____________ American Institute of Aeronautics and Astronautics 1 Control Issues in Reduced-Order Feedback Flow Control Kelly Cohen * , Stefan Siegel ** and Thomas McLaughlin † U.S. Air Force Academy, Department of Aeronautics Colorado Springs, CO 80840 Abstract Technological advances in sensors, actuators, on-board computational capability, modeling and control sciences have offered a possibility of seriously considering closed-loop flow control for practical applications. We can now attempt to address problems that have over the years not been effectively been solved using passive means and /or open-loop techniques. The main strategies to closed-loop control are a model-independent approach, a full-order optimal control approach based on the Navier Stokes solution and a reduced order model strategy. The current effort emphasizes methodology based on low-dimensional, proper orthogonal decomposition applied to the suppression of periodic vortex shedding in the wake of a circular cylinder. Focus is on the validity of the low-dimensional model, selection of the important modes that need representation, incorporation of an ensemble of snapshots that reflect vital transient phenomena, selection of sensor placement and number, and linear stochastic estimation for mapping of sensor data onto modal information. Furthermore, additional issues surveyed include observability, controllability and stability of the closed-loop systems based on low-dimensional models. Examples based on computational and experimental studies on the cylinder wake benchmark are presented to illuminate some of the important issues. We achieved a drag reduction of close to 90% of the vortex-induced drag, and lowered the unsteady lift force by the same amount. Finally, the paper summarizes some of the important lessons learned and notes on open issues for future research. Nomenclature a n (t) Time dependent coefficient, of nth mode, of the low-dimensional model b n Coefficients associated with the control input, of nth mode, of low-dimensional model C n s Coefficients of the linear stochastic estimator C d Mean drag coefficient C d = F D / .5 ρ U ∞ 2 .D D Cylinder Diameter d Maximum displacement of the sinusoidal forcing of the cylinder F N Vortex shedding natural frequency f Forcing frequency of the active controller f a Feedback control input to the cylinder g k Quadratic nonlinear function used in low-dimensional, time-depending model Re Reynolds number Re = U ∞ D / υ u s Sensor measurement of stream-wise velocity ) t , y , x ( u ~ Velocity field ) y , x ( U Mean flow U ∞ Freestream velocity u (x, y, t) Fluctuating velocity component x, y Spatial coordinates φ (x, y) Spatial eigenfunction * Visiting Researcher, Member AIAA ** Assistant Research Associate, Member AIAA † Research Associate, Associate Fellow AIAA 42nd AIAA Aerospace Sciences Meeting and Exhibit 5 - 8 January 2004, Reno, Nevada AIAA 2004-575 This material is declared a work of the U.S. Government and is not subject to copyright protection in the United States. Downloaded by UNIVERSITY OF CINCINNATI on November 24, 2014 | http://arc.aiaa.org | DOI: 10.2514/6.2004-575

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

____________ American Institute of Aeronautics and Astronautics
1
Control Issues in Reduced-Order Feedback Flow Control
Kelly Cohen*, Stefan Siegel** and Thomas McLaughlin† U.S. Air Force Academy, Department of Aeronautics
Colorado Springs, CO 80840
Abstract Technological advances in sensors, actuators, on-board computational capability, modeling and control sciences have offered a possibility of seriously considering closed-loop flow control for practical applications. We can now attempt to address problems that have over the years not been effectively been solved using passive means and /or open-loop techniques. The main strategies to closed-loop control are a model-independent approach, a full-order optimal control approach based on the Navier Stokes solution and a reduced order model strategy. The current effort emphasizes methodology based on low-dimensional, proper orthogonal decomposition applied to the suppression of periodic vortex shedding in the wake of a circular cylinder. Focus is on the validity of the low-dimensional model, selection of the important modes that need representation, incorporation of an ensemble of snapshots that reflect vital transient phenomena, selection of sensor placement and number, and linear stochastic estimation for mapping of sensor data onto modal information. Furthermore, additional issues surveyed include observability, controllability and stability of the closed-loop systems based on low-dimensional models. Examples based on computational and experimental studies on the cylinder wake benchmark are presented to illuminate some of the important issues. We achieved a drag reduction of close to 90% of the vortex-induced drag, and lowered the unsteady lift force by the same amount. Finally, the paper summarizes some of the important lessons learned and notes on open issues for future research.
Nomenclature
an (t) Time dependent coefficient, of nth mode, of the low-dimensional model
bn Coefficients associated with the control input, of nth mode, of low-dimensional model Cn
s Coefficients of the linear stochastic estimator Cd Mean drag coefficient Cd = FD / .5 ρ U∞
2 .D D Cylinder Diameter d Maximum displacement of the sinusoidal forcing of the cylinder
FN Vortex shedding natural frequency f Forcing frequency of the active controller fa Feedback control input to the cylinder gk Quadratic nonlinear function used in low-dimensional, time-depending model Re Reynolds number Re = U∞ D / υ us Sensor measurement of stream-wise velocity
)t,y,x(u~ Velocity field
)y,x(U Mean flow U∞ Freestream velocity
u (x, y, t) Fluctuating velocity component x, y Spatial coordinates
φ (x, y) Spatial eigenfunction
* Visiting Researcher, Member AIAA
** Assistant Research Associate, Member AIAA
† Research Associate, Associate Fellow AIAA
42nd AIAA Aerospace Sciences Meeting and Exhibit5 - 8 January 2004, Reno, Nevada
AIAA 2004-575
This material is declared a work of the U.S. Government and is not subject to copyright protection in the United States.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
004-
575

____________ American Institute of Aeronautics and Astronautics
2
1. Introduction
The main idea of flow control is the alternation of aerodynamic characteristics of air vehicles and munitions enabling augmented mission performance. Flow control can either be passive or active depending on whether energy is added to the flow. Furthermore, active flow control may be characterized by open-loop or closed-loop techniques. Gad-el-Hak1 provides an insight into the advances in the field of flow control. Research into closed-loop flow control methods has increased over the past two decades. Cattafesta et al2 provide a useful classification of active flow control and describes the main components of a feedback control system. Before proceeding into the details of modeling and control, it is imperative to appreciate the reasons as to why closed-loop control is of consequence and the main advantages associated with its implementation in flow control applications. It is advantageous to opt for closed-loop flow control for it:
• Enables addressing problems that have over the years not been solved using passive means and /or open-loop techniques.
• Provides performance augmentation of an open-loop flow control system.
• Lowers the amount of energy required to manipulate the flow to induce the desired behavior. This aspect affects actuation requirements and may be a deciding factor as control authority is always limited.
• Enables adaptability to a wider operating envelope, thereby limiting the performance reduction associated with multiple design working points.
• Provides design flexibility and robustness.
Several applications of closed-loop control have been reported in the literature. Specific areas of interest include flow-induced cavity resonance,2-3 vectoring control of a turbulent jet,4 separation control of the NASA Langley Hump model (a variation on the Glauert Glas II airfoil)5 control of the vortex motion in the combustion recirculation region6 and control of vortex shedding in circular cylinder wakes7-8. This paper reflects on various observations made within the framework of the cylinder wake benchmark, closed-loop control program at the United States Air Force Academy9-15.
The paper is organized as follows: Section 2 provides an overview on the problem of vortex shedding in a cylinder wake and a survey of the main approaches
for closed-loop flow control. The modeling aspects are presented in Section 3, and the observer and controller design approaches are described in Sections 4 and 5 respectively. Lessons learned from CFD simulations and water tunnel experiments are discussed. A survey of the open issues and challenges is then provided in Section 6.
2. Basic Approaches to 2-D Cylinder Wake
Let us consider the unsteady nature of the cylinder wake problem to illustrate the three basic approaches illustrated in Fig. 1. In a two-dimensional cylinder wake, self-excited oscillations in the form of periodic shedding of vortices are observed above a critical Reynolds number of around 50.16 This behavior is referred to as the von Kármán Vortex Street,17 where flow-induced non-linear oscillations lead to undesirable effects associated with unsteady pressures such as fluid-structure interactions due to lift/drag fluctuations.17 This problem is of practical importance because, particularly at higher Reynolds numbers, vortex shedding is associated with strong periodic transverse forces that can damage structures.17 Also, the wake vortices greatly increase the drag of a bluff body, compared to the steady wake that can be observed at lower Reynolds numbers (Re). Monkewitz18 showed that the von Kármán Vortex Street is the result of an absolute, global instability in the near wake of the bluff body. Further downstream the flow turns convectively unstable. For these detrimental reasons many attempts to improve the unsteady vortex street have been made. When active open loop forcing of the wake is employed, the vortices in the wake can be "locked" at the forcing signal. This also strengthens the vortices and consequently increases the drag. The cylinder wake may be controlled by forcing the flow. Open loop forcing has been successfully employed to delay boundary layer transition.7 However, Gillies7 argues that the control of global flow oscillations that are the result of absolute instability is more cumbersome. An effective way of suppressing the self-excited flow oscillations, without making changes to the geometry, is by the incorporation of active closed-loop flow control.7 A closed-loop flow control system is comprised of an actuator (or set of actuators) that introduces a perturbation into the flow, to obtain desired performance. Furthermore, the controller acts upon information provided by a set of sensors. The basic closed-loop control strategies are presented in Fig.1.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
004-
575
____________ American Institute of Aeronautics and Astronautics
3
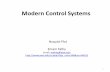
Modeling Wake Dynamics for Controller design
Model IndependentApproach
Direct Navier StokesApproach
Low-Dimensional Approach
• Simple to implement experimentally
• Works for a limited number of applications
• Ideal control approach, complete set of equations
• Computationally intensive
• Can be implemented in restricted cases
• Recent developments in effective low-dimensional models
• Can be implemented with relative ease
•Model building is challenging
Fig. 1: Approaches to Closed-Loop Flow Control Model Independent Approach - involves the introduction of sensors in the wake and using a control law (usually linear) which produces a command to the actuator that forces the flow. The advantages of this approach17 are: • No model of the flow field is required for
controller design, • Direct feedback eliminates the need for a state
estimator, • A simple control law may be implemented in an
experimental set up with relative ease. Experimental studies show that a linear proportional feedback control based on a single sensor feedback is able to delay the onset of the wake instability, rendering the wake stable at Re about 20% higher than the unforced case. Above Re = 60, a single-sensor feedback may suppress the original mode but destabilizes one of the other modes17. This approach is relatively simple to implement experimentally. However, the results are very limited for the challenging problem of an absolutely unstable wake. Direct Navier Stokes Approach – This approach is more structured as it applies conventional and proven model-based control strategies such as optimal control theory for flow control problems. Abergel and Temam19 developed conditions for optimality for a few simple applications. However, real time implementation of this approach to the cumbersome unsteady Navier-Stokes equations is not practical. Low-Dimensional Approach - Low-dimensional modeling is a vital building block when it comes to realizing a structured model-based closed-loop strategy for flow control. For control purposes, a practical procedure is needed to break down the velocity field, governed by Navier Stokes partial
differential equations, by separating space and time. A common method used to substantially reduce the order of the model is proper orthogonal decomposition (POD).20 This method is an optimal approach in that it will capture a larger amount of the flow energy in the fewest modes of any decomposition of the flow. The POD method may be used to identify the characteristic features, or modes, of a cylinder wake as demonstrated by Gillies.7
The major building blocks of this structured approach are comprised of a reduced-order POD model, a state estimator and a controller.7 The desired POD model contains an adequate number of modes to enable reasonable modeling of the temporal and spatial characteristics of the large scale, coherent structures, inherent in the flow. Further details of the POD method may be found in the book by Holmes, Lumley, and Berkooz.20 A common approach referred to as the method of “snapshots” introduced by Sirovich21 is employed to generate the basis functions of the POD spatial modes from flow-field information obtained using either experiments or numerical simulations. This approach to the modeling of the global wake behavior behind a circular cylinder was effectively employed by Gillies7 and is also the approach followed in this research effort.
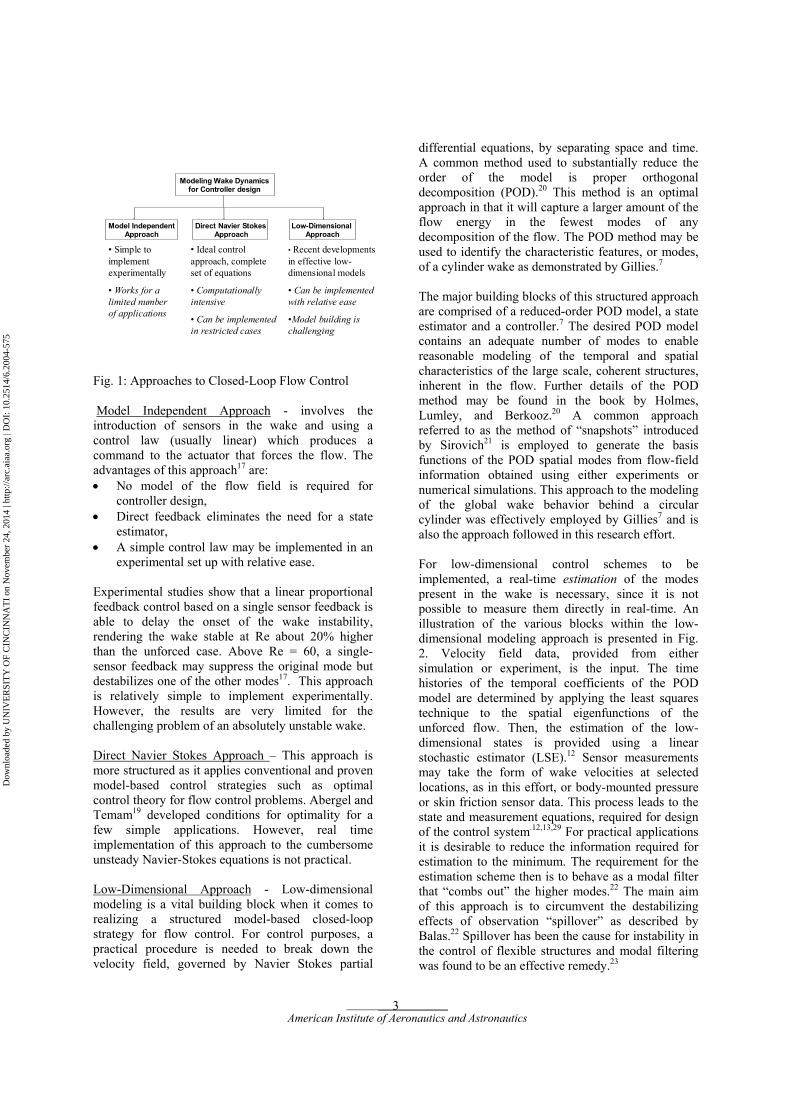
For low-dimensional control schemes to be implemented, a real-time estimation of the modes present in the wake is necessary, since it is not possible to measure them directly in real-time. An illustration of the various blocks within the low-dimensional modeling approach is presented in Fig. 2. Velocity field data, provided from either simulation or experiment, is the input. The time histories of the temporal coefficients of the POD model are determined by applying the least squares technique to the spatial eigenfunctions of the unforced flow. Then, the estimation of the low-dimensional states is provided using a linear stochastic estimator (LSE).12 Sensor measurements may take the form of wake velocities at selected locations, as in this effort, or body-mounted pressure or skin friction sensor data. This process leads to the state and measurement equations, required for design of the control system.12,13,29 For practical applications it is desirable to reduce the information required for estimation to the minimum. The requirement for the estimation scheme then is to behave as a modal filter that “combs out” the higher modes.22 The main aim of this approach is to circumvent the destabilizing effects of observation “spillover” as described by Balas.22 Spillover has been the cause for instability in the control of flexible structures and modal filtering was found to be an effective remedy.23
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
004-
575
____________ American Institute of Aeronautics and Astronautics
4
Fig. 2: Low-Dimensional Modeling Strategy
The intention of the proposed strategy is that the signals, provided by a certain configuration of sensors placed in the wake, are processed by the estimator to provide estimates of the first two modes. The estimation scheme, based on the linear stochastic estimation procedure introduced by Adrian,24 predicts the temporal amplitudes of the first two POD modes from a finite set of measurements obtained from either computational or experimental data. A major design challenge lies in finding a minimum number of sensors and their locations that will suffice to enable the desired modal filtering.
3. Low-Dimensional Modeling
Feasible real time estimation and control of the cylinder wake may be effectively realized by reducing the model complexity of the cylinder wake as described by the Navier-Stokes equations, using POD techniques. POD, a non-linear model reduction approach is referred to in the literature as the Karhunen-Loeve expansion.6 The desired POD model will contain an adequate number of modes to enable modeling of the temporal and spatial characteristics of the large-scale coherent structures inherent in the flow, but no more modes than necessary to provide the necessary closed-loop perfromance.
The basis functions of the POD spatial modes may be obtained from the numerical solution of the Navier-Stokes equations using CFD simulations or by incorporating experimental data. For control design purposes, the POD method enables the Navier-Stokes equations to be modeled as a set of ordinary differential equations (O.D.E.). The decomposition of
each of the components of the velocity field is as follows: ),,(),(),,(~ tyxuyxUtyxu += (1) where U[m/s] denotes the mean flow and u[m/s] is the fluctuating component that may be expanded as:
∑=
=n
k
kik yxtatyxu
1
)( ),()(),,( φ (2)
where ak(t) denotes the time-dependent coefficients and φ i(x,y) represents the non-dimensional spatial eigenfunctions determined from the POD procedure. In some cases the velocity component may be replaced by the out of plane vorticity, which is calculated from the flow field. Next, the empirical correlation matrix is computed.20
In this effort, the correlation matrix is computed using the inner product.19 Solving the eigenvalue problem, the eigenvalues and the orthogonal spatial eigenfunctions, φ i(x,y) are obtained. Since the eigenvalues measure the relative energy of the system dynamics contained in that particular mode, they may be normalized to correspond to a percentage. Finally, the time histories of the temporal coefficients of the POD model, ak(t), are determined using the extracted spatial modes and the data of the unforced flow. For an arbitrarily forced circular cylinder, we can write the low-dimensional wake model, based on "n" truncated modes as:
aknkk fbag
dtda
+= )( (3)
where gk, for the k th mode, is a quadratic non-linear function of the time-dependent mode coefficients. The term bk refers to the coefficients associated with the control input and fa is the feedback control input to the cylinder. For the open-loop case; fa = 0. For a full state feedback system, the closed loop control input, fa, is a function of ak.15 However, it is not possible to obtain a direct measurement of ak. An essential aspect of reduced order modeling concerns truncation. How many modes are required and what are the criteria for effective truncation? Answers to this question has been partially addressed by Cohen et al.15 This effort showed that control of the POD model of the von Kármán vortex street in the wake of a circular cylinder at Re = 100 is enabled using just the first mode.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
004-
575

____________ American Institute of Aeronautics and Astronautics
5
Frequency
Ampl
itude
Lock - in
No Lock-in
(a)
(b)
No Lock-in
Fig. 3: Lock-in Regime of Cylinder at Re = 100, Non-dimensional Forcing Frequency versus Amplitude
Superimposed Flow-Viz (a) Re = 160, f/FN =0.8, d/D=0.25; (b) Re = 160, f/FN =1.2, d/D=0.25
Furthermore, feedback based on the first mode alone suppressed the next three modes in the POD model. At this point, it is imperative to note the difference between the number of modes required to reconstruct the flow and the number of modes required for effective low-dimensional modeling for controller design. For real-time control, we are interested in estimating only those modes required for closed-loop control. On the other hand, an accurate reconstruction of the velocity field based on a low-dimensional model may be obtained using four-eight modes. A very important lesson learned concerns the validity of the low-dimensional model, regarding the operating envelope where the model is valid. The cylinder wake flow can be forced in an open loop fashion using sinusoidal cross-flow displacement of the cylinder with a given amplitude and frequency. Koopman25 investigated the change in the wake pattern along the span of a vibrating body in a wind tunnel experiment. He found that the motion of the trailing edge appeared to organize the phase of the fluctuating wake over a greater length of the span. The phenomena, referred to as "locking-in", also controlled the frequency of the oscillating wake over a limited range.25 The frequency band around the natural vortex shedding frequency for which lock-in may be achieved is amplitude dependent, as shown in
Fig. 3. Inside the V-shaped area (shaded region in Fig.3), the shedding frequency is identical to the driving frequency. In general, the larger the amplitude, the larger the frequency band for which lock-in is possible. However, the threshold amplitude exists below which the flow will not respond to the forcing. In Koopman’s experiment, the threshold amplitude was 10% peak displacement of the cylinder. Shifting the forcing frequency away from the natural shedding frequency yields a qualitatively different behavior. Outside the V-shaped are, the vortex street becomes unlocked and the response to the forcing exhibits complex three dimensional patterns.25 We were able to verify this behavior experimentally in the water tunnel as shown in Fig. 3. In addition to the lock-in envelope, Fig. 3 also contains two flow-viz photographs superimposed on it. The purpose of the flow-viz is to provide an insight into the coherent structure of the lock-in wake as opposed to the complex nature of the flow when there is no lock-in. Note that the open loop forcing results have important implications for the closed loop feedback control effort. Since our POD model is based on unforced flow field data, it can only capture flow behavior that possesses similar phenomenology when compared to the unforced wake.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
004-
575
____________ American Institute of Aeronautics and Astronautics
6
3 3.5 4 4.5 5 5.5 6 6.5 7-40
-30
-20
-10
0
10
20
30
40Time Coefficients during Ramped Open-Loop Forcing
Time [s]
Tim
e C
oeffc
ient
s
Mean Flow Mode, a1
Transient Mode, a4
Kármán Modes, a3,a4
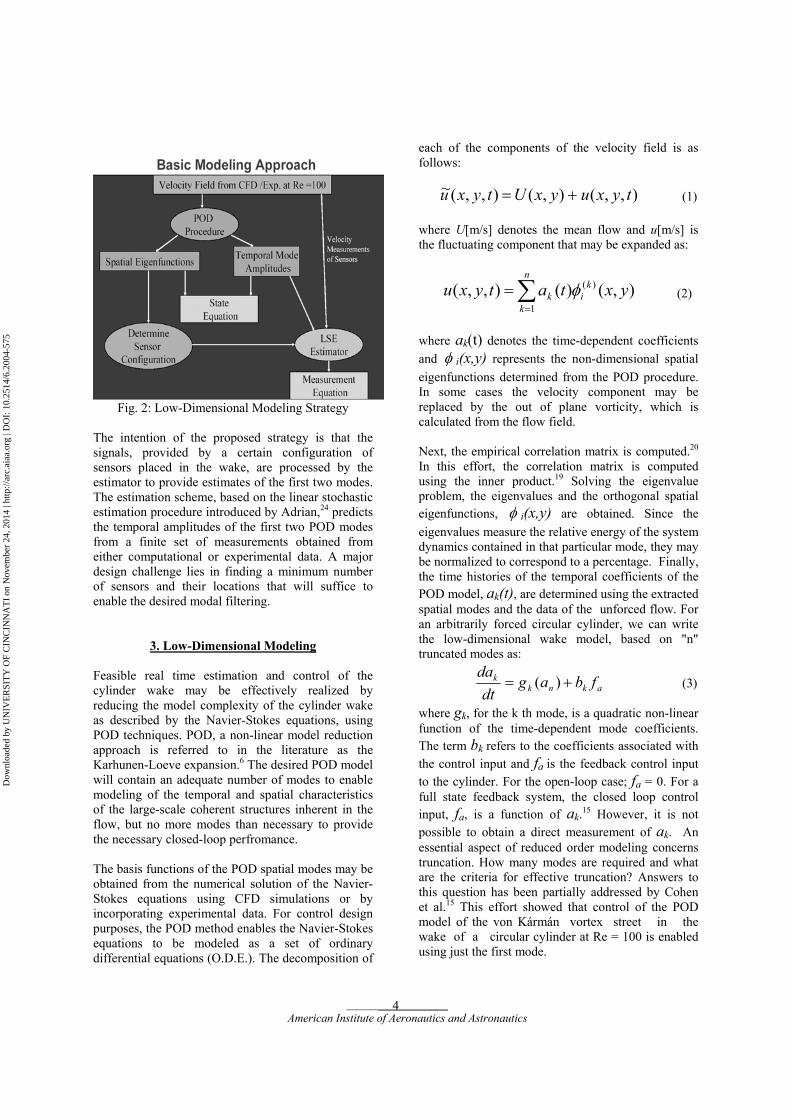
Fig. 4: Time depending POD coefficients obtained using transient forcing
In terms of the lock-in region, this flow behavior is encountered as long as the controller keeps the flow within the lock-in region. The complex 3D behavior outside the lock-in regime is clearly not modeled in the POD modes. More importantly, if the displacement of the cylinder becomes smaller than about 5% of the cylinder diameter, the flow will no longer be responsive to the forcing. In several applications of the POD method for low-dimensional model building, the mean flow is removed.26 Practically speaking, from an ensemble of snapshots, the 'average snapshot' is computed and then this profile is subtracted from each member of the ensemble. This is done mainly for reasons of scale; i.e. the deviations from the mean contain information of interest but may be small compared to the mean. However, Siegel et al13 demonstrated that as the closed-loop controller reduces the unsteady vortex induced drag in the cylinder wake, there is a basic transfer of energy to the mean-flow mode. It is important to note that the desire of the closed-loop controller is not to dissipate the unsteady modes alone but to transfer the energy back to the mean flow. Therefore the low-dimensional model should include a mean flow mode. This vital conclusion has also been noted by Gerhard at al.8 Siegel13 used the estimate of this "dynamic" mean flow mode to adapt the phase of a PD (proportional differential) controller applied to the cylinder wake at Re=100. By
ensuring that the controller was restricted to operate within the envelope of the POD model, this approach resulted in a reduction of the vortex induced drag by 90%.13 Given the importance of capturing the energy exchange between the mean flow mode and the unsteady periodic modes, care needs to be taken in selecting an appropriate snapshot ensemble for the POD procedure. If the snapshots are comprised from the steady state regime alone as done often in recent years26,27, then there is an obvious difficulty in capturing the desired transient energy exchange. As an example, consider the cylinder wake problem at Re=100. A POD procedure is applied to 500 “snapshots” from steady-state forcing at an amplitude of d/D=0.2 and ramping up until d/D=0.3. The mean flow (φ 1 ) was included in the POD procedure. In addition to the mean flow mode φ 1 and the von Kármán modes φ 2 and φ 3, a fourth transient mode, φ 4, was also detected. The inclusion of the dynamics of φ 4 enables accounting for energy exchange between the mean flow mode and the shedding modes. For the case studied, the energy content of φ 4 is about 25% of the von Kármán periodic modes. About 99.17% of the entire kinetic energy is contained within the first 4 modes. Once the essential dynamics has been captured, we can go on and obtain
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
004-
575
____________ American Institute of Aeronautics and Astronautics
7
the desired set of ordinary differential equations, described in Equation 3. This procedure has been described in detail by Luchtenburg et al28.
4. Sensor Configuration and Observability The time histories of the temporal coefficients of the POD model are determined by applying the least squares technique to the spatial modes of the unforced flow. The intent of the proposed strategy is that the velocity measurements provided by the sensors are processed by the estimator to provide the estimates of the first two temporal modes. The estimation scheme, based on the linear stochastic estimation procedure introduced by Adrian,24 predicts the temporal amplitudes of the first four POD modes from a finite set of velocity measurements obtained from the CFD solution of the uncontrolled cylinder wake. For each sensor configuration, velocity measurements, equally spaced at an appropriate time interval, were used. The mode amplitudes, a1-a4, were mapped onto the extracted sensor signals, us, as follows:
∑=
=m
ss
nsn tuCta
1)()( (4)
where m is the number of sensors and Cns are the
coefficients of the linear mapping. The effectiveness of a linear mapping between velocity measurements and POD states has been experimentally validated by Siegel et al. 23 The coefficients Cn
s (n=1,2; s=1,m) in Equation (4) are obtained via the linear stochastic estimation method from the set of discrete sensor signals and temporal mode amplitudes.
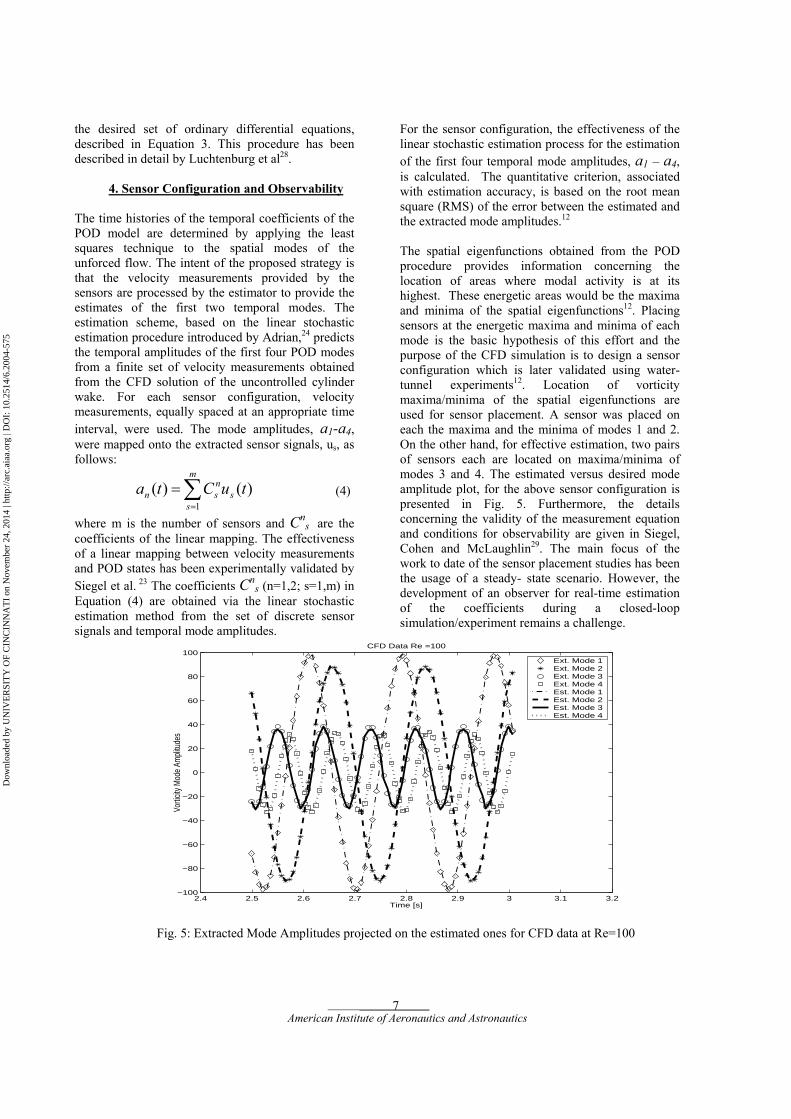
For the sensor configuration, the effectiveness of the linear stochastic estimation process for the estimation of the first four temporal mode amplitudes, a1 – a4, is calculated. The quantitative criterion, associated with estimation accuracy, is based on the root mean square (RMS) of the error between the estimated and the extracted mode amplitudes.12 The spatial eigenfunctions obtained from the POD procedure provides information concerning the location of areas where modal activity is at its highest. These energetic areas would be the maxima and minima of the spatial eigenfunctions12. Placing sensors at the energetic maxima and minima of each mode is the basic hypothesis of this effort and the purpose of the CFD simulation is to design a sensor configuration which is later validated using water-tunnel experiments12. Location of vorticity maxima/minima of the spatial eigenfunctions are used for sensor placement. A sensor was placed on each the maxima and the minima of modes 1 and 2. On the other hand, for effective estimation, two pairs of sensors each are located on maxima/minima of modes 3 and 4. The estimated versus desired mode amplitude plot, for the above sensor configuration is presented in Fig. 5. Furthermore, the details concerning the validity of the measurement equation and conditions for observability are given in Siegel, Cohen and McLaughlin29. The main focus of the work to date of the sensor placement studies has been the usage of a steady- state scenario. However, the development of an observer for real-time estimation of the coefficients during a closed-loop simulation/experiment remains a challenge.
2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2−100
−80
−60
−40
−20
0
20
40
60
80
100
Time [s]
Vorti
city M
ode
Ampli
tude
s
CFD Data Re =100
Ext. Mode 1Ext. Mode 2Ext. Mode 3Ext. Mode 4Est. Mode 1Est. Mode 2Est. Mode 3Est. Mode 4
Fig. 5: Extracted Mode Amplitudes projected on the estimated ones for CFD data at Re=100
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
004-
575

____________ American Institute of Aeronautics and Astronautics
8
5. Controllability and Stability of a POD Model
For the purpose of control design, let us linearize the low-dimensional state equation given Equation (3). For the origin, ak = 0 as the desired equilibrium or fixed point, the aim is to find an appropriate control law for fa that will make the equilibrium stable. The main focus here is to establish conditions for stability. The function gk can be expanded locally as a Taylor series about the desired equilibrium point:
(5) where represents higher order terms of the expansion and can be neglected for the stability analysis. For the wake POD model, we observe that gk(0) ~ 0. Therefore, the linearization of ka& about the desired equilibrium point is: (6) where the Jacobian, J, is:
∂∂
∂∂
∂∂
∂∂
=
M
MM
M
ag
ag
ag
ag
J)0(...)0(
.........
)0(...)0(
1
1
1
1
For the nonlinear system given in Equation (3), the simplest approach to study controllability is to consider its linearization as described in Equation (6). For the linearized state space, controllability may be defined as follows: Definition: The pair (J, B) is state controllable if and only if there exists a control fa that will transfer any initial state Ak(t = 0) to the desired equilibrium point in finite time. Based on Nijmeijer and van der Schaft30, for Equation (6), the following algebraic condition for controllability may be written down for B = [b1,b2,…bM]:
The conditions for asymptotic stability can now be stated, based on those proposed by Glendinning31 for linearized models about their equilibrium point, as follows: For the linearization given in Equation (6) if
the Jacobian, JC , has n eigenvalues, each of which has a strictly negative real part, then the equilibrium point is asymptotically stable. In addition to conditions for stability, it is also important to make sure that the closed-loop linearized system is hyperbolic. A fixed point of an nth order system is hyperbolic if all the eigenvalues of the linearization (Jacobian) lie off the imaginary axis. The Hartman-Grobman theorem32 states that the local phase portrait near a hyperbolic fixed point is “topologically equivalent” to the phase portrait of the linearization; in particular the stability type of the fixed point is faithfully captured by the linearization. A linearized system, see Equation (6), that is hyperbolic is equivalent in terms of stability and bifurcations, chaos and attractors, equilibria and limit cycles to the nonlinear POD model (see Equation (3)). From a practical point of view, let us consider the case when the controller is simply based on proportional control feeding back on the estimate of mode 1 alone, namely:
(8) where KP is the proportional gain of the P controller and a1
est is the estimate of the time-dependent coefficient of Mode 1, a1. Inserting the control law in Equation (8) into Equation (6) yields:
(9)
where JC is the “closed-loop” Jacobian and a linear stability analysis based on JC will provide an insight into the behavior of the closed-loop system:
Now, it is the aim of the control design to find an appropriate gain, KP, which will render all the eigenvalues of JC to have a negative real part. In addition, the eigenvalues need to lie off the imaginary axis by an adequate margin so that the system is hyperbolic. An illustration of this approach for the cylinder wake problem is detailed in Cohen et al15.
akkjj
kkk fbaoa
agga ⋅++⋅∂
∂+= )()0()0(&
(7)
nBJBJJBBrank n =− )( 12 MLMMM
)( kao
aKjk fbaJa ⋅+⋅=& estPa aKf 1⋅−=
∂∂
−∂
∂
∂∂
−∂
∂
=
M
MPM
M
MP
C
ag
Kba
g
ag
Kba
g
J)0(
....)0(
.........
)0(....
)0(
1
11
1
1
jCk aJa ⋅=&
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
004-
575
____________ American Institute of Aeronautics and Astronautics
9
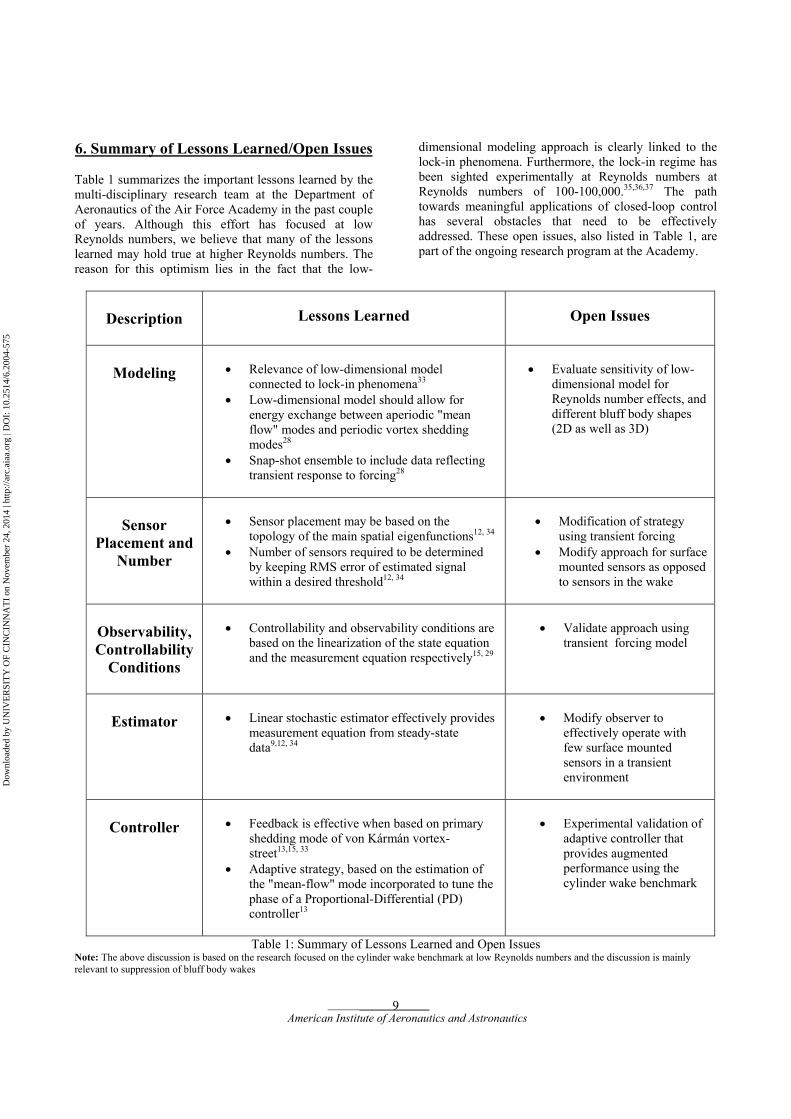
6. Summary of Lessons Learned/Open Issues Table 1 summarizes the important lessons learned by the multi-disciplinary research team at the Department of Aeronautics of the Air Force Academy in the past couple of years. Although this effort has focused at low Reynolds numbers, we believe that many of the lessons learned may hold true at higher Reynolds numbers. The reason for this optimism lies in the fact that the low-
dimensional modeling approach is clearly linked to the lock-in phenomena. Furthermore, the lock-in regime has been sighted experimentally at Reynolds numbers at Reynolds numbers of 100-100,000.35,36,37 The path towards meaningful applications of closed-loop control has several obstacles that need to be effectively addressed. These open issues, also listed in Table 1, are part of the ongoing research program at the Academy.
Description
Lessons Learned
Open Issues
Modeling
• Relevance of low-dimensional model
connected to lock-in phenomena33 • Low-dimensional model should allow for
energy exchange between aperiodic "mean flow" modes and periodic vortex shedding modes28
• Snap-shot ensemble to include data reflecting transient response to forcing28
• Evaluate sensitivity of low-
dimensional model for Reynolds number effects, and different bluff body shapes (2D as well as 3D)
Sensor
Placement and Number
• Sensor placement may be based on the
topology of the main spatial eigenfunctions12, 34 • Number of sensors required to be determined
by keeping RMS error of estimated signal within a desired threshold12, 34
• Modification of strategy
using transient forcing • Modify approach for surface
mounted sensors as opposed to sensors in the wake
Observability, Controllability
Conditions
• Controllability and observability conditions are
based on the linearization of the state equation and the measurement equation respectively15, 29
• Validate approach using
transient forcing model
Estimator
• Linear stochastic estimator effectively provides
measurement equation from steady-state data9,12, 34
• Modify observer to
effectively operate with few surface mounted sensors in a transient environment
Controller
• Feedback is effective when based on primary shedding mode of von Kármán vortex-street13,15, 33
• Adaptive strategy, based on the estimation of the "mean-flow" mode incorporated to tune the phase of a Proportional-Differential (PD) controller13
• Experimental validation of
adaptive controller that provides augmented performance using the cylinder wake benchmark
Table 1: Summary of Lessons Learned and Open Issues Note: The above discussion is based on the research focused on the cylinder wake benchmark at low Reynolds numbers and the discussion is mainly relevant to suppression of bluff body wakes
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
004-
575
____________ American Institute of Aeronautics and Astronautics
10
Acknowledgements
The first author would like to acknowledge the support provided by the AFOSR/ESEP program. The authors would like to acknowledge the support and assistance provided by Dr. Belinda King and Lt. Col. Sharon Heise from the Air Force Office of Scientific Research and Dr. James Myatt of the Air Force Research Laboratories. We would also like to acknowledge the fruitful discussions and information exchange with Drs. Gilead Tadmor and Bernd Noack. This effort was supported by CFD simulations provided by Dr. Jim Forsythe and Mr. Mark Luchtenburg. We would also like to thank Dr. Avi Seifert and Dr. Mark Glauser for their helpful comments and fruitful discussions.
References
1Gad-el-Hak, M., "Modern Developments in Flow Control", Applied Mechanics Reviews, vol. 49, 1996, pp. 365–379.
2Cattafesta III, L.N., Williams, D.R., Rowley, C.W., and Alvi, F.S., "Review of Active Control of Flow-Induced Cavity Resonance", AIAA Paper 2003-3567, June 2003.
3Samimy, M., Debiasi, M., Caraballo, E., E.C., Ozbay, H., Efe, M.O., Yuan, X., DeBonis, J., and Myatt, J.H., "Development of Closed-loop Control for Cavity Flows", AIAA Paper 2003-4258, June 2003.
4Rapoport, D., Fono, I., Cohen, K., and Seifert, A., "Closed-loop Vectoring Control of a Turbulent Jet Using Periodic Excitation", Journal of Propulsion and Power, Vol. 19, No. 4, 2003, pp. 646-654.
5Allan, B.G., Juang, Jer-Nan, Raney, D.L., Seifert, A., Pack, L., and Brown, D.E., "Closed-loop Separation Control Using Oscillatory Flow Excitation", NASA/CR-2000-210324, ICASE Report No. 2000-32, August 2000.
6Tadmor, G., and Banaszuk, A., "Observation feedback control of vortex motion in a recirculation region, IEEE TransControl Sys. Tech., Vol. 10, pp. 749 – 755.
7Gillies, E. A., “Low-dimensional Control of the Circular Cylinder Wake”, Journal of Fluid Mechanics, Vol. 371, 1998, pp. 157-178.
8Gerhard, J., Pastoor, M., King, R., Noack, B.R., Dillmann, A., Morzynski, M., Tadmor, G., "Model-based Control of Vortex Shedding using Low-dimensional Galerkin Models", AIAA Paper2003-4262, June 2003.
9Cohen, K., Siegel S., McLaughlin T., and Myatt J., "Proper Orthogonal Decomposition Modeling Of A Controllled Ginzburg-Landau Cylinder Wake Model", AIAA Paper 2003-1292, January 2003.
10Cohen, K., Siegel S., McLaughlin T., and Myatt J., 2003, "Fuzzy Logic Control of a Circular Cylinder Vortex Shedding Model", AIAA Paper 2003-1290, January 2003.
11Siegel S., Cohen K., McLaughlin T., and Myatt J., 2003, "Real-Time Particle Image Velocimetry for Closed-Loop Flow Control Studies", AIAA Paper 2003-0920, January 2003.
12Cohen, K., Siegel S., and McLaughlin T., 2003, "Sensor Placement Based on Proper Orthogonal Decomposition Modeling of a Cylinder Wake", AIAA Paper 2003-4259, June 2003.
13Siegel S., Cohen, K. and McLaughlin T., 2003, "Feedback Control of a Circular Cylinder Wake in Experiment and Simulation", AIAA Paper 2003-3569, June 2003.
14Siegel S., Cohen, K., and McLaughlin T., “ Low-Dimensional Feedback Control of the von Karman Vortex Street at a Reynolds number of 100”, IUTAM Symposium: Fluid-Structure Interactions, Piscataway, USA, 2-6 June 2003.
15Cohen K., Siegel S., McLaughlin T., and Gillies E., 2003, “Feedback Control of a Cylinder Wake Low-Dimensional Model”, AIAA Journal, Vol. 41, No. 8, August 2003.
16Albarede, P., and Provansal M., “Quasi-periodic cylinder wakes and the Ginzburg-Landau model”, Journal of Fluid Mechanics, Vol. 291, pp. 191-222, 1995.
17Roussopoulos, K., “Feedback Control of Vortex Shedding at Low Reynolds Numbers”, Journal of Fluid Mechanics, Vol. 248, 1993, pp. 267-296.
18Monkewitz, P.A, “Modeling of self-excited wake oscillations by amplitude equations”, Experimental Thermal and Fluid Science, Vol. 12, pp. 175-183, 1996.
19Abergel, F. and Temam, R., "On some Control Problems in Fluid Mechanics", Theor. Comput. Fluid Dynamics, Vol. 1, 1990, p. 303.
20Holmes, P., Lumley, J.L., and Berkooz, G., “Turbulence, Coherent Structures, Dynamical Systems and Symmetry”, Cambridge University Press, Cambridge, 1996.
21Sirovich, L., “Turbulence and the Dynamics of Coherent Structures Part I: Coherent Structures”, Quarterly of Applied Mathematics, Vol. 45, No. 3, 1987, pp. 561-571. 22Balas, M.J., “Active Control of Flexible Systems”, Journal of Optimization Theory and Applications, Vol. 25, No. 3, 1978, pp. 217-236. 23Meirovitch, L., “Dynamics and Control of Structures”, John Wiley & Sons, Inc., New York, 1990, pp. 313-351. 24Adrian, R.J., “On the Role of Conditional Averages in Turbulence Theory”, Proceedings of the Fourth Biennial Symposium on Turbulence in Liquids, J. Zakin and G. Patterson (Eds.), Science Press, Princeton, 1977, pp. 323-332. 25Koopmann, G., “The Vortex Wakes of Vibrating Cylinders at Low Reynolds Numbers”, Journal of Fluid Mechanics, Vol. 28 Part 3, 1967, pp. 501-512.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
004-
575
____________ American Institute of Aeronautics and Astronautics
11
26Graham, W.R., Peraire, J., Tang, K.Y. Optimal control of vortex shedding using low-order models. Part I - open-loop model development. International Journal for Numerical Methods in Engineering, Vol. 44, No. 7, 1999, pp. 945-972.
27Graham, W.R., Peraire, J., Tang, K.Y. Optimal control of vortex shedding using low-order models. Part II - model-based control. International Journal for Numerical Methods in Engineering Vol. 44, No. 7, 1999, pp. 973-990.
28Luchtenburg, M., Cohen, K., D., Siegel, S., McLaughlin, T, Noack, B., and Tadmor, G. "Low Dimensional Model of a Cylinder Wake", Session EM, EM.005, 56th APS/DFD Meeting, Nov. 23-25, 2003, New Jersey. 29Siegel S., Cohen K., Smith D., and McLaughlin T, "Observability Conditions for POD Modes in a Circular Cylinder Wake", 55th APS/DFD Meeting, Vol. 47, No. 10, Paper DN 4, Dallas, TX, Nov. 24-26, 2002.
30Nijmeijer, H., and van der Schaft, A. J., “Nonlinear dynamical control systems”, Springer-Verlag New York Inc., New York, 1990, pp. 73-113. 31Glendinning, P., “Stability, Instability and Chaos: An Introduction to the theory of non-linear differential equations”, Cambridge Texts in Applied Mathematics, Cambridge University Press, New York, 1994, pp. 25-53. 32Strogatz., S. H., “ Nonlinear dynamics and chaos – with applications to Physics, Chemistry and Engineering”, Studies in Nonlinearity, Addison-Wesley Publishing Company, Reading, MA, 1994, pp. 145-181.
33Siegel S., Cohen K., and McLaughlin T., "Feedback Control of a Circular Cylinder Wake in a Water Tunnel Experiment", AIAA Paper 2004-0580, January 2004.
34Cameron, J., Sick, A., Cohen, K., Wetlesen, D., and Siegel, S., "Determination of Effective Sensor Configuration for Suppression of von Kármán Vortex Street ", AIAA Paper 2004-0578, January 2004.
35Griffen, O.M., "Flow Similitude and Vortex Lock-On in Bluff Body Near Wakes", Physics of Fluids A, Vol.1, pp. 697-703.
36Griffen, O., M., "Review – Vortex Shedding Lock-on and Flow Control in Bluff Body Wakes", Transactions of the ASME, Vol. 113, December 1991, pp.526-537.
37Naim, A., Greenblatt, D., Seifert A., and Wygnanski, I., "Active Control of Cylinder Flow with and without a Splitter Plate using Piezoelectric Actuators", AIAA Paper 2002-3070, June 2002.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
004-
575
Related Documents