C Dynamical S C A L T E C H Connecting orbits and invariant manifolds in the spatial three-body problem Shane D. Ross Control and Dynamical Systems, Caltech Work with G. G´ omez, W. Koon, M. Lo, J. Marsden, J. Masdemont Special Session on Celestial Mechanics, January 7, 2004

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
C����������� Dynamical S�� �����
CA L T EC H
Connecting orbits andinvariant manifolds in thespatial three-body problem
Shane D. RossControl and Dynamical Systems, Caltech
Work with G. Gomez, W. Koon, M. Lo, J. Marsden, J. Masdemont
Special Session on Celestial Mechanics, January 7, 2004
Introduction
�Goal
� Use dynamical systems techniques to identify key trans-port mechanisms and useful orbits for space missions.
�Outline
� Circular restricted three-body problem
� Equilibrium points and invariant manifold structures
� Construction of trajectories with prescribed itineraries
� Connecting orbits, e.g., heteroclinic connections
� Tours of Jupiter’s moons
2
Introduction
�Current research importance
� Development of some NASA mission trajectories, suchas the recently launched Genesis Discovery Mission,and the upcoming Jupiter Icy Moons Orbiter
� Of current astrophysical interest for understandingthe transport of solar system material (eg, how ejectafrom Mars gets to Earth, etc.)
3
Three-Body Problem
�Circular restricted 3-body problem
� the two primary bodies move in circles; the muchsmaller third body moves in the gravitational field ofthe primaries, without affecting them
� the two primaries could be Jupiter and a moon
� the smaller body could be a spacecraft or asteroid
� we consider the planar and spatial problems
� there are five equilibrium points in the rotating frame,places of balance which generate interesting dynamics
4
Three-Body Problem
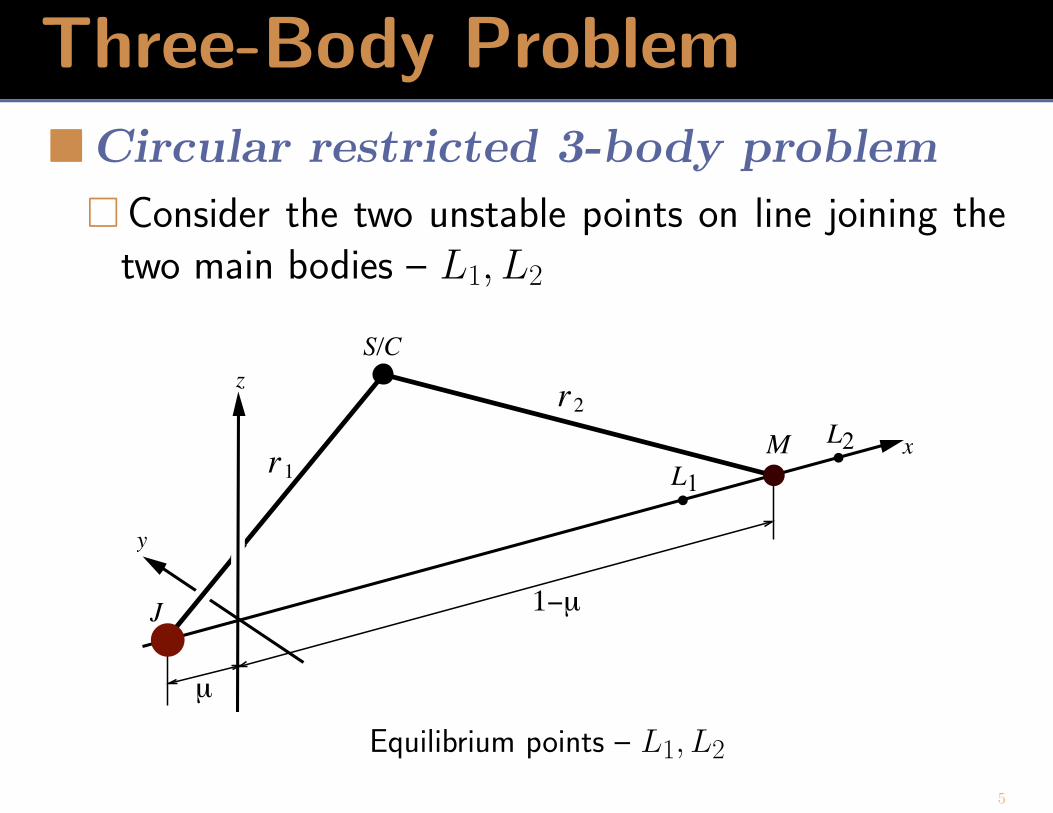
�Circular restricted 3-body problem
� Consider the two unstable points on line joining thetwo main bodies – L1, L2
µ
1−µ
x
z
y
J
S/C
M
2r
1r L1
L2
Equilibrium points – L1, L2
5
Three-Body Problem� orbits exist around L1 and L2; both periodic and quasi-
periodic
• Lyapunov, halo and Lissajous orbits
� one can draw the invariant manifolds assoicated to L1
(and L2) and the orbits surrounding them
� these invariant manifolds play a key role in what follows
6
Three-Body Problem� Equations of motion (planar):
x− 2y = −Ux, y + 2x = −Uy
where
U = −(x2 + y2)
2− 1− µ
r1− µ
r2.
� Have a first integral, the Hamiltonian energy, given by
E(x, y, x, y) =1
2(x2 + y2) + U(x, y).
� Energy manifolds are codimension 1 in the phase space.
7
Realms of Possible Motion
�Effective potential
� In a rotating frame, the equations of motion describea particle moving in an effective potential plus a mag-netic field (goes back to work of Jacobi, Hill, etc).
8
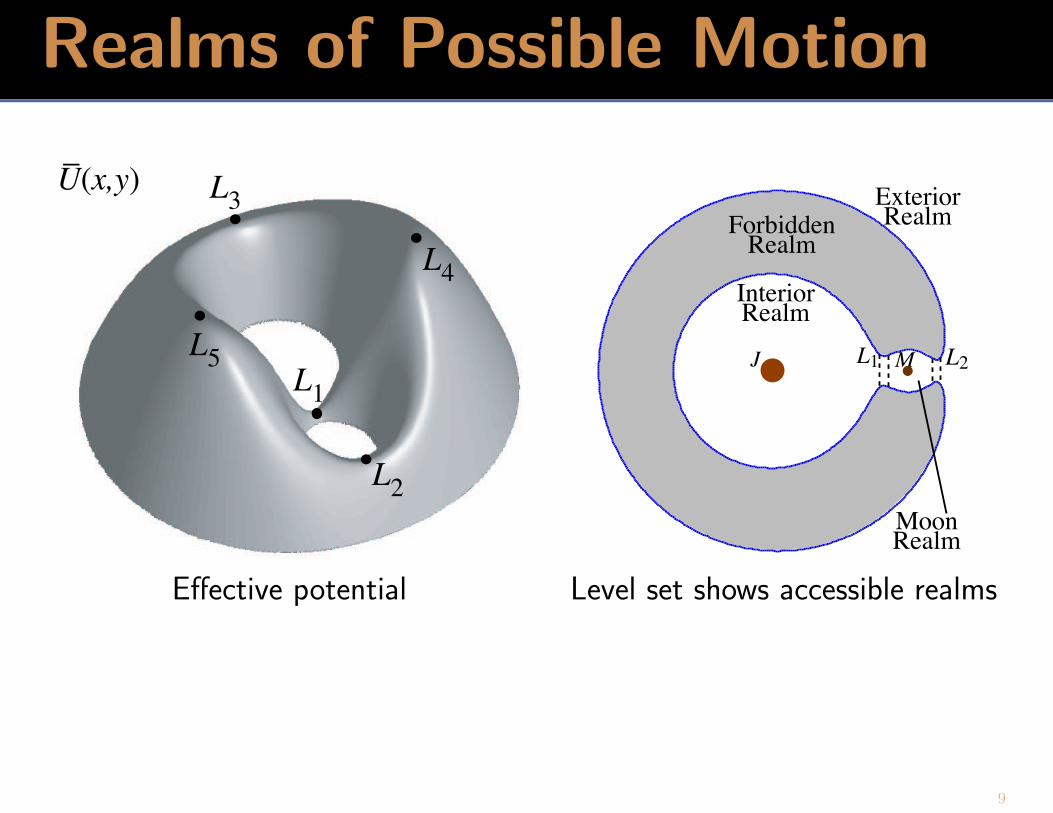
Realms of Possible Motion
U(x,y)_
L4
L5
L3
L1
L2
J ML1 L2
ExteriorRealm
InteriorRealm
MoonRealm
ForbiddenRealm
Effective potential Level set shows accessible realms
9
Motion Near Equilibria
�For saddles of rank 1
� Near equilibrium point, suppose linearizedHamiltonian vector field has eigenvalues±iωj, j = 1, . . . , N − 1, and ±λ.
� Assume the complexification is diagonalizable.
� Hamiltonian normal form theory tranformsHamiltonian into a lowest order form:
H(q, p) =
N−1∑i=1
ωi
2
(p2
i + q2i
)+ λqNpN .
� Equilibrium point is of typecenter× · · · × center× saddle (N − 1 centers).
10
Motion Near Equilibria
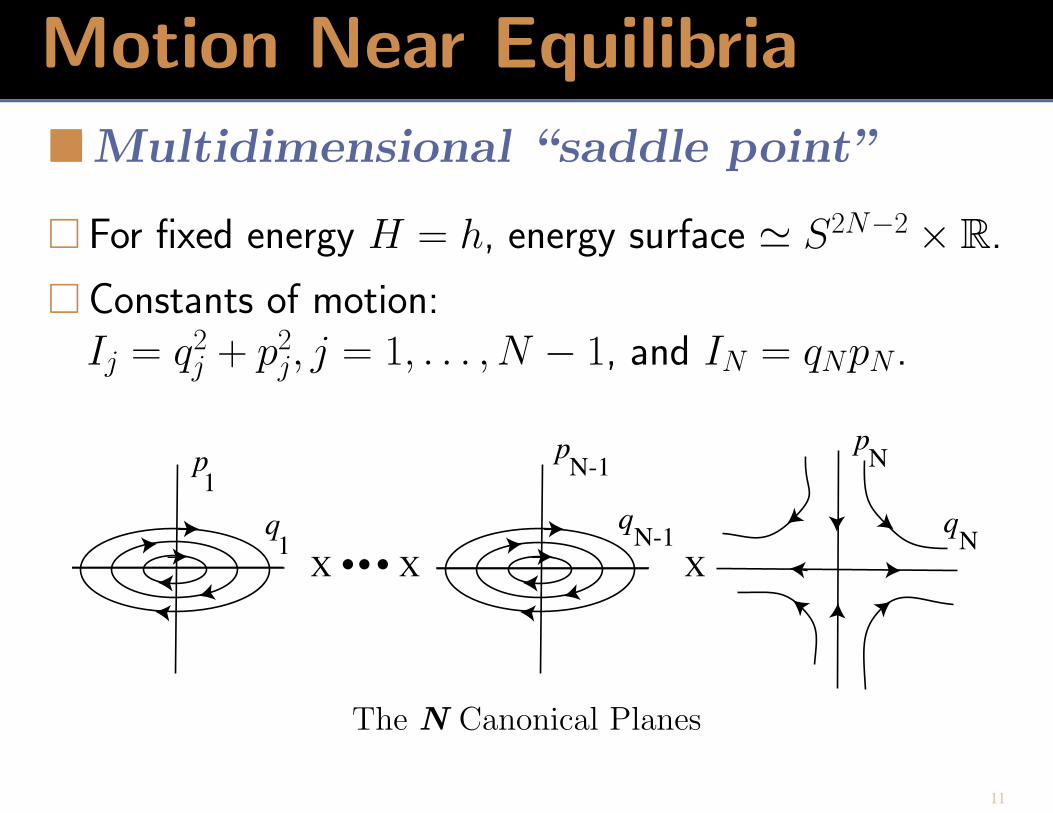
�Multidimensional “saddle point”
� For fixed energy H = h, energy surface ' S2N−2 × R.
� Constants of motion:Ij = q2
j + p2j, j = 1, . . . , N − 1, and IN = qNpN .
1q
1p N-1
p
qN-1
X X X
Np
qN
The N Canonical Planes
11
Motion Near Equilibria� Normally hyperbolic invariant manifold
at qN = pN = 0,
Mh =
n−1∑i=1
ωi
2
(p2
i + q2i
)= h > 0.
Note that Mh ' S2N−3, not a single trajectory.
� Four “cylinders” of asymptotic orbits: the stable andunstable manifolds W s
±(Mh), Wu±(Mh), which have the
structure S2N−3 × R.
12
Flow Near Equilibria� Dynamics near L1 & L2 in spatial problem:
saddle × center × center.
� Hamiltonian for linearized equations has eigenvalues±λ,±iν, and ±iω, where ν 6= ω,
� Change of coordinates yields
H2 = λq1p1 +ν
2(q2
2 + p22) +
ω
2(q2
3 + p23).
� For fixed energy H = h, energy surface ' S4 × R.
� Constants of motion:q1p1, q2
2 + p22 and q2
3 + p23.
13
Flow Near Equilibria� Normally hyperbolic invariant manifold
at q1 = p1 = 0,
Mh =ν
2(q2
2 + p22) +
ω
2(q2
3 + p23) = h > 0.
Note that Mh ' S3, not a single trajectory.
� Four “cylinders” of asymptotic orbits: the stable andunstable manifolds W s
±(Mh), Wu±(Mh), which have the
structure S3 × R.
14
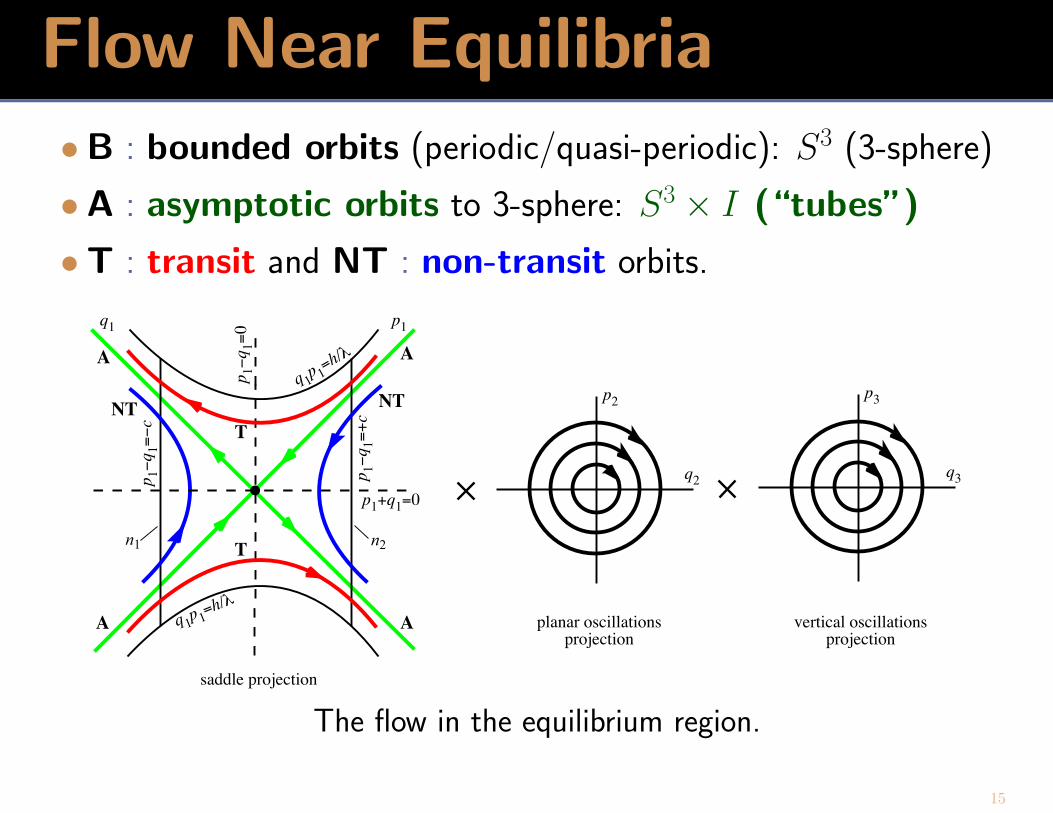
Flow Near Equilibria•B : bounded orbits (periodic/quasi-periodic): S3 (3-sphere)
•A : asymptotic orbits to 3-sphere: S3 × I (“tubes”)
•T : transit and NT : non-transit orbits.
p1−q1=−c
p1−q1=+c
p1−q1=0
p1+q1=0
n1 n2
p1q1
q2
p2
q3
p3
saddle projection
planar oscillationsprojection
vertical oscillationsprojection
q 1p 1=h/λ
q 1p 1=h/
λ
NTNT
T
T
A
A
A
A
The flow in the equilibrium region.
15
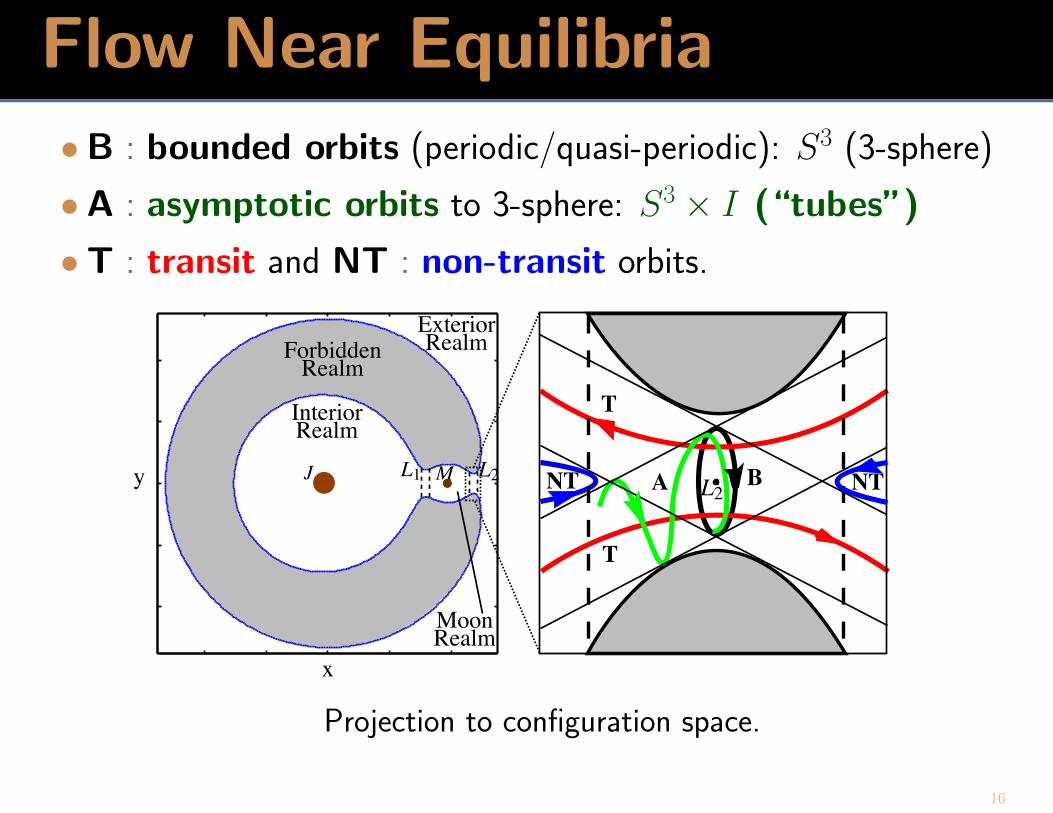
Flow Near Equilibria•B : bounded orbits (periodic/quasi-periodic): S3 (3-sphere)
•A : asymptotic orbits to 3-sphere: S3 × I (“tubes”)
•T : transit and NT : non-transit orbits.
x
y J ML1 L2
ExteriorRealm
InteriorRealm
MoonRealm
ForbiddenRealm
L2B
T
T
A NTNT
Projection to configuration space.
16
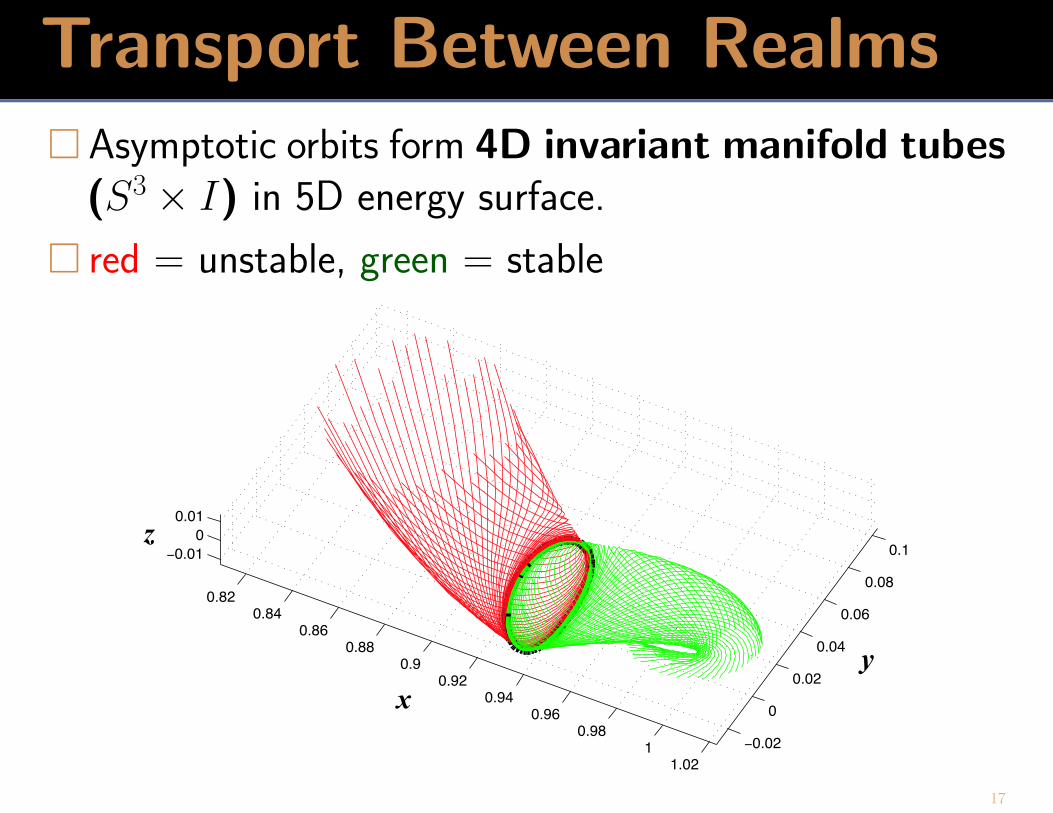
Transport Between Realms� Asymptotic orbits form 4D invariant manifold tubes
(S3 × I) in 5D energy surface.
� red = unstable, green = stable
0.82
0.84
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
1.02
−0.02
0
0.02
0.04
0.06
0.08
0.1−0.01
0
0.01
x
z
y
17
Transport Between Realms• These manifold tubes play an important role in governing what
orbits approach or depart from a moon (transit orbits)
• and orbits which do not (non-transit orbits)
• transit possible for objects “inside” the tube, otherwise notransit — this is important for transport issues
18
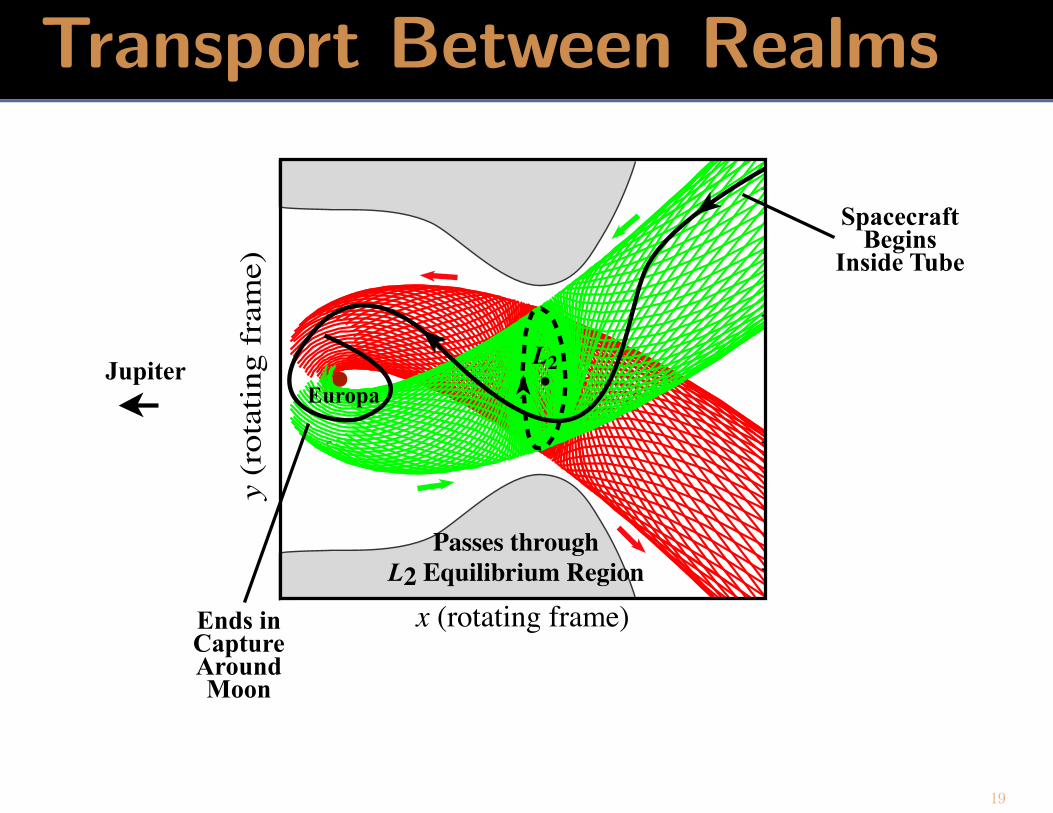
Transport Between Realms
x (rotating frame)
y (
rota
tin
g f
ram
e)
Passes through
L2 Equilibrium Region
JupiterEuropa
L2
Ends inCaptureAround Moon
SpacecraftBegins
Inside Tube
19
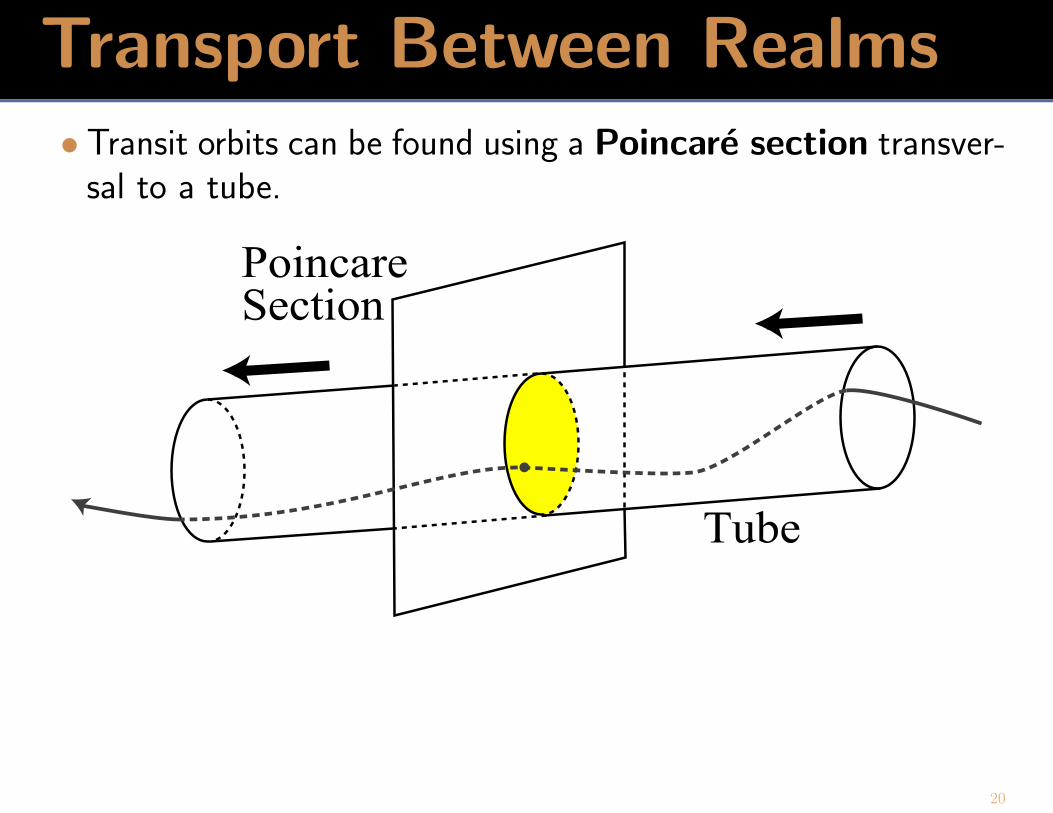
Transport Between Realms• Transit orbits can be found using a Poincare section transver-
sal to a tube.
Poincare
Section
Tube
20
Construction of Trajectories� One can systematically construct new trajectories, which
use little fuel.
• by linking stable and unstable manifold tubes in the right order
• and using Poincare sections to find trajectories “inside” thetubes
� One can construct trajectories involving multiple 3-bodysystems.
21
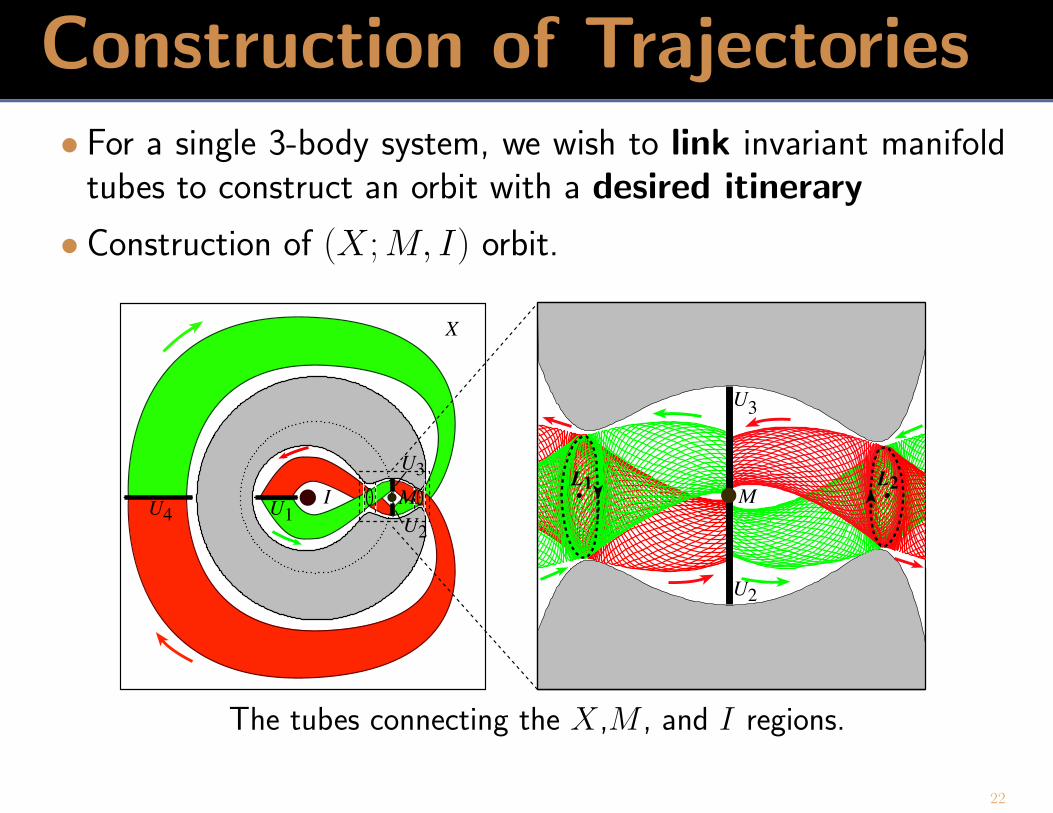
Construction of Trajectories• For a single 3-body system, we wish to link invariant manifold
tubes to construct an orbit with a desired itinerary
• Construction of (X ; M, I) orbit.
X
I M
L1 L2M
U3
U2
U1U4
U3
U2
The tubes connecting the X,M , and I regions.
22
Construction of Trajectories• First, integrate two tubes until they pierce a common Poincaresection transversal to both tubes.
• Second, pick a point in the region of intersection and integrateit forward and backward.
23
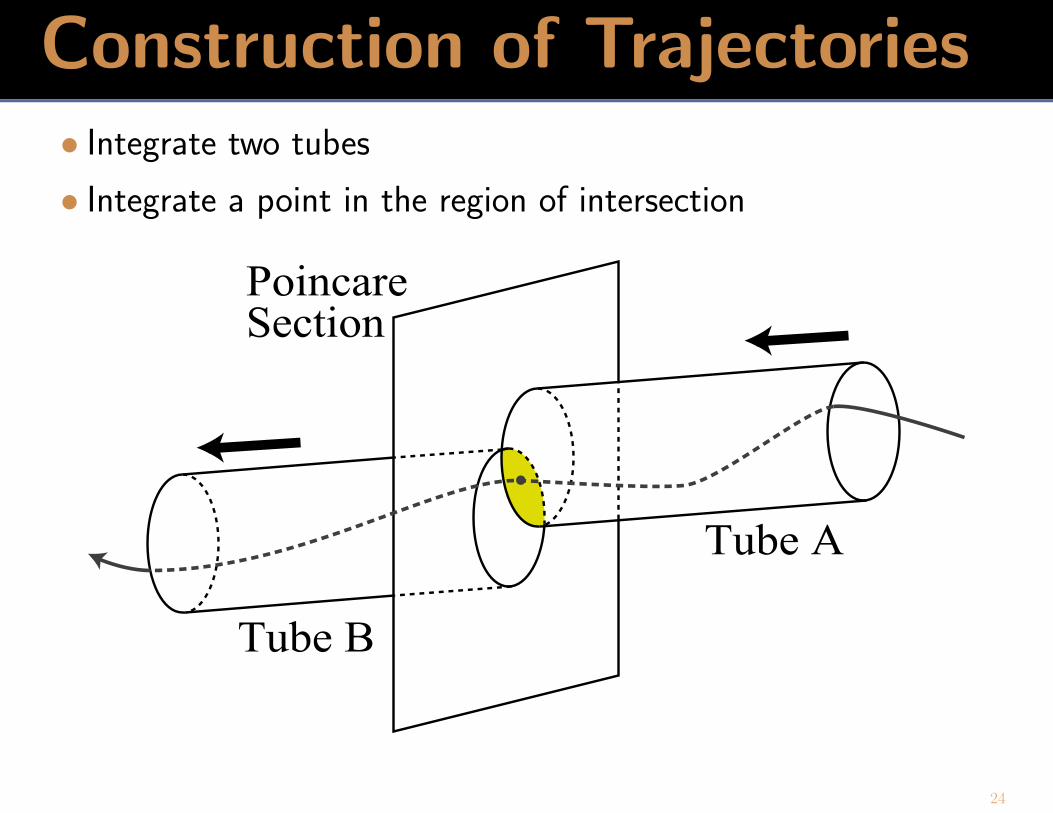
Construction of Trajectories• Integrate two tubes
• Integrate a point in the region of intersection
Poincare
Section
Tube A
Tube B
24
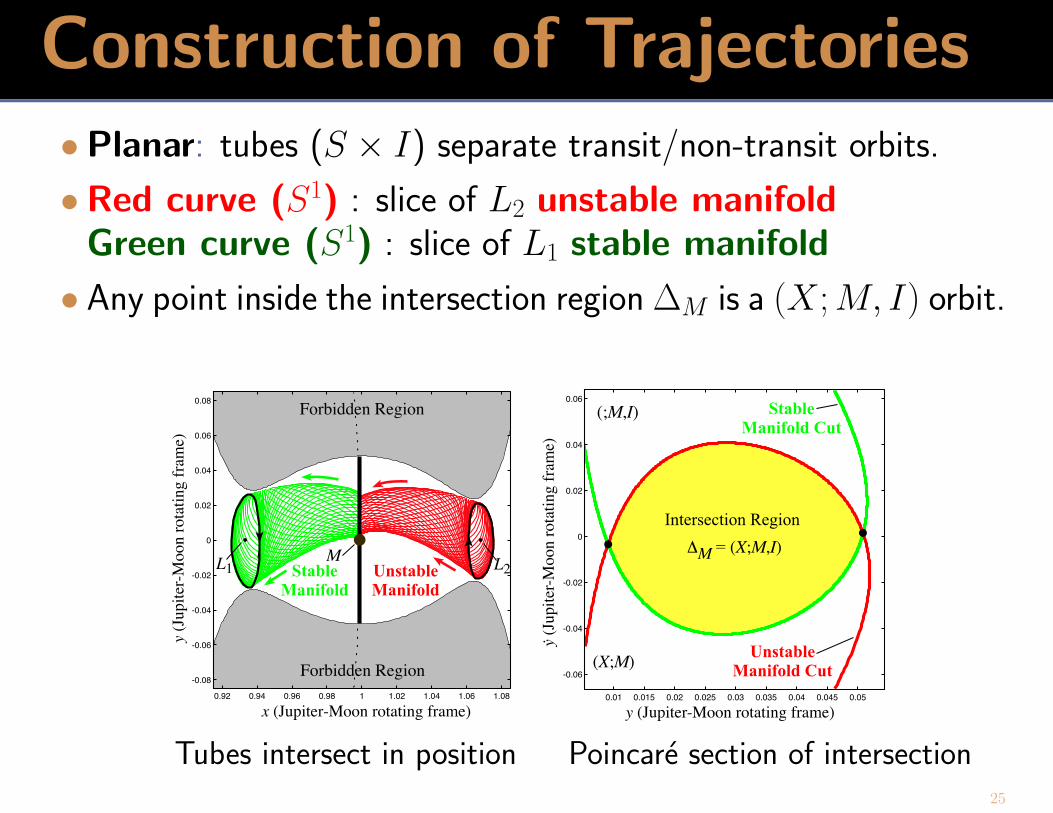
Construction of Trajectories•Planar: tubes (S × I) separate transit/non-transit orbits.
•Red curve (S1) : slice of L2 unstable manifoldGreen curve (S1) : slice of L1 stable manifold
• Any point inside the intersection region ∆M is a (X ; M, I) orbit.
∆M = (X;M,I)
Intersection Region
0.92 0.94 0.96 0.98 1 1.02 1.04 1.06 1.08
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
x (Jupiter-Moon rotating frame)
y (
Jup
iter
-Mo
on
ro
tati
ng
fra
me)
ML1 L2
0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.05
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
y (Jupiter-Moon rotating frame)
(X;M)
(;M,I)
y (
Jupit
er-M
oon r
ota
ting f
ram
e).
Forbidden Region
Forbidden Region
Stable
Manifold
Unstable
Manifold
Stable
Manifold Cut
Unstable
Manifold Cut
Tubes intersect in position Poincare section of intersection25
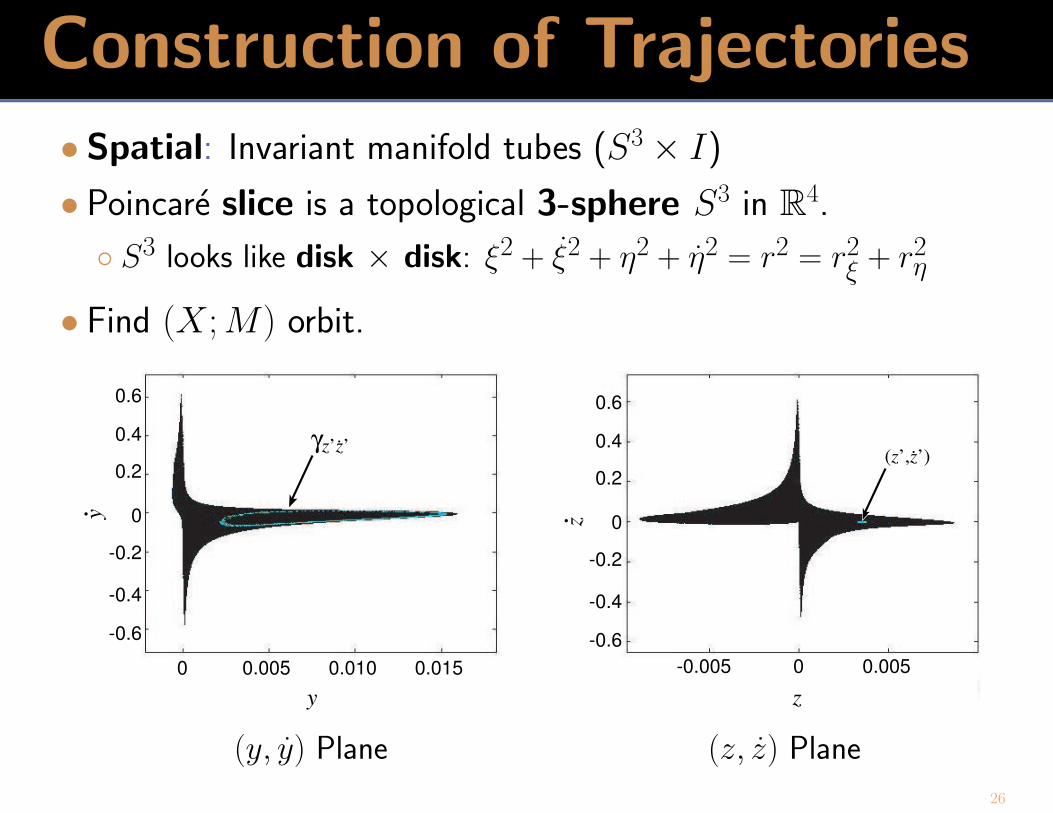
Construction of Trajectories• Spatial: Invariant manifold tubes (S3 × I)
• Poincare slice is a topological 3-sphere S3 in R4.
◦ S3 looks like disk × disk: ξ2 + ξ2 + η2 + η2 = r2 = r2ξ + r2
η
• Find (X ; M) orbit.
-0.005 0.0050
z
0.6
0.4
0.2
-0.2
0
-0.6
-0.4z.
0 0.0100.005
y0.015
0.6
0.4
0.2
-0.2
0
-0.6
-0.4
y.
γz’z’. (z’,z’).
(y, y) Plane (z, z) Plane
26
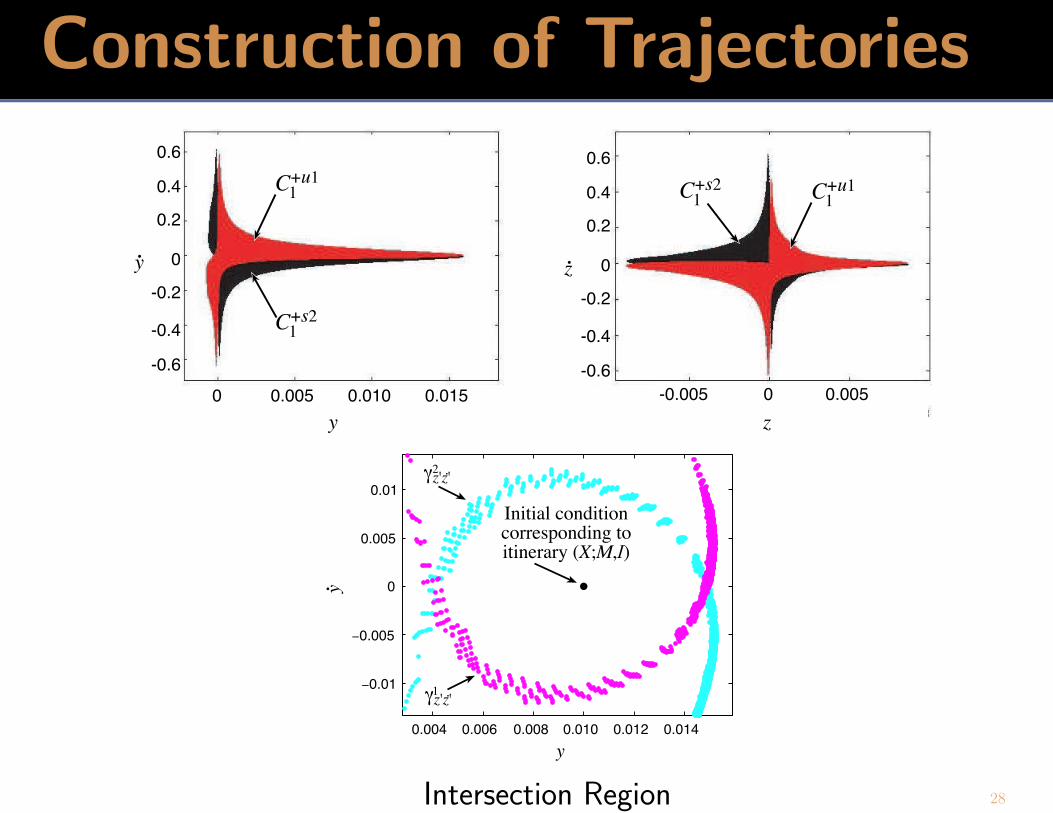
Construction of Trajectories• Similarly, while the cut of the stable manifold tube is S3, its
projection on (y, y) plane is a curve for z = c, z = 0.
• Any point inside this curve is a (M, I) orbit.
• Hence, any point inside the intersection region ∆M is a(X ; M, I) orbit.
27
Construction of Trajectories
-0.005 0.0050
z
0.6
0.4
0.2
-0.2
0
-0.6
-0.4
z
.
0 0.0100.005
y
0.015
0.6
0.4
0.2
-0.2
0
-0.6
-0.4
y
.
C+u11
C+s21
C+u11
C+s21
0.004 0.006 0.008 0.010 0.012 0.014
−0.01
−0.005
0
0.005
0.01
y
y.
γz'z'.1
γz'z'.2
Initial conditioncorresponding toitinerary (X;M,I)
Intersection Region 28
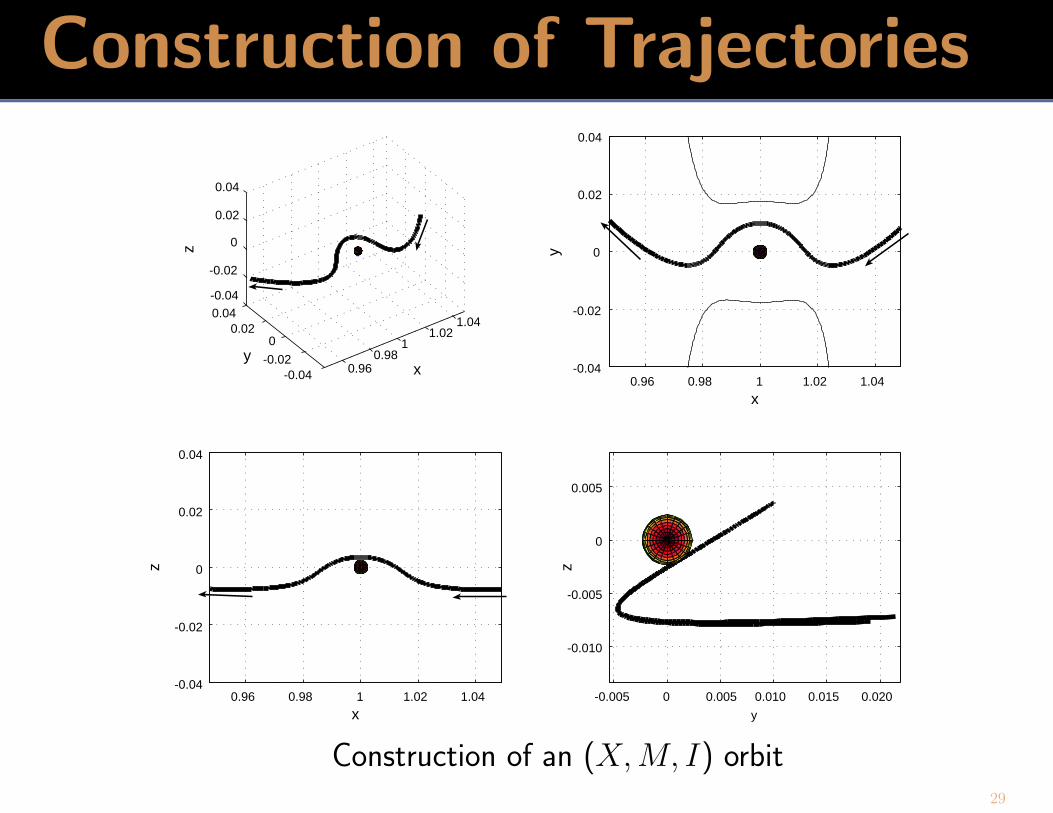
Construction of Trajectories
0.96 0.98 1 1.02 1.04-0.04
-0.02
0
0.02
0.04
x
y
0.96 0.98 1 1.02 1.04-0.04
-0.02
0
0.02
0.04
x
z
-0.005 0 0.005 0.010 0.015 0.020
-0.010
-0.005
0
0.005
y
z
z
0.981
1.021.04
-0.04-0.02
00.02
0.04-0.04
-0.02
0
0.02
0.04
xy
0.96
Construction of an (X, M, I) orbit29
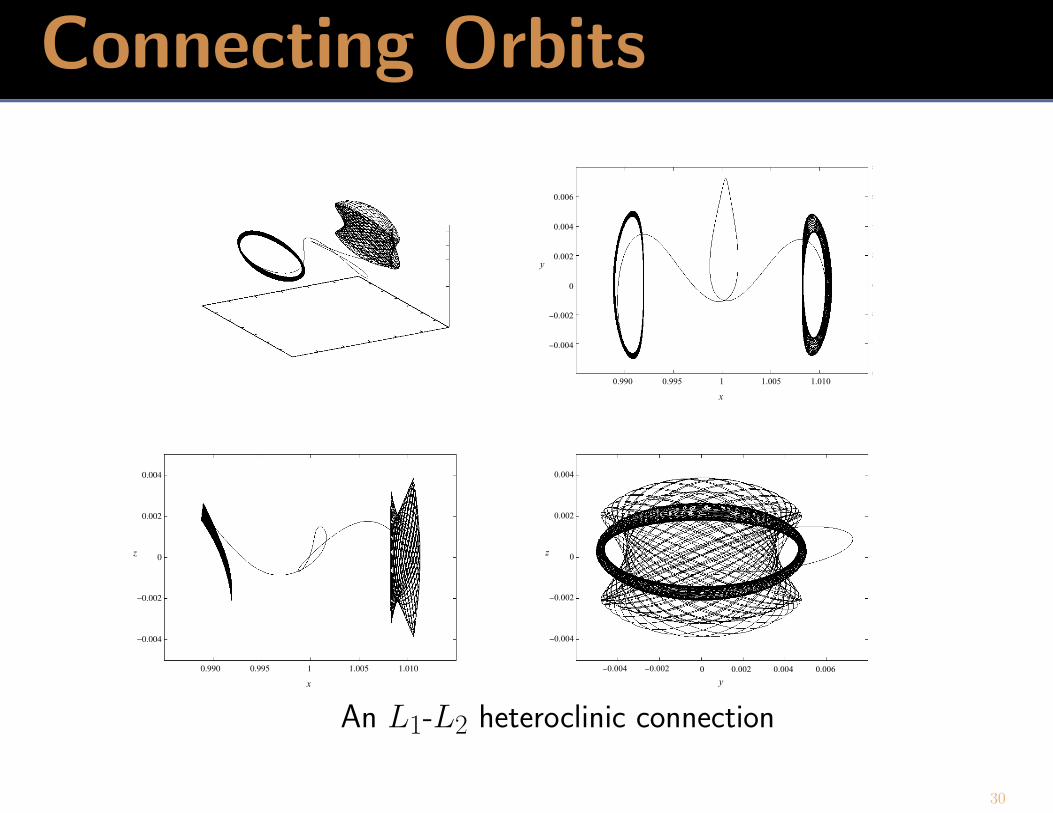
Connecting Orbits
y0.002
0.004
0.006
−0.002
−0.004
0
1 1.005 1.0100.9950.990
x
z
0.002
0.004
−0.002
−0.004
0
1 1.005 1.0100.9950.990
x
z
0.002
0.004
−0.002
−0.004
0
0 0.002 0.004−0.002−0.004
y
0.006
An L1-L2 heteroclinic connection
30
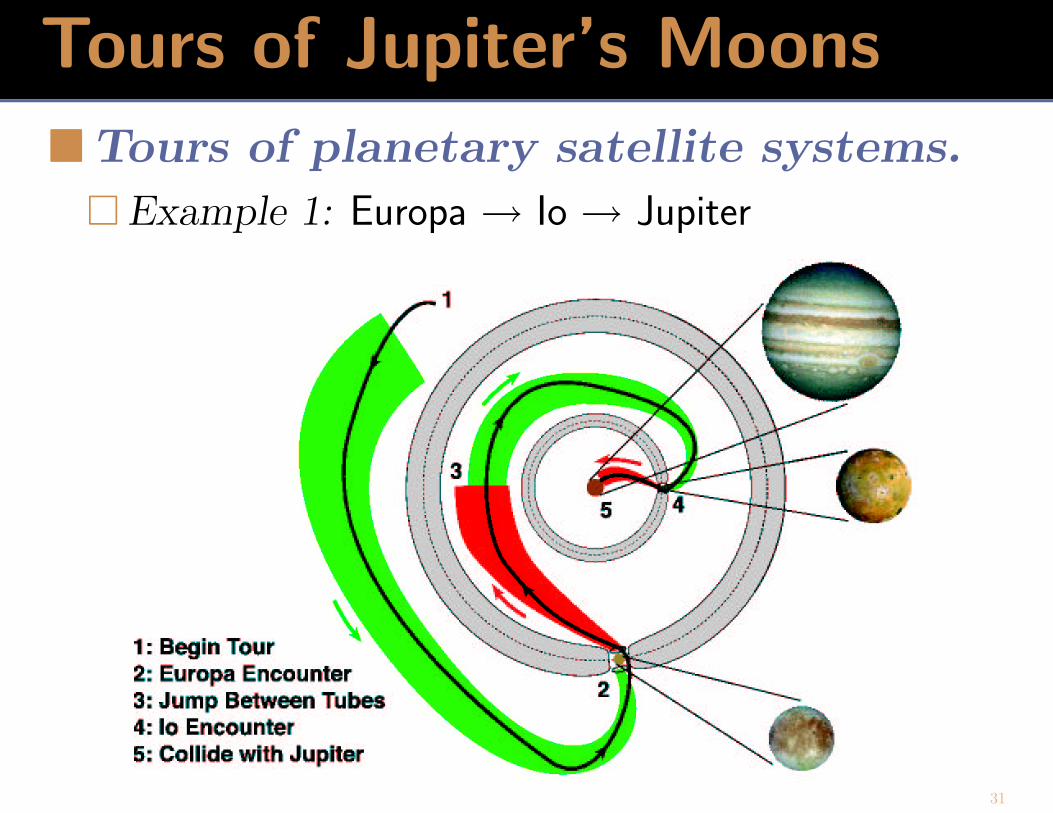
Tours of Jupiter’s Moons
�Tours of planetary satellite systems.
� Example 1: Europa → Io → Jupiter
31
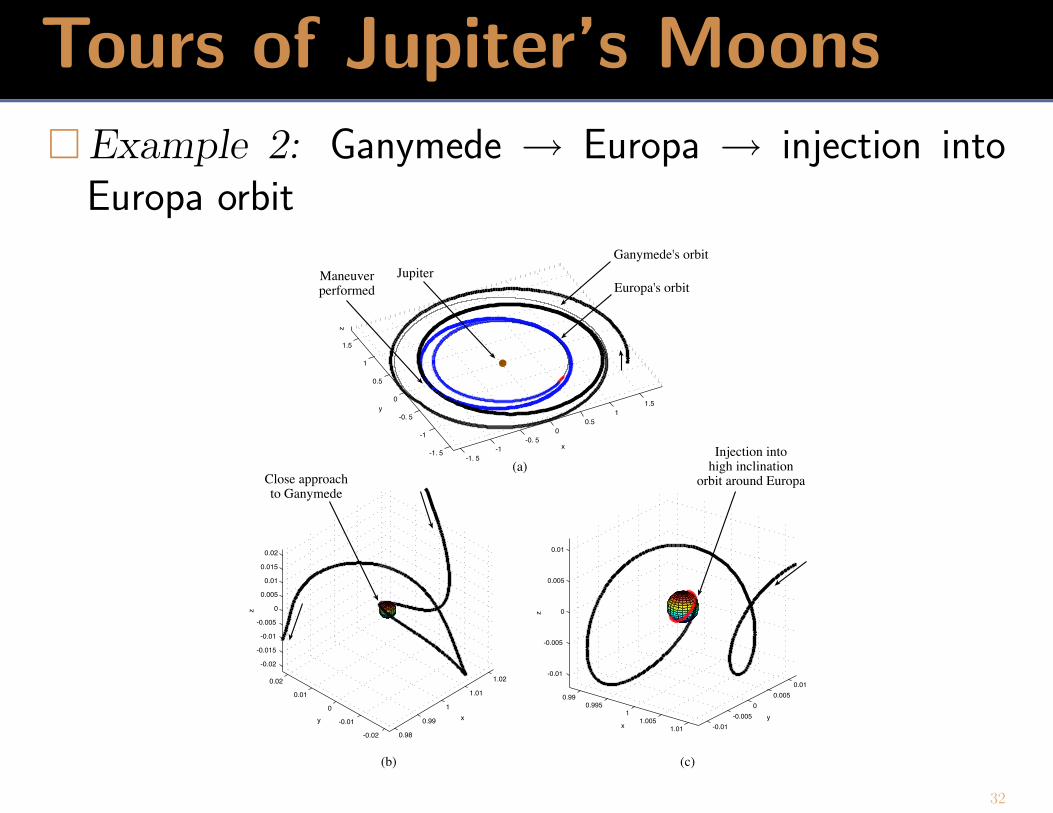
Tours of Jupiter’s Moons� Example 2: Ganymede → Europa → injection into
Europa orbitGanymede's orbit
Jupiter
0.98
0.99
1
1.01
1.02
-0.02
-0.01
0
0.01
0.02
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
xy
z
0.99
0.995
1
1.005
1.01 -0.01
-0.005
0
0.005
0.01
-0.01
-0.005
0
0.005
0.01
y
x
z
Close approachto Ganymede
Injection intohigh inclination
orbit around Europa
Europa's orbit
(a)
(b) (c)
-1. 5
-1
-0. 5
0
0.5
1
1.5
-1. 5
-1
-0. 5
0
0.5
1
1.5
x
y
z
Maneuverperformed
32
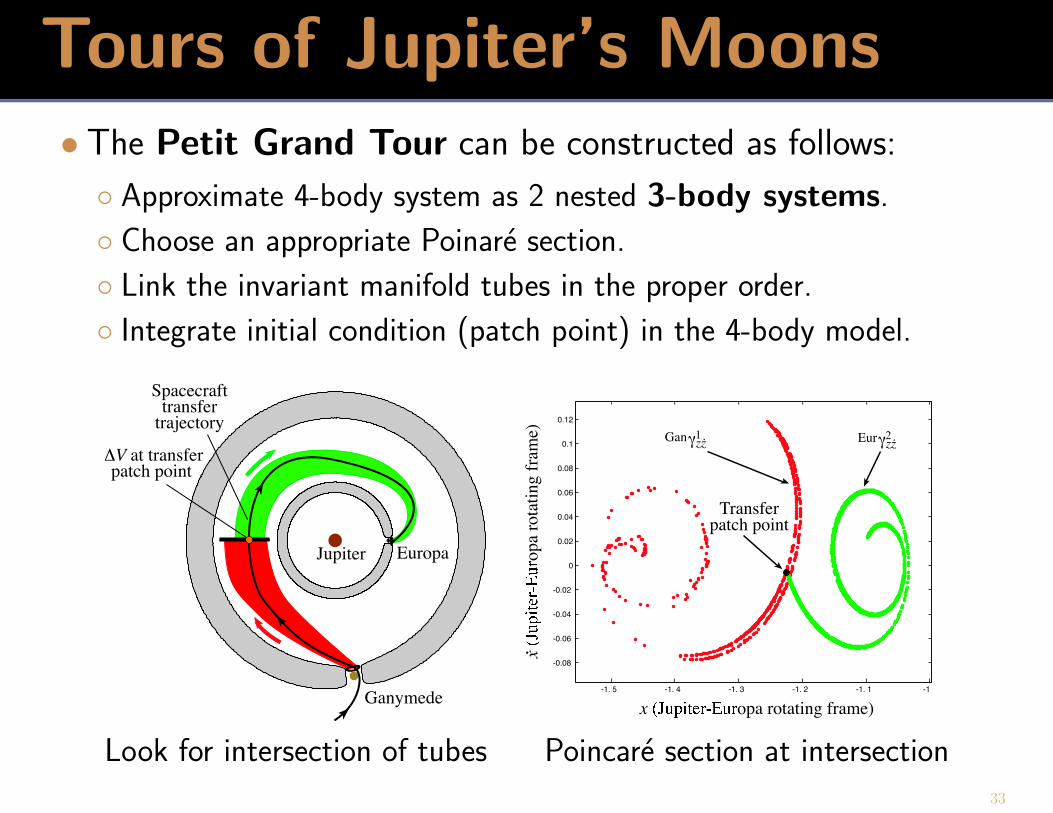
Tours of Jupiter’s Moons• The Petit Grand Tour can be constructed as follows:
◦ Approximate 4-body system as 2 nested 3-body systems.
◦ Choose an appropriate Poinare section.
◦ Link the invariant manifold tubes in the proper order.
◦ Integrate initial condition (patch point) in the 4-body model.
Jupiter Europa
Ganymede
Spacecrafttransfer
trajectory
∆V at transferpatch point
-1. 5 -1. 4 -1. 3 -1. 2 -1. 1 -1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
x������������ �������
opa rotating frame)
x
� ����� � ����� �� o
pa
rota
tin
g f
ram
e)
.
Gan γzz.1 Eur γzz.
2
Transferpatch point
Look for intersection of tubes Poincare section at intersection
33
Some References• Gomez, G., W.S. Koon, M.W. Lo, J.E. Marsden, J. Masdemont and S.D.
Ross [2001] Connecting orbits and invariant manifolds in the spa-tial three-body problem. submitted to Nonlinearity.
• Gomez, G., W.S. Koon, M.W. Lo, J.E. Marsden, J. Masdemont and S.D. Ross[2001] Invariant manifolds, the spatial three-body problem and spacemission design. AAS/AIAA Astrodynamics Specialist Conference.
• Koon, W.S., M.W. Lo, J.E. Marsden and S.D. Ross [2000] Heteroclinic con-nections between periodic orbits and resonance transitions in celes-tial mechanics. Chaos 10(2), 427–469.
The End
34
Related Documents










