COMPUTER SCIENCE 349A SAMPLE EXAM QUESTIONS WITH SOLUTIONS CHAPTER 1. 1.1 (a) Define the term “ill-conditioned problem”. (b) Give an example of a polynomial that has ill-conditioned zeros. 1.2 Consider evaluation of ) tanh( 1 1 ) ( x x f − = , where x x x x e e e e x − − + − = ) tanh( . If ) ( x f is to be evaluated in floating-point arithmetic (e.g., k = 4 decimal digit, idealized, rounding floating-point), for each of the following ranges of values of x, specify whether the computed floating-point result will be accurate or inaccurate. (a) x is large and positive (for example, 4 > x if k = 4) (b) x is close to 0 (for example, 001 . 0 ≤ x if k = 4) (c) x is large and negative (for example, 4 − < x if k = 4) 1.3 Consider 0 , ) 1 sin( ) 1 sin( ) ( ≠ − + = h h h h g where the arguments for sin are in radians . When h is close to 0, evaluation of ) (h g is inaccurate in floating-point arithmetic. In (a) and (d) below, use 4 decimal digit, idealized, rounding floating-point arithmetic. If x is a floating-point number, assume that ) (sin x fl is determined by rounding the exact value of x sin to 4 significant digits. (a) Evaluate ) ) ( ( h g fl for 00351 . 0 = h . Note that L 843088 . 0 ) 003 . 1 sin( = , L 843625 . 0 ) 004 . 1 sin( = and L 841470 . 0 ) 1 sin( = . (b) Taylor's Theorem can be expressed in two equivalent forms: given any fixed value 0 x ,

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

COMPUTER SCIENCE 349A
SAMPLE EXAM QUESTIONS WITH SOLUTIONS CHAPTER 1. 1.1 (a) Define the term “ill-conditioned problem”. (b) Give an example of a polynomial that has ill-conditioned zeros. 1.2 Consider evaluation of
)tanh(1
1)(x
xf−
= , where xx
xx
eeeex −
−
+−
=)tanh( .
If )(xf is to be evaluated in floating-point arithmetic (e.g., k = 4 decimal digit, idealized, rounding floating-point), for each of the following ranges of values of x, specify whether the computed floating-point result will be accurate or inaccurate. (a) x is large and positive (for example, 4>x if k = 4) (b) x is close to 0 (for example, 001.0≤x if k = 4) (c) x is large and negative (for example, 4−<x if k = 4) 1.3 Consider
0,)1sin()1sin()( ≠−+
= hh
hhg
where the arguments for sin are in radians. When h is close to 0, evaluation of )(hg is inaccurate in floating-point arithmetic. In (a) and (d) below, use 4 decimal digit, idealized, rounding floating-point arithmetic. If x is a floating-point number, assume that
)(sin xfl is determined by rounding the exact value of xsin to 4 significant digits. (a) Evaluate ))(( hgfl for 00351.0=h . Note that L843088.0)003.1sin( = ,
L843625.0)004.1sin( = and L841470.0)1sin( = . (b) Taylor's Theorem can be expressed in two equivalent forms: given any fixed value 0x ,

L+′′′−+′′−
+′−+= )(!3
)()(
!2)(
)()()()( 0
30
0
20
000 xfxx
xfxx
xfxxxfxf
or, using a change of variable (replacing x by hx +0 , so that 0xxh −= is the independent variable),
L+′′′+′′+′+=+ )(!3
)(!2
)()()( 0
3
0
2
000 xfhxfhxfhxfhxf .
Using the latter form of Taylor's Theorem (without the remainder term), determine the quadratic (in h) Taylor polynomial approximation to )1sin( h+ . Note: leave your answer in terms of )1cos( and sin(1); do not evaluate these numerically. (c) Use the Taylor polynomial approximation from (b) to obtain a polynomial approximation, say )(hp , to )(hg . (d) Show that )(hp is much better than )(hg for floating-point evaluation when h is close to 0 by evaluating ))00351.0(( pfl . Note that L841470.0)1sin( = and
L540302.0)1cos( = . 1.4 If fedcba ,,,,, have known values, then
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡fe
yx
dcba
is a system of 2 linear equations in the 2 unknowns x and y. If 0≠− bcad , then the solution is
bcadbfdex
−−
= and bcadceafy
−−
= .
Consider the linear system
⎥⎦
⎤⎢⎣
⎡−−
=⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−−
38.127.0
29.691.423.196.0
yx
.
Show that the problem of computing the solution ⎥⎦
⎤⎢⎣
⎡yx
is ill-conditioned.

1.5 (a) For what values of the real variable x , where 1>x , is the following expression subject to subtractive cancellation that will produce a very inaccurate result (in terms of relative error) using floating-point arithmetic? 1)( −−= xxxf , where 1>x . (b) How should )(xf be evaluated in floating-point arithmetic in order to avoid the subtractive cancellation in (a)? 1.6 Let
0,1)(sin)( 2 ≠+−
= xx
exxfx
.
Note: x is in radians (for the sine function). (a) In the following, use 4 decimal digit, idealized, chopping floating-point arithmetic. If w is a floating-point number, compute )( wefl and )(sin wfl by chopping the exact value of we and wsin , respectively, to 4 significant digits. For the sine function, w is in radians. Evaluate ))123.0(( ffl . Note that L122690.0)123.0sin( = and
L13088.1123.0 =e . (b) To 4 significant digits, the exact value of )123.0(f is -0.5416, so the computation in (a) is inaccurate. In order to obtain a better formula for approximating
)(xf when x is close to 0, use the Taylor polynomial approximations for xe and xsin (both expanded about 00 =x ) in order to obtain a quadratic polynomial approximation for )(xf . Note: if you know these required Taylor expansions, it is not necessary to show their derivations. (c) Use the polynomial approximation for )(xf from (b) (which is accurate when x is close to 0) to show that the computation of ))123.0(( ffl in (a) is unstable.
Note: consider the perturbed problem with ε+= 123.0x̂ , where 123.0ε
is small.
1.7 (a) Use 4 decimal digit, idealized, chopping floating-point arithmetic in the following. If w is a floating-point number, approximate )( 4/1wfl by chopping the exact value of 4/1w to 4 significant decimal digits. The evaluation of
11)(
4/1
−−
=x
xxg
is inaccurate in floating-point arithmetic when x is approximately equal to 1. Verify this by evaluating ))015.1(( gfl . Note that the exact value of 4/1015.1 is L003729.1 . (Using real arithmetic, the exact value of )015.1(g is L2486059.0 .) (b) Determine the second order ( 2=n ) Taylor polynomial approximation for
4/1)( xxf = expanded about x0 = 1. Include the remainder term. Leave this polynomial in terms of expressions involving powers of x −1. (Do not multiply out these powers of x −1.) (c) Substitute the polynomial approximation from (b), without the remainder term, into the formula for g(x) , and simplify in order to obtain a polynomial approximation for g(x) . (This polynomial approximation is accurate using floating-point arithmetic when x is close to 1.) Note: leave this polynomial in terms of expressions involving x −1. (d) Determine a good upper bound for the truncation error of the Taylor polynomial approximation in (b) when 06.195.0 ≤≤ x by bounding the remainder term. Give at least 4 correct significant digits. 1.8 Using idealized, rounding floating-point arithmetic (base 10, precision k = 4 ), the evaluation of ))*()*(( zyfxwff lll − for 68.5631.1261.4300.16 ==== zyxw gives a result of 0.1000 , whereas the exact value is 0.0292 . The relative error of this computed result is 242%. Using the definition of stability given in class, show (by using only a perturbation of y) that the above floating-point computation is stable. CHAPTER 2. 2.1 Let c denote any positive number. (a) Apply Newton’s method to
c
xxf 1)( 2 −=

in order to determine an iterative formula for computing c/1 . (b) For arbitrary 0>c , let 0p be the initial approximation to c/1 , let
{ }L,,, 321 ppp be the sequence of computed approximations to c/1 using the iterative formula from (a), and let
K,3,2,1,0for ,1=−= n
cpe nn
Show (using algebra) that
1
21
2 −
−=n
nn p
ee .
(Note: from this, it follows that 22
1limlim1
21
cpe
e
nn
n
n
n==
−∞→
−∞→
, proving that the iterative
formula in (a) is quadratically convergent.) 2.2 (a) If Newton’s method is used to compute an approximation to a zero of 4880405)( 245 −−−+= xxxxxP using the initial approximation 10 −=p , convergence is obtained to the zero 2−=p of
)(xP . If this computation is carried out, what is the order of convergence? Justify your answer. (b) Give 1 or 2 MATLAB statements that could be used to compute all of the zeros of the polynomial 4880405)( 245 −−−+= xxxxxP using the MATLAB function roots. 2.3 (a) Let R denote any positive number. Apply Newton’s method to
xRxxf −= 2)(
in order to determine an iterative formula for computing 3 R . Simplify the formula so that it is in the form

⎟⎟⎠
⎞⎜⎜⎝
⎛×
)()(
n
nn xh
xgx
where )( and )( nn xhxg are simple polynomials in nx . (b) Consider the case 2=R . Given some initial value 0x , if the iterative
formula in (a) converges to 3 2 , what will be the order of convergence? Very briefly justify your answer, referring to any results from your class notes or the textbook. 2.4 (a) With regard to an algorithm for computing a root p of 0)( =xf , what is the definition of order of convergence? (b) The following sequence of values is converging to a root at p = 1.895494 . What is the order of convergence? n np 0 1.80000 1 1.85078 2 1.87375 3 1.88476 4 1.89016 5 1.89284 6 1.89417 7 1.89483 8 1.89516 9 1.89533 10 1.89541 (c) Could the computed approximations in (b) have been computed using Newton’s method? Justify your answer. 2.5 (a) Show how to evaluate n
n xaxaxaaxP ++++= L2210)(
using nested multiplication. (b) Give pseudocode for the computation in (a).

2.6 A good approximation to one of the zeros of 776)( 234 −−−+= xxxxxP is 64.20 =x . If 0x is used as an approximation to a zero of )(xP , use synthetic division (that is, Horner's algorithm) to determine the associated deflated polynomial. Show all of your calculations. Note: do not do any computations with Newton’s method. 2.7 (a) Fill in the 7 blanks in the following MATLAB code so that the function M-files f.m and secant.m could be used to compute one zero of xexxf −−= sin)( using the Secant method. The function M-file secant.m has the following input parameters: initial approximations p0 and p1 maximum number of iterations N error tolerance tol and it prints each successive computed approximation to a zero of )(xf . If the function doesn’t converge within N iterations, then an error message is printed. The M-file f.m : function y = f(x) y = _____________________________________ ; The M-file secant.m : function secant ( p0, p1, N, tol ) i = 2; q0 = f(p0); q1 = f(p1); while i <= N p = __________________________________________ ; fprintf('i = %g',i),fprintf(' approximation = %18.10f\n',p) if _____________________ < tol return end i = i+1; p0 = _______________________ ; q0 = _______________________ ; p1 = _______________________ ; q1 = ________________________ ; end fprintf('method failed to converge in %g',N),fprintf(' iterations\n') (b) If the above MATLAB M-files f.m and secant.m are used to compute one zero of

xexxf −−= sin)( with initial approximations p0 = 0 and p1 = 1, N = 20 and tol = 610− , then a computed approximation of p = 0.5885327440 is obtained. What is the order of convergence for this computation of this zero of )(xf ? Briefly justify your answer using results given in class. 2.8 Use Taylor’s Theorem to derive Newton’s method for computing a root a
0)( =xf . CHAPTER 3. 3.1 (a) Give the Lagrange form of the quadratic ( 2=n ) interpolating polynomial
)(xP that interpolates xexf −=)( at 4.0 and 2.0,0 === xxx . Note: Do not numerically evaluate )(xf ; instead, give your answer in terms of values such as 2.0−e . Also, do not simplify the expression for )(xP . (b) Using the error term for polynomial interpolation, determine a good upper bound for 1.0)1.0( −− eP . Note: Do not determine an upper bound for xexP −−)( for all ]4.0,0[∈x , only for
1.0=x . 3.2 Let )(xP denote the (linear) polynomial of degree 1 that interpolates
xxf cos)( = at the points 1.0 and 1.0 10 =−= xx (where x is in radians). Use the error term of polynomial interpolation to determine an upper bound for )()( xfxP − , where
]1.0,1.0[−∈x . Do not construct )(xP . 3.3 (a) Fill in the blanks below so that the following MATLAB statements could be used to compute the value of )(πPz = , where )(xP is the piecewise linear interpolating polynomial that interpolates )(xnxy l= at 31 equally-spaced points 0.4,,2.1,1.1,1 31321 ==== xxxx K in the interval [1, 4]. X = linspace ( ___________ , ____________ , ____________ ) ; Y = ___________________________________ ; z = interp1 ( ___________ , ____________ , ___________ , ‘linear’ )

(b) Use the error term for polynomial interpolation to determine a good upper bound for the error when )()( xnxxf l= is approximated by the above piecewise linear interpolating polynomial )(xP , where x is any value in [3, 3.1]. That is, determine a value of ε such that ]1.3,3[ever when)()( ∈≤− xxPxnx εl . 3.4 Determine values for the parameters edcba and ,,, so that
⎩⎨⎧
≤≤++≤≤−++
=10,01,
)( 2
2
xedxcxxbxax
xQ
is a quadratic spline function that interpolates )(xf , where 1)1(,1)0(,1)1( ===− fff . Show all of the equations that the unknowns must satisfy, and then solve these equations. 3.5 Determine 1111000 and ,,,,, dcbadba so that
⎩⎨⎧
≤≤+++≤≤−+−+
=10,01,3
)( 31
2111
30
200
xxdxcxbaxxdxxba
xS
is the natural cubic spline function such that 1)1(and2)0(,1)1( −===− SSS . Clearly identify the 8 conditions that the unknowns must satisfy, and then solve for the 7 unknowns. SECTIONS 4.1 AND 4.2 4.1 Construct the Taylor polynomial approximations of order 3 (with their remainder terms simply written as )( 4hO ) for both of )2( and )( 00 hxfhxf ++ expanded about
0x . Derive a numerical differentiation formula for )( 0xf ′ (and its truncation error term in a form )( khO ) as follows: substitute the above Taylor polynomial approximations (with their remainder terms) into the expression )2()(4)(3 000 hxfhxfxf +−++− and solve for )( 0xf ′ .

4.2 It can be shown that
,22lim
/1
0e
hh h
h=⎟
⎠⎞
⎜⎝⎛
−+
→
where L7182818.2=e . If
h
hhhN
/1
22)( ⎟
⎠⎞
⎜⎝⎛
−+
=
denotes a formula for approximating the value of e, then it can be shown that the truncation error of this approximation is of the form L+++ 6
64
42
2 hKhKhK for some constants iK ; that is, L++++= 6
64
42
2)( hKhKhKhNe . Note that
718372.202.0202.02)02.0(
718644.204.0204.02)04.0(
02.0/1
04.0/1
=⎟⎠⎞
⎜⎝⎛
−+
=
=⎟⎠⎞
⎜⎝⎛
−+
=
N
N
Apply Richardson's extrapolation to the above two values in order to obtain an )( 4hO approximation to the value of e.
4.3 Fill in the three blanks in the following Richardson’s Extrapolation table, given that the truncation error of the formula )(1 hN is of the form L+++ 6
34
22
1 hKhKhK for some constants iK . h )(1 hN
0.45 2.766013
0.15 2.723401 _________________ 0.05 2.718848 _________________ ___________________ Show the formulas that you use to compute these three entries.

4.4 (a) Let 0>h . Suppose you are given 3 values of a function )(xf , namely
)(),0( hff and )3( hf . Construct )(xP , the Lagrange form of the interpolating polynomial at the three points hhx 3 and ,0= . Then differentiate )(xP in order to obtain a numerical differentiation formula )(xP′ for approximating )(xf ′ . (This formula will be a function of x, h and the values )(),0( hff and )3( hf .) (b) Given the following data:
15.015.011.005.012.00
)(xfx
use the numerical differentiation formula from (a) to approximate )0(f ′ by )0(P′ . SECTIONS 4.3-4.6 4.5 Determine the degree of precision of the quadrature formula
( ))3()(34
3 hfhfh+
which is an approximation to ∫h
dxxf3
0
)( . Show all of your work.
4.6 The open Newton-Cotes quadrature formula for 3=n is
[ ])(11)()()(11245)( 3210
4
1
xfxfxfxfhdxxfx
x
+++≈∫−
.
Use this formula to approximate
dxx
x∫− −
1
121)cos( ,
given the following values:

013345.15.0031670.16.0070993.17.0161179.18.0426071.19.0
1/)cos( 2
±±±±±
− xxx
000000.10.0000017.11.0000276.12.0001465.13.0004960.14.0
1/)cos( 2
±±±±
− xxx
4.7 Consider approximating ∫b
a
dxxf )( using Romberg integration. Denote the
Romberg table by
OMMM3,32,31,3
2,21,2
1,1
RRRRR
R
where
1,kR = the trapezoidal rule approximation to ∫b
a
dxxf )( using 12 −k subintervals on
[a,b] . Use 1,21,1 and RR and Richardson extrapolation to show that 2,2R is equal to the Simpson
rule approximation to ∫b
a
dxxf )( .
4.8 If
∫b
a
dxxf )(
is approximated by the Composite Simpson's rule (that is, using m applications of
Simpson's rule on ],[ ba with stepsize m
abh2−
= ) , then the truncation error is
)(180
)( )4(4 μfhab −− ,

for some ),( ba∈μ . Use this error term in order to determine the smallest value of m for which the truncation error is guaranteed to be 810−≤ when the Composite Simpson's rule is used to approximate
dxx∫
5.1
5.0
1 .
4.9 The MATLAB function quad uses a recursive adaptive quadrature algorithm based on Simpson's rule. Fill in the blanks in the following MATLAB statements so that they could be used to approximate
dxexx x∫ −−4
0
5.1)1(13
using the MATLAB function quad and a relative error tolerance of 410− . function y = f(x) y = _________________________________________ ; quad ( _________ , ________, _________, _________ ) 4.10 (a) If Simpson’s rule is applied 1≥m times on subintervals of ],[ ba , the resulting composite Simpson’s rule approximation is of the following form:
⎟⎟⎠
⎞⎜⎜⎝
⎛+++≈ ∑ ∑∫
= =
p
j
q
jmtr
b
a
ffcfcfchdxxf
1 12320
1
)( ,
where m
abh2−
= and )()( khafxff kk +== . Specify the values of the parameters
trqpccc and ,,,,, 321 . (b) Given that a MATLAB function )(xf has been defined, fill in the blanks in the following MATLAB function comptrap so that it will implement the composite Simpson’s rule.

function approx = comptrap (a , b , m) h = __________________ ; sum1 = 0 ; for j = 1 : _________ sum1 = sum1 + f ( _______________ ) ; end sum2 = 0 ; for j = 1 : _______________ sum2 = sum2 + f ( ________________ ) ; end approx = ( h / _____ )*( f(a) + ____________ + ___________ + f(b) ) ; 4.11 Suppose that only the following values of )(xf are known:
153.0033.0328.0683.00.1)(0.175.05.025.00
−xfx
As in the Adaptive Quadrature algorithm based on Simpson’s rule, compute two
approximations 21 and SS to ∫=1
0
)( dxxfI , and estimate (as in the Adaptive Quadrature
algorithm) the error of the computed approximation 2S . SECTIONS 5.1-5.5 5.1 Consider the initial-value problem
( )
2)1(
,1)( 2
−=
+=′
y
yyt
ty
(a) Use the Taylor method of order n = 2 with h = 0.1 to approximate y(1.1). Show all of your work and the iterative formula. (b) Approximate y(1.1) using h = 0.1 and the following second-order Runge-Kutta method:
( ))),(,(),(2 11 iiiiiiii wthfwtfwtfhww +++= ++
(c) What is the order of the local truncation error of the Runge-Kutta method in (b) (as a function of h)? No justification required.

5.2 Consider the initial-value problem 1)2(,)(1)( 2 =−+=′ yytty . If the solution to this problem is approximated using Euler’s method with a fixed stepsize of 01.0=h on [2, 2.04], then the following computed approximations iw are obtained (and the corresponding exact solution is given by )( ity ):
078462.1078829.104.2059126.1059409.103.2039608.1039801.102.2019910.102.101.2
0.10.100.2)( iii tywt
(a) What is the global truncation error at t = 2.04? (Give an exact numeric answer.) (b) Give an expression (in terms of the function f with numeric arguments) for the local truncation error at t = 2.04 . (Do not attempt to evaluate this expression.) (c) Fill in the blanks in the following MATLAB statements so that they could be used to invoke the MATLAB ode solver ode45 to approximate )(ty on [2, 4], displaying the values of all computed approximations wi and all ti : function z = f(t, y) z = _______________________________________ ; ____________ = ode45( _________ , ___________ , ________ ) 5.3 Consider the initial-value problem 1)2(,)(1)( 2 =−+=′ yytty . If the solution to this problem is approximated using the Runge-Kutta method
( ))),(,(),(2 11 iiiiiiii wthfwtfwtfhww +++= ++
with a fixed stepsize of 01.0=h on [2, 2.04], then the following computed approximations iw are obtained (and the corresponding exact solution is given by
)( ity ):

07846154.107845974.104.205912621.105912483.103.203960784.103960689.102.201990099.101990050.101.2
0.10.100.2)( iii tywt
(a) What is the global truncation error at t = 2.04? (Give an exact numeric answer.) (b) Give an expression (in terms of the function f with numeric arguments) for the local truncation error at t = 2.04 . (Do not attempt to evaluate this expression.) 5.4 (a) Give the iterative formula for the Taylor method of order 2=n for approximating the solution of the initial-value problem
2)1(,)(1)( =+=′ yttyty .
(Determine any required derivatives.) (b) Complete the specification of the following MATLAB M-file taylor.m so that it will compute an approximate solution to the above initial-value problem on [1, 2] using a step size of 01.0=h and the Taylor method of order 2=n . Instead of using one-dimensional arrays to store the values ii wt and , this M-file uses only two (scalar) variables, t and w (that is, w is initialized to 0w , the computed approximation 1w is also stored as w and is printed, then the computed approximation 2w is stored as w and printed, and so on). Do not print any of the values of t. function taylor t = 1 ; w = 2 ; h = 0.01 ; for i = end

SECTIONS 6.1-6.4 6.1 Consider the following data:
321101
)(−
ii xfx
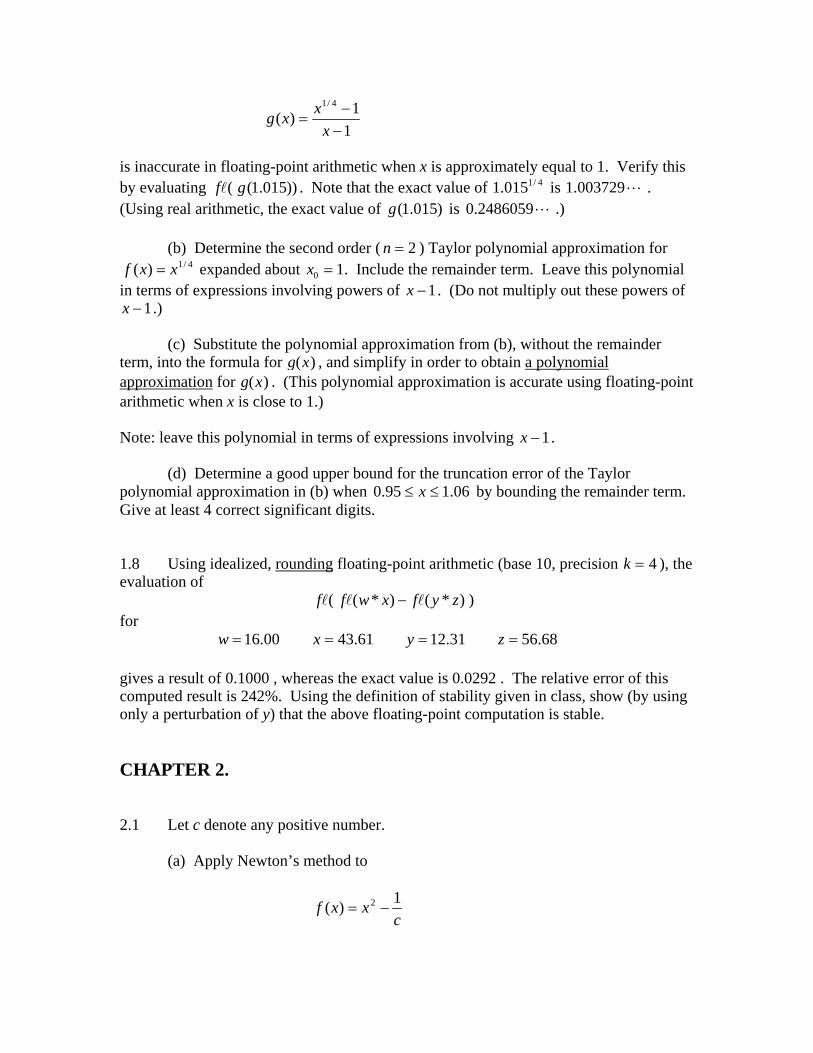
Suppose that a function )(xg of the form xx ececcxg 210)( ++= − is to be determined so that )(xg interpolates the above data at the specified points ix . Write down a system of linear equations (in matrix/vector form bAc = ) whose solution will give the values of the unknowns 210 and , ccc that solve this interpolation problem. Note: Leave your answer in terms of e and powers of e . Do not solve the resultant linear system. 6.2 Suppose that a computer program, using the Gaussian elimination algorithm, is to be written to accurately solve a system of linear equations bAx = , where A is an arbitrary nn× nonsingular matrix. Give two reasons why it is necessary to incorporate a pivoting strategy (such as partial pivoting) into the algorithm. 6.3 Let
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−=
35.01
,220101012
bA
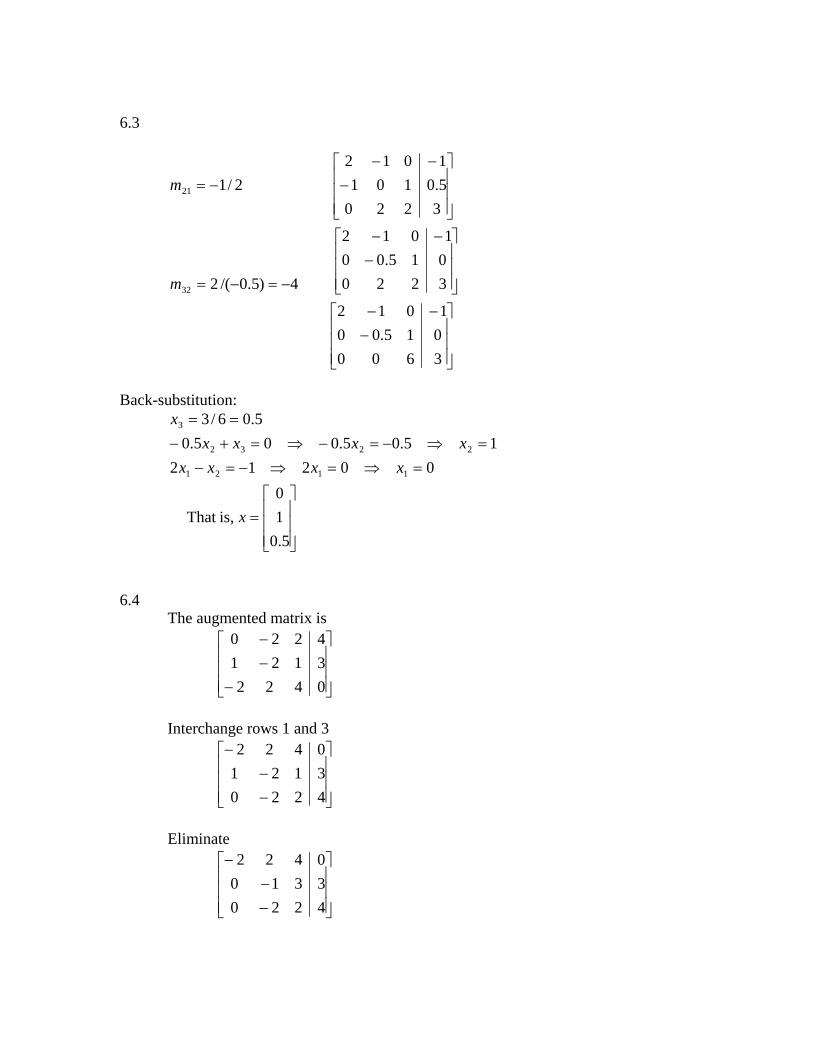
and suppose that bAx 1−= . Use Gaussian elimination without pivoting to compute x. Do not compute 1−A . Show all of your work. 6.4 Consider the following system of linear equations bAx = :
0422
32422
321
321
32
=++−=+−=+−
xxxxxxxx
Specify the augmented matrix for this linear system, and use Gaussian elimination with partial pivoting to compute the solution vector x. Show all of your work.

6.5 Suppose that the following MATLAB statement has been executed. A = [-1 2 3 4 ; 5 6 7 8 ; 9 8 7 6 ; 5 4 3 1 ] ; Specify 1 or 2 MATLAB statements that could be used to efficiently compute the second column vector of 1−A . Do not compute the entire matrix 1−A . 6.6 Let 2≥n , let A denote an nn× nonsingular, upper triangular matrix:
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
Ο=
nn
n
n
n
a
aaaaaaaaa
AMO
L
L
L
333
22322
1131211
,
and let T
nyyyyy ),,,,( 321 K= denote a column vector with n entries. The most efficient way to compute yAx 1−= is to use the back-substitution algorithm. Assuming that n, A and y are specified, write a MATLAB function M-file function x = solve ( n , A , y ) that will compute yAx 1−= using the back-substitution algorithm. Note: do not use the MATLAB operator \ or the MATLAB function inv.

SOLUTIONS CHAPTER 1. 1.1 (a) A problem is ill-conditioned if its exact solution can change greatly with a small change in the data defining the problem. (b) 5)1()( −= xxP 1.2 (a) inaccurate, since tanh(x) is approximately equal to 1. (b) accurate, since tanh(x) is approximately equal to 0 (although ))(tanh(xfl may not be too accurate) (c) accurate, since tanh(x) is approximately equal to 1− . 1.3 (a)
5983.0)598290.0()00351.0/0021.0()/))1sin()1((sin(102100.0or002100.0or0021.0)8415.08436.0())1sin()1(sin(
8415.0)841470.0())1(sin(8436.0)843625.0()004.1())1(sin(
004.1)00351.1()00351.01()1(
2
===−+×=−=−+
=====+
==+=+
−
Llll
ll
Lll
Llll
lll
ffhhffhf
ffffhfffhf
Note: exact value of )(hg is 0.538824... and the relative error in the above
computed approximation is 11.0538824.0
5983.01 ≈− or 11%.
(b)
))1sin((2
)1cos()1sin()1sin(2
−++≈+hhh
(c)
)1sin(2
)1cos()1sin()1sin(
2)1cos()1sin(
)(
2
hh
hhhp −=
−⎟⎟⎠
⎞⎜⎜⎝
⎛−+
=

(d)
5388.0)538823.0()001477.05403.0())1sin()2/()1(cos(101477.0or 001477.0)0014768325.0()8415.0001755.0())1sin()2/((
8415.0)841471.0())1(sin(101755.0or001755.0)2/00351.0()2/(
5403.0)540302.0()1(cos(
2
2
==−=−×==×=×
==×==
==
−
−
lll
lll
Lll
ll
Lll
ffhfffhf
fffhfff
which has all 4 significant digits correct.
1.4 Almost any perturbation of the 6 constants in the data ⎥⎦
⎤⎢⎣
⎡−−
⎥⎦
⎤⎢⎣
⎡−−
38.127.0
,29.691.423.196.0
will do: for example,
⎥⎦
⎤⎢⎣
⎡−−
=⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−−
38.127.0
ˆˆ
29.689.423.1961.0
yx
has exact solution ⎥⎦
⎤⎢⎣
⎡−≈
196.003.0
whereas the given system has solution ⎥⎦
⎤⎢⎣
⎡11
.
1.5 (a) For x sufficiently large and positive. (Note that there is no problem when
1≈x since then 1))(( ≈xffl , which is accurate.)
(b) ( )1
1111)(
−+=
−+−+
×−−=xxxx
xxxxxf
1.6 (a)
4629.0)462962.0()01512.0/007.0())((01512.0)015129.0()(
007000.0or 007.)1007.1()1(sin007.1)0074.1()130.11226.0()(sin
130.1...)13088.1()(1226.0...)122690.0()(sin
2
−=−=−===
−−=+−=+−
−=−=−=−
==
==
flflxfflflxfl
flexflflflexfl
fleflflxfl
x
x
x

(b)
24321
2432
24621
6)(
24621,
6sin
2
2
432
2
4323
4323
xxx
xxxx
xxxxxxxf
xxxxexxx x
−−−=
−−−=
⎟⎟⎠
⎞⎜⎜⎝
⎛++++−−
≈
++++≈−≈
(c)
4629.0123.0
solution computedproblemgiven −=
→x
ε+=
+−=→
123.0ˆˆ
1ˆsin)ˆ(problem perturbed 2
ˆ
xx
exxfx
And
small. is 123.0
such that allfor 5416.0
)(34358.054163.024
)123.0(3
123.021
0 toclose is ˆ if 24ˆ
3ˆ
21)ˆ(
2
2
2
εε
εε
εε
−≈
+−−=
+−
+−−=
−−−≈
O
xxxxf
Since this is not close to 4629.0− for all small ε , the computation is unstable. 1.7 (a)
0
1
24/1
4/1
102000.0or 2.0)015.0/003.0())((101500.0or 015.0)000.1015.1()1(
103000.0or 003.0)000.1003.1()1(003.1)003729.1()(
×==
×=−=−
×=−=−
==
−
−
ll
ll
ll
Lll
fxgffxf
fxffxf

(b)
4/11
4/7
4/3
4/1
6421)(
16/3)1(163)(
4/1)1(41)(
1)1()(
−
−
−
=′′′
−=′′−=′′
=′=′
==
xxf
fxxf
fxxf
fxxf
Thus
[ ] 34/112
32
)1()(128
7)1(323)1(
411
)1(!3
))(()1(!2
)1()1()1()1()(
−+−−−+=
−′′′
+−′′
+−′+=
− xxxx
xxfxfxffxf
ξ
ξ
(c)
)1(323
41
1
1)1(323)1(
411
11)(
24/1
−−=−
−−−−+≈
−−
= xx
xx
xxxg
(d)
[ ] [ ]
0.0000136 approx. is which ,)106.1()95.0(
1128
7
)1(max)(max128
7)1()(128
7
34/11
3
06.195.0
4/11
06.1)(95.0
34/11
−≤
−≤−≤≤
−
≤≤
− xxxxxx
ξξξ
1.8 To show stability, find a value ε for which the exact value of )68.56()31.12()61.43()00.16( ε+− is approx. equal to 0.1 By continuity, any such value must be approx. equal to the value ε such that 1.0)68.56()31.12()61.43()00.16( =+− ε Solving for ε gives
0012491.031.1268.56
1.061.4316−=−
−×=ε
Thus, for example, if 31.12=y is perturbed to 00125.031.12ˆ −=+= εyy (or you could use 0012491.0−=ε ), then the exact value of 10005.0ˆ =×−× zyxw ,
which is very close to 0.1 . And since 31.12
00125.031.12
=ε is small, the computation in (a)
is stable.

CHAPTER 2. 2.1 (a)
⎟⎟⎠
⎞⎜⎜⎝
⎛+
+=
−−=
=′−=
−−
−
−
−
−−
11
1
21
1
21
1
2
121or
2/1
2/1
2)(/1)(
nn
n
n
n
nnn pc
pp
cpp
cppp
xxfcxxf
(b)
( )1
21
1
2
1
1
121
1
12
1
1
21
22/1
2
12
22/1
(a) from 12
/1
/1
−
−
−
−
−
−−
−
−−
−
−
=−
=
⎟⎟⎠
⎞⎜⎜⎝
⎛+−
=
−+=
−+
=
−=
n
n
n
n
n
nn
n
nn
n
n
nn
pe
pcp
cpcc
ppc
cppcpc
cpcp
cpe
2.2 (a) 8080205)( 34 −−+=′ xxxxP , so 08016016080)2( =−+−=−′P . Thus, the zero at 2−=p has multiplicity 2≥m , which implies that Newton’s method has linear convergence (that is, the order of convergence is 1). (b) roots ( [ 1 5 0 40− 4880 −− ] ) or p = [ 1 5 0 40− 4880 −− ] ; roots ( p )

2.3 (a)
⎟⎟⎠
⎞⎜⎜⎝
⎛++
=⎟⎟⎠
⎞⎜⎜⎝
⎛+
+−+=⎟⎟
⎠
⎞⎜⎜⎝
⎛+−
−=
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛ −−=
+
−−=
′−=+
RxRx
xRx
RxRxx
RxRx
x
Rxx
xRx
x
xRx
xRx
xxfxf
xx
n
nn
n
nnn
n
nn
n
n
n
nn
nn
nn
nn
nnn
3
3
3
33
3
3
3
23
2
2
1
22
22
21
22)()(
(b)
2.10 Thm.by zero simple a is 20
2222)2(
,2root at the so ,222)(
33/2
33
322
⇒≠+=′
=+=+=′
f
xx
xxRxxf
(that is, the multiplicity of the root is 1) and thus Newton’s method converges quadratically (the order of convergence is 2=α ) 2.4 (a) The order of convergence is α if there exist constants 0>λ and 1≥α such that
λα =−
−+
∞→ pp
pp
n
n
n
1lim
(b) The order of convergence is 1 (linear convergence). (c) Yes, these approximations could have been computed with Newton’s method if the root p has multiplicity 2≥m , since in this case, the order of convergence of Newton’s method is only 1. 2.5 (a) ( )( )( )( )nn xaaxxaxaxaxP +++++= −1210)( L (b)
xbab
nnkab
kkk
nn
1
0,1,,2,1for
++←−−=
←K

2.6
322532.0)64.2)(529344.2(7529344.2)64.2)(6096.3(7
6096.3)64.2)(64.3(664.3)64.2)(1(1
1
0100
0211
0322
0433
4
−=+−=+==+−=+=
=+−=+==+=+=
=
xbabxbabxbabxbab
b
The deflated polynomial is 529344.26096.364.3 23 +++ xxx 2.7 (a) y = sin(x) – exp(-x) ; p = p1 – q1 * (p1 – p0)/(q1 – q0) ; if abs(p – p1) < tol p0 = p1 ; q0 = q1 ; p1 = p ; q1 = f(p) ; (b) Order of convergence is 1.618 since this is the order of convergence of the Secant method for a simple zero (multiplicity = 1). The multiplicity is 1 because 0)( ≠′ pf , since clearly 0 and 0)cos( >> − pep . 2.8 The linear ( 1=n ) Taylor Theorem expansion for )(xf expanded about 0p is
)(!2
)()()()()(
20
000 ξfpx
pfpxpfxf ′′−
+′−+= ,
for some value 0 and between pxξ . If we take px = (where p is a root of the equation
0)( =xf ), then from above
).( of zero a is since ,0
)(!2
)()()()()(
20
000
xfp
fpp
pfpppfpf
=
′′−+′−+= ξ
On dropping the remainder term, this gives 0)()()( 000 ≈′−+ pfpppf ,

which implies that )()(
0
00 pf
pfpp
′−≈ . This suggests computing
)()(
0
001 pf
pfpp
′−= ,
which is the first step of Newton's method, and then continue iterating with
)()(
1
11
−
−− ′−=
n
nnn pf
pfpp .
CHAPTER 3. 3.1 (a)
4.02.00
)2.04.0)(04.0()2.0)(0(
)4.02.0)(02.0()4.0)(0(
)4.00)(2.00()4.0)(2.0()( −−
−−−−
+−−
−−+
−−−−
= exxexxexxxP
or
4.02.0
08.0)2.0(
04.0)4.0()1(
08.0)4.0)(2.0()( −− −
+−−
+−−
= exxexxxxxP
(b)
error = ∏=
+
−+
n
ii
n
xxn
xf0
)1(
)()!1(
))((ξ
For 2=n ,
error = )4.0)(2.0)(0(6
))((−−−
′′′xxxxf ξ
For xexf −=)( and 1.0=x ,
error = )4.01.0)(2.01.0)(01.0(6
)1.0(
−−−− −ξe .
Since 4.0)(0 ≤≤ xξ for all values of x,
0005.0)3.0)(1.0)(1.0(6
error0
=≤e

3.2
005.0
0at attained ismax thissince 01.0021
01.0max2
)0cos(
)01.0(2
)cos(
1.01.0 with )1.0()1.0(!2
)()()(
2
1.01.0
2
=
=−=
−≤
−−
=
≤≤−+−′′
=−
≤≤−
x
x
x
xxfxfxP
ξ
ξ
ξξ
3.3 (a) X = linspace ( 1 , 4 , 31 ) ; Y = X .* log(X) z = interp1( X , Y , pi , ‘linear’ ) (b) ./1)(,1)(,)( xxfxnxfxnxxf =′′+=′= ll The error term of polynomial interpolation (n = 1) is
]1.3,3[ where, )1.3()3(!2
)()()( ∈−−′′
=− ξξ xxfxPxf .
Thus,
00041667.0)1.305.3()305.3(61
)1.3()3(max31
21
)1.3()3(121)()(
1.33
=−−≤
−−≤
−−≤−
≤≤xx
xxxPxf
x
ξ
3.4 Let .)(,)( 2
12
0 edxcxxQbxaxxQ ++=++= Then
1)1()1(1 and 1)0()0( and )0()0(
11)1()1(10at 212)0()0(
)0()0(
1
10
0
10
10
=++⇒===⇒==
=+−⇒−=−=⇒=+=+⇒′=′
=⇒=
edcfQebfQfQ
bafQdxdcxaxQQ
ebQQ

Solution: 1,1,1,1,1 −===== caebd Thus,
⎩⎨⎧
≤≤++−≤≤−++
=10,101,1
)( 2
2
xxxxxx
xQ
3.5
xdcxSxdxS
xdxcbxSxdxbxS
11100
21111
2000
62)(66)(32)(36)(
+=′′+−=′′++=′+−=′
The 8 conditions are
1 condition,fifth theFrom 14 condition,first theFrom
10660620)1(10660)1(
362)0()0()0()0(
2)0()0(311)1(
22)0(4131)1(
101
000
11111
000
1101
0101
00101
11111111
11
0000000
−=⇒=−=−−=
=⇒=+−⇒=+⇒=′′−=⇒=−−⇒=−′′
−=⇒−=⇒′′=′′=⇒′=′
=⇒=⇒=−=++⇒−=+++⇒−=
=⇒==−−⇒=−−−⇒=−
bbbdab
dddcSddS
ccSSbbSS
aaaSSdcbdcbaS
aSdbadbaS

SECTIONS 4.1-4.2 4.1
).()(32)(2
)()(34)(2)(2)(
)()(3
2)(2)(4)(4
)(3)2()(4)(3
Thus
)()(6
8)(2
4)(2)()2(
)()(6
)(2
)()()(
40
30
40
30
200
40
3
02
00
0
000
40
3
0
2
000
40
3
0
2
000
hOxfhxfh
hOxfhxfhxfhxf
hOxfhxfhxfhxf
xfhxfhxfxf
hOxfhxfhxfhxfhxf
hOxfhxfhxfhxfhxf
+′′′−′=
+′′′−′′−′−−
+′′′+′′+′++
−=+−++−
+′′′+′′+′+=+
+′′′+′′+′+=+
)()(
32)2()(4)(3
)(
Therefore,
30
2000
0 hOxfhh
hxfhxfxfxf +′′′+
+−++−=′
4.2 If h = 0.04, then h/2 = 0.02 and the given approximations (with their truncation errors) are L++++= 6
64
42
2)04.0( hKhKhKNe and L++++= 6
64
42
2 )2/()2/()2/()02.0( hKhKhKNe Multiplying the second equation by 4, and subtracting gives
)(3
)04.0()02.0()02.0(
or )(3
)04.0()02.0(4)()04.0()02.0(43
4
4
4
hONNNe
hONNe
hONNe
+−
+=
+−
=
+−=
Thus, the )( 4hO approximation to e is
...718281333.23
718644.2718372.2718372.2 =−
+

4.3 The three answers are 2.7180745 2.7182789 2.7182815 The justification is as follows. Entries in column 2: (a) L+++= 4
22
11 )( hKhKhNM
(b) L+⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+=
4
2
2
11 33)3/( hKhKhNM
Calculate 9 * (b) – (a): )()()3/(98 4
11 hOhNhNM +−= which implies that
8
)()3/(9 11 hNhNM −= or
8)()3/()3/( 11
1hNhNhNM −
+= .
Thus, the two required values in the second column of the table are computed as follows:
7180745.28
766013.2723401.2723401.2 =−
+
7182789.28
723401.2718848.2718848.2 =−
+
For the entry in the third column: (c) L+′+′+= 6
24
12 )( hKhKhNM
(d) L+⎟⎠⎞
⎜⎝⎛′+⎟
⎠⎞
⎜⎝⎛′+=
6
2
4
12 33)3/( hKhKhNM
Calculate 81*(d)-(c): )()()3/(8180 6
22 hOhNhNM +−= which implies that
80
)()3/(81 22 hNhNM −= or
80)()3/()3/( 22
2hNhNhNM −
+=
Thus, the required value in the third column is
7182815.280
7180745.27182789.27182789.2 =−
+
4.4 (a)
)3(6
)(2
3)0(3
34
)3()3)(03(
))(0()()3)(0()3)(0()0(
)30)(0()3)(()(
2
2
2
2
2
22
hfh
hxxhfh
hxxfh
hhxx
hfhhh
hxxhfhhhhxxf
hhhxhxxP
−+
−−
+−=
−−−−
+−−−−
+−−−−
=

Thus,
)3(6
2)(2
32)0(3
42)( 222 hfh
hxhfh
hxfh
hxxP −+
−−
−=′
(b) At 0=x ,
)3(61)(
23)0(
34)0( hf
hhf
hf
hP −+
−=′ .
With 05.0=h and the given data,
4.05.03.32.3)15.0()05.0(6
1)11.0()05.0(2
3)12.0()05.0(3
4)0()0( −=−+−=−+−
=′≈′ Pf
SECTIONS 4.3-4.6 4.5
( )
( )
( )
( )2 isprecision of degree thus
481
245273
43
481)(
9934
39)(
2933
43
29)(
3134
331)(
4433
3
0
433
3223
0
322
223
0
3
0
hhhhhhdxxxxf
hhhhhdxxxxf
hhhhhdxxxxf
hhhdxxf
h
h
h
h
≠=+==
=+==
=+==
=+==
∫
∫
∫
∫
4.6
( )
( )
058108.2
form in thisanswer your leave )031670.1(11000276.1000276.1)031670.1(11121
)6.0(11)2.0()2.0()6.0(1152
245
6.0,2.0,2.0,6.0,5/2 3210
=
←+++=
++−+−≈
==−=−==
ffffI
xxxxh

4.7
( ) ( )
( ) ( )[ ]
[ ]
( )2
with 43
46
226
32
24
4
3or
34
210
210
20210
20210
112121
112122
abhfffh
fffab
fffffab
ffabfffab
RRRRRR
−=++=
++−
=
+−++−
=
+−
−⎥⎦⎤
⎢⎣⎡ ++
−
=
−+
−=
4.8 If ./24)(then ,/1)( 5)4( xxfxxf == Thus
.768)5.0(
24)(max 5)4(
5.15.0==
<<μ
μf
So
).768(2880
1)()2(
1180
1)(180
error 4)4(
4)4(4
mf
mfhab
≤=−
−= μμ
Therefore, 810error −≤ implies that 84 10
2880768 −≤
m, which gives
.86.712880
10768or 66.266666662880
107684/188
4 =⎟⎟⎠
⎞⎜⎜⎝
⎛ ×≥=
×≥ mm L
NOTE: leave your answer in this ⇑ form 4.9
function y = f(x) y = 13*x.*(1-x).*exp(-1.5*x) quad ( ' f ' , 0 , 4, 1e-4 ) OR quad ( @f , 0 , 4 , 1e-4 ) NOTE: 1e-4 can also be written as 0.0001

4.10 (a)
⎟⎟⎠
⎞⎜⎜⎝
⎛+++≈ ∑ ∑∫
−
= =−
1
1 121220 42
3)(
m
j
m
jmjj
b
a
ffffhdxxf
That is, 12,2,,1,4,2,3 321 −===−==== jtjrmqmpccc (b) function approx = comptrap (a , b, m) h = ( b - a ) / ( 2 * m ) ; sum1 = 0 ; for j = 1 : m-1 sum1 = sum1 + f ( a + 2 * j * h ) ; end sum2 = 0 ; for j = 1 : m sum2 = sum2 + f ( a + (2*j-1) * h ) ; end approx = ( h / 3 ) * ( f(a) + 2*sum1 + 4*sum2 + f(b) ) ;
4.11 [ ] [ ] 3598.0153.0)328.0(4161)1()5.0(4)0(
31 =−+=++= fffhS
[ ]
[ ] 3639.0153.0)033.0(4)328.0(2)683.0(41121
)1()75.0(4)5.0(2)25.0(4)0(32
=−+++=
++++= fffffhS
Error estimate is 00027.0)0041.0(151
151
12 ==− SS
SECTIONS 5.1-5.5 5.1 (a)
( )
( ) ( ) ( )( ) )1(21121121))(,( so
1))(,(
2
22
22
2
2
+=−++=+⎟⎠⎞
⎜⎝⎛ −+′+′=′
+=
ytyyyy
tyy
tyyy
ttytf
yyt
tytf
The iterative formula for the Taylor method of order 2 is

( ) ( )
( ) ( )11
12
2
),(2
),(
2
22
2
222
2
1
++++=
++++=
′++=+
ii
ii
i
ii
ii
iii
ii
iiiiii
wtwh
wt
hww
wtwhww
thw
wtfhwthfww
So
( ) ( )
84.1
)12()1(
)4)(01.0()12()1(
)2)(1.0(2
11
2
020
20
2
00
001
−=
+−++−−
+−=
++++= wtwh
wt
hwww
(b)
[ ]
[ ]
( )
allowed.not are scalculator ifanswer your for OK is ** Line
8345.1)309090.12)(05.0(2
8.1)8.1(1.1
12)05.0(2
))2)(1.0(2,1.1()24(11)05.0(2
**))2,1()1.0(2,1.1()2,1(21.02
)),(,(),(2
2
00010001
−=++−=
⎥⎦⎤
⎢⎣⎡ −−++−=
⎥⎦⎤
⎢⎣⎡ +−+−+−=
−+−+−+−=
+++=
f
fff
wthfwtfwtfhww
(c) )( 3hO 5.2 (a) 000367.0078829.1078462.1)04.2( 4 =−=− wy

(b) Use the exact value 059126.1)03.2( =y to define
( )
allowed.not are scalculator ifanswer your for OK is ** Line
078552.1)942596.1)(01.0(059126.1**)059126.103.2(1)01.0(059126.1)059126.1,03.2()03.2( 2
=+=−++=+= fhyv
Then
allowed.not are scalculator ifanswer your for OK is ** Line
000090.0078552.1078462.1
**078462.1)04.2( t.e.local
=−=
−=−= vvy
(c) function z = f( t , y) z = 1 + (t – y)^2 [ t , y ] = ode45 ( @f , [ 2 , 4 ] , 1 ) NOTE. z = 1 + (t – y ).^2 is OK, but the .^ is not required. @f can also be ‘ f ‘ . [ 2 , 4 ] can also be [ 2 4 ] . 5.3 (a) 00000180.007845974.107846154.1)04.2( 4 =−=− wy (b) Use the exact value 05912621.1)03.2( =y to define
( )
( )( )
allowed.not are scalculator ifanswer your for OK is ** Line
07846110.107855217.1,04.2(94259592.1005.005912621.1
))05912621.1,03.2(01.005912621.1,04.2()05912621.1,03.2(005.005912621.1
**)))03.2(,03.2()03.2(,04.2())03.2(,03.2(2
)03.2(
=++=
+++=
+++=
ffff
yfhyfyfhyv

Then
allowed.not are scalculator ifanswer your for OK is ** Line
00000044.007846110.107846154.1
**07846154.1)04.2( t.e.local
=−=
−=−= vvy
5.4 (a)
[ ]
tttyttyt
ttytytty 1)(/)(1)()()( 22 =
−+=
−′=′′
The iterative formula is
⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡++=+
ii
iii t
htw
hww 12
12
1
(b) function taylor t = 1 ; w = 2 ; h = 0.01 ; for i = 1 : 100 w = w + h * (1 + w / t ) + h ^ 2 / (2 * t ) t = t + h ; end SECTIONS 6.1-6.4 6.1
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−
−
310
111
2
1
0
22
1
1
ccc
eeee
ee
6.2 -- to avoid possible division by 0 (that is, a pivot that is exactly equal to 0) -- to avoid using pivots that are very small in magnitude, since they may cause the computation to be unstable
6.3
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−−
−=−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−−−=
3600015.001012
3220015.001012
4)5.0/(2
32205.01011012
2/1
32
21
m
m
Back-substitution:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
=⇒=⇒−=−=⇒−=−⇒=+−
==
5.010
is,That
0021215.05.005.0
5.06/3
1121
2232
3
x
xxxxxxxx
x
6.4 The augmented matrix is
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−
042231214220
Interchange rows 1 and 3
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−
422031210422
Eliminate
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−
422033100422

Interchange rows 2 and 3
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−
331042200422
Eliminate
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−
120042200422
Back-substitution
2/12
420
2/3224
2/1
321
32
3
−=−−−
=
−=−−
=
=
xxx
xx
x
6.5 A \ [ 0 1 0 0 ]’ or A \ [ 0 ; 1 ; 0 ; 0 ] or the two statements b = [ 0 1 0 0 ]’; A \ b 6.6 % Use back-substitution to solve Ax = y for x. function x = solve(n, A, y) x(n) = y(n) / A(n, n); for i = n-1 : -1 : 1 sum = 0; for j = i+1 : n sum = sum + A(i, j) * x(j); end x(i) = (y(i) – sum)/A(i, i); end
Related Documents











