Journal Title Volume XX Issue XX, Month Year Journal Website 1 Computational Engineering Analysis of the Hydraulic‐Fracturing Process M. Grujicic *1 , R. Yavari, S. Ramaswami, J. S. Snipes, R. Galgalikar Department of Mechanical Engineering Clemson University, Clemson SC 29634, USA *1 [email protected] Received 14 May 2014; Accepted 25 February 2014; Published May 2014 © 2014 Science and Engineering Publishing Company Abstract Hydraulic fracturing (including horizontal drilling) is a technology widely employed to significantly increase the rate and extent of oil and natural gas production from deep (ca. 2 km) shale reservoirs. Past advancements in this technology have been mainly made using experimental, empirical and trial‐and‐error approaches. Since the use of modern computational techniques has benefited many industries (such as transportation, defense, biomedical, pharmaceutical, etc.), it is hoped that the use of these techniques can yield similar benefits in oil and natural gas extraction from deep‐seated reservoirs. The present work provides a full three‐dimensional finite‐element analysis of the main stages of hydraulic‐fracturing‐stimulated fuel extraction from such reservoirs. Challenges associated with such an analysis due to nonlinear character and coupling between the mechanical response of saturated porous rock formations, their fracturing behavior and the fluid flow through the fracture and the flow‐induced fracturing were all addressed. In contrast to the prior finite‐element analyses, the present work addresses the issues related to the intersection of naturally‐occurring fissures within the fuel‐ bearing rock formations and the profile of sand‐injection into the hydraulic‐fracturing fluid. The results obtained are used to judge the potential of hydraulic‐fracturing process optimization in maximizing the fuel‐extraction yield. Keywords Hydraulic Fracturing; Analysis of Porous Media; Finite Element Modeling Introduction The subject of the present work is computational modeling and simulations of the hydraulic fracturing (also known as “fracking”) process used for extraction of oil and/or natural gas from deep shale formations. Since this process has been mainly developed and advanced using purely empirical trial‐and‐error approaches, it is hoped that the use of an engineering analysis and the employment of multi‐physics computational methods and tools can make this process more economical, speed up its further development and, possibly, help address some of the concerns raised regarding the potential impact of this process on the environment. Based on the foregoing, the concepts most pertinent to the present work are: (a) the basics of hydraulic fracturing; and (b) prior work involving the use of advanced computational techniques in the analysis of the hydraulic fracturing process. These two aspects are reviewed briefly in the remainder of this section. The Basics of Hydraulic Fracturing Deep shale formations, which were created tens of millions of years ago, contain substantial deposits of trapped oil and natural gas. In recent years, new deep‐ shale‐formation fracture‐stimulation technologies (such as hydraulic fracturing, including horizontal drilling) have enabled the extraction of these oil and natural gas deposits in a time‐efficient and cost‐ effective manner. Since the shale reservoirs in question are located ca. 2 km below the surface, while natural water reservoirs are located at depths smaller than approximately 400 m, oil/natural gas extraction is claimed by the oil and gas industry to be safe to the environment. To further ensure that the impact on the fresh‐water aquifer is minimal, the holes drilled into the ground (used to reach the deep shale reservoirs) are lined with steel pipes (fixed in place using cement), so forming a barrier (commonly referred to as casing) between the bore and the surrounding earth. Despite these efforts by the oil and gas industry, the true impact (particularly its long‐term component) of hydraulic‐ fracturing/horizontal‐drilling on the environment remains a subject of debate.

Computational Engineering Analysis of the Hydraulic-Fracturing Process
Apr 02, 2016
http://www.seipub.org/aee/paperInfo.aspx?ID=6941 Hydraulic fracturing (including horizontal drilling) is a technology widely employed to significantly increase the rate and extent of oil and natural gas production from deep (ca. 2 km) shale reservoirs. Past advancements in this technology have been mainly made using experimental, empirical and trial-and-error approaches. Since the use of modern computational techniques has benefited many industries (such as transportation, defense, biomedical, pharmaceutical, etc.), it is hoped that the use of these techniques can yield similar benefits in oil and natural gas extraction from deep-seated reservoirs. The present work provides a full three-dimensional finite-element analysis of the main stages of hydraulic-fracturing-stimulated fuel extraction from such reservoirs. Challenges associated with such an analysis due to nonlinear character and coupling between the mechanical response of saturated porous rock formations, their fracturing
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Journal Title Volume XX Issue XX, Month Year Journal Website
1
Computational Engineering Analysis of the
Hydraulic‐Fracturing Process M. Grujicic *1, R. Yavari, S. Ramaswami, J. S. Snipes, R. Galgalikar
Department of Mechanical Engineering
Clemson University, Clemson SC 29634, USA
Received 14 May 2014; Accepted 25 February 2014; Published May 2014
© 2014 Science and Engineering Publishing Company Abstract
Hydraulic fracturing (including horizontal drilling) is a
technology widely employed to significantly increase the
rate and extent of oil and natural gas production from deep
(ca. 2 km) shale reservoirs. Past advancements in this
technology have been mainly made using experimental,
empirical and trial‐and‐error approaches. Since the use of
modern computational techniques has benefited many
industries (such as transportation, defense, biomedical,
pharmaceutical, etc.), it is hoped that the use of these
techniques can yield similar benefits in oil and natural gas
extraction from deep‐seated reservoirs. The present work
provides a full three‐dimensional finite‐element analysis of
the main stages of hydraulic‐fracturing‐stimulated fuel
extraction from such reservoirs. Challenges associated with
such an analysis due to nonlinear character and coupling
between the mechanical response of saturated porous rock
formations, their fracturing behavior and the fluid flow
through the fracture and the flow‐induced fracturing were
all addressed. In contrast to the prior finite‐element analyses,
the present work addresses the issues related to the
intersection of naturally‐occurring fissures within the fuel‐
bearing rock formations and the profile of sand‐injection into
the hydraulic‐fracturing fluid. The results obtained are used
to judge the potential of hydraulic‐fracturing process
optimization in maximizing the fuel‐extraction yield.
Keywords
Hydraulic Fracturing; Analysis of Porous Media; Finite Element
Modeling
Introduction
The subject of the present work is computational
modeling and simulations of the hydraulic fracturing
(also known as “fracking”) process used for extraction
of oil and/or natural gas from deep shale formations.
Since this process has been mainly developed and
advanced using purely empirical trial‐and‐error
approaches, it is hoped that the use of an engineering
analysis and the employment of multi‐physics
computational methods and tools can make this
process more economical, speed up its further
development and, possibly, help address some of the
concerns raised regarding the potential impact of this
process on the environment. Based on the foregoing,
the concepts most pertinent to the present work are: (a)
the basics of hydraulic fracturing; and (b) prior work
involving the use of advanced computational
techniques in the analysis of the hydraulic fracturing
process. These two aspects are reviewed briefly in the
remainder of this section.
The Basics of Hydraulic Fracturing
Deep shale formations, which were created tens of
millions of years ago, contain substantial deposits of
trapped oil and natural gas. In recent years, new deep‐
shale‐formation fracture‐stimulation technologies
(such as hydraulic fracturing, including horizontal
drilling) have enabled the extraction of these oil and
natural gas deposits in a time‐efficient and cost‐
effective manner.
Since the shale reservoirs in question are located ca. 2
km below the surface, while natural water reservoirs
are located at depths smaller than approximately 400
m, oil/natural gas extraction is claimed by the oil and
gas industry to be safe to the environment. To further
ensure that the impact on the fresh‐water aquifer is
minimal, the holes drilled into the ground (used to
reach the deep shale reservoirs) are lined with steel
pipes (fixed in place using cement), so forming a
barrier (commonly referred to as casing) between the
bore and the surrounding earth. Despite these efforts
by the oil and gas industry, the true impact
(particularly its long‐term component) of hydraulic‐
fracturing/horizontal‐drilling on the environment
remains a subject of debate.

Journal Website Journal Title Volume * Issue *, Month Year
2
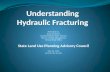
In order to facilitate the discussion, presented below,
of the basic steps associated with hydraulic‐fracturing,
a simple schematic of this process is depicted in Figure
1. Typically, the hydraulic‐fracturing process involves
the following basic steps: (a) the initial step – within
this step, a vertical hole is drilled while ensuring the
stability of the wellbore and integrity of the drill bit
(via the use of a drill pipe). The drill pipe is a thick‐
walled, flexible, kilometer‐long steel pipe which is
attached to the more‐rigid drill stem and, in turn, to
the drill bit to form the so‐called “drill string.” To
prevent drill‐bit from overheating and help with the
rock‐cutting extraction, drilling is carried out in the
presence of circulating water; (b) the casing‐construction
step – when the wellbore is significantly deeper than
any local aquifer, drilling is temporarily ceased, the
drill pipe removed and the wellbore lined with steel
pipes. Next, wet cement is pumped down the pipe
under sufficiently high pressure to ensure that, once
the cement has reached the bottom of the hole, it can
flow upward and fill the gap between the casing and
bore‐hole wall. Upon hardening of the cement, a low‐
permeability barrier (called surface casing) is created
between the bore‐hole and the deep shale
surroundings. To further minimize the exchange of
fluids between the bore and the surrounding aquifers,
additional casing layers may be employed; (c) the
horizontal‐drilling step – the vertical drilling and casing
construction continue until the desired depth (also
known as the “kick‐off point”) is reached. Beyond this
point, the direction of drilling begins to acquire a
horizontal component, and ultimately becomes
horizontal. One of the perceived advantages of
horizontal drilling is that one vertical hole can be used
to generate multiple horizontal‐bore sections,
minimizing the potential negative effect of drilling to
the surface environment. When the desired length of
the horizontal section(s) of the bore is reached, the
drilling gear is removed and the horizontal casing is
placed and secured; (d) the casing‐perforation step –
since, at this point, the rock formation containing
trapped oil/gas is isolated (in a fluid‐exchange sense)
from the bore due to the presence of the impermeable
cement/steel casing, preventing seepage of the oil/gas
into the wellbore, a local connection between the
reservoir and bore must be established. This is done
by lowering and guiding a specialized shape‐charge
gun to the desired location within the wellbore. The
gun is next fired to create perforations in the casing
and cracks/holes in the adjacent rock formation; (e)
hydraulic‐fracturing step – upon the removal of the
perforating gun from the wellbore, a mixture of water,
FIGURE 1. A SCHEMATIC OF THE HYDRAULIC FRACTURING/FRACKING PROCESS INVOLVING HORIZONTAL DRILLING.
PLEASE SEE TEXT FOR DETAILS.

Journal Title Volume XX Issue XX, Month Year Journal Website
3
chemicals and sand are pumped, under high pressure,
into the wellbore and, via the aforementioned
perforations, into the deep underground reservoir
formations. The chemicals used (typical concentrations
of which are in the range of 0.1 to 0.5 vol. %) have a
number of roles, such as: (i) reducing friction
accompanying flow of the hydraulic‐fracturing fluid;
(ii) inhibiting bacteria formation; and (iii) minimizing
the tendency for sand‐particle coalescence. The
application of high pressure causes hydraulic‐
fracturing/fracking of the deep underground reservoir,
while the presence of sand (also referred to as
“proppant”) within the hydraulic‐fracturing fluid
ensures that the cracks remain open upon removal of
the applied pressure. These processes stimulate a
higher rate of extraction of oil and gas from the deep
underground reservoirs; (f) stimulation‐segment
isolation step – next, specially designed plugs are used
to isolate the newly‐created stimulation segments, and
the casing‐perforation and hydraulic‐fracturing steps
repeated to generate additional stimulated segments.
This process is repeated multiple times along the
horizontal section of the well, the section which may
extend several kilometers; (g) production step – once all
the desired stimulation segments are created, the
isolation plugs are drilled out, the pressure is relieved,
and the extraction of the previously trapped fuel
begins. In the initial portion of this step, the extraction
consists mainly of the hydraulic‐fracturing fluid. This
fluid is separated from the fuel and either: (i) recycled
for use in subsequent hydraulic‐fracturing operations;
or (ii) safely disposed of in accordance with
government regulations. Subsequent extractions
consist mainly of the released fuel which first flows
through the horizontal section and then up the vertical
section of the wellbore.
Prior Hydraulic‐Fracturing Computational Work
Modeling of hydraulic fracturing is a fairly
complicated task, since it must account for coupling
between four basic processes: (a) deformation of the
rock formation induced by the injected‐fluid pressure
acting on the fracture/crack faces; (b) viscous‐fluid
flows within the fracture; (c) propagation/extension of
the fracture into the rock formation, induced by the
sustained application of the hydraulic‐pressure/fluid‐
flow; and (d) hydraulic‐fracturing fluid “leakoff” from
the fracture into the adjacent rock‐formation. The
challenges associated with hydraulic‐fracturing
process modeling are further compounded by the
nonlinear characters of the differential/algebraic
equations governing these four processes. These
equations include: (a) a mechanical constitutive
(algebraic‐type) relation linking the pressure within
the fracture to the fracture‐opening and, in turn, to the
deformation of the surrounding rock formation; (b) a
nonlinear fluid‐flow differential equation relating the
rates of flow and fluid accumulation to the fracture
opening and the gradient of the fluid pressure; (c) a
fracture‐propagation law (e.g. a linear‐elastic fracture
mechanics, LEFM, relation which links the fracture‐
length increase to the relative magnitude of the fluid‐
induced stress intensity factor and its critical rock‐
formation toughness‐quantifying counterpart); and (d)
a diffusion‐type differential or algebraic relation
governing fluid leakoff through the fracture faces.
The analytical‐modeling efforts reported in the open
literature [e.g. Jeffrey et al. (2001)] have focused on
simplified (and predetermined) fracture geometries
(e.g. penny‐shaped cracks) and utilized simplified
distributions (e.g. uniform distribution) of the pressure
over the fracture faces. These simplifications could be
considered as being of a major character when
analyzing the full‐scale hydraulic fracturing process
and, consequently, analytical solutions have
demonstrated relatively little utility in these contexts.
This is the reason that the majority of the most recent
non‐experimental efforts have focused on the use of
advanced numerical methods and tools in order to
analyze the hydraulic‐fracturing process.
In the late 1970s, the so‐called “pseudo‐3D” model,
perhaps the first reported hydraulic‐fracturing
numerical model, was developed by Clifton (1989). In
order to address the phenomena such as: (a) complex
three‐dimensional geometry of the hydraulic
fracturing; and (b) complex interactions between the
four coupled phenomena/processes discussed above,
additional models have been proposed by Adachi et al.
(2007), and Zhang et al. (2007). Subsequent efforts used
innovative computational methods and tools, such as
the extended finite element methods (XFEM)
[Lecampion (2009)], capable of handling singularities
such as those associated with the crack tip, within the
LEFM formalism, and the discrete‐element methods
(methods which treat porous material not as a
continuum but rather as an assembly of interacting
and/or bonded particles) [Zhao et al. (2008), Grujicic et
al. (2013ab)]. The most recent numerical‐modeling
efforts have focused on issues such as: (a) potential
contamination of shallow aquifers [Gassiat et al.
(2013)]; (b) optimization of the hydraulic‐fracturing
process [Zhu et al. (2013)]; and (c) identification of the
factors affecting well productivity [Lv et al. (2013)].

Journal Website Journal Title Volume * Issue *, Month Year
4
Despite all these recent advances in the numerical
analysis of the hydraulic‐fracturing process, this
engineering and scientific field needs additional
maturing before its predictions can become a bona fide
complement or substitute to the experimental field‐test
data. The work presented in the current manuscript is
an attempt to further advance the numerical approach
to the computational investigation of the hydraulic‐
fracturing process, and is a continuation of our
previous study [Grujicic et al. (2013c)].
Main Objective
The main objective of the present work is to utilize
cohesive‐zone finite elements in order to numerically
investigate the hydraulic‐fracturing process resulting
in the formation of vertical fractures. The cohesive‐
zone finite‐element approach is an alternative to the
finite‐element approach based on the use of the LEFM.
As pointed out earlier, the use of the LEFM and the
zero‐opening crack‐tips led to stress singularities at
the crack tip. Such singularities posed a severe
numerical challenge to the finite element method,
which could be resolved only through the use of crack‐
tip‐tracking adaptive‐meshing schemes and through
the use of special hybrid elements [e.g. Grujicic and
Cao (2002)]. These remedial schemes are
computationally quite costly, rendering a full three‐
dimensional analysis of the hydraulic‐fracturing
process impractical or impossible. In addition to stress
singularities, zero‐opening crack tips gave rise to
singularities in the degenerate partial differential
equation governing viscous flow of the hydraulic‐
fracturing fluid through the fracture [Peirce and
Detournay (2008)]. Remedy of this problem was
associated with yet further increases in the
computational cost.
In sharp contrast to the LEFM, the cohesive‐zone
finite‐element approach treats rock‐formation
fractures as having finite opening even in the un‐
cracked state. Consequently, stress singularities and
the associated singularities in the degenerate partial
differential equation are avoided. This leads to a
considerably reduced computational cost. Additional
savings in the computational cost through the use of
cohesive‐zone elements results in close tracking of the
crack‐tip position not being required (the position of
the crack tip is a normal outcome of the finite element
method). In sharp contrast, in the case of LEFM finite‐
element analysis, fracture evolution entails
(computationally expensive) tracking of the current
location of the crack‐tip. In addition, the cohesive
zone‐based finite element approach offers additional
capabilities of interest for modeling the hydraulic‐
fracturing process, such as: (a) initiation of new cracks
within the rock formation, as well as coalescence of the
existing cracks and fragment formation; and (b)
initiation of the fracture within the borehole casing.
The advantages of the cohesive‐zone finite element
approach identified above enable this method to be
employed in the analysis of a large‐scale hydraulic‐
fracturing process.
The finite element method which utilizes the cohesive‐
zone approach has already been applied with success
to the analysis of fracture in a variety of
materials/systems including metals, ceramics,
polymers, and hybrids [Grujicic et al. (2009b, 2012)].
This approach was recently used by Zhang et al. (2012)
and Zhang et al. (2010) to investigate the hydraulic‐
fracturing process. The present work advances the
approach and the analysis reported by Zhang et al.
(2012) and Zhang et al. (2010) in the direction of (i)
revealing the role natural fissures intersected by
hydraulic fractures play in the degree of fuel‐reservoir
stimulation; and (ii) clarifying the effect of sand
concentration and its injection profile (i.e. variation of
the sand concentration with time) into the hydraulic‐
fracturing fluid on the success of the hydraulic‐
fracturing process.
Porous-Medium/Fluid-Flow/Fracture Coupled Analysis
Modeling and simulation of hydraulic fracturing is a
complex endeavor and involves mathematical and
numerical treatment of two interacting/coupled
phenomena/processes, each of which is itself fairly
complex [Dassault Systèmes (2011)]. The two
processes involved include: (a) flow of the hydraulic‐
fracturing fluid through the wellbore, perforations and
fractures, and the accompanying additional fracturing;
and (b) fluid flow within the surrounding porous rock
formation and its accompanying deformation. The two
phenomena are coupled through: (a) the fluid leakoff
through the wellbore/fracture surfaces; and (b) the
fluid pressure acting as traction on the fracture
surfaces. Due to space limitations, only a qualitative
synopsis of the main concepts and functional relations
associated with the modeling and simulation of
hydraulic fracturing is provided in this section.
Continuum Analysis of Porous Media
Pore fluid diffusion/stress‐coupling types of problems
involve single‐phase, partially‐ or fully‐saturated fluid

Journal Title Volume XX Issue XX, Month Year Journal Website
5
flow through porous media. Such problems can be
analyzed under a variety of conditions, such as: (a)
including/excluding the pore fluid weight; (b)
including/excluding heat transfer due to conduction in
the soil skeleton and the pore fluid, and convection
due to the flow of the pore fluid; (c) time‐
dependent/transient or time‐invariant/steady‐state
scenarios; (d) including/neglecting nonlinear
geometrical and/or material effects; and (e) including
potential contacts between the model components.
1) Porous Medium Effective‐Stress Principle
It is a common practice to assume that the porous
medium consists of a solid skeleton and
(connected/isolated) pores filled with up to two
distinct fluids: (a) a nearly‐incompressible “wetting
liquid”; and (b) a compressible gas. A dry medium
contains only the gas; a partially‐saturated medium
contains both fluids; and a fully‐saturated medium
contains only the wetting liquid. The wetting liquid
can be present either as a free‐flowing or a trapped
liquid (in the case of isolated pores and/or presence
of a material which absorbs the liquid and forms a
gel). It should be noted that the present work is
concerned with a saturated porous medium which
does not contain trapped fluid, the conditions
which are commonly encountered in the hydraulic‐
fracturing process.
When analyzing the total (true Cauchy) stress at a
material point within the porous medium, σ , this
quantity is commonly assumed to be composed of
three parts: (a) the so called “effective stress,” σ ,
associated with the solid skeleton; (b) the pressure
associated with the wetting liquid, wp ; and (c) the
pressure associated with the gas/air, ap .
In the analysis of porous media, two parameters
are often encountered/used in order to quantify the
fraction of the porous‐medium volume occupied
by the fluid: (a) porosity, n – the ratio of the volume
of voids to the total volume; and (b) void ratio, e –
the ratio of the volume of voids to the sum of the
volumes occupied by the solid skeleton and the
trapped fluid. The two quantities are related by the
equation nne 1 .
It should be noted that porosity, n, or void ratio, e,
(and, in the case of a partially saturated porous
medium, saturation, s) are state variables of the
porous medium which define morphological (and
saturation) state of the porous medium and evolve
with deformation/loading of this medium.
Consequently, the appropriate evolution equations
for these quantities must be defined.
2) Equilibrium Equation for a Porous Medium
The first porous‐medium governing equation
involves an equilibrium equation which, within the
current configuration, is generally expressed using
the principle of virtual work.
3) Constitutive Response of Porous‐Medium
Components
The porous medium is generally considered as a
mixture of the solid‐skeleton phase, entrapped
fluid (assumed to be integrated within the solid
matter), and voids (filled with wetting and non‐
wetting fluids). Thus, to completely define the
constitutive behavior of a porous medium, one
must specify: (a) volumetric responses of the
wetting, non‐wetting and trapped fluids. As
mentioned earlier, the contribution of the non‐
wetting fluid and that of the trapped fluid
(typically lumped with the solid material response)
are ignored in the present work; (b) volumetric
response of the solid skeleton; and (c) deviatoric
response of the solid skeleton.
Volumetric Constitutive Response of the Wetting Liquid:
Under isothermal conditions at the reference
temperature, at which the contribution of the
thermal strains can be neglected, the volumetric
constitutive response of the wetting fluid is
typically expressed by a pressure vs. density
relation.
Volumetric Constitutive Response of the Solid Skeleton:
As far as the volumetric constitutive response of
the solid skeleton is concerned, it is also defined by
a solid‐material density g vs. pressure relation.
Deviatoric Response of the Solid Skeleton: The
deviatoric constitutive response of the solid
skeleton is assumed to be governed by the
extended linearized Drucker‐Prager model
[Grujicic et al. (2009a)]. Before this model can be
applied to compute the effective stress within the
solid skeleton, one must determine the fraction of
the porous‐medium strain which is allotted to the
solid skeleton, i.e. the effective strain.
The effective strain tensor can be defined as the
difference between the overall strain tensor
experienced locally by the porous medium and the

Journal Website Journal Title Volume * Issue *, Month Year
6
so‐called “moisture‐swelling strain tensor,” defined
as the sum of: (a) a volumetric strain tensor,
resulting from the wetting‐liquid pressure acting
on the solid matter; and (b) the volumetric strain
tensor produced by the entrapped liquid and gel
formation (ignored in the present work).
4) Wetting‐Liquid Continuity Equation in Porous
Media
The second governing equation for the porous
medium is the wetting‐liquid continuity equation
which relates the rate of change of the fluid mass at
a point to the net flux of the fluid at the same point.
5) Porosity Evolution Equation
This equation must be specified in order to make
the system of governing equations determinate.
Material Models
Within the present work, three types of material
constitutive models were used in order to define: (a)
the effective mechanical response of the solid skeleton;
(b) the fracture of the porous medium and the
associated fluid exchange between the rock formation
and the wellbore; and (c) the mechanical response of
the casing.
1) Extended Drucker‐Prager Solid‐Material Model
The rock‐shale‐formation layers were modeled
using the extended Drucker‐Prager material model.
This type of material model is generally used to
represent the constitutive behavior of the (frictional)
granular and geological (e.g. rock‐type) materials
which display pressure‐dependent yield behavior
(or, more specifically, which display a higher
resistance toward inelastic deformation under
higher pressures).
2) Cohesive‐Zone Porous Material Model
Hydraulic fracturing was modeled by placing
cohesive‐zone materials between the
solid/continuum portion of the model. A schematic
of three adjoining cohesive elements in the crack‐
tip region is given in Figure 2. In contrast to the
bulk‐continuum materials for which the
constitutive behavior was described in terms of
stresses, strains, strain rates, etc., the constitutive
behavior of (interfacial) cohesive materials was
more conveniently and physically more
appropriately (due to negligible thickness of the
interface) defined in terms of the (normal and
tangential) traction versus separation functional
relations.
FIGURE 2. A SCHEMATIC OF THREE ADJOINING COHESIVE
ELEMENTS IN THE CRACK‐TIP REGION, WITH THE
DIRECTIONS OF TANGENTIAL AND NORMAL/LEAKOFF
FLOW INDICATED.
3) Casing Material Model
The casing was composed of steel pipes and
cement‐based bonding layers. For simplicity, the
material of the casing was homogenized and
treated as an isotropic linear‐elastic material, with
its elastic properties scaling weighted by the
volume fractions of the steel and cement materials
in the casing.
Problem Formulation and Analysis
As mentioned earlier, the hydraulic‐fracturing process
is generally used in order to increase the output from
and lifetime of deep‐shale reservoirs of oil and natural
gas. This is accomplished by: (i) increasing the surface
area of the fuel‐bearing rock formation; and (ii)
providing a low‐resistance flow path for the fuel being
extracted. Hydraulic fracturing accomplishes these
goals through the use of high‐pressure fluids which
can overcome high compressive stresses within the
rocks and cause crack formation and growth. The
efficiency of hydraulic fracturing is mainly affected by:
(a) the extent of induced fracture; (b) the connectivity
between the fracture and the well bore; and (c) the
extent to which hydraulically‐induced fracture
intersects with naturally‐occurring rock fissures.
As discussed in greater detail in the Introduction
section of this manuscript, hydraulic fracturing is a
complex process, which involves a number of well‐
defined steps. Since these steps were described in
great detail in the Introduction section, a similar
discussion will not be provided here. However, as will
be shown later, the main hydraulic‐fracturing steps,
i.e.: (i) the geostatic equilibration step following initial
drilling/casing‐construction; (ii) hydraulic‐fracturing
fluid‐pumping step; (iii) proppant‐injection step; and
(iv) production step, are analyzed in the present work.

Journal Title Volume XX Issue XX, Month Year Journal Website
7
The main problem analyzed in the present work
involves a finite‐element analysis of the hydraulic
fracturing enhancement in the rate of extraction of the
fuel from the deep‐shale reservoir. Two specific
aspects of the problem are the focus of the work: (i) the
role of the natural fissures intersected by the hydraulic
fractures in enhancing the rate of fuel recovery from
the reservoir; and (ii) the effect of the sand
concentration in the hydraulic‐fracturing liquid and its
injection profile on the success of the hydraulic‐
fracturing process.
Numerical investigation of such a problem typically
involves the following steps: (a) specifying the
geometrical model; (b) specifying the meshed model;
(c) defining the material constitutive models; (d)
specifying initial conditions; (e) specifying boundary
conditions and loading; (f) specifying computational
algorithm and tool; and (g) estimating computational
accuracy, stability and cost.
Geometrical Model: The geometrical model analyzed in
the present work involves a three‐layer hollow
circular‐disk computational domain with the
following overall dimensions: outer radius = 200 m,
inner radius = 0.1 m, top layer thickness = 10 m,
middle layer thickness = 20 m, bottom layer thickness
= 20 m. The top surface of the computational domain is
assumed to be located at the depth of 2100 m. The
three layers analyzed include the middle layer, which
is the primary target of fuel extraction, and the top and
bottom shale layers. The inner hole in the geometrical
model was used to represent the vertical wellbore. A
schematic of the geometrical model used is displayed
in Figure 3(a).
Meshed Model: Due to the inherent symmetry of the
geometrical model about the x=0 plane, only one half
of the geometrical model described in the previous
FIGURE 3. (A) GEOMETRICAL AND (B) MESHED MODELS USED IN THE PRESENT FINITE ELEMENT ANALYSIS OF THE
HYDRAULIC‐FRACTURING PROCESS.

Journal Website Journal Title Volume * Issue *, Month Year
8
section was meshed and analyzed. The meshed model
consisted of three distinct sections: (a) a bulk section
used to represent the three rock‐formation layers. This
region is discretized using 9600 eight‐node continuum
degrees of freedom. Each of these elements also
contains an additional set of four nodes located at the
crack mid‐surface. These nodes were used to place the
additional degrees of freedom associated with the
cohesive‐zone pore‐pressure elements, i.e. the
tangential mass flow rate; and (c) a membrane region
covering the central hole of the computational domain,
and representing the wellbore casing. This section was
meshed using 480 four‐node membrane elements. A
typical finite‐element mesh used in the present work is
displayed in Figure 3(b).
Material Models: The material models used in the
present work were overviewed in Section III. It should
be recalled that: (a) an extended linearized Drucker‐
Prager model was used for the bulk materials; (b) a
linear‐elastic/linear‐damage traction vs. separation
material constitutive law with a quadratic traction‐
interaction damage‐initiation criterion and an energy‐
based mixed‐mode damage‐evolution law were
employed to model hydraulically‐induced fracturing
within the rock‐formation. In addition, a constitutive
model was used to describe the tangential (i.e. parallel
to the crack faces) flow of the hydraulic‐fracturing
fluid through the cohesive elements and their leakoff
through the crack faces; and (c) the wellbore casing
was modeled using a linear‐elastic isotropic material.
Initial Conditions: To define the initial (equilibrated)
state of the materials within the computational domain,
the following quantities and their spatial distribution
(i.e. depth‐dependence) were specified: (a) void ratio;
(b) pore pressure; and (c) gravity‐induced, geostatic,
orthotropic (compressive) stress field with the
maximum (i.e. the least negative) principal stress
being aligned in a direction orthogonal to the
cohesive‐element fracture faces (i.e. in the y‐direction).
The depth‐dependence of these quantities in the initial
configuration of the computational domain is shown
in Figures 4(a)–(c), respectively.
It should be recalled that, within the present finite‐
element model, the cohesive‐zone mid‐plane is
orthogonal to the y‐direction. Examination of the
results displayed in Figure 4(c) reveals that the normal
stress within the x‐y plane is the lowest in the y‐
direction. This is consistent with the fact that fracture
extends within a plane of least resistance, that is,
within a plane which is perpendicular to the direction
of the minimum/least‐negative principal in situ (crack‐
closing) compressive stress.
Boundary Conditions and Loading: As mentioned earlier,
the analysis carried out involved four distinct loading
steps. The following boundary/loading conditions
were applied to all four steps: (i) the symmetry
boundary conditions were applied to the x=0 plane; (ii)
the zero‐displacements in the direction of the local‐
surface normalwere applied to the bottom and the
circumferential faces of the model; (iii) the top face of
the model was subjected to the uniform (overburden)
normal surface traction; and (iv) a distributed
gravitational load was applied to all portions of the
model in the negative z‐direction. The
boundary/loading conditions unique to the four
phases were applied as follows: (a) geostatic step – in
this step, the so‐called shut‐in pressure was first
applied, in the form of surface tractions, to the
wellbore in order to ensure zero‐stress conditions
along the surface of the wellbore. Then, the overall
mechanical equilibrium was ensured through the
application of the geostatic computational analysis; (b)
hydraulic‐fracturing step – in this 30‐minute‐long
transient step, an initial 8 m long vertical, centrally‐
located perforationwas first created within the casing
of the middle layer by assigning an initial crack
opening to the associated cohesive elements. Then, a
2.5 m3/min (or 15 barrels/min) volumetric flow rate of
the hydraulic‐fracturing fluid, ramped from zero over
the first 200 s, was assigned to the perforated/pre‐
cracked cohesive elements of the casing. During this
step, increases in pressure caused: (i) crack‐opening
enlargement within the pre‐cracked and water‐filled
cohesive elements; (ii) the tangential flow of the
hydraulic‐fracturing fluid into the adjacent cohesive
elements and their fracturing; and (iii) leakoff of the
hydraulic fracturing fluid into the surrounding bulk
material; (c) proppant‐injection/retention step – in this
120‐minute‐long transient step, the sand present
within the previously‐injected fluid was retained
within the rock fractures in order to maintain these
fractures open (for providing a low‐resistance flow
path for the fuel to be extracted). This was
accomplished by: (i) terminating fluid injection into
the well, while allowing the increased pore pressure
within the fracture to bleed off into the formation; and
(ii) fixing the cohesive‐element nodes at their positions
attained at the completion of the hydraulic‐fracturing
step; and (d) production step – in this 240‐hour‐long
transient step, a (lower) drawdown pressure of 20 kPa
was applied to the wellbore nodes of the fracture

Journal Title Volume XX Issue XX, Month Year Journal Website
9
cohesive elements, which promoted reverse leakoff of
the fuel into the cohesive elements and, in turn, into
the wellbore.
FIGURE 4. INITIAL CONDITIONS USED IN THE FINITE
ELEMENT ANALYSIS TO PRESCRIBE DEPTH‐ AND LAYER‐
DEPENDENCES OF: (A) VOID RATIO; (B) PORE PRESSURE; AND
(C) NEGATIVES OF THE THREE PRINCIPAL STRESSES.
Computational Algorithm and Tool: All the calculations
carried out in the present work involved the use of a
transient, porous‐solid/viscous‐fluid coupled implicit
finite‐element algorithm. The analysis was carried out
under isothermal conditions, i.e. no thermal effects
associated with the viscous‐fluid flow or the porous
medium in elastic deformation/fracture were
considered. All the calculations were performed using
ABAQUS/Standard, a general‐purpose finite element
solver [Dassault Systemes (2011)]. To take advantage
of the more advanced features of this tool, many
aspects of the model associated with the spatially‐
varying initial conditions and time‐varying boundary
and loading conditions were handled through the use
of the appropriate user subroutines.
Computational Accuracy, Stability and Cost: A standard
mesh sensitivity analysis was carried out (the results
not shown for brevity) in order to ensure that the
results obtained were accurate, i.e. insensitive to
further reductions in the size of the elements used.
Due to the use of the implicit numerical‐solution
algorithm, the analysis carried out was
unconditionally stable. A typical analysis involving
the aforementioned durations of the four hydraulic‐
fracturing steps, followed by a detailed post‐
processing data reduction analysis, required on
average 90 minutes of (wall‐clock) time on a 12‐core,
3.0 GHz machine with 16 GB of memory.
TABLE 1. POROUS, COHESIVE AND CASING MATERIAL MODEL
PARAMETERS AND THE HYDRAULIC‐FRACTURING PROCESS PARAMETERS
USED IN THE PRESENT WORK
Parameter Symbol Units Value
Poisson’s Ratio shale/target
N/A 0.2
casing 0.3
Young’s Modulus
Eshale
GPa
8.0
Etarget 12.0
Ecasing 2.0
Friction Angle shale
deg 29
target 36
Strength Ratio Kshale
N/A 1.0
Ktarget 0.95
Dilation Angle shale
deg 29
target 36
Compressive Strength shale
MPa 30
target 38
Interfacial Stiffness Knn, Kss, Ktt GPa/m 85
Damage Initiation Tractionstshale
kPa 100
ttarget 320
Fracture Energy Gn, Gs, Gt kJ/m2 28
Fracture Exponent N/A 2.284
Fluid Viscosity kPa s 1.0
Leakoff Coefficient Kleak‐off kg/m4/s 5.88E‐7
Draw‐down Pressure Pdraw‐down MPa 20
Depth, m
Void
Ratio
,NU
2100 2110 2120 2130 21400.18
0.2
0.22
0.24
0.26
0.28
0.3
0.32
0.34
0.36
(a)
Top Layer
MiddleTarget Layer
Bottom Layer
Depth, m
Pore
Pre
ssure
,MP
a
2100 2110 2120 2130 214024.1
24.2
24.3
24.4
24.5
24.6
24.7
(b)
Top Layer
Middle Target Layer
Bottom Layer
Depth, m
Negativ
eofth
eP
rinci
palS
tress
es,
MP
a
2100 2110 2120 2130 2140
11
12
13
14
15
16
17
18
Boundary 1
Boundary 2
11
22
33
(c)
Top Layer
Middle Target Layer
Bottom Layer

Journal Website Journal Title Volume * Issue *, Month Year
10
Results and Discussion
As mentioned earlier, the present work dealt with a
finite‐element analysis of the hydraulic‐fracturing
enhancement of the rate of extraction of the fuel from
the deep‐shale reservoir, and focused on revealing: (i)
the role of the natural fissures intersected by the
hydraulic fractures in enhancing the rate of fuel
recovery from the reservoir; and (ii) the effect of sand
concentration in the hydraulic‐fracturing liquid and its
injection profile on the success of the hydraulic‐
fracturing process. A summary of the material‐model
parameters and of the hydraulic‐fracturing process
parameters (not specified in the sections dealing with
the initial and the boundary/loading conditions) is
provided in Table 1.
Prototypical Results
Before the results revealing the effect of natural
fissures and proppant concentration/injection‐profile
are presented, a few prototypical results (for the case
of target rock formation without natural fissures) are
shown and discussed in this section.
Locations of the hydraulic‐fracture front at four (300 s,
600 s, 900 s, and 1200 s) times during the
pumping/hydraulic‐fracturing step are depicted, as a
contour plot, in Figure 5. The results show that the
fracture primarily extends, within the 20 m‐thick rock‐
formation target layer, in the radial (i.e. x‐) direction,
and that the fracture growth in the vertical (i.e. z‐)
direction is restricted within the target 20 m‐thick
middle layer, despite the presence of the surrounding
(more compliant) shale layers.
FIGURE 5. A CONTOUR PLOT SHOWING A PORTION OF THE
X–Z “FRACTURE” PLANE AND THE LOCATIONS OF THE
HYDRAULIC‐FRACTURE FRONT AT FOUR (300 S, 600 S, 900 S,
AND 1200 S) DIFFERENT TIMES DURING THE
PUMPING/HYDRAULIC‐FRACTURING STEP.
The variation of fracture opening over the x‐z plane at
the aforementioned four times during the pumping
step is depicted in Figures 6(a)–(d). A comparison of
the results displayed in these figures shows that, at
earlier times, a fracture is accompanied by an increase
in the extent of its opening over the entire fracture
surface. On the other hand, at the later stages of
fracture, increase in the fracture opening occurs
mainly in the region near the fracture front, where
new fracture surfaces are created. In other words,
previously‐fractured regions appear to have reached
the state of nearly‐constant fracture opening. In other
words, previously‐fractured regions appear to have
reached the state of nearly‐constant fracture opening.
FIGURE 6. VARIATION OF FRACTURE OPENING (IN MM) OVER
THE X–Z PLANE AT FOUR: (A) 300 S; (B) 600 S; (C) 900 S; AND (D)
1200 S TIMES DURING THE
PUMPING/HYDRAULICFRACTURING STEP.
The variation of the pore pressure over the x‐z plane at
the same four times during the pumping step is
depicted in Figures 7(a)–(d). Examination of the results
displayed in these figures reveals that: (a) at the earlier
times, pore pressure at the wellbore site acquires very
high values, which rapidly decline with distance from
the wellbore, undershooting the pressure level present
in the rock formation before fracture (ca. 24.7 MPa).
The pressure then gradually recovers, with an increase

Journal Title Volume XX Issue XX, Month Year Journal Website
11
in distance from the wellbore, towards its pre‐
pumping value. This behavior is consistent with the
fact that hydraulic‐induced fracturing is controlled by
the creation of new fracture surfaces at the fracture
front, the process which requires a substantial increase
in the hydraulic pressure within the existing fracture.
However, once new fracture surfaces are created, the
high pressure causes their rapid separation and the
high pressure causes their rapid separation and the
associated large drop in the local pore pressure within
the fracture (in the region adjacent to the fracture
front); and (b) at later simulation times, the pressure at
the wellbore site acquires smaller values which are
retained over a large portion of the fracture surface.
However, as in the case of the shorter times within the
pumping stage, pressure still experiences a drop
below, and subsequent recovery towards, its pre‐
pumping level at the fracture‐front region.
FIGURE 7. VARIATION OF PORE PRESSURE (IN MPa) OVER THE
FRACTURED PORTION OF THE X‐Z PLANE AT FOUR: (A) 300 S;
(B) 600 S; (C) 900 S; AND (D) 1200 S TIMES DURING THE
PUMPING/HYDRAULIC‐FRACTURING STEP.
One of the ways of judging the effectiveness of the
hydraulic‐fracturing process in stimulating fuel
extraction from the deep‐seated reservoirs is to
compare the volumetric rates (commonly referred to
as “yield”) of the extracted fuel for the two identical
wellbore and reservoir scenarios except that hydraulic
fracturing is carried out in one case but not in the
other case. Such a comparison was carried out in
Figure 8, in which time‐dependence of the yield was
plotted for the two cases. Examination of the results
displayed in Figure 8 shows that, as a result of
applying hydraulic fracturing, the yield increased by
more than two orders of magnitude. This finding
suggests that, for the combination of the rock‐ and
shale‐formation properties and the set of hydraulic‐
fracturing process conditions considered in the present
finite element analyses, hydraulic fracture yielded
considerable benefits relative to the enhancement in
the fuel‐extraction efficiency.
FIGURE 8. THE EFFECT OF HYDRAULIC FRACTURING ON THE
TEMPORAL EVOLUTION OF THE VOLUMETRIC EXTRACTION
RATES OF THE FUEL.
It should be noted that the results presented in this
section, as well as in the subsequent section, were
obtained using a prototypical sand‐injection profile, as
depicted in Figure 9. On the other hand, in Section
IV.3, the sand‐injection profile was varied and the
effect of this variation was examined. It should be
further noted that sand was not treated explicitly
within the present finite‐element analysis. Rather, its
presence within the hydraulic‐fracturing fluid was
accounted for by quantifying its effect on the effective
viscosity of this fluid. This was done by utilizing the
following fluid‐viscosity, , vs. sand‐concentration, c,
functional relation [Adachi et al. (2007); Grujicic et al.
(2010)]:
7.165.011.0 c (1)

Journal Website Journal Title Volume * Issue *, Month Year
12
In addition, the propping effect of sand was accounted
for by fixing the nodes at the fracture surface, within
the sand‐retention and production steps, at their
positions acquired at the end of the pumping step.
FIGURE 9. PROTOTYPICAL SAND‐INJECTION PROFILE IN THE
HYDRAULIC‐FRACTURING FLUID DURING
THE PUMPING STEP.
The Role of Natural Fissures
Rock formations are treated in the present work as a
porous medium consisting of a solid skeleton and fuel‐
saturated fine‐scale interconnected pores. Due to the
fine‐scale nature of the pores, the hydraulic
conductivity (a measure of the ease with which fuel
flows through the porous medium) is not very high.
This negatively affects the rate of fuel extraction from
the deep‐seated reservoirs. However, the rock
formation also contains natural flaws such as cracks,
fissures, crevices, etc. The presence of these flaws
(henceforth referred to as fissures), if intersected by
the hydraulic fractures, may improve the efficiency of
fuel extraction. This could be the result of an increase
in the “effective” fracture surface (the surface through
which the fuel trapped within the target‐rock
formation is entering the fracture) and/or a result of
the introduction of additional larger‐size flow
channels with larger hydraulic conductivity. Due to a
larger difference in the size of the fissures (mm to cm
long), and the hydraulic fractures (tens of meters long),
the fissures could not be modeled explicitly (i.e. as
discrete entities within the continuum rock‐formation).
Rather, their effect is modeled through the proper
adjustment of some of the bulk porous‐material model
parameters. Specific parameters adjusted to account
for the effect of the natural fissures include: (i) void
ratio of the porous medium elements bordering the
hydraulic fracture; and (ii) the leakoff coefficient. The
extent of these corrections was treated as a function of
the number density, Nf , and the average size, Vf , of
the fissures. The product of these two quantities
defines the additional porosity associated with the
presence of the fissures, which is next used in the
relations described in Section II.1.1 to adjust the void
ratio of the porous‐medium elements mentioned
above. As far as the effect of fracture‐intersected
fissures on the leakoff coefficient is concerned, an
approach is used within which a functional
relationship is postulated between the hydraulic
conductivity and the soil‐grain size. By treating the
fissures as being equal‐sized, constant aspect ratio A
(>1), oblate spheroidals, the following simplified
functional form for the leakoff coefficient leakoffK was
obtained:
20 log1 AVNKK ffleakoffleakoff (2)
where 0leakoffK is the reference value of this coefficient.
More details regarding the derivation of Eq. (2) will be
provided in a future communication.
The effect of the NfVf product and the fissures’ aspect
ratio on the percent increase in the extraction yield (at
extraction times long enough to ensure a fairly
constant/steady value of the yield) relative to the case
of hydraulic fracturing of “fissure‐free” rock formations
(the reference case), is depicted in Figure 10.
Examination of the results displayed in this figure
reveals that: (a) both an increase in the NfVf product
and the fissures’ aspect ratio result in an increase in
the fuel‐extraction yield. The effect of the NfVf product
can be attributed to an increase in the porous‐medium
permeability due to the increase in the effective void
ratio within this medium. The effect of the fissures’
aspect ratio, on the other hand, is manifested through
an increase in the effective fracture‐surface area; and
(b) for the range of the NfVf product and the fissures’
aspect ratio considered, increases in the fuel‐extraction
yield as high as ca. 5% relative to the reference case
can be obtained.
The Effect of Sand Concentration and Injection Profile
In this section, hydraulic fracturing of fissure‐free rock
formations was again considered. In addition, all the
model/process parameters, except for the sand
concentration and injection profile within the
hydraulic‐fracturing fluid, were set equal to their
values used in the reference case, Section IV.1.
Examination of Figure 9 shows that a prototypical

Journal Title Volume XX Issue XX, Month Year Journal Website
13
sand‐injection profile involves a linear increase in the
sand concentration with time, beginning with a sand‐
injection start‐time, to a target final value, attained at
the sand‐injection end‐time. Thus, the sand‐injection
profile contains three parameters: the injection start‐
time, the sand‐target final concentration, and the sand‐
injection end‐time (or the sand‐injection duration). In
the present work, the sand‐injection start‐time is fixed
at seven min of the pumping time and the remaining
two parameters are varied in the following range: (a)
the sand concentration ‐ 400 to 800 kg/m3 ; and (b) the
injection duration ‐ 2 to 12 min. The effect of the sand
concentration and the injection duration on the
percent change in the extraction yield relative to the
reference case (characterized by the maximum sand
concentration of 600 kg/m3 and injection duration of 7
min) analyzed in Section IV.1, is depicted in Figure 11.
Examination of the results displayed in this figure
reveals that: (a) there is an optimal combination of the
sand concentration and the injection duration which
maximizes the fluid‐extraction yield; and (b) the
optimal combination of the sand concentration and
injection duration which maximizes the fluid‐
extraction yield is associated with the intermediate
values of the sand concentration and the longest
values of the injection duration.
FIGURE 10. THE EFFECT OF THE NFVF PRODUCT AND THE
FISSURES’ ASPECT RATIO ON THE RELATIVE CHANGE (IN
PERCENT) IN THE EXTRACTION YIELD WITH RESPECT TO
THE CASE OF HYDRAULIC FRACTURING OF “FISSURE‐FREE”
ROCK FORMATIONS (THE REFERENCE CASE).
Careful examination of the hydraulically‐induced
fractures and their extensions over the fracture plane
and fracture opening profile, the results not shown for
brevity, provided rationale for the results displayed in
Figure 11. That is: (a) as the sand concentration
increases, the increased hydraulic‐fracture fluid
viscosity gives rise to an increase in the hydraulic
pressure within the fracture. This condition leads to a
desired enhancement in the extent of hydraulic
fracturing; (b) a further increase in the sand
concentration/fluid viscosity makes the flow of the
hydraulic‐fracturing fluid, within the fracture, a rate‐
controlling process. That is, the associated increase in
the fluid viscosity and hydraulic pressure increases the
opening of the already formed fractures, but does not
significantly contribute to the extension of the fracture
along its length; and (c) the undesirable effects
associated with excessive sand concentrations can be
alleviated if the injection of the sand is done in a more
gradual manner (i.e. if the sand‐injection concentration
is increased slowly).
FIGURE 11. THE EFFECT OF THE SAND CONCENTRATION
AND THE INJECTION DURATION ON THE RELATIVE CHANGE
(IN PERCENT) IN THE EXTRACTION YIELD RELATIVE TO THE
REFERENCE CASE.
Summary and Conclusions
Based on the work presented and discussed in the
present manuscript, the following main summary
remarks and conclusions can be made:
1. Finite‐element analysis of the hydraulic‐fracturing
process used to stimulate fuel‐extraction from deep‐
seated reservoirs can provide a highly beneficial
insight into and quantification of the associated
phenomena and processes. Direct experimental
observation and quantification of these phenomena
could be either quite challenging or impossible.
2. The present work suggests that the reliability and
accuracy of the finite element analysis of the

Journal Website Journal Title Volume * Issue *, Month Year
14
hydraulic‐fracturing processare greatly affected by the
knowledge of the lithography, including fissure/flow
content and the constitutive response of the rock
formation targeted for fuel extraction.
3. The work also shows that the finite element analysis
could be used to optimize the hydraulic fracturing
process by providing a valuable insight into the
optimal start time and duration of different hydraulic‐
fracturing steps, as well as of the optimal process
conditions (e.g. sand concentration and its injection
time into the hydraulic‐fracturing fluid).
REFERENCES
Adachi, A., Siebrits, E., Peirce, A., and Desroches, J.,
“Computer simulation of hydraulic fractures.”
International Journal of Rock Mechanics and Mining
Sciences, 44 (2006): 739–757.
Clifton, R. J., Three‐Dimensional Fracture‐Propagation
Model. In “Recent Advances in Hydraulic Fracturing ‐
SPE Monograph,” 95–108, 1989.
Dassault Systèmes, ABAQUS Version 6.10EF, Theory
Manual, 2011.
Gassiat, C., Gleeson, T., Lefebvre, R., McKenzie, J.,
“Hydraulic fracturing in faulted sedimentary basins:
Numerical simulation of potential contamination of
shallow aquifers over long time scales.” Water Resources
Research, 49 (2013): 8310‐8327.
Grujicic, M., and Cao, G., “Crack Growth in Lamellar
Titanium Aluminides Containing Dispersed Beta Phase
Precipitates.” Journal of Materials Science, 37 (2002):
2949–2963.
Grujicic, M., He, T., Pandurangan, B., Bell, W. C., Coutris, N.,
Cheeseman, B. A., Roy, W. N., and Skaggs, R. R.,
“Development, Parameterization and Validation of a
Visco‐Plastic Material Model for Sand With Different
Levels of Water Saturation.” Journal of Materials: Design
and Applications, 223 (2009a): 63–81.
Grujicic, M., Sellappan, V., Kotrika, S., Arakere, G., Obieglo,
A., Erdmann, M., and Holzleitner, J., “Suitability
Analysis of a Polymer Metal Hybrid Technology Based
on High‐Strength Steels and Direct Polymer‐to‐Metal
Adhesion for Use in Load‐Bearing Automotive Body‐In‐
White Applications.” Journal of Materials Processing
Technology, 209 (2009b): 1877–1890.
Grujicic, M., Pandurangan, B., Coutris, N., Cheeseman, B. A.,
Roy, W. N., and Skaggs, R. R., “Derivation,
Parameterization and Validation of a Sandy‐Clay
Material Model for Use in Landmine Detonation
Computational Analyses.” Journal of Materials
Engineering and Performance, 19 (2010): 434–450.
Grujicic, M., Pandurangan, B., Cheeseman, B. A., and Yen,
C.‐F., “Spall‐fracture Physics and Spallation Resistance‐
based Material Selection.” Journal of Materials
Engineering and Performance, 21 (2012): 1813–1823.
Grujicic, M., Yavari, R., Snipes, J. S., Ramaswami, S.,
“Discrete Element Modeling and Analysis of Structural
Collapse/Survivability of a Building Subjected to
Improvised Explosive Device (IED) Attack.” Advances in
Materials Science and Applications, 2 (2013a): 9–24.
Grujicic, M., Snipes, J. S., and Chandrasekharan, N., “A
Simple Model For the Prediction of the Ballistic Limit In
Thick‐Section Composite Laminates,” International
Journal of Engineering Practical Research, 2 (2013b): 31–
48.
Grujicic, M., Yavari, R., Ramaswami, S., Snipes, J. S., and
Galgalikar, R., “Three‐Dimensional Finite Element
Analysis of the Hydraulic‐Fracturing Process.”
International Journal of Engineering Practical Research, 2
(2013c): 129–138.
Jeffrey, R. G., Settari, A., Mills, K. W., Zhang, X., and
Detournay, E., “Hydraulic fracturing to induce caving:
fracture model development and comparison to field
data.” Rock Mechanics in the National Interest, 1–2
(2001): 251–259.
Lecampion, B., “An extended finite element method for
hydraulic fracture problems.” Communications in
Numerical Methods in Engineering, 25 (2009): 121–133.
Lv, Z., Li, S., Liu, G., Zhang, Z., Guo, X., “Factors Affecting
the Productivity of a Multifractured Horizontal Well.”
Petroleum Science and Technology, 31 (2013): 2325‐2334.
Peirce, A., and Detournay, E., “An implicit level set method
for modeling hydraulically driven fractures.” Computer
Methods in Applied Mechanics and Engineering, 197
(2008): 2858–2885.
Zhang, J., Biao, F. J., Zhang, S. C., Wang, X. X., “A Numerical
Study on Horizontal Hydraulic Fracture.” Journal of
Petroleum Exploration and Production Technology, 2
(2012): 7–13.

Journal Title Volume XX Issue XX, Month Year Journal Website
15
Zhang, X., Jeffrey, R. G., and Thiercelin, M., “Deflection and
propagation of fluid‐driven fractures at frictional
bedding interfaces: A numerical investigation.” Journal
of Structural Geology, 29 (2007): 396–410.
Zhao, C. B., Hobbs, B. E., Ord, A., and Peng, S. L., “Particle
simulation of spontaneous crack generation associated
with the laccolithic type of magma intrusion processes.”
International Journal for Numerical Methods in
Engineering, 75 (2008): 1172–1193.
Zhang, G. M., Liu, H., Zhang, J., Wu, H. A., Wang, X. X.,
“Three‐dimensional finite element simulation and
parametric study for horizontal well hydraulic fracture.”
Journal of Petroleum Science and Engineering 72 (2010):
310–317.
Zhu, H. Y., Deng, J. G., Chen, Z. J., An, F. C., Liu, S. J., Peng,
C. Y., Wen, M., Dong, G., “Perforation optimization of
hydraulic fracturing of oil and gas well.” Geomechanics
and Engineering, 5 (2013): 463‐483.
Related Documents