Comparison of mixed and isoparametric boundary elements in time domain poroelasticity Dobromil Pryl a , Martin Schanz b, * a Institute of Applied Mechanics, Technical University Braunschweig, Spielmannstr. 11, D-38106 Braunschweig, Germany b Institute of Applied Mechanics, Graz University of Technology, Technikerstr. 4, A-8010 Graz, Austria Received 12 May 2005; received in revised form 15 September 2005; accepted 25 September 2005 Available online 2 February 2006 Abstract A poroelastodynamic Boundary Element (BE) formulation in time domain based on the Convolution Quadrature Method (CQM) is used to model wave propagation phenomena. In the conventional BEM implementation, the same shape functions are applied to all state variables. Motivated by the improvements due to mixed elements in FEM, i.e. the shape function for the pore pressure is chosen one degree lower than for the displacement, such elements have been added to the BEM implementation in both two dimensional (2-d) and three dimensional (3-d) formulations. A study about the influence of the mixed shape functions to the quality of numerical results and the stability of the time-stepping scheme is presented. The mixed elements increase the numerical cost significantly and the results are inconclusive as to whether they improve the CQM based BEM. Therefore, they are only recommended for special cases, in particular the incompressible model in 2-d, where they tend to a significant reduction of the lower stability limit. q 2005 Elsevier Ltd. All rights reserved. Keywords: Poroelasticity; Mixed elements; Convolution quadrature method; Wave propagation; Time-dependent boundary elements 1. Introduction The efficiency of the BEM for dealing with problems involving semi-infinite domains, e.g. soil–structure interaction, has long been recognized by researchers and engineers. For soil, a fluid saturated material, a poroelastic constitutive model must be used in connection with a time-dependent BE formulation to model wave propagation problems correctly. Dynamic poroelastic BE publications has been formulated in the frequency domain [2], in the Laplace domain [3], and in the time domain [4,5]. The time-dependent BE formulation based on the Convolution Quadrature Method is used here to solve problems of wave propagation [5,1]. In previous formulations, only isoparametric elements, employing identical shape functions for all variables and the geometry, have been used in poroelastic BE formulations. The so- called mixed elements, implemented in this article, combine two different shape functions: one for pressure and flux (e.g. constant) and another one for the displacements and tractions (e.g. linear). This approach is common in finite elements and improves upon the isoparametric element results in many applications. In some cases, e.g. incompressible elasticity or when the undrained material properties play a significant role in poroelasticity, mixed elements are required to fulfil the Babus ˇka–Brezzi stability condition [6]. Contrary to FEM, for boundary elements, only one publication regarding mixed elements is known to the authors [7]. In the publication, theoretical results of the convergence are given (for a different problem, i.e. not for poroelasticity) and verified against a numerical example using the Laplace operator. In Section 1, Biot’s theory is introduced. The boundary integral equation based on it is derived in Section 2. In Section 3, the Boundary Element formulation based on the Convolution Quadrature Method is briefly presented. The various element types are described in Section 4. In Section 5, two-dimensional (2-d) and three-dimensional (3-d) BEM results are compared to a one-dimensional (1-d) analytical solution for a poroelastic column. Numerical examples that compare the isoparametric and mixed elements can be found in Section 6. 2. Biot’s poroelasticity Following Biot’s approach to model the behavior of porous media, one possible representation of the poroelastic constitu- tive equations is obtained using the total stress s ij Z s s ij C s f d ij Engineering Analysis with Boundary Elements 30 (2006) 254–269 www.elsevier.com/locate/enganabound 0955-7997/$ - see front matter q 2005 Elsevier Ltd. All rights reserved. doi:10.1016/j.enganabound.2005.09.006 * Corresponding author. Tel.: C43 316 8737600; fax: C43 316 8737641. E-mail addresses: [email protected] (D. Pryl), [email protected] (M. Schanz).

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Comparison of mixed and isoparametric boundary elements
in time domain poroelasticity
Dobromil Pryl a, Martin Schanz b,*
a Institute of Applied Mechanics, Technical University Braunschweig, Spielmannstr. 11, D-38106 Braunschweig, Germanyb Institute of Applied Mechanics, Graz University of Technology, Technikerstr. 4, A-8010 Graz, Austria
Received 12 May 2005; received in revised form 15 September 2005; accepted 25 September 2005
Available online 2 February 2006
Abstract
A poroelastodynamic Boundary Element (BE) formulation in time domain based on the Convolution Quadrature Method (CQM) is used to
model wave propagation phenomena. In the conventional BEM implementation, the same shape functions are applied to all state variables.
Motivated by the improvements due to mixed elements in FEM, i.e. the shape function for the pore pressure is chosen one degree lower than for
the displacement, such elements have been added to the BEM implementation in both two dimensional (2-d) and three dimensional (3-d)
formulations. A study about the influence of the mixed shape functions to the quality of numerical results and the stability of the time-stepping
scheme is presented. The mixed elements increase the numerical cost significantly and the results are inconclusive as to whether they improve the
CQM based BEM. Therefore, they are only recommended for special cases, in particular the incompressible model in 2-d, where they tend to a
significant reduction of the lower stability limit.
q 2005 Elsevier Ltd. All rights reserved.
Keywords: Poroelasticity; Mixed elements; Convolution quadrature method; Wave propagation; Time-dependent boundary elements
1. Introduction
The efficiency of the BEM for dealing with problems
involving semi-infinite domains, e.g. soil–structure interaction,
has long been recognized by researchers and engineers. For
soil, a fluid saturated material, a poroelastic constitutive model
must be used in connection with a time-dependent BE
formulation to model wave propagation problems correctly.
Dynamic poroelastic BE publications has been formulated in
the frequency domain [2], in the Laplace domain [3], and in the
time domain [4,5]. The time-dependent BE formulation based
on the Convolution Quadrature Method is used here to solve
problems of wave propagation [5,1].
In previous formulations, only isoparametric elements,
employing identical shape functions for all variables and the
geometry, havebeenused in poroelasticBE formulations. The so-
called mixed elements, implemented in this article, combine two
different shape functions: one for pressure and flux (e.g. constant)
and another one for the displacements and tractions (e.g. linear).
0955-7997/$ - see front matter q 2005 Elsevier Ltd. All rights reserved.
doi:10.1016/j.enganabound.2005.09.006
* Corresponding author. Tel.: C43 316 8737600; fax: C43 316 8737641.
E-mail addresses: [email protected] (D. Pryl), [email protected]
(M. Schanz).
This approach is common in finite elements and improves upon
the isoparametric element results in many applications. In some
cases, e.g. incompressible elasticity or when the undrained
material properties play a significant role in poroelasticity, mixed
elements are required to fulfil the Babuska–Brezzi stability
condition [6]. Contrary to FEM, for boundary elements, only one
publication regardingmixed elements is known to the authors [7].
In the publication, theoretical results of the convergence are given
(for a different problem, i.e. not for poroelasticity) and verified
against a numerical example using the Laplace operator.
In Section 1, Biot’s theory is introduced. The boundary
integral equation based on it is derived in Section 2. In Section
3, the Boundary Element formulation based on the Convolution
Quadrature Method is briefly presented. The various element
types are described in Section 4. In Section 5, two-dimensional
(2-d) and three-dimensional (3-d) BEM results are compared to
a one-dimensional (1-d) analytical solution for a poroelastic
column. Numerical examples that compare the isoparametric
and mixed elements can be found in Section 6.
2. Biot’s poroelasticity
Following Biot’s approach to model the behavior of porous
media, one possible representation of the poroelastic constitu-
tive equations is obtained using the total stress sijZssijCsfdij
Engineering Analysis with Boundary Elements 30 (2006) 254–269
www.elsevier.com/locate/enganabound

D. Pryl, M. Schanz / Engineering Analysis with Boundary Elements 30 (2006) 254–269 255
and the pore pressure p as independent variables [8].
Introducing Biot’s effective stress coefficient a and the solid
displacement ui the constitutive equation reads
sij ZGðui;j Cuj;iÞC KK2
3G
� �ukkdijKadijp; (1)
where G and K are the shear modulus and the compression
modulus of the solid frame, respectively. Throughout this
paper, Latin indices receive the values 1,2, and 1–3 in 2-d and
3-d, respectively, and the summation convention is applied
over repeated indices. Commas (),i denote spatial derivatives
and dij is the Kronecker delta.
In addition to the total stress sij, the variation of fluid
volume per unit reference volume z is introduced, forming the
second constitutive equation
zZauk;k Cf2
Rp; (2)
with the porosity f and a material constant R. In (1) and (2), a
linear theory is used, i.e. small deformation gradients are
assumed. The variation of fluid z in (2) is defined by the mass
balance over a reference volume, i.e. by the continuity equation
vz
vtCqi;i Z a; (3)
with the specific flux qiZf(vvi/vt), the relative fluid to solid
displacement ni, and a source term a(t).
Additional to the fluid balance (3), the balance of
momentum for the bulk material must be fulfilled. This
dynamic equilibrium is given by
sij;j CFi Z rv2ui
vt2Cfrf
v2vi
vt2; (4)
with the bulk body force per unit volume Fi and the bulk
density rZrsð1KfÞCfrf . The density of the solid and the
fluid is denoted by rs and rf, respectively.
Next, the fluid transport in the interstitial space expressed by
the specific flux qi is modeled with a generalized Darcy’s law
qi ZKk p;i Crfv2ui
vt2C
ra Cfrf
f
v2vi
vt2
� �; (5)
where k denotes the permeability. In Eq. (5), an additional
density the apparent mass density ra is introduced by Biot [9]
to describe the dynamic interaction between fluid and skeleton.
It can be written as raZCfrf where C is a factor depending on
the geometry of the pores and the frequency of excitation. At
low frequency, Bonnet and Auriault [10] measured CZ0.66 for
a sphere assembly of glass beads. In higher frequency ranges, a
certain functional dependence of C on frequency has been
proposed based on conceptual porosity structures, e.g. by Biot
[11] and Bonnet [10]. In the following CZ0.66 is assumed.
To formulate the equation of motion, the above balance laws
and constitutive equations have to be combined. In order to do
this, the degrees of freedom must first be determined. There are
several possibilities: (i) to use the solid displacements ui and the
fluid displacements ni (two vectors, i.e. six unknowns in 3-d) or
(ii) a combination of the solid displacements ui and the pore
pressure p (one vector and one scalar, i.e. four unknowns in 3-d).
As shown in [12], it is sufficient to use the latter choice, i.e. the
solid displacements ui and the pore pressure p will become basic
variables to describe a poroelastic continuum. Therefore, the
above equations are reduced to these unknowns. First, Darcy’s
law (5) is rearranged to obtain ni. Since ni is given as second time
derivative in (5), this is only possible in Laplace domain. The
Laplace transformation is defined by
Lff ðtÞgZ f ðsÞZ
ðN0
f ðtÞeKst dt (6)
with the complex Laplace variable s for all f(t!0)Z0. After
transformation to Laplace domain, the relative fluid to solid
displacement is
vi ZKkrff
2s2
f2sCs2kðra Cfrf Þ|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}b
1
s2frf
�p;i Cs2rf ui
�: (7)
In Eq. (7), the abbreviation b is defined for further usage.
Moreover, vanishing initial conditions for ui and vi are assumed
here and in the following. Now, the final set of differential
equations for the displacement ui and the pore pressure p is
obtained by inserting the constitutive Eqs. (1) and (2) in the
Laplace transformed dynamic equilibrium (4) and continuity Eq.
(3) with vi from Eq. (7). This leads to
Gui;jjC KC1
3G
� �uj;ijKðaKbÞp;iKs2ðrKbrfÞui ZKFi
(8)
b
srfp;iiK
f2s
RpKðaKbÞsui;i ZKa; (9)
or in operator notation
Buj
p
" #ZK
Fi
a
" #
BZ
ðGV2Ks2ðrKbrfÞÞdijC KC1
3G
0@
1Avivj KðaKbÞvi
KsðaKbÞvjb
srfV2K
f2s
R
2666664
3777775
(10)
with the non-self-adjoint operator B. This set of equations
describes the behavior of a poroelastic continuum completely.
However, an analytical representation in time domain is only
possible for k/N. This case would represent a negligible
friction between solid and interstitial fluid.
2.1. Incompressible constituents
In a two-phasematerial not only each constituent, the solid and
the fluid, may be compressible on a microscopic level, but also

D. Pryl, M. Schanz / Engineering Analysis with Boundary Elements 30 (2006) 254–269256
the skeleton itself possesses a structural compressibility. If the
compression modulus of one constituent is much larger on the
micro-scale than the compression modulus of the bulk material,
this constituent is assumed to be materially incompressible. A
common example for a materially incompressible solid constitu-
ent is soil. In this case, the individual grains are much stiffer than
the skeleton itself. The respective conditions for such incompres-
sibilities are [13]
K
Ks/1 incompressible solid;
K
Kf/1 incompressible fluid;
(11)
whereKs denotes the compressionmodulus of the solid grains and
Kf the compression modulus of the fluid. With these conditions it
is obvious that there are three possible cases: (i) only the solid is
incompressible, (ii) only the fluid is incompressible, or (iii) the
combination of both.
If only one of the constituents is assumed incompressible,
i.e. in cases (i) and (ii), the governing equations remain the
same as with both constituents modeled compressible. In these
cases, just the material parameters in the compressible model
have to be changed. Therefore, in the following, only the model
with both constituents incompressible, i.e. case (iii), has to be
studied separately. The application of both conditions (11)
leads to aZ1 and R/N, and subsequently the equation
system changes. Nevertheless, the same BE formulation as
sketched in the following can be used with different
fundamental solutions. More details about the incompressible
poroelastic models can be found, e.g. in [14].
3. Boundary integral equation
The boundary integral equation for dynamic poroelasticity
in Laplace domain can be obtained using either the
corresponding reciprocal work theorem [2] or the weighted
residuals formulation [15]. Here, the weighted residuals
approach will be sketched briefly.
The poroelastodynamic integral equation can be derived
directly by equating the inner product of (8) and (9), written in
matrix form with operator matrix B defined in (10), and the
matrix of the fundamental solutions G to a null vector, i.e.
ðU
GTBuj
p
" #dUZ 0 with GZ
Usij U
fi
Psj P
f
24
35; (12)
where the integration is performed over a domain U with
boundary G and vanishing body forces Fi and sources a are
assumed. By this inner product, essentially, the error in satisfying
the governing differential Eqs. (8) and (9) is forced to be
orthogonal toG. The upper indices ()s and ()f indicate the impulse
response function due to a single force FZdðxKyÞ and a single
source aZdðxKyÞ, respectively. According to the theory of
Green’s formula and using partial integration the operator B is
transformed from acting on the vector of unknowns ½uip�T to the
matrix of fundamental solutions G. This yields the following
system of integral equations given in matrix notation asðG
Usij KP
sj
Ufi KP
f
" #ti
q
" #dGK
ðG
Tsij Q
sj
Tfi Q
f
" #ui
p
" #dGZ
uj
p
" #:
(13)
In (13), the traction vector tiZ sijnj and the normal flux qZKðb=srfÞðp;iCrfs
2uiÞni are introduced, and the abbreviations
Tsij Z KK
2
3G
� �U
skj;k CasP
sj
� �di[ CG
�U
sij;[ C U
s[j;i
�� n[
(14a)
Qsj Z
b
srf½P
sj;iKrfsU
sji�ni (14b)
Tfi Z KK
2
3G
� �U
fk;k CasP
f
� �di[ CG
�U
fi;[ C U
f[;i
�� n[
(14c)
QfZ b=srf
hPf;jKrfsU
fj
inj (14d)
are used, where (14a) and (14b) can be interpreted as being the
adjoint term to the traction vector ti and the flux q, respectively.
A series expansion of the fundamental solutions as given in
[14] with respect to rZ(yKx) shows that the fundamental
solutions in Eq. (13) are either regular, Psj and U
fi , weakly
singular, Usij,P
f, T
fi , and Q
sj , or strongly singular, T
sij and Q
f. In
the limit r/0, the strongly singular parts in the kernel
functions Tsij and Q
fare equal to their elastostatic and acoustic
counterparts, respectively. Therefore, shifting the point y to the
boundary G in (13) results in the boundary integral equation
ðG
Usij KP
sj
Ufi KP
f
" #ti
q
" #dG
Z
ðG
CTsij Q
sj
Tfi Q
f
" #ui
p
" #dGC
cij 0
0 c
" #ui
p
" #(15)
with the integral free terms cij and c known from elastostatics
and acoustics, respectively, and with the Cauchy principal
value integral Ec. A transformation to time domain gives,
finally, the time dependent integral equation for poroelasticity
ðt0
ðG
UsijðtKt; y; xÞ KPs
j ðtKt; y; xÞ
Ufi ðtKt; y; xÞ KPfðtKt; y; xÞ
" #tiðt; xÞ
qðt; xÞ
" #dG dt
Z
ðt0
ðG
CT sijðtKt; y; xÞ Qs
j ðtKt; y; xÞ
T fi ðtKt; y; xÞ QfðtKt; y; xÞ
" #uiðt; xÞ
pðt; xÞ
" #dG dt
Ccij 0
0 c
" #uiðt; yÞ
pðt; yÞ
" #:
(16)

D. Pryl, M. Schanz / Engineering Analysis with Boundary Elements 30 (2006) 254–269 257
4. Boundary element formulation
According to the boundary element method the boundary
surface G is discretized by E elements Ge and for the state
variables F polynomial shape functions NfeðxÞ are defined.
Further, the convolution integrals are approximated by the
Convolution Quadrature Method proposed by Lubich [16] (nZ0,1.,N)ðt0
f ðtKtÞgðtÞdtzXnkZ0
unKk
�f ;Dt
�gðkDtÞ; (17)
with the integration weights
un
�f ;Dt
�Z
RKn
L
XLK1
[Z0
fg�Rei[ð2p=LÞ
�Dt
0@
1AeKin[ð2p=LÞ: (18)
In (17), the time t is discretized in N time steps of equal
duration Dt, and g denotes the quotient of characteristic
polynomials of the underlying multi-step method. A backward
differential formula of order 2 and the parameter choice LZN
and RNZffiffiffiffiffiffiffiffiffiffiffi10K10
pis recommended in [17,18]. Numerical
experiments have shown that also RNZffiffiffiffiffiffiffiffiffi10K5
pworks, and in
some cases it yields (marginally) better results than
RNZffiffiffiffiffiffiffiffiffiffiffi10K10
p. However, all the differences observed for R
between RNZffiffiffiffiffiffiffiffiffiffiffi10K10
pand RNZ
ffiffiffiffiffiffiffiffiffi10K5
pare very small.
Applying these approximations to the integral equation (16)
results in the boundary element time stepping formulation for
nZ0,1,.,N
cij uiðnDtÞ
c p ðnDtÞ
" #Z
XE;Fe;fZ1
XnkZ0
uefnKkðU
sij;
uNef ;DtÞ Ku
efnKkðP
sj ;
pNef ;DtÞ
uefnKkðU
fi ;
uNef ;DtÞ Ku
efnKkðP
f; qNe
f ;DtÞ
24
35 t
efi ðkDtÞ
qef ðkDtÞ
" #8<:
KuefnKkðT
sij;
tNef ;DtÞ u
efnKkðQ
sj ;
qNef ;DtÞ
uefnKkðT
fi ;
tNef ;DtÞ u
efnKkðQ
f; qNe
f ;DtÞ
24
35 u
efi ðkDtÞ
pef ðkDtÞ
" #9=;:
(19)
The integration weights are calculated corresponding to
(18), e.g. for the displacement fundamental solution
uefn ðU
sij;
u Nef ;DtÞ
ZRKn
L
XLK1
[Z0
ðG
Usij x; y;
gðRei[ð2p=LÞÞ
Dt
0@
1AuNf
eðxÞdGeKin[ð2p=LÞ:
(20)
Note, the calculation of the integration weights is only based
on the Laplace transformed fundamental solutions which are
available for the compressible and incompressible model [14].
In order to arrive at a system of algebraic equations, point
collocation is used and a direct equation solver is applied. The
element nodes are used as collocation points, whereas for the
mixed elements, which will be introduced in the next section,
also the mid-node is a collocation point. Details of the above
given time stepping method may be found in [1,5].
4.1. Dimensionless variables
An aspect in the numerical implementation is the choice of
dimensionless variables. The easiest choice is to normalize
the variables on the total time tmax, on the largest distance in the
mesh rmax, and on a material constant like the Young’s
modulus E. This has been implemented and results in
xi Zxirmax
~tZt
tmax
~EZ 1 ~RZR
E
~pZr2max
t2maxEp ~pf Z
r2max
t2maxEpf ~kZ
tmaxE
r2max
k:
(21)
Another, more complicated way, is to normalize all material
data as suggested byChen andDargush in [4]. Both these choices
and a few other have been implemented and compared by
Kielhorn [19]. The comparison is mainly based on the condition
numbers of the system matrices for several different geometries,
material data, and discretizations. In most cases the choice (21),
marked ‘Fall 7 (Variante 4)’ in the work [19], yields the best
results. There are, however, a few combinationswhere the choice
ofChen andDargush is superior. It should also be remarked that a
calculation without dimensionless variables is mostly not
possible at all, i.e. the inversion of the matrix of the first time
step fails. In the numerical examples in this article, the suggestion
of Kielhorn (21) is used unless stated otherwise.
5. Element types and shape functions
During the spatial discretization, four possibly different
shape functions uNfe,
tNfe,
pNfe, and
qNfe need to be chosen to
approximate the state variables on the discretized boundary
using the nodal values in (19). The approximation formulas for
the displacements ui and the pore pressure p, based on the nodal
values uefi ðtÞ, pef(t) at the node f of element e and the
corresponding shape functions, are
uiðx; tÞZXEeZ1
XFfZ1
uNfeðxÞu
efi ðtÞ;
pðx; tÞZXEeZ1
XFfZ1
pNfeðxÞp
ef ðtÞ:
(22)
The tractions ti and flux q are handled in the same way. The
simplest choice are isoparametric elements, i.e. taking identical
shape functions for all quantities and the geometry. Another
option, common in finite elements for poroelasticity [6], is to
choose the shape function for p and q one degree lower than for
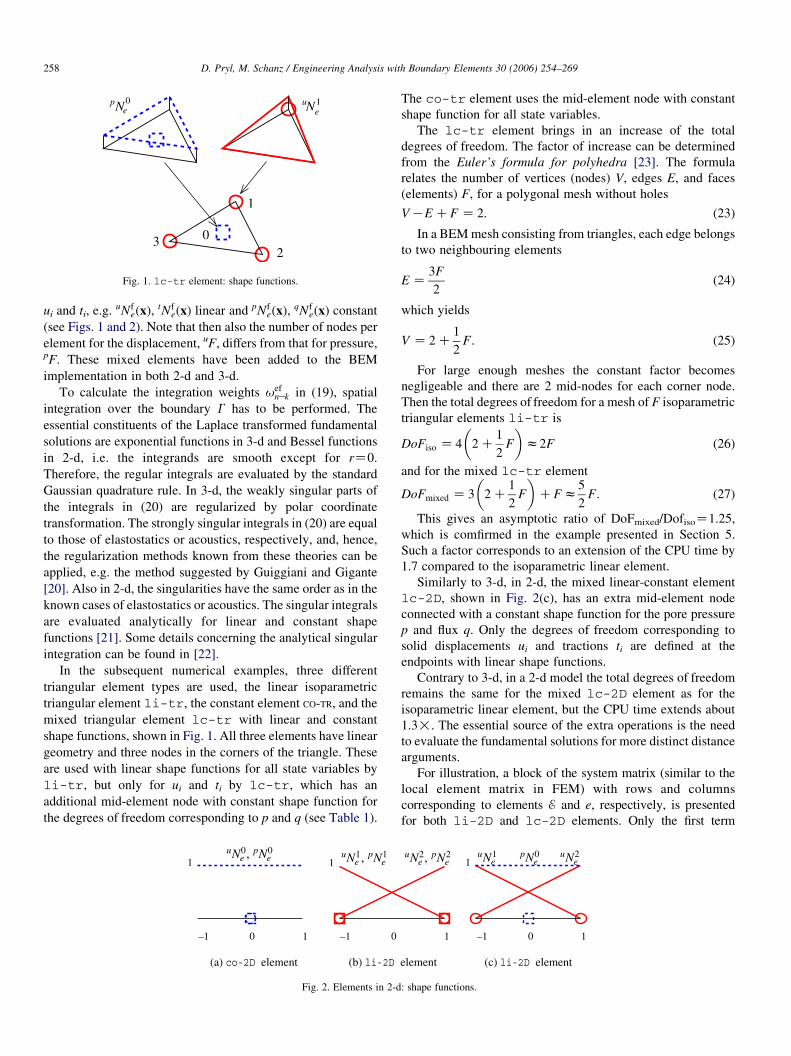
Fig. 1. lc-tr element: shape functions.
D. Pryl, M. Schanz / Engineering Analysis with Boundary Elements 30 (2006) 254–269258
ui and ti, e.g.uNf
eðxÞ,tNf
eðxÞ linear andpNf
eðxÞ,qNf
eðxÞ constant
(see Figs. 1 and 2). Note that then also the number of nodes per
element for the displacement, uF, differs from that for pressure,pF. These mixed elements have been added to the BEM
implementation in both 2-d and 3-d.
To calculate the integration weights uefnKk in (19), spatial
integration over the boundary G has to be performed. The
essential constituents of the Laplace transformed fundamental
solutions are exponential functions in 3-d and Bessel functions
in 2-d, i.e. the integrands are smooth except for rZ0.
Therefore, the regular integrals are evaluated by the standard
Gaussian quadrature rule. In 3-d, the weakly singular parts of
the integrals in (20) are regularized by polar coordinate
transformation. The strongly singular integrals in (20) are equal
to those of elastostatics or acoustics, respectively, and, hence,
the regularization methods known from these theories can be
applied, e.g. the method suggested by Guiggiani and Gigante
[20]. Also in 2-d, the singularities have the same order as in the
known cases of elastostatics or acoustics. The singular integrals
are evaluated analytically for linear and constant shape
functions [21]. Some details concerning the analytical singular
integration can be found in [22].
In the subsequent numerical examples, three different
triangular element types are used, the linear isoparametric
triangular element li-tr, the constant element CO-TR, and the
mixed triangular element lc-tr with linear and constant
shape functions, shown in Fig. 1. All three elements have linear
geometry and three nodes in the corners of the triangle. These
are used with linear shape functions for all state variables by
li-tr, but only for ui and ti by lc-tr, which has an
additional mid-element node with constant shape function for
the degrees of freedom corresponding to p and q (see Table 1).
Fig. 2. Elements in 2-d
The co-tr element uses the mid-element node with constant
shape function for all state variables.
The lc-tr element brings in an increase of the total
degrees of freedom. The factor of increase can be determined
from the Euler’s formula for polyhedra [23]. The formula
relates the number of vertices (nodes) V, edges E, and faces
(elements) F, for a polygonal mesh without holes
VKECF Z 2: (23)
In a BEMmesh consisting from triangles, each edge belongs
to two neighbouring elements
EZ3F
2(24)
which yields
V Z 2C1
2F: (25)
For large enough meshes the constant factor becomes
negligeable and there are 2 mid-nodes for each corner node.
Then the total degrees of freedom for a mesh of F isoparametric
triangular elements li-tr is
DoFiso Z 4 2C1
2F
� �z2F (26)
and for the mixed lc-tr element
DoFmixed Z 3 2C1
2F
� �CFz
5
2F: (27)
This gives an asymptotic ratio of DoFmixed/DofisoZ1.25,
which is comfirmed in the example presented in Section 5.
Such a factor corresponds to an extension of the CPU time by
1.7 compared to the isoparametric linear element.
Similarly to 3-d, in 2-d, the mixed linear-constant element
lc-2D, shown in Fig. 2(c), has an extra mid-element node
connected with a constant shape function for the pore pressure
p and flux q. Only the degrees of freedom corresponding to
solid displacements ui and tractions ti are defined at the
endpoints with linear shape functions.
Contrary to 3-d, in a 2-d model the total degrees of freedom
remains the same for the mixed lc-2D element as for the
isoparametric linear element, but the CPU time extends about
1.3!. The essential source of the extra operations is the need
to evaluate the fundamental solutions for more distinct distance
arguments.
For illustration, a block of the system matrix (similar to the
local element matrix in FEM) with rows and columns
corresponding to elements E and e, respectively, is presented
for both li-2D and lc-2D elements. Only the first term
: shape functions.

Table 1
Element types
Element uNfe,
tNfe;
pNfe,
qNfe;
li-2D, li-tr Linear Linear
lc-2D, LC-TR Linear Constant
D. Pryl, M. Schanz / Engineering Analysis with Boundary Elements 30 (2006) 254–269 259
(i.e. with U, P and t, q) on the right hand side in Eq. (19) is
included as example, as the other one (with T, Q and u, p) is
analogical. Note that depending on the boundary condition
corresponding to each degree of freedom (row in the block), uiresp. p is given and ti resp. q unknown or vice versa. The given
term contributes to the right hand side and the unknown one to the
system matrix. The block is in the case of the li-2D element
ue1nKkðU
sijðy
E1Þ; uN1eÞ Kue1
nKkðPsj ðy
E1Þ; pN1eÞ ue1
nKkðUsijðy
E1Þ; uN2eÞ Kue1
nKkðPsj ðy
E1Þ; pN2eÞ
ue1nKkðU
fi ðy
E1Þ; uN1eÞ Kue1
nKkðPfðyE1Þ; pN1
eÞ ue1nKkðU
fi ðy
E1Þ; uN2eÞ Kue1
nKkðPfðyE1Þ; pN2
eÞ
ue2nKkðU
sijðy
E2Þ; uN1eÞ Kue2
nKkðPsj ðy
E2Þ; pN1eÞ ue2
nKkðUsijðy
E2Þ; uN2eÞ Kue2
nKkðPsj ðy
E2Þ; pN2eÞ
ue2nKkðU
fi ðy
E2Þ; uN1eÞ Kue2
nKkðPfðyE2Þ; pN1
eÞ ue2nKkðU
fi ðy
E2Þ; uN2eÞ Kue2
nKkðPfðyE2Þ; pN2
eÞ
26666664
37777775
te1i
qe1
te2i
qe2
2666664
3777775 (28)
and for the lc-2D element
ue1nKkðU
sijðy
E1Þ; uN1eÞ ue1
nKkðUsijðy
E1Þ; uN2eÞ Kue1
nKkðPsj ðy
E1Þ; pN0eÞ
ue2nKkðU
sijðy
E2Þ; uN1eÞ ue2
nKkðUsijðy
E2Þ; uN2eÞ Kue2
nKkðPsj ðy
E2Þ; pN0eÞ
ue0nKkðU
fi ðy
E0Þ; uN1eÞ ue0
nKkðUfi ðy
E0Þ; uN2eÞ Kue0
nKkðPfðyE0Þ; pN0
eÞ
2664
3775
te1i
te2i
qe0
2664
3775 (29)
where yEf is the position of the fth node of element E and tefi , qef
are the nodal values at the fth node of element e. The Dt and kDtarguments are omitted for space reasons aswell as the x argument
of the fundamental solutions, which runs through the element e
when computing the integral for uefnKk in Eq. (20).
The dimension of the local matrix for the isoparametric
element in (28) is 2!ð2C1ÞZ6 (two nodes, each with one
unknown vector ti (2 DoFs) and one unknown scalar q (1 DoF))
and for the mixed in (29) it is 2!2C1Z5 (two end-nodes,
each with one unknown vector ti (2 DoFs) and one mid-node
with one unknown scalar q (1 DoF)). The difference in the local
matrix size is not directly connected to a difference in the
global number of degrees of freedom, as the values at endpoints
(or triangle corners in 3-d) are shared with the neighboring
element(s) and those at the mid-element nodes are not. The size
of the global matrix can be determined using the Euler’s
formula for polyhedra (23).
Table 2
Material data for soil
K,G[N/m2] [varrho], [varrho]f[kg/m3]
f
2.1!108, 9.8!107 1884, 1000 0.48
6. Comparison of the mixed elements to a 1-d analytical
solution
To validate the BEM program, a study comparing the BEM
results to the 1-d analytical solution has been done for the
compressible and incompressible models. The time response of
the analytical solution has been obtained with the CQM, i.e. for
both the BEM and the analytical solutions, the same time
approximation is used. The material constants for the water
saturated coarse sand, i.e. a soil, are given in Table 2. For this
comparison, the Poisson’s ratio of the solid frame n is set to 0
resulting in different Young’s and shear moduli KZ8.5!107
and GZ1.3!108, respectively. Note that this only disables the
lateral contraction for the long-time (drained) material
behavior. For the short-time response (undrained), nus0 and
lateral contraction still plays a role.
For the geometry simulating the 1-d column in 2-d and 3-d,
see Figs. 3 and 4. The column is 3 m high, 1 m wide, and, in 3-
d, 1 m deep. On the top, it is excited by a traction jump
according to a unit step function ty(x,t)Z1 N/m2 H(t). The top
surface with load is permeable and all the remaining surfaces,
i.e. the sides and the vertically supported bottom, are
impermeable. On the sides, only sliding along the surface is
allowed, and movements in the perpendicular direction are
blocked.
In 2-d, the BEM model of the column described above
consists of 32 nodes and 32 elements, as shown in Fig. 3. A
finer discretization has 128 nodes and 128 elements. It will be
shown that the problem can be solved with the BEM
implementation.
In 3-d, the BEM model of the column described above
consists of 252 linear triangular elements on 128 nodes (see
Fig. 4(b)). The finer mesh in Fig. 4(c) has 700 elements and 352
R[N/m2] a k[m4/Ns]
1.2!109 0.981 3.55!10-9

Fig. 3. Comparison to 1-d analytical solution: 2-d geometry and discretization.
D. Pryl, M. Schanz / Engineering Analysis with Boundary Elements 30 (2006) 254–269260
nodes. As in 2-d, the tests have shown that the results converge
to the analytical solution. However, it should be noted that the
finer 3-d mesh divides the edge of 1 m length in 5 element
lengths, whereas the coarse 2-d mesh has 4 elements on the
same length. Unfortunately, a finer 3-d mesh could not be
calculated on the computer used. Therefore, when comparing
with the 2-d results, it can be expected that the finer 3-d
discretization with 700 elements produces results comparable
to those from the coarse 2-d mesh with 32 elements.
In the subsequent study, the legend of the figures will point
to the element type with respect to the notation used in Table 1
and if an additional number is given, e.g. 128, it denotes the
number of elements used in the mesh.
Note that, as in other BEM implementations, there is a lower
stability limit, i.e. a minimum time step length condition for a
stable numerical solution in contrast to conditionally stable
Finite Differences schemes or Finite Elements, where usually
an upper limit on the time step length exists. This lower limit
here is determined by numerical tests with decreasing time step
size.
6.1. Results for compressible poroelasticity
Fig. 5(a) displays the displacement results at point P for the
finer mesh in 2-d and 3-d. The results in 2-d can not be
distinguished from each other and hardly from the analytical
solution.
Fig. 4. Comparison to 1-d analytical solut
The mixed linear-constant element brings a small improve-
ment in the lower stability limit on the timestep over the linear
isoparametric element. The optimal timestep on the coarser
mesh is DtZ0.00011 s compared to the DtZ0.00012 s for
linear isoparametric. For the constant element, the optimal
timestep isDtZ0.00033 s. On the finer mesh,DtZ2.5!10K5 s
has been used for all elements.
In 3-d, the optimal time steps used on the coarse 252
element mesh are DtZ0.0003 s for the li-tr element, DtZ0.0004 s for the LC-TR element, and DtZ0.0005 s for the co-tr element. For the finer mesh, an identical timestep, DtZ0.0002 s, has been chosen for both the linear and mixed
elements, and DtZ0.0004 s for the constant element. The
linear element allows the shortest timestep and comes closest
to the analytical solution.
The pore pressure behavior in Fig. 5(b) is essentially the
same as for the displacements, giving almost identical results
for the li-2D and lc-2D elements. Considering the pressure
results, the coarse mesh (3-d) is obviously a too crude
approximation for this material, not being able to resolve the
jumps sharply. The results for the finer mesh (2-d) look
noticeably better, clearly converging to the analytical solution.
Again, the mixed element has no advantages over the
isoparametric linear in 3-d.
6.2. Results for incompressible poroelasticity
If the same problem is considered for a material with
incompressible constituents, the solution changes (see also
[24]). The vibration corresponding to the fast compressional
wave disappears, which means the behavior is now governed
predominantly by the relative fluid to solid movement, because
the shear deformations should not play any significant role in
this 1-d setup. In Section 7, the two models will be tested and
compared on a more realistic example.
The displacement uy at the top surface and the pore pressure
p at the support are plotted against time in Fig. 6 for the finer
meshes.
In 2-d, the optimal timesteps used on the coarser mesh with
32 elements are DtZ0.0002 s for the linear and DtZ0.00015 s
for the mixed and constant elements. When the timestep
is made shorter (but not under the stability limit), i.e.
ion: 3-d geometry and discretization.
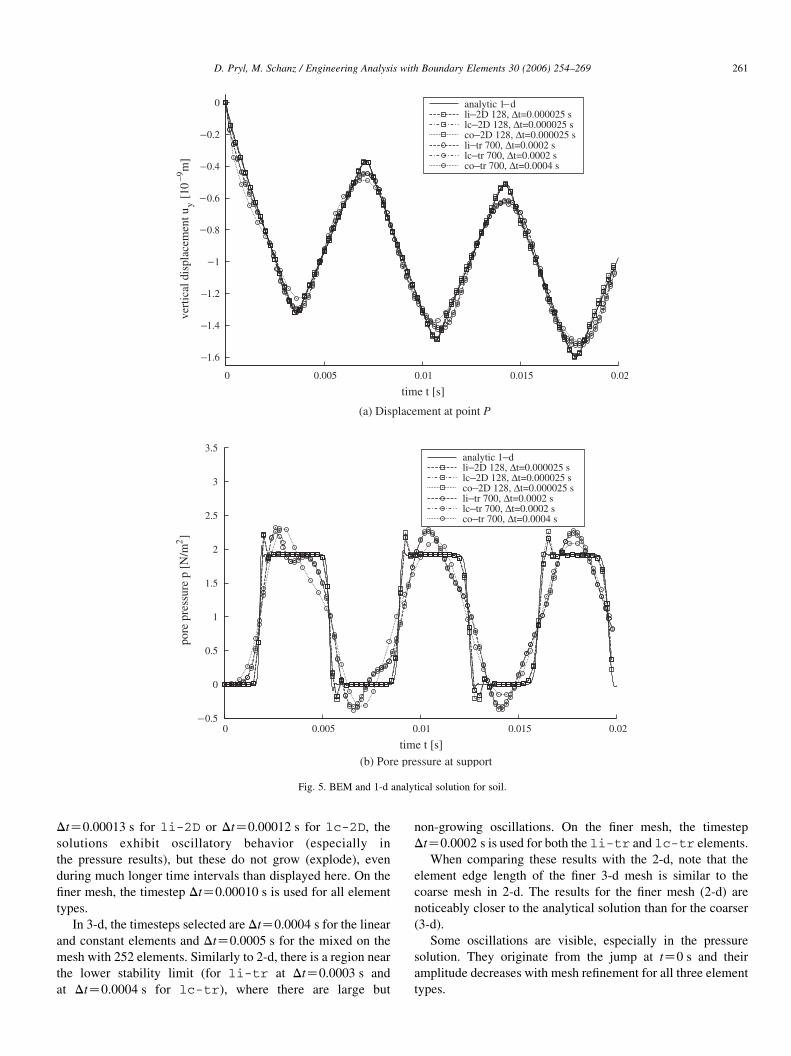
Fig. 5. BEM and 1-d analytical solution for soil.
D. Pryl, M. Schanz / Engineering Analysis with Boundary Elements 30 (2006) 254–269 261
DtZ0.00013 s for li-2D or DtZ0.00012 s for lc-2D, thesolutions exhibit oscillatory behavior (especially in
the pressure results), but these do not grow (explode), even
during much longer time intervals than displayed here. On the
finer mesh, the timestep DtZ0.00010 s is used for all element
types.
In 3-d, the timesteps selected are DtZ0.0004 s for the linear
and constant elements and DtZ0.0005 s for the mixed on the
mesh with 252 elements. Similarly to 2-d, there is a region near
the lower stability limit (for li-tr at DtZ0.0003 s and
at DtZ0.0004 s for lc-tr), where there are large but
non-growing oscillations. On the finer mesh, the timestep
DtZ0.0002 s is used for both the li-tr and lc-tr elements.
When comparing these results with the 2-d, note that the
element edge length of the finer 3-d mesh is similar to the
coarse mesh in 2-d. The results for the finer mesh (2-d) are
noticeably closer to the analytical solution than for the coarser
(3-d).
Some oscillations are visible, especially in the pressure
solution. They originate from the jump at tZ0 s and their
amplitude decreases with mesh refinement for all three element
types.

Fig. 6. BEM and 1-d analytical solution for incompressible soil.
D. Pryl, M. Schanz / Engineering Analysis with Boundary Elements 30 (2006) 254–269262
For this problem, the mixed element offers a slightly better
stability limit over the isoparametric linear element in 2-d. It
also shows less oscillatory behavior when getting close to the
limit. In 3-d, as in all previous 3-d cases, the mixed element is
worse than the linear.
6.3. Comments on the validation
For all element types in both 2-d and 3-d, the results appear
to converge to the 1-d analytical solution as the mesh is refined.
The discretization used in the 3-d case is coarser compared to
that in 2-d with an element edge length of 1/4 versus 1/3 m on
the coarser mesh and 1/16 m versus 1/5 m on the finer mesh,
respectively. As expected, the 2-d results are closer to the
analytical solution.
In 2-d, the mixed elements bring minor improvements over
the isoparametric in terms of stability and result quality. In 3-d,
the mixed elements do not bring any improvements. They
produce worse results and have a narrower stability region than
the isoparametric.
Both was confirmed by tests with another material (a porous
rock, Berea sandstone; not included in this article, see [22]).

Fig. 7. 2-d column: Geometry, boundary conditions, and discretization.
Fig. 8. Results for t
D. Pryl, M. Schanz / Engineering Analysis with Boundary Elements 30 (2006) 254–269 263
In the case of the incompressible rock, the mixed element
offers clearly better stability over the linear one in 2-d.
However, the incompressible model is not a good description
of this material.
The difference between the numerical behavior of the mixed
elements in 2-d and 3-d demands a comment. One of the
possible reasons for different behavior of the element types in
2-d versus 3-d are the different approaches to singular
integration. In 2-d, the singular parts of the integrals are
computed analytically, whereas in 3-d, they are evaluated
numerically. Another, probably more important difference is in
the total degrees of freedom. Whereas there is no element type
dependent difference in the 2-d examples, in 3-d, there are
more nodes for constant approximation (mid-nodes) than for
he 2-d column.

D. Pryl, M. Schanz / Engineering Analysis with Boundary Elements 30 (2006) 254–269264
linear (element corners). This leads to additional degrees of
freedom if some quantity is approximated with a lower degree
shape function.
If this is the main reason for the differences, it may be
interesting to implement and test mixed linear-constant
quadrilateral boundary elements (4 corner nodes, 1 mid-
element node) where the ratio DoFmixed/DoFiso is asymptoti-
cally 1, i.e. the same as for the lc-2D element in 2-d.
Elements combining quadratic and linear shape functions may
be of even more interest, as DoFmixed/DoFiso is always less than
1 if the nodes connected with lower order shape functions are a
subset of the higher order nodes.
Fig. 9. Compressible and inc
The result of the comparison may also depend slightly on
the choice of dimensionless variables (see Section 4.1).
However, no clear dependency has been recognized during
the tests.
7. Comparison of isoparametric and mixed elements in 2-d
and 3-d
In order to investigate the differences between the two
element types, now a more realistic poroelastic column is
considered in 2-d and 3-d. The material data correspond to the
ompressible 2-d column.

D. Pryl, M. Schanz / Engineering Analysis with Boundary Elements 30 (2006) 254–269 265
same water saturated coarse sand (soil) as before but here
the realistic Poisson’s ration (ns0) is used (see Table 2). Also,
the poroelastic column of 3 m length is fixed at the base and
traction-free on the sides. Further, it is loaded with a vertical
force on the top surface, as shown in Figs. 7 and 11. The
support is modeled impermeable (flux qZ0), all other surfaces
are permeable (pore pressure pZ0). Notice that unlike in
Section 6, displacements in direction(s) perpendicular to the
load are now possible, which allows lateral contraction and
waves based on shear to play a role. This makes the column
much more deformable (note the different scale in the results of
both time and displacements).
Fig. 10. Incompressi
7.1. Numerical example: 2-d poroelastic column
To compare the numerical behavior of the implemented
element types, first, a 2-d poroelastic column (3 m!1 m) is
considered (see Fig. 7). The used BEM discretizations are the
same as in Section 6.
The Fig. 8(a) show the displacement uy at the column
surface midpoint and the pore pressure p at the column base
midpoint, respectively, plotted against time for the li-2D,lc-2D, and co-2D elements. On the coarser mesh, the
optimal timestep has been chosen for each element type. The
stability region is slightly larger for the lc-2D element on
ble 2-d column.
D. Pryl, M. Schanz / Engineering Analysis with Boundary Elements 30 (2006) 254–269266
the mesh with 32 elements: DtZ0.00017 s compared to
0.00018 s for li-2D. The results for the finer mesh have
been computed with the same timestep DtZ0.00005 s for all
element types. As there are no visible differences, only the li-2D element results are presented for the finer mesh. In the pore
pressure solution in Fig. 8(b), some oscillations arise with the
arrival of the fast compressional wave (the first non-zero
pressure value) induced by the load application at tZ0 s. They
are damped and have completely dissipated at about tZ0.02 s.
As described in Section 5, with the linear isoparametric
element all the state variables are localized at the geometry
nodes, i.e. the element end-nodes. For the mesh with 32
elements in Fig. 7, this gives 3!32Z96 total degrees of
freedom in the case of the li-2D element. The mixed linear-
constant element defines the solid displacement ui (resp.
traction ti) at the end-nodes and has an extra mid-node for the
pore pressure p (resp. flux q), which yields in total 2!32C1!32Z96 degrees of freedom. Thus, the total number of
degrees of freedom is the same for the linear and mixed
elements (this will be different later in the 3-d example).
Nevertheless, the CPU time needed extends about 1.3!. The
essential source of the extra operations is the need to evaluate
the fundamental solutions for more distinct distance argu-
ments. Clearly, the mixed element does not offer advantages
that would be worth the extra computational cost.
Now the incompressible model will be considered. Fig. 9
shows the displacement uy at point P on the top surface and the
pore pressure p in the middle of the support for the
compressible and incompressible models. Unlike the validation
example in chapter 6, there are no large differences between the
compressible and incompressible models of soil. That is due to
the boundary conditions, which differ substantially from the
validation example.
However, the lower stability limits are not the same as in the
compressible case. In Fig. 10, for each element the
displacement resp. pressure results are displayed for the
optimal timestep, DtZ0.00039 s for the li-2D element,
DtZ0.00018 s for lc-2D, and DtZ0.0003 s for co-2D. Inthis case, the mixed element allows to achieve better results
than the linear isoparametric on the same mesh. On the finer
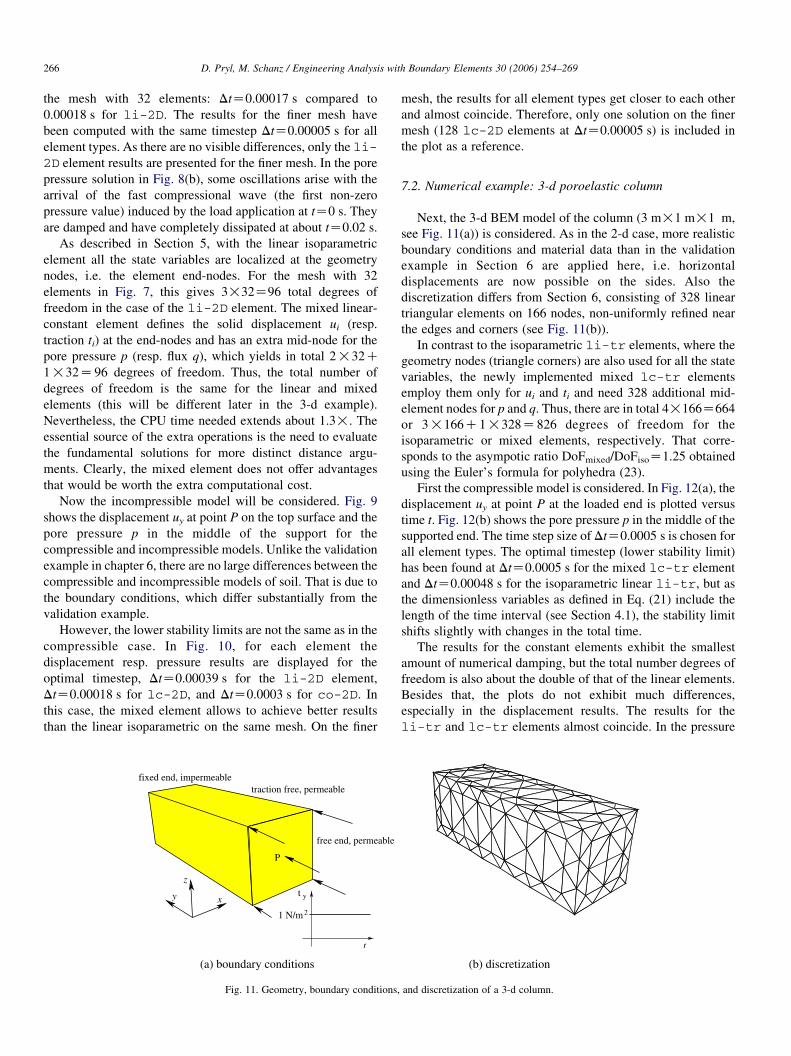
Fig. 11. Geometry, boundary conditions,
mesh, the results for all element types get closer to each other
and almost coincide. Therefore, only one solution on the finer
mesh (128 lc-2D elements at DtZ0.00005 s) is included in
the plot as a reference.
7.2. Numerical example: 3-d poroelastic column
Next, the 3-d BEM model of the column (3 m!1 m!1 m,
see Fig. 11(a)) is considered. As in the 2-d case, more realistic
boundary conditions and material data than in the validation
example in Section 6 are applied here, i.e. horizontal
displacements are now possible on the sides. Also the
discretization differs from Section 6, consisting of 328 linear
triangular elements on 166 nodes, non-uniformly refined near
the edges and corners (see Fig. 11(b)).
In contrast to the isoparametric li-tr elements, where the
geometry nodes (triangle corners) are also used for all the state
variables, the newly implemented mixed lc-tr elements
employ them only for ui and ti and need 328 additional mid-
element nodes for p and q. Thus, there are in total 4!166Z664
or 3!166C1!328Z826 degrees of freedom for the
isoparametric or mixed elements, respectively. That corre-
sponds to the asympotic ratio DoFmixed/DoFisoZ1.25 obtained
using the Euler’s formula for polyhedra (23).
First the compressible model is considered. In Fig. 12(a), the
displacement uy at point P at the loaded end is plotted versus
time t. Fig. 12(b) shows the pore pressure p in the middle of the
supported end. The time step size of DtZ0.0005 s is chosen for
all element types. The optimal timestep (lower stability limit)
has been found at DtZ0.0005 s for the mixed lc-tr element
and DtZ0.00048 s for the isoparametric linear li-tr, but asthe dimensionless variables as defined in Eq. (21) include the
length of the time interval (see Section 4.1), the stability limit
shifts slightly with changes in the total time.
The results for the constant elements exhibit the smallest
amount of numerical damping, but the total number degrees of
freedom is also about the double of that of the linear elements.
Besides that, the plots do not exhibit much differences,
especially in the displacement results. The results for the
li-tr and lc-tr elements almost coincide. In the pressure
and discretization of a 3-d column.

Fig. 12. Compressible 3-d column.
D. Pryl, M. Schanz / Engineering Analysis with Boundary Elements 30 (2006) 254–269 267
plot, a small difference in favor of the mixed element which
shows less numerical damping can be observed. On the other
hand, there is the disadvantage in the lower stability limit.
None of the differences can be considered substantial.
At the same time, the total number of the degrees of freedom
increased by a factor of 1.25, resulting in longer computation
time by a factor of about 1.7, which corresponds to the
quadratic dependence between the degrees of freedom and the
number of operations. Clearly, there are no improvements that
would offset this extra computational cost of the mixed
element.
Now, the results of the incompressible model will be
considered. In Figs. 13(a) and 13(b), the displacement and the
pore pressure for the compressible and incompressible models
are compared for the linear element and timestep length DtZ0.0005 s.
Unlike the test in chapter 6, there are no noticeable
differences between the models with compressible and
incompressible constituents. On the mesh used, the differences
between the models are of the same order as those between the
element types. There is also no difference in the stability region
compared to the compressible model.

Fig. 13. Compressible and incompressible 3-d column.
D. Pryl, M. Schanz / Engineering Analysis with Boundary Elements 30 (2006) 254–269268
8. Conclusions
Mixed linear-constant elements have been implemented in
both 2-d and 3-d BEM. The poroelastodynamic BEM
implementation is tested on examples representing a 1-d
problem in both 2-d and 3-d. It approximates the 1-d analytical
solution very well. For this verification example and additional,
more realistic problems, the results are compared to those of
isoparametric linear elements.
In 2-d, the difference in CPU time is extended by a factor of
1.3 compared to the linear isoparametric elements. For the
compressible model, the (negligibly) shorter possible time step
does not bring any noticeable improvement to the results. The
difference is more pronounced for the incompressible model,
where the mixed element, in at least some cases, offers a
considerable reduction of the lower stability limit and reduces
the oscillatory behavior near the limit.
In most of the 3-d tests, the mixed elements performed
worse than the isoparametric elements with regard to both the
quality of numerical results and the stability. In some tests,
minor improvements are observed in the quality of numerical
results, but the computation time extends by a factor of 1.7 due
to the increase in the total degrees of freedom. In this case, the
advantages clearly do not correspond to the increased

D. Pryl, M. Schanz / Engineering Analysis with Boundary Elements 30 (2006) 254–269 269
computational cost, as one can achieve better results with the
same effort using a finer discretization and linear isoparametric
elements. This corresponds to the conclusions in the Ref. [7].
Acknowledgements
The authors gratefully acknowledge the financial support by
the German Research Foundation (DFG) under grant SCHA
527/5-2.
References
[1] Schanz M. Wave propagation in viscoelastic and poroelastic continua: a
boundary element approach Lecture notes in applied mechanics. Berlin:
Springer; 2001.
[2] Cheng AH-D, Badmus T, Beskos D. Integral equations for dynamic
poroelasticity in frequency domain with BEM solution. J Eng Mech
ASCE 1991;117(5):1136–57.
[3] Manolis G, Beskos D. Integral formulation and fundamental solutions of
dynamic poroelasticity and thermoelasticity. Acta Mech 1989;76:89–104
[errata [25]].
[4] Chen J, Dargush G. Boundary element method for dynamic poroelastic
and thermoelastic analysis. Int J Solids Struct 1995;32(15):2257–78.
[5] Schanz M. Application of 3-d boundary element formulation to wave
propagation in poroelastic solids. Eng Anal Bound Elem 2001;25(4–5):
363–76.
[6] Lewis R, Schrefler B. The finite element method in the static and dynamic
deformation and consolidation of porous media. Chichester: Wiley; 1998.
[7] Steinbach O. Mixed approximations for boundary elements. J Numer
Anal SIAM 2000;38:401–13.
[8] Biot M. General theory of three-dimensional consolidation. J Appl Phys
1941;12:155–64.
[9] Biot M. Theory of propagation of elastic waves in a fluid-saturated porous
solid. I. Low-frequency range. J Acoust Soc Am 1956;28(2):168–78.
[10] Bonnet G, Auriault J-L. Dynamics of saturated and deformable porous
media: Homogenization theory and determination of the solid-liquid
coupling coefficients. In: Boccara N, Daoud M, editors. Physics of finely
divided matter. Berlin: Springer; 1985. p. 306–16.
[11] Biot M. Theory of propagation of elastic waves in a fluid-saturated
porous solid.II. higher frequency range. J Acoust Soc Am 1956;28(2):
179–91.
[12] Bonnet G. Basic singular solutions for a poroelastic medium in the
dynamic range. J Acoust Soc Am 1987;82(5):1758–62.
[13] Detournay E, Cheng AH-D. Fundamentals of poroelasticity. In:
Comprehensive rock engineering: principles, practice and projects, vol.
II. New York: Pergamon Press; 1993. p. 113–71 [chapter 5].
[14] Schanz M, Pryl D. Dynamic fundamental solutions for compressible and
incompressible modeled poroelastic continua. Int J Solids Struct 2004;
41(15):4047–73.
[15] Domınguez J. Boundary element approach for dynamic poroelastic
problems. Int J Numer Method Eng 1992;35(2):307–24.
[16] Lubich C. Convolution quadrature and discretized operational calculus.
I/II. Numer Math 1988;52:129–45 [see also p. 413–425].
[17] Schanz M, Antes H. Application of ‘operational quadrature methods’ in
time domain boundary element methods. Meccanica 1997;32(3):
179–86.
[18] Schanz M. A boundary element formulation in time domain for
viscoelastic solids. Commun Numer Method Eng 1999;15:799–809.
[19] Kielhorn L. Modellierung von wellenausbreitung in porosen boden:
Dimensionslose variablen fur eine randelementformulierung. Diplomar-
beit. Technische Universitat Braunschweig, Institut fur Angewandte
Mechanik, Fachbereich Bauingenieurwesen; 2004.
[20] Guiggiani M, Gigante A. A general algorithm for multidimensional
cauchy principal value integrals in the boundary element method. J Appl
Mech ASME 1990;57:906–15.
[21] Telles J. Elastostatic problems. In: Brebbia C, editor. Topics in boundary
element research. Computational aspects, vol. 3. Berlin: Springer; 1987.
p. 265–94.
[22] Pryl D. Influences of poroelasticity on wave propagation: a time stepping
boundary element formulation. Braunschweig series on mechanics, vol.
58. Technical University Braunschweig; 2005.
[23] de Berg M, van Kreveld M, Overmars M, Schwarzkopf O.
Computational geometry algorithms and applications. 2nd ed. Berlin:
Springer; 2000.
[24] Schanz M, Diebels S. A comparative study of biot’s theory and the linear
theory of porous media for wave propagation problems. Acta Mech 2003;
161(3–4):213–35.
Related Documents











