República bolivariana de Venezuela Ministerio de Educación Superior Instituto Universitario Politécnico Santiago Mariño Maturín, Estado Monagas Datos: Yorman Godoy CI: 19.270.788 1 Controladores y Acciones de control

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
República bolivariana de Venezuela
Ministerio de Educación Superior
Instituto Universitario Politécnico Santiago Mariño
Maturín, Estado Monagas
Datos:
Yorman Godoy CI: 19.270.788
Ing. Electrónica (44)
Julio de 2014
1
Controladores y
Acciones de control

Índice
Introducción. 3
Esquemas de un sistema de control. 4
Control por realimentación. 4 Control de adelanto. 4 Control de relación. 4 Control en Cascada. 5 Control Predominante. 5 Control Adaptativo. 6
Definición de controlador. 7
Compensación de adelanto y en atraso. 7
Tipos de controladores. 8
Controlador on-off. 8 Controlador proporcional (P). 8 Proporcional-Integral (PI). 9 Proporcional-Derivativo (PD). 10 Proporcional Integral Derivativo (PID). 11
Conclusiones. 12
Introducción
2

Con la finalidad de comprender los diversos procesos y procedimientos de
control de procesos bien sea de una planta industrial o un simple
electrodoméstico, es necesario entender el principio de funcionamiento de los
controladores y las diversas técnicas utilizadas para controlar dichos procesos.
A continuación se estará presentando un trabajo escrito en el cual se resalta
principalmente los controladores de procesos, los métodos de control que estos
utilizan junto con su expresión matemática, además se habla sobre los
esquemas de un sistema de control y un breve resumen de cómo se
representan gráficamente cada uno de estos y en qué tipo de proceso se
utilizaría normalmente.
Esquemas de un sistema de control
3
Control por realimentación
El control por realimentación (feedback) constituye la infraestructura básica de casi todos los esquemas de control de procesos, corrigiendo las perturbaciones.
El control por realimentación mide la variable de proceso, la compara con el punto de ajuste y manipula la salida en la dirección en que debe moverse el proceso para alcanzar el punto de ajuste.
Control de adelanto
El control adelantado (feedforward) es una estrategia usada para compensar los disturbios en un sistema, antes que afecten la variable controlada. La idea es medir el disturbio, predecir el efecto en el proceso y aplicar la acción correctiva correspondiente. Usualmente se usa este esquema de control en combinación con el control por realimentación (feedback).
Control de relación
El control de relación asegura que dos o más flujos se mantengan en la misma relación aunque estos cambien. Se usa para obtener mezclas con una composición o propiedades físicas específicas, para mezclas aire/combustible.
El flujo controlado equivale al flujo medido por el FT101 por algún valor previamente ajustado en FF102. Si la característica física (densidad, viscosidad, etc.) es medida, un controlador PID puede ser usado para manipular la válvula de relación.
4

Control en Cascada
El controlador en cascada usa la salida del controlador primario para manipular el punto de ajuste del controlador secundario. Este sistema se compone de dos estructuras de control por realimentación.
El lazo secundario debe tener influencia sobre el primario y, la dinámica del proceso de este lazo deber ser más rápida que la del primero (por ejemplo flujo y temperatura). Este esquema de control permite una respuesta rápida de control y manipular independientemente los dos lazos si se requiere.
Control Predominante
El control predominante (override), permite seleccionar entre dos o más controladores, la salida que actuará sobre el elemento final de control, dependiendo de la importancia que se le dé a cada variable en el sistema. La realimentación externa evita que se salgan de control cualquiera de las dos variables.
5

Control Adaptativo
El control adaptativo es un sistema del cual se espera se adapte a los cambios en la dinámica del proceso. Es un tipo de control para procesos no lineales y cambiantes en el tiempo (envejecimiento del sistema, perturbaciones, etc.).
El Control adaptativo puede lograrse mediante:
Sistemas Auto-Ajustables. Sistemas Adaptativos con Modelo de Referencia
La técnica de los sistemas autoajustables parte del conocimiento del modelo del proceso y se basa en disponer de un método válido de identificación en línea, se asume que existe una separación entre las tareas de identificación y control. Se dispone de un sistema en paralelo al control, que se encarga de calcular continuamente los valores óptimos de sintonización del controlador.
Los Sistemas Adaptativos con Modelo de Referencia se basan en un concepto simple: se desea que el comportamiento del proceso sea idéntico al de un modelo que se da como referencia. Si existe diferencia entre el desempeño actual del proceso con el modelo, un mecanismo de adaptación ajusta los parámetros del controlador.
6

Aplicaciones prácticas del control adaptativo son el control de velocidad de un vehículo y el control de un péndulo invertido (un cohete sobre la plataforma de transporte a su base de lanzamiento) entre muchos otros.
Definición de controlador
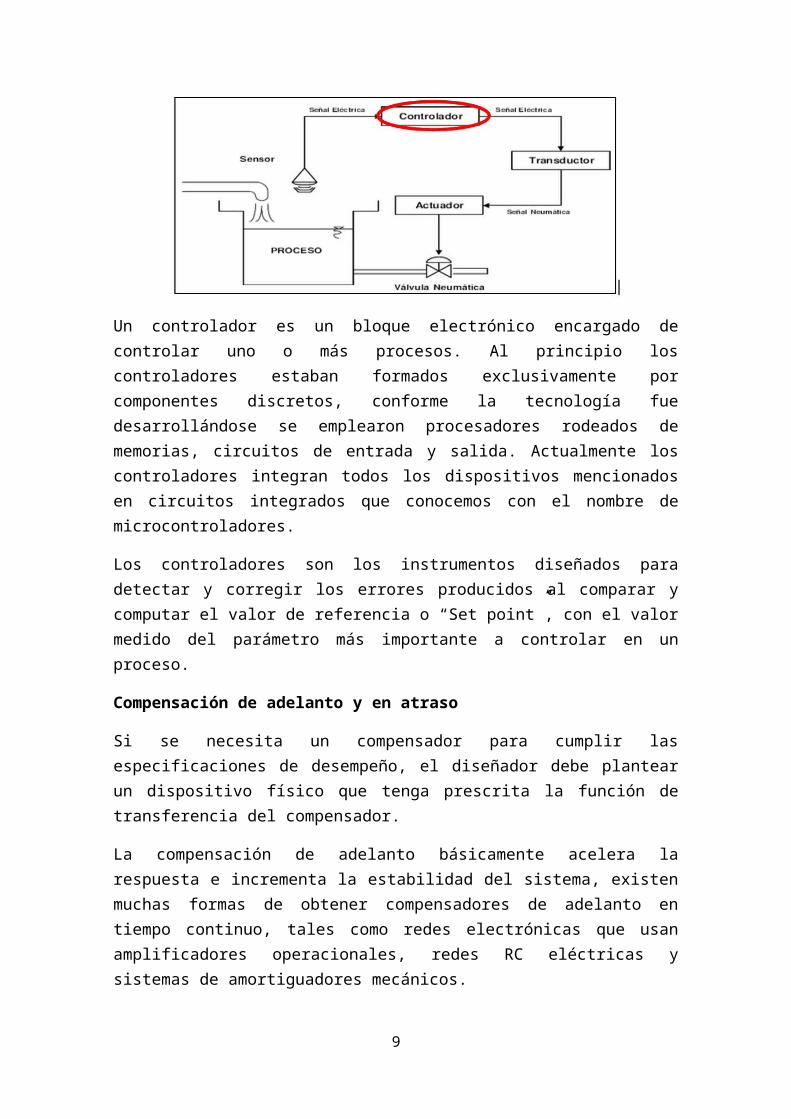
El controlador es una componente del sistema de control que detecta los desvíos existentes entre el valor medido por un sensor y el valor deseado o “set point”, programado por un operador; emitiendo una señal de corrección hacia el actuador como se observa en la siguiente figura:
Un controlador es un bloque electrónico encargado de controlar uno o más procesos. Al principio los controladores estaban formados exclusivamente por componentes discretos, conforme la tecnología fue desarrollándose se emplearon procesadores rodeados de memorias, circuitos de entrada y salida. Actualmente los controladores integran todos los dispositivos mencionados en circuitos integrados que conocemos con el nombre de microcontroladores.
Los controladores son los instrumentos diseñados para detectar y corregir los errores producidos al comparar y computar el valor de referencia o “Set point”, con el valor medido del parámetro más importante a controlar en un proceso.
Compensación de adelanto y en atraso
Si se necesita un compensador para cumplir las especificaciones de desempeño, el diseñador debe plantear un dispositivo físico que tenga prescrita la función de transferencia del compensador.
7

La compensación de adelanto básicamente acelera la respuesta e incrementa la estabilidad del sistema, existen muchas formas de obtener compensadores de adelanto en tiempo continuo, tales como redes electrónicas que usan amplificadores operacionales, redes RC eléctricas y sistemas de amortiguadores mecánicos.
Mientras que la compensación en atraso es todo lo contrario, es decir, básicamente desacelera la respuesta de la variable que se esté controlando y disminuye la estabilidad del sistema, lo que conlleva a que la señal de salida no sea estable.
La siguiente figura muestra un circuito electrónico que usa amplificadores operacionales que consiste en una red de adelanto si R1C1>R2C2 y en una red de atraso si R1C1<R2C2.
Tipos de controladores
Controlador on-off
El controlador on-off, o también llamado todo-nada o abierto-cerrado, es la forma más simple de control por realimentación, es un control de dos posiciones en el que el elemento final de control sólo ocupa una de las dos posibles posiciones, en la cual una de las salidas del controlador va de un extremo a otro cuando el valor de la variable se desvía al valor deseado.
Este controlador solo tiene dos posiciones para actuar: encendido (100%) o apagado (0%). La lógica de funcionamiento es tener un punto de referencia, si la variable es mayor el actuador sume una posición, si la variable es menor el actuador sume la otra posición.
Controlador proporcional (P)
Un sistema de control proporcional es un tipo de sistema de control de realimentación lineal.
El sistema de control proporcional es más complejo que un sistema de control encendido/apagado como por ejemplo un termostato interno bi-metálico, pero más sencillo que un sistema de control proporcional-integral-derivativo (PID)
8
que se puede utilizar para controlar la velocidad de crucero de un automóvil. El sistema de control tipo encendido/apagado será adecuado en situaciones donde el sistema en general tiene un tiempo de respuesta relativamente largo, pero dará lugar a un comportamiento inestable si el sistema que está siendo controlado tiene un tiempo de respuesta breve. El control proporcional resuelve este problema de comportamiento mediante la modulación de la salida del dispositivo de control, como por ejemplo con una válvula cuyo paso se varía en forma continua.
Expresión matemática para el controlador proporcional:
Pout=K p e(t )
Dónde:
Pout: Salida del controlador proporcional
Kp: Ganancia proporcional
e(t): Error de proceso instantáneo en el tiempo t. e(t)=SP - PV
SP: Punto establecido
PV: Proceso variable
Proporcional-Integral (PI)
En la práctica no existen controladores que tengan sólo acción integral sino que llevan combinada una acción proporcional. Estas dos acciones se complementan. La primera en actuar es la acción proporcional (instantáneamente) mientras que la integral actúa durante un intervalo de tiempo. Así y por medio de la acción integral se elimina la desviación remanente (proporcional).
Expresión matemática para el controlador proporcional-Integral (PI):
Y ( t )=K p e ( t )+K p
T i∫0
t
e ( t )dt
Donde Kp y Ti son parámetros ajustables del sistema. A Ti se le denomina tiempo integral y controla la acción integral del sistema, mientras que Kp
controla ambas. Si Ti es muy grande la pendiente de la rampa, correspondiente al efecto integral será pequeña y, por tanto, el efecto de esta acción suave, y viceversa. A Ti se le llama también tiempo de duplicación ya que es el tiempo que tarda la acción integral en igualar a la acción proporcional ante un error de tipo escalón.
9

Ejemplos de acción de control para los controladores PI:
Si aplicamos un control proporcional- integral para controlar el posicionamiento de un brazo robot de una cadena de montaje, al recibir una señal de error para desplazar el brazo un centímetro en el eje X, se produce un desplazamiento brusco provocado por el control proporcional que lo acercará, con mayor o menor precisión al punto deseado y, posteriormente, el control integral continuará con el control del brazo hasta posicionarlo el punto exacto, momento en el que desaparecerá totalmente la señal de error y, por tanto, eliminando totalmente el posible error remanente del sistema.
Proporcional-Derivativo (PD).
Esta acción al igual que la integral no se emplea sola, sino que va unida a la acción proporcional (PD).
En el control proporcional y derivativo PD, la salida del bloque de control responde a la siguiente ecuación:
Y (t )=K p e ( t )+K pT dde (t)dt
Donde Kp y Td son parámetros ajustables del sistema. A Td se le denomina tiempo derivativo o de adelanto y controla la acción derivativa del sistema (es una medida de la rapidez con que compensa un controlador PD un cambio en la variable regulada, comparado con un controlador P puro), mientras que Kp
controla ambas acciones. A Td se le llama también tiempo de duplicación ya que es el tiempo que tarda la acción proporcional en igualar el efecto de la acción derivativa ante una señal de error de tipo rampa.
En este tipo de controladores, debemos tener en cuenta que la derivada de una constante es cero y, por tanto, en estos casos, el control derivativo no ejerce ningún efecto, siendo únicamente útil en los casos en los que la señal de error varía en el tiempo de forma continua.
Por tanto, el análisis de este controlador ante una señal de error de tipo escalón no tiene sentido y, por ello, se ha representado la salida del controlador en función de una señal de entrada en forma de rampa unitaria.
Ejemplos de acción de control para los controladores PD:
Si durante la conducción de un automóvil, de repente, se produce alguna situación anómala (como un obstáculo imprevisto en la carretera, u otro vehículo que invade parcialmente nuestra calzada), de forma involuntaria, el cerebro envía una respuesta casi instantánea a las piernas y brazos, de forma que se corrija velocidad y dirección de nuestro vehículo para sortear el
10

obstáculo. Si el tiempo de actuación es muy corto, el cerebro tiene que actuar muy rápidamente (control derivativo) y, por tanto, la precisión en la maniobra es muy escasa, lo que derivará a efectuar movimientos muy bruscos de forma oscilatoria. Estos movimientos bruscos pueden ser causa un accidente de tráfico. En este caso, el tiempo de respuesta y la experiencia en la conducción (ajuste del controlador derivativo) harán que el control derivativo producido por el cerebro del conductor sea o no efectivo.
El controlador PD se utiliza poco, debido a que no puede compensar completamente las desviaciones remanentes del sistema y si la componente D es un poco grande, lleva rápidamente a la inestabilidad del bucle de regulación.
Proporcional Integral Derivativo (PID).
Aprovecha las características de los tres reguladores anteriores, de forma, que si la señal de error varía lentamente en el tiempo, predomina la acción proporcional e integral y, si la señal de error varía rápidamente, predomina la acción derivativa. Tiene la ventaja de tener una respuesta más rápida y una inmediata compensación de la señal de error en el caso de cambios o perturbaciones. Tiene como desventaja que el bucle de regulación es más propenso a oscilar y los ajustes son más difíciles de realizar.
La salida del regulador viene dada por la siguiente ecuación:
Y ( t )=K p e ( t )+K p
T i∫0
t
e ( t )dt+K pT dde (t)dt
Donde Kp, Ti y Ti son parámetros ajustables del sistema.
Ejemplos de acción de control para los controladores PID:
Como ejemplo de un sistema de control PID, podemos poner la conducción de un automóvil. Cuando el cerebro da una orden de cambio de dirección, en una maniobra normal, la acción de control predominante del sistema es la proporcional, que aproximará la dirección al punto deseado de forma más o menos precisa. Una vez que la dirección esté cerca del punto deseado, comenzará la acción integral que eliminará el posible error producido por el control proporcional, hasta posicionar el volante en el punto preciso. Si la maniobra es lenta, la acción derivativa no tendrá apenas efecto. Si la maniobra requiere mayor velocidad de actuación, la acción de control derivativo adquirirá mayor importancia, aumentando la velocidad de respuesta inicial del sistema y posteriormente actuará la acción proporcional y finalmente la integral. En el caso de una maniobra muy brusca, el control derivativo tomará máxima relevancia, quedando casi sin efecto la acción proporcional e integral, lo que provocará muy poca precisión en la maniobra.
11
Conclusiones
Los controladores son una herramienta importante para el control de
procesos y/o variables de una actividad la cual lo requiera.
Cabe destacar que un controlador puede ser tan simple como un flotador
con una válvula o tan complejo como para integrar un sistema ESCADA
y/o un PLC.
Debido a el avance tecnológico hoy día podemos tener acceso a
controladores cuyo funcionamiento se basa principalmente a un principio
lógico, es decir, mayormente controladores digitales.
En función del tipo de control que se requiere es necesario utilizar un
método o modelo de control el cual se ajuste a las diversas actividades
que comprenden un proceso, esto quiere decir que de acuerdo al tipo de
actividad podemos escoger uno a mas modelos de control bien sea
control de adelanto, relación, cascada, entre otros.
12
Related Documents