Comprehensive Kernel Instrumentation via Dynamic Binary Translation Peter Feiner, Angela Demke Brown, Ashvin Goel University of Toronto Presenter: Chuong Ngo

Comprehensive Kernel Instrumentation via Dynamic Binary Translation
Jan 01, 2016
Comprehensive Kernel Instrumentation via Dynamic Binary Translation. Presenter: Chuong Ngo. Peter Feiner , Angela Demke Brown, Ashvin Goel University of Toronto. No parents, uncles, or girlfriends were killed during the creation of this presentation. - PowerPoint PPT Presentation
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Comprehensive Kernel Instrumentation via Dynamic Binary
Translation
Peter Feiner, Angela Demke Brown, Ashvin Goel
University of Toronto
Presenter: Chuong Ngo
THE ORIGIN STORY STARTING IN MEDIAS RES
No parents, uncles, or girlfriends were killed during the creation of this presentation

DBT is the Answer!Emulation of one
instruction set by another through translation of binary code during execution.
More practical than static binary translation.◦ Simplifies identification of
executable code.◦ Amortization of translation
overhead costs over time.
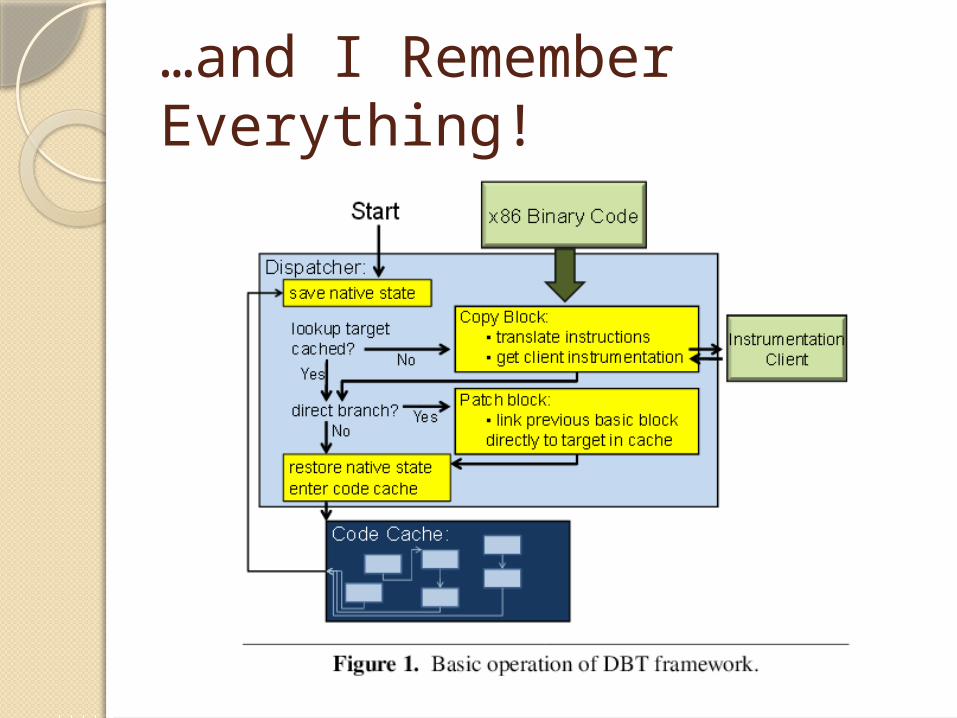
…and I Remember Everything!

The Answer to What?Ports
◦AbandonwareAnalysisBug findingSecurity
Assemble!
User Level
JIFLPinOS
PinDynamoRioValgrind
Power Level < 9K

IT’S A BIRD! IT’S A PLANE! IT’S DRK!
All the way from Earth-1610 via Cataclysm

But Who Hides Behind the Mask?4 Goals for kernel DBT
framework:◦Full coverage of kernel code.◦No direct overhead for user level
code.◦Preserve original concurrency and
execution interleaving.◦Be transparent.
DynamoRio for the kernel.

DynamoRio Flashback!Code cacheCTIs return control to dispatcherDirect branching patchesNext Executing TailClient callbacks

Well Victor…I’ve been thinking.
All kernel entry points point to dispatcher.◦Shadow descriptor table
Self-contained dispatcher◦Custom heap allocator◦“Pull” I/O model
CPU-private dataInterrupts delayed in code
cache, disabled in dispatcher.Exceptions use restored native
states.

A Carbonadium Skeleton

DRK Initialization
Individual CPU initialization◦ Allocate CPU resources◦ All kernel entry points to dispatcher◦ All interrupts redirected
Allocates memory for heap◦ Checks all processors
for successful memory mapping.
◦ Must be within 2GB of text and data segments.

DRK Normal Operations
Determine target of control transfer instruction and dispatch.
Kernel exit points executed via native instructions.
Dispatcher creates and caches code fragment.Context switches to the code fragment.
You Can’t Escape This Timeline!Exceptions run native
◦Native state must be restored.Interrupts are delayed and emulated.
◦Other interrupts are disabled.◦Captured interrupt executed between block
dispatches.
HOW DOES IT STACK UP?
How did--? This… you… What are you?
I’ve always found hardware to be more reliableTest System: Dell Optiplex 980
◦8 GB RAM◦4x Intel Core i7s at 2.8 GHz, no
hyperthreading2 Clients:
◦Null Client◦Instruction Count
Filebench

I’m the best at what I do?
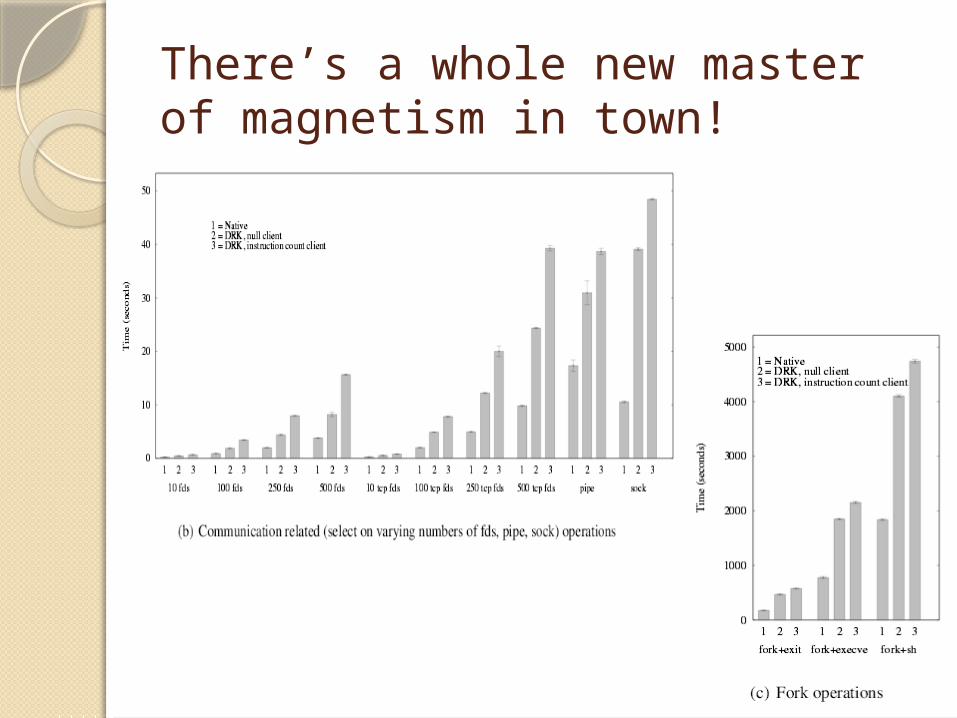
There’s a whole new master of magnetism in town!

I know everything. I can’t help it.

With great power…4 Goals for kernel DBT
framework:◦Full coverage of kernel code.◦No direct overhead for user level
code.◦Preserve original concurrency and
execution interleaving.◦Be transparent.
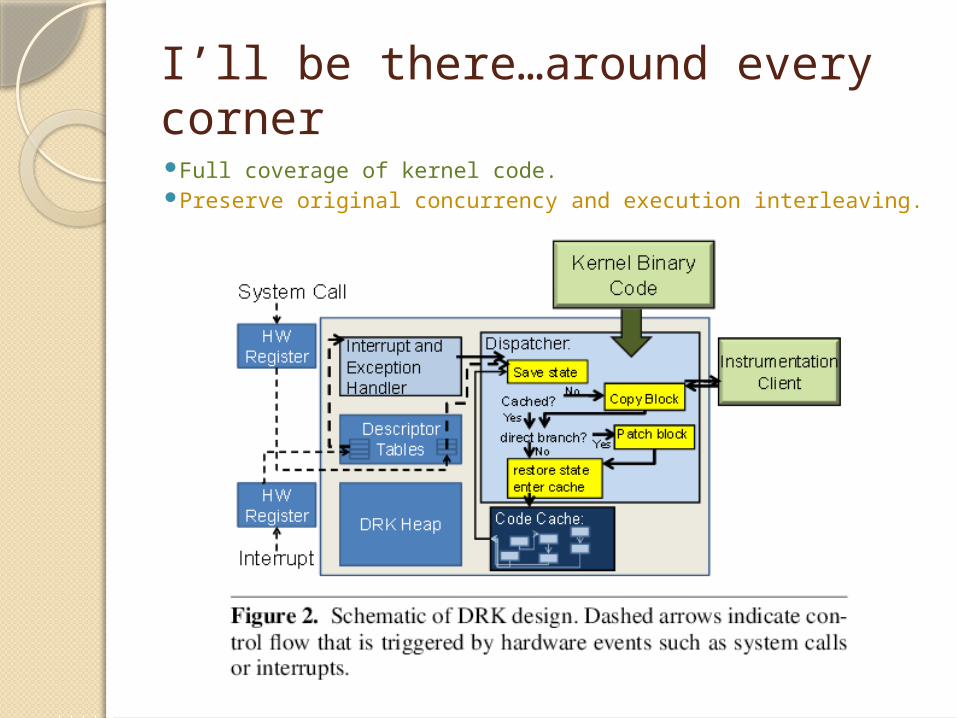
I’ll be there…around every corner Full coverage of kernel code. Preserve original concurrency and execution interleaving.

Fastest man alive with a limpNo direct overhead for user level
code.◦Increased cache and TLB misses.

The cosmic rays…what did they do to us?Be transparent.
◦ No code cache consistency.◦ Shadow descriptor tables
readable via hardware registers.◦ Page table inconsistencies.◦ CPU-private data.
…comes great responsibility.4 Goals for kernel DBT
framework:◦Full coverage of kernel code.◦No direct overhead for user level
code.◦Preserve original concurrency and
execution interleaving.◦Be transparent.

DRK APPLICATIONSThis was the world that I had created.

DRK’s Shadow MemoryStoring metadata about memory
used.Ported UMBRA.
◦Simple indirect mapping.◦Copy-on-write.◦10x overhead vs. native.
KAddrcheckMemory addressability checking
tool.Scans slab allocator’s data
structures to locate all pages and freelists.◦Triggers shadow memory allocations.
Addressability checks run on every memory access.
Stackcheck
◦ Checks for addressability errors.◦ Kills calling thread and continues.
Modified KAddrcheckResolves overflow without system
crash.
Stack overflow guard

Triumph!DRK is a kernel-level DBT.DynamoRIO “port”.Heavy implementation.Missing a number of features.

Related Documents