Simulating PX4 Flight Control with ROS/Gazebo Thomas Gubler

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Simulating PX4 Flight Control with ROS/Gazebo
Thomas Gubler

PX4 Flight Control
Onboard Messaging - uORB
DriversPX4 Flight Control
Onboard Messaging - uORB
Drivers
NuttX

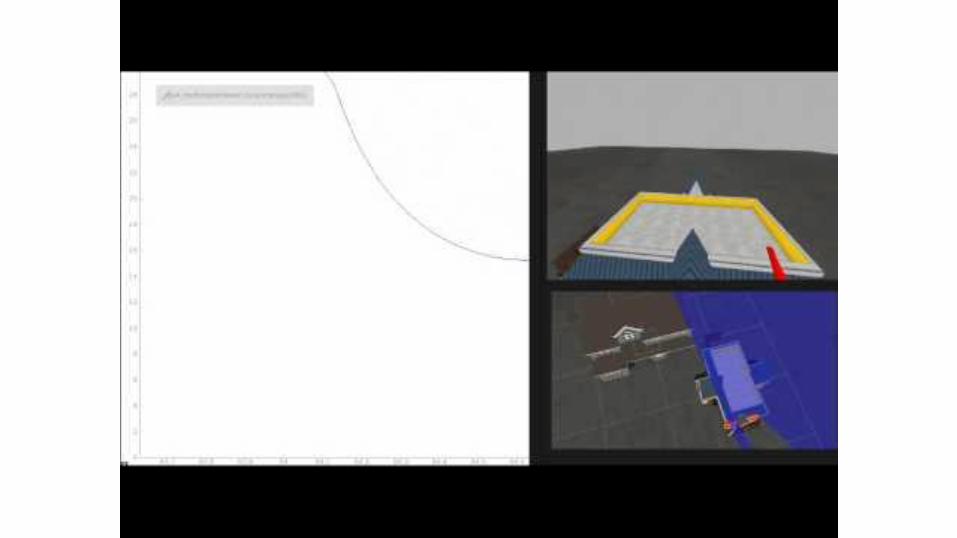
Simulate what you fly
Simulate whole robot
Fly what you simulate(d)


PX4 Flight Control
Linux
ROS / Messaging
Gazebo PluginsMessaging Abstraction
Layer

PX4 Flight Control
Onboard Messaging - uORB
Drivers
Onboard Messaging - uORB
NuttX
Messaging Abstraction Layer
DriversPX4 Flight Control
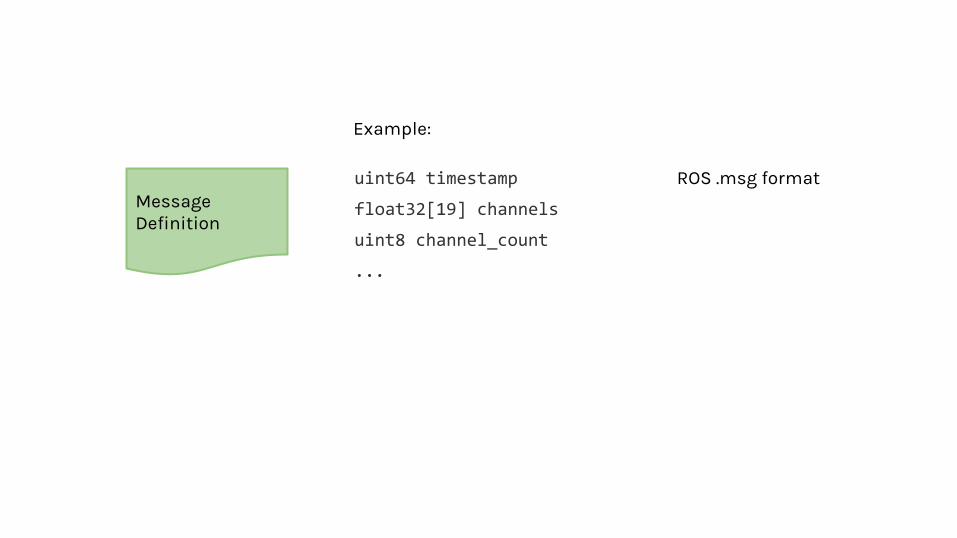
Message Definition
uint64 timestamp
float32[19] channels
uint8 channel_count
...
ROS .msg format
Example:

Publisher<px4_rc_channels> rc_channels_pub;
px4_rc_channels rc_channels_msg;
// Fill message with data here
// Publish
_rc_channels_pub.publish(rc_channels_msg);
// Callback
void rc_channels_callback_function(const px4_rc_channels &msg) {
PX4_INFO("I heard: [%llu]", msg.data().timestamp);
}
// Subscribe
_n.subscribe<px4_rc_channels>(rc_channels_callback_function, 10);
Publish
Receive
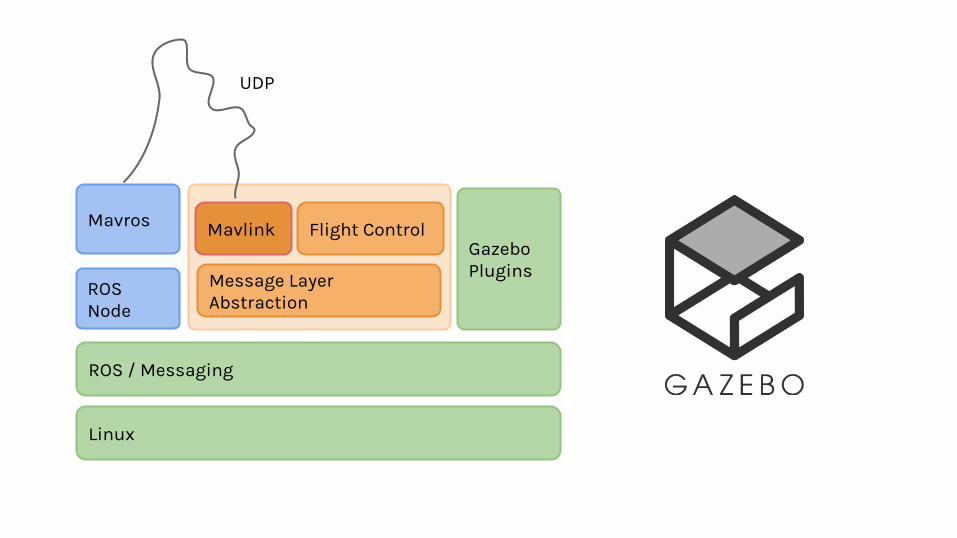
Linux
ROS / Messaging
Gazebo PluginsMessage Layer
AbstractionROSNode
UDP
Mavros Mavlink Flight Control

PX4 Flight Control
Onboard Messaging - uORB
Drivers
Onboard Messaging - uORB
Drivers
NuttX
Message Layer Abstraction
Flight Control
serial
Mavlink
Linux
ROS / Messaging
Custom
ROS
Nodes Mavros

Future
Port all PX4 modules
Experiment with mobility
Robotic applications
Try it yourself: Tutorial on px4.io

px4.io
thomasgubler.com
Image Sources:
px4.io, gazebosim.org, ros.org, ASL ETHZ, Intel
Thanks to:
UAVentureCVG ETH ZurichASL ETH Zurich
PX4 Community
Related Documents











