analyser)
O ensaio de carregamento dinâmico é normalizado pela ASTM (1989), através da
norma D 4945-9 “Standard Method of High-Strain Dynamic Testing of Piles”, que
detalha os equipamentos, as precisões requeridas e os procedimentos a serem
utilizados. No Brasil a NBR 13208 (1994) é responsável pela normalização deste
ensaio e em uma de suas notas diz que este ensaio visa verificar o comportamento de
integridade estrutural e da interação estaca-solo durante a aplicação de uma força de
impacto no topo da estaca.

30
2.5.2 Método CASE
De acordo com a NBR 13208 (1994), os sinais de carregamento dinâmico, no
momento do ensaio, são processados através do método tipo CASE. À medida que os
golpes do martelo são aplicados à estaca, o método fornece as seguintes informações
(NIYAMA et al., 1988).
• capacidade de carga na interface solo-estaca (parâmetro principal)
• força máxima do impacto do martelo
• energia máxima do golpe do martelo
• eficiência do sistema de cravação
• integridade estrutural e posição do dano
• valores máximos de tensão, velocidade e deslocamento
• a distribuição das tensões na estaca, tanto de compressão como de tração
Este método é bastante prático e direto. Nele a resistência à cravação da estaca é
função da força e velocidades máximas geradas no impacto do martelo e da onda
refletida ao retornar à cabeça da estaca. A estimativa da capacidade de carga é dada
em tempo real à medida que os golpes são aplicados. A instrumentação faz um
registro contínuo no tempo da força e da velocidade no nível da instrumentação
(próximo ao topo da estaca). Estes registros são usualmente apresentados juntos (a
velocidade multiplicada pela impedância), tomando-se como referência inicial da
escala de tempo o instante em que a onda descendente passa pelo nível da
instrumentação.
Se não houvesse resistência do solo as duas curvas ( F e vZ ⋅ ) se superporiam até
( )cLtt 212 += . No entanto, as resistências do solo ao longo do fuste (atrito lateral)
causam ondas de compressão deslocando-se para cima, que aumenta a força no topo
da estaca e diminuem a velocidade. A ocorrência da resistência do solo numa
profundidade z causa um aumento na amplitude da força ascendente, que será sentida
na instrumentação no tempo 2z/c, enquanto na força descendente será sentida uma
redução na amplitude de mesma intensidade. Nota-se, pela Figura 2.13 que as duas
curvas começam a se afastar a partir do instante t1 (momento onde a influência do solo

31
começa a se manifestar) e a distância entre elas, medida na vertical, será o somatório
dos atritos laterais.
A onda descendente, percorrendo uma distância dz, tem sua amplitude reduzida de
( )dzzRA⋅21 , enquanto a onda ascendente tem um incremento de mesmo valor, sendo
( )zRA o atrito lateral unitário atuando no segmento dz da estaca. Pela Figura 2.14
pode observar que a influência do solo só começa a se manifestar no instante
( ) cDLt −+ 21 , com a chegada das primeiras reflexões.
Digamos que a amplitude inicial na trajetória XY da onda ascendente é ↑XF . Essa
onda sofrerá um acréscimo na sua amplitude, conforme a Figura 2.14, que pode ser
escrito da seguinte maneira:
( )dzzRFFz
oAXY ∫+↑↑=
21
(2.41)
Quando o ponto X é atingido pela primeira onda descendente, tem-se 0↑=XF , e
então teremos:
( )dzzRFz
AY ∫↑=02
1 (2.42)
Analogamente, para a trajetória P’Q’ (considerando P’ um ponto imediatamente
acima da ponta da estaca), para a primeira onda descendente, tem-se:
∑↑= AQ RF21
' (2.43)
onde
( )dzzRRD
AA ∫∑ =0

32
Σ RA
Σ RAz
z
F, Z.v
t
RP
RA4
RA3
RA2
RA1
RA5
F
Z.v
Σ RA
t1 t1+2L/c t = 2z/c
Figura 2.13 - Registro típico das curvas de força e velocidade
(VELLOSO e LOPES, 2002)
z
RP
t1 t2 =
t1+2L
/c
DL
nível da instrumentação t1
+2(L
-D)/c
A
X
P
P'
U QQ'
Y
t1+2(
L-D
+z)/c
Figura 2.14 - Diagrama das trajetórias das ondas de tensão (JANSZ et al., 1976)
dzzRz
A )(0∫

33
Para o caso de uma estaca com resistência de ponta finita, temos que a resistência de
ponta será igual à onda de força descendente acrescida da onda de força ascendente,
ou seja, ↑+↓= PPP FFR ou ↓−↑= PPP FRF .
Como
∑−↓↓= AAP RFF21
(2.44)
então tem-se
∑+↓−↑= AAPP RFRF21
(2.45)
Agora a Equação 2.45 pode ser escrita na forma geral, lembrando das Equações 2.28 e
2.29, e que o trem de ondas atinge o ponto A, nível da instrumentação, no instante t1,
enquanto a onda refletida em Q é registrada no nível da instrumentação em t2 = t1 +
2L/c:
∑+=⋅−
+⋅+
APtttt RR
vZFvZF22
2211 (2.46)
( ) ( ){ }212121
ttttAP vvZFFRRR −++=+= ∑ (2.47)
A equação acima é a expressão básica do método CASE, mostrando que a resistência
total da estaca, R, pode ser pode ser determinada através dos registros de força e
velocidade medidos na cabeça da estaca, durante a passagem da onda de tensão.
Podemos determinar ainda a parcela dinâmica e estática da resistência. A parcela
dinâmica é considerada, de forma simplificada, proporcional à velocidade da ponta da
estaca, vP, da seguinte forma:
PP
cd vc
AEJR ⋅
⋅⋅= (2.48)

34
onde Jc é a constante de amortecimento do método Case.
Considerando-se que a força descendente (medida em t1) chega à ponta da estaca
reduzida na sua magnitude de metade do atrito lateral, e lembrando das Equações 2.28
e ( )PP RFZv −↓⋅= 21 , chega-se a:
ZRR
vZFv PA
ttP
121
22 11
⎭⎬⎫
⎩⎨⎧
−⎥⎦
⎤⎢⎣
⎡ −⋅+
= ∑
[ ]{ }Z
RRvZFv PAttP1
11 ∑ −−⋅+=
[ ]{ }Z
RvZFv ttP1
11 −⋅+=
Para o instante t1 não há ondas ascendentes provenientes de reflexões, havendo então
uma proporcionalidade entre força e velocidade de partícula ( vZF ⋅= ), podendo-se
escrever:
RAE
cvZRvv
pttP ⋅
⋅−⋅=−⋅= 11 22 (2.49)
Substituindo a Equação 2.49 em 2.48, tem-se
⎟⎠⎞
⎜⎝⎛ −⋅
⋅⋅= Rv
cAE
JR tP
cd 12 (2.50a)
ou
( )RFJR tcd −⋅= 12 (2.50b)
A resistência estática é então obtida, pela diferença entre a resistência total (Equação
2.47) e a dinâmica:
( )RFJRR tcu −⋅−= 12 (2.51)
35
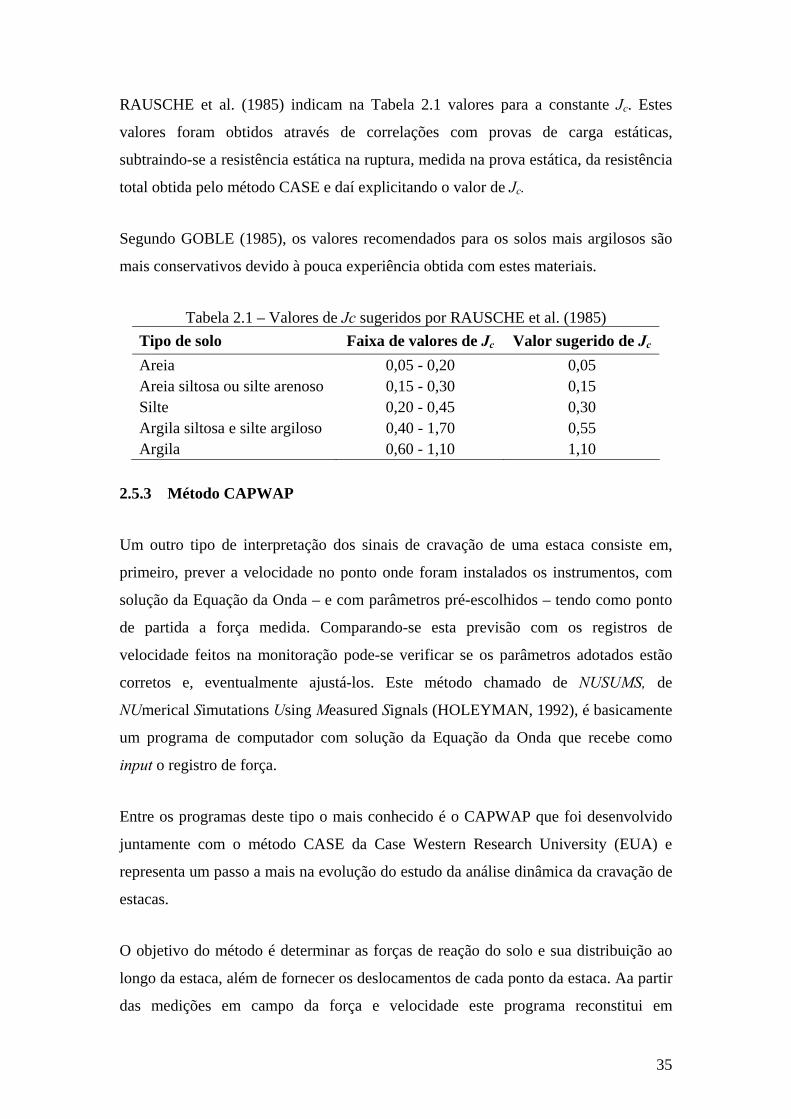
RAUSCHE et al. (1985) indicam na Tabela 2.1 valores para a constante Jc. Estes
valores foram obtidos através de correlações com provas de carga estáticas,
subtraindo-se a resistência estática na ruptura, medida na prova estática, da resistência
total obtida pelo método CASE e daí explicitando o valor de Jc.
Segundo GOBLE (1985), os valores recomendados para os solos mais argilosos são
mais conservativos devido à pouca experiência obtida com estes materiais.
Tabela 2.1 – Valores de Jc sugeridos por RAUSCHE et al. (1985) Tipo de solo Faixa de valores de Jc Valor sugerido de Jc Areia 0,05 - 0,20 0,05 Areia siltosa ou silte arenoso 0,15 - 0,30 0,15 Silte 0,20 - 0,45 0,30 Argila siltosa e silte argiloso 0,40 - 1,70 0,55 Argila 0,60 - 1,10 1,10
2.5.3 Método CAPWAP
Um outro tipo de interpretação dos sinais de cravação de uma estaca consiste em,
primeiro, prever a velocidade no ponto onde foram instalados os instrumentos, com
solução da Equação da Onda – e com parâmetros pré-escolhidos – tendo como ponto
de partida a força medida. Comparando-se esta previsão com os registros de
velocidade feitos na monitoração pode-se verificar se os parâmetros adotados estão
corretos e, eventualmente ajustá-los. Este método chamado de NUSUMS, de
NUmerical Simutations Using Measured Signals (HOLEYMAN, 1992), é basicamente
um programa de computador com solução da Equação da Onda que recebe como
input o registro de força.
Entre os programas deste tipo o mais conhecido é o CAPWAP que foi desenvolvido
juntamente com o método CASE da Case Western Research University (EUA) e
representa um passo a mais na evolução do estudo da análise dinâmica da cravação de
estacas.
O objetivo do método é determinar as forças de reação do solo e sua distribuição ao
longo da estaca, além de fornecer os deslocamentos de cada ponto da estaca. Aa partir
das medições em campo da força e velocidade este programa reconstitui em
36
laboratório o processo de cravação de estacas. Os parâmetros do solo são inicialmente
admitidos, nos vários trechos em que se subdividiu a estaca, conforme Figura 2.6 e do
modelo da Figura 2.7. O movimento de penetração da estaca no solo é então simulado
através da resolução da Equação da Onda, utilizando como condição de contorno uma
das variáveis medidas, ou a combinação das duas na forma ( ) 2ZvF ⋅+ (onda
descendente), onde Z é a impedância da estaca. A cada iteração modificam-se os
parâmetros adotados para o solo até ocorrer em perfeito ajuste das curvas medidas em
campo com as calculadas. A curva de força, por exemplo, calculada no topo da estaca
é comparada com o sinal medido, e o modelo do solo é iterativamente modificado, até
que se alcance o mais perfeito ajuste possível entre os resultados. Ao final, obtém-se a
reação mobilizada pelo golpe do martelo, bem como sua distribuição ao longo da
profundidade.
A NBR 13208 (1994) cita que os resultados obtidos e processados pelo método do
tipo CASE deverão ser confirmados e calibrados através da análise numérica do tipo
CAPWAP.
Todo o processo computacional do programa CAPWAP pode ser resumido no
fluxograma da Figura 2.15.

37
Figura 2.15 – Fluxograma do programa CAPWAP (ALVES e LOPES, 2004)
2.6 PROVAS DE CARGA ESTÁTICAS
As provas de carga estáticas são consideradas como um dos ensaios de campo mais
importantes da engenharia de fundações. Segundo VARGAS (1990), a prática de
avaliar fundações por meio de provas de carga sobre estacas foi introduzida no Brasil
pela Companhia Internacional de Estacas Frankignoul, a qual solicitou ao I.P.T. que
as planejasse e executasse. VARGAS (1990) diz que a primeira delas foi sobre estacas
tipo Franki das fundações da Estação da E.F. Noroeste, em Bauru, realizada pelo
I.P.T. em fevereiro de 1936, dois anos antes da instalação da sua Seção de Solos e
Fundações.
A NBR 12131 (1992) prescreve procedimentos de execução de prova de carga em
estacas, visando a fornecer elementos para avaliar a comportamento carga x
deslocamento e estimar a capacidade de carga.
A grande vantagem da prova de carga estática é se produzir no ensaio o tipo de
carregamento a que a estaca estará sujeita na obra.
Preparar modelo da estaca
Assumir Resistência total Ru, sua distribuição,
Q e J em cada trecho
Análise da estaca submetida a F ou v ou
( ) 2ZvF ⋅+
Plotar grandeza complementar
medida e computada
Corrigir Ru, Q, J
Coincidência suficientemente
boa?
Não
Sim Fazer relatórios de saída

38
A NBR 6122 (1996) admite uma significativa redução em coeficientes de segurança a
serem adotados na obra caso tenham sido realizadas, “a priori”, provas de carga em
quantidade adequada. No entanto, a maioria dos ensaios são realizados para
verificação de desempenho de um elemento de fundação, quanto à ruptura e recalque,
“a posteriori”. É conveniente ressaltar que alguns aspectos com influência no
comportamento do elemento de fundação podem não ser envolvidos nos ensaios
usuais como, por exemplo, o histórico correto do carregamento.
Em termos de modo de aplicação de cargas, as provas de carga estáticas se dividem
em 3 categorias:
• carga controlada:
a) carga incremental lenta
b) carga incremental rápida
c) carga cíclica (rápida e lenta)
• penetração controlada
• método do equilíbrio
Ensaios de Carga Controlada
Os ensaios de carga incremental são os mais comuns dentre os ensaios de carga
controlada. Este ensaio apresenta duas variantes: ensaio lento e ensaio rápido. No
ensaio lento os incrementos de carga são mantidos até a estabilização, enquanto que
no ensaio rápido os incrementos de carga são mantidos por um tempo pré-
estabelecido, normalmente 15 minutos. Estas provas são conhecidas pelas siglas
inglesas SML (slow maintained load) e QML (quick maintained load). Os ensaios de
carga cíclica são ensaios especiais em que o projetista, já prevendo um certo padrão
de carregamento, especifica este padrão para ensaio.
Ensaio de Carga Incremental Lenta
Este ensaio é o que melhor se aproxima do carregamento que a estaca terá sob a
estrutura futura nos casos mais correntes. Como uma estabilização completa só seria
atingida a tempos muito grandes, a norma permite que se considere estabilizado o

39
recalque quando em duas leituras sucessivas o recalque não exceder 5% do recalque
total observado no mesmo estágio de carregamento. A NBR 12131 adota este critério,
porém fixa um mínimo de 30 minutos para cada estágio. A carga aplicada em cada
estágio não deve ser superior a 20% da carga de trabalho prevista para a estaca
ensaiada. Os intervalos de tempo entre leituras seguem aproximadamente uma
progressão geométrica de razão igual a dois, com a leitura inicial na aplicação da
carga, e a segunda um minuto depois. Não sendo atingida a ruptura da estaca, a carga
máxima do ensaio deve ser mantida durante um intervalo mínimo de 12 horas entre a
estabilização dos recalques e o início do descarregamento. O descarregamento deve
ser feito em, no mínimo, quatro estágios. Da mesma forma é feita a leitura dos
recalques até que se observe a estabilização dos deslocamentos, obedecendo em cada
estágio o tempo mínimo de 15 minutos. Após o descarregamento total, as leituras dos
recalques devem continuar até a sua estabilização.
Figura 2.16 – Ensaio de carga incremental lenta (VELLOSO e LOPES, 2002)
Ensaio de Carga Incremental Rápida
Este ensaio difere do ensaio lento basicamente por manter os estágios de carga e
descarga por tempos determinados, independentemente da estabilização. A carga
aplicada em cada estágio não deve ser superior a 10% da carga de trabalho prevista
para a estaca ensaiada. As leituras dos recalques são feitas apenas no início e no final
de cada estágio, sendo que em cada estágio a carga deve ser mantida durante 5
minutos, independentemente da estabilização dos recalques. Atingida a carga máxima
t
quase estabilização
Q
w

40
do ensaio, o descarregamento deve ser feito em quatro estágios, cada um mantido por
5 minutos, com a leitura dos respectivos recalques. Passados 10 minutos do
descarregamento total deve ser feita uma leitura final do recalque.
Figura 2.17 – Ensaio de carga incremental rápida (VELLOSO e LOPES, 2002)
Ensaio de Carga Incremental Cíclica Lenta
Neste ensaio o carregamento é feito em ciclos de carga-descarga, com incrementos
iguais e sucessivos não superiores a 20% da carga de trabalho prevista para a estaca
ensaiada. Em cada ciclo de carga-descarga, a carga máxima deve ser mantida até a
estabilização dos deslocamentos e, no mínimo, por 30 minutos. Os deslocamentos são
lidos após a aplicação da carga máxima correspondente em cada ciclo, seguindo-se
leituras decorridos 2 minutos, 4 minutos, 8 minutos, 15 minutos, 30 minutos, 1 hora, 2
horas, 3 horas, etc., contados a partir do início do estágio, até se atingir a
estabilização. Considera-se atendida a estabilização dos deslocamentos quando a
diferença entre duas leituras consecutivas corresponder a, no máximo, 5% do
deslocamento havido no mesmo estágio (entre o deslocamento da estabilização do
estágio anterior e o atual). Quando não atingida a ruptura da estaca, a carga máxima
do ensaio deve ser mantida durante um tempo mínimo de 12 horas entre a
estabilização dos recalques e o início do descarregamento do último ciclo, sendo que,
os descarregamentos em cada ciclo devem ser feitos de uma só vez, em um único
estágio por ciclo. A carga nula no topo, em cada ciclo, é mantida até a estabilização
dos deslocamentos com registro segundo os mesmos critérios adotados para a fase de
carregamento.
t
Q
w
41
Ensaio de Carga Incremental Cíclica Rápida
Este ensaio difere do ensaio descrito anteriormente basicamente por fixar o tempo dos
ciclos de carga-descarga, independentemente da estabilização dos recalques. Neste
ensaio o carregamento é feito em ciclos de carga-descarga, com incrementos iguais e
sucessivos não superiores a 10% da carga de trabalho prevista para a estaca ensaiada.
Em cada ciclo de carga-descarga, a carga máxima é aplicada de uma só vez e deve ser
mantida por 10 minutos, independentemente da estabilização dos recalques. O
recalque máximo do topo deve ser, no mínimo, 10 a 20% do diâmetro da estaca, de
forma a garantir, para as cargas máximas dos ciclos finais, o esgotamento do atrito
lateral e que se avance no desenvolvimento da resistência de ponta. Os deslocamentos
são lidos obrigatoriamente no início e no final de cada ciclo. Após atingida a carga
máxima do ensaio devem ser feitas 5 leituras: a 10 minutos, 30 minutos, 60 minutos,
90 minutos e 120 minutos. Os descarregamentos, em cada ciclo, devem ser feitos de
uma só vez, em um único estágio por ciclo. A carga nula no topo, em cada ciclo, é
mantida por 10 minutos, com a leitura dos respectivos deslocamentos. Após 10
minutos do descarregamento total do último ciclo, devem ser feitas mais duas leituras
adicionais a 30 minutos e 60 minutos.
Método de Penetração Controlada
Este método é mais conhecido como ensaio de velocidade de penetração constante
(constant rate of penetration test ou CRP), desenvolvido no Reino Unido
(WHITAKER e COOKE, 1961). Neste ensaio o carregamento é feito com um macaco
que recebe óleo a uma vazão constante, enviado por uma bomba elétrica. Com as
velocidades de penetração usualmente adotadas no Reino Unido, a estaca é levada à
ruptura em poucas horas, o que o classifica como um ensaio rápido.

42
Figura 2.18 – Método de penetração controlada (VELLOSO e LOPES, 2002)
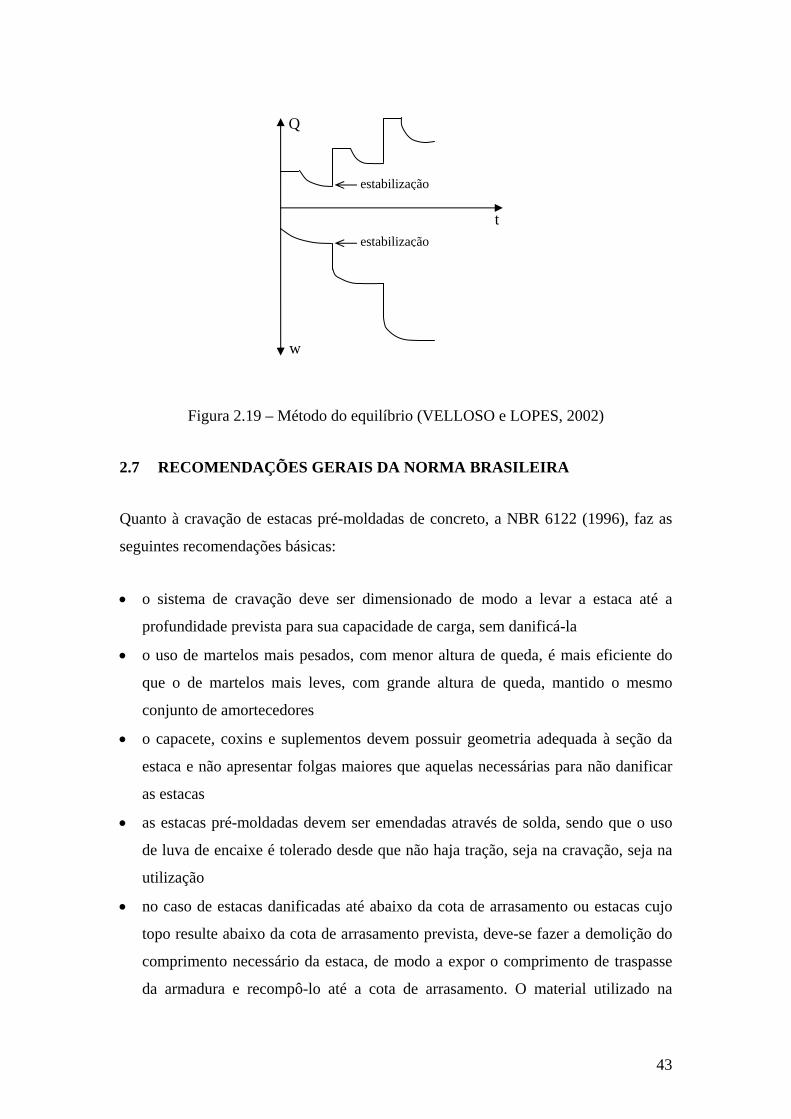
Método do Equilíbrio
Este ensaio é um método alternativo proposto por MOHAN et al. (1967), como
tentativa de suprir a falta de confiabilidade na prova de carga rápida e a demora ou
possível inviabilidade de uma prova de carga lenta. Neste método, após se atingir a
carga do estágio e mantê-la constante por um tempo (5 a 10 minutos), a carga é
deixada relaxar (não se bombeando mais o macaco) até que se não se observem mais
recalques ou variações de carga. Este equilíbrio é atingido com um tempo
relativamente curto, assim, a carga de equilíbrio atingida no estágio corresponde a um
recalque estabilizado.
Este método é bastante interessante, e foi estudado em algumas teses da COPPE,
como de FERREIRA (1985), ALVES (2004) e FRANCISCO (2004).
Segundo FRANCISCO (2004), em seu trabalho experimental, durante a realização da
prova de carga de equilíbrio, observou-se que havia uma redução contínua da carga
aplicada ao topo da estaca no tempo, enquanto que o deslocamento do topo da estaca
era insignificante. Estes dois fatos observados simultaneamente configuram o
fenômeno da relaxação de tensões do sistema solo-estaca-estrutura de reação.
t
Q
w
43
Figura 2.19 – Método do equilíbrio (VELLOSO e LOPES, 2002)
2.7 RECOMENDAÇÕES GERAIS DA NORMA BRASILEIRA
Quanto à cravação de estacas pré-moldadas de concreto, a NBR 6122 (1996), faz as
seguintes recomendações básicas:
• o sistema de cravação deve ser dimensionado de modo a levar a estaca até a
profundidade prevista para sua capacidade de carga, sem danificá-la
• o uso de martelos mais pesados, com menor altura de queda, é mais eficiente do
que o de martelos mais leves, com grande altura de queda, mantido o mesmo
conjunto de amortecedores
• o capacete, coxins e suplementos devem possuir geometria adequada à seção da
estaca e não apresentar folgas maiores que aquelas necessárias para não danificar
as estacas
• as estacas pré-moldadas devem ser emendadas através de solda, sendo que o uso
de luva de encaixe é tolerado desde que não haja tração, seja na cravação, seja na
utilização
• no caso de estacas danificadas até abaixo da cota de arrasamento ou estacas cujo
topo resulte abaixo da cota de arrasamento prevista, deve-se fazer a demolição do
comprimento necessário da estaca, de modo a expor o comprimento de traspasse
da armadura e recompô-lo até a cota de arrasamento. O material utilizado na
w
t estabilização
Q
estabilização

44
recomposição das estacas deve apresentar resistência não inferior à do concreto da
estaca
• em caso de levantamento da estaca, esta deve ser recravada, de modo a garantir a
sua capacidade de carga. Este cuidado deve ser tomado tanto na cravação quanto
na recravação das estacas, posto que a recravação de uma estaca pode implicar
novo levantamento de estacas já recravadas
• quando da cravação de estacas em terreno de comportamento conhecido para a
cravação de estacas do tipo considerado, a nega final deve ser obtida quando do
término da cravação e nunca após uma interrupção
• em terreno cujo comportamento não é conhecido, uma nova nega deve ser
determinada após alguns dias do término da cravação. Quando a nova nega for
superior à obtida no final da cravação, as estacas devem ser recravadas
• quando a nova nega for inferior à obtida ao final da cravação, devem-se realizar no
máximo duas séries de 10 golpes para evitar repetição do fenômeno de perda
momentânea da resistência ou danificação da estaca
• a realização de provas de carga sobre estacas deve ser feita após algum tempo da
execução da estaca. Este intervalo depende do tipo da estaca e da natureza do
terreno. Quanto ao solo, ele varia de poucas horas para os solos não coesivos a
alguns dias para os solos argilosos
A norma brasileira especifica ainda que o controle executivo de estacas pré-moldadas
deve incluir o registro dos seguintes elementos:
• comprimento real da estaca abaixo da cota de arrasamento
• suplemento utilizado – tipo e comprimento
• desaprumo e desvio de locação
• características do equipamento de cravação
• negas ou repiques no final de cravação e na recravação, quando houver
• anormalidades de execução
45
2.8 RECOMENDAÇÕES GERAIS DO EUROCÓDIGO 7
A parte 1 do EUROCÓDIGO 7 (EN 1997-2004) apresenta algumas recomendações
gerais quanto à supervisão da cravação de estacas. Sugere-se que o registro de cada
estaca inclua, quando tal for apropriado, as seguintes informações:
• o tipo de estaca e o equipamento utilizado na cravação
• o número da estaca
• a seção transversal e o comprimento da estaca
• a data e a hora de cravação (incluindo interrupções no processo de cravação)
• os valores das medições necessárias à estimativa da resistência à cravação, tais
como peso, altura de queda ou potência do martelo, a freqüência dos golpes e o
número de golpes pelo menos para os últimos 25 cm de penetração
• obstruções encontradas durante a cravação das estacas
• desvios de posição e de direção e cotas após a cravação
De acordo com o EUROCÓDIGO 7 (EN 1997-2004), os estados limites a considerar
no dimensionamento de estacas são os seguintes:
• perda de estabilidade global (efeito de grupo)
• ruptura por insuficiente capacidade resistente do solo (ruptura por compressão)
• ruptura por arrancamento devido a insuficiente capacidade resistente do solo
(ruptura por tração)
• ruptura devido a insuficiente resistência do solo a carregamentos transversais
• ruptura estrutural da estaca por tração, flexão, flambagem ou cisalhamento
• ruptura conjunta no solo e na estrutura da estaca
• recalques excessivos
• levantamento do solo excessivo
• vibrações excessivas
Quanto ao dimensionamento de estacas sob ações verticais, este deve ser feito com
base em um dos seguintes procedimentos:
• utilização de resultados de provas de carga estáticas

46
• aplicação de métodos analíticos ou empíricos cuja validade tenha sido
demonstrada através de provas de carga estáticas em situações comparáveis
• aplicação de resultados de ensaios dinâmicos cuja validade tenha sido
demonstrada através de provas de carga estáticas em situações comparáveis
No que diz respeito à durabilidade, tratando-se de elementos em contato direto com o
solo, é conveniente verificar a presença de agentes agressivos, tais como águas ácidas
ou que contenham sulfatos.

47
CAPÍTULO 3
DIAGRAMA DE CRAVAÇÃO COMO MÉTODO DE
VERIFICAÇÃO DO PERFIL DE RESISTÊNCIA DO TERRENO
3.1 INTRODUÇÃO
Chama-se diagrama de cravação à representação do registro do número de golpes do
martelo, Nestaca, necessários para cravar um dado comprimento de estaca. Esse número
de golpes tem uma relação direta com a nega: dividindo-se o comprimento escolhido
pelo número de golpes do martelo tem-se a nega (média naquele comprimento). A
Figura 3.1 abaixo ilustra o registro e o diagrama de cravação.
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
0 20 40 60 80
Nestaca
Pro
fund
idad
e (m
)
Figura 3.1 – Planilha preenchida no campo e representação gráfica do
diagrama de cravação
48
Neste capítulo é feita uma avaliação da possibilidade de que o diagrama de cravação
sirva para a verificação do perfil de resistência do terreno, normalmente caracterizado
pelo ensaio SPT. Ainda, caso se consiga estabelecer esta relação entre diagrama de
cravação e perfil de SPT, será possível, para um dado terreno, prever a cravabilidade
de uma estaca com um dado martelo.
3.2 O DIAGRAMA DE CRAVAÇÃO E A PRÁTICA BRASILEIRA E
INTERNACIONAL
O manual da ABEF (1999) define como diagrama de cravação o documento de
registro do número de golpes necessários para a penetração, em geral de 0,50 m ou
1,00 m de estaca, para uma determinada altura de queda do martelo. No Brasil, o mais
comum é a elaboração do diagrama de cravação com intervalos de medição de 0,50
m, embora em alguns casos ainda se pratique a elaboração deste com intervalos de
1,00 m. A norma francesa prescreve que o diagrama deve ser feito em intervalos de
medição de 30 cm. Nos Estados Unidos, o intervalo é de 30 cm (1 pé) e o número de
golpes para cravar este comprimento de estaca é conhecido como “blows per foot”
(BPF).
A norma brasileira NBR 6122 (1996) recomenda que em um estaqueamento deve-se
elaborar o diagrama de cravação em pelo menos 10% das estacas, sendo
obrigatoriamente incluídas aquelas mais próximas aos furos de sondagem.
É importante ressaltar que a eficácia do diagrama de cravação como instrumento de
controle do estaqueamento é possível desde que, durante a fase de cravação da estaca,
a altura de queda do martelo seja mantida, para que não haja variação da energia
aplicada à estaca. Às vezes, na passagem por camadas de argila mole, se utilizam
alturas de queda menores; nesse caso, a altura utilizada deve ser anotada. Tomando
estes cuidados, é possível comparar o diagrama de cravação de uma estaca com a
sondagem SPT executada próxima à estaca.
49
3.3 DIAGRAMA DE CRAVAÇÃO COM DIFERENTES INTERVALOS DE
MEDIÇÃO E EFEITO DE GRUPO
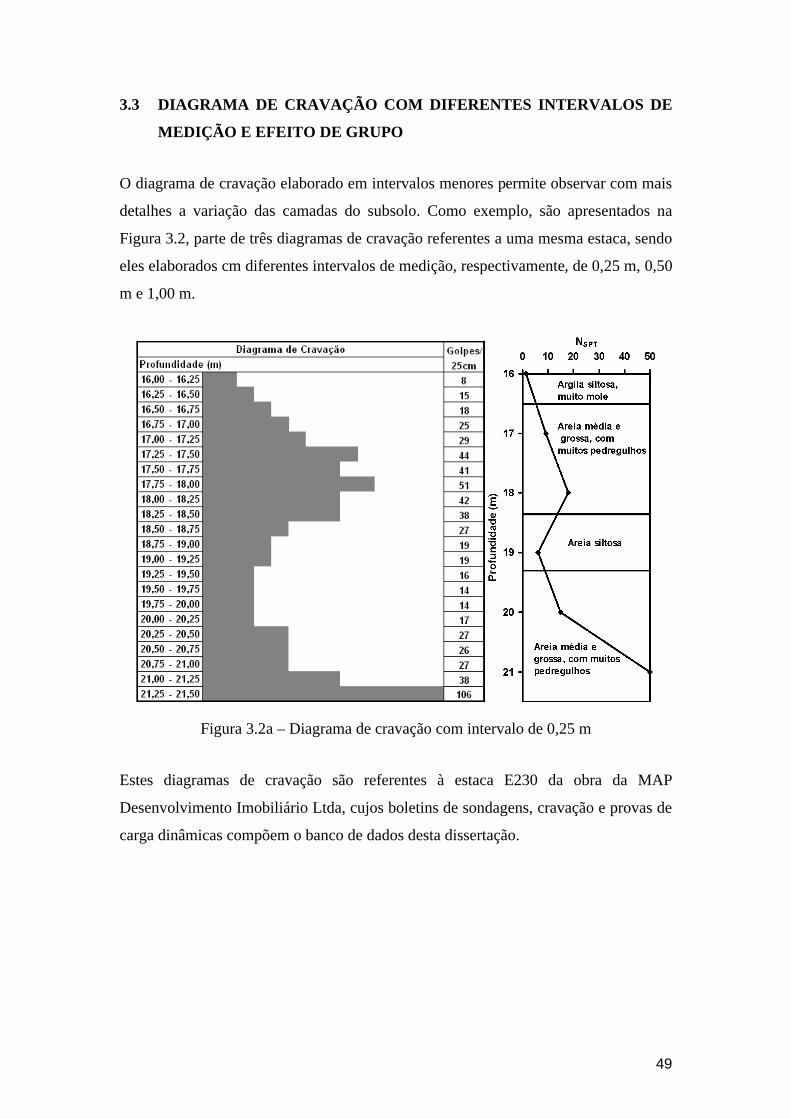
O diagrama de cravação elaborado em intervalos menores permite observar com mais
detalhes a variação das camadas do subsolo. Como exemplo, são apresentados na
Figura 3.2, parte de três diagramas de cravação referentes a uma mesma estaca, sendo
eles elaborados cm diferentes intervalos de medição, respectivamente, de 0,25 m, 0,50
m e 1,00 m.
Figura 3.2a – Diagrama de cravação com intervalo de 0,25 m
Estes diagramas de cravação são referentes à estaca E230 da obra da MAP
Desenvolvimento Imobiliário Ltda, cujos boletins de sondagens, cravação e provas de
carga dinâmicas compõem o banco de dados desta dissertação.

50
Figura 3.2b – Diagrama de cravação com intervalo de 0,50 m
Figura 3.2c – Diagrama de cravação com intervalo de 1,00 m

51
Nos diagramas de cravação acima se observa a presença de uma camada de solo
resistente entre 16,5 m e 18,5 m. Estes diagramas se relacionam com o perfil de
sondagem (ao lado), que ali indicava uma camada de areia média e grossa com
pedregulhos. À medida que se aumenta o intervalo de medição do diagrama (Figura
3.2b e Figura 3.2c) perde-se a definição desta camada resistente. Isto mostra o quanto
é importante a elaboração destes diagramas em intervalos menores. O intervalo
mínimo deve ser de 50 cm.
Outro aspecto importante que influencia o número de golpes na cravação de uma
estaca é a ordem em que a estaca foi cravada em um grupo. É praxe se iniciar a
cravação de um grupo de estacas, próximas umas das outras, pelas estacas do centro.
A explicação é bastante óbvia: a cravação iniciada pelas bordas causaria um
confinamento do solo na região mais interna, que traria uma maior resistência à
penetração das estacas nesta região. Por exemplo, no grupo de estacas da Figura 3.3, a
cravação deve se iniciar pelas estaca 6, 7, 10 e 11 e, em seguida passar-se para as
estacas de bordo.
Figura 3.3 – Esquema de um conjunto de estacas sujeitas a um possível
efeito de grupo
Se neste caso a cravação se iniciasse nas estacas de bordo para o centro,
provavelmente existiriam diagramas de cravação com os aspectos da Figura 3.4.
1 2 3
6
9
8 7 5
4
10 11 12
16 15 14 13

52
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
0 20 40 60 80 100
Nestaca
Pro
fund
idad
e (m
)
Estacas de bordo
Estacas de centro
Figura 3.4 – Aspectos do diagrama de cravação de estacas sujeitas a
efeitos de grupo
A Figura 3.5 mostra resultados de um caso real: um grupo de 9 estacas da obra do
Laboratório de Metalúrgica da COPPE. Este é um grupo de estacas com
comprimentos variando entre 3,95 m e 4,75 m. Os diagramas de cravação de 3 destas
9 estacas mostram uma pequena variação no número de golpes, devido à ordem de
cravação das estacas. As duas primeiras estacas cravadas têm diagramas parecidos,
enquanto a terceira estaca apresenta um maior número de golpes até 3,50 m. Em
relação ao número de golpes ao final da cravação, há um efeito da heterogeneidade
horizontal do solo residual, que é típica deste tipo de solo.
Para efeito de comparação com uma sondagem, deve-se tirar o diagrama da primeira
estaca do grupo, que não estará afetado pela cravação de outras estacas.

53
Figura 3.5 – Esquema de um grupo de estacas da obra do Laboratório de
Metalúrgica
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
5,5
0 50 100 150 200 250 300
Nestaca
Pro
fund
idad
e (m
)
P23F (1a.)
P23I (2a.)
P23E (3a.)
Figura 3.6 – Diagrama de cravação de 3 estacas pertencentes a um mesmo grupo
P23A P23B P23C
P23F
P23I P23H
P23E P23D
P23G
1 m 1 m
φ = 42 cm
54
3.4 COMPARAÇÃO ENTRE O ENSAIO SPT E A CRAVAÇÃO DE UMA
ESTACA PRÉ-MOLDADA
3.4.1 Introdução
Tanto a cravação do amostrador no SPT como a cravação de uma estaca por martelo
de queda livre representam um fenômeno dinâmico, no qual há uma massa submetida
à aceleração da gravidade que cai de uma certa altura atingindo uma certa velocidade.
Esta velocidade, desprezando-se perdas por atrito, é diretamente proporcional à raiz
quadrada da altura de queda e a aceleração da gravidade:
2
21
vMhgM martelomartelo ⋅⋅=⋅⋅ ∴ hgv ⋅⋅= 2 (3.1)
A diferença básica entre a cravação de uma estaca e a cravação do amostrador no SPT
é que o segundo constitui-se em um ensaio padronizado, ou seja, é um procedimento
onde um conjunto de variáveis não muda a cada experimento (AMARAL et al.,
2002). As variáveis externas que influem no processo de cravação de uma estaca são:
peso do martelo; altura de queda; peso da estaca; área da seção da estaca;
comprimento da estaca, módulo de elasticidade da estaca; velocidade de impacto do
martelo (Equação 3.1); rigidez e coeficiente de amortecimento de cepo e coxim, peso
do capacete. Com exceção da aceleração da gravidade, todas as outras variáveis
podem assumir valores diversos para cada estaca cravada.
O ensaio SPT constitui-se em uma medida de resistência dinâmica conjugada a uma
sondagem de simples reconhecimento. Amostras representativas do solo são coletadas
a cada metro de profundidade por meio de amostrador padrão, de diâmetro externo de
50 mm. A cravação do amostrador no SPT é feita usando um peso de 65,0 kgf, caindo
de uma altura, 750 mm, sobre um conjunto de hastes de diâmetro nominal de 1
polegada, unidas por luvas, ao qual se conecta o amostrador. O valor de NSPT é o
número de golpes necessário para fazer o amostrador penetrar 300 mm, após uma
cravação inicial de 150 mm (SCHNAID, 2000).
55
A normalização do ensaio SPT foi realizada pela ASTM (1958) (Americam Society
for Testing and Materials), sendo comum em todo mundo o uso de procedimentos não
padronizados e equipamentos diferentes do padrão internacional. No Brasil o ensaio é
normalizado pela NBR 6484 (1880) (SCHNAID, 2000).
A NBR 6484 (1980) padroniza a sondagem a trado até o NA, abaixo do NA a
sondagem é realizada à percussão (SPT - Standard Penetration Test) com circulação
de água e em intervalos de profundidade de acordo com a realização de amostragem.
Segundo SCHNAID (2000) existem diferentes técnicas de perfuração, equipamentos e
procedimentos de ensaio SPT nos diferentes países, resultantes de fatores locais e grau
de desenvolvimento tecnológico do setor, o que resulta em desuniformidade de
significado dos resultados obtidos. As principais diferenças se referem ao método de
perfuração, fluido estabilizante, diâmetro do furo, mecanismo de levantamento e
liberação de queda do martelo, regidez das hastes, geometria do amostrador e método
de cravação. Além desses fatores tem-se a influência marcante das características e
condições do solo nas medidas de SPT. Uma revisão completa sobre o atual estado do
conhecimento pode ser encontrada em SKEMPTON (1986) e considerações sobre a
realidade sul-americana em MILITITSKY e SCHNAID (1995).
Existem diferenças básicas entre a cravação de uma estaca e a cravação do amostrador
no SPT. Por exemplo, durante a cravação da estaca há perdas de energia pelo
capacete, cepo e coxim; pelo atrito com as guias do martelo; pelo atrito do cabo do
martelo com as roldanas. Já no caso da cravação do amostrador no SPT há perdas pelo
atrito do cabo do martelo, pelo coxim de madeira, através da restituição elástica das
hastes, perda de energia nos acoplamentos das hastes, além da influência dos
diferentes mecanismos de levantamento e liberação da queda do martelo
(BELICANTA, 1998); assim como, na cravação da estaca não há um controle efetivo
com relação à altura de queda do martelo fixada previamente. Em ambos os casos a
energia transferida ao amostrador ou à estaca é menor que a energia nominal ( hW ⋅ ).
A cravação de uma estaca pode ser considerada por si só como um ensaio, pois
através desta é possível avaliar o comportamento do solo perante a penetração de uma
estaca, quando submetida a uma determinada energia de cravação. Sob este aspecto

56
seria de grande utilidade poder avaliar não só a capacidade de carga estática de uma
estaca através do seu diagrama de cravação (o que é feito através da nega), mas
também o perfil de resistência do terreno, caracterizado pelo número de golpes do
ensaio SPT.
AMARAL et al. (2002) apresentaram uma correlação empírica entre o número de
golpes do martelo por metro cravado de estaca e o valor do SPT da sondagem à
percussão. A população do campo amostral estudado é composto por estacas pré-
moldas de concreto circulares, cravadas por energias de cravação que variam de 15 a
30kNm, diâmetros que variam de 15 a 33 cm e comprimentos que variam de 5 a 25 m.
Só foram usadas para análise sondagens em que a quase totalidade da estaca estivesse
de seu topo até a ponta em um único desses três tipos de, como elemento principal.
Ao todo foram verificados 163 diagramas de cravação. Estas amostras foram
divididas em grupos de solos argilosos, siltosos e arenosos.
Nesta abordagem foram obtidas relações empíricas do tipo:
( )SPTSPTestaca NfNN =
onde Nestaca é o número de golpes a cada metro na cravação de uma estaca e o NSPT é o
índice de resistência à penetração no SPT.
Cada um dos grupos foi subdividido em ajuste para a ponta e atrito lateral.
Para medida do grau de dependência, que representa a variação de SPTestaca NNy =
explicada por estacaNx = foi usado o coeficiente R2, segundo o conceito de BUSSAB
(1999) quanto mais próximo R2 de 1 significa que y está mais próximo da
dependência total de x. Para escolha do ajuste foi utilizado o método dos mínimos
quadrados para ajustes lineares, logarítmicos, polinomiais de grau 1 a 3, potenciais e
exponenciais. Foi escolhida a curva que permitia o coeficiente R2 mais próximo de 1.
A Tabela 3.1 mostra as equações e coeficientes R2 das curvas ajustadas obtidas para
argila, silte e areia.

57
AMARAL et al. (2002) sugerem que o uso prático destas correlações é a conversão
dos valores de NSPT em Nestaca para posterior verificação da capacidade de carga por
um método estático.
Tabela 3.1 – Equações e coeficientes R2 das curvas ajustadas para argila, silte e areia
(AMARAL et al., 2002)
Solo Ponta R2 Lateral R2
Argila y = 0,2503x0,655 0,4227 y = 2,7516e0,023x 0,6303
Areia y = 0,446x + 0,5729 0,6384 y = 0,1161x + 0,7578 0,5462
Silte y = 3,592e0,004x 0,5220 y = 0,1548x0,6634 0,5491
O que acontece na prática é que o uso destas correlações é muito trabalhoso, uma vez
que para cada tipo se solo deverá se utilizar uma correlação específica, tanto para a
ponta quanto para o atrito lateral.
3.4.2 Correções da Cravação da Estaca com o SPT no Sentido de uma
Padronização
3.4.2.1 Introdução
As correlações apresentadas a seguir são semelhantes àquela apresentada por
AMARAL et al. (2002). A diferença básica é que foram feitas correções para a
energia de cravação, para a geometria da estaca (área lateral de fuste e área de ponta
da estaca), correção para a impedância da estaca e para a eficiência do sistema de
cravação.
Foi tomada a energia de 30 kNm como a energia padrão de cravação e a partir daí
foram realizadas correções para estacas cravadas com outras energias. Foi adotada a
estaca vazada de 42 cm de diâmetro (895 cm2 de seção de concreto) como estaca
padrão, sendo realizadas correções para estacas com geometria diferente desta.
Para todos os casos foi adotada a hipótese de que as curvas de interpolação passem
pela origem. Esta hipótese decorre do acompanhamento de obras, onde pôde-se
observar que para solos com baixa resistência, onde o NSPT é nulo, as estacas
58
penetravam no solo praticamente sem a aplicação de golpes do martelo. Então, para
um NSPT igual a 0, tem-se também o Nestaca aproximadamente igual a 0.
As figuras apresentadas a seguir mostram as correlações - para solo residual jovem de
gnaisse - entre o número de golpes para a cravação de 50 cm de estaca e o número de
golpes para a cravação do amostrador no SPT. Primeiramente, na Figura 3.7, é
apresentada a correlação sem a aplicação dos fatores de correção, e em seguida são
apresentadas correlações com diferentes correções, de acordo com os fatores julgados
importantes.
Cada figura é composta por uma nuvem de pontos (124 pontos no total), onde x
representa o número de golpes necessários para cravar 50 cm de estaca (Nestaca) e y
representa o número de golpes da sondagem SPT (NSPT).
As figuras mostram ainda o grau de correlação R que exprime numericamente como
as curvas de regressão se ajustam aos valores observados das duas variáveis x e y. O
valor de R pode variar entre -1 e 1. Quanto mais próximo de -1 ou 1 melhor é a
correlação entre as duas variáveis. Quando R for negativo implica que uma variável
cresce enquanto que a outra decresce. Se R é igual a 0 não há correlação entre x e y
(SMITH, 1986). É importante observar como o grau de correlação R varia com a
aplicação dos diferentes fatores de correção.
3.4.2.2 Correlação com Correção da Energia de Cravação e Geometria das
Estacas
Para esta correlação foram obtidas duas curvas de interpolação: uma linear e outra
polinomial de grau 2, onde y representa o NSPT, e x é o número de golpes para
cravação de 50 cm da estaca na região onde foi obtido o NSPT.
O critério de correção para a energia de cravação está calcado na fórmula de Sanders
(Equação 2.2), onde se despreza qualquer perda de energia. O fator de correção para a
energia de cravação, aqui chamado de F1, é obtido da seguinte forma:
301hW
F⋅
= (para W em kN e h em m) (3.2)

59
onde W.h representa a energia de cravação da estaca a ser corrigida no sentido de uma
padronização.
Para efeito da correção da geometria da estaca, e na falta de conhecimento do peso do
atrito lateral e da parcela correspondente à ponta sobre o Nestaca, foi estipulado um
peso de 50% tanto para a área de fuste quanto para a área de ponta. A correção da
geometria da estaca fica definida como
42,42,
422
15,0
15,0
φφ
φ
lateral
lateral
ponta
pontaestaca
AA
A
AN
NF ⋅+⋅== (3.3)
onde Nφ42 é o número de golpes para a cravação de 50 cm da estaca padrão, e Nestaca é
número de golpes para a cravação de 50 cm da estaca com geometria qualquer.
Esta correção visa, de maneira bastante simples, fazer uma compensação entre o
número de golpes na cravação de estacas com geometrias diferentes daquela estaca
tomada como a padrão.
Os fatores de correção para a geometria da estaca ( 2F ) obtidos de acordo com a
Equação (3.3) constam da Tabela 3.2.
Tabela 3.2 – Fatores de correção para a área de ponta e lateral da estaca
Área de concreto Área Área lateral Estaca padrão na seção de ponta para 1 m
Ø = 42 cm transversal (fechada) de estaca Tipos de estacas (cm2) (cm2) (cm2)
F2
Incopre - Ø = 26 cm 531 531 8168 2,00 Scac - Ø =33(7) cm 572 855 10367 1,43
Incopre - Ø = 33(7,5) cm 600 855 10367 1,43 Precon - 25,5 x 25,5 cm 650 650 10200 1,61
Cassol - 26 x 26 cm 676 676 10200 1,59 Cassol - 30 x 30 cm 900 900 12000 1,28 Precon - 28 x 28 cm 784 784 11200 1,41
Incopre - Ø = 42(8,5) cm 895 1385 13195 1,00 Scac - Ø = 50(9) cm 1159 1963 15708 0,77
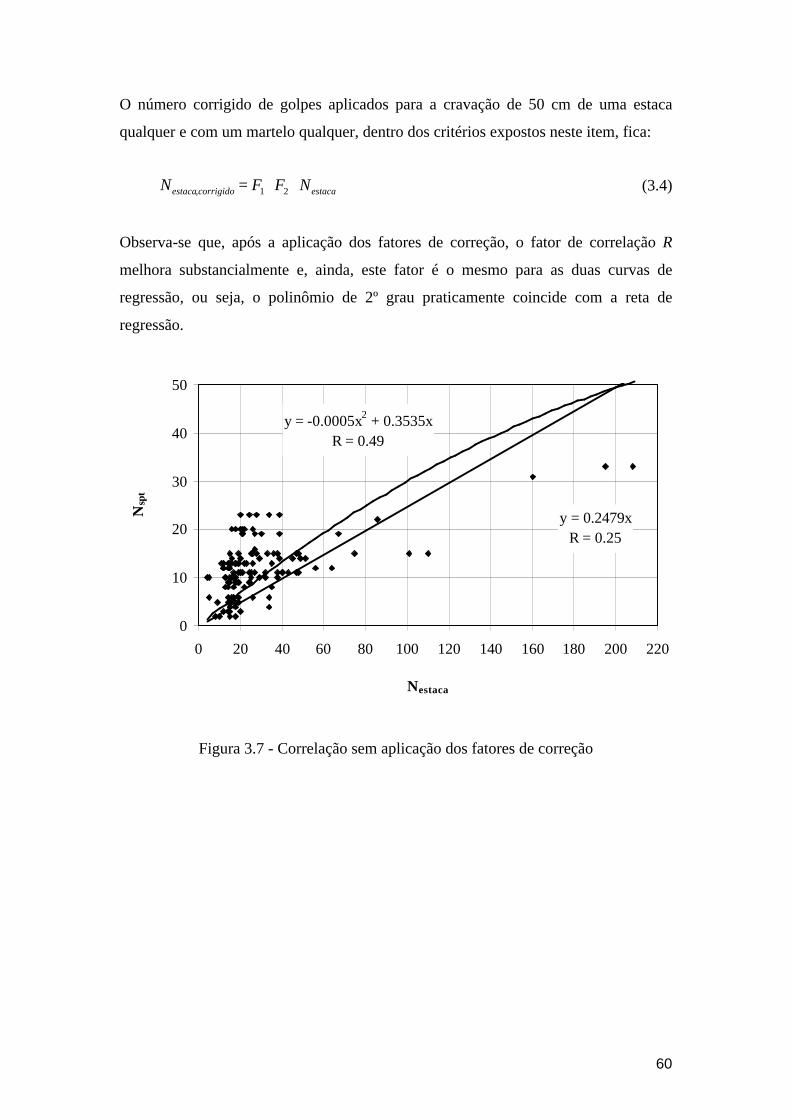
60
O número corrigido de golpes aplicados para a cravação de 50 cm de uma estaca
qualquer e com um martelo qualquer, dentro dos critérios expostos neste item, fica:
estacacorrigidoestaca NFFN ⋅⋅= 21, (3.4)
Observa-se que, após a aplicação dos fatores de correção, o fator de correlação R
melhora substancialmente e, ainda, este fator é o mesmo para as duas curvas de
regressão, ou seja, o polinômio de 2º grau praticamente coincide com a reta de
regressão.
y = 0.2479xR = 0.25
y = -0.0005x2 + 0.3535xR = 0.49
0
10
20
30
40
50
0 20 40 60 80 100 120 140 160 180 200 220
Nestaca
Nsp
t
Figura 3.7 - Correlação sem aplicação dos fatores de correção
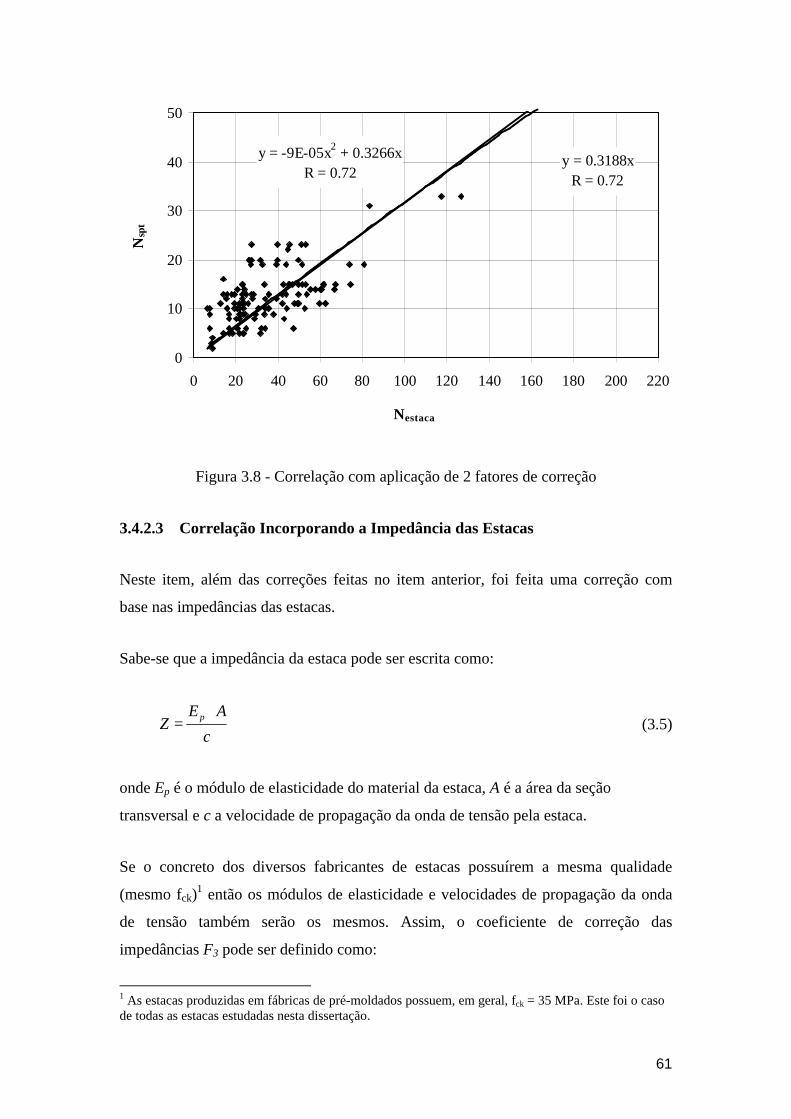
61
y = -9E-05x2 + 0.3266xR = 0.72
y = 0.3188xR = 0.72
0
10
20
30
40
50
0 20 40 60 80 100 120 140 160 180 200 220
Nestaca
Nsp
t
Figura 3.8 - Correlação com aplicação de 2 fatores de correção
3.4.2.3 Correlação Incorporando a Impedância das Estacas
Neste item, além das correções feitas no item anterior, foi feita uma correção com
base nas impedâncias das estacas.
Sabe-se que a impedância da estaca pode ser escrita como:
c
AEZ p ⋅
= (3.5)
onde Ep é o módulo de elasticidade do material da estaca, A é a área da seção
transversal e c a velocidade de propagação da onda de tensão pela estaca.
Se o concreto dos diversos fabricantes de estacas possuírem a mesma qualidade
(mesmo fck)1 então os módulos de elasticidade e velocidades de propagação da onda
de tensão também serão os mesmos. Assim, o coeficiente de correção das
impedâncias F3 pode ser definido como:
1 As estacas produzidas em fábricas de pré-moldados possuem, em geral, fck = 35 MPa. Este foi o caso de todas as estacas estudadas nesta dissertação.
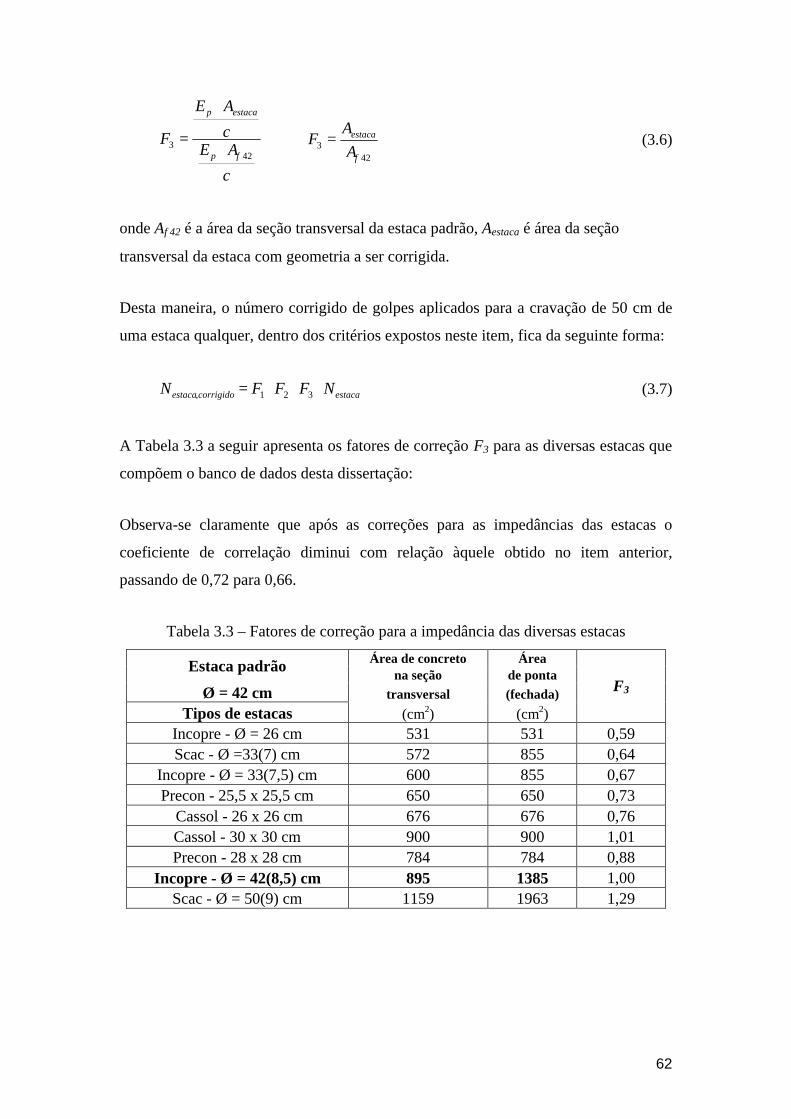
62
c
AEc
AE
Fp
estacap
423
φ⋅
⋅
= ∴ 42
3φA
AF estaca= (3.6)
onde Aφ42 é a área da seção transversal da estaca padrão, Aestaca é área da seção
transversal da estaca com geometria a ser corrigida.
Desta maneira, o número corrigido de golpes aplicados para a cravação de 50 cm de
uma estaca qualquer, dentro dos critérios expostos neste item, fica da seguinte forma:
estacacorrigidoestaca NFFFN ⋅⋅⋅= 321, (3.7)
A Tabela 3.3 a seguir apresenta os fatores de correção F3 para as diversas estacas que
compõem o banco de dados desta dissertação:
Observa-se claramente que após as correções para as impedâncias das estacas o
coeficiente de correlação diminui com relação àquele obtido no item anterior,
passando de 0,72 para 0,66.
Tabela 3.3 – Fatores de correção para a impedância das diversas estacas
Área de concreto Área Estaca padrão na seção de ponta
Ø = 42 cm transversal (fechada) Tipos de estacas (cm2) (cm2)
F3
Incopre - Ø = 26 cm 531 531 0,59 Scac - Ø =33(7) cm 572 855 0,64
Incopre - Ø = 33(7,5) cm 600 855 0,67 Precon - 25,5 x 25,5 cm 650 650 0,73
Cassol - 26 x 26 cm 676 676 0,76 Cassol - 30 x 30 cm 900 900 1,01 Precon - 28 x 28 cm 784 784 0,88
Incopre - Ø = 42(8,5) cm 895 1385 1,00 Scac - Ø = 50(9) cm 1159 1963 1,29
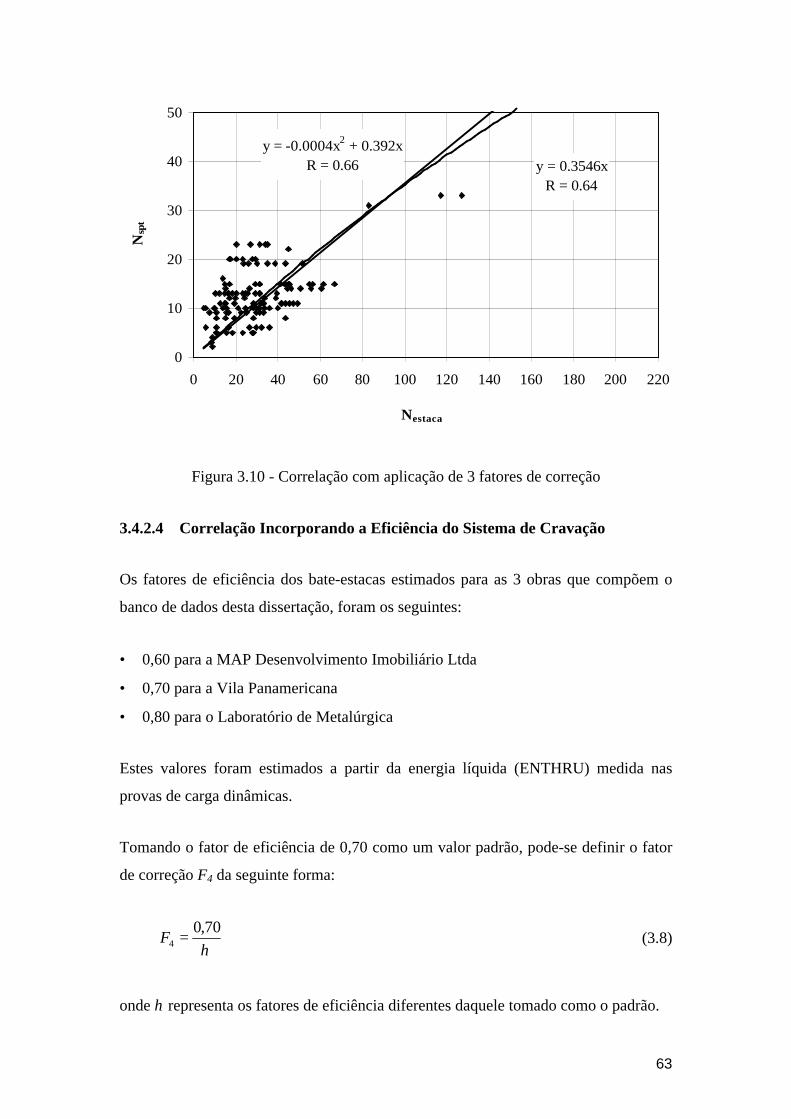
63
y = 0.3546xR = 0.64
y = -0.0004x2 + 0.392xR = 0.66
0
10
20
30
40
50
0 20 40 60 80 100 120 140 160 180 200 220
Nestaca
Nsp
t
Figura 3.10 - Correlação com aplicação de 3 fatores de correção
3.4.2.4 Correlação Incorporando a Eficiência do Sistema de Cravação
Os fatores de eficiência dos bate-estacas estimados para as 3 obras que compõem o
banco de dados desta dissertação, foram os seguintes:
• 0,60 para a MAP Desenvolvimento Imobiliário Ltda
• 0,70 para a Vila Panamericana
• 0,80 para o Laboratório de Metalúrgica
Estes valores foram estimados a partir da energia líquida (ENTHRU) medida nas
provas de carga dinâmicas.
Tomando o fator de eficiência de 0,70 como um valor padrão, pode-se definir o fator
de correção F4 da seguinte forma:
η70,0
4 =F (3.8)
onde η representa os fatores de eficiência diferentes daquele tomado como o padrão.

64
Desta maneira, o número corrigido de golpes aplicados para a cravação de 50 cm de
uma estaca qualquer, dentro dos critérios expostos neste item, fica da seguinte forma:
estacacorrigidoestaca NFFFN ⋅⋅⋅= 421, (3.9)
Aplicando estes fatores de correção na nuvem de pontos da Figura 3.7 resulta a
correlação apresentada na Figura 3.11.
y = 0.3329xR = 0.71
y = 1E-04x2 + 0.3253xR = 0.71
0
10
20
30
40
50
0 20 40 60 80 100 120 140 160 180 200 220
Nestaca
Nsp
t
Figura 3.11 - Correlação com aplicação de 3 fatores de correção
Observa-se que a correlação ficou praticamente igual àquela obtida no Item 3.4.2.2
( 71,0=R ).
3.4.2.5 Correlação com Todos os Fatores de Correção
Considerando simultaneamente todas as correções descritas nos itens anteriores, o
número corrigido de golpes aplicados para a cravação de 50 cm de uma estaca
qualquer fica da seguinte maneira:
estacacorrigidoestaca NFFFFN ⋅⋅⋅⋅= 4321, (3.10)

65
Aplicando estes fatores de correção na nuvem de pontos da Figura 3.7 resulta a
correlação apresentada na Figura 3.12.
y = -0.0002x2 + 0.3972xR = 0.66
y = 0.3776xR = 0.66
0
10
20
30
40
50
0 20 40 60 80 100 120 140 160 180 200 220
Nestaca
Nsp
t
Figura 3.12 - Correlação com aplicação de 4 fatores de correção
Observa-se que após a aplicação de todos os coeficientes de correção o fator de
correlação R diminui com relação àquele obtido no Item 3.4.2.2, passando de 0,72
para 0,66. Esta pequena redução no fator R, observada no conjunto de dados
analisados nesta dissertação, não significa que as correções para eficiência do martelo
e para impedância da estaca não sejam válidas − e não devam ser exploradas com
mais dados no futuro −.
3.4.3 Correlações Considerando o Atrito Lateral da Estaca
Outra diferença que deve ser considerada na comparação entre o ensaio SPT e a
cravação de uma estaca é que o número de golpes para a cravação da estaca está
influenciado pelo atrito lateral ao longo de seu fuste. O número de golpes para a
cravação da estaca pode ser separado em 2 parcelas, da seguinte forma:
, ,estaca estaca l estaca pN N N= + (3.11)

66
onde Nestaca,l representa a parcela referente à resistência por atrito lateral e Nestaca,p a
parcela devida à resistência de ponta da estaca.
Sabe-se que para uma camada de solo homogênea, ou seja, com NSPT constante, a
parcela lateral da capacidade de carga de uma estaca pode ser escrita da seguinte
forma:
SPTlult NLUKQ ⋅⋅⋅= 1, (3.12)
com 1 2K k Fα= ⋅ , onde k⋅α variam com o tipo de solo e 75,12 =F para estacas pré-
moldadas de concreto, ambos definidos por AOKI e VELLOSO (1975).
Não é difícil verificar que a parcela lateral do Nestaca guarda uma relação direta com a
capacidade de carga lateral da estaca. Ambos se desenvolvem em função do atrito
mobilizado ao longo do fuste da estaca.
SPTlult NK ⋅= 1,τ (3.13)
onde lult,τ é o atrito lateral mobilizado ao longo do fuste da estaca cravada.
Para efeito de simplificação para a determinação da parcela lateral da Nestaca, de
acordo com o proposto por DÉCOURT e QUARESMA (1978), não vamos considerar
a variação dos fatores k⋅α de AOKI e VELLOSO (1975).
A partir destas considerações e, ainda, padronizando uma estaca, ou seja, o diâmetro
deixa de ser uma variável, pode-se dizer que a parcela lateral do Nestaca é função
apenas do comprimento L da estaca e do NSPT, ou seja:
( )SPTlestaca NLfN ,, = (3.14)
ou ainda
( )SPTlestaca NLN ⋅⋅= ϕ, (3.15)
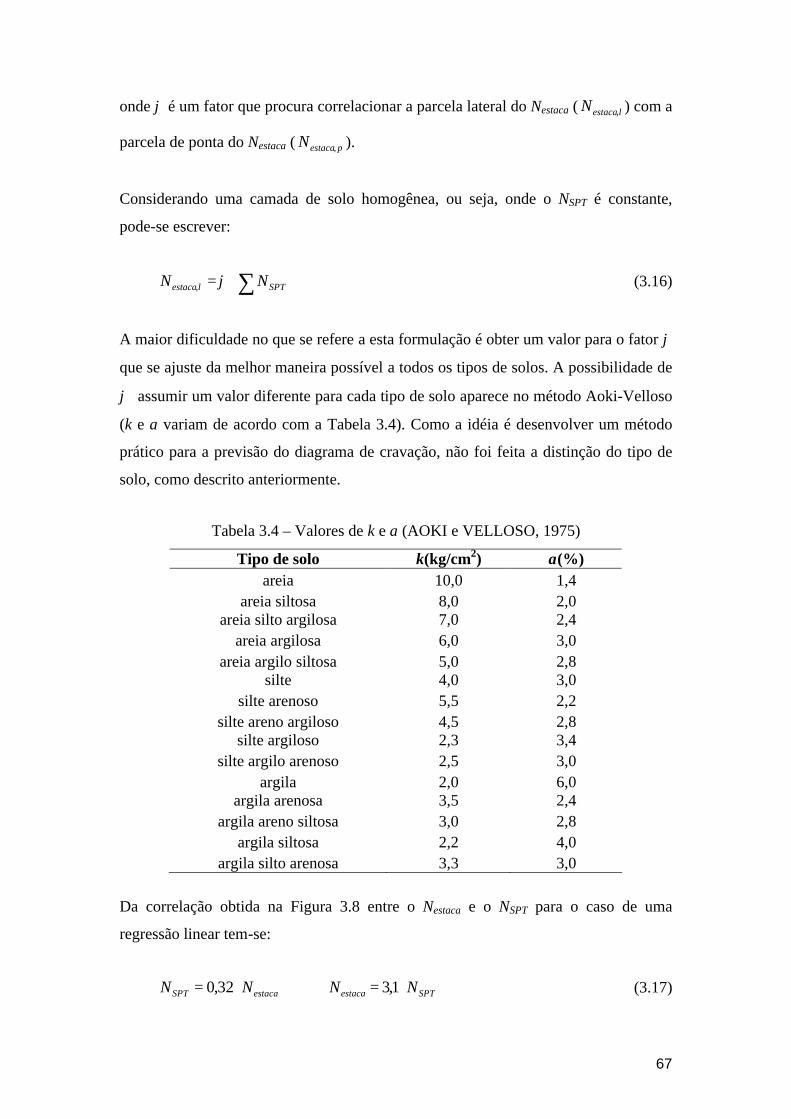
67
onde ϕ é um fator que procura correlacionar a parcela lateral do Nestaca ( lestacaN , ) com a
parcela de ponta do Nestaca ( pestacaN , ).
Considerando uma camada de solo homogênea, ou seja, onde o NSPT é constante,
pode-se escrever:
∑⋅= SPTlestaca NN ϕ, (3.16)
A maior dificuldade no que se refere a esta formulação é obter um valor para o fator ϕ
que se ajuste da melhor maneira possível a todos os tipos de solos. A possibilidade de
ϕ assumir um valor diferente para cada tipo de solo aparece no método Aoki-Velloso
(k e a variam de acordo com a Tabela 3.4). Como a idéia é desenvolver um método
prático para a previsão do diagrama de cravação, não foi feita a distinção do tipo de
solo, como descrito anteriormente.
Tabela 3.4 – Valores de k e a (AOKI e VELLOSO, 1975)
Tipo de solo k(kg/cm2) a(%) areia 10,0 1,4
areia siltosa 8,0 2,0 areia silto argilosa 7,0 2,4
areia argilosa 6,0 3,0 areia argilo siltosa 5,0 2,8
silte 4,0 3,0 silte arenoso 5,5 2,2
silte areno argiloso 4,5 2,8 silte argiloso 2,3 3,4
silte argilo arenoso 2,5 3,0 argila 2,0 6,0
argila arenosa 3,5 2,4 argila areno siltosa 3,0 2,8
argila siltosa 2,2 4,0 argila silto arenosa 3,3 3,0
Da correlação obtida na Figura 3.8 entre o Nestaca e o NSPT para o caso de uma
regressão linear tem-se:
estacaSPT NN ⋅= 32,0 ∴ SPTestaca NN ⋅= 1,3 (3.17)

68
Assim, para o primeiro metro de estaca cravado pode-se definir a parcela devido à
resistência de ponta da estaca da seguinte maneira:
SPTSPTpestaca NNN ⋅−⋅= ϕ1,3, (3.18)
Para a avaliação do valor de ϕ foi feita uma análise inversa dos diagramas de cravação
das estacas com base nas Equações 3.16 e 3.18. Atribuiu-se valores a ϕ e, a partir dos
perfis de resistência dos solos obteve-se um diagrama de cravação previsto para cada
estaca. Estes diagramas previstos foram comparados com aqueles de suas respectivas
estacas, medidos no campo. Através destas comparações observou-se que um valor de
ϕ igual a 0,2 era o que melhor se ajustava.
Com 2,0=ϕ pode-se reescrever as Equações 3.16 e 3.18 da seguinte forma:
∑⋅= SPTlestaca NN 2,0, (3.19)
SPTSPTpestaca NNN ⋅−⋅= 2,01,3, ∴ SPTpestaca NN ⋅= 9,2, (3.20)
Ou seja, a parcela do Nestaca devido à resistência de ponta é função apenas do valor do
SPT na ponta da estaca, como é de se esperar.
Assim, a partir da Equação 3.11, pode-se prever um diagrama de cravação com:
∑ ⋅+⋅= SPTSPTprevistoestaca NNN 9.22,0, (3.21)
Esta equação transforma o perfil da sondagem SPT em um diagrama de cravação
padrão previsto, ou seja, um diagrama da estaca padrão cravada com uma energia de
30kNm (energia padrão).

69
3.5 O DIAGRAMA DE CRAVAÇÃO COMO VERIFICADOR DO PERFIL
DO SUBSOLO
De posse das correlações do item anterior, pode-se pensar no uso do diagrama de
cravação para verificação do perfil do subsolo. O número de golpes para a cravação
de uma estaca guarda uma relação direta com a resistência do solo no qual esta estaca
está sendo cravada. Esta relação é composta de 2 parcelas (Figura 3.9): a ação direta
da ponta e o atrito do fuste com o solo (daí a capacidade de carga de ponta e lateral da
estaca).
0123456789
1011121314151617181920
0 20 40 60 80 100
Nestaca
Pro
fund
idad
e (m
)
0123456789
1011121314151617181920
0 10 20 30 40 50
NSPT
Pro
fund
idad
e (m
)
0123456789
1011121314151617181920
0 20 40 60 80
Capacidade de carga (tf)
Pro
fund
idad
e (m
)
QfusteQpontaQtotal
Figura 3.12 – Comparação do diagrama de cravação com a capacidade de
carga de ponta e fuste da estaca
Quando uma estaca inicia sua penetração em uma camada de solo homogênea, a
tendência é que o número de golpes cresça linearmente com a profundidade devido ao
acréscimo do atrito lateral, já que a parcela referente à ponta não sofre acréscimos
nestas condições. Quando a estaca atinge uma camada de solo mais resistente, a
parcela da ponta sofre um aumento repentino, refletindo-se diretamente no número de
golpes. A Figura 3.2, como citado, é um caso real de obra e ilustra bem este aspecto.
Outro aspecto importante é quando a estaca sai de uma camada de solo resistente para
uma camada de solo mole. O efeito do atrito lateral na camada resistente pode ser
70
suficiente para que não se consiga detectar, através do diagrama de cravação, a
camada de solo mole. Portanto, para que se consiga avaliar perfeitamente o perfil de
um subsolo a partir de um diagrama de cravação é necessário que se conheça a parcela
Nestaca,l referente à resistência por atrito lateral.
A seguir é apresentado um exercício de aplicação da Equação 3.21 para as 3 obras que
compõem o banco de dados desta dissertação. Nas Figuras 3.13, 3.14, 3.15 e 3.16 os
diagramas de cravação de várias estacas são comparados com aquele previsto através
da Equação 3.21. Embora os dados por trás desta equação provenham de estacas
atravessando argila mole e penetrando em solo residual de gnaisse, acredita-se que
esta correlação pode ser usada, numa primeira aproximação, em outros solos.
Uma avaliação da Equação 3.21 pode ser feita a partir destas comparações. Em todos
os casos o diagrama previsto situou-se dentro da faixa coberta pelos diagramas
medidos em campo, com uma exceção na Figura 3.15 (umas das sondagens da Vila
Panamericana) onde uma discrepância num trecho do diagrama de cravação previsto
pode ser observada. Esta discrepância pode se dever à sondagem em questão. De uma
maneira geral o resultado da comparação se mostrou bastante positivo, o que
demonstra a validade da Equação 3.21 para solos com as mesmas características
destes onde foram cravadas as estacas que compõem o banco de dados desta
dissertação.

71
0,0
1,0
2,0
3,0
4,0
5,0
6,0
7,0
8,0
9,0
0 10 20 30 40 50
NSPT
Prof
undi
dade
(m)
SP05
0,0
1,0
2,0
3,0
4,0
5,0
6,0
7,0
8,0
9,0
0 50 100 150 200 250
Nestaca
Prof
undi
dade
(m
)
Previsto
P74-A
P52
Figura 3.13 – Comparação entre diagramas de cravação previsto e medido
(furo de sondagem SP05 – Laboratório de Metalúrgica)

72
0,01,02,03,04,05,06,07,08,09,0
10,011,012,013,014,015,016,017,018,019,020,021,022,023,024,025,026,027,028,029,030,0
0 10 20 30 40 50
NSPT
Pro
fund
idad
e (m
)
SP102
0,01,02,03,04,05,06,07,08,09,0
10,011,012,013,014,015,016,017,018,019,020,021,022,023,024,025,026,027,028,029,030,0
0 25 50 75 100 125 150
Nestaca
Pro
fund
idad
e (m
)
PrevistoP102-10P102-18P102-5P102-3P102-8P102-12
Figura 3.14 – Comparação entre diagramas de cravação previsto e medido
(furo de sondagem SP102 – Vila Panamericana)

73
0,01,02,03,04,05,06,07,08,09,0
10,011,012,013,014,015,016,017,018,019,020,021,022,023,024,025,026,027,028,029,030,0
0 10 20 30 40 50
NSPT
Pro
fund
idad
e (m
)
SP108
0,01,02,03,04,05,06,07,08,09,0
10,011,012,013,014,015,016,017,018,019,020,021,022,023,024,025,026,027,028,029,030,0
0 20 40 60 80 100 120 140
Nestaca
Pro
fund
idad
e (m
)
PrevistoP108-4P108-8P108-6P108-12P10811P1083
Figura 3.15 – Comparação entre diagramas de cravação previsto e medido
(furo de sondagem SP108 – Vila Panamericana)
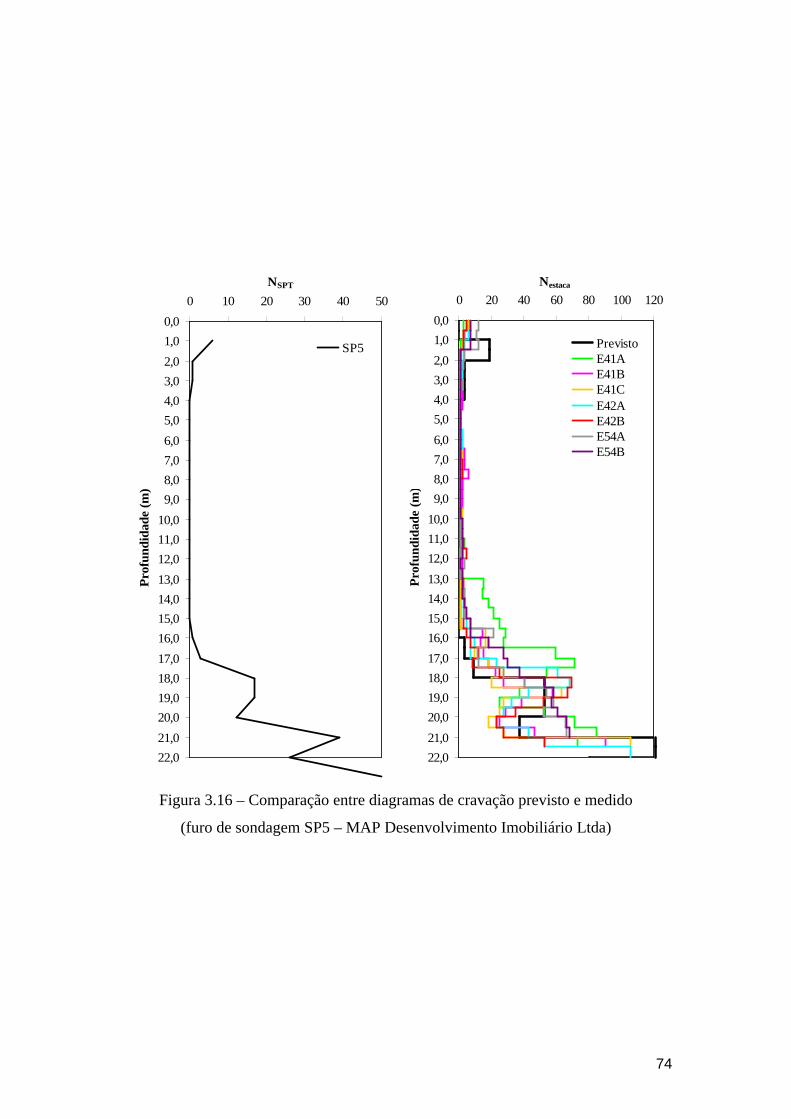
74
0,0
1,0
2,0
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10,0
11,0
12,0
13,0
14,0
15,0
16,0
17,0
18,0
19,0
20,0
21,0
22,0
0 10 20 30 40 50NSPT
Pro
fund
idad
e (m
)
SP5
0,0
1,0
2,0
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10,0
11,0
12,0
13,0
14,0
15,0
16,0
17,0
18,0
19,0
20,0
21,0
22,0
0 20 40 60 80 100 120Nestaca
Pro
fund
idad
e (m
)
PrevistoE41AE41BE41CE42AE42BE54AE54B
Figura 3.16 – Comparação entre diagramas de cravação previsto e medido
(furo de sondagem SP5 – MAP Desenvolvimento Imobiliário Ltda)

75
CAPÍTULO 4
UMA AVALIAÇÃO DA CONFIABILIDADE DE FÓRMULAS
DINÂMICAS
4.1 UMA REVISÃO DE AVALIAÇÕES ANTERIORES
As fórmulas dinâmicas utilizam as leis que governam o comportamento de corpos que
se chocam; basicamente enfocam a conservação de energia e, algumas delas,
incorporam as leis de choque de Newton para a estimativa das perdas de energia
(VELLOSO e LOPES, 2002). Contudo, há de se considerar que a cravação de uma
estaca não é tão simples assim. A estaca não é um corpo livre, estando ainda inserida
no solo com o qual reage intimamente quando recebe um golpe do martelo
(ARAÚJO, 1988).
Segundo ALONSO (1988), outras críticas relevantes podem ser consideradas quanto
ao uso destas fórmulas:
• existem fatores pouco conhecidos envolvidos no fenômeno, tais como a energia
real aplicada à estaca (que é estimada como uma percentagem do peso do martelo
vezes a altura de queda) e a influência do coxim e do cepo instalados no capacete
• a resistência pode aumentar com o tempo (“recuperação” do solo) ou diminuir
(“relaxação” do solo)
• a resistência mobilizada pelos golpes do martelo nem sempre é suficiente para
despertar a resistência máxima que o solo pode oferecer
• os efeitos decorrentes do amolgamento, compactação e adensamento do solo não
podem ser avaliados com um só teste, pois dependem do tempo
Não obstante estas deficiências teóricas, as fórmulas dinâmicas de cravação
constituem o modo usual de controle de estaqueamentos, e são um fator decisivo na
determinação – ou confirmação – do comprimento de estacas cravadas.
76
Na literatura técnica são apresentadas algumas revisões dessas fórmulas dinâmicas,
baseadas em comparações de resultados de provas de carga estáticas com previsões
pelas diferentes fórmulas.
SORENSEN e HANSEN (1957) usaram um banco de dados de 78 provas de carga
para avaliar as Fórmulas de Hiley, Holandeses, Janbu, Dinamarqueses e também uma
integração numérica da equação da onda. AGERSCHOU (1962) comparou 171
provas de carga com as Fórmulas da Engineering News Record, Weisbach e
Dinamarqueses. Os resultados foram apresentados em gráficos de probabilidade,
utilizando-se uma distribuição normal com abscissas log µ – µ é a relação entre os
resultados das provas de carga estáticas e fórmulas dinâmicas – e ordenadas a
freqüência com que estes valores ocorriam. A análise dos resultados mostrou que as
Fórmulas dos Holandeses e Engineering News apresentavam valores com dispersão
muito grande, portanto, pouco confiáveis. As Fórmulas de Hiley, Janbu e
Dinamarqueses apresentaram valores próximos e bastante confiáveis, enquanto que a
Fórmula de Weisbach apresentou-se um pouco menos confiável.
De acordo com CHELLIS (1961), a Fórmula de Hiley subestima a capacidade de
carga de estacas pesadas e longas, quando comparadas com resultados de provas de
carga. Estacas longas ou pesadas apresentam resultados bastante compatíveis, mas o
mesmo não acontece para a combinação longo-pesada. Segundo CHELLIS (1961) isto
acontece provavelmente porque quando uma estaca pesada e longa recebe um golpe
do martelo, a onda de impacto descendente colide com a onda refletida (ascendente)
do golpe anterior. CHELLIS (1961) afirma ainda que isto pode ser verificado através
de análises da Equação da Onda.
Segundo WHITAKER (1970), em 1942 Terzaghi comparou resultados de provas de
carga estáticas em estacas de madeira, concreto e aço com aqueles obtidos através de
7 fórmulas dinâmicas. Ele encontrou um fator µ que corresponde à relação entre os
resultados das provas de carga e os valores calculados pelas fórmulas. Os valores de µ
assim obtidos variavam entre 0,25 a 4,00 para diferentes fórmulas aplicadas aos
mesmos dados, e que algumas fórmulas não eram necessariamente “boas”
simultaneamente para estacas de madeira, concreto e aço.

77
O código inglês CODE OF PRACTICE FOR FOUNDATIONS (1972) diz que em
solos granulares o valor aproximado da capacidade de carga de uma estaca pode ser
determinado através de uma fórmula dinâmica. As fórmulas dinâmicas não são
diretamente aplicáveis à depósitos de solos moles; elas devem ser usadas com
precaução em qualquer solo, principalmente naqueles onde há o fenômeno de
relaxação após a cravação das estacas. Se o uso dessas fórmulas for restringido às
estacas com a ponta apoiada em pedregulhos, areias e outros solos granulares, então a
fórmula mais segura deveria dar um resultado dentro da faixa de 40% a 130% da
capacidade de carga última obtida através de uma prova de carga estática. Análises
estatísticas mostram que não há nenhuma fórmula completamente segura. Com o
resultado de uma prova de carga em um determinado local, um fator de correção pode
ser aplicado a uma fórmula escolhida, de tal forma que os resultados da fórmula
deveriam ter então confiança razoável para este local.
O código inglês CODE OF PRACTICE FOR FOUNDATIONS (1972) diz ainda que
a Fórmula de Hiley é uma das mais seguras e provavelmente a mais utilizada na
Inglaterra; no entanto, segundo BOWLES (1968), esta fórmula é a mais usada não por
apresentar valores mais confiáveis e sim por ser uma fórmula bastante simples.
Na revisão feita por POULOS e DAVIS (1980), por exemplo, a Fórmula da
Engineering News Record é considerada pouco confiável, pois foram encontrados
fatores de correção F numa ampla faixa, enquanto as Fórmulas de Janbu e dos
Dinamarqueses apresentam valores de F com menor dispersão e bastante próximos de
2. VELLOSO e LOPES (2002) têm uma boa experiência com a Fórmula dos
Dinamarqueses para estacas metálicas e pré-moldadas de concreto.
A Tabela 4.1, obtida de POULOS e DAVIS (1980), apresenta os resultados das
análises estatísticas destes diversos autores.
DANZIGER e FERREIRA (2000) apresentam uma comparação entre resultados de
capacidade de carga dinâmica obtida pela Fórmula dos Dinamarqueses e equação da
onda para estacas de aço. Só foram incluídas as estacas cujos comprimentos eram
inferiores à profundidade da sondagem SPT e também a uma distância máxima de 5

78
m da mesma. Foi encontrada a seguinte correlação entre a resistência dinâmica
avaliada pela Equação da Onda e a Fórmula dos Dinamarqueses:
( ) ( )ses Dinamarque03,1Dinexp SRDSRD ⋅=
onde SRD é a sigla de Soil Resistance during Driving (Resistência do Solo durante a
Cravação) e Dinexp é o programa utilizado para a determinação da capacidade de
carga das estacas durante a cravação pela Equação da Onda.
Os autores asseguram a confiança da Fórmula dos Dinamarqueses para estacas de aço
com características similares àquelas do banco de dados.
Tabela 4.1 – Resumo das análises estatísticas (POULOS E DAVIS, 1980)
4.2 COMPARAÇÃO DA FÓRMULA DOS DINAMARQUESES COM
PROVAS DE CARGA DINÂMICAS
A avaliação da capacidade de carga através da Fórmula dos Dinamarqueses depende
exclusivamente de 5 fatores: a energia líquida de cravação da estaca ( W hη ⋅ ⋅ ); a nega
79
tirada ao final da cravação da estaca (s); o comprimento (L), a área da seção da estaca
(A) e o módulo de elasticidade (Ep):
p
d
EALhWs
hWR
⋅⋅⋅⋅⋅
+
⋅⋅=
ηη2
21
(4.1)
A segunda parcela do denominador corresponde ao encurtamento elástico da estaca. O
fator de eficiência η usado na aplicação desta fórmula a seguir é 0,70, valor sugerido
pelos autores da fórmula para o caso de martelos de queda livre.
A nega e a seção da estaca têm suas influências sobre a capacidade de carga bastante
óbvias. Quanto maior a resistência do solo à cravação da estaca menor será a nega, o
que caracteriza uma maior capacidade de carga do elemento de fundação. Por outro
lado, um aumento na seção da estaca implica em um maior esforço para a penetração
desta no solo, voltando ao caso anterior.
A Figura 4.1 mostra como a capacidade de carga de uma estaca, tomada como a
estaca padrão (área da seção igual a 895 cm2) e nega igual a 0, varia em função do
comprimento e da energia líquida de cravação. No entanto, o efeito da variação do
comprimento da estaca no valor da capacidade de carga é muito intenso.
Ainda na Figura 4.1 observa-se que para estacas muito curtas a capacidade de carga
avaliada pela Fórmula dos Dinamarqueses é elevada e, ainda, fazendo este
comprimento tender a 0 ter-se-ia uma capacidade de carga tendendo ao infinito. Por
outro lado, fazendo o comprimento tender ao infinito, obter-se-ia uma capacidade de
carga tendendo a 0. Na verdade só esta interpretação não pode ser considerada como
válida, pois ela não leva em consideração os aspectos do solo. Geralmente, à medida
que se avança a cravação de uma estaca, a resistência à penetração cresce, ou seja, a
nega diminui à medida que a capacidade de carga da estaca cresce, conforme a Figura
4.2.

80
0
5
10
15
20
25
30
35
40
0 2500 5000 7500 10000 12500 15000 17500
Qult.fdin (kN)Fórmula dos Dinamarqueses
Com
prim
ento
(m)
20 kNm
30 kNm
40 kNm
Figura 4.1 – Avaliação da variação da capacidade de carga pela Fórmula dos
Dinamarqueses em função da variação do comprimento da estaca, para nega nula
A Figura 4.2 mostra a variação da capacidade de carga de estacas (com área da seção
transversal igual a 895 cm2) de diversos comprimentos submetidas a uma energia de
cravação de 30 kNm, quando se faz a nega variar em um intervalo de 0 a 40 mm/10
golpes.
Observa-se que para estacas mais curtas a variação da nega tem grande influência na
previsão da capacidade de carga das estacas. À medida que o comprimento das
estacas cresce esta influência diminui, e para comprimentos acima de 20 m esta
influência se torna bastante pequena.
A solução para a Fórmula dos Dinamarqueses deverá ser então a combinação das
soluções para os dois casos (Figuras 4.1 e 4.2).
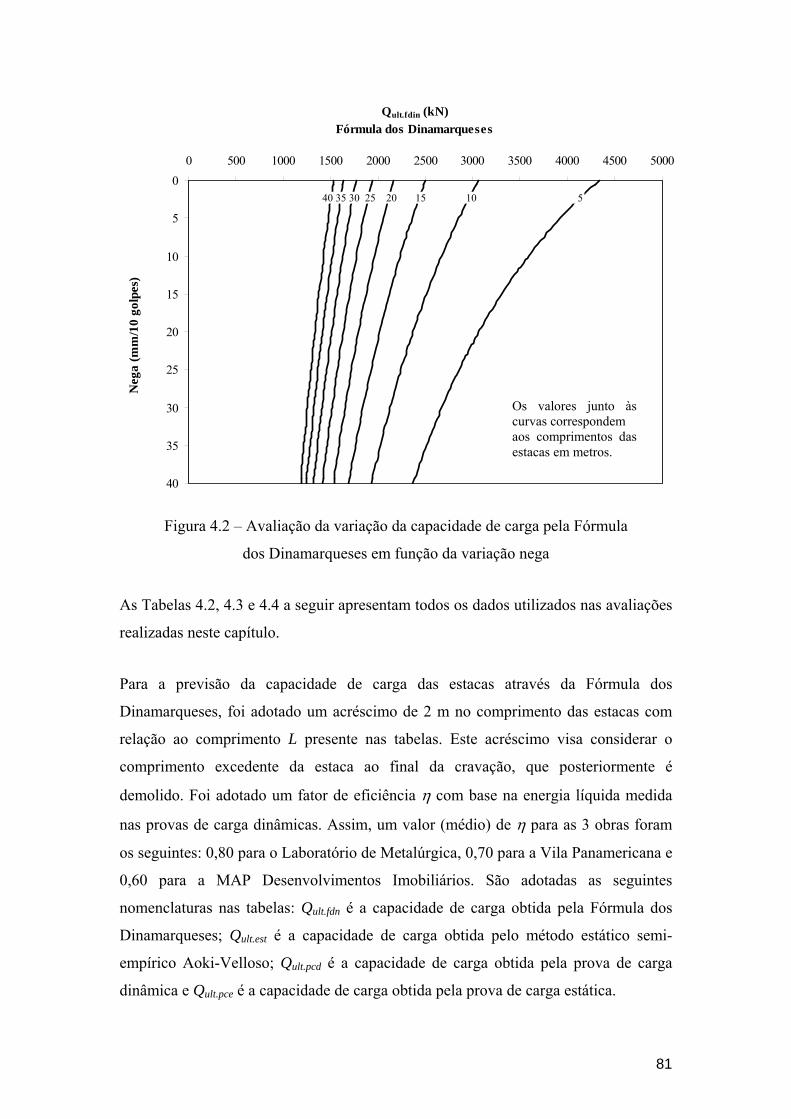
81
0
5
10
15
20
25
30
35
40
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
Qult.fdin (kN)Fórmula dos Dinamarqueses
Neg
a (m
m/1
0 go
lpes
)
Figura 4.2 – Avaliação da variação da capacidade de carga pela Fórmula
dos Dinamarqueses em função da variação nega
As Tabelas 4.2, 4.3 e 4.4 a seguir apresentam todos os dados utilizados nas avaliações
realizadas neste capítulo.
Para a previsão da capacidade de carga das estacas através da Fórmula dos
Dinamarqueses, foi adotado um acréscimo de 2 m no comprimento das estacas com
relação ao comprimento L presente nas tabelas. Este acréscimo visa considerar o
comprimento excedente da estaca ao final da cravação, que posteriormente é
demolido. Foi adotado um fator de eficiência η com base na energia líquida medida
nas provas de carga dinâmicas. Assim, um valor (médio) de η para as 3 obras foram
os seguintes: 0,80 para o Laboratório de Metalúrgica, 0,70 para a Vila Panamericana e
0,60 para a MAP Desenvolvimentos Imobiliários. São adotadas as seguintes
nomenclaturas nas tabelas: Qult.fdn é a capacidade de carga obtida pela Fórmula dos
Dinamarqueses; Qult.est é a capacidade de carga obtida pelo método estático semi-
empírico Aoki-Velloso; Qult.pcd é a capacidade de carga obtida pela prova de carga
dinâmica e Qult.pce é a capacidade de carga obtida pela prova de carga estática.
40 35 30 25 20 15 10 5
Os valores junto às curvas correspondem aos comprimentos das estacas em metros.
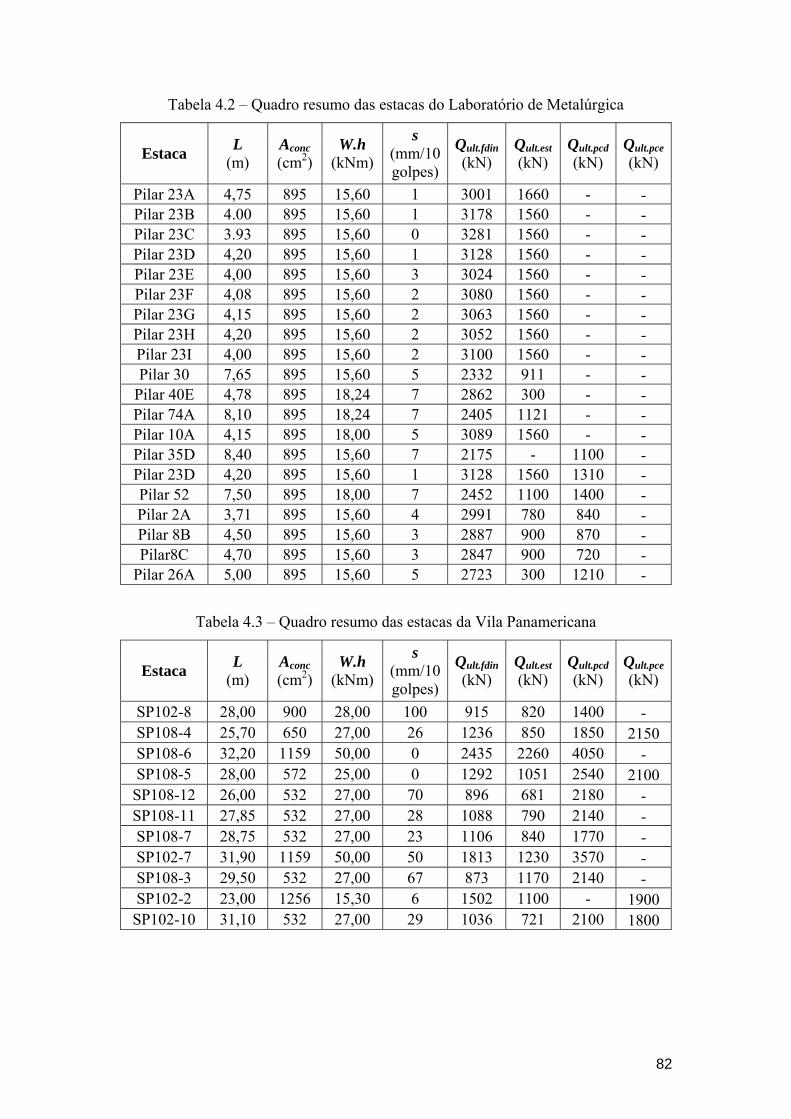
82
Tabela 4.2 – Quadro resumo das estacas do Laboratório de Metalúrgica
Estaca L (m)
Aconc (cm2)
W.h (kNm)
s (mm/10 golpes)
Qult.fdin (kN)
Qult.est (kN)
Qult.pcd (kN)
Qult.pce (kN)
Pilar 23A 4,75 895 15,60 1 3001 1660 - - Pilar 23B 4.00 895 15,60 1 3178 1560 - - Pilar 23C 3.93 895 15,60 0 3281 1560 - - Pilar 23D 4,20 895 15,60 1 3128 1560 - - Pilar 23E 4,00 895 15,60 3 3024 1560 - - Pilar 23F 4,08 895 15,60 2 3080 1560 - - Pilar 23G 4,15 895 15,60 2 3063 1560 - - Pilar 23H 4,20 895 15,60 2 3052 1560 - - Pilar 23I 4,00 895 15,60 2 3100 1560 - - Pilar 30 7,65 895 15,60 5 2332 911 - -
Pilar 40E 4,78 895 18,24 7 2862 300 - - Pilar 74A 8,10 895 18,24 7 2405 1121 - - Pilar 10A 4,15 895 18,00 5 3089 1560 - - Pilar 35D 8,40 895 15,60 7 2175 - 1100 - Pilar 23D 4,20 895 15,60 1 3128 1560 1310 - Pilar 52 7,50 895 18,00 7 2452 1100 1400 - Pilar 2A 3,71 895 15,60 4 2991 780 840 - Pilar 8B 4,50 895 15,60 3 2887 900 870 - Pilar8C 4,70 895 15,60 3 2847 900 720 -
Pilar 26A 5,00 895 15,60 5 2723 300 1210 -
Tabela 4.3 – Quadro resumo das estacas da Vila Panamericana
Estaca L (m)
Aconc (cm2)
W.h (kNm)
s (mm/10 golpes)
Qult.fdin (kN)
Qult.est (kN)
Qult.pcd (kN)
Qult.pce (kN)
SP102-8 28,00 900 28,00 100 915 820 1400 - SP108-4 25,70 650 27,00 26 1236 850 1850 2150 SP108-6 32,20 1159 50,00 0 2435 2260 4050 - SP108-5 28,00 572 25,00 0 1292 1051 2540 2100 SP108-12 26,00 532 27,00 70 896 681 2180 - SP108-11 27,85 532 27,00 28 1088 790 2140 - SP108-7 28,75 532 27,00 23 1106 840 1770 - SP102-7 31,90 1159 50,00 50 1813 1230 3570 - SP108-3 29,50 532 27,00 67 873 1170 2140 - SP102-2 23,00 1256 15,30 6 1502 1100 - 1900 SP102-10 31,10 532 27,00 29 1036 721 2100 1800
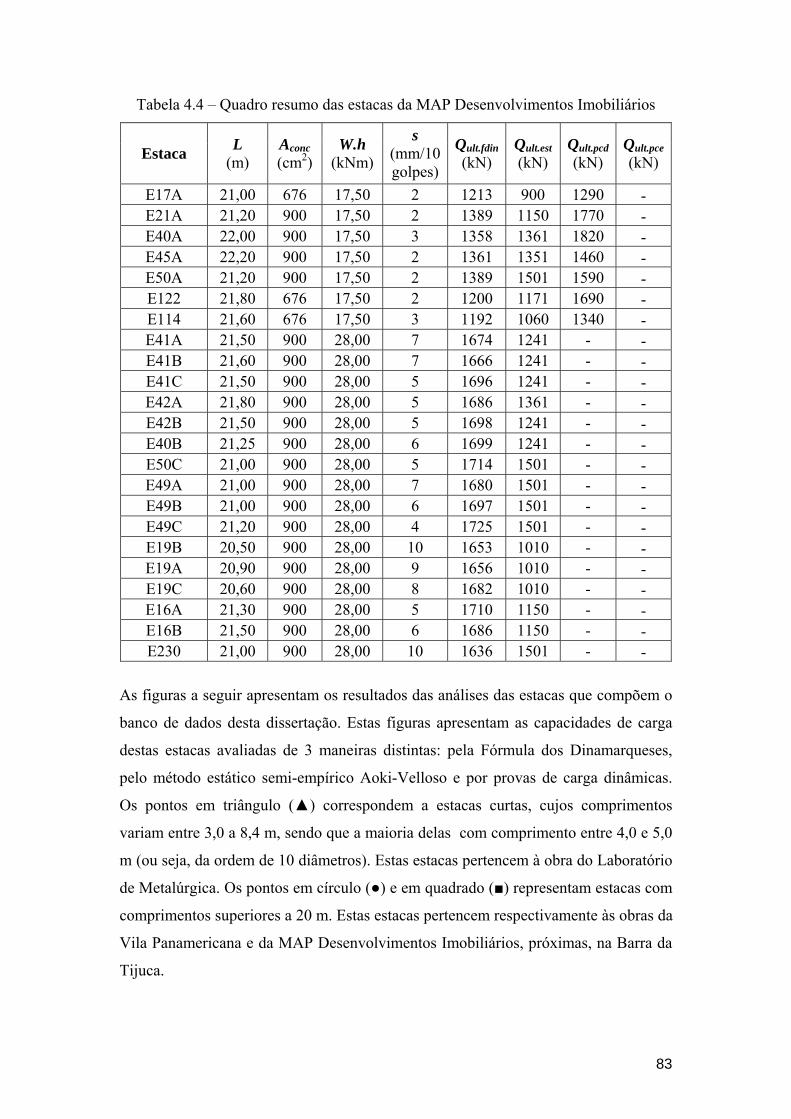
83
Tabela 4.4 – Quadro resumo das estacas da MAP Desenvolvimentos Imobiliários
Estaca L (m)
Aconc (cm2)
W.h (kNm)
s (mm/10 golpes)
Qult.fdin (kN)
Qult.est (kN)
Qult.pcd (kN)
Qult.pce (kN)
E17A 21,00 676 17,50 2 1213 900 1290 - E21A 21,20 900 17,50 2 1389 1150 1770 - E40A 22,00 900 17,50 3 1358 1361 1820 - E45A 22,20 900 17,50 2 1361 1351 1460 - E50A 21,20 900 17,50 2 1389 1501 1590 - E122 21,80 676 17,50 2 1200 1171 1690 - E114 21,60 676 17,50 3 1192 1060 1340 - E41A 21,50 900 28,00 7 1674 1241 - - E41B 21,60 900 28,00 7 1666 1241 - - E41C 21,50 900 28,00 5 1696 1241 - - E42A 21,80 900 28,00 5 1686 1361 - - E42B 21,50 900 28,00 5 1698 1241 - - E40B 21,25 900 28,00 6 1699 1241 - - E50C 21,00 900 28,00 5 1714 1501 - - E49A 21,00 900 28,00 7 1680 1501 - - E49B 21,00 900 28,00 6 1697 1501 - - E49C 21,20 900 28,00 4 1725 1501 - - E19B 20,50 900 28,00 10 1653 1010 - - E19A 20,90 900 28,00 9 1656 1010 - - E19C 20,60 900 28,00 8 1682 1010 - - E16A 21,30 900 28,00 5 1710 1150 - - E16B 21,50 900 28,00 6 1686 1150 - - E230 21,00 900 28,00 10 1636 1501 - -
As figuras a seguir apresentam os resultados das análises das estacas que compõem o
banco de dados desta dissertação. Estas figuras apresentam as capacidades de carga
destas estacas avaliadas de 3 maneiras distintas: pela Fórmula dos Dinamarqueses,
pelo método estático semi-empírico Aoki-Velloso e por provas de carga dinâmicas.
Os pontos em triângulo (▲) correspondem a estacas curtas, cujos comprimentos
variam entre 3,0 a 8,4 m, sendo que a maioria delas com comprimento entre 4,0 e 5,0
m (ou seja, da ordem de 10 diâmetros). Estas estacas pertencem à obra do Laboratório
de Metalúrgica. Os pontos em círculo (●) e em quadrado (■) representam estacas com
comprimentos superiores a 20 m. Estas estacas pertencem respectivamente às obras da
Vila Panamericana e da MAP Desenvolvimentos Imobiliários, próximas, na Barra da
Tijuca.

84
Através destas figuras é possível comparar os resultados obtidos pela Fórmula dos
Dinamarqueses com resultados de provas de carga dinâmicas e o método de Aoki-
Velloso. O objetivo é avaliar um método menos acurado (fórmulas dinâmicas) por um
mais acurado, buscando tirar conclusões a respeito daquele método.
Pela Figura 4.3 vê-se claramente que para estacas mais curtas a Fórmula dos
Dinamarqueses apresentou valores muito superiores àqueles medidos nas provas de
carga dinâmicas. A relação entre estes valores para estas estacas variou entre 1,75 e
3,95. Para estacas longas, os valores obtidos pelas provas de carga dinâmicas
apresentaram-se superiores. O fato de as cargas máximas nas provas dinâmicas serem
superiores aos da Fórmula dos Dinamarqueses pode ser explicado pela recuperação
(“set-up”), comum nos terrenos argilosos, em virtude de as provas de carga dinâmicas
serem realizados aproximadamente uma semana depois da cravação das estacas.
0
500
1000
1500
2000
2500
3000
3500
0 500 1000 1500 2000 2500 3000 3500
Qult.pcd (kN)Prova de carga dinâmica
Qul
t.fdi
n (k
N)
Fórm
ula
dos
Din
amar
ques
es
Lab. Met. Vila do Pan MAP
Figura 4.3 – Comparação de resultados de provas de carga dinâmica com
a Fórmula dos Dinamarqueses

85
Na Figura 4.4 pode-se ver que nas estacas mais curtas as capacidades de carga
avaliadas pela Fórmula dos Dinamarqueses têm seus valores também muito superiores
àqueles previstos pelo método Aoki-Velloso. A relação entre estas capacidades de
carga para as estacas do banco de dados se situa num intervalo que varia de 1,81 a
3,83. Para as estacas longas existe uma proximidade grande destas capacidades de
carga, com uma relação de cargas variando entre 0,75 a 1,67. As estacas designadas
Pilar 40E e Pilar 26A não foram incluídas nesta avaliação, por apresentarem uma
capacidade de carga prevista por método estático da ordem de 300 kN, provavelmente
por valores de SPT que não representam bem a resistência do solo.
0
500
1000
1500
2000
2500
3000
3500
0 500 1000 1500 2000 2500 3000 3500
Qult.est (kN)Método estático semi-empírico (Aoki-Velloso)
Qul
t.fdi
n (k
N)
Fórm
ula
dos
Din
amar
ques
es
Lab. Met. Vila do Pan MAP
Figura 4.5 – Comparação de resultados do método estático semi-empírico
Aoki-Velloso com a Fórmula dos Dinamarqueses
A partir destes dois gráficos pode-se dizer que a Fórmula dos Dinamarqueses pode
superestimar – em muito – a capacidade de carga de estacas relativamente curtas (ver
Figuras 4.1 e 4.2). A Figura 4.5 mostra com mais detalhes a comparação entre as

86
capacidades de carga para as estacas mais curtas (Laboratório de Metalúrgica). Os
números que aparecem ao lado dos pontos nesta figura correspondem aos
comprimentos das estacas em metros. Nota-se que para as duas estacas com
comprimentos de 7,50 e 8,40 m (em torno de 20 vezes o diâmetro), há uma
proximidade maior entre as capacidades de carga previstas pelos dois métodos.
0
500
1000
1500
2000
2500
3000
3500
0 500 1000 1500 2000 2500 3000 3500
Qult.pcd (kN)Prova de carga dinâmica
Qul
t.fdi
n (k
N)
Fórm
ula
dos
Din
amar
ques
es
Lab. Met.
Figura 4.6 – Comparação de resultados de provas de carga dinâmica com
a Fórmula dos Dinamarqueses (Laboratório de Metalúrgica)
As Tabelas 4.2 e 4.3 e as Figuras 4.6 e 4.7 mostram como a relação entre as
capacidades de carga previstas pelas provas de carga dinâmicas e Fórmula dos
Dinamarqueses varia com a geometria das estacas. A Tabela 4.2 e a Figura 4.7 levam
em consideração a relação L/B, onde L é comprimento da estaca e B a dimensão da
seção transversal (diâmetro para estacas de seção circular e lado para estacas de seção
quadrada). A Tabela 4.3 e a Figura 4.8 mostram o mesmo conjunto de dados, com
4,20 m
7,50 m
5,00 m
8,40 m
3,71 m4,20 m4,70 m

87
exceção da relação L/Deq, onde Deq é o diâmetro equivalente de área para estacas de
seção não circular.
Observa-se na Tabela 4.2 que a relação entre as capacidades de carga para o
Laboratório de Metalúrgica varia entre 0,25 a 0,57 (estacas mais curtas), enquanto que
para a Vila Panamericana a relação ficou entre 1,50 a 2,45 (estacas mais longas). Para
a MAP Desenvolvimentos Imobiliários a relação permaneceu entre 1,06 e 1,41
(estacas longas, mas com comprimento inferior às da Vila Panamericana).
Tabela 4.2 – Avaliação da previsão da capacidade de carga pela Fórmula dos
Dinamarqueses em função da geometria das estacas (L/B)
Estaca L
(m) B
(m) L/B Qult.fdin (kN)
Qult.pcd (kN) Qult.pcd/Qult.fdin
Pilar 35D 8,40 0,42 20 2175 1100 0,51 Pilar 23D 4,20 0,42 10 3128 1310 0,42 Pilar 52 7,50 0,42 18 2452 1400 0,57 Pilar 2A 3,71 0,42 9 2991 840 0,28 Pilar 8B 4,50 0,42 11 2887 870 0,30 Pilar 8C 4,70 0,42 11 2847 720 0,25 M
etal
úrgi
ca
Pilar 26A 5,00 0,42 12 2723 1210 0,44 SP102-8 28,00 0,30 93 915 1400 1,53 SP108-4 25,70 0,26 101 1236 1850 1,50 SP108-6 32,20 0,50 64 2435 4050 1,66 SP108-5 28,00 0,33 85 1292 2540 1,97 SP108-12 26,00 0,26 100 896 2180 2,43 SP108-11 27,85 0,26 107 1088 2140 1,97 SP108-7 28,75 0,26 111 1106 1770 1,60 SP102-7 31,90 0,50 64 1813 3570 1,97 SP108-3 29,50 0,33 89 873 2140 2,45
Vila
do
Pan
SP102-10 31,10 0,33 94 1036 2100 2,03 E17A 21,00 0,26 81 1213 1290 1,06 E21A 21,20 0,30 71 1389 1770 1,27 E40A 22,00 0,30 73 1358 1820 1,34 E45A 22,20 0,30 74 1361 1460 1,07 E50A 21,20 0,30 71 1389 1590 1,14 E122 21,80 0,26 84 1200 1690 1,41
MA
P
E114 21,60 0,26 83 1192 1340 1,12
A Figura 4.7 mostra que para a relação L/Deq há pequenas variações na posição
relativa dos pontos em relação à Figura 4.8. Para as duas Figuras 4.7 e 4.8 foram
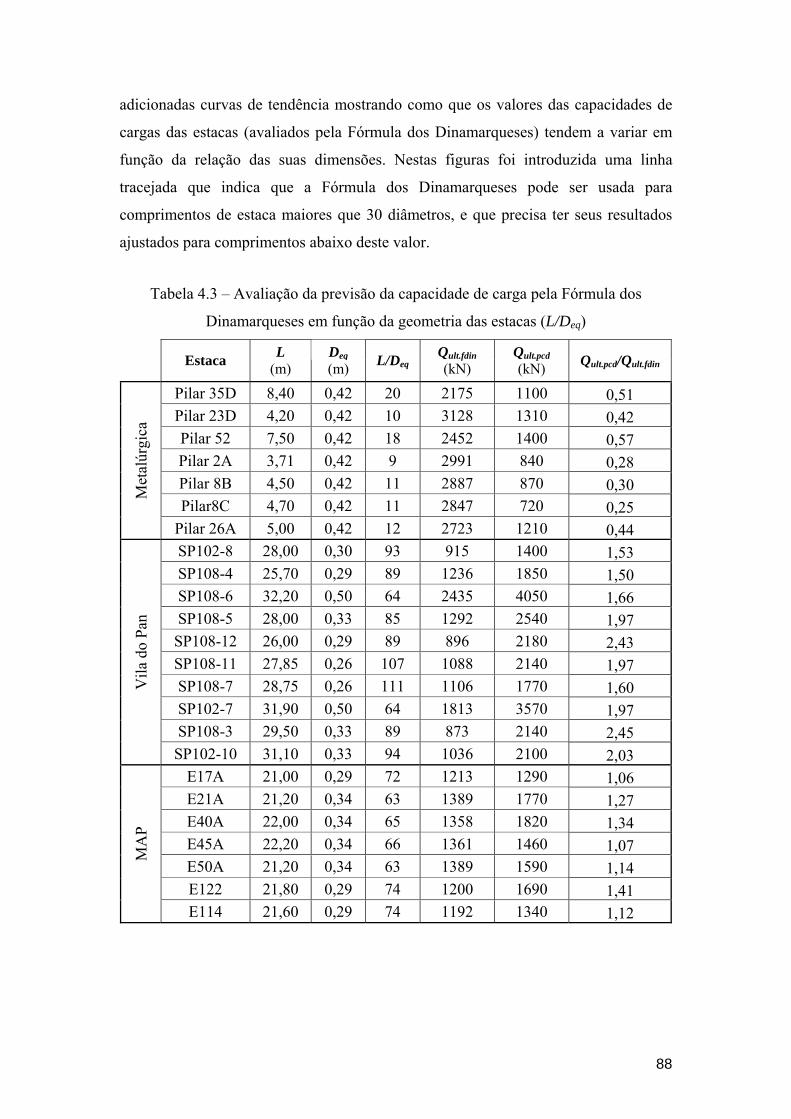
88
adicionadas curvas de tendência mostrando como que os valores das capacidades de
cargas das estacas (avaliados pela Fórmula dos Dinamarqueses) tendem a variar em
função da relação das suas dimensões. Nestas figuras foi introduzida uma linha
tracejada que indica que a Fórmula dos Dinamarqueses pode ser usada para
comprimentos de estaca maiores que 30 diâmetros, e que precisa ter seus resultados
ajustados para comprimentos abaixo deste valor.
Tabela 4.3 – Avaliação da previsão da capacidade de carga pela Fórmula dos
Dinamarqueses em função da geometria das estacas (L/Deq)
Estaca L
(m) Deq (m) L/Deq
Qult.fdin (kN)
Qult.pcd (kN) Qult.pcd/Qult.fdin
Pilar 35D 8,40 0,42 20 2175 1100 0,51 Pilar 23D 4,20 0,42 10 3128 1310 0,42 Pilar 52 7,50 0,42 18 2452 1400 0,57 Pilar 2A 3,71 0,42 9 2991 840 0,28 Pilar 8B 4,50 0,42 11 2887 870 0,30 Pilar8C 4,70 0,42 11 2847 720 0,25
Met
alúr
gica
Pilar 26A 5,00 0,42 12 2723 1210 0,44 SP102-8 28,00 0,30 93 915 1400 1,53 SP108-4 25,70 0,29 89 1236 1850 1,50 SP108-6 32,20 0,50 64 2435 4050 1,66 SP108-5 28,00 0,33 85 1292 2540 1,97 SP108-12 26,00 0,29 89 896 2180 2,43 SP108-11 27,85 0,26 107 1088 2140 1,97 SP108-7 28,75 0,26 111 1106 1770 1,60 SP102-7 31,90 0,50 64 1813 3570 1,97 SP108-3 29,50 0,33 89 873 2140 2,45
Vila
do
Pan
SP102-10 31,10 0,33 94 1036 2100 2,03 E17A 21,00 0,29 72 1213 1290 1,06 E21A 21,20 0,34 63 1389 1770 1,27 E40A 22,00 0,34 65 1358 1820 1,34 E45A 22,20 0,34 66 1361 1460 1,07 E50A 21,20 0,34 63 1389 1590 1,14 E122 21,80 0,29 74 1200 1690 1,41
MA
P
E114 21,60 0,29 74 1192 1340 1,12

89
0,00
0,50
1,00
1,50
2,00
2,50
3,00
0 10 20 30 40 50 60 70 80 90 100 110 120L/B
Qul
t.pcd
/Qul
t.fdi
nLab. Met.
Vila do Pan
MAP
Figura 4.7 – Avaliação da previsão da capacidade de carga pela Fórmula
dos Dinamarqueses em função da geometria das estacas (L/B)
0,00
0,50
1,00
1,50
2,00
2,50
3,00
0 10 20 30 40 50 60 70 80 90 100 110 120
L/Deq
Qul
t.pcd
/Qul
t.fdi
n
Lab. Met.Vila do PanMAP
Figura 4.8 – Avaliação da previsão da capacidade de carga pela Fórmula
dos Dinamarqueses em função da geometria das estacas (L/Deq)
Linha para efeito de projeto
Linha para efeito de projeto

90
4.3 ANÁLISE COMPARATIVA DOS MÉTODOS DINÂMICOS X
ESTÁTICOS
Na Figura 4.9 tem-se os resultados de 4 provas de carga estáticas comparados com
aqueles da Fórmula dos Dinamarqueses. Estas provas foram realizadas em estacas
longas, na Vila Panamericana, onde a Fórmula dos Dinamarqueses foi inferior às
provas de carga dinâmicas. As cargas de ruptura das provas de carga estáticas são
superiores àquelas obtidas pela Fórmula dos Dinamarqueses. Uma possível explicação
é a ocorrência de recuperação do solo (“set-up”).
0
500
1000
1500
2000
2500
3000
0 500 1000 1500 2000 2500 3000
Qult.pce (kN)Prova de carga estática
Qul
t.fdi
n (k
N)
Fórm
ula
dos
Din
amar
ques
es
Vila do Pan
Figura 4.9 – Comparação de resultados de provas de carga estáticas com a
Fórmula dos Dinamarqueses

91
A Figura 4.10 apresenta uma comparação entre capacidades de carga estática obtidas
em provas dinâmicas e em método estático semi-empírico (Aoki-Velloso).
Pode-se ver que os resultados das provas de carga dinâmicas na sua maioria
apresentaram valores superiores aos obtidos pelo método Aoki-Velloso, com uma
relação de cargas variando entre 0,80 a 4,83 (com exceção de uma estaca – Pilar 26A
– com uma capacidade de carga prevista por método estático da ordem de 300 kN,
provavelmente por valores de SPT que não representam bem a resistência do solo).
Observa-se também que para estacas mais curtas os valores das provas de carga
dinâmicas são próximos daqueles obtidos pelo método Aoki-Velloso. Para as estacas
mais longas os valores previstos pelas provas de carga dinâmicas mostraram-se
superiores.
0
500
1000
1500
2000
2500
3000
0 500 1000 1500 2000 2500 3000
Qult.est (kN)Método estático semi-empírico (Aoki-Velloso)
Qul
t.pcd
(kN
)Pr
ova
de c
arga
din
âmic
a
Lab. Met. Vila do Pan MAP
Figura 4.10 – Comparação de resultados do método estático semi-
empírico Aoki-Velloso com provas de carga dinâmicas
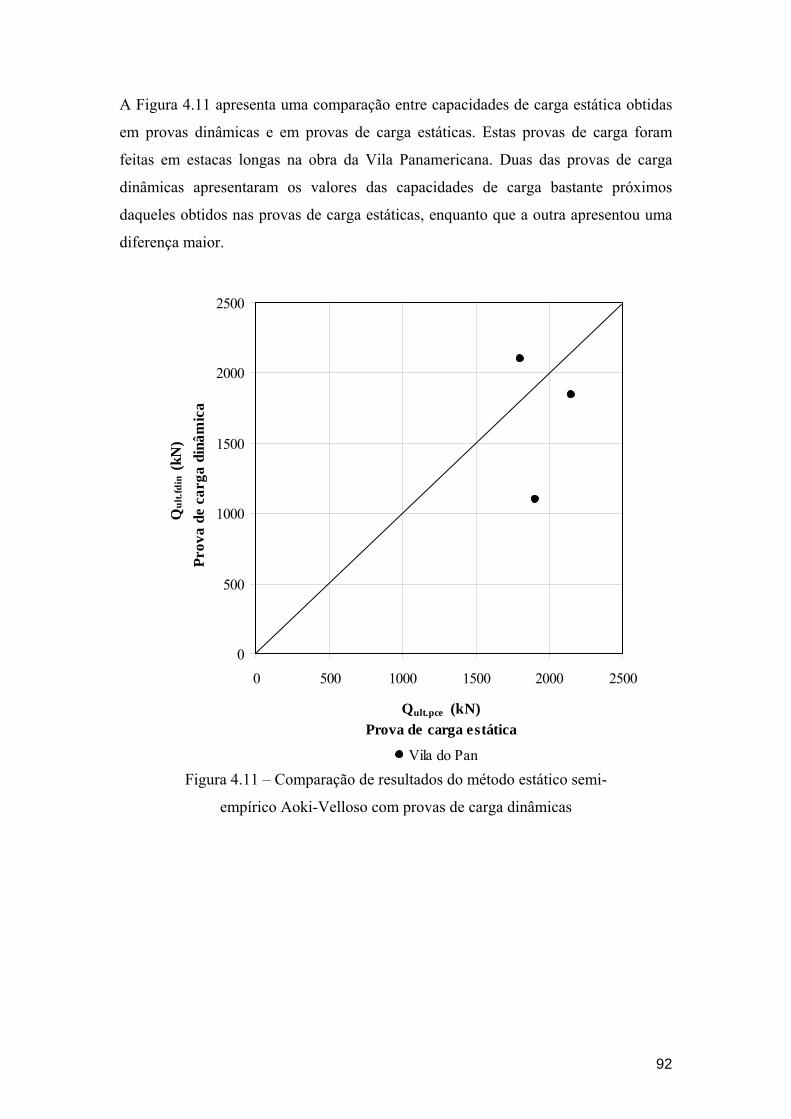
92
A Figura 4.11 apresenta uma comparação entre capacidades de carga estática obtidas
em provas dinâmicas e em provas de carga estáticas. Estas provas de carga foram
feitas em estacas longas na obra da Vila Panamericana. Duas das provas de carga
dinâmicas apresentaram os valores das capacidades de carga bastante próximos
daqueles obtidos nas provas de carga estáticas, enquanto que a outra apresentou uma
diferença maior.
0
500
1000
1500
2000
2500
0 500 1000 1500 2000 2500
Qult.pce (kN)Prova de carga estática
Qul
t.fdi
n (k
N)
Prov
a de
car
ga d
inâm
ica
Vila do PanFigura 4.11 – Comparação de resultados do método estático semi-
empírico Aoki-Velloso com provas de carga dinâmicas
93
CAPÍTULO 5
INTERPRETAÇÃO DE RESULTADOS DAS PROVAS DE CARGA
COM VISTAS A AVALIAR A SEGURANÇA DE FUNDAÇÕES
5.1 INTRODUÇÃO
Conforme dito no Capítulo 1, uma estrutura é considerada segura quando puder
suportar as ações que vierem a solicitá-la durante a sua vida útil, sem ser impedida,
quer permanente, quer temporariamente, de desempenhar as funções para as quais foi
concebida (ALONSO 1988). Segurança é um conceito qualitativo, então é necessário
selecionar métodos que permitam quantificá-la.
Os primeiros métodos para a análise da segurança de fundações baseavam-se em
critérios determinísticos, ou seja, a fixação das cargas e resistências dos materiais era
feita dentro de um consenso do meio especializado. Admitia-se que, em um mesmo
material, a aplicação de uma determinada solicitação, com uma lei de variação
definida no tempo, produziria os mesmos esforços internos, as mesmas deformações e
os mesmos deslocamentos, tantas vezes quantas fossem repetidas. Com a evolução do
conhecimento da Mecânica das Estruturas, constatou-se que esse procedimento não
correspondia à realidade e os critérios determinísticos não atendiam totalmente às
necessidades técnicas (ALONSO, 1988).
A partir daí começam-se a estudar critérios baseados na Teoria da Probabilidade. Para
tanto, tornava-se necessário conhecer as distribuições estatísticas de todas as variáveis
envolvidas. Na impossibilidade de tal fato, desenvolveram-se os métodos
semiprobabilísticos, que reúnem critérios determinísticos e probabilísticos no
tratamento destas variáveis (ALONSO, 1988).
A introdução do método semiprobabilístico para as estruturas de aço e concreto
praticamente consagrou a utilização de coeficientes de segurança parciais.
Atualmente, é difícil fugir a estas formulações, mesmo na Engenharia Geotécnica. A

94
norma brasileira NBR 6122 (1996) admite tanto a utilização de coeficientes de
segurança globais quanto parciais (HACHICH, 1988).
Segundo HACHICH (1988), a essência do método semiprobabilístico é transformar
valores característicos das grandezas em valores de projeto pela aplicação de
coeficientes de ponderação. O método semiprobabilístico introduz ainda um
coeficiente de ponderação, avaliado empiricamente, relacionado com as
conseqüências da ruína. A segurança é verificada se as solicitações de cálculo não
excederem as resistências limites de cálculo.
Desta maneira, os valores das solicitações são fixados deterministicamente pelas
normas técnicas de cada país. Ao contrário, os valores das resistências dos materiais
são obtidos a partir de estudos estatísticos baseados em resultados de ensaios em
corpos de prova. São as chamadas resistências características de cada material que
compõem a estrutura, onde se prevê que uma determinada percentagem deste material
apresente uma resistência inferior à característica. Considera-se aceitável, por
exemplo, a adoção de um quantil de 5% na curva de Gauss (Tabela 5.1), ou seja, que
95% do material em questão, provavelmente, apresenta resistência superior à
característica (ALONSO, 1988).
.
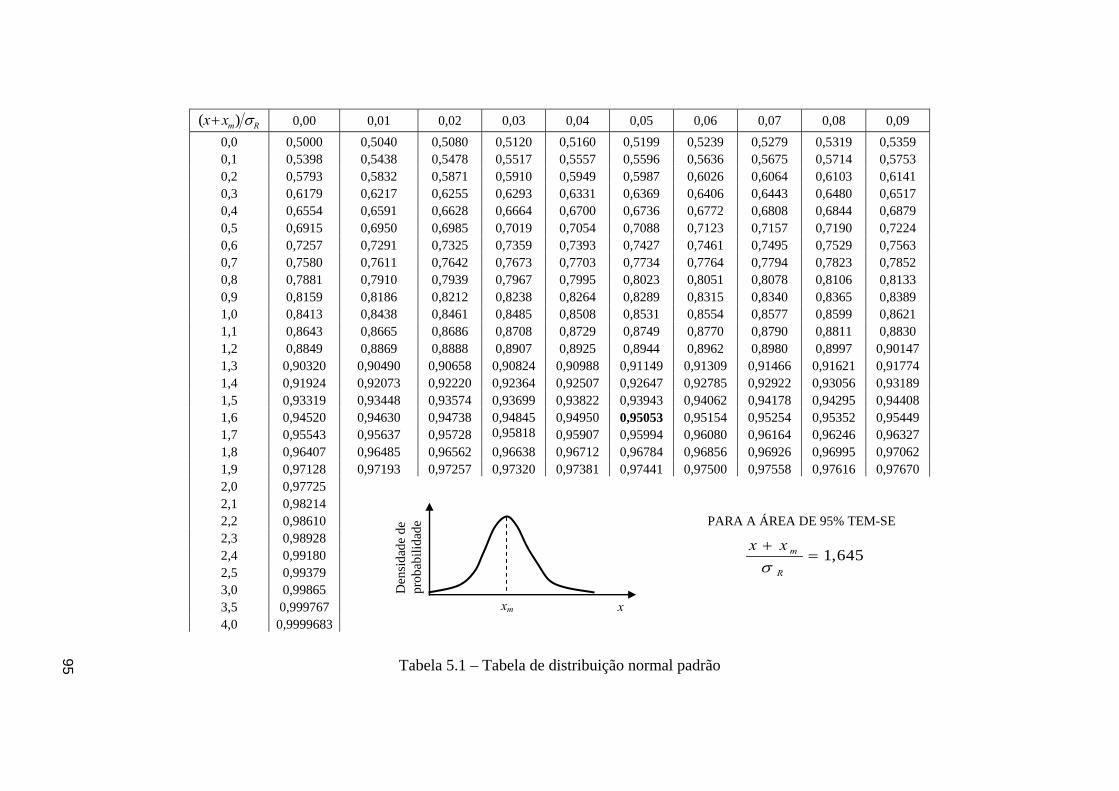
95
Rmxx σ)( + 0,00 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,0 0,5000 0,5040 0,5080 0,5120 0,5160 0,5199 0,5239 0,5279 0,5319 0,5359 0,1 0,5398 0,5438 0,5478 0,5517 0,5557 0,5596 0,5636 0,5675 0,5714 0,5753 0,2 0,5793 0,5832 0,5871 0,5910 0,5949 0,5987 0,6026 0,6064 0,6103 0,6141 0,3 0,6179 0,6217 0,6255 0,6293 0,6331 0,6369 0,6406 0,6443 0,6480 0,6517 0,4 0,6554 0,6591 0,6628 0,6664 0,6700 0,6736 0,6772 0,6808 0,6844 0,6879 0,5 0,6915 0,6950 0,6985 0,7019 0,7054 0,7088 0,7123 0,7157 0,7190 0,7224 0,6 0,7257 0,7291 0,7325 0,7359 0,7393 0,7427 0,7461 0,7495 0,7529 0,7563 0,7 0,7580 0,7611 0,7642 0,7673 0,7703 0,7734 0,7764 0,7794 0,7823 0,7852 0,8 0,7881 0,7910 0,7939 0,7967 0,7995 0,8023 0,8051 0,8078 0,8106 0,8133 0,9 0,8159 0,8186 0,8212 0,8238 0,8264 0,8289 0,8315 0,8340 0,8365 0,8389 1,0 0,8413 0,8438 0,8461 0,8485 0,8508 0,8531 0,8554 0,8577 0,8599 0,8621 1,1 0,8643 0,8665 0,8686 0,8708 0,8729 0,8749 0,8770 0,8790 0,8811 0,8830 1,2 0,8849 0,8869 0,8888 0,8907 0,8925 0,8944 0,8962 0,8980 0,8997 0,90147 1,3 0,90320 0,90490 0,90658 0,90824 0,90988 0,91149 0,91309 0,91466 0,91621 0,91774 1,4 0,91924 0,92073 0,92220 0,92364 0,92507 0,92647 0,92785 0,92922 0,93056 0,93189 1,5 0,93319 0,93448 0,93574 0,93699 0,93822 0,93943 0,94062 0,94178 0,94295 0,94408 1,6 0,94520 0,94630 0,94738 0,94845 0,94950 0,95053 0,95154 0,95254 0,95352 0,95449 1,7 0,95543 0,95637 0,95728 0,95818 0,95907 0,95994 0,96080 0,96164 0,96246 0,96327 1,8 0,96407 0,96485 0,96562 0,96638 0,96712 0,96784 0,96856 0,96926 0,96995 0,97062 1,9 0,97128 0,97193 0,97257 0,97320 0,97381 0,97441 0,97500 0,97558 0,97616 0,97670 2,0 0,97725 2,1 0,98214 2,2 0,98610 PARA A ÁREA DE 95% TEM-SE 2,3 0,98928 2,4 0,99180 2,5 0,99379 3,0 0,99865
3,5 0,999767 4,0 0,9999683
Tabela 5.1 – Tabela de distribuição normal padrão
645,1=+
R
mxxσ
xm x
Den
sida
de d
e
prob
abili
dade
96
5.2 FILOSOFIA DOS COEFICIENTES DE SEGURANÇA EM FUNDAÇÕES
5.2.1 Introdução
No Brasil há duas filosofias previstas em norma para o projeto de fundações, baseadas
nos conceitos de carga admissível (coeficiente de segurança global) e de carga
característica (coeficientes de segurança parciais).
AOKI (2003) diz que para se fazer uma análise mais sintética do problema de
segurança e confiabilidade de um sistema estrutural é necessário determinar e analisar
as funções de densidade de probabilidade de ocorrência de solicitações e de
resistências, relativas aos elementos que constituem o sistema sob ação de cargas
aleatórias ambientais e funcionais. A ruptura de um elemento do sistema ocorre
quando a solicitação que nele atua torna-se igual à resistência disponível, para uma
dada combinação de cargas. A partir daí, ocorre uma redistribuição das solicitações
nos demais elementos do sistema, com formação sucessiva de rótulas plásticas, sob
ação de cargas crescentes. Finalmente, a ruína ocorre quando o sistema torna-se uma
cadeia cinemática, sob ação de uma combinação de cargas denominada última.
Para o caso de uma fundação por estacas, conhecidas a geometria em planta e o
maciço de solo, as profundidades das bases dos elementos estruturais definem uma
superfície resistente que é o objeto de estudo de segurança e confiabilidade. Neste
caso os valores de solicitação atuante e da resistência disponível são estimados a partir
de métodos teóricos ou empíricos, baseados nos dados estruturais e geotécnicos, com
ou sem consideração da interação entre a superestrutura e a fundação. Uma vez
conhecida a forma e a posição relativa das curvas de resistência e solicitação por seus
valores médios e desvios padrões, a relação entre coeficiente de segurança e a
probabilidade de ruína da fundação torna-se biunívoca, não se podendo tratar
separadamente estes conceitos que são interdependentes. O grau de segurança da
fundação, quantificado pelo maior ou menor afastamento entre as curvas, pode ser
representado pelo quociente ou pela diferença entre determinados valores
representativos de resistência e de solicitação (AOKI, 2003).

97
A Figura 5.3 apresenta as curvas de densidade de probabilidade de solicitações, de
resistências e de probabilidade de ruína do sistema analisado.
Figura 5.3 – Funções estatísticas de solicitação, resistência e probabilidade
de ruína de uma fundação
Em termos do valor médio de solicitação (Sm), o afastamento entre as curvas é
definido pelo valor atribuído ao coeficiente de segurança global (CS). O quociente
entre os valores minorados de resistência com valores majorados de solicitação resulta
na adoção de coeficientes parciais de segurança e na filosofia de dimensionamento no
estado nominal de cálculo. Neste caso considera-se os valores denominados
característicos correspondentes à solicitação máxima e à resistência mínima para uma
probabilidade de ocorrência de 95% (Tabela 5.1). Desta abordagem resultam os
coeficientes de segurança parciais γS e γR que quantificam a variabilidade das
solicitações e resistências e, os coeficientes de segurança parciais de majoração da
solicitação γf e minoração da resistência γm, que dependem da norma de
dimensionamento adotada no projeto. A Figura 5.3 mostra que os afastamentos entre
os valores médios (Sm, Rm), característicos (Sk, Rk) e de cálculo (Sd, Rd) dependem dos
valores dos coeficientes parciais de segurança envolvidos na análise (AOKI, 2003).
Rm
(CS -1)Sm
R, S
fS(S) fR(R)
Den
sida
de d
e pr
obab
ilida
de
Sd = Rd Sk Sm Rk
Sm Sm(γS -1) Sk(γf -1) Rk(1-1/γm) Rm(1-1/γR)
0
A pF
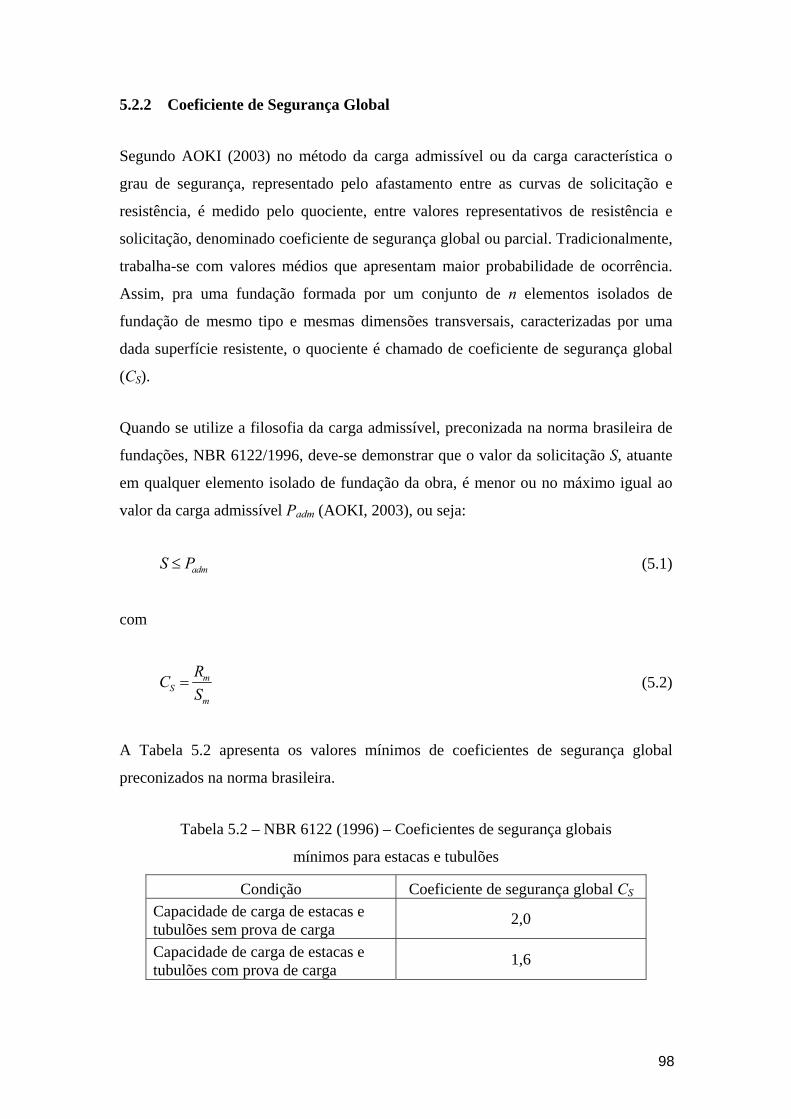
98
5.2.2 Coeficiente de Segurança Global
Segundo AOKI (2003) no método da carga admissível ou da carga característica o
grau de segurança, representado pelo afastamento entre as curvas de solicitação e
resistência, é medido pelo quociente, entre valores representativos de resistência e
solicitação, denominado coeficiente de segurança global ou parcial. Tradicionalmente,
trabalha-se com valores médios que apresentam maior probabilidade de ocorrência.
Assim, pra uma fundação formada por um conjunto de n elementos isolados de
fundação de mesmo tipo e mesmas dimensões transversais, caracterizadas por uma
dada superfície resistente, o quociente é chamado de coeficiente de segurança global
(CS).
Quando se utilize a filosofia da carga admissível, preconizada na norma brasileira de
fundações, NBR 6122/1996, deve-se demonstrar que o valor da solicitação S, atuante
em qualquer elemento isolado de fundação da obra, é menor ou no máximo igual ao
valor da carga admissível Padm (AOKI, 2003), ou seja:
admS P≤ (5.1)
com
mS
m
RCS
= (5.2)
A Tabela 5.2 apresenta os valores mínimos de coeficientes de segurança global
preconizados na norma brasileira.
Tabela 5.2 – NBR 6122 (1996) – Coeficientes de segurança globais
mínimos para estacas e tubulões
Condição Coeficiente de segurança global CS Capacidade de carga de estacas e tubulões sem prova de carga
2,0
Capacidade de carga de estacas e tubulões com prova de carga
1,6
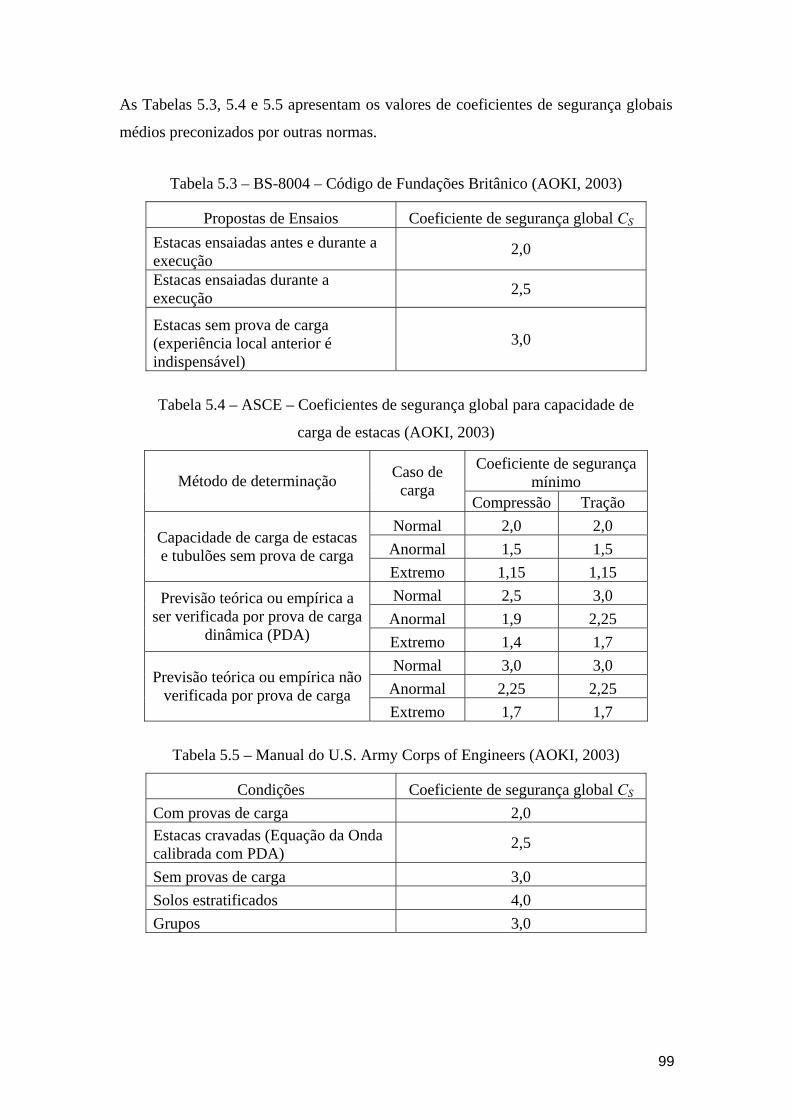
99
As Tabelas 5.3, 5.4 e 5.5 apresentam os valores de coeficientes de segurança globais
médios preconizados por outras normas.
Tabela 5.3 – BS-8004 – Código de Fundações Britânico (AOKI, 2003)
Propostas de Ensaios Coeficiente de segurança global CS Estacas ensaiadas antes e durante a execução
2,0
Estacas ensaiadas durante a execução 2,5
Estacas sem prova de carga (experiência local anterior é indispensável)
3,0
Tabela 5.4 – ASCE – Coeficientes de segurança global para capacidade de
carga de estacas (AOKI, 2003)
Coeficiente de segurança mínimo Método de determinação Caso de
carga Compressão Tração
Normal 2,0 2,0 Anormal 1,5 1,5
Capacidade de carga de estacas e tubulões sem prova de carga
Extremo 1,15 1,15 Normal 2,5 3,0 Anormal 1,9 2,25
Previsão teórica ou empírica a ser verificada por prova de carga
dinâmica (PDA) Extremo 1,4 1,7 Normal 3,0 3,0 Anormal 2,25 2,25
Previsão teórica ou empírica não verificada por prova de carga
Extremo 1,7 1,7
Tabela 5.5 – Manual do U.S. Army Corps of Engineers (AOKI, 2003)
Condições Coeficiente de segurança global CS Com provas de carga 2,0 Estacas cravadas (Equação da Onda calibrada com PDA)
2,5
Sem provas de carga 3,0 Solos estratificados 4,0 Grupos 3,0

100
5.2.3 Coeficientes de Segurança Parciais
Pela Figura 5.3 os coeficientes de segurança parciais podem ser definidos por:
• coeficiente parcial que depende da variabilidade da função solicitação
kS
m
SS
γ = (5.3)
• coeficiente parcial que depende da variabilidade da função resistência
mR
k
RR
γ = (5.4)
sendo ainda
fγ = coeficiente parcial de majoração das solicitações, cujo valor mínimo é fixado em norma
mγ = coeficiente parcial de minoração das resistências, cujo valor mínimo é fixado em norma
No método da carga característica preconizada pela NBR 6122 (1996), trabalha-se
com valores característicos das solicitações Sk e das resistências Rk, caracterizados
pelo número α de desvios padrões correspondentes à probabilidade de ocorrência
desejada.
SSmk SS σα ⋅+= (5.5)
RRmk RR σα ⋅−= (5.6)
onde =Sσ desvio padrão da curva de solicitações =Rσ desvio padrão da curva de resistências =Sα número de desvios padrões de solicitação desejado =Rα número de desvios padrões de resistência desejado

101
Para uma probabilidade de ocorrência de 5% tem-se 645,1== RS αα (Tabela 5.1).
Conhecidos os valores de desvios padrões, resultam os seguintes coeficientes de
variação:
m
SS S
vσ
= (5.7)
m
RR R
vσ
= (5.8)
Neste caso os valores característicos valem:
( )1k m S SS S vα= + ⋅ (5.9)
( )1k m R RR R vα= − ⋅ (5.10)
O coeficiente de segurança pode também ser aplicado à relação entre a resistência
mínima esperada com uma determinada probabilidade de ocorrência e a solicitação
máxima esperada condicionada a uma determinada probabilidade de ocorrência. Esta
relação entre valores característicos de resistência e solicitação conduz ao coeficiente
de segurança global característico mínimo condicionado:
( )( )SSm
RRm
k
kk vS
vRSR
C⋅+⋅−
==αα
11
(5.11)
Quando se utiliza a filosofia da carga característica, deve-se demonstrar que a carga
ou solicitação de cálculo (Sd) é menor ou no máximo igual ao valor da resistência de
cálculo (Rd), ou seja:
dd RS ≤ (5.12)
onde

102
fSmfkd SSS γγγ ⋅⋅=⋅= (5.13)
Rm
m
m
kd
RRR
γγγ ⋅== (5.14)
Para o caso de solicitação constante, as seguintes simplificações são válidas:
SSS mk == ; 0=Sσ ∴ 0=Sv ; 1=Sγ (5.15)
( )Rm
mfm
RS
γγγ
⋅≤⋅ (5.16)
Neste caso particular a norma brasileira NBR 6122 (1996) fixa os seguintes valores
mínimos de coeficientes de segurança parciais:
2,1=mγ (para obra com prova de carga)
5,1=mγ (para obra sem prova de carga)
O coeficiente de majoração de solicitação fγ preconizado pela norma brasileira NBR
8681 (1984) vale 1,4 (AOKI, 2003). Para o caso de uma obra com prova de carga
resulta:
( )R
mm
RS
γ⋅≤⋅
2,14,1 (5.17)
OLIVEIRA e AOKI (1998) demonstraram que, para estacas de concreto armado ou
protendido com solicitações permanentes, esse valor de fγ é exagerado e propõem
1,15.
A comparação entre a metodologia de comprovação de segurança, baseada em
coeficientes de segurança global e parcial, no contexto da Figura 5.3, mostra que o
coeficiente de segurança global é composto por fatores constantes e variáveis:
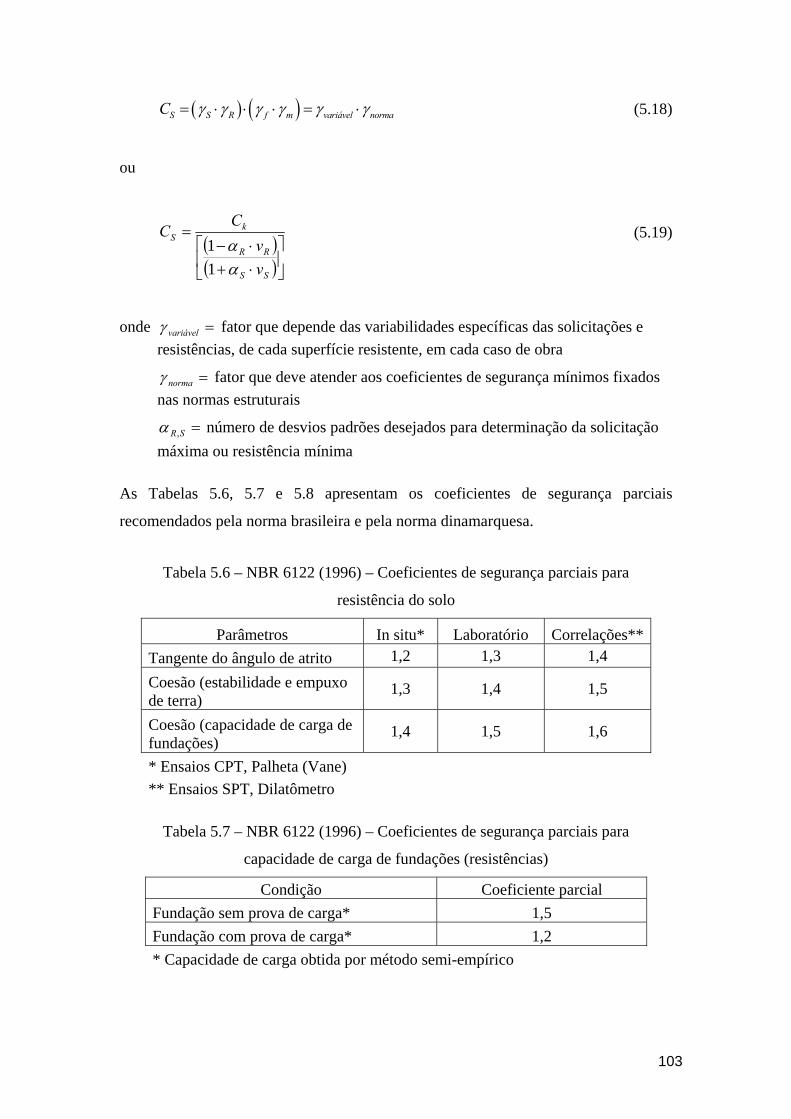
103
( ) ( )S S R f m variável normaC γ γ γ γ γ γ= ⋅ ⋅ ⋅ = ⋅ (5.18)
ou
( )( )⎥⎦
⎤⎢⎣
⎡⋅+⋅−
=
SS
RR
kS
vv
CC
αα
11
(5.19)
onde =lvariáveγ fator que depende das variabilidades específicas das solicitações e resistências, de cada superfície resistente, em cada caso de obra
=normaγ fator que deve atender aos coeficientes de segurança mínimos fixados nas normas estruturais
=SR,α número de desvios padrões desejados para determinação da solicitação máxima ou resistência mínima
As Tabelas 5.6, 5.7 e 5.8 apresentam os coeficientes de segurança parciais
recomendados pela norma brasileira e pela norma dinamarquesa.
Tabela 5.6 – NBR 6122 (1996) – Coeficientes de segurança parciais para
resistência do solo
Parâmetros In situ* Laboratório Correlações** Tangente do ângulo de atrito 1,2 1,3 1,4
Coesão (estabilidade e empuxo de terra)
1,3 1,4 1,5
Coesão (capacidade de carga de fundações)
1,4 1,5 1,6
* Ensaios CPT, Palheta (Vane) ** Ensaios SPT, Dilatômetro
Tabela 5.7 – NBR 6122 (1996) – Coeficientes de segurança parciais para
capacidade de carga de fundações (resistências)
Condição Coeficiente parcial Fundação sem prova de carga* 1,5 Fundação com prova de carga* 1,2 * Capacidade de carga obtida por método semi-empírico

104
Tabela 5.8 – Norma Dinamarquesa DS415 - Coeficientes de segurança
parciais de minoração de resistência (AOKI, 2003)
Coeficiente parcial de minoração Condição
Normal Especial Capacidade de carga de elementos isolados de fundação sem prova de carga
2,0 2,2
Capacidade de carga de elementos isolados de fundação com prova de carga
1,6 1,75
Estaca sujeita a ensaio de prova de carga 1,4 1,55
Tabela 5.9 – Norma Dinamarquesa DS415 - Coeficientes de segurança
parciais de majoração das solicitações (AOKI, 2003)
Ações Coeficiente parcial de majoração
Cargas permanentes 1,0 Cargas móveis 1,3
5.3 PROBABILIDADE DE RUPTURA
Segundo AOKI et al. (2002) qualquer medida de segurança é função da posição
relativa e do grau de dispersão das curvas de densidade de probabilidade de
solicitação fS(S) e da resistência fR(R). Considera-se que estas curvas referem-se a uma
superfície resistente que representa a fundação da obra em estudo. Neste caso a
probabilidade de ruína pF da fundação, que envolve a relação entre a distribuição de
solicitação e resistência do grupo, pode ser expressa por:
( ) ( )0
F R Sp F R f S dx∞
= ⋅∫ (5.20)
A Equação 5.3 é a convolução em relação à solicitação fS(x) e envolve a probabilidade
e ocorrência de valores correntes de resistências R menores ou iguais às solicitações S.
No ponto A da Figura 5.2, a densidade de probabilidade de solicitação e de resistência
são iguais. A área que define a probabilidade de ruptura pF encontra-se na região de
superposição, ou seja, sob a curva de resistência à esquerda do ponto A e, sob a curva
de solicitação à direita do mesmo ponto. Quanto maior a área, maior a probabilidade
de ruptura, ou seja, menor a confiabilidade ou probabilidade de sucesso

105
(sobrevivência) da fundação. Neste caso a probabilidade de sucesso que é igual ao
complemento (1-pF) sob estas curvas, maior a probabilidade de ruína da fundação
(AOKI, 2003).
Figura 5.2 – Funções de densidade de probabilidade fR(R) e fS(S)
Em Engenharia o que interessa é conhecer a probabilidade de ruptura, mas para isso é
necessário conhecer a distribuição das solicitações, o que não ocorre nos métodos
semiprobabilísticos (ALONSO, 1988).
5.4 MÉTODO DO ÍNDICE DE CONFIABILIDADE
Segundo SMITH (1986) o método do índice da confiabilidade envolve matemática
relativamente simples e há uma concordância geral em que este método tem o
potencial de ser usado como um método direto de projeto.
No método do índice de confiabilidade, para distribuições de resistência e solicitação
normais, pode-se trabalhar com a função margem de segurança M, mostrada na Figura
5.4.

106
Geralmente, não há informação suficiente quanto às extremidades da distribuição de
M e o critério [ ]0≤= MppF é substituído por outro que envolve o valor médio e o
desvio padrão de M (SMITH,1986).
Na Figura 5.4, a distância da média M, Mm, à fronteira de ruína, isto é, ao ponto em
que M = 0, pode ser expressa em termos de σM, o desvio padrão de M, fazendo-a igual
a Mσβ ⋅ . β é conhecido como índice de confiabilidade e é uma medida da segurança
do sistema.
Tem-se
0=⋅− MmM σβ ∴ M
mMσ
β = (5.21)
onde
( )mmm SRM −= (5.22)
então
( )M
mm SRσ
β−
= (5.23)
Para distribuições normais o desvio padrão da margem de segurança M vale:
( )21
22RSM σσσ += (5.24)
Podemos então expressar então o índice de confiabilidade β da seguinte forma:
( )
( )1
2 2 2
m m
S R
R Sβ
σ σ
−=
+ (5.25)
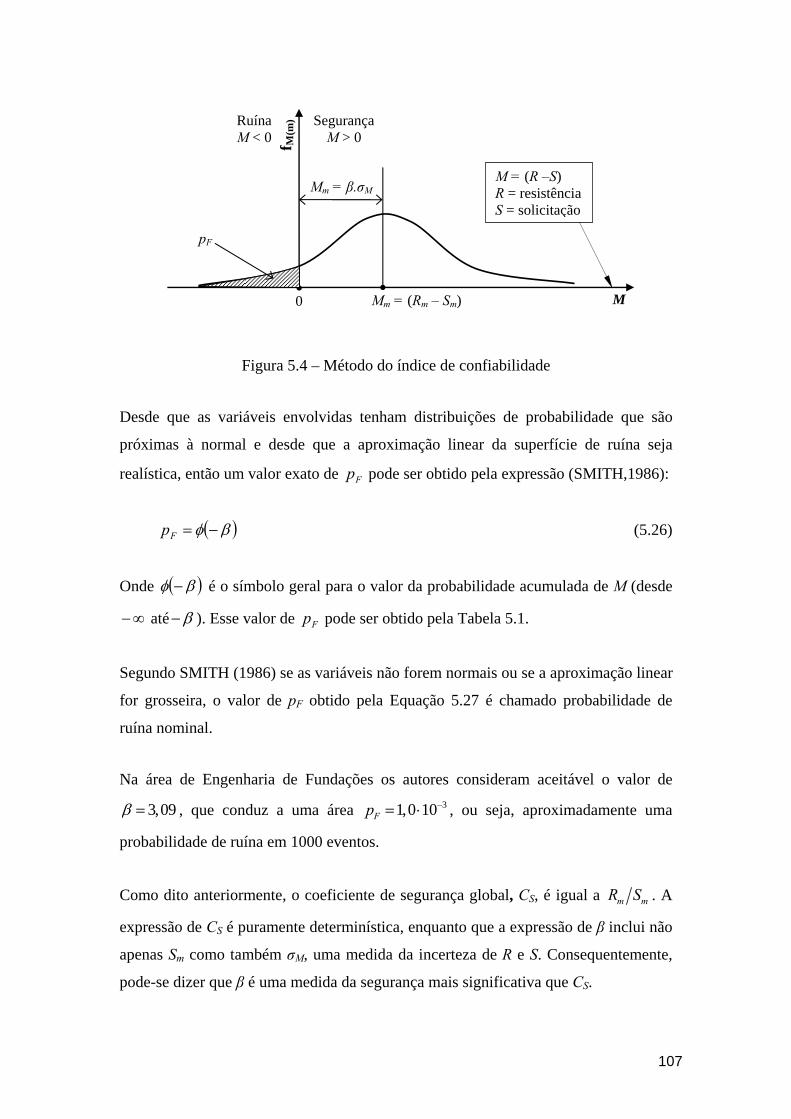
107
Figura 5.4 – Método do índice de confiabilidade
Desde que as variáveis envolvidas tenham distribuições de probabilidade que são
próximas à normal e desde que a aproximação linear da superfície de ruína seja
realística, então um valor exato de Fp pode ser obtido pela expressão (SMITH,1986):
( )βφ −=Fp (5.26)
Onde ( )βφ − é o símbolo geral para o valor da probabilidade acumulada de M (desde
∞− até β− ). Esse valor de Fp pode ser obtido pela Tabela 5.1.
Segundo SMITH (1986) se as variáveis não forem normais ou se a aproximação linear
for grosseira, o valor de pF obtido pela Equação 5.27 é chamado probabilidade de
ruína nominal.
Na área de Engenharia de Fundações os autores consideram aceitável o valor de
3,09β = , que conduz a uma área 31,0 10Fp −= ⋅ , ou seja, aproximadamente uma
probabilidade de ruína em 1000 eventos.
Como dito anteriormente, o coeficiente de segurança global, CS, é igual a m mR S . A
expressão de CS é puramente determinística, enquanto que a expressão de β inclui não
apenas Sm como também σM, uma medida da incerteza de R e S. Consequentemente,
pode-se dizer que β é uma medida da segurança mais significativa que CS.
Ruína M < 0
Segurança M > 0
Mm = β.σM M = (R –S) R = resistência S = solicitação
Mm = (Rm – Sm)
pF
f M(m
) 0 M

108
5.5 APLICAÇÃO AOS CASOS DE OBRA
Um exercício de avaliação dos fatores de segurança e do índice de confiabilidade foi
feito com base nos resultados das provas de carga dinâmicas, realizadas nas 3 obras
que compõem o banco de dados desta dissertação.
Conforme esquematizado na Figura 5.1, os valores das solicitações atuantes nas
estacas são desconhecidos e dependem das cargas estáticas, como por exemplo, o
peso próprio da estrutura, e das cargas variáveis (cargas de vento, etc.) atuantes. Estas
solicitações são fixadas determinísticamente e dependem do tipo da obra. Prédios com
estruturas esbeltas e leves têm uma influência das cargas variáveis maior do que as
estruturas pesadas, onde o peso próprio é o fator preponderante. Ainda, as cargas de
ocupação podem ter um peso maior ou menor, dependendo do tipo de obra.
Para o exercício de aplicação da teoria descrita neste capítulo, as estacas foram
divididas em grupos de acordo com a carga de trabalho para as quais foram cravadas,
e, também, considerando estacas com as mesmas seções transversais ou próximas. No
entanto, a aplicação correta seria avaliar os fatores de segurança para grupos de
estacas com a mesma seção transversal, e ainda, cravadas em solos idênticos.
Os valores calculados da resistência e fixados para a solicitação partem da premissa
básica de que cada estaca das respectivas tabelas apresenta igual grau de
representatividade no estaqueamento estudado.
As Tabelas 5.10, 5.11, 5.12, 5.13, 5.14 e 5.15 apresentam os resultados de provas de
carga para as 3 obras. Nestas tabelas L é o comprimento da estaca, A é a área da seção
de concreto da estaca, σ e v representam respectivamente o desvio padrão e o
coeficiente de variação da resistência e da solicitação.
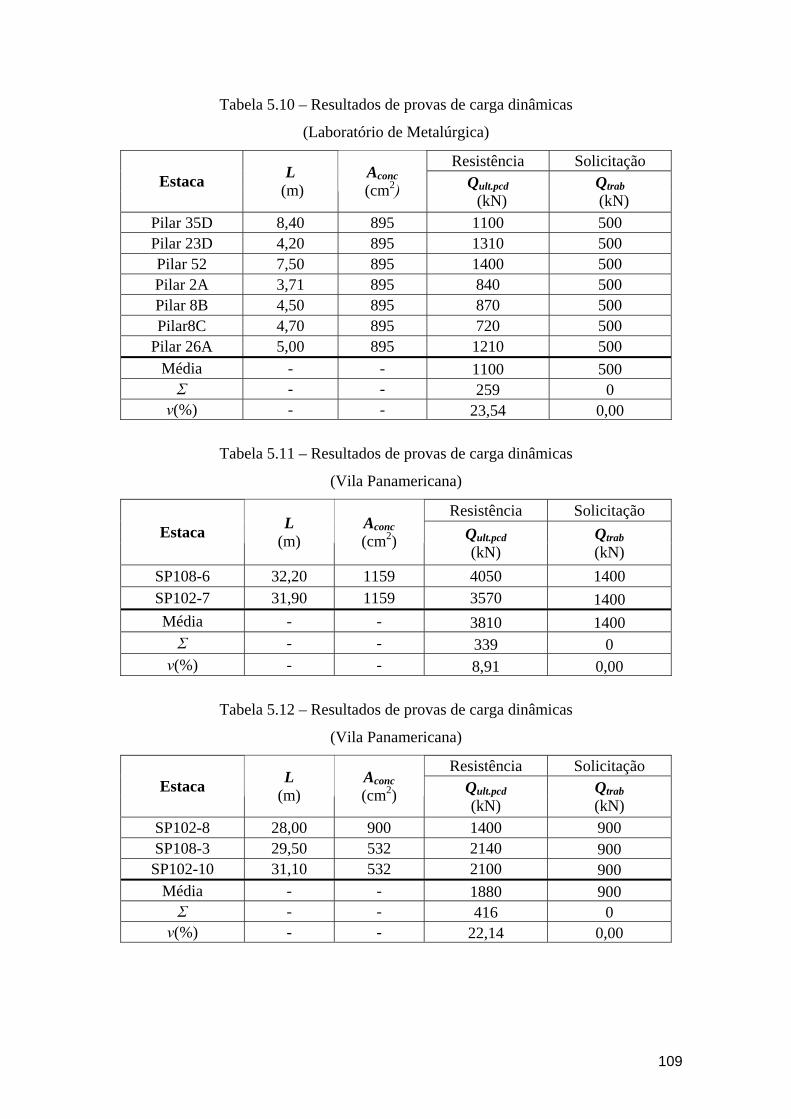
109
Tabela 5.10 – Resultados de provas de carga dinâmicas
(Laboratório de Metalúrgica)
Resistência Solicitação Estaca L
(m) Aconc (cm2) Qult.pcd
(kN) Qtrab
(kN) Pilar 35D 8,40 895 1100 500 Pilar 23D 4,20 895 1310 500 Pilar 52 7,50 895 1400 500 Pilar 2A 3,71 895 840 500 Pilar 8B 4,50 895 870 500 Pilar8C 4,70 895 720 500
Pilar 26A 5,00 895 1210 500 Média - - 1100 500 Σ - - 259 0
v(%) - - 23,54 0,00
Tabela 5.11 – Resultados de provas de carga dinâmicas
(Vila Panamericana)
Resistência Solicitação Estaca L
(m) Aconc (cm2) Qult.pcd
(kN) Qtrab (kN)
SP108-6 32,20 1159 4050 1400 SP102-7 31,90 1159 3570 1400 Média - - 3810 1400 Σ - - 339 0
v(%) - - 8,91 0,00
Tabela 5.12 – Resultados de provas de carga dinâmicas
(Vila Panamericana)
Resistência Solicitação Estaca L
(m) Aconc (cm2) Qult.pcd
(kN) Qtrab (kN)
SP102-8 28,00 900 1400 900 SP108-3 29,50 532 2140 900 SP102-10 31,10 532 2100 900
Média - - 1880 900 Σ - - 416 0
v(%) - - 22,14 0,00
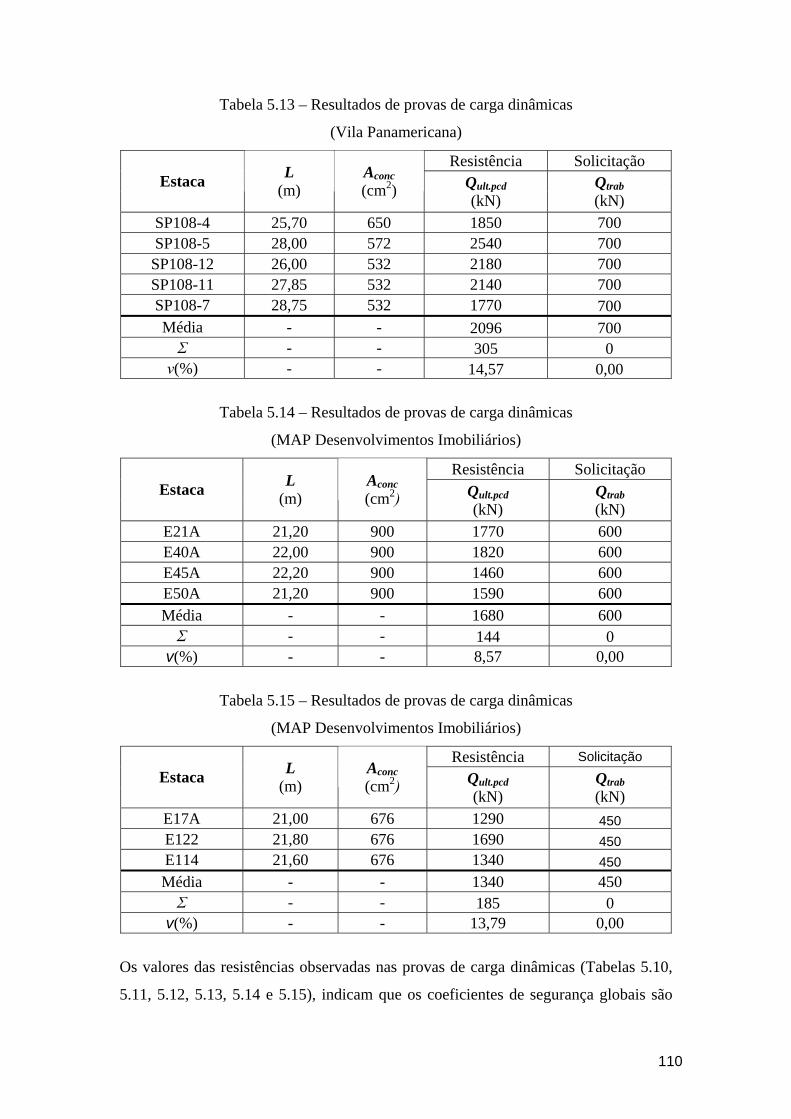
110
Tabela 5.13 – Resultados de provas de carga dinâmicas
(Vila Panamericana)
Resistência Solicitação Estaca L
(m) Aconc (cm2) Qult.pcd
(kN) Qtrab (kN)
SP108-4 25,70 650 1850 700 SP108-5 28,00 572 2540 700 SP108-12 26,00 532 2180 700 SP108-11 27,85 532 2140 700 SP108-7 28,75 532 1770 700 Média - - 2096 700 Σ - - 305 0
v(%) - - 14,57 0,00
Tabela 5.14 – Resultados de provas de carga dinâmicas
(MAP Desenvolvimentos Imobiliários)
Resistência Solicitação Estaca L
(m) Aconc (cm2) Qult.pcd
(kN) Qtrab (kN)
E21A 21,20 900 1770 600 E40A 22,00 900 1820 600 E45A 22,20 900 1460 600 E50A 21,20 900 1590 600 Média - - 1680 600 Σ - - 144 0
v(%) - - 8,57 0,00
Tabela 5.15 – Resultados de provas de carga dinâmicas
(MAP Desenvolvimentos Imobiliários)
Resistência Solicitação Estaca L
(m) Aconc (cm2) Qult.pcd
(kN) Qtrab (kN)
E17A 21,00 676 1290 450 E122 21,80 676 1690 450 E114 21,60 676 1340 450 Média - - 1340 450 Σ - - 185 0
v(%) - - 13,79 0,00
Os valores das resistências observadas nas provas de carga dinâmicas (Tabelas 5.10,
5.11, 5.12, 5.13, 5.14 e 5.15), indicam que os coeficientes de segurança globais são

111
maiores que 2,0 para os 3 casos de obra (Tabela 5.16), embora a NBR 6122 (1996)
aceite um valor mínimo de 1,6 para estacas com provas de carga. No que diz respeito
ao coeficiente de majoração de solicitação γf, nos 3 casos de obra este valor só não
ficou acima de 1,4 (valor mínimo estabelecido pela NBR 8681, 1984) no Laboratório
de Metalúrgica e na Vila Panamericana para o caso de estacas com carga de trabalho
igual a 900 kN.
AOKI et al. (1998) propõem adotar γf = 1,15 para estacas de concreto armado ou
protendido com solicitações permanentes. O EUROCÓDIGO 7 (2004) recomenda γf =
1,0 para pressão de água e cargas acidentais, γf = 1,1 para cargas permanentes e γf =
1,5 para cargas móveis e ambientais.
Tabela 5.16 – Fatores de segurança obtidos para os 3 casos de obra
Fatores de segurança Lab. Metalúrgica Vila Panamericana MAP
Qtrab (kN) 500 1400 900 700 600 450
m
mS S
RC = 2,20 2,72 2,09 2,99 2,98 2,80
kS
m
SS
γ = ( )1 S Svα= + ⋅ 1,00* 1,00* 1,00* 1,00* 1,00* 1,00*
mR
k
RR
γ =( )
11 R Rvα
=− ⋅
1,63 1,17 1,57 1,32 1,29 1,16
variável S Rγ γ γ= ⋅ 1,63 1,17 1,57 1,32 1,29 1,16
Snorma
variável
Cγγ
= 1,20 2,32 1,33 2,28 2,30 2,41
normaf
m
γγγ
=2,1
normaγ= 1,12 1,94 1,11 1,90 1,92 2,00
* arbitrado, na falta de informações
A Tabela 5.17 mostra os resultados do índice de confiabilidade β obtido para os 3
casos de obra.
A probabilidade de ruína atingiu um índice considerado fora da média para o
Laboratório de Metalúrgica e na Vila Panamericana, no caso de estacas com carga de

112
trabalho igual a 900 kN, refletindo a ordem de grandeza dos coeficientes de segurança
parciais γf obtidos para estes dois casos. Para os demais casos a probabilidade de ruína
ficou dentro do limite aceitável para a Engenharia de Fundações.
Tabela 5.17 – Índices de confiabilidade obtidos para os 3 casos de obra
Valores determinados
Lab. Metalúrgica Vila Panamericana MAP
Qtrab (kN) 500 1400 900 700 600 450
Rm 1100 3810 1880 2096 1680 1340
Sm 500 1400 900 700 600 450
σS 0 0 0 0 0 0
σR 259 339 416 305 144 185
( )
( )1
2 2 2
m m
S R
R Sβ
σ σ
−=
+ 2,32 7,10 2,35 4,57 7,50 4,81
Fp 1/93 < 1/1000 1/95 < 1/1000 < 1/1000 < 1/1000
A probabilidade de ruína atingiu um índice considerado fora da média para o
Laboratório de Metalúrgica e na Vila Panamericana, no caso de estacas com carga de
trabalho igual a 900 kN, refletindo a ordem de grandeza dos coeficientes de segurança
parciais γf obtidos para estes dois casos. Para os demais casos, a probabilidade de
ruína ficou dentro do limite aceitável para a Engenharia de Fundações.
Os comentários acima dizem respeito a um exercício de avaliação de segurança, feito
com alguns dados das três obras, e não deve ser entendido como uma avaliação válida
para estas obras. Os dados da Vila Panamericana, por exemplo, foram obtidos de um
conjunto de provas de carga preliminares com tipos de estacas que não foram
necessariamente aqueles utilizados na obra.

113
CAPÍTULO 6
CONSIDERAÇÕES FINAIS, CONCLUSÕES E SUGESTÕES
6.1 CONSIDERAÇÕES FINAIS
O desenvolvimento de técnicas de controle da cravação de estacas, baseadas nas
medições simples de nega e repique como as mais complexas, como a monitoração
com instrumentos eletrônicos (provas de carga dinâmicas), deve ser estimulado. Em
qualquer técnica de controle deve-se dar uma atenção especial à questão da
recuperação do solo após a interrupção da cravação (“set-up”), fenômeno capaz de
alterar consideravelmente a capacidade de carga de estacas cravadas em solos finos.
Face à natural heterogeneidade do subsolo, o controle da cravação de estacas pré-
moldadas através da nega (e eventualmente do repique), é imprescindível, já que é um
método simples de garantir a homogeneidade do estaqueamento.
As provas de carga dinâmicas consistem em um importante método de controle de
estaqueamentos. No entanto, as provas de carga estáticas são as únicas capazes de
aferir diretamente a capacidade de carga estática da estaca embutida no solo suporte.
Este ponto deve ser ressaltado, uma vez que a simplicidade, a rapidez e o baixo custo
das provas de carga dinâmicas levam à tentativa de substituição integral da execução
das provas de carga estáticas nas obras civis. O conhecimento real da capacidade de
carga estática é, inclusive, essencial para a aferição dos parâmetros do solo
necessários ao modelo dinâmico. Para uma melhor avaliação da carga de ruptura, é
essencial que as provas de carga estáticas sejam levadas até a ruptura das estacas, pois
a adoção de métodos de extrapolação da curva carga-recalque induz a erros
desconhecidos.
O diagrama de cravação consiste em um importante método de controle da qualidade
de um estaqueamento. Para um controle mais eficiente, o ideal é que se fosse
114
realizado em todas as estacas, e não apenas em 10% do total destas, conforme
recomenda a norma brasileira NBR 6122 (1996).
6.2 CONCLUSÕES
A correlação obtida entre o NSPT e o Nestaca pode transformar o diagrama de cravação
em um método importante para verificação do perfil do subsolo e, ainda, se constituir
num método para a previsão da capacidade de carga estática de estacas pré-moldadas.
Através desta correlação é possível, ainda, prever o número de golpes necessários
para cravar uma estaca até uma profundidade desejada. No entanto, a correlação
apresentada nesta tese deve ser aferida com um banco de dados maior, para que se
possa ter uma maior confiança no seu uso. Esta aferição é importante para que se
possa até mesmo sugerir diferentes correlações, para diferentes tipos de solos, etc.
O uso do diagrama de cravação como aferidor do perfil de resistência do terreno se
mostrou promissor.
O emprego do diagrama de cravação acoplado a uma Fórmula Dinâmica se mostrou
prático e útil. O sucesso deste emprego depende, naturalmente, da capacidade
preditiva da fórmula escolhida.
A comparação dos valores de capacidade de carga de estacas previstos pela Fórmula
dos Dinamarqueses com outros métodos, em particular com as provas de carga
dinâmicas, mostrou que esta fórmula superestima a capacidade de carga de estacas
com comprimentos inferiores a 30 vezes o seu diâmetro. Para comprimentos maiores
os resultados se mostraram mais condizentes com a realidade das provas de carga
dinâmicas.
Quanto à avaliação dos coeficientes de segurança em uma obra por estacas, em cada
caso o critério para a escolha destes coeficientes, na previsão da carga admissível,
deve ser feito considerando-se a probabilidade de ruína associada. Nos exercícios
feitos nas três obras, as obras do Laboratório de Metalúrgica da COPPE e da Vila
Panamericana (caso de estacas com carga de trabalho de 900 kN), com coeficientes de
115
segurança globais iguais a 2,20 e 2,09 respectivamente, obteve-se uma probabilidade
de ruína considerada abaixo da média na área de Engenharia de Fundações.
Esta abordagem probabilística da avaliação da segurança de estaqueamentos está se
tornando necessária na medida que um número maior de provas de carga (em especial
dinâmicas) está sendo realizado em obras.
O valor do coeficiente de segurança global envolve fatores variáveis e fatores fixos. O
coeficiente de majoração de solicitação γf, componente da parcela fixa em norma,
deveria ser reformulado à luz de novos estudos, conforme o sugerido por outros
autores, para o caso particular de obras de fundações.
6.3 SUGESTÕES PARA TESES FUTURAS
Criar um banco de dados maior, para verificar a correlação proposta nesta dissertação
ou estabelecer nova formulação, considerando o tipo de solo, etc.
Verificar ou estabelecer novas correlações a partir de simulação da cravação do SPT e
da estaca através de solução da Equação da Onda. Nestas simulações, podem ser
consideradas diferentes porcentagens de carga na ponta e de atrito lateral da estaca.
Ainda, diferentes tipos de estacas poderiam ser simulados, como estacas de aço, tipo
Franki, etc.
Um banco de dados mais amplo de provas de carga estáticas e dinâmicas deve ser
encorajado para a avaliação de Fórmulas Dinâmicas, em particular a Fórmula dos
Dinamarqueses, para estacas pré-moldadas de concreto.

116
REFERÊNCIAS BIBLIOGRÁFICAS
ABEF, (1999) “Manual de especificações de produtos e procedimentos ABEF”,
Associação Brasileira de Empresas de Engenharia de Fundações e Geotecnia, 2ª
edição.
AGERSCHOU, H.A., (1962) “Analysis of the Engineering News pile formula”, J.
Soil Mech. Fdns. Div., ASCE, 88, SM 8, pp. 13-34.
ALONSO, U.R., (1988) “Previsão e controle de fundações”, Editora Edgar Blucher
Ltda, São Paulo.
ALVES, A. M. L., LOPES, F. R. e DANZIGER, B. R., (2004) “Métodos dinâmicos
para previsão e controle do comportamento de estacas cravadas”, Teoria e Prática na
Engenharia Civil, Porto Alegre, vol. 4, p. 12-21.
ALVES, A.M.L. e LOPES, F.R., (2004) “Estacas de deslocamento: Tipos, aplicações
e controle de execução”, Seminário sobre fundações profundas, ABMS, Porto Alegre.
ALVES, A.M.L., (2004) “A influência da viscosidade do solo e do tempo após a
cravação na interação dinâmica estaca-solo em argilas”, Tese de D.Sc., COPPE-
UFRJ, Rio de Janeiro.
AMARAL, A.B.T., AMARAL, J.C., CELLI, G.C.D., ANDREGHETONI, P.P. e
DANTAS, B., (2002) “Sobre a cravação de estacas pré-moldadas: uma correlação
semi-empírica entre o número de golpes do martelo por metro e o valor do Nspt da
sondagem a percussão”, Anais, XII COBRAMSEG, São Paulo, vol. 3, pp. 1483-1491.
AOKI, N. e ALONSO, U.R., (1990) “Avaliação da segurança em obras de estacas
cravadas”, 6º CBGE/IX COBRAMSEF, Salvador, vol. 2, pp. 321-324.
AOKI, N. e CINTRA, J.C.A., (1990) “Carga admissível e carga característica de
fundações por estacas”, Revista Solos e Rochas, São Paulo, pp. 137-142.
117
AOKI, N., MENEGOTTO, M.L. e CINTRA, J.C.A., (2002) “Probabilidade de ruína
como critério para definir o coeficiente de segurança a ser usado na previsão da carga
admissível de fundações por estacas”, XII COBRAMSEF, São Paulo, vol. 3, pp.
1471-1481.
AOKI, N., (1986) “Controle in situ da capacidade de carga de estacas pré-fabricadas
via repique elástico da cravação”, ABMS/ABEF/Instituto de Engenharia, São Paulo.
AOKI, N., (2003) “Notas de aula – Segurança e confiabilidade de fundações”, USP-
Escola de Engenharia de São Carlos-Departamento de Geotecnia.
ARAÚJO, M.G., (1988) “Avaliação de métodos de controle da cravação de estacas –
aplicação a dois casos de obras”, Tese de M.Sc., COPPE-UFRJ, Rio de Janeiro.
AOKI, N. and VELLOSO, D.A., (1975) “An approximate method to estimate the
bearing capacity of piles”, Proceedings, 5th. Pan American CSMFE, Buenos Aires,
vol.1, pp. 367-376.
ASTM – D1586-67, (1958) “Standard method for penetration test and split barrel
sampling of soils”, American Society for Testing and Materials.
BELICANTA, A., (1998) “Avaliação dos fatores intervenientes no índice de
resistência à penetração do SPT”, Tese de D.Sc.,USP, São Carlos, São Paulo.
BELL, K.R., DAVIE, J.R., CLEMENTE, J.L. and LIKENS, G., (2002) “Proven
success for driven pile foundations”, PileDrivers. Org, vol. 3, nº 4, pp. 21-26.
BERIGEN, F.L., VAN HOOYDONK, W.R. and SCHAAP, L.H.J., (1980) “Dynamic
pile testing: an aid in analyzing driving behaviour”, Proceedings, Int. Seminar on the
Application of Stress-Wave Theory to Piles, Stockholm, pp. 77-97.
BOWLES, J.E., (1968) “Foundations analysis and design”, McGraw-Hill Book
Company, New York.

118
BRITISH STANDARDS INSTITUTION, (1972) “Code of practice for foundations”.
BUSSAB, W.O., (1999) “Análise de variância e regressão”, 2ª edição, Atual Editora,
São Paulo.
CHELLIS, R.D., (1961) “Pile foundations”, McGraw-Hill Book Company, New
York, 2ª edição.
CLOUGH, R.D. and PENZIEN, J., (1975) “Dynamics of structures", McGraw-Hill
Kogakusha, Tokyo.
DANZIGER, B.R. and FERREIRA, J.S., (2000) “Back-analysis of pile driving for
quality assurance”, Anais, 6ª International Conference on the Application of the
Stress-Wave Theory to Piles, São Paulo, Brasil, pp. 657-663.
DÉCOURT, L., AOKI, N. e GODOY, N. S., (1983) “Capacidade de carga de estacas
pré-moldadas”, Encontro Técnico, ABMS, São Paulo.
DÉCOURT, L. e QUARESMA, A.R., (1978) “Capacidade de carga de estacas a partir
de valores de SPT", anais, 6º CBMSEF, Rio de Janeiro, vol. 1, pp. 45-53.
EUROCÓDIGO 7, (2001) “Proyecto Geotécnico – parte 2: Proyecto asistido por
ensayos de laboratório”, Associação Espanhola de Normalização e Certificação.
EUROCODE 7, (2004) “Geotechnical Design – Part 1: General rules”, European
Committee for Standardization.
FERREIRA, A.C., (1985) "Efeito do tempo de carregamento e a questão dos
recalques de estacas em prova de carga", Tese de M.Sc., COPPE-UFRJ, Rio de
Janeiro.
FRANCISCO, G.M., (2004) "Estudo dos efeitos do tempo em estacas de fundação em
solos argilosos" Tese de D.Sc., COPPE-UFRJ, Rio de Janeiro.

119
GOBLE, G.G.; RAUSCHE, F. and LIKINS, G., (1980) “The analysis of pile driving –
a state-of-the-art.”, Anais, 1ª International Conference on the Application of the
Stress-Wave Theory to Piles, Estocolmo, Suécia, pp. 130-161.
GOMES, R.C, (1986) "Análise do comportamento carga-recalque e metodologia de
controle da implantação de estacas cravadas", Tese de M.Sc., COPPE-UFRJ, Rio de
Janeiro.
GOMES, R. C. e LOPES, F. R., (1986) “Uma avaliação de métodos de controle da
cravação de estacas”, VIII COBRAMSEF, Porto Alegre, vol. 6, pp. 23-34.
HACHICH, W., (1988) “Segurança das fundações e escavações”, Fundações: Teoria e
Prática, Editora PINI, ABMS/ABEF, pp. 197-208.
HOLEYMAN, A., (1992) “Technology of pile dynamic testing”, Keynote Lecture,
Proceedings, 4th. International Conference on the Application of the Stress-Wave
Theory to Piles, The Hage, pp. 195-215.
JANZ, J.W.; VAN HAMME; G.E.J.S.L.; GERRITSE, A. and BOMER, H., (1976)
“Controlled pile driving above and under water with a hydraulic hammer”,
Proceedings, Offshore Technology Conference, Dallas, paper 2477, pp. 593-609.
MILITITSKY, J., e SCHNAID, F., (1995) “Uso do SPT em fundações –
Possibilidades e Limitações, Avaliação Crítica”, in: XXVII Jornadas Sudamericanas
de Ingeniería Estructural. Vol. 6, Tucuman, Argentina, pp. 125-138.
MOHAN, D., JAIN, G.S.and JAIN, M.P., (1967) “A new approach to load tests”,
Geotechnique, vol. 17, nº 3, pp. 274-283.
NBR 6484, (1980) “Execução de sondagens de simples reconhecimento”, Associação
Brasileira de Normas Técnicas, Rio de Janeiro.
NBR 8681, (1984) “Ações e segurança nas estruturas”, Associação Brasileira de
Normas Técnicas, Rio de Janeiro.
120
NBR 12131, (1991) “Estacas – Prova de carga estática”, Associação Brasileira de
Normas Técnicas, Rio de Janeiro.
NBR 13208, (1994) “Estacas – Ensaio de carregamento dinâmico”, Associação
Brasileira de Normas Técnicas, Rio de Janeiro.
NBR 6122, (1996) “Projeto e execução de fundações”, Associação Brasileira de
Normas Técnicas, Rio de Janeiro.
NIYAMA, S., (1983) “Medições dinâmicas na cravação de estacas”, Tese de M.Sc.,
EP-USP, São Paulo.
NIYAMA. S., AOKI, N. e CHAMECKI, P.R., (1988) “Verificação de desempenho”,
Fundações: teoria e prática, Editora PINI, ABMS/ABEF, pp. 723-751.
OLIVEIRA, S.K.F. e AOKI, N., (1998) “Análise da segurança no projeto de
fundações por estacas: Método dos estados limites”, XI COBRAMSEG, Brasília, DF,
vol. quatro, pp. 1399-1406.
POULOS, H.G. and DAVIS, E.H., (1980) “Pile foundation analysis and design”, John
Willey, New York.
RAUSHE, F., GOBLE,G.G. and LIKINS, G.E., (1985) “Dynamic determination of
pile capacity”, JGED, ASCE, vol. 111, nº 3, pp. 367-383.
SANTOS, J. A., (2000) “Notas de aula – Controle de Qualidade de Estacas”, Instituto
Superior Técnico, Lisboa.
SCHNAID, F., (2000) “Ensaios de campo e suas aplicações à engenharia de
fundações”, Oficina de Textos, São Paulo.
SKEMPTON, A.W., (1986) “Standard Penetration Test procedures and the effects in
sands of overburden pressure, relative density, particle size, ageing and
overconsolidation”, in: Géotechnique, 36, 3, 425-447.
121
SORENSEN, T. and HANSEN, B., (1957) “Pile driving formulae – An investigation
based on dimensional considerations and a statistical analysis”, Proceedings, 4th
ICSMFE, London, vol. 2, pp. 61-65.
SOUZA FILHO, J. M. e ABREU, P. S. B., (1990) “Procedimentos para controle de
cravação de estacas pré-moldadas de concreto”, 6º CBGE/IX COBRAMSEF,
Salvador, vol. 2, pp. 309-320.
SMITH, G.N., (1986) “Probability and statistics in civil engineering: an introduction”,
Collins, London.
TAVENAS, F. and ANDY, R., (1972) “Limitations of the driving formulas for
predicting the bearing capacities of piles in sand”, Canadian Geotechnical Journal,
vol. 14, nº1, pp. 34-51.
UTO, K., FUYUKI, M., SAKURAI, M., HASHIZUME, T., OSHIMA, J., SAKAY,
Y., WATANABE, M., WATANABE, T., SATO, S., NAITO, S., KUMAMOTO, K.
and EYA, S., (1985) “Dynamic bearing capacity, wave theory pile driving control”,
Proceedings, Int. Symposium on Penetrability and Drivability of Piles, San Francisco,
vol. 1, pp. 201-204.
WHITAKER, T. and COOKE, R.W., (1961) “A new approach to pile testing”,
Proceedings, 5 th. ICSMFE, Paris, vol. 2, pp. 171-176.
WHITAKER, T., (1970) “The design of piled foundations”, Pergamon Press Limited,
1ª edição, Oxford.
VARGAS, M., (1977) “Introdução à Mecânica dos Solos”, McGraw-Hill do Brasil,
São Paulo.
VELLOSO, D.A., (1990) “A qualidade de um projeto de fundações”, 1º Simpósio
Sobre Qualidade e Produtividade na Construção Civil – FAAP – São Paulo.

122
VELLOSO, D.A. e LOPES, F.R., (2002), “Fundações”, vol. 2, Editora COPPE-UFRJ,
Rio de Janeiro.
Related Documents











