Concurrent Programming Without Locks Keir Fraser & Tim Harris

Concurrent Programming Without Locks Keir Fraser & Tim Harris.
Dec 22, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Concurrent Programming Without Locks
Keir Fraser & Tim Harris
Motivation
• Locking introduces dependencies among threads
• Non-blocking solutions keep threads independent, but– they are complicated to program– or depend on unrealistic instructions (CAS2)
• Need a practical and general non-blocking solution
Solutions?
• Only use data structures that can be implemented with CAS?– Limiting
• Build MCAS in software using CAS
• Build Transactional Memory in software using CAS
Goals
• Concreteness• Linearizability• Non-blocking progress guarantee• Disjoint access parallelism• Read parallelism• Dynamicity• Practicable space costs• Composability
Definitions
• Obstruction freedom – a thread will make progress as long as it doesn’t contend with other threads access to any location
• Lock-freedom – The system as a whole will make progress
• Wait-freedom – Every thread makes progress
Focus is on Lock-free designWhole transactions are lock-free, not just the sub-
components
The Basic Problem
• How can we conditionally update multiple locations atomically – using “real” instructions that can only update a single location atomically?
• The trick– Introduce a level of indirection– Use descriptors to access values indirectly
How do we use indirection?
• Memory locations involved in a transaction or MCAS have– old and new uncommitted values stored in a
descriptor– a status field determines which value to use– we must be careful how status is updated!
• Memory locations not involved in a transaction can hold their value directly– requires tidying up after transactions commit

100
101
102
103
104
105
106
107
789456106
123123105
200100102
New ValueOld ValueAddress
Status
Memory
Descriptor
Indirect Memory Access
Direct or Indirect?
• How do we know if the value in a location should be used directly or indirectly?– we can reserve some low order bits– interpret them on each access– but this limits the use of the approach to
aligned pointers

Using Descriptors in TM
• Commit operation atomically updates status field– we have to do it with CAS to avoid races
• Once a descriptor is made visible, only the status field changes– Why?– How?
• Once a transaction’s outcome is decided, the status value doesn’t change– Retries use a new descriptor … why?
• Descriptors are managed via garbage collection
Other requirements
• Descriptors must be able to own locations– one transaction must not unlink another– why?– so what should be done on a conflict, wait?
• But doesn’t this introduce blocking?– not necessarily – contending threads could
help the owner complete
Uncontended Commits
• To be obstruction free, uncontended commits must succeed
• The phases:– Prepare the transaction descriptor (use CCAS
for each location accessed) to atomically link locations while outcome is undecided
– Decide the transaction’s outcome and update the status field (using CAS)
– Update memory (using CAS) and mark the descriptor for collection
Contended Commits
• Contended Commits must make progress– If status is decided, but not complete
• Help the other thread complete
– If status is undecided, either• Abort contending transactions
– needs contention management to prevent live-lock
• Help contending transactions– need some way to ensure success of at least one transaction
– Read-check, used in WSTM or OSTM to ensure read set is still current:
• Abort at least one contender• Help, and ensure progress by ordering transactions
Three STM Implementations
MCAS Multiple Compare And Swap
WSTM Word Software Transactional Memory
OSTM Object Software Transactional Memory
MCAS
CAS( word *address, // actual valueword expected_value,word new_value);
MCAS( int count,word *address[], // actual valuesword expected_value[],word new_value[]);
… but an extra indirection is added because pointers must indirect through the descriptor

MCAS
• Operates only on aligned pointers– enables use of 2 low order bits to distinguish
values from descriptors
• Descriptors contain– status {Success, Failure, Undecided}– N– address[ ]– expected[ ]– new_value[ ]
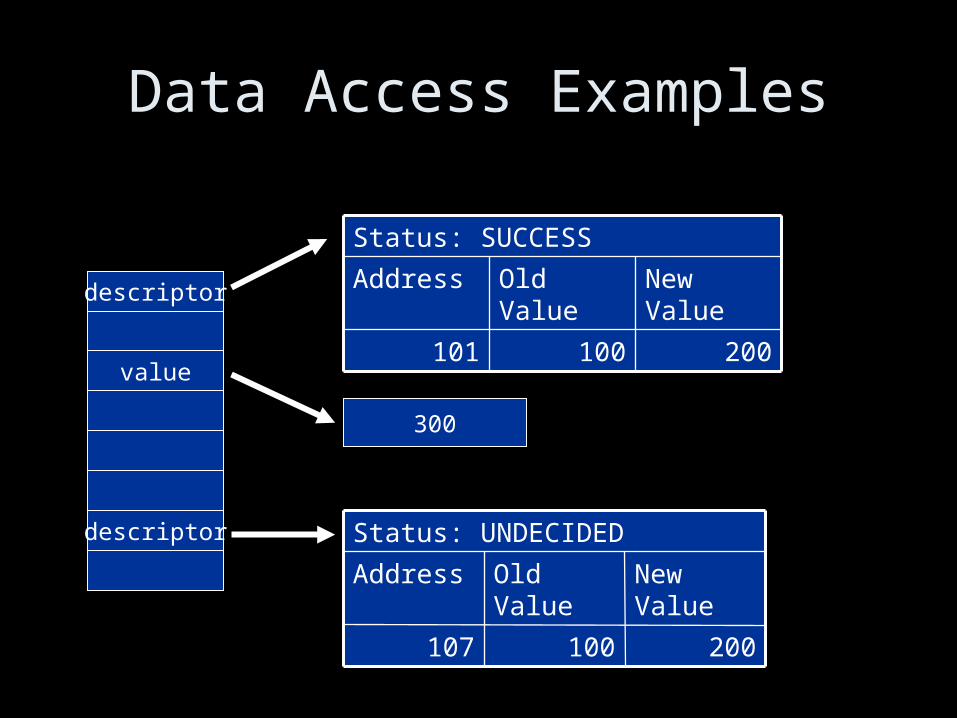
Data Access Examples
200100101
New Value
Old ValueAddress
Status: SUCCESS
descriptor
value
descriptor
300
200100107
New Value
Old ValueAddress
Status: UNDECIDED

The Prepare Phase
• Create MCAS descriptor• Insert descriptor address in each location
– don’t overwrite other concurrent attempts– don’t keep working if another thread has
already helped you succeed or fail• use CAS conditional on undecided status (CCAS)
– MCAS descriptor must not become visible until its fully initialized
• link CCAS descriptors in each location first then swap for MCAS descriptor using CCAS
CCAS
Conditional CAS built from CAS - takes effect only if condition == undecided - used to insert descriptor references in two phases
CCAS( word *address,word expected_value,word new_value,word *condition);
return original value of *address
CCAS
• Create a new private CCAS descriptor
• Copy CCAS parameter values into it
• Try to link it into the target location (using CAS)
• On failure try to help whoever succeeded by using their CCAS descriptor– again using CAS– then retry your own

word *CCAS(word **a, word *e, word *n, word *cond) {
ccas_descriptor *d = new ccas_descriptor();word *v;(d->a, d->e, d->n, d->cond) = (a,e,n,cond);while ( (v = CAS(d->a, d->e, d)) != d->e ) {
if ( IsCCASDesc(v) ) CCASHelp( (ccas_descriptor *)v);
elsereturn v;
}CCASHelp(d);return v;
}void CCASHelp(ccas_descriptor *d) {
bool success = (*d->cond == UNDECIDED);CAS(d->a, d, success ? d->n : d->e);
}
Cost in terms of CAS
• CCAS takes at least 2 CAS to link the MCAS descriptor into each location– 2N CAS for N locatons
• But we still have not committed the MCAS– at least 1 CAS required to set MCAS status – at least N CAS required to update the memory
locations with the new values from the MCAS descriptor

Reading
• We can’t simply read values anymore!
• CCASRead must be used for reading
• It must be able to read values directly and indirectly through CCAS descriptors– detect which situation it is in– function correctly in the presence of
concurrent updates

CCASRead
• Copy address to be read to local
• Test to see if it’s a value or a descriptor
• If it’s a descriptor help the thread whose descriptor it is complete – requires more CAS
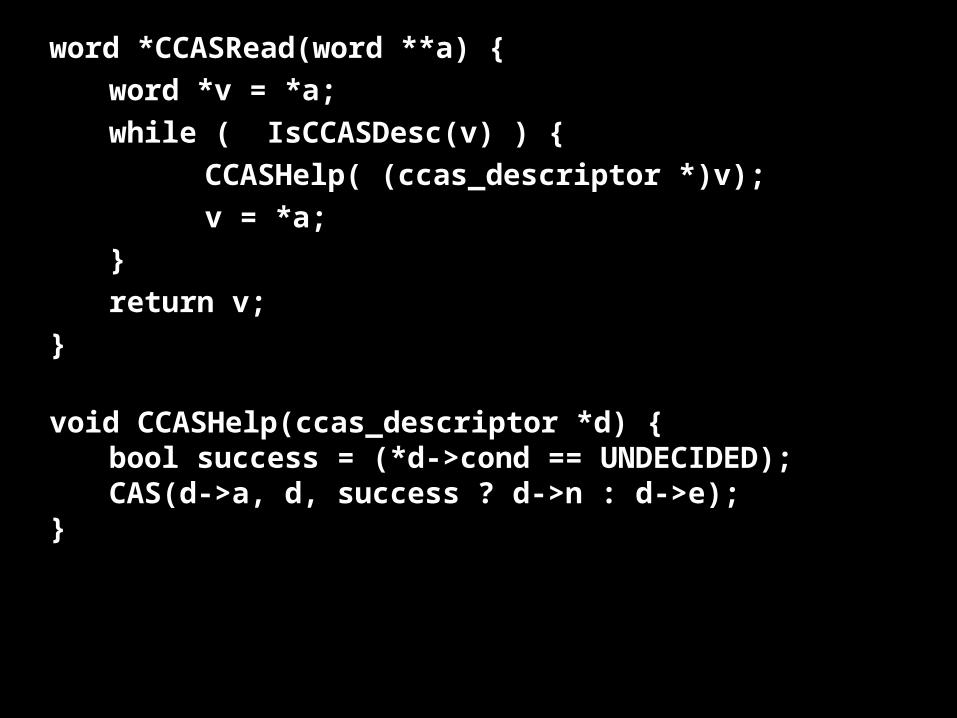
word *CCASRead(word **a) {
word *v = *a;
while ( IsCCASDesc(v) ) {
CCASHelp( (ccas_descriptor *)v);
v = *a;
}
return v;
}
void CCASHelp(ccas_descriptor *d) {bool success = (*d->cond == UNDECIDED);CAS(d->a, d, success ? d->n : d->e);
}
Reading
• We also need an MCASRead to read locations subject to MCAS
• MCASRead used CCASRead to read the contents of the location– if its an MCAS descriptor it must find the
address in the descriptor and determine whether to use the old or new values
– this requires more CCAS
Putting it all together
• Example
MCAS (3, {a,b,c}, {1,2,3}, {4,5,6})
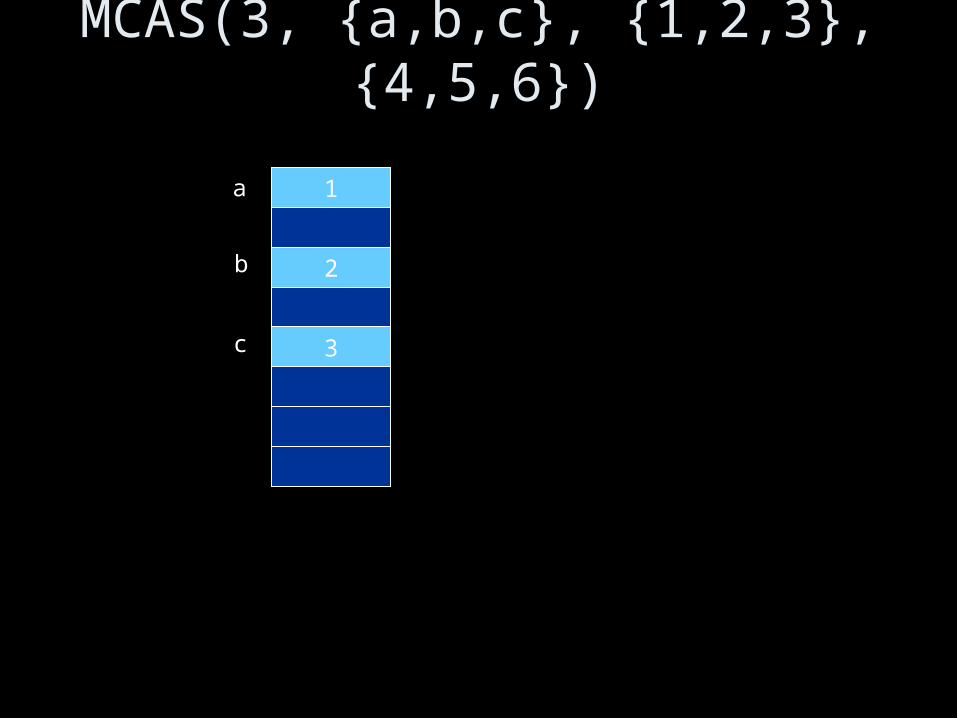
MCAS(3, {a,b,c}, {1,2,3}, {4,5,6})
1
2
3
a
b
c
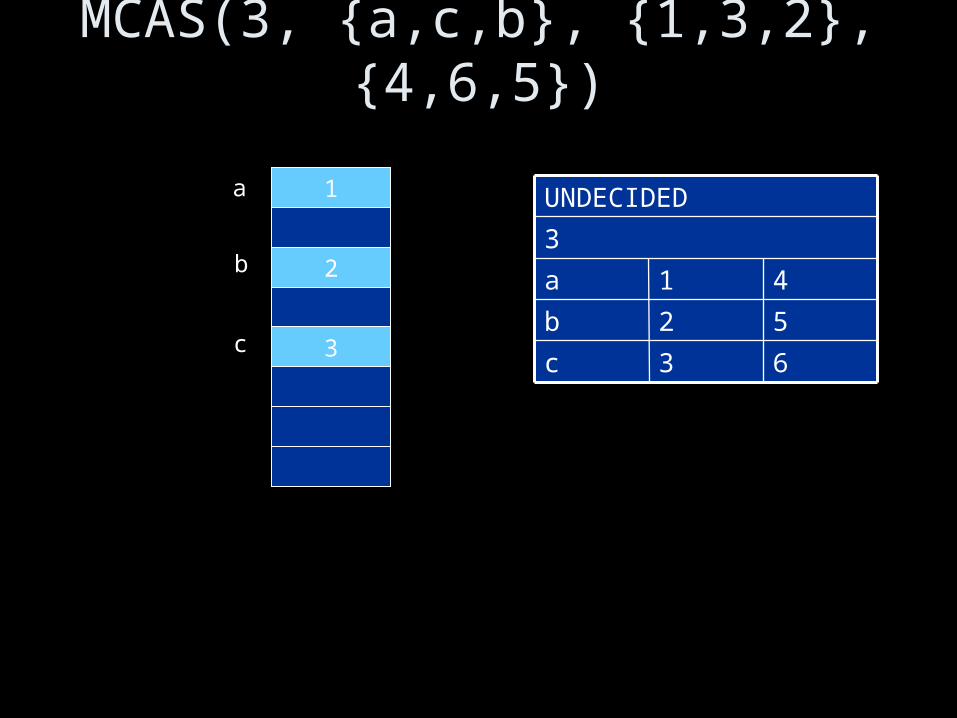
MCAS(3, {a,c,b}, {1,3,2}, {4,6,5})
1
2
363c
52b
41a
3
UNDECIDEDa
b
c

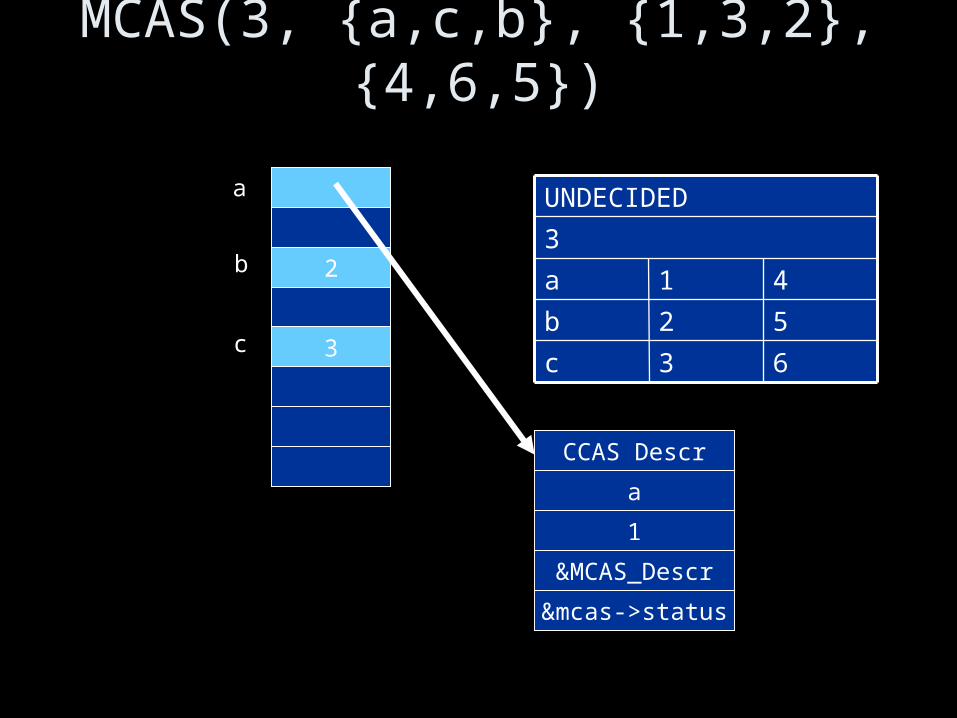
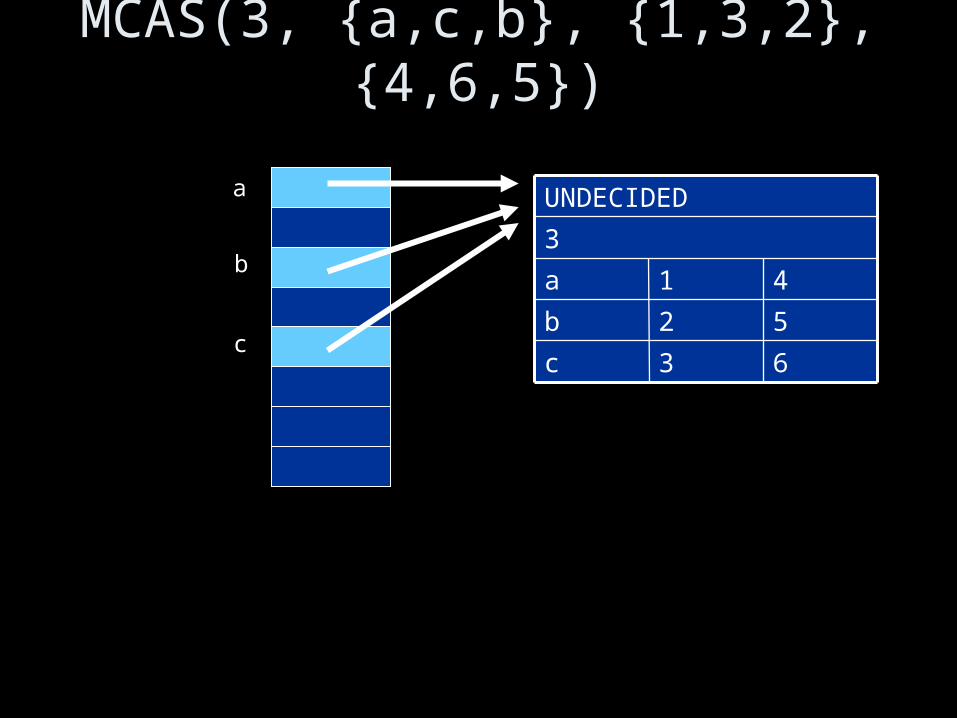
MCAS(3, {a,c,b}, {1,3,2}, {4,6,5})
1
2
363c
52b
41a
3
UNDECIDEDa
b
c
CCAS Descr
a
1
&MCAS_Descr
&mcas->status
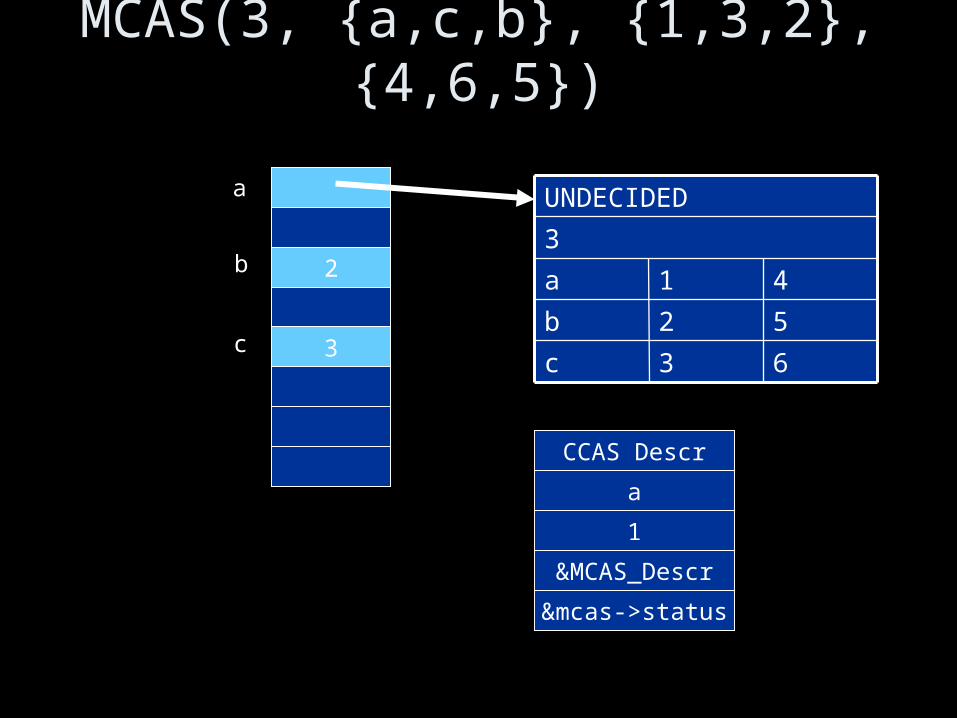
MCAS(3, {a,c,b}, {1,3,2}, {4,6,5})
2
363c
52b
41a
3
UNDECIDEDa
b
c
CCAS Descr
a
1
&MCAS_Descr
&mcas->status
MCAS(3, {a,c,b}, {1,3,2}, {4,6,5})
2
363c
52b
41a
3
UNDECIDEDa
b
c
CCAS Descr
a
1
&MCAS_Descr
&mcas->status
MCAS(3, {a,c,b}, {1,3,2}, {4,6,5})
63c
52b
41a
3
UNDECIDEDa
b
c

MCAS(3, {a,c,b}, {1,3,2}, {4,6,5})
63c
52b
41a
3
SUCCESSa
b
c
1
2
3
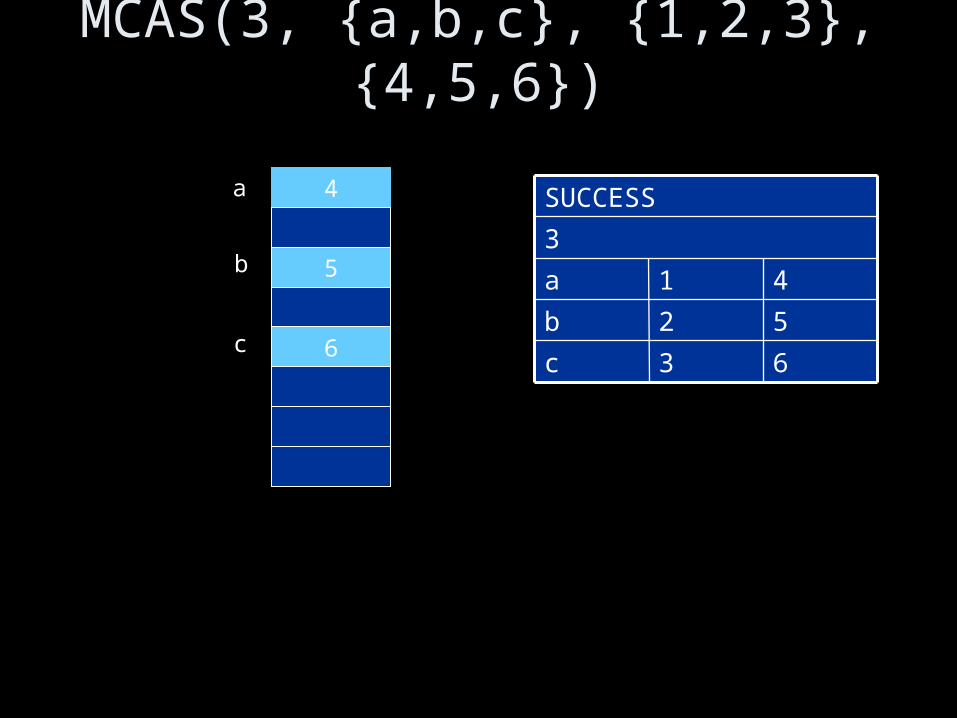
MCAS(3, {a,b,c}, {1,2,3}, {4,5,6})
1
2
363c
52b
41a
3
SUCCESS4
5
6
a
b
c
1
2
3
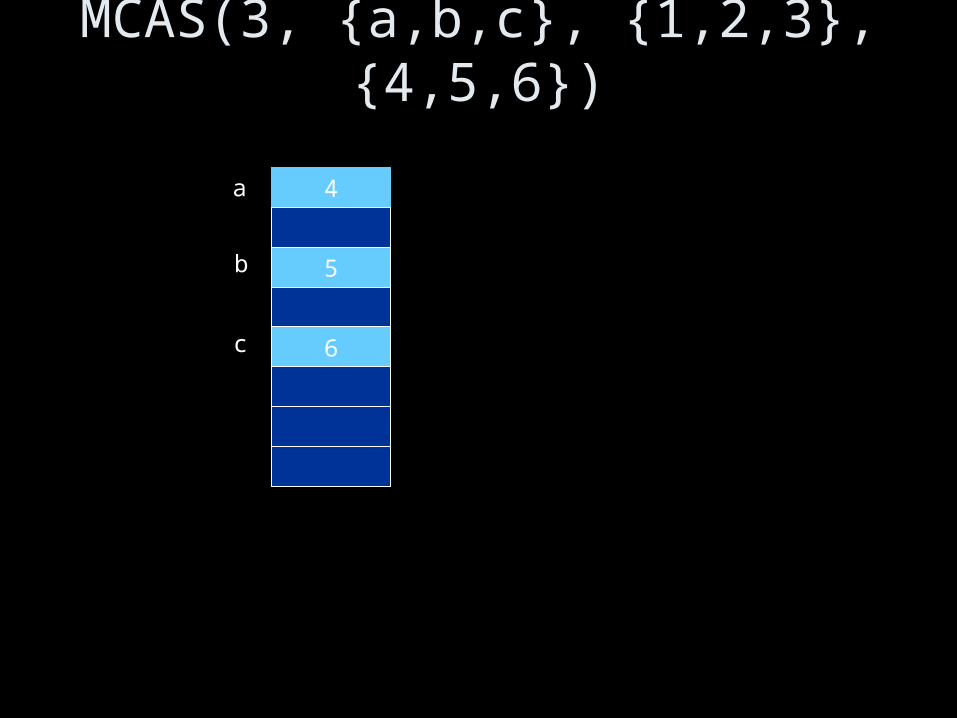
MCAS(3, {a,b,c}, {1,2,3}, {4,5,6})
1
2
3
4
5
6
a
b
c
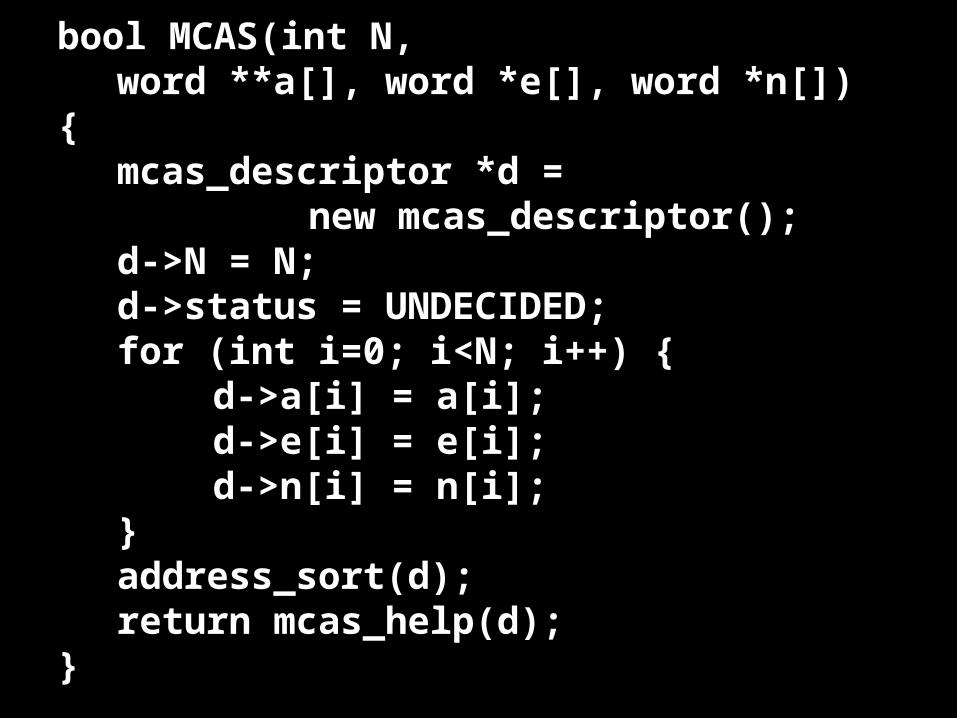
bool MCAS(int N, word **a[], word *e[], word *n[])
{mcas_descriptor *d =
new mcas_descriptor();d->N = N; d->status = UNDECIDED;for (int i=0; i<N; i++) {
d->a[i] = a[i]; d->e[i] = e[i]; d->n[i] = n[i];
}address_sort(d);return mcas_help(d);
}
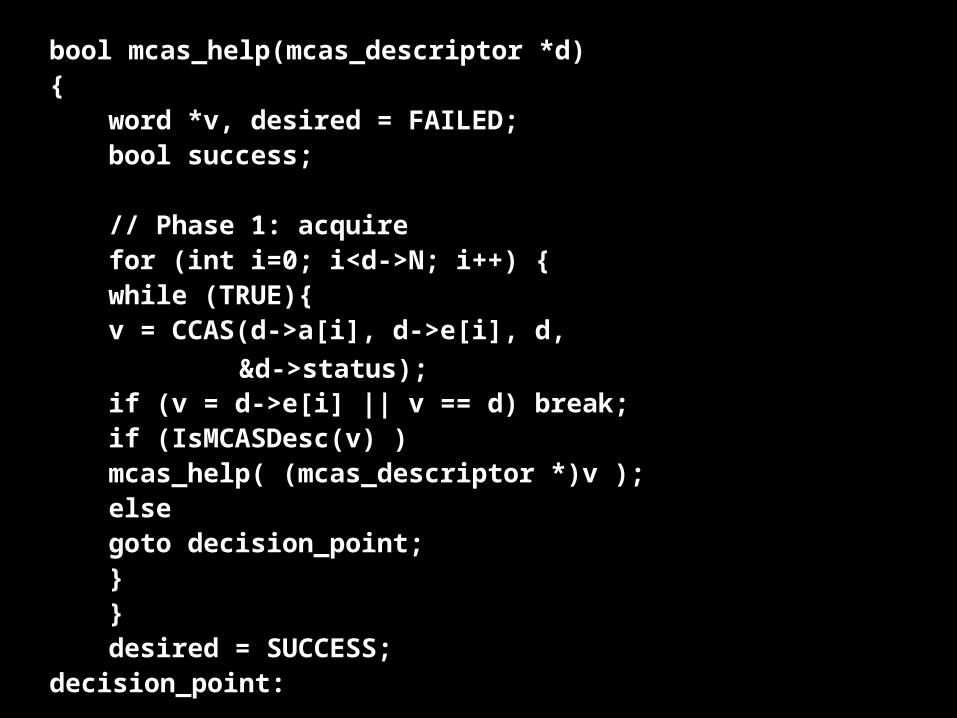
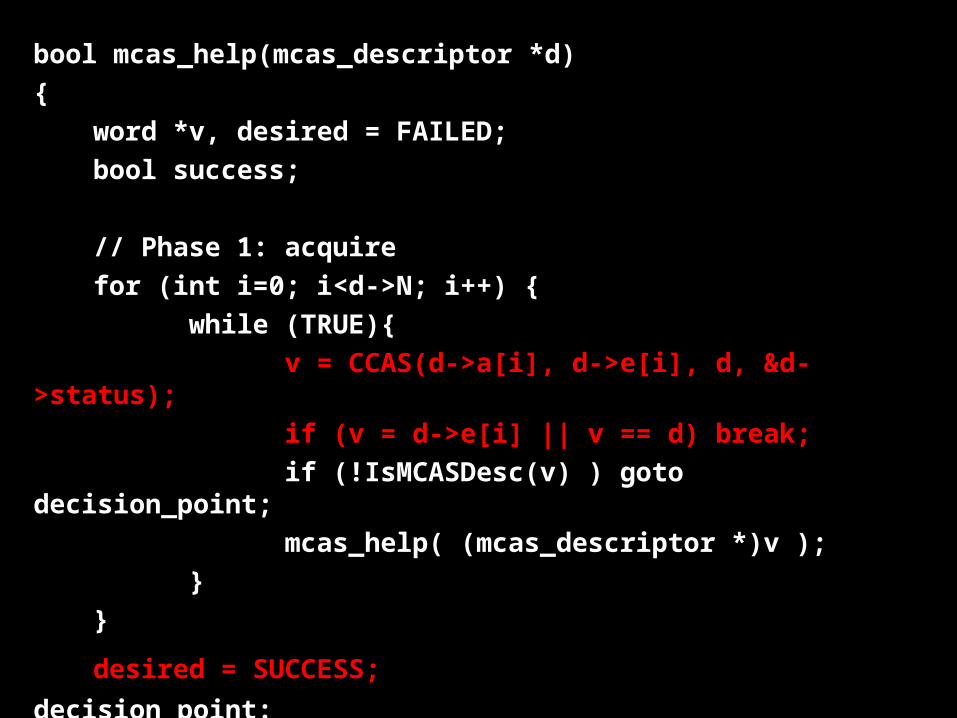
bool mcas_help(mcas_descriptor *d){
word *v, desired = FAILED;bool success;
// Phase 1: acquirefor (int i=0; i<d->N; i++) {
while (TRUE){v = CCAS(d->a[i], d->e[i], d,
&d->status);if (v = d->e[i] || v == d) break;if (IsMCASDesc(v) )
mcas_help( (mcas_descriptor *)v );
elsegoto decision_point;
}}desired = SUCCESS;
decision_point:
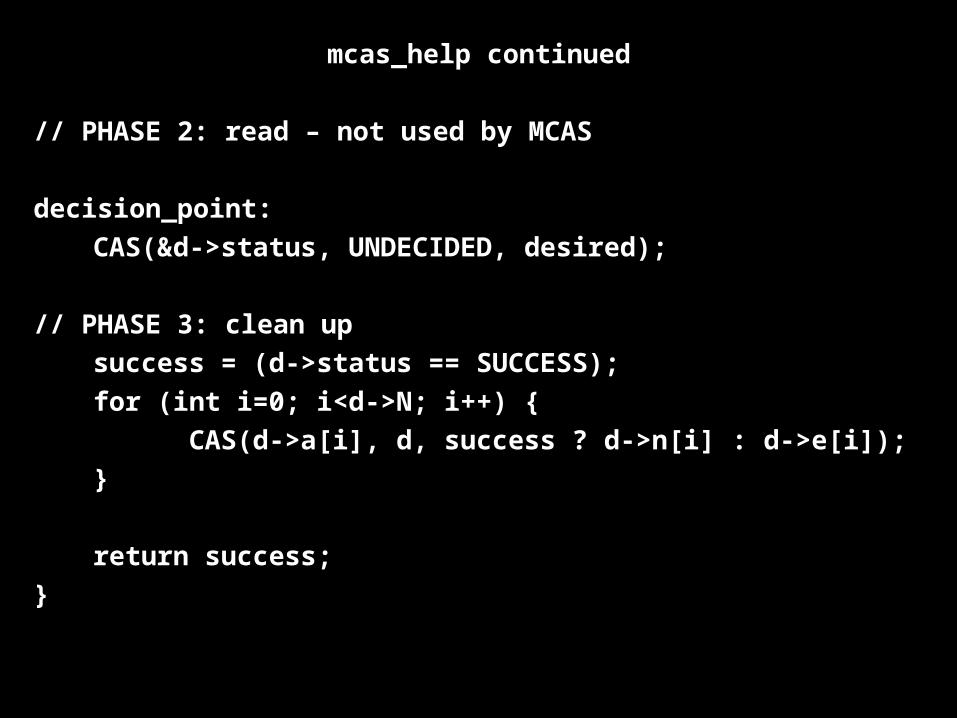
mcas_help continued
// PHASE 2: read – not used by MCAS
decision_point:
CAS(&d->status, UNDECIDED, desired);
// PHASE 3: clean up
success = (d->status == SUCCESS);
for (int i=0; i<d->N; i++) {
CAS(d->a[i], d, success ? d->n[i] : d->e[i]);
}
return success;
}
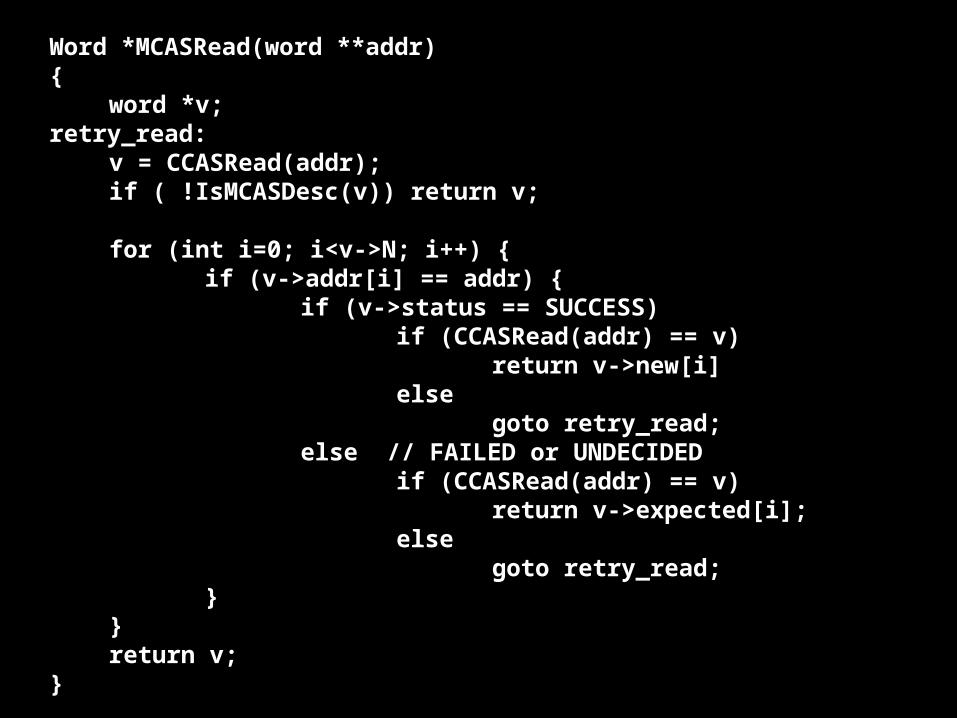
Word *MCASRead(word **addr){
word *v;retry_read:
v = CCASRead(addr);if ( !IsMCASDesc(v)) return v;
for (int i=0; i<v->N; i++) {if (v->addr[i] == addr) {
if (v->status == SUCCESS)if (CCASRead(addr) == v)
return v->new[i]else
goto retry_read;else // FAILED or UNDECIDED
if (CCASRead(addr) == v)return v->expected[i];
elsegoto retry_read;
}}return v;
}

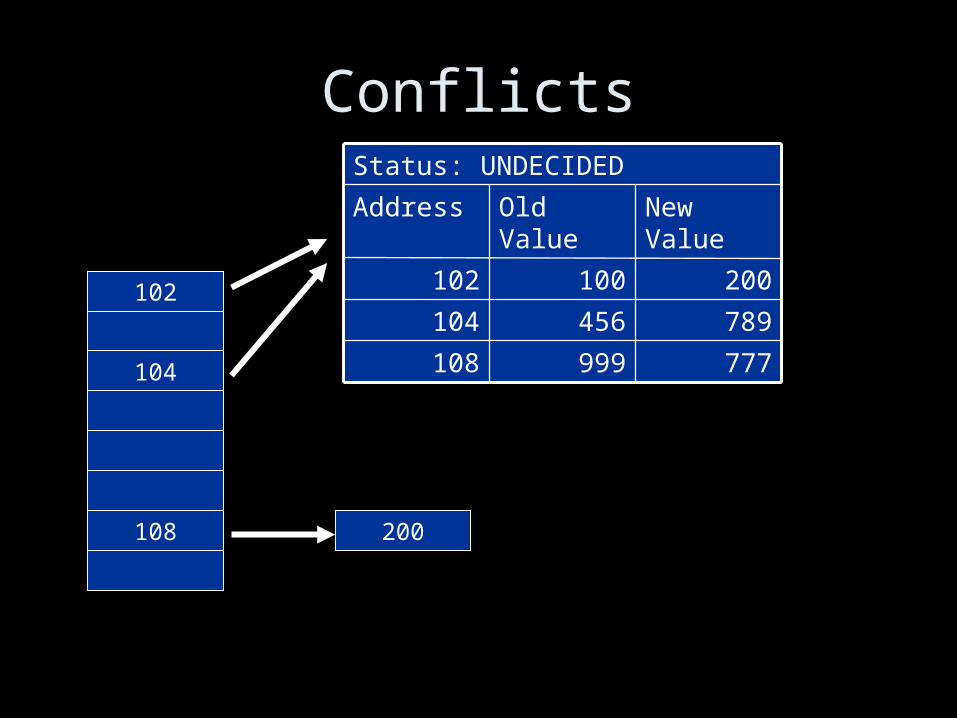
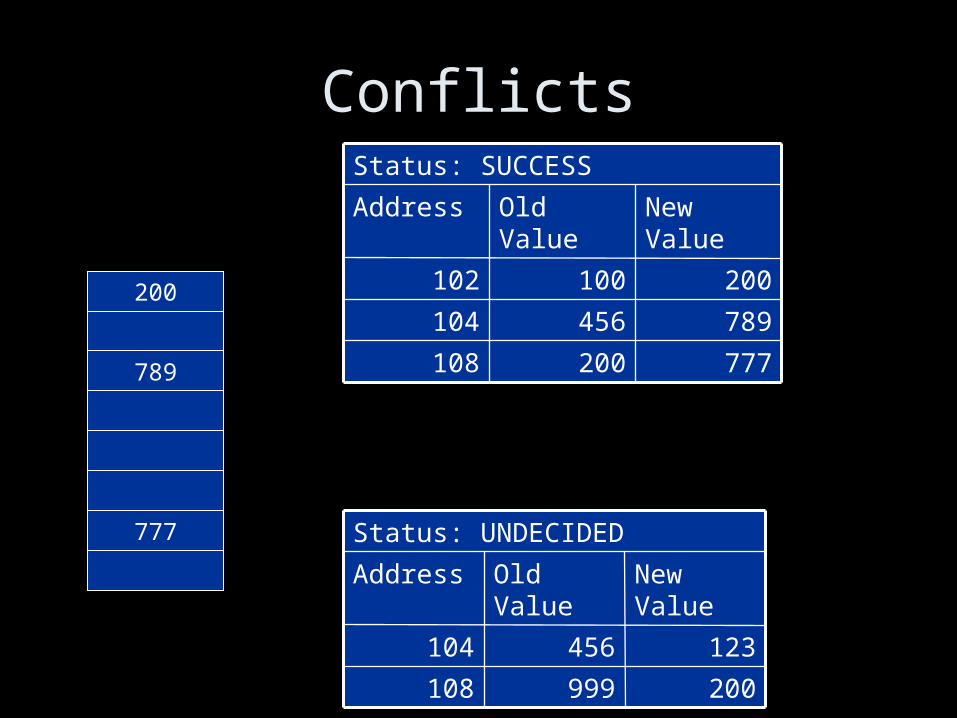
Conflicts
200100102
789456104
777999108
New Value
Old ValueAddress
Status: UNDECIDED
102
104
108
200999108
New Value
Old ValueAddress
Status: UNDECIDED
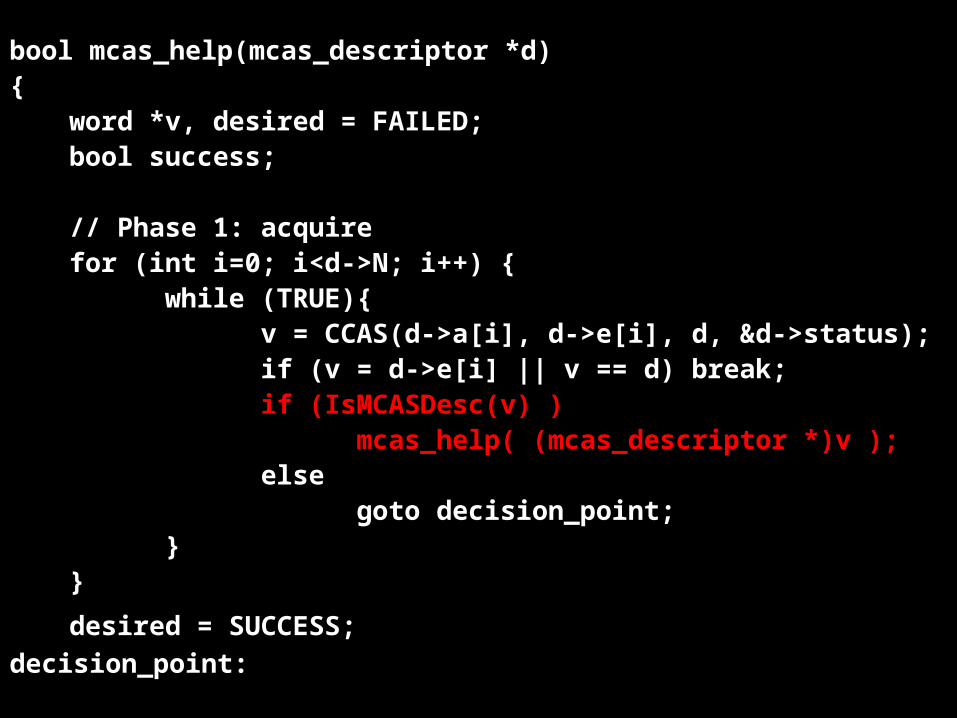
bool mcas_help(mcas_descriptor *d){
word *v, desired = FAILED;bool success;
// Phase 1: acquirefor (int i=0; i<d->N; i++) {
while (TRUE){v = CCAS(d->a[i], d->e[i], d, &d->status);if (v = d->e[i] || v == d) break;if (IsMCASDesc(v) )
mcas_help( (mcas_descriptor *)v );else
goto decision_point;}
}
desired = SUCCESS;
decision_point:

Conflicts
200100102
789456104
777999108
New Value
Old ValueAddress
Status: UNDECIDED
102
104
108
200999108
New Value
Old ValueAddress
Status: UNDECIDED
Conflicts
200100102
789456104
777999108
New Value
Old ValueAddress
Status: UNDECIDED
102
104
108 200
bool mcas_help(mcas_descriptor *d)
{
word *v, desired = FAILED;
bool success;
// Phase 1: acquire
for (int i=0; i<d->N; i++) {
while (TRUE){
v = CCAS(d->a[i], d->e[i], d, &d->status);
if (v = d->e[i] || v == d) break;
if (!IsMCASDesc(v) ) goto decision_point;
mcas_help( (mcas_descriptor *)v );
}
}
desired = SUCCESS;
decision_point:

Conflicts
200100102
789456104
777200108
New Value
Old ValueAddress
Status: UNDECIDED
102
104
108
123456104
200999108
New Value
Old ValueAddress
Status: UNDECIDED
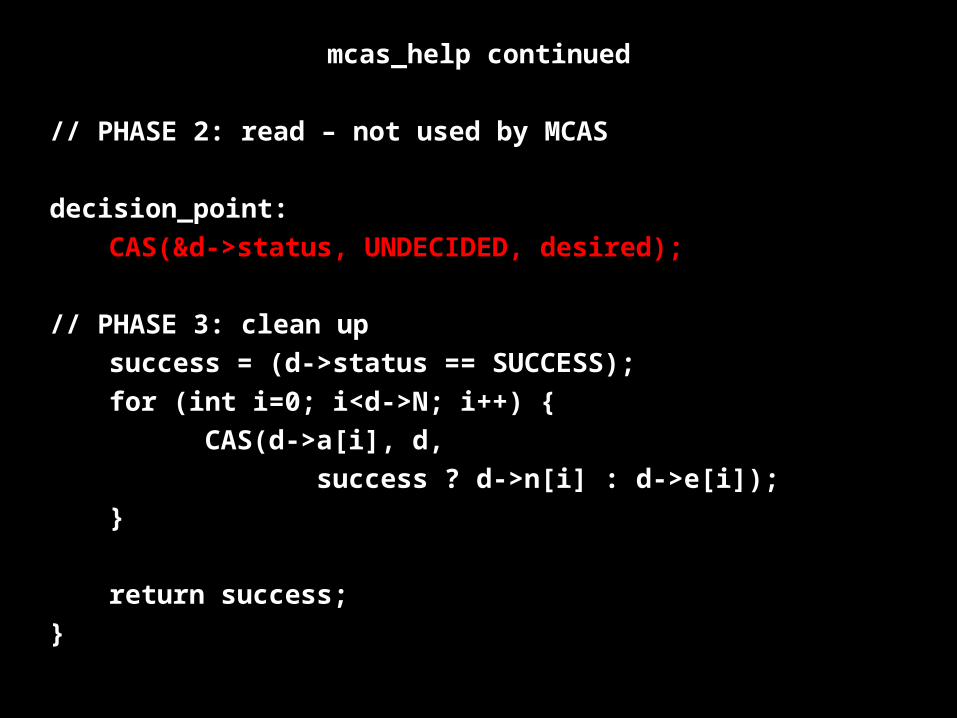
mcas_help continued
// PHASE 2: read – not used by MCAS
decision_point:
CAS(&d->status, UNDECIDED, desired);
// PHASE 3: clean up
success = (d->status == SUCCESS);
for (int i=0; i<d->N; i++) {
CAS(d->a[i], d,
success ? d->n[i] : d->e[i]);
}
return success;
}
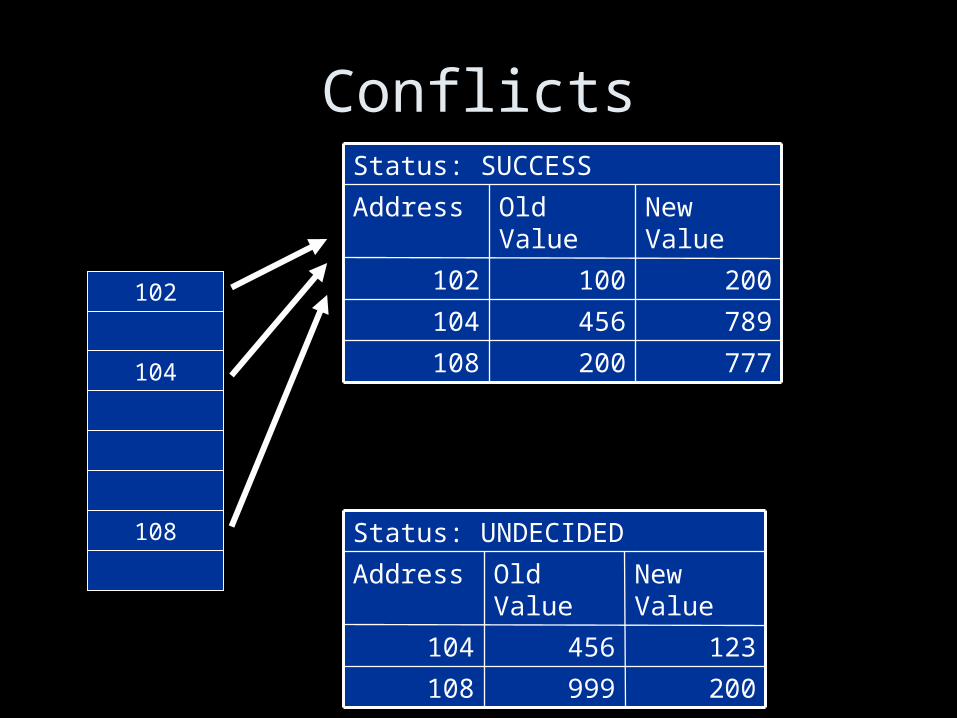
Conflicts
200100102
789456104
777200108
New Value
Old ValueAddress
Status: SUCCESS
102
104
108
123456104
200999108
New Value
Old ValueAddress
Status: UNDECIDED

mcas_help continued
// PHASE 2: read – not used by MCAS
decision_point:
CAS(&d->status, UNDECIDED, desired);
// PHASE 3: clean up
success = (d->status == SUCCESS);
for (int i=0; i<d->N; i++) {
CAS(d->a[i], d,
success ? d->n[i] : d->e[i]);
}
return success;
}
Conflicts
200100102
789456104
777200108
New Value
Old ValueAddress
Status: SUCCESS
200
789
777
123456104
200999108
New Value
Old ValueAddress
Status: UNDECIDED

Failure Modes
• Can fail during any of the CAS attempts– CCAS– CCASHelp

CCAS “failure modes”
• Someone helped us with the CCAS– call CCASHelp with our own descriptor– next time around, return MCAS descriptor– MCAS continues
• Someone else beat us to CCAS– help them with their CCAS– next time around, return their MCAS descriptor– Help with their MCAS– Our MCAS likely aborts
• Source value changed– return new value– MCAS aborts

word *CCAS(word **a, word *e, word *n,
word *cond) {
ccas_descriptor *d = new ccas_descriptor();
word *v;
(d->a, d->e, d->n, d->cond) = (a,e,n,cond);
while ( (v = CAS(d->a, d->e, d)) != d->e ) {
if ( !IsCASDesc(v) ) return v;
CCASHelp( (ccas_descriptor *)v);
}
CCASHelp(d);
return v;
}
void CCASHelp(ccas_descriptor *d) {
bool success = (*d->cond == UNDECIDED);
CAS(d->a, d, success ? d->n : d->e);
}
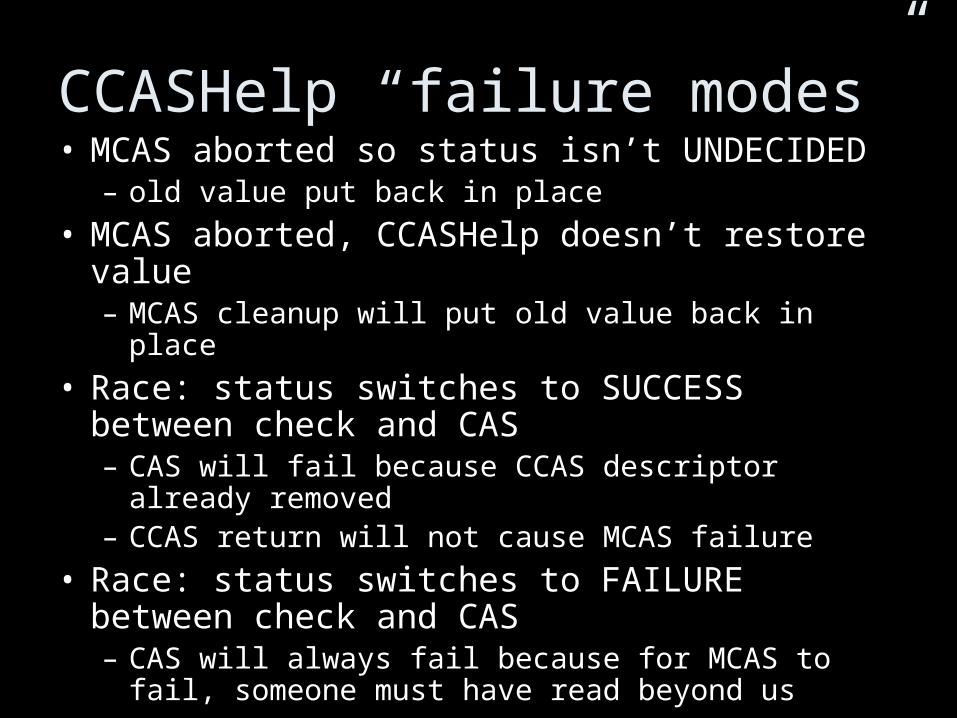
CCASHelp “failure modes”• MCAS aborted so status isn’t UNDECIDED
– old value put back in place
• MCAS aborted, CCASHelp doesn’t restore value– MCAS cleanup will put old value back in place
• Race: status switches to SUCCESS between check and CAS– CAS will fail because CCAS descriptor already
removed– CCAS return will not cause MCAS failure
• Race: status switches to FAILURE between check and CAS– CAS will always fail because for MCAS to fail,
someone must have read beyond us
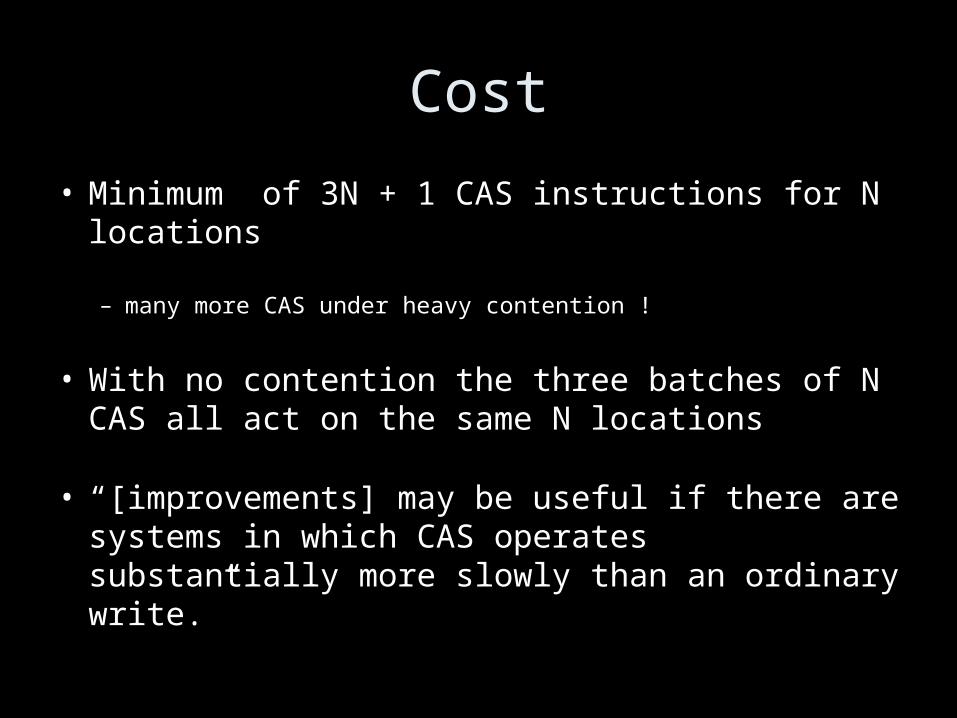
Cost
• Minimum of 3N + 1 CAS instructions for N locations
– many more CAS under heavy contention !
• With no contention the three batches of N CAS all act on the same N locations
• “[improvements] may be useful if there are systems in which CAS operates substantially more slowly than an ordinary write.”
Deep Breath

WSTM
• Remove requirement for space reserved in values being updated– hash addr to find ownership record
• Caller need not keep track of locations– read and write sets stored in transaction
descriptor
• Provides read parallelism
• Obstruction free, not lock free nor wait free
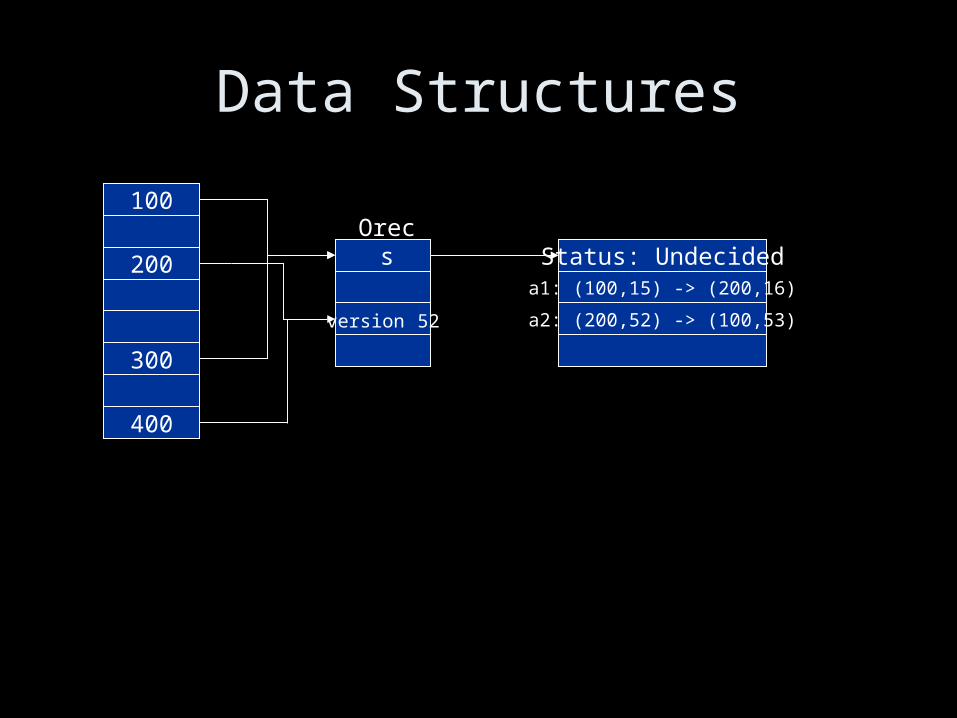
Data Structures
100
200
300
400
version 52
Status: Undecideda1: (100,15) -> (200,16)
a2: (200,52) -> (100,53)
Orecs

Logical contents
• Orec contains a version number:– value comes direct from memory
• Orec contains a descriptor reference– descriptor contains address
• value comes from descriptor based on status
– descriptor does not contain address• value comes direct from memory
Transaction Process
• Call WSTMRead/WSTMWrite to gather/change data– Builds transaction data structure, but it’s NOT
visible
• WSTMCommitTransaction– Get ownership – update ORecs– Read-Check – check version numbers– Decide– Clean up
version 52
version 15
version 53
version 16
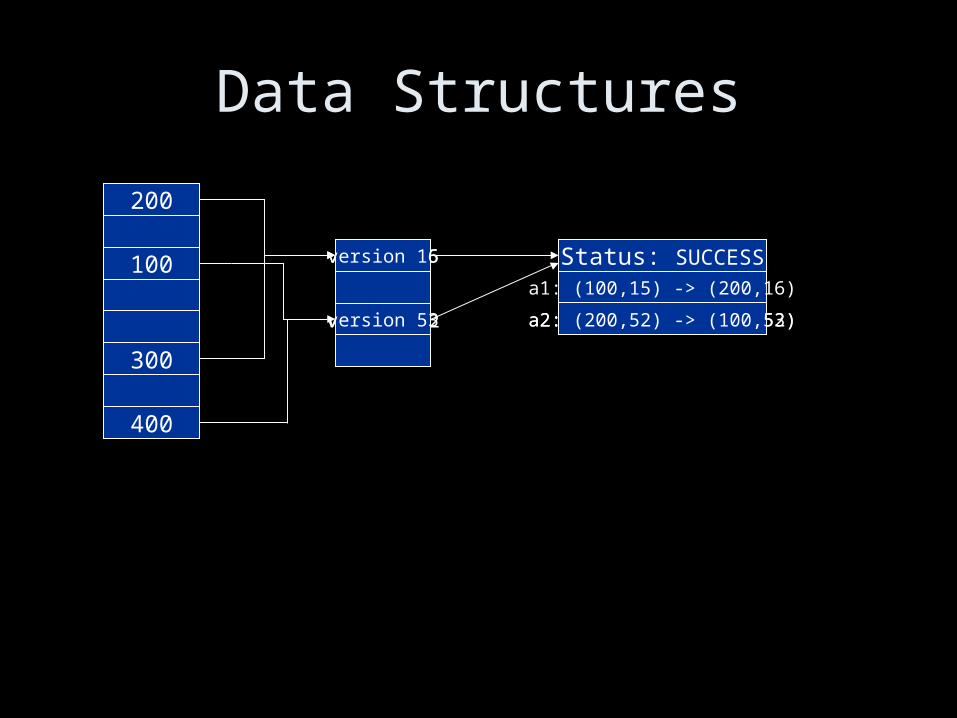
Data Structures
100
200
300
400
Status: UNKNOWN
a1: (100,15) -> (200,16)
a2: (200,52) -> (200,52)a2: (200,52) -> (100,53)
200
100 Status: SUCCESS
Complications
• Fixed number of Orecs
• Hash collisions lead to false sharing
Issues• Orec ownership acts like a lock, so simple
scheme is not even obstruction free• Can’t help with “cleanup” because might
overwrite newer data• Can’t determine value during READCHECK, so
we’re forced to shoot down• force_decision() might be circular causing live
lock• helping requires <complicated> stealing of
transactions
• Uncontended cost is N+2 CAS for N locations
OSTM
• Objects are represented as opaque handles– can’t use pointers directly– must rewrite data structures
• Get accessible pointers via OSTMOpenForReading/OSTMOpenForWriting
• Eliminates need for Orecs/aliasing

Evaluation
• “We use … reference-counting garbage collection”
• Evaluated with one thread/CPU
• “Since we know the number of threads participating in our experiments…”

Uncontended Performance
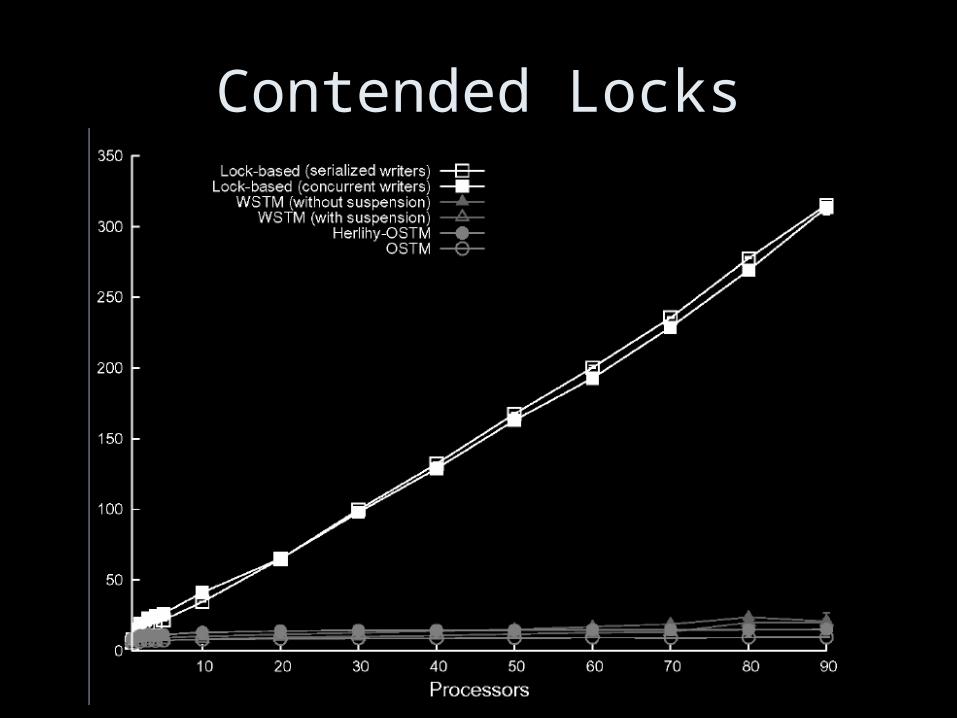
Contended Locks
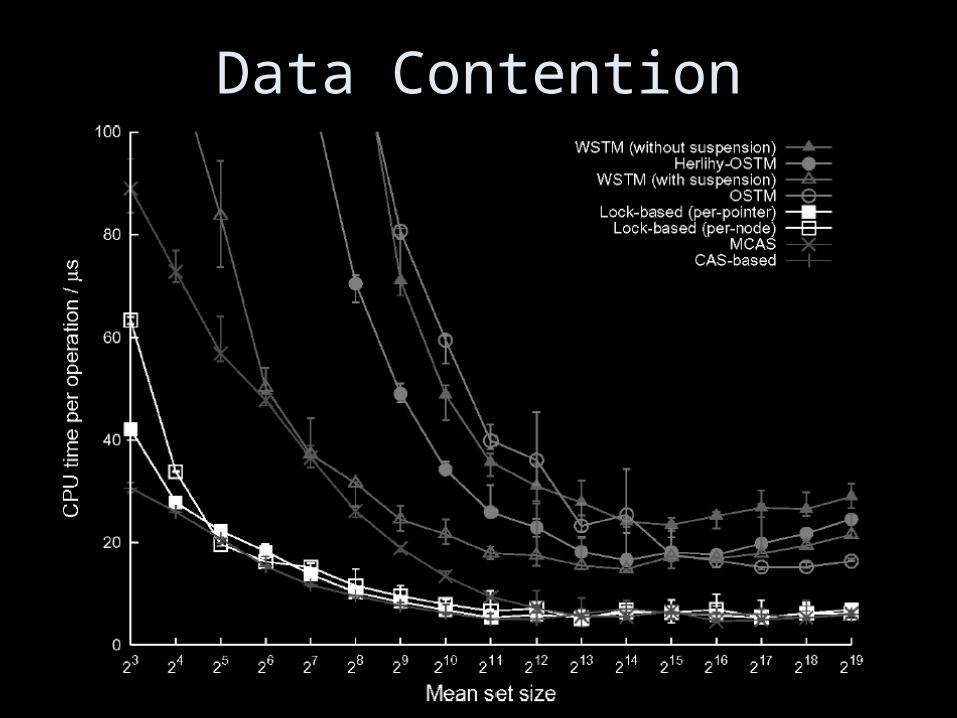
Data Contention

Data/Lock Contention
Spare Slides
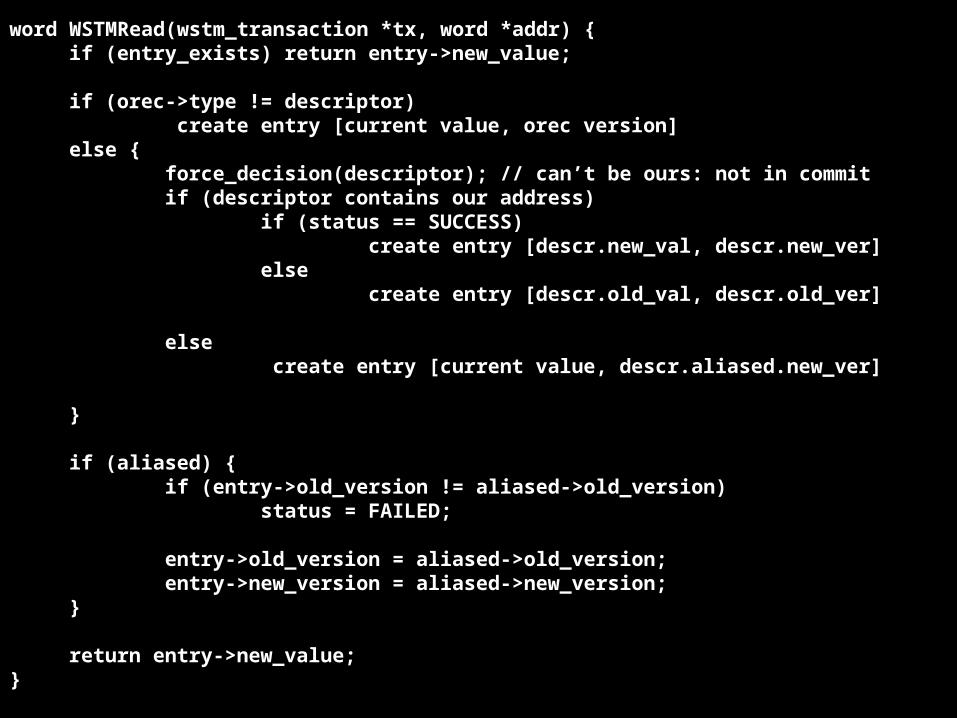
word WSTMRead(wstm_transaction *tx, word *addr) {if (entry_exists) return entry->new_value;
if (orec->type != descriptor) create entry [current value, orec version]
else {force_decision(descriptor); // can’t be ours: not in commitif (descriptor contains our address)
if (status == SUCCESS) create entry [descr.new_val, descr.new_ver]
else create entry [descr.old_val, descr.old_ver]
else create entry [current value, descr.aliased.new_ver]
}
if (aliased) {if (entry->old_version != aliased->old_version)
status = FAILED;
entry->old_version = aliased->old_version;entry->new_version = aliased->new_version;
}
return entry->new_value;}
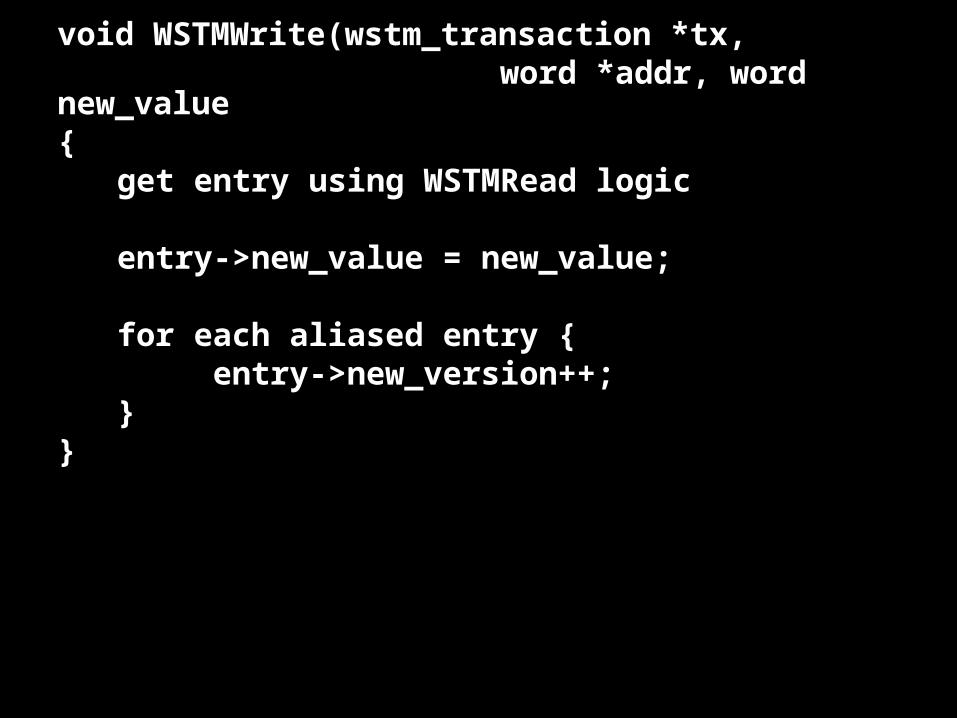
void WSTMWrite(wstm_transaction *tx, word *addr, word
new_value {
get entry using WSTMRead logic
entry->new_value = new_value;
for each aliased entry {entry->new_version++;
}}

bool WSTMCommit(wstm_transaction *tx) {
if (tx->status == FAILED) return false;
sort descriptor entriesdesired_status = FAILED;
for each updateif (!acquire_orec) goto decision_point;
CAS(status, UNDECIDED, READ_CHECK);for each read
if (!read_check) goto decision_point;
desired_status = SUCCESS;
decision_point:

decision_point:status = tx->status;while (status != FAILED && status != SUCCESS) {
CAS(tx->status, status, desired_status);status = tx->status;
}
if (tx->status == SUCCESS)for each update
*addr = entry->new_value;
for each updaterelease_orec
return (tx->status == SUCCESS);}

bool read_check(wstm_transaction *tx, wstm_entry *entry)
{if (orec is WSTM_descriptor) {
force_decision()if (SUCCESS)
version = new_version;else
version = old_version} else {
version = orec_version;}
return (version == entry->old_version);}
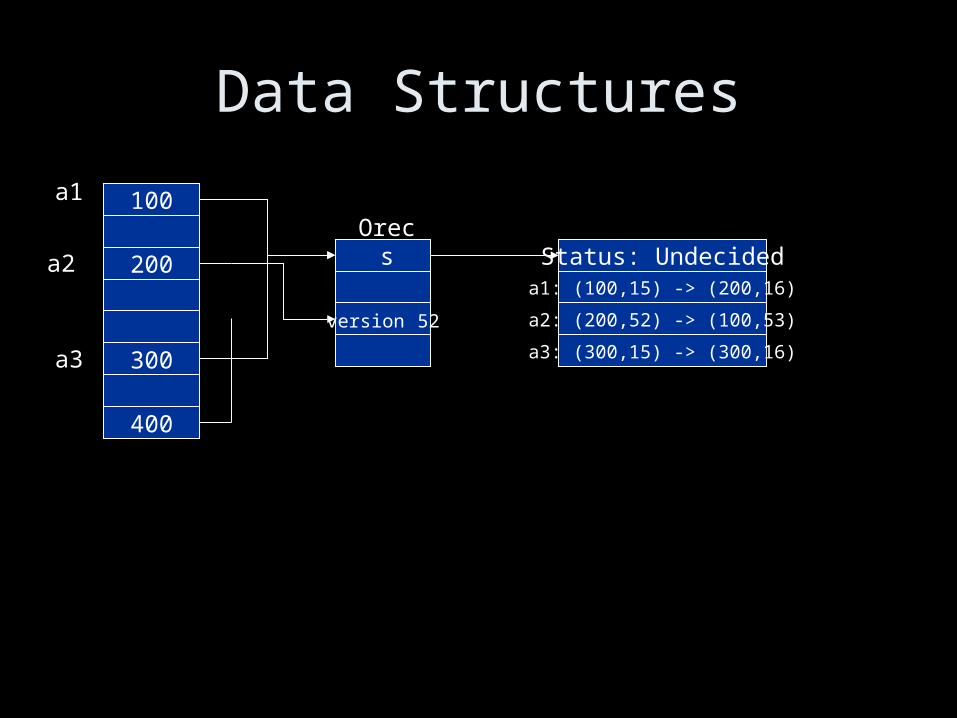
Data Structures
100
200
300
400
version 52
Status: Undecideda1: (100,15) -> (200,16)
a2: (200,52) -> (100,53)
a3: (300,15) -> (300,16)
Orecs
a1
a2
a3
Caveats
• “It remains possible for a thread to see a mutually inconsistent view of shared memory if it performs a series of [read] calls.”
• In other words there is not complete isolation between transactions– a thread may crash due to concurrency prior
to having its transaction abort and retry
Related Documents











