*[email protected]; phone 1 215 204-7805 Computational design optimization of a SMA-based active steerable needle Bardia Konh a and Parsaoran Hutapea* a a Dept. of Mech. Engr., Temple University, 1947 N 12 th street, Philadelphia, PA, USA 19122 ABSTRACT Shape memory alloy (SMA) actuated needle is currently being developed to assist surgeons/physicians in their percutaneous interventional procedures. The proposed active surgical needle can potentially compensate the possible misplacements of the needle tip in the tissue benefiting from the improved navigation provided by the attached SMA actuators. In this study finite element tools have been utilized in order to maintain an optimum design of the active needle configuration. There are several parameters involved in the design affecting the active needle’s applicability and maneuverability; among them are the length, diameter and the maximum residual strain of the SMA wires, the stiffness and diameters of the surgical needle and the offset distance between the needle and the actuator. For analyzing the response of the active needle structure a parametric model was developed in ANSYS. This model was linked to the automated optimization tools for an improved design of the active needle. The most sensitive parameters affecting the active needle’s steerability were found to be the offset distance and the length of the needle. Considering the results and the clinical limitations, an improved design of the active needle was presented. Keywords: Design optimization, shape memory alloy, active needle, biomedical applications, medical devices 1. INTRODUCTION Active surgical needles are interested to be developed to assist surgeons and physicians in their percutaneous interventional procedures. So many researchers have studied different methods to activate the surgical needles. For instance Tang et al. 1 used magnetic forces in order to help the navigation of the needle inside the body. In another work Ayvali et al. 2 utilized pre-curved SMA wires on the needle body to provide external actuations. The wires, which were initially straight, transform to a pre-curved shape when heated. Similarly, Ryu et al. 3 used internal laser heating of SMA wires to bend the needle. The nonlinear beam deflection via actuation of a SMA wire was studied by Shu et al. 4 . The Shape memory alloy (SMA) actuated surgical needle of figure 1 was proposed by Konh et al. 5,6 . This configuration of active needle 7,8 privileging from the attached actuators can potentially compensate the possible misplacements of the needle tip in the tissue. As shown in the figure the needle can benefit from the improved navigation that is provided the attached SMA wire actuators 9 reaching target locations. Figure 1. Schematic of the active needle design. The needle behavior inserted to the patient’s body has to be investigated to help understanding the active needles. Mechanics of an active needle inside tissue was studied by Datla et al. 10,11 using an analytical approach. Also behavior of a surgical needle within the tissue and the consequent probable thermal damage due to the existence of heating elements were studied by in our previous work 12 . The SMA wires are the active components of our design. Knowledge of SMA material behavior is critical for the design and development of devices in which actuation capabilities of SMAs are utilized. Therefore in depth studies on the characteristics of the wires are important. In the last two decades, some constitutive

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

*[email protected]; phone 1 215 204-7805
Computational design optimization of a SMA-based active steerable
needle Bardia Konha and Parsaoran Hutapea*a
aDept. of Mech. Engr., Temple University, 1947 N 12th street, Philadelphia, PA, USA 19122
ABSTRACT
Shape memory alloy (SMA) actuated needle is currently being developed to assist surgeons/physicians in their
percutaneous interventional procedures. The proposed active surgical needle can potentially compensate the possible
misplacements of the needle tip in the tissue benefiting from the improved navigation provided by the attached SMA
actuators. In this study finite element tools have been utilized in order to maintain an optimum design of the active needle
configuration. There are several parameters involved in the design affecting the active needle’s applicability and
maneuverability; among them are the length, diameter and the maximum residual strain of the SMA wires, the stiffness
and diameters of the surgical needle and the offset distance between the needle and the actuator. For analyzing the response
of the active needle structure a parametric model was developed in ANSYS. This model was linked to the automated
optimization tools for an improved design of the active needle. The most sensitive parameters affecting the active needle’s
steerability were found to be the offset distance and the length of the needle. Considering the results and the clinical
limitations, an improved design of the active needle was presented.
Keywords: Design optimization, shape memory alloy, active needle, biomedical applications, medical devices
1. INTRODUCTION
Active surgical needles are interested to be developed to assist surgeons and physicians in their percutaneous interventional
procedures. So many researchers have studied different methods to activate the surgical needles. For instance Tang et al. 1
used magnetic forces in order to help the navigation of the needle inside the body. In another work Ayvali et al. 2 utilized
pre-curved SMA wires on the needle body to provide external actuations. The wires, which were initially straight,
transform to a pre-curved shape when heated. Similarly, Ryu et al. 3 used internal laser heating of SMA wires to bend the
needle. The nonlinear beam deflection via actuation of a SMA wire was studied by Shu et al. 4. The Shape memory alloy
(SMA) actuated surgical needle of figure 1 was proposed by Konh et al. 5,6. This configuration of active needle 7,8
privileging from the attached actuators can potentially compensate the possible misplacements of the needle tip in the
tissue. As shown in the figure the needle can benefit from the improved navigation that is provided the attached SMA wire
actuators 9 reaching target locations.
Figure 1. Schematic of the active needle design.
The needle behavior inserted to the patient’s body has to be investigated to help understanding the active needles.
Mechanics of an active needle inside tissue was studied by Datla et al. 10,11 using an analytical approach. Also behavior of
a surgical needle within the tissue and the consequent probable thermal damage due to the existence of heating elements
were studied by in our previous work 12. The SMA wires are the active components of our design. Knowledge of SMA
material behavior is critical for the design and development of devices in which actuation capabilities of SMAs are utilized.
Therefore in depth studies on the characteristics of the wires are important. In the last two decades, some constitutive
models have been provided for SMAs based on quasistatic assumptions 13. One-dimensional (1D) thermomechanical and
actuation properties of SMA wires were discussed in 14,15, especially for actuation utilization. One of the most famous
models were suggested by Brinson 16. This model could predict the phase transformation of the wires coherently. Input
parameters to the Brinson model such as transformation temperatures and Clausius-Clapeyron coefficients (which are the
slopes of the lines where transformation starts and ends) and the Young’s modulus of austenite and martensite were
obtained from experiments. Prior to implementation of the model, the characteristic parameters should be determined
experimentally.
Many groups discussed the optimization of active systems for example a design optimization for an actuated robotic
catheter was done by Crews and Buckner 17. They implemented a free energy model into finite element analysis (FEA)
package, COMSOL for their optimization strategies. To dampen the structural vibration, Ozbulut et al. 18 optimized the
installation of a SMA wire based on a genetic algorithm. Although their works cover many aspects of structural analysis,
there are still some limitations such as SMA’s constitutive model and the computationally expensive run time. The inelastic
transformation strain of SMAs as an independent quantity has not been implemented in such methods; therefore a new
empirical curve at each modified design configuration was required.
In this study finite element tools have been utilized in order to maintain an optimum design of the active needle
configuration. There are several parameters involved in the design affecting the active needle’s applicability and
maneuverability. Among them are the length, diameter and the maximum residual strain of the SMA wires, the stiffness
and diameters of the surgical needle and the offset distance between the needle and the actuator. The best design
configuration was found using well-established methods and implementing appropriate tools. These tools were used in
optimization algorithm to perform a predictive analysis seeking the best configuration. For analyzing the response of the
active needle structure a parametric model was developed in ANSYS. This model was linked to the automated optimization
tools for improved needle designs.
2. FINITE ELEMENT MODEL
2.1. Optimization using finite element analyses
Engineering analysis tools were used to optimize the active needle configuration. Design optimization of structures with
active materials can be a challenging endeavor. The automated simulation process presented here made it possible to have
an efficient assessment of the structural response of our design. The thermomechanical behavior of SMAs needs to be
included in the analysis. The model shown in figure 2 was developed for FE analysis of the SMA actuated needle. The
strain response of the SMA wire was approximated while subjected to thermally actuation. To have a good approximation,
the strain response of the wires was evaluated at different stress levels to find their contraction range. For each constant-
stress level of each wire, three repetitive measurements were performed to ensure material stable behavior. This strain
response of the wire, transformation from martensite to austenite, was estimated by defining the thermal expansion
coefficient, α, as -0.0096/ºC. This value of α was producing the same strain response as the wire temperature rises from
austenite start to austenite finish temperature. The negative sign of α shows that by increasing the temperature above
austenite start the material goes through the smaller crystallographic shape of austenite phase. Element BEAM188 and
SOLID185 were used for the wire and the cannula, respectively.
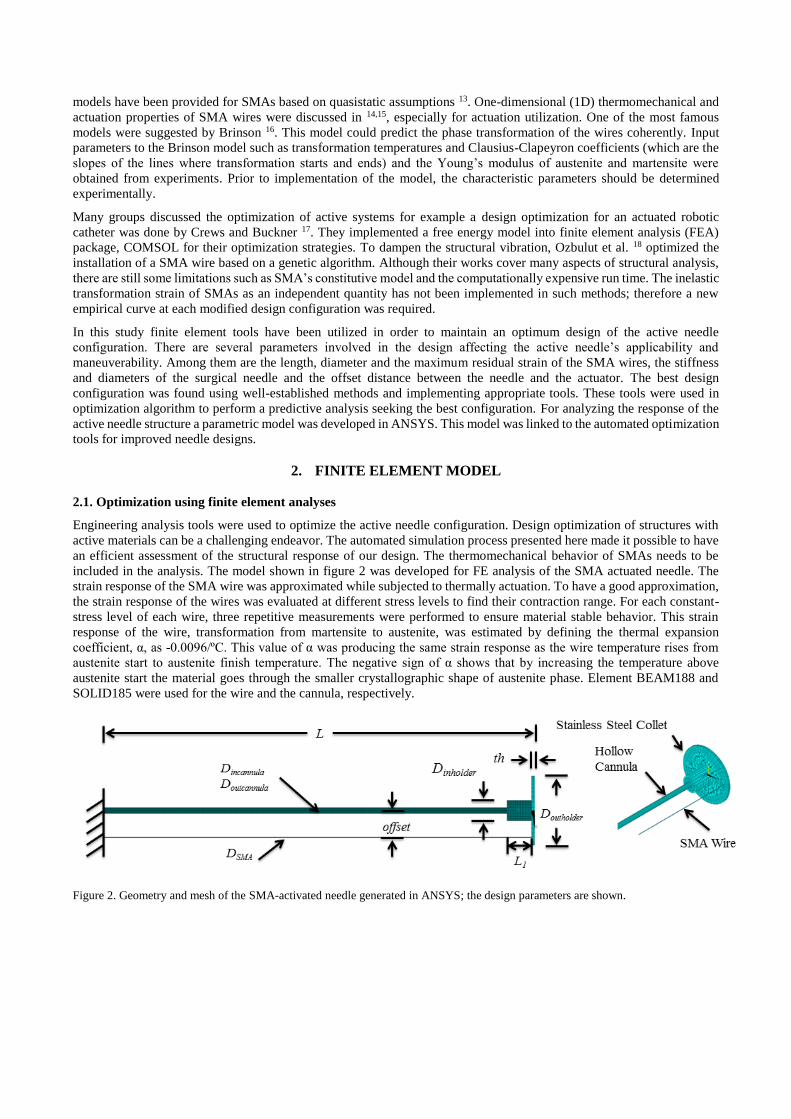
Figure 2. Geometry and mesh of the SMA-activated needle generated in ANSYS; the design parameters are shown.
To improve the flexibility of the active cannula, the effects of influencing parameters were taken into account. These
parameters include the cannula’s diameter and Young’s modulus, the SMA wire diameter, its pre-strain and its offset
from the neutral axis of cannula. The finite element model explained above was used for explore of the effects of these
involving design parameters through the optimization process. A 100mm long SMA wire attached to the needle with a
stainless steel holder was considered for the primarily design. Once this task was accomplished, a large collection of
samples and a response surface based on the objectives and constraints is forming as a global overview. The design
optimization was performed aiming the maximum deflection of the active needle to ensure its enhanced maneuverability.
The best design parameters resulting in the highest needle deflection were found using the Multi-Objective Genetic
Algorithm (MOGA) with evolving choices of candidate points in their domain. This optimization algorithm starts from
an initial design point and iterates through the whole domain with the samples evolving genetically until the best case is
found.
2.2. Experimental evaluations of the FE model
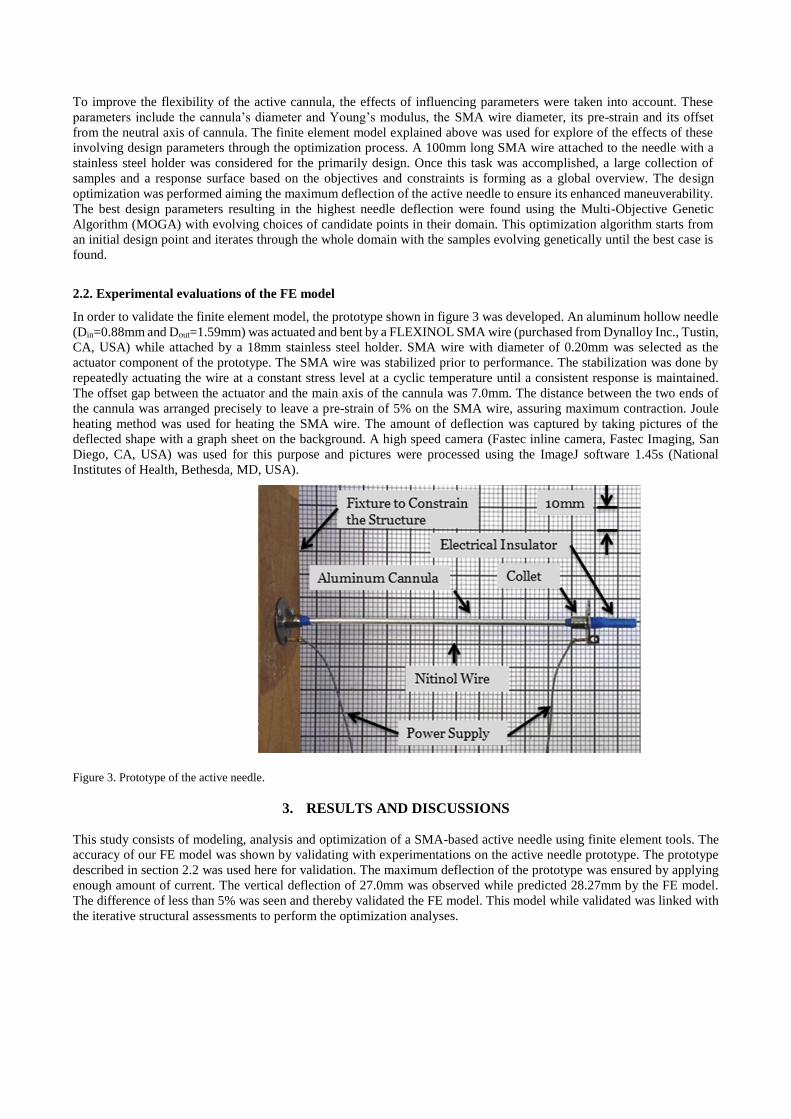
In order to validate the finite element model, the prototype shown in figure 3 was developed. An aluminum hollow needle
(Din=0.88mm and Dout=1.59mm) was actuated and bent by a FLEXINOL SMA wire (purchased from Dynalloy Inc., Tustin,
CA, USA) while attached by a 18mm stainless steel holder. SMA wire with diameter of 0.20mm was selected as the
actuator component of the prototype. The SMA wire was stabilized prior to performance. The stabilization was done by
repeatedly actuating the wire at a constant stress level at a cyclic temperature until a consistent response is maintained.
The offset gap between the actuator and the main axis of the cannula was 7.0mm. The distance between the two ends of
the cannula was arranged precisely to leave a pre-strain of 5% on the SMA wire, assuring maximum contraction. Joule
heating method was used for heating the SMA wire. The amount of deflection was captured by taking pictures of the
deflected shape with a graph sheet on the background. A high speed camera (Fastec inline camera, Fastec Imaging, San
Diego, CA, USA) was used for this purpose and pictures were processed using the ImageJ software 1.45s (National
Institutes of Health, Bethesda, MD, USA).
Figure 3. Prototype of the active needle.
3. RESULTS AND DISCUSSIONS
This study consists of modeling, analysis and optimization of a SMA-based active needle using finite element tools. The
accuracy of our FE model was shown by validating with experimentations on the active needle prototype. The prototype
described in section 2.2 was used here for validation. The maximum deflection of the prototype was ensured by applying
enough amount of current. The vertical deflection of 27.0mm was observed while predicted 28.27mm by the FE model.
The difference of less than 5% was seen and thereby validated the FE model. This model while validated was linked with
the iterative structural assessments to perform the optimization analyses.
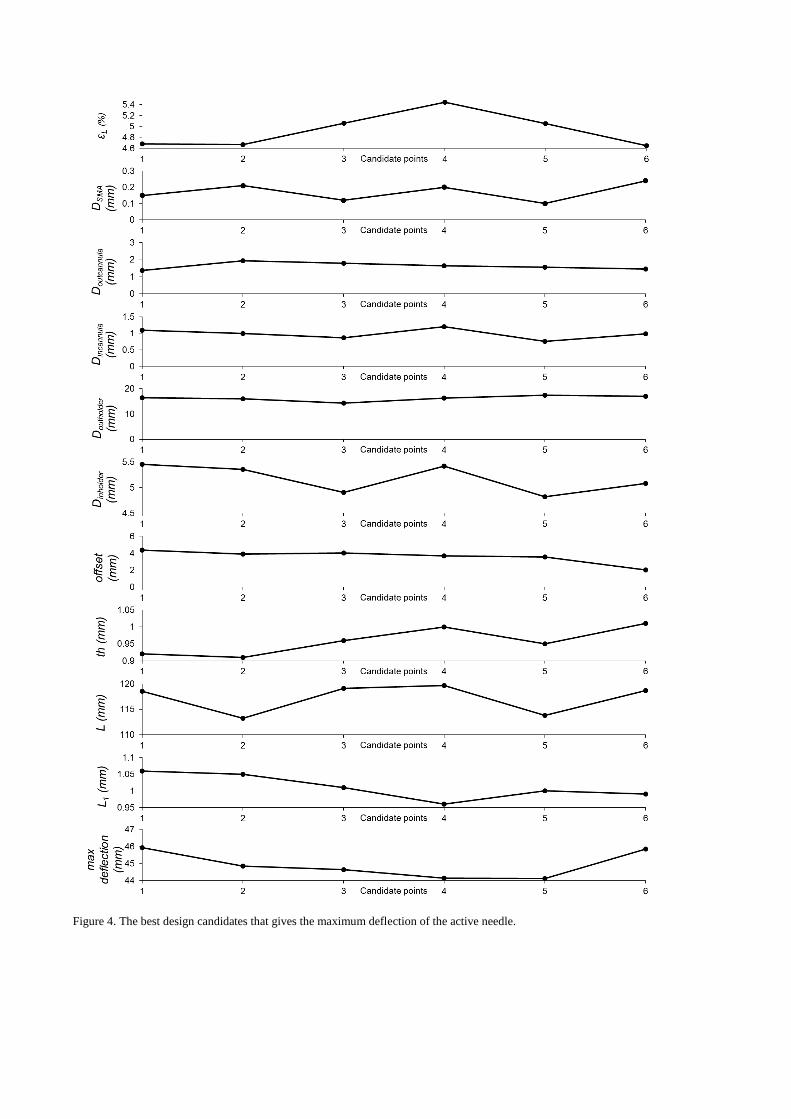
Figure 4. The best design candidates that gives the maximum deflection of the active needle.
In our design optimization, the maximum possible needle tip deflection was aimed for maximum flexibility while the stress
on SMA wire was kept smaller than a critical value. The input design variables were: εL as the maximum residual strain of
SMA wires with different diameters, DSMA as the SMA wire diameter, Doutcannula/Dincannula as the cannula’s outer and inner
diameters, the offset distance between the neutral axis of cannula and SMA wire, Doutholder/Dinholder as the outer and inner
diameter of the holder, th as the holder’s thickness, L as the total length of the needle and L1 as the holder’s length. The
total deflection of the needle tip (δtip) and the maximum stress (σmax) of all elements were taken as desired output variables.
The length of the SMA wire as well as the offset distance between the needle and the SMA wire were found to be the most
effective parameters on the needle deflection. The optimized design resulted in a maximum deflection of 45.84mm with a
118.64mm long SMA wire. The convergence achieved after 11 total iterations and 594 evaluations resulted in 6 best
candidates for the active needle design.
4. CONCLUSIONS
The MOGA method of optimization was performed in this article to find the best design of the active needle. This method
provides a refined approach seeking among all design points. Also among all input parameters the offset, the cannula’s
length and the cannula’s outer diameter were shown to be the most influential parameters on the needle tip deflection. A
clinical issue has to be considered in the design to minimize tissue rupture while inserting the needle. The amount of
rupture is directly proportional to the maximum distance between the SMA wire and the cannula, which happens at the
needle’s mid length. Therefore, minimizing this gap will reduce the amount of rupture. This can be achieved by dividing
the length into several sections. To demonstrate this, a case study with two sections having half length of the SMA wire
was designed to investigate how much this gap can be decreased. The study showed 44.06mm deflection assuming two
sections compared to 45.84mm deflection of the past one section model. However, the gap decreased from 2.56mm to
1.47mm. This clearly showed that a less destructive active needle can be made by increasing the number of sections.
ACKNOWLEDGEMENT
This work is supported by the Department of Defense CDMRP Prostate Cancer Research Program (Grant # W81XWH-
11-1-0398).
REFERENCES
[1] Tang, L., Chen, Y.., He, X., “Magnetic force aided compliant needle navigation and needle performance
analysis,” IEEE Int. Conf. Robot. Biomimetics, 612–616, Sanya, China, Dec 2007 (2007).
[2] Ayvali, E., Liang, C. P., Ho, M., Chen, Y.., Desai, J. P., “Towards a discretely actuated steerable cannula for
diagnostic and therapeutic procedures,” Int. J. Rob. Res. 31(5), 588–603 (2012).
[3] Ryu, S. C., Renaud, P., Black, R. J., Daniel, B. L.., Cutkosky, M. R., “Feasibility study of an optically actuated
MR-Compatible active needle,” IEEE/RSJ Int. Conf. Intell. Robot. Syst., 2564–2569, Ieee (2011).
[4] Shu, S. G., Lagoudas, D. C., Hughes, D.., Wen, J. T., “Modeling of a flexible beam actuated by shape memory
alloy wires,” J. Smart Mater. Struct. 265(6), 265–277 (1997).
[5] Konh, B., Datla, N. V., Hutapea, P., “Feasibility of SMA wire actuation for an active steerable cannula,” J. Med.
Device., (accepted) (2014).
[6] Konh, B., Honarvar, M.., Hutapea, P., “Application of SMA wire for an active steerable cannula,” ASME Conf.
Smart Mater. Adapt. Struct. Intell. Syst., 1–5, Snowbird, UT, Sep 16-18 (2013).
[7] Konh, B.., Hutapea, P., “Finite element simulation of an active surgical needle for prostate brachytherapy,” 1st
Annu. Front. Med. devices Appl. Comput. Model. Simul., 1–2, Washington, DC, Sep 11-13 (2013).
[8] Konh, B., Datla, N. V., Hutapea, P., “Dynamic estimation of an active surgical needle deflection for
brachytherapy procedures,” 40th Annu. Northeast Bioeng. Conf., 1–2, Boston, MA, Apr (2014).
[9] Honarvar, M., Datla, N. V., Konh, B., Podder, T. K., Dicker, A. P., Yu, Y.., Hutapea, P., “Study of unrecovered
strain and critical stresses in one-way shape memory Nitinol,” Mater. Eng. Perform. 23(8), 2885–2893 (2014).
[10] Datla, N. V., Konh, B., Honarvar, M., Podder, T. K., Dicker, A. P., Yu, Y.., Hutapea, P., “A model to predict
deflection of bevel-tipped active needle advancing in soft tissue,” Med. Eng. Phys. 36(3), 258–293 (2013).
[11] Datla, N. V., Konh, B.., Hutapea, P., “A flexible active needle for steering in soft tissues,” 40th Annu. Northeast
Bioeng. Conf., 1–2, Boston, MA, Apr (2014).
[12] Datla, N. V., Konh, B., Koo, J., Daniel, W. C., Yu, Y., Dicker, A. P., Podder, T. K., Darvish, K.., Hutapea, P.,
“Polyacrylamide phantom for self-actuating needle-tissue interaction studies,” Med. Eng. Phys. 36(1), 140–145
(2014).
[13] Tanaka, K., Kobayashi, S.., Sato, Y., “Thermomechanics of transformation pseudoelasticity and shape memory
effect in alloys,” Int. J. Plast. 2, 59–72 (1986).
[14] Datla, N. V., Honarvar, M., Nguyen, T. M., Konh, B., Darvish, K., Yu, Y., Dicker, A. P., Podder, T. K..,
Hutapea, P., “Towards a nitinol actuator for an active surgical needle,” ASME Conf. Smart Mater. Adapt. Struct.
Intell. Syst., 8205 1–5, Stone Mountain, GA, Sep 19-21 (2012).
[15] Honarvar, M., Konh, B., Datla, N. V., Devlin, S.., Hutapea, P., “Size effect on the critical stress of Nitinol
wires,” ASME Conf. Smart Mater. Adapt. Struct. Intell. Syst., 1–5, Snowbird, UT, Sep 16-18 (2013).
[16] Brinson, L. C., “One-dimensional constitutive behavior of shape memory alloys: thermomechanical derivation
with non-constant material functions and redefined martensite internal variable,” J. Intell. Mater. Syst. Struct.
4(2), 229–242 (1993).
[17] Crews, J. H.., Buckner, G. D., “Design optimization of a shape memory alloy-actuated robotic catheter,” J. Intell.
Mater. Syst. Struct. 23(5), 545–562 (2012).
[18] Ozbulut, O. E., Roschke, P. N., Lin, P. Y.., Loh, C. H., “GA-based optimum design of a shape memory alloy
device for seismic response mitigation,” J. Smart Mater. Struct. 19(6), 065004 (2010).
Related Documents