UNIVERSITE KASDI MERBAH OUARGLA Faculté des Sciences Appliquées Département de Génie Electrique Mémoire MASTER ACADEMIQUE Domaine : Sciences et technologies Filière : Electrotechnique Spécialité : Machines électriques et électronique de puissance Présenté par : Chadou Ilham Bendania Soumia Thème : Soutenu publiquement Le :../../…. Devant le jury : Année universitaire 2016/2017 M r Djarah Djalal MA (A) Président UKM Ouargla M r Khattache Laid MA (A) Encadreur/rapporteur UKM Ouargla M r Zehani Soraya MA (A) Examinateur UKM Ouargla Commande Robuste d'un Moteur Synchrone à Aimants Permanents Double étoiles

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

UNIVERSITE KASDI MERBAH OUARGLA
Faculté des Sciences Appliquées
Département de Génie Electrique
Mémoire MASTER ACADEMIQUE
Domaine : Sciences et technologies
Filière : Electrotechnique
Spécialité : Machines électriques et électronique de puissance
Présenté par :
Chadou Ilham Bendania Soumia
Thème :
Soutenu publiquement
Le :../../….
Devant le jury :
Année universitaire 2016/2017
Mr Djarah Djalal MA (A) Président UKM Ouargla
Mr Khattache Laid MA (A) Encadreur/rapporteur UKM Ouargla
Mr Zehani Soraya MA (A) Examinateur UKM Ouargla
Commande Robuste d'un Moteur
Synchrone à Aimants Permanents
Double étoiles

Remerciement
Avant tout, nous remercions ALLAH tout puissant
de nous avoir donné le courage, la volonté, ET la
patience pour terminer Ce travail.
Nos vifs et sincères remerciements s’adressent tout
particulièrement à notre Université de Kasdi Merbah
– Ouargla-, qui nous a procuré une bonne formation.
En premier lieu, nous tenons à remercier tout
d'abord notre encadreur : Monsieur KHATTACHE
LAID, Maitre-assistant à l'université Kasdi Merbah -
Ouargla- d'avoir offrir l'opportunité de réaliser Ce
travail et de bien vouloir accepter de le diriger avec
beaucoup de compréhension.
Nous n'oublions pas de remercier les mombres de
jury Mr DJARAH DJALAL, MAA à la Faculté de
sciences appliquée de l'université de Kasdi Merbah-
Ouargla; pour accepté de présidé Ce travail.
Nous n'oublions pas de remercier les mombres de
jury Mme ZEHANI SORYA, MAA à la Faculté de
sciences appliquée de l'université de Kasdi Merbah-
Ouargla; pour accepté d’examiné Ce travail.
Nous tenons à remercie aussi Mr Bourekyacine qui
nous a fourni une aide et des conseils.
Nous tenons à remercie aussi: toutes les personnes
qui ont participés de près ou de loin pour la
réalisation de Ce travail.
En fin, nous remerciement à l'en droit de tous notre
Amis en particulier, ceux de notre promotion
2016/2017

Dédicaces
A mes parents avec toute ma gratitude pour toutes ces
Années de sacrifices et encouragement
A mes frères
A mes sœurs
A toute ma famille.
A tous mes Amis ….
A tous ceux que j’aime
Je dédie ce travail.
Soumia

Dédicaces
A mon père décédé …...et à ma mère avec toute ma
gratitude pour toutes ces
Années de sacrifices et encouragement
A mes sœurs
A mes frères
A toute ma famille.
A tous mes Amis ….
A tous ceux que j’aime
Je dédie ce travail.
ILHAM
Liste des figures
CHAPITRE I: Modélisation et simulation de MSAPDE
Figure(I.1) représentation schématique du modèle de Park de la MSAPDE 07
Figure(I.2) La représentation schématique de la machine dans le repère (𝑑, 𝑞). 07
Figure (I.3) : Différents couples qui agissent sur le rotor. 09
Figure(I.4) schéma block de MSAPDE 10
Figure (I.5) La vitesse de rotation 10
Figure (I.6) Le couple électromagnétique 11
Figure (I.7) Coutant statorique (stator 1) 12
Figure (I.8) Coutant statorique (stator 2) 12
Chapitre II: Commande vectorielle de la MSAPDE
Figure(II.1) Machine à courant continu 13
Figure (II.2) Reconstitution des tensions 𝑉𝑑1𝑒𝑡𝑉𝑞1. 15
Figure(II.3) Principe de découplage par compensation 16
Figure(II.4) Boucle de régulateur du courant𝐼𝑑1 16
Figure(II.5) boucle de régulation de vitesse 18
Figure(II.6)Schéma block de commande vectorielle du MSAPDE 19
Figure (II.7) La vitesse de rotation 20
Figure (II.8) Le couple électromagnétique. 20
Figure (II.9) Coutant statorique (stator 1) 21
Figure (II.10) Coutant statorique (stator 2) 21
Chapitre III: Régulateur RST
Figure (III.01) Représentation générale du régulateur RST 25
Figure (III.02) Bloc de régulation de vitesse en boucle fermée 29
Figure(II.3)Schéma block du MSAPDE avec régulateur RST 33
Figure (III.04) Vitesse mécanique 33
Figure (III.05) Couple électromagnétique 34
Figure (III.06) Courant statorique (stator 1) 34
Figure (III.07) Courant statorique (stator 2) 35
Figure (II.08) Test de variation 37

Liste des abréviations
Symbole : Notation
MSAPDE : machines synchrones à aimants permanents double étoile
PI : Régulateur proportionnelle intégrale
d-q : Axes longitudinal et transversal (transformation de Park)
𝑅𝑆1Résistance statorique par phase de stator 1
𝐿𝑑 : Inductance suivant l'axe d
𝐿𝑞 : Inductance suivant l'axe q
𝐼𝑑1 : Le courant statorique de l'axe d
𝐼q1: Le courant statorique de l'axe q
𝐼𝑑2 : Le courant statorique de l'axe d
𝐼q2: Le courant statorique de l'axe q
𝑉𝑑1: La tension statorique de l'axe d
𝑉𝑞1: La tension statorique de l'axe q
𝑉𝑑2: La tension statorique de l'axe d
𝑉𝑞2: La tension statorique de l'axe q
𝑄𝑟 : Flux rotorique (constant)
Wm : Vitesse mécanique
P : Nombre de paire de pôles
J : Moment d'inertie du rotor
𝐶𝑟 : Couple de charge
P : Transformation de Park
Ce : Couple électromagnétique
𝑖dref : Le courant référence statorique

𝑖qref : Le courant référence statorique
𝑊𝑟𝑒𝑓 : Vitesse de référence
𝑉a∗ , Vb
∗ , Vc ∗ : Tension de référence
𝑖𝑑∗ : Courant de référence
𝐾𝑝𝑑𝐾𝑖𝑑 : Coefficient de régulateur PI
𝑀𝑑 : inductance mutuelle
a ,b ,c :axes liés aux enroulements triphasés
p : nombre de paires de pôles
𝜃 : position angulaire du rotor par rapport au stator.
[𝑃𝑆1(𝜃)]: Matrice de transformation de Park (stator 1)
[𝑃𝑆2(𝜃)]: Matrice de transformation de Park (stator 2)
[𝑃𝑆1(𝜃)]−1: Matrice de transformation inverse de Park (stator 1)
[𝑃𝑆1(𝜃)]−1: Matrice de transformation inverse de Park (stator 2)
𝑉𝑎 𝑉𝑏 𝑉𝑐 : Tension statorique de la phase a ,b et c.
𝑉𝑠: Tension statorique.
𝑖𝑎 𝑖𝑏 𝑖𝑐 : courant statorique de la phase a ,b et c.
𝑖𝑠 : Courant statorique.
𝐿𝑑1: Inductance statorique de l'axe d (stator 1)
𝐿𝑞1 : Inductance statorique de l'axe d (stator 1)
𝐿𝑑2 : Inductance statorique de l'axe d (stator 2)
𝐿𝑞2 : Inductance statorique de l'axe q (stator 2)
𝑄𝑎 𝑄𝑏 𝑄𝑖𝑐:Flux statorique de la phase a ,b et c.
𝑄𝑠 : Flux statorique.
RST: coefficients de régulateur

Sommaire
Liste des figures
Liste des abréviations
Introduction générale
01
Chapitre I : Modélisation et simulation de MSAPDE
I.1. Introduction 03
I.2. présentation de la machine synchrone à aiment permanents double étoiles 03
I.2.1.Description de la machine synchrone a aimant permanant 03
I.2.2. Classification de MSAPDE 03
I.3. Les avantages des machines synchrones à aimants permanentes double étoiles 04
I.4. Inconvénients des machines synchrones à aimants permanents double étoiles 04
I.5. Modélisation de la machine SAPDE 04
I.5.1. Modèle MSAPDE 04
I.5.2. Mise en équations dans le repère (abc) 05
I.5.2.1 Équationsélectriques 05
I.5.3.Transformation triphasée-diphasé 06
I.5.3.1.Principe de transformation du Park 06
I.5.4.Modèle biphasé de la machine (repère d,q) 07
I.5.4.1. Équation électrique 08
I.5.4.2. Équation magnétiques 08
I.5.4.3. Équation mécanique 08
I.5.5. La forme matricielle 09
I.6. Simulation 10
I.7. Résultats de simulation 10
I.7.1. Discussion et analyse 12
I.8. Conclusion 12
Chapitre II Commande vectorielle de MSAPDE
II.1. Introduction 13
II.2. Principe de la commande vectorielle de la MSAPDE 13
II.3. Technique de découplage 14
II.3.1 Découplage par compensation 15
II.4. régulateursdes courants 16
II.5. régulateur de la vitesse 18
II.6. Simulation 20
II.6.1. Schéma block 20
II.6.2. Résultats et discussion 20
II.7. Conclusion 23
Chapitre III : Régulateur RST de MSAPDE
III.1 Introductio 24
III.2 Structure du Régulateur RST 24
III.2.1 Principe du régulateur 24
III.2.2 Principe de calcul de régulateur RST 26

III.2.3 Résolution de l’équation de Bézout 27
III.3 Régulation de la vitesse de type RST 29
III.4. simulation 33
III.4.1. Schéma block 33
III.4.2 Résultats de simulation 33
III.4.2.1 Tests de poursuit 33
III.4.2.2 Test de variation paramétrique (robustesse) 35
III.5. Conclusion 37
Conclusion Générale 38
Bibliographie 39
Annexe :Les paramétres de la machine

Introduction
Introduction
Université Kasdi Merbah Ouargla 1
Introduction générale
Pendant les deux dernières décennies, il y a eu un développement dans des méthodes de
conception pour commande des systèmes dynamique non linéaires.
Historiquement le moteur à courant continu a parfaitement assuré le fonctionnement de la
plupart d'équipement industriel. Cependant son principal défaut reste le collecteur mécanique
que l'on tolère mal dans certains environnements et qui fait augmenter les couts d'entretien.
Ces contraintes ont dirigé les études vers les entrainements équipés de machine à courant
alternatif [1].
Les nouvelles applications industrielles nécessitent des variateurs de vitesse ayant des hautes
performances dynamique, une bonne précision en régime permanent, une haute capacité de
surcharge sur toute la plage de vitesse et une robustesse aux différentes perturbations. Ces
dernières années plusieurs techniques ont été développées pour permettre au variateur
d'atteindre ces performances [2].
La commande vectorielle permet d'avoir une dynamique proche de celle de la machine à
courant continu, autrement dit, une dynamique asymptotiquement linéaire et découplée.
Cependant, cette structure de commande en utilisant des régulateurs classique de type PI
nécessite que les paramètres de la machine soient précis (la variation paramétriques internes et
externes du système dues à la température, l'humidité, et aux surcharge occasionnelles
engendrent la perte de la stabilité des régulateurs classiques considérés). Ceci exige une bonne
identification des paramètres, En conséquence, le recours à des régulateurs de commande
robuste pour maintenir un niveau de découplage et de performances acceptable, est nécessaire
[2-3]
La commande recherchée pour un procédé doit assurer certaines propriétés notamment le
suivi d'une consigne malgré la présence de phénomène perturbateurs. Cette commande devra
être compatible avec les contraintes dynamiques que l'on a sur le processus à commander la
diversité des structures de commande est essentiellement liée aux objectifs donnés par le
cahier des charges. Parmi ces structures, On utilisera une méthode de régulation, par la
structure d'un régulateur RST. Cette dernière repose sur un principe formel de manipulation
de polynômes [4].
Introduction
Université Kasdi Merbah Ouargla 2
L'objectif principal de notre travail, C'est d'étudier la structure d'un régulateur RST et
d'essayer de l'appliquer au réglage de la vitesse ou pour suite d'un moteur synchrone à aimant
permanent double étoiles.
Ce mémoire présenté est organisé en trois chapitres :
Le premier chapitre concerne, la modélisation et simulation de MSAPDE
Le deuxième chapitre fera l'objet de l'application de la commande vectorielle à la
MSAPDEou la vitesse est réglée par un régulateur classique de type PI
Le troisième chapitre on abordera l'étude de la commande par régulateur RST, on
détaillera d'abord sa structure puis on essayera de l'appliquer à MSAPDE
On terminera par une conclusion générale ainsi d’une bibliographie indiquant
Quelques sources d’information utilisées.
Chapitre I
Modélisation et simulation de moteur
synchrone à aimant permanent double étoile

Chapitre I Modélisation et simulation de la MSAPDE
Université Kasdi Merbah Ouargla 3
I.1. Introduction
En raison de sa puissance massique élevée, la machine synchrone à aimant permanant
double étoiles a bien mérité sa place dans les applications nécessitant des performances
dynamiques et statiques très élevées. Son principal avantage réside dans l'absence de contacts
électrique glissants, ce qui conduit à une structure simple et faible. Cette simplicité
s'accompagne toutefois d'une grande complexité physique liée aux interactions
électromagnétiques entre le stator et le rotor.
Ce chapitre comporte une modélisation et simulation de la machine synchrone à
aimant permanent double étoile (MSAPDE).
I.2. présentation de la machine synchrone à aiment permanents double
étoiles
Le moteur synchrone à aimant permanent double étoiles (MSAPDE) présente deux
stator semblable au stator de la machines asynchrone à cage. Mais avec un changement des
bobinages rotorique par un aimant permanent qui apportée beaucoup de simplicité comme
l'élimination des ballais (donc les pertes rotorique) [2].
I.2.1.Description de la machine synchrone a aimant permanant
La machine synchrone est devenue attractive et concurrent à la machine à induction
dans le domaine des systèmes d'entrainements électriques. Le grand avantage de cette
dernière est l'élimination des pertes par glissement. En particulier, la machine à aimants
permanents est utilisée largement dans plusieurs applications. Comme les machines-outils, la
robotique, les générateurs aérospatiaux et les véhicules électrique. Cette large utilisation est
devenue possible avec les hautes performances des aimants permanents. Surtout avec le
progrès technologique enregistré dans ce domaine qui a permis de concevoir des
servomoteurs à aimants de plus en plus performants. Ces derniers sont actuellement les mieux
placés pour répondre aux exigences de telles applications [5-6].
I.2.2. Classification de MSAP
Il peuvent étre classée en deux groupes:
Les machines à démarrage direct, avec un enroulement amortisseur pour développer
le couple de démarrage.
Chapitre I Modélisation et simulation de la MSAPDE
Université Kasdi Merbah Ouargla 4
Les machines alimenteés par des oduleurs, généralement ne possédent pas
d'enroulements amortisseurs, qui présentent des performances très intéressantes[7].
I.3. Les avantages des machines synchrones à aimants permanentes double
étoiles
Lors de construction des machines synchrones à aimants permanents double étoiles
l'utilisation des aimants permanents a la place des bobinages d'excitation offrent beaucoup
d'avantage [8-9] :
Suppression de l'alimentation du rotor (absence du contact bagues balais).
Moins des pertes de cuivre, les pertes viennent surtout du stator.
Facteur de puissance et rendement du moteur est améliorées.
Une meilleure performance dynamique.
Construction et maintenance plus simple.
Pas d'échauffement au rotor, et absence des pertes joules.
I.4. Inconvénients des machines synchrones à aimants permanents double
étoiles [10]
Prix des aimants le rend plus cher.
La présence de pulsation de couple.
Risque de désaimantation, ce qui limite l'utilisation par les des contraintes. comme
la température max, courant max….etc.
Pertes par courant de Foucault dans les aimants.
I.5. Modélisation de la machine MSAPDE
I.5.1. Modèle MSAPDE
Le comportement dynamique de la MSAPDE est caractérisé par trois types de
grandeurs : électriques, magnétiques et mécaniques. Ce comportement peut se traduire par
trois types d’équations : équations électriques, équations magnétiques et équations
mécaniques. Quand on modélisé aux équations mécaniques, elles seront introduites à la fin de
la modélisation de MSAPDE.
En plus de plus, pour simplifie la modélisation de cette machine on prendre en tenant
compte les hypothèses suivantes :

Chapitre I Modélisation et simulation de la MSAPDE
Université Kasdi Merbah Ouargla 5
-la machine n'est pas saturée
-les pertes fer et l'effet amortisseur sont négligée
-les pertes par hystérésis et par courants Foucault sont négligées
-L'effet de peau est négligé
-Le couplage capacitif des enroulements est négligé
-La perméabilité des aimants est considérée comme voisine de celle de l'air
-L'effet d'amortisseurs est négligé
-le rotor est supposé lisse de point de vue magnétique
-Les f.é.m. sont sinusoïdales
En cons11équence, les inductances de la machine sont constantes et indépendantes de la
position du rotor
I.5.2. Mise en équations de la MSAPDE dans le repère (abc)
I.5.2.1. équations électriques:
Stator 1 : [𝑉𝑎𝑏𝑐 ]𝑠 = 𝑅𝑠 [𝑖𝑎𝑏𝑐 ]𝑠 +
𝑑
𝑑𝑡[𝑄𝑎𝑏𝑐 ]𝑠
(II.1)
Stator2: [𝑉𝑎′𝑏′𝑐′ ]𝑠 = 𝑅𝑠 [𝑖𝑎′𝑏′𝑐′ ]𝑠 +
𝑑
𝑑𝑡[𝑄𝑎′𝑏′𝑐′ ]𝑠
(II.2)
I.5.2.2.équations magnétiques:
Stator 1 : [𝑄𝑎𝑏𝑐 ]𝑠 = 𝐿𝑠 [𝑖𝑎𝑏𝑐 ]𝑠 + [𝑄𝑓𝑎𝑏𝑐 ]𝑠 (II.3)
Stator 2 [𝑄𝑎′𝑏′𝑐′ ]𝑠 = 𝐿𝑠 [𝑖𝑎′𝑏′𝑐′ ]𝑠 + [𝑄𝑓𝑎′𝑏′𝑐′ ]𝑠
(II.4)
Ou :
Vabc = [Va Vb Vc]T : vecteur tensions statoriques.
Va′b′c′ = [Va′ Vb′ Vc′ ]T : vecteur tensions statoriques2.

Chapitre I Modélisation et simulation de la MSAPDE
Université Kasdi Merbah Ouargla 6
iabc = [ia ib ic]T : vecteur courants statoriques.
ia′b′c′ = [ia′ ib′ ic′ ]T : vecteur courants statoriques2.
Qabc = [Qa QbQc ]T : vecteur flux statoriques.
Qa′bc = [Qa′ Qb ′Qc ′]T : vecteur flux statoriques 2.
𝑅𝑠1 = 𝑅𝑆2 = 𝑅𝑆
𝑅𝑠 =
𝑅𝑠 0 00 𝑅𝑠 00 0 𝑅𝑠
: Matrice résistance du stator1 (la même pour le stator 2).
𝑄𝑓𝑎𝑏𝑐 = [𝑄𝑎𝑓𝑄𝑏𝑓𝑄𝑐𝑓 ]𝑇: Vecteur flux crée par l'aimant à travers l'enroulement statorique 1.
𝑄𝑓 𝑎′𝑏′𝑐′ = [𝑄𝑎′𝑓𝑄𝑏′𝑓𝑄𝑐′𝑓]𝑇 : Vecteur flux crée par l'aimant à travers l'enroulement
statorique 2.
I.5.3.Transformation triphasée-diphasé
I.5.3.1.Principe de transformation du Park :
La transformation de Park est définie par la matrice P aux vecteurs originaux, [𝑉𝑎𝑏𝑐 ], [𝐼𝑎𝑏𝑐 ] et
[𝑄𝑎𝑏𝑐 ], la transformation de Park correspond aux vecteurs [𝑉𝑑𝑞0], [𝐼𝑑𝑞0] et [𝑄𝑑𝑞0].
La transformation de Park est définie par :
[𝑉𝑎𝑏𝑐 ]= [P(𝜃)] [𝑉𝑑𝑞0]
[𝑉𝑑𝑞0]= [𝑃(𝜃)]−1[𝑉𝑎𝑏𝑐 ]
[𝑃𝑆1(𝜃)][𝑃𝑆2(𝜃)] et [𝑃(𝜃)]−1 sont des matrice de passage directe pour les deux statoret
inverse, elles sont données par :
La matrice de Park pour l'étoile 1 :
[𝑃𝑆1(𝜃)] = 2
3
cos(𝜃) cos(𝜃 −
2ᴫ
3) cos(𝜃 +
2ᴫ
3)
−𝑠𝑖𝑛(𝜃) −sin(𝜃 −2ᴫ
3) sin(𝜃 +
2ᴫ
3)
1
2
1
2
1
2
Chapitre I Modélisation et simulation de la MSAPDE
Université Kasdi Merbah Ouargla 7
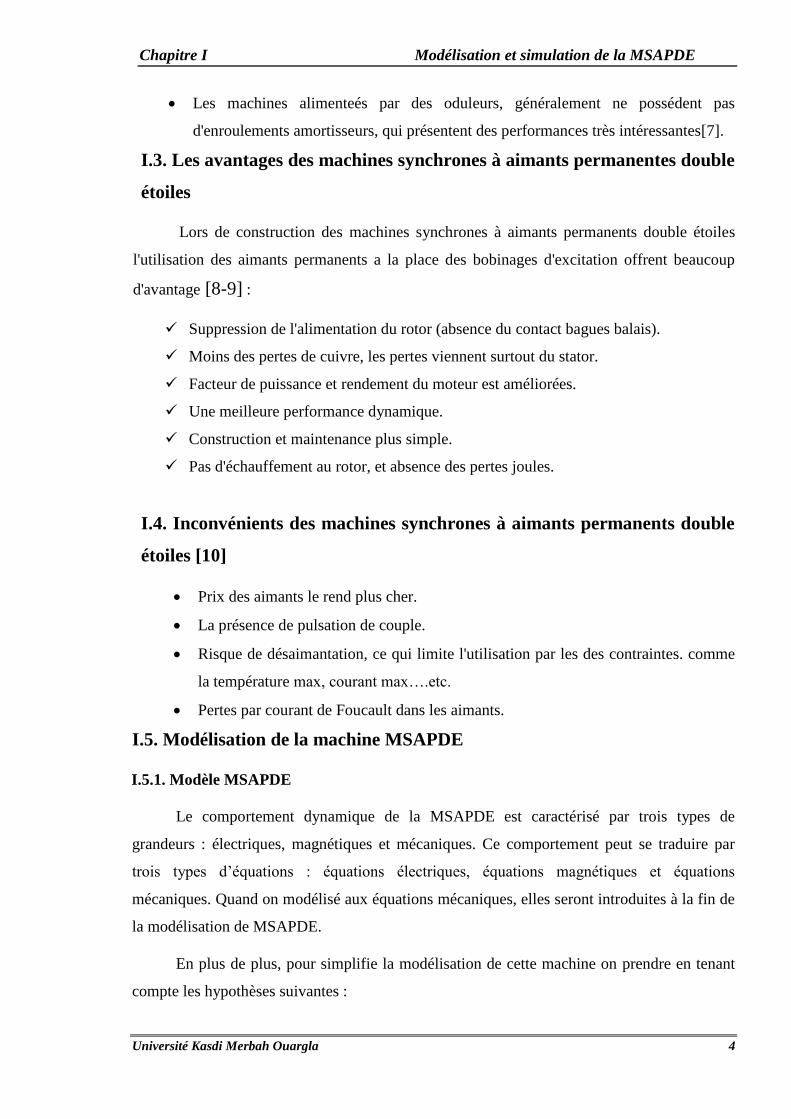
La matrice de Park pour l'étoile 2 :
[𝑃𝑆2 𝜃 ] = 2
3
cos(𝜃 − 𝑎) cos(𝜃 − 𝑎 −
2ᴫ
3) cos(𝜃 − 𝑎 +
2ᴫ
3)
−𝑠𝑖𝑛(𝜃 + 𝑎) −sin(𝜃 − 𝑎 −2ᴫ
3) −sin(𝜃 − 𝑎 +
2ᴫ
3)
1
2
1
2
1
2
La matrice inverse de Park :
[𝑃(𝜃)]−1 = 2
3
cos(𝜃) −𝑠𝑖𝑛(𝜃)
1
2
cos(𝜃 −2ᴫ
3) −sin(𝜃 −
2ᴫ
3)
1
2
cos(𝜃 +2ᴫ
3) −sin(𝜃 +
2ᴫ
3)
1
2
Figure(I.1) représentation schématique du modèle de Park de la MSAPDE
I.5.4. modèle biphasé de la machine (repère d-q)
Figure(I.2) La représentation schématique de la machine dans le repère (𝑑, 𝑞).

Chapitre I Modélisation et simulation de la MSAPDE
Université Kasdi Merbah Ouargla 8
I.5.4.1. Équations électriques :
Équations de tensions :
𝑉𝑑1 = 𝑅𝑑1 . 𝑖𝑑1 + 𝑑𝑄𝑑1
𝑑𝑡− 𝜔𝑚 .𝑄𝑞1
(I. 5)
𝑉𝑞1 = 𝑅𝑞1. 𝑖𝑞1 + 𝑑𝑄𝑞1
𝑑𝑡+ 𝜔𝑚 .𝑄𝑑2
(I. 6)
𝑉𝑠𝑑2 = 𝑅𝑑2 . 𝑖𝑑2 + 𝑑𝑄𝑑2
𝑑𝑡− 𝜔𝑚 .𝑄𝑞2
(I. 7)
𝑉𝑠𝑞2 = 𝑅𝑞2. 𝑖𝑞2 + 𝑑𝑄𝑞2
𝑑𝑡+ 𝜔𝑚 .𝑄𝑑2
(I. 8)
I.5.4.2.Équations magnétiques :
Qr = constant (I. 9)
𝑄𝑑1 = 𝐿𝑑1 . 𝐼𝑑1 + 𝑄𝑟 + 𝑀𝑑 . 𝐼𝑑2 (I. 10)
𝑄𝑞1 = 𝐿𝑞1. 𝐼𝑞1 + 𝑀𝑑 . 𝐼𝑑1 (I. 11)
𝑄𝑑2 = 𝐿𝑑2 . 𝐼𝑑2 + 𝑄𝑟 + 𝑀𝑑 . 𝐼𝑑1 (I.12)
𝑄𝑞2 = 𝐿𝑞2. 𝐼𝑞2 + 𝑀𝑑 . 𝐼𝑑1 (I.13)
E = ωm Qd1 + Qd2 − Qq1 + Qq2 (I. 14)
I.5.4. 3.Equation mécanique :
𝐽𝑑Ω
𝑑𝑡= 𝐶𝑒𝑚 − 𝐶𝑟
(I.11)
Avec:
𝐽: Moment d’inertie.
: Vitesse de rotation rotorique de la machine.
Chapitre I Modélisation et simulation de la MSAPDE
Université Kasdi Merbah Ouargla 9
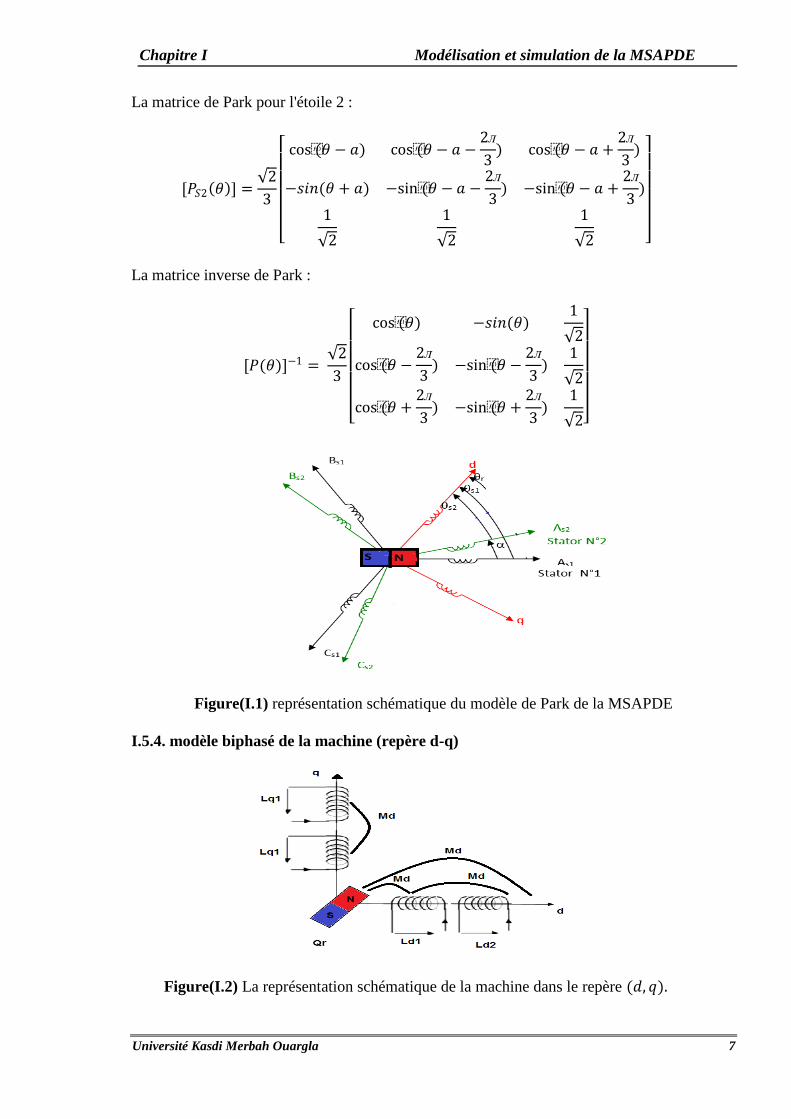
𝐶𝑒𝑚 : Couple électromagnétique.
𝐶𝑟 : Couple résistant (couple de charge).
L'expression du couple électromagnétique est donnée par :
𝐶𝑒 = 32 .𝑃.𝑄𝑟 . 𝐼𝑞1 + 𝐼𝑞2
(I.12)
Figure (I.3) : Différents couples qui agissent sur le rotor.
I.5.5. La forme matricielle
[V]=[R] [I] + [L] [𝑑𝐼 𝑑𝑡 ] + 𝜔𝑠[M] [I] + 𝜔𝑠[Q] (I.13)
[R]=
Rs
Rs
Rs
Rs
000
000
000
000
[L]=
200
020
010
001
LqMd
LdMd
MdLq
MdLd
[M]=
020
200
001
010
LdMd
LqMD
MdLd
MdLq

Chapitre I Modélisation et simulation de la MSAPDE
Université Kasdi Merbah Ouargla 10
I.6. Simulation de MSAPDE
La figure I.4 représente le modèle MATLAB/SIMULINK pour la simulation du moteur
synchrone à aimant permanant double étoiles.
Figure(I.4) schéma block de MSAPDE
I.7. Résultats de simulation Les résultats de simulation représentent l’évolution de la vitesse (Wm), le couple
électromagnétique (Cem), les courants (id1, iq1, id2, iq2).
Figure (I.5) La vitesse de rotation
0 1 2 3 4 5 6 7-1000
-500
0
500
1000
Temps (s)
Vit
ess
e W
n (
rad
/s)
Chapitre I Modélisation et simulation de la MSAPDE
Université Kasdi Merbah Ouargla 11
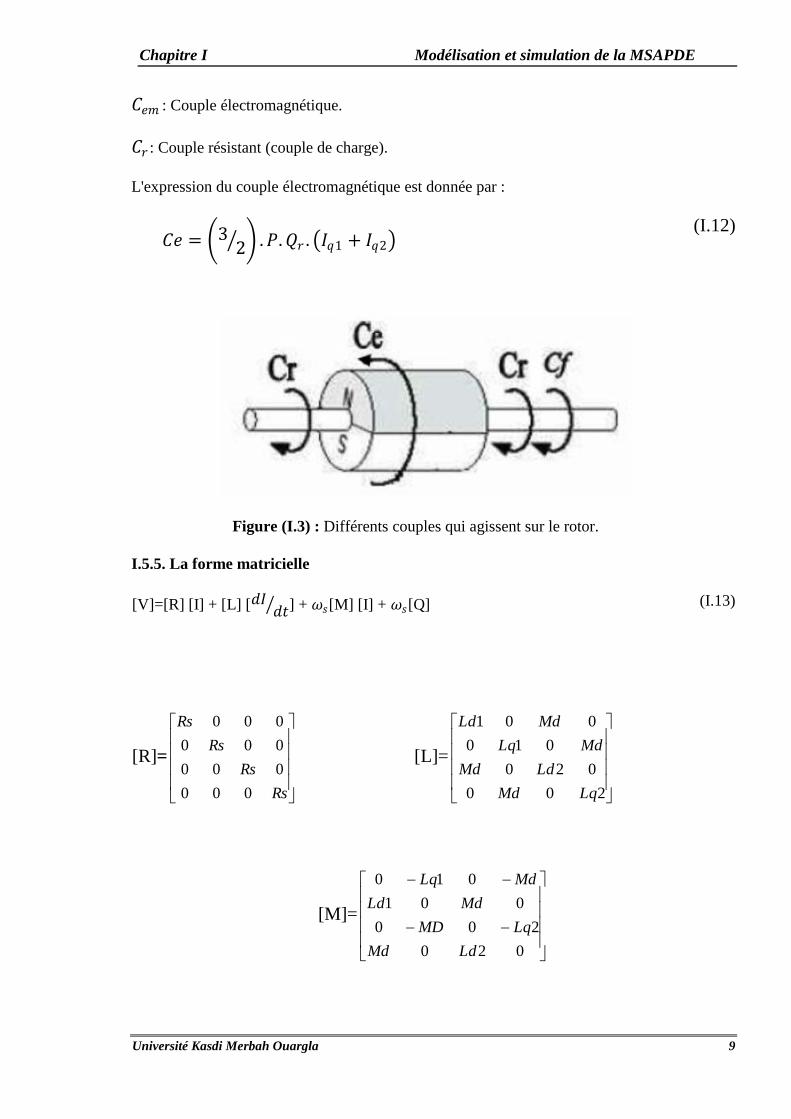
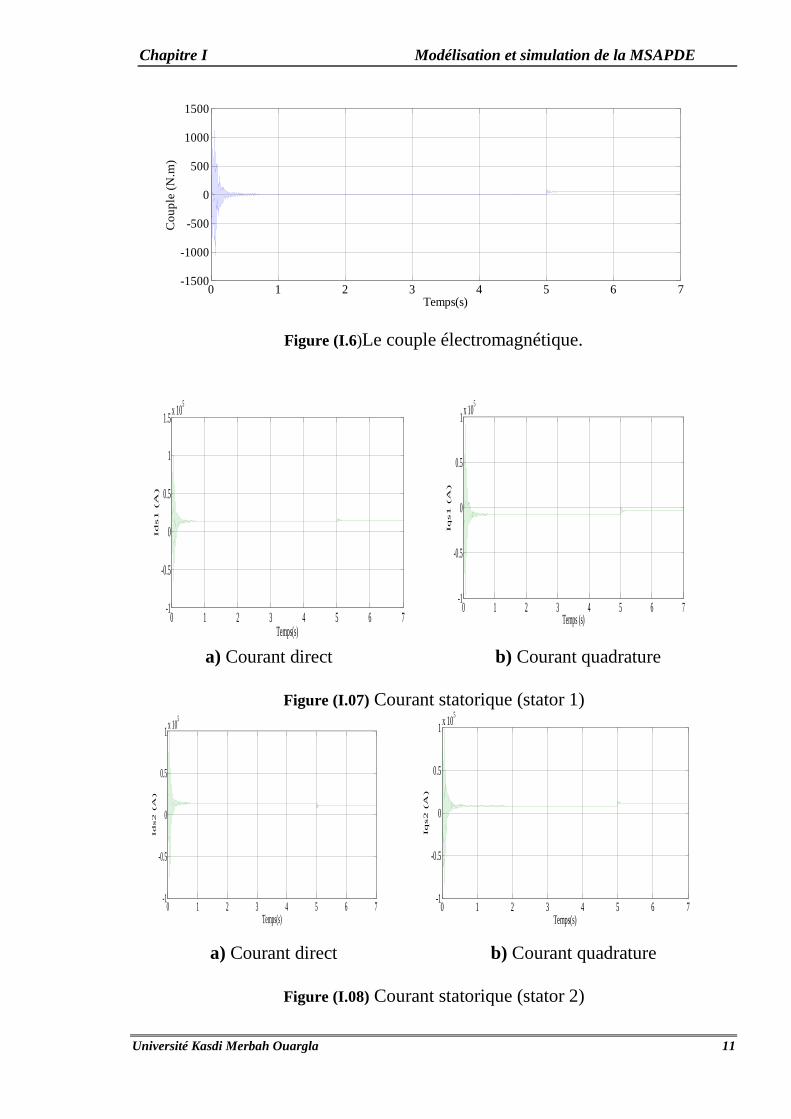
Figure (I.6)Le couple électromagnétique.
a) Courant direct b) Courant quadrature
Figure (I.07) Courant statorique (stator 1)
a) Courant direct b) Courant quadrature
Figure (I.08) Courant statorique (stator 2)
0 1 2 3 4 5 6 7-1500
-1000
-500
0
500
1000
1500
Temps(s)
Co
up
le (
N.m
)
0 1 2 3 4 5 6 7-1
-0.5
0
0.5
1
1.5x 10
5
Temps(s)
Id
s1
(A
)
0 1 2 3 4 5 6 7-1
-0.5
0
0.5
1x 10
5
Temps (s)
Iq
s1
(A
)
0 1 2 3 4 5 6 7-1
-0.5
0
0.5
1x 10
5
Temps(s)
Id
s2
(A
)
0 1 2 3 4 5 6 7-1
-0.5
0
0.5
1x 10
5
Temps(s)
Iq
s2
(A
)

Chapitre I Modélisation et simulation de la MSAPDE
Université Kasdi Merbah Ouargla 12
Au démarrage ou la valeur du couple résistant est nulle, on constate un couple
électromagnétique (Ce) fortement pulsatoire qui présente des oscillations et des pics ainsi
qu'un dépassement très important qui dues au régime transitoire. La vitesse 𝑊𝑚 et les courants
(id1, iq1, id2, iq2) ont des faibles oscillations même pour le dépassement il est faible, mais
juste après un temps très court on remarque une stabilisation du couple à une valeur constante
très faible qui tend vers zéro c’est-à-dire que le régime permanent est atteint et l'inertie de la
machine est faible, même pour les autre grandeurs qui vont se stabiliser.
La machine est sollicitée un couple résistant de valeur Cr=50(N.m) dans un temps donné T=5
(s) on remarque des variations causé sur le couple électromagnétique, lecourant, la vitesse.
I.8. Conclusion
Dans ce chapitre on a présenté la modélisation et la simulation de la machine synchrone à
aimants permanents double étoiles au triphasé. Puis au biphasé à l’aide de transformé de
Park, qui nous permet à simplifierl'équations de moteur.
Dans le but de contrôle les grandeurs de sortie sans interaction entre elles, on a recours à la
commande vectorielle par orientation du flux. Cette dernière qui permette d'avoir un
contrôle indépendant du couple et du flux fera l'objet du chapitre suivant.

Chapitre II
Commande vectorielle
de la MSAPDE
Chapitre II Commande vectorielle de la MSAPDE
Université Kasdi Merbah Ouargla 13
II.1. Introduction
Blaschke et Hasse en 1972, ont proposé une technique de commande dite commande
vectorielle appelée aussi commande par orientation de flux. L'idée fondamentale de cette
stratégie est d'assimiler le comportement de la machine synchrone à celui d'une machine à
courant continu c’est-à-dire un modèle linéaire et découplé ce qui permet d'améliorer son
comportement dynamique.
Ce chapitre présente la commande vectorielle appliquée à la MSAPDE. Les boucles
des courants et la boucle de vitesse sont régulées à l'aide de correcteurs classique PI. Des
résultats de simulation sont présentés pour montrer les performances de la régulation
proposée.
II.2. Principe de la commande vectorielle de la MSAPDE
Le principe du découplage permet de modéliser la machine synchrone comme une
machine à courant continu, par application de cette nouvelle technique de commande. Ceci
concilie les avantages des propriétés du moteur à courant continu et de l'absence du collecteur
mécanique. Le contrôle du couple d'une machine alternative nécessite un contrôle en phase et
en amplitude des courants d'alimentation d’où le nom de contrôle vectoriel. Pour réaliser un
contrôle similaire à celui des machines à courant continu à excitation séparée, il est nécessaire
de maintenir le courant Id1 nul et de réguler la vitesse ou la position par le courant Iq1 via la
tension𝑉𝑞1. Physiquement, cette stratégie revient à maintenir le flux de réaction d'induit en
quadrature avec le flux rotorique produit par le système d'excitation [10].
Figure(II.1) Machine à courant continu

Chapitre II Commande vectorielle de la MSAPDE
Université Kasdi Merbah Ouargla 14
La commande vectorielle sert alors à contrôler les deux composantes (𝑖𝑑1), (𝑖𝑞1), du
courants statorique, en imposant les tensions (𝑉𝑑1 ) et (𝑉𝑞1 ) qui conviennent. Quand le
courant (𝑖𝑑1 ) est nul, le modèle de la MSAPDE se réduit à sa représentation sur l'axe (q),
identique à celui d'une MCC a excitation séparée
Le principe de correction (régulation) consiste à réguler les courants statorique et la vitesse à
partir des grandeurs de référence (désirées) par les régulateurs classiques PI.
II.3. Technique de découplage
Les lois de commande vectorielle des machines alimentée en tension présente des
couplages entre les actions sur les axes (d) et (q). Dans un repère (d) et (q) avec l'axe (d)
aligné sur le flux rotorique, on a les équations suivantes [10-11]:
𝑉𝑑1=𝑅𝑠 . 𝑖𝑑1 + 𝐿𝑑1𝑑𝑖𝑑1
𝑑𝑡−𝑊𝑚 . 𝐿𝑞1. 𝑖𝑞1 (II.1)
𝑉𝑞1=𝑅𝑠 . 𝑖𝑞1 + 𝐿𝑞1𝑑𝑖𝑞1
𝑑𝑡+ 𝑊𝑚 . (𝐿𝑑1. 𝑖𝑑1 + 𝑄𝑟) (II.2)
𝑉𝑑2=𝑅𝑠 . 𝑖𝑑2 + 𝐿𝑑2𝑑𝑖𝑑2
𝑑𝑡−𝑊𝑚 . 𝐿𝑞2. 𝑖𝑞2 (II.3)
𝑉𝑞2=𝑅𝑠 . 𝑖𝑞2 + 𝐿𝑞2𝑑𝑖𝑞2
𝑑𝑡+ 𝑊𝑚 . (𝐿𝑑2. 𝑖𝑑2 + 𝑄𝑟) (II.4)
Pour découpler l'évolution des courants𝑖𝑑1 , 𝑖𝑞1 , 𝑖𝑑2𝑖𝑞2 par rapport aux commandes, on va
défini des termes de compensation 𝐹𝑒𝑚𝑑 1 ,𝐹𝑒𝑚𝑞 1𝐹𝑒𝑚𝑑 2 𝑒𝑡 𝐹𝑒𝑚𝑞 2tel que :
𝑉𝑑1=𝑉′𝑑1 − 𝐹𝑒𝑚𝑑 1 (II.5)
𝑉𝑞1=𝑉′𝑞1 + 𝐹𝑒𝑚𝑞 1 (II.6)
𝑉𝑑2=𝑉′𝑑2 − 𝐹𝑒𝑚𝑑 2 (II.7)
𝑉𝑞2=𝑉′𝑞2 + 𝐹𝑒𝑚𝑞 2 (II.8)
𝑉′𝑑1=𝑅𝑠 . 𝑖𝑑1 + 𝐿𝑑1
𝑑𝑖𝑑1
𝑑𝑡 (II.9)
𝑉′𝑞1=𝑅𝑠 . 𝑖𝑞1 + 𝐿𝑞1
𝑑𝑖𝑞1
𝑑𝑡 (II.10)
𝑉′𝑑2=𝑅𝑠 . 𝑖𝑑2 + 𝐿𝑑2
𝑑𝑖𝑑2
𝑑𝑡 (II.11)
𝑉′𝑞2=𝑅𝑠 . 𝑖𝑞2 + 𝐿𝑞2
𝑑𝑖𝑞2
𝑑𝑡 (II.12)
𝐹𝑒𝑚𝑑 1=𝑊𝑚 . 𝐿𝑞1. 𝑖𝑞1 (II. 13)

Chapitre II Commande vectorielle de la MSAPDE
Université Kasdi Merbah Ouargla 15
𝐹𝑒𝑚𝑞 1=𝑊𝑚 . (𝐿𝑑1. 𝑖𝑑1 + 𝑄𝑟) (II. 14)
𝐹𝑒𝑚𝑑 2=𝑊𝑚 . 𝐿𝑞2. 𝑖𝑞2 (II. 15)
𝐹𝑒𝑚𝑞 2=𝑊𝑚 . (𝐿𝑑2. 𝑖𝑑2 + 𝑄𝑟) (II. 16)
Les tensions 𝑉𝑑1et𝑉𝑞1 sont alors reconstitués à partir des tensions 𝑉′𝑑1 et 𝑉′𝑞1 et illustrés sur
la figure(II.2):
Figure (II.2) Reconstitution des tensions Vd1 et Vq1
II.3.1. Découplage par compensation
La compensation donc, a pour but de découpler les axes d et q. ce découplage permet d'écrire
les équations de la machine et de la partie régulation d'une maniéré simple et ainsi de calcule
aisément les coefficients des régulateurs [10-11].
Le principe de cz découplage revient à définir deux nouvelles variables de
commande𝐹𝑒𝑚𝑑 1 ,𝐹𝑒𝑚𝑞 1,𝐹𝑒𝑚𝑑 2 ,𝐹𝑒𝑚𝑞 2 .
On a donc les courants 𝑖𝑑1, 𝑖𝑞1, 𝑖𝑑2 𝑒𝑡 𝑖𝑞2 , ne dépend que de 𝑉𝑑1,𝑉𝑞1,𝑉𝑑2 𝑒𝑡 𝑉𝑞2 . Ces
expressions s'écrivent comme suit :
𝑖𝑑1 = 𝑉′𝑑1 𝑅𝑠 + 𝑠. 𝐿𝑑1 (II. 17)
𝑖𝑞1 = 𝑉′𝑞1 𝑅𝑠 + 𝑠. 𝐿𝑞1 (II. 18)
𝑖𝑑2 = 𝑉′𝑑2 𝑅𝑠 + 𝑠. 𝐿𝑑2 (II. 19)
𝑖𝑞2 = 𝑉′𝑞2 𝑅𝑠 + 𝑠. 𝐿𝑞2 (II. 20)
Chapitre II Commande vectorielle de la MSAPDE
Université Kasdi Merbah Ouargla 16
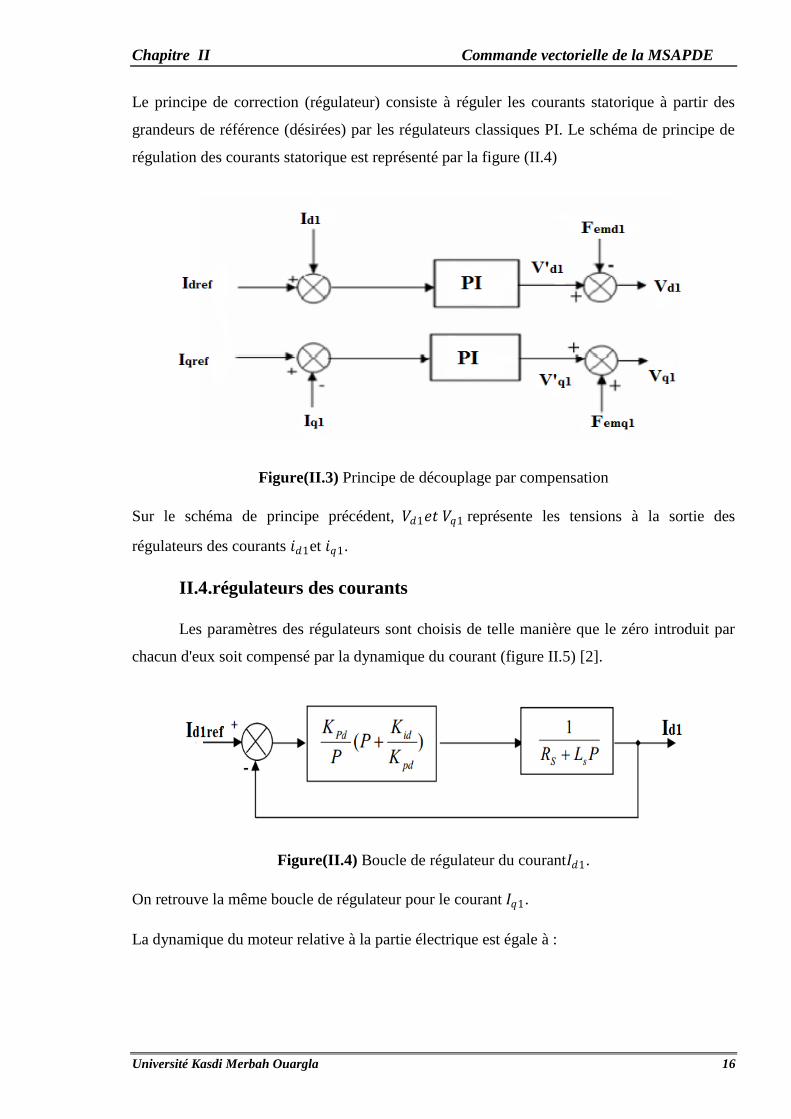
Le principe de correction (régulateur) consiste à réguler les courants statorique à partir des
grandeurs de référence (désirées) par les régulateurs classiques PI. Le schéma de principe de
régulation des courants statorique est représenté par la figure (II.4)
Figure(II.3) Principe de découplage par compensation
Sur le schéma de principe précédent, 𝑉𝑑1𝑒𝑡 𝑉𝑞1 représente les tensions à la sortie des
régulateurs des courants 𝑖𝑑1et 𝑖𝑞1.
II.4.régulateurs des courants
Les paramètres des régulateurs sont choisis de telle manière que le zéro introduit par
chacun d'eux soit compensé par la dynamique du courant (figure II.5) [2].
Figure(II.4) Boucle de régulateur du courant𝐼𝑑1.
On retrouve la même boucle de régulateur pour le courant 𝐼𝑞1.
La dynamique du moteur relative à la partie électrique est égale à :

Chapitre II Commande vectorielle de la MSAPDE
Université Kasdi Merbah Ouargla 17
𝐺𝑑 𝑃 =1
𝑅𝑠 + 𝐿𝑠𝑃=
1
𝑅𝑠(1 + 𝑇𝑑1𝑃)
(II.21)
Avec :𝑇𝑑 =𝐿𝑆
𝑅𝑆 (II.22)
𝑇𝑑1:Est la constante de temps électrique relative à l'axe d1.
Cependant, pour déterminer l
FTBO:God P =K id
P 1 +
Kpd
K idP
1
Rs (1+Td P)
(II.23)
es constantes du correcteur, on dégage la fonction de transfert en boucle ouvert :
En plaçant le zéro du correcteur de façon à compenser le pole du système en boucle ouverte,
c-à-dire :
𝑇𝑑1 =𝐾𝑝𝑑𝐾𝑖𝑑
(II.24)
Ce qui ramène les fonctions de transfert des courants en boucle fermée aux expressions
suivantes :
𝐹𝑇𝐵𝐹 =𝐹𝑇𝐵𝑂
1 + 𝐹𝑇𝐵𝑂
𝐺𝑓𝑑 𝑃 =𝐼𝑑𝐼𝑑𝑟𝑒𝑓
=𝐺𝑜𝑑
1 + 𝐺𝑜𝑑=
1
1 +𝑅𝑠
𝐾𝑖𝑑 𝑃
=1
1 + 𝜏𝑑𝑃
(II.25)
En choisissant (𝜏𝑑 = 𝑇𝑑), donc :𝐾𝑖𝑑 =𝑅𝑠
𝑇𝑠=
𝑅𝑠2
𝐿𝑠
D’où :𝐾𝑝𝑑 = 𝐾𝑖𝑑 .𝑇𝑑

Chapitre II Commande vectorielle de la MSAPDE
Université Kasdi Merbah Ouargla 18
II.5. régulateur de vitesse
La régulateur de la vitesse permet de déterminer le couple référence, afin de maintenir
la vitesse correspondante. La dynamique de la vitesse est donnée par l'équation mécanique
suivante [2] :
𝐽𝑑Ω
𝑑𝑡+ 𝑓Ω = 𝐶𝑒 − 𝐶𝑟 Ω =
𝐶𝑒−𝐶𝑟
𝐽𝑃+𝑓
f=0 Ω =𝐶𝑒−𝐶𝑟
𝐽𝑃(II.26)
Figure(II.5) Boucle de régulation de vitesse.
La fonction de transfert du régulateur de vitesse est donnée par :
𝐾𝑝 +𝐾𝑖𝑃
=𝐾𝑝
𝑃 𝑃 +
𝐾𝑖𝐾𝑝
(II. 27)
La fonction de transfert du système précédent en boucle ouverte pour 𝐶𝑟 = 0 est donnée par :
𝐹𝑇𝐵𝑂Ω =𝐾𝑝
𝑃 𝑃 +
𝐾𝑖𝐾𝑝
1
𝐽𝑃
(II.28)
En adoptant la méthode de placement de pole et la fonction de transfert de la vitesse en boucle
fermée est donnée par :
𝐹𝑇𝐵𝐹Ω =Ω
Ω𝑟𝑒𝑓=
𝐾𝑝 𝑃 +𝐾𝑖
𝐾𝑝
𝐽𝑃2 + 𝑃𝐾𝑝 + 𝐾𝑖
(II.29)
La 𝐹𝑇𝐵𝐹Ω possède une dynamique de 2è𝑚𝑒 ordre, par identification à la forme canonique du
2è𝑚𝑒 ordre dont l'équation caractéristique est représentée comme suit :

Chapitre II Commande vectorielle de la MSAPDE
Université Kasdi Merbah Ouargla 19
1
𝜔02 𝑃² +
2𝜀
𝜔0 𝑃 + 1 = 0 (II.30)
Alors :𝐽
𝐾𝑖=
1
𝜔02
𝐾𝑝𝐾𝑖
=2𝜀
𝜔0
Avec :𝐾𝑖 = 𝐽𝜔02 (II.31)
Si on pose : 𝜀 = 0.7
𝐾𝑃 =2𝜀𝐾𝑖𝜔0
(II.32)
On obtient : 4𝐽/𝜏²𝐾𝑖 . 𝜏
avec :
𝜏 =𝐿𝑠𝑅𝑠
(II.33)

Chapitre II Commande vectorielle de la MSAPDE
Université Kasdi Merbah Ouargla 20
II.6.Simulation :
II.6.1. Schéma block
Figure(II.6) Schéma block de commande vectorielle du MSAPDE
II.6.2. Résultats et discussion
Après la réalisation du découplage et la synthèse des régulateurs, et afin de tester les
performances de la commande vectorielle appliquée à la MSAPDE, nous avons simulé le
fonctionnement de moteur à l'aide de logiciel MATLAB/ SIMULINK.
Les paramètres de la machine utilisée pour la simulation sont donnés à l'annexe.
Figure (II.7) La vitesse de rotation
0 1 2 3 4 5 6 7 8 9 10-300
-200
-100
0
100
200
300
400
temps(s)
Vit
esse
(ra
d/s
)
Chapitre II Commande vectorielle de la MSAPDE
Université Kasdi Merbah Ouargla 21
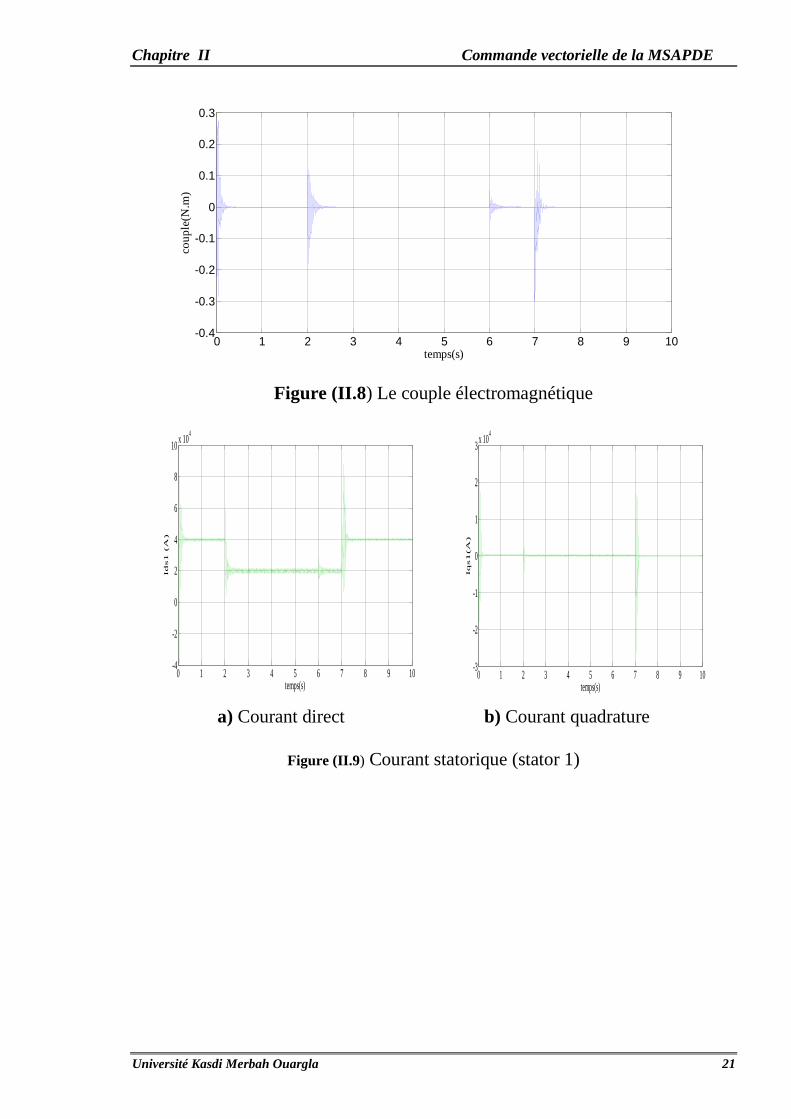
Figure (II.8) Le couple électromagnétique
a) Courant direct b) Courant quadrature
Figure (II.9) Courant statorique (stator 1)
0 1 2 3 4 5 6 7 8 9 10-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
temps(s)
co
up
le(N
.m)
0 1 2 3 4 5 6 7 8 9 10-4
-2
0
2
4
6
8
10x 10
4
temps(s)
Id
s1
(A
)
0 1 2 3 4 5 6 7 8 9 10-3
-2
-1
0
1
2
3x 10
4
temps(s)
Iq
s1
(A
)
Chapitre II Commande vectorielle de la MSAPDE
Université Kasdi Merbah Ouargla 22
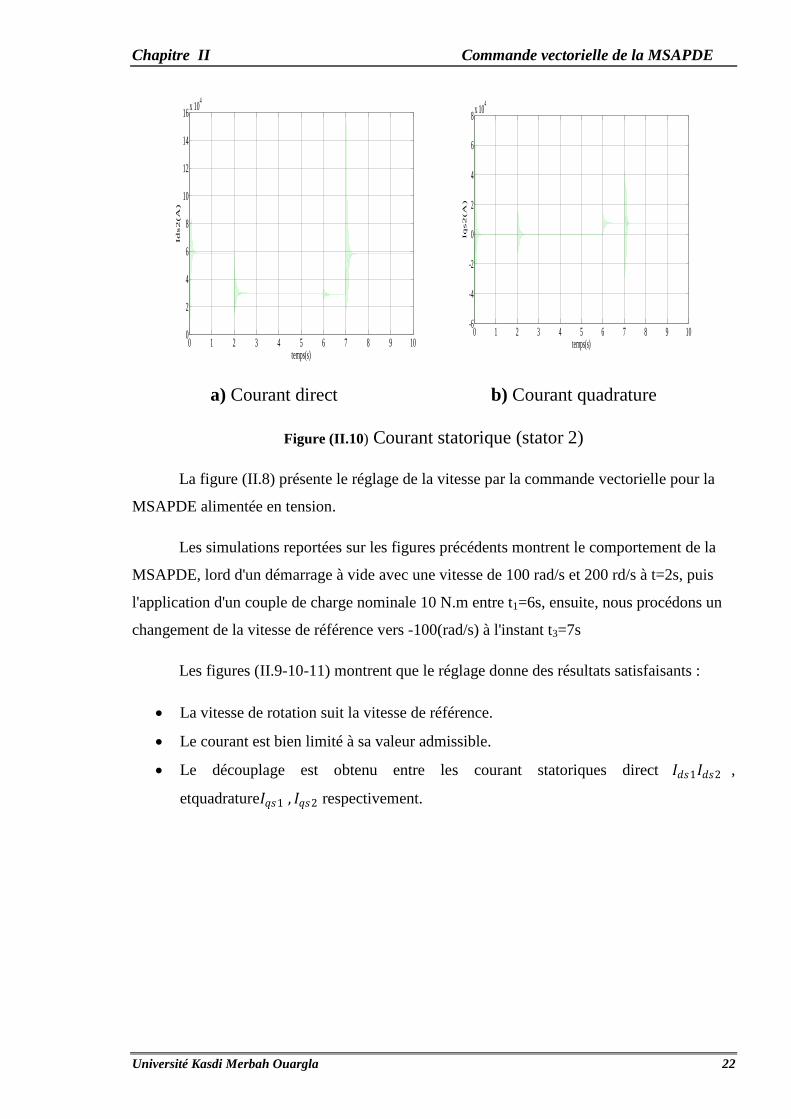
a) Courant direct b) Courant quadrature
Figure (II.10) Courant statorique (stator 2)
La figure (II.8) présente le réglage de la vitesse par la commande vectorielle pour la
MSAPDE alimentée en tension.
Les simulations reportées sur les figures précédents montrent le comportement de la
MSAPDE, lord d'un démarrage à vide avec une vitesse de 100 rad/s et 200 rd/s à t=2s, puis
l'application d'un couple de charge nominale 10 N.m entre t1=6s, ensuite, nous procédons un
changement de la vitesse de référence vers -100(rad/s) à l'instant t3=7s
Les figures (II.9-10-11) montrent que le réglage donne des résultats satisfaisants :
La vitesse de rotation suit la vitesse de référence.
Le courant est bien limité à sa valeur admissible.
Le découplage est obtenu entre les courant statoriques direct 𝐼𝑑𝑠1𝐼𝑑𝑠2 ,
etquadrature𝐼𝑞𝑠1 , 𝐼𝑞𝑠2 respectivement.
0 1 2 3 4 5 6 7 8 9 100
2
4
6
8
10
12
14
16x 10
4
temps(s)
Id
s2
(A
)
0 1 2 3 4 5 6 7 8 9 10-6
-4
-2
0
2
4
6
8x 10
4
temps(s)
Iq
s2
(A
)
Chapitre II Commande vectorielle de la MSAPDE
Université Kasdi Merbah Ouargla 23
II.7. Conclusion
Dans ce chapitre on a vu l'application de la commande vectorielle sur la MSAPDE
cette stratégie qui nous permet de faire un découplage entre le couple et le flux pour assurer
une commande efficace.
Une autre fois on a distingué que les régulateurs classiques (PI) donne toujours des meilleurs
résultats pour un réglage de vitesse et sans dépassement mais l'inconvénient majeur de ses
régulateurs reste la sensibilité pour les changements des paramètres.
Alors, il est préférable de voir d'autre technique de réglage robuste, le régulateur RST est
connus par leur robustesse, qui est le sujet du chapitre suivant.

Chapitre III
Régulateur RST

Chapitre III Régulateur RST
Université Kasdi Merbah Ouargla 24
III.1 Introduction
Avec l’avènement des calculateurs numériques l’utilisation de commandes plus
évoluées tel que les commandes optimales, adaptatives, prédictives a été possible [12].
Un régulateur doit satisfaire aux objectifs généraux de la régulation ainsi qu’aux
contraintes liées au rejet des perturbations. Dans le cas d’un régulateur PI, et à cause du
manque de degré de liberté que nous impose ce dernier, seule la poursuite des références pour
un point de fonctionnement fixe pourra être envisagée.
Dans ce chapitre, nous chercherons à répondre aux contraintes de poursuite et de
régulation de la machine à induction. Les objectifs que nous chercherons à atteindre
concerneront la robustesse en termes de stabilité et de performance. Dans le cas où les
paramètres de la machine sont modifiés, la robustesse en termes de stabilité permet de
conserver la stabilité en boucle fermée, et la robustesse en termes de performances se mesure
au niveau de la rapidité et de la précision de poursuite des références.
Dans cette partie, nous présentons la structure de régulation RST en continu, dans
laquelle les objectifs de poursuite et de régulation seront examinés à travers des tests de
robustesse.
III.2 Structure du régulateur RST
III.2.1 Principe du régulateur
Le Régulateur RST est composé de trois polynômes R(s), S(s) et T(s) définis de
manière à atteindre les objectifs de régulation. La boucle de régulation représentant ce
régulateur peut être décrite par la figure (III.01) [13]:
Chapitre III Régulateur RST
Université Kasdi Merbah Ouargla 25
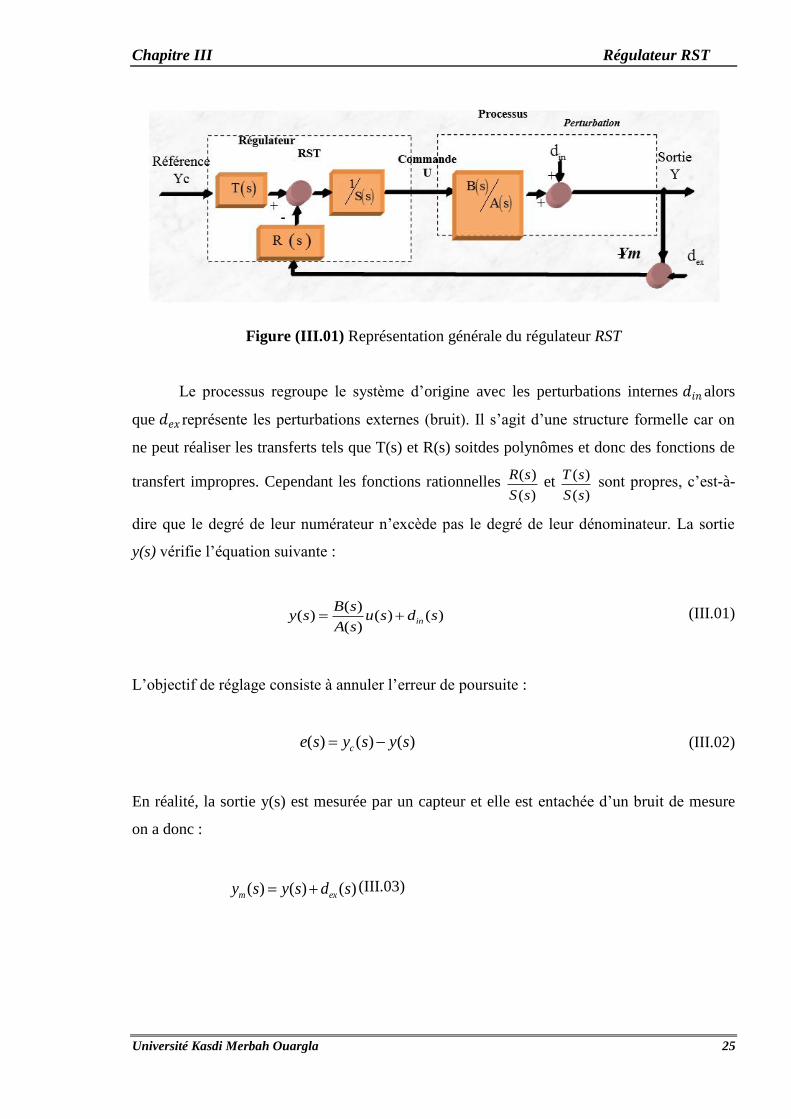
Figure (III.01) Représentation générale du régulateur RST
Le processus regroupe le système d’origine avec les perturbations internes 𝑑𝑖𝑛 alors
que 𝑑𝑒𝑥 représente les perturbations externes (bruit). Il s’agit d’une structure formelle car on
ne peut réaliser les transferts tels que T(s) et R(s) soitdes polynômes et donc des fonctions de
transfert impropres. Cependant les fonctions rationnelles ( )
( )
R s
S s et
( )
( )
T s
S s sont propres, c’est-à-
dire que le degré de leur numérateur n’excède pas le degré de leur dénominateur. La sortie
y(s) vérifie l’équation suivante :
( )( ) ( ) ( )
( )in
B sy s u s d s
A s (III.01)
L’objectif de réglage consiste à annuler l’erreur de poursuite :
( ) ( ) ( )ce s y s y s (III.02)
En réalité, la sortie y(s) est mesurée par un capteur et elle est entachée d’un bruit de mesure
on a donc :
( ) ( ) ( )m exy s y s d s (III.03)

Chapitre III Régulateur RST
Université Kasdi Merbah Ouargla 26
III.2.2 Principe de calcul de régulateur RST
Etant donné un procédé définie par sa fonction de transfert, pour réaliser la synthèse
d’un compensateur afin de rendre la sortie y(s) la plus proche possible d’une référence donnée
pour une certaine classe de consignes c et de perturbation d, on adopte la procédure
suivant[13] :
D’après (III.01), (III.02), (III.03), on a :
m c
ex c
inc ex
c ex in
S( s )u( s ) R( s )y ( s ) T( s )y ( s )
R( s ) y( s ) d ( s ) T( s )y ( s )
A( s ).y( s )-A( s ).d ( s ) T(s)y ( s ) S( s )( ) R( s ) y( s ) d ( s )
B( s )
B( s )T( s )y ( s ) (A( s )S( s ) B( s )R( s ) )y( s ) R( s )B( s )d ( s )-A( s )S( s )d ( s )
(III.04)
D’où la fonction de transfert en boucle fermée :
T.B A.S .y s
(A.S B.R) s (A.S B.R) s (A.S B.R) sc in ex
s s B R sy s d s d s
(III.05)
Où :
A.S
(A.S B.R) s
s
: Fonction de transfert en BO,
T.B
(A.S B.R) s
s
: Fonction de transfert en liant 𝑑𝑖𝑛a y,
.
(A.S B.R) s
B R s
: Fonction de transfert en liant 𝑑𝑒𝑥 ay,
Pour calculer les polynômesS et R on adopte le principe du placement de pôles. Cela
consiste à spécifier un polynôme de stabilité arbitraire D(s) et à calculer les polynômes S(s) et
R(s) de sorte que l’on ait :
𝐷 = 𝐴 𝑠 .𝑆 𝑠 + 𝐵 𝑠 .𝑅(𝑠) (III.06)
Chapitre III Régulateur RST
Université Kasdi Merbah Ouargla 27
Cette équation est dite équation Diophantien, ou équation de Bézout. Si la référence
𝑦𝑐 𝑠 et les perturbations internes 𝑑𝑖𝑛 𝑠 soient de types constants. D’après l’équation (III.01),
la fonction de transfert (𝑦
𝑑𝑖𝑛)(s) sera nulle en régime permanent si nous imposons S(0)=0, S(s)
doit alors être représenté comme suit :
( ) . ( )S s s S s (III.07)
Pour garantir un gain statique unitaire de la fonction de transfert en poursuite (𝑦
𝑦𝑐)(s),
l’équation (III.05) montre qu’il suffit maintenant de choisir un polynôme T(s) qui vérifie la
contrainte T(0)=R(0).On peut remarquer que le polynôme T intervient uniquement dans le
transfert consigne- sortie. Il permet de spécifier le comportement du transfert en poursuite :
𝑌(𝑠)
𝑌𝑐(𝑠)=
𝐵 𝑠 .𝑇(𝑠)
𝐷(𝑠) (III.08)
En d'autres termes, T peut contenir une partie de la dynamique D(s), à cette condition, il est
utile de remarquer aussi que le transfert )(
)(
sR
sT doit être propre.
III.2.3 Résolution de l’équation de Bézout
Il convient d’abord d’analyser les degrés des polynômes du régulateur RST. Le
système d’origine (B(s)/A(s)) et le régulateur (R(s)/S(s)) étant propres, le degré de D(s) est
déterminé par celui du produit (A(s).S(s)), ce qui implique donc)[14]:
𝑑𝑒𝑔 𝐷 = 𝑑𝑒𝑔 𝐴 + 𝑑𝑒𝑔(𝑠) (III.09)
L’égalité des coefficients des polynômes de D(s) dans chacun des deux membres de
l’équation (III.04) se traduira par un système d’équations linéaires, en nombre égal à
(deg(D)+1). Pour que ce système ait une solution, quels que soient les coefficients du
polynôme D(s), il faut que le régulateur présent au moins autant de degrés de liberté que
d’équations. Or, nous disposons de :
Chapitre III Régulateur RST
Université Kasdi Merbah Ouargla 28
deg(R(s)) +1 coefficients pour R(s),
Deg(S(s)) coefficients pour S(s), car S (0) =0.
D’où :
deg(R(s)) +deg(S(s)) +1≥deg(D(s)) +1= deg(A(s))+deg(S(s))+1 (III.10)
On peut en déduit l’inégalité :
deg(R(s)) ≥ deg(A(s)) (III.11)
Afin que la solution soit unique et pour un régulateur propre (deg(S(s)) =deg(R(s)),
nous aurons finalement :
𝑑𝑒𝑔 𝑆 𝑠 = 𝑑𝑒𝑔 𝐴 𝑠 = 𝑛
𝑑𝑒𝑔 𝑅 𝑠 = 𝑑𝑒𝑔 𝐴 𝑠 = 𝑛 (III.12)
𝑑𝑒𝑔 𝐷 = 2𝑑𝑒𝑔(𝐴 𝑠 )
Pour un régulateur strictement propre (deg(S(s))=deg(R(s)) +1), nous aurons
:
𝑑𝑒𝑔 𝑆 𝑠 = 𝑑𝑒𝑔 𝐴 𝑠 + 1 = 𝑛 + 1
𝑑𝑒𝑔 𝑅 𝑠 = 𝑑𝑒𝑔 𝐴 𝑠 = 𝑛 (𝐼𝐼𝐼. 13)
𝑑𝑒𝑔 𝐷 𝑠 = 2𝑑𝑒𝑔 𝐴 𝑠 + 1
Selon le degré choisi du polynôme S(s), nous pouvons alors développer le système
linéaire résultant de l’équation de Bézout soit :
n
nn asassA ........)( 1
1
1
0 1( ) ........n n
nB s b s b s b
n
nn rsrsrsR ........)( 1
10 (III.14)
sssssssS n
nn ........)( 1
1
0
𝐷 𝑠 = 𝑑0𝑆2𝑛+1 + 𝑑1𝑆
2𝑛 + ⋯+ 𝑑2𝑛+1

Chapitre III Régulateur RST
Université Kasdi Merbah Ouargla 29
Alors, l’identité selon les puissances décroissantes de (s), se traduit par le système
linéaire suivant, dit système de Sylvester :
Cette matrice étant une matrice carrée, ce système possède génériquement une solution
et une seule.
III.3. Régulation de la vitesse de type RST
Dans une régulation polynomiale, avec un régulateur RSTappliquée sur la vitesse, et
en considérant le couple de charge comme perturbation, le schéma bloc simplifié du système
de contrôle est représenté par la figure (III.02) :
Figure (III.02) Bloc de régulation de vitesse en boucle fermée

Chapitre III Régulateur RST
Université Kasdi Merbah Ouargla 30
La fonction de transfert en boucle ouverte du système à réguler est :
B s 1FTBO
A s Js f
(III.15)
La fonction de transfert en boucle fermée du système à réguler est :
𝐹𝑇𝐵𝐹 =𝐺
1 + 𝐺𝐻=
𝐵 𝑠
𝑆 𝑠 𝐴 𝑠
1 +𝑅 𝑠 𝐵 𝑠
𝐴 𝑠 𝑆 𝑠
𝐹𝑇𝐵𝐹 =
1
𝑆 𝑠 𝐽𝑠+𝑓
1 +𝑅 𝑠
𝑆 𝑠 𝐽𝑠+𝑓
(III.16)
Avec R, S et T sont les polynômes constituant le contrôleur. Dans notre cas, nous avons [15] :
A s Js f Et B s 1 (III.17)
Le pôle du système est :f
sJ
La fonction de transfert de système à réguler est :
s s s s
s s s s s s s sref r
T B B SC
A S B R A S B R
(III.18)
Par l’application de la procédure de calcule du régulateurs on obtient :
𝐷 𝑠 = 𝐴 𝑠 .𝑆 𝑠 + 𝐵 𝑠 .𝑅 𝑠 = 𝑃𝑑 𝑠 .𝑃𝑓(𝑠)
Les polynômes de S(s) et R(s) sont calculés de manière à obtenir le polynôme
caractéristique D(s) voulu. Le choix des pôles de la boucle fermée doit tenir compte de la
robustesse.
Il y a deux conditions à satisfaire :
• Rejet de la perturbation : D'après l'équation (III.18), la fonction de transfert rC
sera nulle
en régime permanent si nous imposons la contrainte S (0)=0,

Chapitre III Régulateur RST
Université Kasdi Merbah Ouargla 31
• Suivi de la consigne : Pour garantir que le gain statique de la fonction ref
soit égal à
1, l'équation (III.18) montre qu'il suffit de choisir un polynôme T(s) qui vérifie T (0)=R (0).
Nous allons présenter dans cette partie une application concrète pour le calcul de notre
système.
Pd(s) est le polynôme de commande et le Pf(s) est le polynôme de filtrage.
Les degrés des polynômes sont donnés par :
𝑑𝑒𝑔 𝐷 𝑠 = 2𝑛 + 1
𝑑𝑒𝑔 𝑆 𝑠 = 𝑑𝑒𝑔 𝐴 𝑠 + 1 ( 𝐼𝐼𝐼. 19)
𝑑𝑒𝑔 𝑅 𝑠 = 𝑑𝑒𝑔 𝐴 𝑠
On aura : 𝐴 = 𝑎0 + 𝑎1
𝐵 = 𝑏1
𝐷 𝑠 = 𝑑0𝑆3 + 𝑑1𝑆
2 + 𝑑2𝑆1 + 𝑑3
; 𝑅 𝑠 = 𝑟0 + 𝑟1
; 𝑆 𝑠 = 𝑠0𝑠² + 𝑠1𝑠
; 𝑇 = 𝑅 0 = 𝑟1
(III.20)
On obtient :
𝑑𝑒𝑔 𝐴 𝑠 = 1
𝑑𝑒𝑔 𝑅 𝑠 = 𝑑𝑒𝑔 𝐴 𝑠 = 1
𝑑𝑒𝑔 𝑆 𝑠 = 𝑑𝑒𝑔 𝐴 𝑠 + 1 = 2
Pour obtenir une bonne stabilité en régime permanent, nous devons avoir D(0)≠0 et
respecter la relation (III.20) L'équation de Bézout mène à quatre équations avec quatre
inconnues où les coefficients de Dsont liés aux coefficients de polynômes R et S par la
matrice de Sylvester suivante:
dddd
3
2
1
0
=
bba
aaa
1
11
01
0
000
00
00
000
ssss
3
2
1
0
(III.21)
Les coefficients D(s) sont déterminés à partir des pôles choisis de façon arbitraire. La
stratégie de placement des pôles est détaillée dans la première partie de chapitre.
Une étude paramétrique a été réalisée dans l'objectif d'obtenir les coefficients du
polynôme D(s) :
𝐷(𝑠) = 𝐴 𝑠 𝑆 𝑠 + 𝐵(𝑠)𝑅(𝑠)
𝐷(𝑠) = 𝐽𝑆 + 𝐹 . 𝑆0𝑆2 + 𝑆1𝑆 + (𝑟0𝑆 + 𝑟1)
𝐷 𝑠 = 𝐽𝑆. 𝑆0𝑆2 + 𝐽𝑆𝑆1𝑆 + 𝑆0𝑆
2𝐹 + 𝑆1𝑆𝐹 + 𝑟0𝑆 + 𝑟1 (III. 22)

Chapitre III Régulateur RST
Université Kasdi Merbah Ouargla 32
𝐷′𝑠) = 𝐽𝑆0𝑆3 + 𝐽𝑆1 + 𝑆0𝐹 𝑆
2 + 𝑆1𝐹 + 𝑟0 𝑆 + 𝑟1
On a :
𝑑0 = 1 𝑑1 = 0.01𝑑2 = 0.02𝑑3 = 0.03
Alors :
𝐽𝑆0𝑆3 = 𝑑0𝑆
3𝐽𝑆0 = 𝑑0 𝑆0 = 𝑑0/𝐽
𝑆0 =1
𝐽 (III.23)
(𝐽𝑆1 + 𝑆0𝐹)𝑆2 = 𝑑1S² 𝑆1 = 𝑑1 −𝐹
𝐽 1/𝐽
𝑆1 = 𝑑1𝐽 − 𝐹 𝐽. 𝐽 (III.24)
(𝑆1𝐹 + 𝑟0)𝑆 = 𝑑2𝑆
𝑟0 = 𝑑2 − 𝑆1𝐹 (III. 25)
𝑟1 = 𝑑3 (III.26)
𝑆0 =
1
0.0025= 400
𝑆1 = 0.0024
0.0025 2 = 4
𝑟0 = 0.02𝑟1 = 𝑑3 = 0.03
(III.27)
Finalement on peut décrit notre régulateur RST par l’expression suivant :
𝑅 𝑠 = 0.02𝑠 + 0.03
𝑆 𝑠 = 400𝑠² + 4𝑠𝑇 𝑠 = 𝑅 0 = 0.03
Chapitre III Régulateur RST
Université Kasdi Merbah Ouargla 33
III.4. simulation
III.4.1. Schéma block
Figure(II.3) Schéma block du MSAPDE avec régulateur RST
III.4.2Résultats desimulation
III.4.2.1 Tests de poursuit
Afin d'illustrer les performances statiques et dynamiques du contrôle vectoriel par un
régulateur de type RST, on a simulé deux régimes transitoires relatifs à :
On présentera dans cette partie les résultats de simulation de la commande vectorielle
par régulateur RST.
On constate que dans les deux commandes le couple répond instantanément, et la
vitesse garde toujours sa forme et sans aucune déformation et en douceur.
Figure (III.04) Vitesse mécanique
0 1 2 3 4 5 6 7 8 9 10-300
-200
-100
0
100
200
300
400
Temps(s)
Vit
esse
(ra
d/s)

Chapitre III Régulateur RST
Université Kasdi Merbah Ouargla 34
Figure (III.05) Couple électromagnétique
a) Courant direct b) Courant quadrature
Figure (III.06)Courantstatorique (stator 1)
0 1 2 3 4 5 6 7 8 9 10-400
-300
-200
-100
0
100
200
300
400
Temps(s)
Co
up
le (
N.m
)
0 1 2 3 4 5 6 7 8 9 10-4
-2
0
2
4
6
8
10x 10
4
Temps(s)
Id
s1
(A
)
0 1 2 3 4 5 6 7 8 9 10-3
-2
-1
0
1
2
3x 10
4
Temps (s)
Iq
s1
(A
)
Chapitre III Régulateur RST
Université Kasdi Merbah Ouargla 35
a) Courant direct b) Courant quadrature
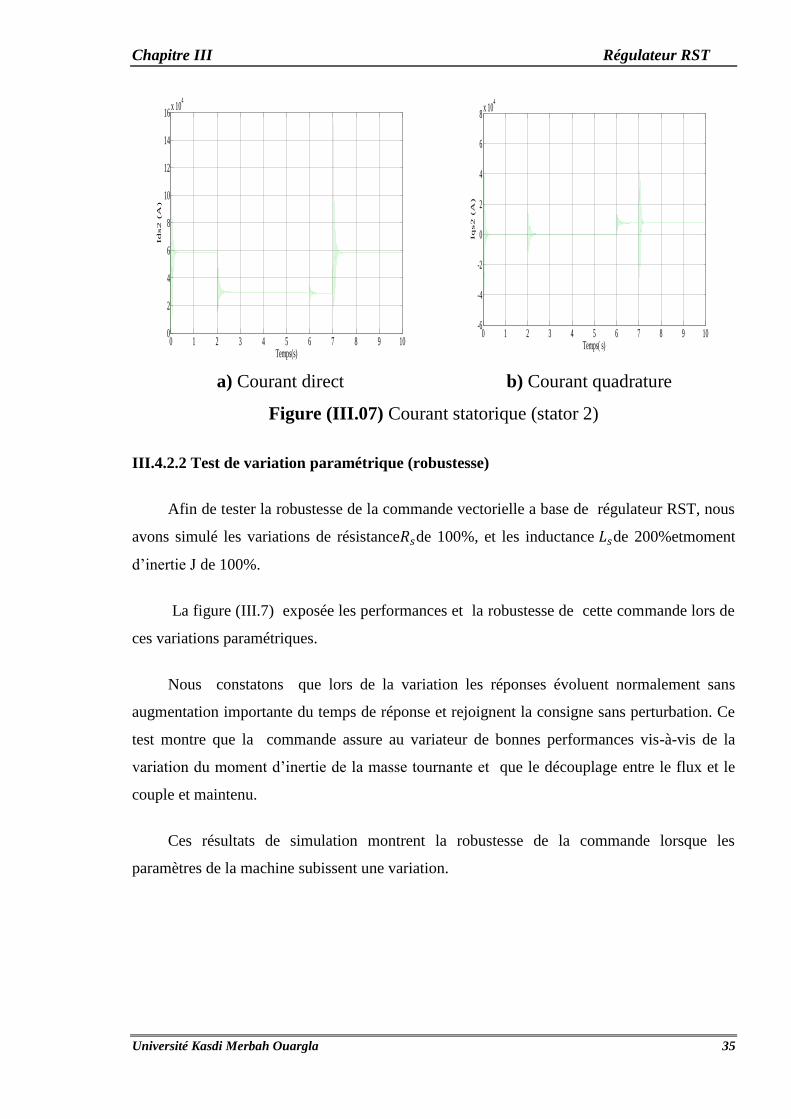
Figure (III.07) Courant statorique (stator 2)
III.4.2.2 Test de variation paramétrique (robustesse)
Afin de tester la robustesse de la commande vectorielle a base de régulateur RST, nous
avons simulé les variations de résistance𝑅𝑠de 100%, et les inductance 𝐿𝑠de 200%etmoment
d’inertie J de 100%.
La figure (III.7) exposée les performances et la robustesse de cette commande lors de
ces variations paramétriques.
Nous constatons que lors de la variation les réponses évoluent normalement sans
augmentation importante du temps de réponse et rejoignent la consigne sans perturbation. Ce
test montre que la commande assure au variateur de bonnes performances vis-à-vis de la
variation du moment d’inertie de la masse tournante et que le découplage entre le flux et le
couple et maintenu.
Ces résultats de simulation montrent la robustesse de la commande lorsque les
paramètres de la machine subissent une variation.
0 1 2 3 4 5 6 7 8 9 100
2
4
6
8
10
12
14
16x 10
4
Temps(s)
Id
s2
(A
)
0 1 2 3 4 5 6 7 8 9 10-6
-4
-2
0
2
4
6
8x 10
4
Temps( s)
Iq
s2
(A
)

Chapitre III Régulateur RST
Université Kasdi Merbah Ouargla 36
a) Comparaison de vitesse
b) Comparaison de couple
c-1)Courant direct c-2) Courant quadrature
c)Courant statorique (stator 1)
0 1 2 3 4 5 6 7 8 9 10-400
-200
0
200
400
Temps(s)
Vit
esse
(ra
d/s
)
Sans variation de Rs,Ls,J
Avec variation de Rs,Ls,J
0 1 2 3 4 5 6 7 8 9 10-400
-200
0
200
400
Temps(s)
Co
up
le (
N.m
)
Sans variation Rs,Ls,J
Avec variation Rs,Ls,J
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10x 10
4
Temps(s)
Id
s1
(A
)
Sans variation de Rs,Ls,J
Avec variation de RS,LS,J
0 1 2 3 4 5 6 7 8 9 10-3
-2
-1
0
1
2
3x 10
4
Temps (s)
Iq
s1
(A
)
Sans variation de Rs,Ls,J
Avec variation de Rs,Ls,J

Chapitre III Régulateur RST
Université Kasdi Merbah Ouargla 37
d-1) Courant direct d-2) Courant quadrature
d) Courant statorique (stator 2)
Figure (II.08)Test de variation (vitesse, couple, courants)
III.5. CONCLUSION
On a présenté dans ce chapitre l’étude et l’application d’une structure de régulation
RST. Cette technique de régulation présente l’avantage de la mise en œuvre très simple,
puisqu’elle repose sur un principe formel de manipulation de polynômes permettant de
déboucher sur des fonctions de transfert faciles à traiter. Cependant, la régulation RST donne
des résultats acceptables mais pas aussi performants.
Cette nouvelle technique de régulation « RST », a permis de répondre aux objectifs
espérés, notamment, le rejet de perturbations, le suivi de consigne et la robustesse de la
stabilité vis-à-vis des variations paramétriques.
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2x 10
5
Temps(s)
Id
s2
(A
)
Sans variation de Rs,Ls,J
Avec variation de Rs,Ls,J
0 1 2 3 4 5 6 7 8 9 10-1
-0.5
0
0.5
1x 10
5
Temps( s)
Iq
s2
(A
)
Sans variation Rs,Ls,J
Avec variation Rs,Ls,J
Conclusion
Conclusion générale
Université Kasdi Merbah Ouargla 38
Conclusion général
Le travail présent dans ce mémoire expose la synthèse d'une technique de régulateur robuste
basée sur le régulateur RST, pour la régulation de la vitesse d'une machine synchrone à
aiment permanant double étoile.
Une étude générale de modélisation de la MSAPDE a été représentée, en se basant sur le
modèle équivalent de PARK, ce modèle met clairement en évidence le couplage qui existe
entre le flux et le couple.
Pour réaliser une commande performance de la MSAPDE, on a introduit une
technique de commande qui permet de commander la machine d'une façon semblable à une
machine à courant continu à excitation séparée ou le découplage entre le flux et le couple est
naturel.
La commande vectorielle de MSAPDE associé à des régulateur PI. Les résultats de
simulation de l'entrainement sont dans l'ensemble acceptables. Cependant, l'inconvénient
majeur de cette technique de commande se manifeste lors des variations paramètres de la
machine, en effet, cette structure de commande nécessite que les paramètres de la machine
soient stables.
Afin d'améliorer la technique de commande choisie, on s'intéresse à étudier et utiliser
la régulateur RST comme une technique qu'on peut associer à cette commande. On remplace
le régulateur conventionnel PI appliqué dans la structure de la commande vectorielle par un
régulateur de type RST, cette stratégie a donné une très bonne performance, ainsi garde une
stabilité vis-à-vis la variation Paramétrique par rapport au PI conventionnel (robustes).

Références bibliographiques

Références bibliographiques
Université Kasdi Merbah Ouargla 39
[1]A.kaddouri, ''Etude d'une commande non-linéaire adaptative d'une machine synchrone à
aimants permanents'', thèse de doctorat, université de laval, Québec, Novembre 2000.
[2] M.I. Hemmami, ''Commande sans capteur de vitesse d'un moteur synchrone à aimant
permanant par l'utilisation de la commande directe du couple et d'un observateur de vitesse à
mode glissant'', Mémoire de Magister, université de Biskra, 2012.
[3] N.S Amirouche, ''Contribution à la commande adaptative et neuronal d'une machine
synchrone à aimants permanents'', thèse de doctorat, Ecole nationale polytechnique, 2007.
[4] M.Guerfi, S.Khirani, ''Régulation de la vitesse d'une MAS par logique floue'', Mémoire
master, université Kasdi Merbah Ouargla. 2011.
[5] A.Arkouk et N.Ait-Atmane,''Etude de l'influence de la sensibilité d'identification des
paramétres électrique et de la mesure de la vitesse sur la commande vectorielle de la MSAP'',
Projet de fin d'étude (ingéniorat), université de Batna, 1996.
[6] T.Rekioua.''Contribution à la modélisation et à la commande vectorielle des machines
synchrones à aimants permanents'', thèse de doctorat de l'INPL, Nancy, 1991.
[7] B.Saint-Jean.''Electrotechniques et machines'', Eyrolles Paris, France et édition LIDEC-
Canada, 1977.
[8] A.Ameur, ''Commande sans capteur de vitesse par DTC d'une machine synchrone à
aimants doté d'un observateur d'ordre complet à mode glissant'', Mémoire de magistèr,
université de Batna, 2003.
[9] C.Bouchereb, ''contrôle direct du couple des machine synchrone '', Mémoire de magistèr,
université de Batna, 2005.
[10] A.R.Boudjema,''Commande vectorielle de la machine synchrone à aimants permanents'',
Mémoire master, Université de Biskra,2014.

Références bibliographiques
Université Kasdi Merbah Ouargla 40
[11]N.Bounasla, ''Commande par mode glissement d'ordre supérieur de la machine synchrone
à aimants permanents'', mémoire master, Université de Sétif, 2014
[12] H.Camblong, ''Minisation de l'impact des perturbations d'origine éloinne dans les
générations d'électricité par des aérogénérateurs à vitesse variable, thèse de doctorat option
automatique de l'école nationale supérieure d'arts et métiers centre de bordeaux, 18 décembre
2003.
[13] M.Aiachi, K.Cherade,''Commande Robuste RST d'une machine Asynchrone'', Mémoire
master, université de Kasdi Merbah.2015.
[14] R.Longchamp ''Commande numérique des systèmes dynamiques'', première édition,
presses polytechniques et universitaires romandes, 1995.
[15] A.KHerrobi et KH. Bensouici, ''Commande de la machine asynchrone avec régulateur
RST'', mémoire master, université Kasdi Merbah Ouargla, 2012.

Annexes
Annexes
Les paramétres de la machine
Rs1=0.0014; résistances statorique 1
Rs2=0.0014; résistances statorique 2
Ls1=39e-6; inductance de stator 1
Ls2=39e-6; inductance de stator 2
J=0.0025;
F=0;
Qr=2.2e-3; flux rotorique
P=2;
f=50; la fréquence
L=[Ls1 0 0 0;0 Ls1 0 0;0 0 Ls2 0;0 0 0 Ls2]
L1=inv(L)
R=[Rs1 0 0 0;0 Rs1 0 0;0 0 Rs2 0;0 0 0 Rs2]
M1=[0 -Ls1 0 0;Ls1 0 0 0;0 0 0 -Ls2;0 0 Ls2 0]
ph=[Qr;0;Qr;0]
ws=wm=2*pi*50 vitesse mécanique
taux=Tr;
Tr=0.02;
segma=0.7
%%%paramétres de régulateur
Kp1=Ls1/taux; coefficient de régulateur de courant stator 1
Kp2=Ls2/taux; coefficient de régulateur de courant stator 2
Ki1=Rs1/taux; coefficient de régulateur de courant stator 1
Ki2=Rs2/taux; coefficient de régulateur de courant stator 2
Kpw=J*(9.5/0.2)-Kf; coefficient de régulateur de vitesse
Kiw=J*(4.75/0.2)^2; coefficient de régulateur de vitesse
T0=Kpw/Kiw;

Résumé
Ce mémoire présente la modélisation et simulation du moteur synchrone à aimant
permanant double étoile. La méthode de commande vectorielle permet de maintenir
parfaitement le découplage entre le couple et le flux, et rendra la machine synchrone a aimant
permanent double étoile similaire à une machine à courant continu, cependant, l régulation PI
donne des résultats acceptables mais pas aussi performances.
Cette nouvelle technique de régulation ''RST '', a permis de répondre aux objectifs
espérés, notamment, le rejet de perturbations, le suivi de consigne et la robustesse de la stabilité
vis-à-vis des variations paramétriques
Mots clés : moteur synchrone à aimants permanent s double étoile , commande vectorielle,
regulateur PI, regulateur RST
Summary
This study, presents the modeling and Simulink of permanent magnet synchronous
machine double star. Amethod field oriented control enabled us to maintain perfectly
decoupling between the couple and flow, and to make the PMSMDS similar to DC machine,
however, the PI regulation gives acceptable but not as good results.
This new technique of regulation called ''RST'', made it possible to answer the
objectives of work, in particular, the rejection of disturbances, the follow-up of instruction and
the robustness of stability with respect to the parametric variations
Key words:permanent magnet synchronous machine double star, field oriented control,
regulator PI, regulator RST.
ممخصتقدم ىذه المذكرة نموذج آلة متزامنة ذات مغناطيس الدائم مزدوجة النجم حيث قمنا بنمذجتيا ومحاكاتيا،
كما مكنتنا طريقة التحكم الشعاعي عمى الحفاظ تماما عمى الفصل بين المزدوجة والتدفق، وجعل اآللة تشبو آلة التيار المستمر، كما ان النتائج كانت مقبولة ولكن ليست اإلجابة عمى اليدف المأمول
جعمت ىذا التحكم أقوى وأنجح عمى وجو الخصوص، رفض االضطرابات، متابعة تعميمات، RSTإن تقنية .ومتانة االستقرار
تقنية , PIتقنية , التحكم الشعاعي , آلة متزامنة ذات مغناطيس الدائم مزدوجة النجم :الكممات المفتاحية RST
Related Documents






![AimAnts PermAnents Aimants ndFeB, AlniCo, smCo et … · NdFeB BLS Magnet [6] Aimants permanents BLS Magnet [7] Aimants permanents AimAnts neODYme Nuance Rémanence Rémanence Intensité](https://static.cupdf.com/doc/110x72/5b915de609d3f210288b829e/aimants-permanents-aimants-ndfeb-alnico-smco-et-ndfeb-bls-magnet-6-aimants.jpg)




