Computational Fluid Dynamics-Based System Identification of Marine Vehicles

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 1/19
Computational Fluid
Dynamics-Based SystemIdentification of MarineVehicles

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 2/19
Contents 1) Motivation2) Goal3) Conventional Practical Experiment-Based
System Identification Procedures4) The Proposed CFD-Based System
Identification Procedure5) Case Studies6) Discussion7) Conclusion

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 3/19
1) Motivation 1) What is System Identification of Marine
Vehicles?
2) Importance of System Identification ofMarine Vehicles
3) Importance of Computational Fluid
Dynamics Based System Identification

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 4/19
1) Motivation 1) What is System Identification of
Marine Vehicles?
′
+ = −

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 5/19
1) Motivation 2) Importance of System Identificationof Marine Vehicles
Considering the following motivating applications,Solving a dynamic model of this simple formavailable, should be of a great importance

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 6/19
1) Motivation i) Deciding the suitable thrusters choices

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 7/19
1) Motivation ii) Predicting the marine vehicle motion
in the fastest way possible

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 8/19
1) Motivation ii) Deriving a suitable control law thatcan force the vehicle to follow acertain desired trajectory

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 9/19
1) Motivation 3) Importance of Computational FluidDynamics Based System Identification

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 10/19
2) Goal Overcoming the mentioned disadvantages ofthe conventional practical approaches by:
1) Proposing an alternative procedure for the SystemIdentification based on CFD simulation rather thanpractical experiments
2) Providing a quite intuitive set-up for the CFD
simulation to help the user quickly set up a reliablesimulation

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 11/19
Conventional Practical Experiment-
Based System Identification
Procedures
Current Methods :-
• Steady State Experiments
– Constant Thrust (Zero Acceleration): DampingCoefficient s (linear and non-linear) terms.
•
Dynamic Experiments – Sinusoidal Force
= sin +
Mass and added mass term.

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 12/19
The Proposed CFD-Based System
Identification Procedure
= ( ) ∗ +̈ ∗
F is the sum of external force (or moment) from thrusters, gravityforce and pressure force due to fluid.
̈ is the acceleraon of DOF x
̇is the velocity of DOF x.
spring: hydrostatic spring term.
x is the translation / rotation DOF.

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 13/19
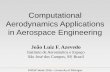
Choose a suitable thrust (or input moment for rotational DOF) that is expected to
yield a reasonable steady state velocity in a certain DOF
Discretize the problem geometry using a suitable meshing algorithm.
Solve the system of partial differential equations describing the fluid dynamics usingfinite volume method defined over the discretized geometry (mesh) subject to
suitable boundary conditions to compute the pressure force acting on the marine
vehicle due to fluid
Solve the ordinary differential equation (ODE) in the current degree of freedom
= ( ) ∗ +̈ ∗
Steady
state
velocity
reached?
Use a mesh moving algorithm to adjust
the mesh so that the vehicle appears at
its new position obtained from the
solution of the ODE
Take the velocity and acceleration readings obtained from simulation results at the
different time instants as the measurements corresponding to the input thrust. Use
LSQ method to find the model parameters in the DOF under consideration that best
fit these measurements.
Repeat the whole procedure for other degrees of freedom of interest
T h e c o m p l e t e f l o w
c h a r t o f t h e p
r o p o s e d
C F D- b a s e d m o d
e l i d e n t i f i c a t i o n
p r o c e d u r e
Yes
No

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 14/19
Case Studies
A. System Identification of an Underwater Vehicle
Simplifying Assumptions:-
• The vehicle travels at low speeds, that is, less than 2m/s.• Roll and pitch movements are passively controlled and
therefore, considered to be negligible.
• The vehicle is considered to be symmetrical about its
three planes.
• During all maneuvers the vehicle is always maintainedin a horizontal posture.
• Disturbances from the water environment on the vehicle
such as currents and waves are negligible.

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 15/19
The system identification problem is reduced to the
problem of identifying the added mass and damping
parameters in four decoupled equations of theform:
̇+ (+ ||) = +

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 16/19
Discussion
A. Accuracy of CFD Simulation
1- under-relaxation factor
Solnew = α Solnew + (1- α) Solold where α if the under-relaxation factor
2- Mesh Quality

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 17/19
B. Comparison of CFD simulation and Practical
Experiments
1- Readings of accelerations and other
measurements
2- Steady state solver

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 18/19
C. Importance Analysis

7/27/2019 Computational Fluid Dynamics-Based System Identification of Marine Vehicles
http://slidepdf.com/reader/full/computational-fluid-dynamics-based-system-identification-of-marine-vehicles 19/19
Conclusion
• Future Work
- Perform Practical identification experiments and
compare their results with the CFD based results.
- Study the reasons behind the discrepancies and
based on this study conclude a set of
recommendations based on which the accuracy of
both simulations and practical setups can beimproved.
Related Documents