1 CNC-RP: A Rapid Prototyping Method Using Computer Numerical Controlled Machining Matthew C. Frank Industrial and Manufacturing Engineering Iowa State University Richard A. Wysk Industrial and Manufacturing Engineering The Pennsylvania State University

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
CNC-RP: A Rapid Prototyping Method Using Computer
Numerical Controlled Machining
Matthew C. Frank
Industrial and Manufacturing Engineering
Iowa State University
Richard A. Wysk
Industrial and Manufacturing Engineering
The Pennsylvania State University

2
Agenda
• What is RP?
• Limitations of RP
• Economics of RP
• New directions in RP
• Observations and conclusions
2

33
• Prototyping is critically important during product/process design
– Reduce time to market
– Early detection of errors
– Assist concurrent manufacturing engineering
• Prototypes are used to convey a products’:
– Form
– Fit
– Function
• Prototype building can be a time-consuming process requiring a highly skilled craftsperson
– Time spent testing prototypes is valuable
– Time spent constructing them is not…
• “Rapid Prototyping” (RP) methods have emerged
– (Solid Freeform Fabrication, Additive Manufacturing, Layered Manufacturing)
Need for model
accuracy increases
Introduction

4
Stereolithography (SLA)
Stereolithography is a common rapid manufacturing and rapid prototypingtechnology for producing parts with high accuracy and good surface finish. A device that performs stereolithography is called an SLA or Stereolithography Apparatus.
Stereolithography is an additive fabrication process utilizing a vat of liquid UV-curablephotopolymer "resin" and a UV laser to build parts a layer at a time. On each layer, the laser beam traces a part cross-section pattern on the surface of the liquid resin.

5
Selective Laser Sintering (SLS)
SLS can produce parts from a relatively wide range of commercially available powder materials, including polymers (nylon, also glass-filled or with other fillers, and polystyrene), metals (steel, titanium, alloy mixtures, and composites) and green sand. The physical process can be full melting, partial melting, or liquid-phase sintering. And, depending on the material, up to 100% density can be achieved with material properties comparable to those from conventional manufacturing methods. In many cases large numbers of parts can be packed within the powder bed, allowing very high productivity.

6
Fused Deposition Modeling (FDM)
• Fused deposition modeling, which is often referred to by its initials FDM, is a type of rapid prototyping or rapid manufacturing (RP) technology commonly used within engineering design. The technology was developed by S. Scott Crump in the late 1980s and was commercialized in 1990. The FDM technology is marketed commercially by Stratasys Inc.
• Like most other RP processes (such as 3D Printing and stereolithography) FDM works on an "additive" principle by laying down material in layers. A plastic filament or metal wire is unwound from a coil and supplies material to an extrusion nozzle which can turn on and off the flow. The nozzle is heated to melt the material and can be moved in both horizontal and vertical directions by a numerically controlled mechanism, directly controlled by a Computer Aided Design software package. In a similar manner to stereolithography, the model is built up from layers as the material hardens immediately after extrusion from the nozzle.
• Several materials are available with different trade-offs between strength and temperature. As well as Acrylonitrile butadiene styrene (ABS) polymer, the FDM technology can also be used with polycarbonates, polycaprolactone, and waxes. A "water-soluble" material can be used for making temporary supports while manufacturing is in progress. Marketed under the name WaterWorks by Stratasys this soluble support material is actually dissolved in a heated sodium hydroxide solution with the assistance of ultrasonic agitation.

7
Laminated Object Manufacturing
(LOM)
Laminated Object Manufacturing (LOM) is a rapid prototyping system developed by Helisys Inc. (Cubic Technologies is now the successor organization of Helisys) In it, layers of adhesive-coated paper, plastic, or metallaminates are successively glued together and cut to shape with a knife or laser cutter.

8
Electron Beam Melting (EBM)• Electron Beam Melting (EBM) is a type of rapid
prototyping for metal parts. It is often classified as a rapid manufacturing method. The technology manufactures parts by melting metal powder layer per layer with an electron beam in a high vacuum. Unlike some metal sintering techniques, the parts are fully solid, void-free, and extremely strong. Electron Beam Melting is also referred to as Electron Beam Machining.
• High speed electrons .5-.8 times the speed of light are bombarded on the surface of the work material generating enough heat to melt the surface of the part and cause the material to locally vaporize. EBM does require a vacuum, meaning that the workpiece is limited in size to the vacuum used. The surface finish on the part is much better than that of other manufacturing processes. EBM can be used on metals, non-metals, ceramics, and composites.

9
Types of RP Systems
Prototyping Technologies Base Materials
Selective laser sintering (SLS) Thermoplastics, metals powders
Fused Deposition Modeling (FDM) Thermoplastics, Eutectic metals.
Stereolithography (SLA) photopolymer
Laminated Object Manufacturing
(LOM)Paper
Electron Beam Melting (EBM) Titanium alloys
3D Printing (3DP) Various materials

10
Time and Cost to machine

11
Material cost
• In most cases this is independent of the
number of parts
11

12
the time required for setup for an operation (load
fixture, retrieve tooling , etc.)
the time required to load and unload a product
for feature operation j (chuck, fixture, etc..)
the machining/processing time for feature j
tool change time/part
idle time due to scheduling control
L/UL
tj
j
setupt
tj
m
ct
t i
L/UL m c= (tj
setup+ t
j+ t
j+ t
i+ t )tP / nbt
Production time per piece
nbt number of parts per batch

13
• The product cost can be expressed
as:
Production cost per piece, Cp
C CC Cp mo t p/t setup p/t= t p + /n + /n

14
Cmo is the cost of machine and operator/hour
Ct is the perishable tooling cost
np/t is the number of pieces that can be produced per tool
Csetup is the setup resource cost for the part
(fixture, jig, steady-rest, etc)
where

15
Problem Introduction
• Rapid Prototyping?
– Technology for producing accurate parts directly from CAD models in a few hours with little need for human intervention.
– Pham, et al, 1997
• Prototype?– A first full-scale and usually functional form of a new type or
design of a construction (as an airplane)– Webster’s, 1998
• Model?– A representation in relief or 3 dimensions in plaster, papier-mache,
wood, plastic, or other material of a surface or solid– Webster’s, 1986
physical models
How can we automatically create toolpath and fixture plans
for CNC?

16
Engineering cost
CE = Ced / nt + Cpc / nt + Cpd / nb
total parts total parts parts in a batch
16

17
Manufacturing cost
• One time costs– Process planning and design
– Fixture engineering and fabrication
• Set up cost (Cset)– Cost to set up a process
• Processing cost (Cpsc)– Cost of processing a part
• Production cost (Cpdc)– Cost of tooling and perishables
17

18
Manufacturing cost
CM = Cone / nt + Cset / nb + Cpsc + Cpdc // ntool
Total parts parts in a batch each part tool cost by parts/tool
18

19
So how can engineering costs be
reduced for CNC machining?
Machine cost Fixture cost Process planning cost

20
• CNC-RP Method: A part is machined on a 3-Axis mill with a
rotary indexer and tailstock using layer-based toolpaths from
numerous orientations about an axis of rotation.
TableOpposing
3-jaw chucks
Rotary indexer
Round stockEnd mill
Axis of rotation
TableOpposing
3-jaw chucks
Rotary indexer
Round stockEnd mill
Axis of rotation

21
STEPS TO CREATE A PART ( MT. Bike Suspension Component)
1. First orientation of part section is machined
(Side View)
1. First orientation of part section is machined
(Side View) (Side View)
Rotate Stock
2. Second orientation is machined
Rotate StockRotate Stock
2. Second orientation is machined2. Second orientation is machined
3. Third orientation is machined3. Third orientation is machined
4. Fourth orientation is machined4. Fourth orientation is machined4. Fourth orientation is machined

22
STEPS TO CREATE A PART ( MT. Bike Suspension Component)
5. Left support section is machined5. Left support section is machined
6. Right support section is machined6. Right support section is machined
7. Temporary supports are removed7. Temporary supports are removed
8. Part is severed from stock at supports8. Part is severed from stock at supports

23
Finished Steel Part
4”
Finished Steel Part
4”4”4”
Part fixtured with final 2 sacrificial supportsPart fixtured with final 2 sacrificial supports
Material: Steel
Layer depth: 0.001” (0.025mm)
Process/fixture planning time: Minutes
Processing time ~20 hours

24
PROCESSING STEPS
(Side View) Machine the visible surfaces
from each of a set of orientations using
layer-based toolpaths
ROTATE to next orientation
MACHINE
ROTATE
MACHINE
ROTATE
MACHINE
REMOVE model at sacrificial supports
The number of rotations
required to machine a
model is dependent on its
geometric complexity

25
Methodology
• Creation of complex parts using a series of thin layers (slices) of 3-axis toolpaths generated at numerous orientations rotated about an axis of the part
• Toolpath planning based on “layering” methods used by other RP systems
• “Slice” represents visible cross-sectional area to be machined about (subtractive) rather than actual cross section to be deposited (additive)
• Slice thickness is the depth of cut for the 2½-D toolpaths
• Tool used is a flat end mill cutter with equal flute and shank diameter (or shank diameter < flute diameter)
• Stock material will be cylindrical, therefore toolpath z-zero location will be same for all orientations

26
Flat end mill cutter
Methodology (cont.)
“Staircase” effect
Region not visible from
current orientation
Set of visible slices from
current orientation
Toolpath planning using this approach is done with ease in current CAM
software (MasterCAM rough surface pocketing)

27
Methodology (cont.)
• Fixturing accomplished through temporary feature(s) (cylinders)
appended to the solid model prior to toolpath planning
• Cylinders attached to solid model along the axis of rotation
• Incrementally created during machining operation as the model is
rotated
• Model remains secured to stock material then removed (similar to
support structures in current RP methods)

28
Rapid Prototyping• Basics:
– Solid model (CAD) is converted to STL format
• Facetted representation where surface is approximated by triangles
• Intersect the STL model with parallel planes to create cross sections
– Create each cross section, adding on top of preceding one
x
y
z
CAD (ProE) STL “slicing”
operation
2-D cross
section

29
Rapid Prototyping
• Fixtures are created in-process (Sacrificial Supports)
– Secure model to the build platform
– Support overhanging features
• Remove fixture materials in post-process step
Model material
Support material
Build Platform
FDM Model with/without supports

30
RP versus CNC Machining
• RP processes are very flexible and very capable
• However:
– RP processes rely on specialized materials
– Limited accuracy in some cases
• CNC Machining is:
– Subtractive process
– Accurate
– Capable of using many common manufacturing materials
• CNC Machining is NOT:
– Automated
– Easily usable except by highly skilled technicians
• CNC machining cannot create all parts
• No hollow parts
• No severely undercut features
• The time consuming tasks of process and fixture planning are major factors which prohibit CNC machining from being used as a Rapid Prototyping Process
– Wang et al, 1999
Functional prototypes?

31
Previous Work
• Chen and Song, 1991
– Layer based machining for prototyping
– Machined layers using robotic arm/machine tool
– Layers laminated in a stack
• Merz, et al, 1994
– Shape Deposition Manufacturing
– Additive/Subtractive Process
• Walczyk and Hardt, 1998; Vouezelaud et al, 1992
– Rapid tooling
– Laminated machining for dies
• Lennings, 2000
– Deskproto software
– CNC machining planner
– Processes similar to a mill/turn operation

32
Motivation
• RP processes are almost completely automated “turnkey” operations
– User does not have to be skilled technician
– Process planning is simplified by layer-based approach
– Fixtures are created in process
• The approach to CNC-RP will have to relax many of the traditional constraints
– Efficient machining is not a major driver (Traditional feeds/speeds not used)
– Not feature-based (Not necessary to machine entire feature in one setup orientation)
– Surface finish not as critical (Allow staircase effect)
• Goal of this research is to develop a method for CNC rapid prototyping such that:
– Toolpath planning, sequencing, tool sizing is automated
– Fixture design is created in-process, flexible, and allows access to almost all
surfaces
– Setups/orientation automatically calculated, executed
– No collision problems

33
Methodology• Overview:
– Visible surfaces of the part are machined from each orientation about an axis of
rotation
– Long, small diameter flat end tool with equal flute and shank diameter used.
– Sacrificial supports (temporary features) added to the solid model and created in-
process
– Begin with round stock material, clamped between two opposing chucks
• Example:
x
y
z
x
y
z
Toolpath layers at 180º orientation
y
z
Toolpath layers at 0º orientation
y
z

34
Research Problems
• Setup/Orientation
– How many rotations (setup orientations) about the axis of rotation are required?
– Where are they?
• Toolpath planning
– For each orientation, how can we automatically generate toolpaths?
– What diameter and length tools should be used?
– In what order should the toolpaths be executed?
• Fixture planning
– How can we automatically generate sacrificial supports?
– What diameter and length should they be?

35
• A problem of tool accessibility
• Approximated as a problem of visibility (line of sight)
• A Visibility map is generated via a layer-based approach
• Tool access is restricted to directions in the slice plane (2D problem)
• Goal is to generate the data necessary to determine a minimum set of rotations required to
machine the entire surface
Set of segments on a slice visible
from one tool access direction
Determining the number of rotations

36
Approaches to 2D visibility mapping
• Shortest Euclidean paths - Lee and Preparata, 1984
• Convex ropes - Peshkin and Sanderson, 1986
• 2D visibility cones - Stewart, 1999
Issues:
• Computing S.E.P.s/VCs for
polygons with holes
• Granularity of STL files, may
need to add collinear points to
polygon segments
• Would need to retriangulate

37
(a) Visibility for the segment=
[Θa,Θb,]
(b) Visibility for the segment=
[Θa,Θb,], [Θc,Θd,]
Θa Θb
Θc
Θd Θa
Θb
• Visibility for each polygonal chain is determined by calculating
the polar angle range that each segment of the chain can be seen.
• Since there can be multiple chains on each slice, we must consider
the visibility blocked by all other chains.
Solution approach

38
Pi+1
P: ,
S :
Pi+1Pi-1
LCHP RCHP
LCHP RCHP
Pi
Pi
not
visible
• We have a polygon P and its convex hull S
• For any point Pi not on S, the visible range can be found by investigating points from the
adjacent CCW convex hull point to the adjacent CW convex hull point
• These points will be denoted the “left” and “right” convex hull points of Pi, LCHP(Pi) and
RCHP(Pi), respectively.
• It is only necessary to calculate the polar angles from Pi to the points in the set [LCHP,
RCHP], excluding Pi.
• The set is divided into, S1 and S2 where: ],[:2
],[:1
1
1
RCHPPS
PLCHPS
i
i
+
−
Step one: Visibility with respect to own chain

39
•The visible range for a point is bounded by the minimum polar angle from Pi
to points in S1 and the maximum polar angle from Pi to points in S2.
•This is the visible range for the point Pi with respect to the boundary of its
own chain, and is denoted V(Pi).
Where:
](),([)(12
YPMinXPMaxPiV iSY
iSX
∠∠=∈∈
V(Pi)
Pi
V(Pi): [43.82 ,121.31]
S1
S2

40
• Consider the segment defined by points in P, u and v, where:
u: Pi and v: Pi+1
• The intersection of visibility ranges for the points u and v and the 180º range
above the segment define a feasible range of polar angles in which the segment
could be reached.
],[],[],[)( uvvvuuvu LVRVLVRVLVRVVV →∩=∩
LVuLVv RVu
RVv
vu
v+1u-1
vu∠ uv∠
•The sets S1 and S2 are redefined:
•The ends of the visibility range are:
)](),1[(:2
)]1(),([:1
vRCHPvS
uuLCHPS
+
−
)]([)(2
vxMaxuvRVSx
∠=∈
)]([)(1
uyMinuvLVSy∠=
∈

41
Problem Surfaces
(a) RV is outside of the 180º range, (b) Both RV and LV are out of the 180º range, (c)
No visibility due to overlapping, (d) Visibility to the entire segment is not possible
since RV > LV.
(a) (b)
(c) (d)
u v
I1
I2
u v
I1 I2
u v
I1
I2 u vI1
I2
LV
RV
RV
LVRV
LV
RV LV

42
Step two: Visibility blocked by all other chains on the slice
• V( )j* is the visibility with respect to the chain j on which resides,
denoted j*.
• For all obstacle chains , the polar range blocked by the chain is
denoted VB( )j.
• The set of visible ranges for the segment is defined:
• Visibility blocked to the segment is the union of the visibility blocked by
chain j to point u and the visibility blocked by chain j to point v, intersected
with the 180º range above segment
• The set of angles blocked to the segment where:
• The set of angles blocked to points u and v where:
uv uv
( )*\ jJj ∈
uv
∑−=jj
uvVBuvVuvVIS )()()(*
uv
uv
]},[]])([])({[[)( vuuvvVBuVBuvVBjjj
∠∠∩∪=
],[)( uuj LBRBuVB = ],[)(vvj
LBRBvVB =

43
RBu
LBu RBv
LBv
u v
• Considering the condition that
blocked visibility is only for blockage
in the 180º range above the segment,
it can easily be seen that the set:
],[],[],[)( vuvvuuvu LBRBLBRBLBRBVBVB →∪=∪
• RBu is simply the minimum polar
angle from u to all points on the
blocker chain
• LBv is the maximum polar angle from
v to all points on Pj, where Pj is the
set of points for the blocker chain.
)]([ uxMinRBjPx
u ∠=∈
)]([ vyMaxLBjPy
v ∠=∈

44
∑−= jj uvVBuvVuvVIS )()()( *Recall:
•For each segment the collection of visible ranges given in polar angle about the
axis of rotation:
rbababatjkVIS ],,,...[],,[,],,[: 21 ΘΘΘΘΘΘ where: rMAX = n
•From the data in [VIS] we can formulate a set corresponding to the segments visible
from a given angle.
}],[ range, somefor )(){( tjkrbabsatjks VISSEG ∈ΘΘΘ≤Θ≤Θ=Θ
.
.
.
VIS1,1,1 VIS2,1,1
VISt jk
VISqn p
.
.
.
(Θa,Θb)1, (Θa,Θb)2, …(Θa,Θb)n
.
.
.
.
.
.
(Θa,Θb)1, (Θa,Θb)2, …(Θa,Θb)n
(Θa,Θb)1, (Θa,Θb)2, …(Θa,Θb)n
(Θa,Θb)1, (Θa,Θb)2, …(Θa,Θb)n
.
.
.
Θ1 Θ2
Θs
Θ359
.
.
.
SEG1,1 ,1, SEG2,1,1, SEG1 ,5 ,3…
.
.
.
.
.
.
SEG13,1,2, SEG14,1,2, …
SEG tjk. . . .
SEG tjk. . . .
The Minimum Set Cover problem:
Given: A collection of subsets Θs of a finite set SEG (the set of all segments)
Solution: A set cover for SEG, i.e., a subset S’ S such that every element in SEG belongs to at
least one member of Θs for .
⊆
'Ss∈

45
Implementation/Results
• Algorithm implemented in C
• Computation times on a 2.0GHz Pentium 4
320º
49º140º
228º
C.H.
A.C.
Facets
Slice ( in ) #sgmts time( s ) #sgmts time(s ) #sgmts time(s ) #sgmts time( s ) #sgmts time( s )
0.0025 19,566 22.750 27,285 25.812 36,199 29.390 49,975 36.623 69,212 47.122
0.0050 9,772 11.230 13,553 12.875 18,178 14.671 25,044 18.640 34,458 23.389
0.0100 4,850 5.687 6,781 6.515 9,054 7.405 12,476 9.297 17,306 11.843
0.0200 2,375 2.875 3,409 3.312 4,597 3.907 6,269 4.859 8,683 6.281
0.0400 1,182 1.453 1,655 1.718 2,159 2.032 2,974 2.453 4,123 3.141
1990 3686
STL Resolution
865
coarse
0.005"
0.5
1286
xcoarse
0.0075"
0.5
6578
medium
0.0025"
0.5
xfine
0.000625"
0.5
0.00125"
fine
0.5
• Set cover problem solved as integer linear program using LINDO:
The “Jack”…

46
xy
z
x y
z
x
x y
z
y
z
Results (cont)
Cell phone face plate…
Turbine…

47
Toolpath Planning
• Layer based toolpaths
– Machine visible surfaces from approach direction
– 2½-D pocketing, easily generated using current CAM software (MasterCAM,rough surface pocketing)
– A gouge-free approach, given flute and shank diameter are same (or shank < flute)
– Investigated as a rough machining approach - Balasubramanium, 1999
• Can approach finish machining using very small depths of cut
• We assume that tool length, not diameter will be active constraint
– To avoid collision, tool length > maximum swept diameter of part (Same as stock diameter)
– Tool diameter chosen as smallest available for required length (not conventional tools)

48
Toolpath Planning
• Stock diameter/Tool length can be found from slice data used in VISI algorithm
– For each slice, find diameter of the set of points
– Set stock diameter to MAX
– Ds = MAXDIAM(CHP(slice points)) for all slices k
– Set tool length to diameter of the stock Lt = Ds
• Toolpath sequencing is a significant problem
– Need to avoid “thin web” conditions
– Can occur during one toolpath or from successive toolpaths
Depth of cut(max) = -Ds
Where Ds= Stock Diameter
d
Ds = Ds + 2d (1)
Lt = Ds + d (2)
1801 ±±±±ΘΘΘΘ====ΘΘΘΘ
ΘΘΘΘ====ΘΘΘΘ
++++ nn
n

49
Toolpath Planning
nΘΘΘΘ
ΘΘΘΘ±±±±±±±±ΘΘΘΘ
ΘΘΘΘ±±±±±±±±ΘΘΘΘ≠≠≠≠ΘΘΘΘ ++++
)180(
)90(1
d
o
n
d
o
n
n
o
dwhere: 10 ====ΘΘΘΘ
(3)
ΘΘΘΘ====ΘΘΘΘn 901 ±±±±ΘΘΘΘ====ΘΘΘΘ ++++ nn
• Thin material conditions resulting from thru-pocket part geometry:
• For each successive toolpath
planned in sequence, undesirable
orientations to be avoided:

50
Toolpath Planning
• Preparatory toolpath sequence to avoid thin material conditions
• Removes bulk of stock material prior to processing remainder of toolpaths
• Choose from orientations in the solution set, or add new
Model
Remaining stock
material
*Preparatory passes adhere to condition: (3)

51
Fixture Planning
• Approach uses “sacrificial supports” to retain the prototype within the stock material
• Round stock clamped between opposing chucks
• As prototype is rotated b/w toolpaths sacrificial supports are incrementally created
• Supports cut away to remove finished part
• Current approach assumes model surfaces exist along axis of rotation
– Only one fixture support cylinder used on each end
– No change to visibility calculations
Problems:
Where do cylinders begin/end?
What diameter?

52
Fixture Planning
• Start/end of cylinder
– Need to have room for tool diameter to pass b/w end of part and stock
– Cylinder end protruding into the part must be fully “embedded”
• Use slice geometry to calculate depth of penetration where cylinder is fully attached
Part length
Lf
Free fixture length: Lf > Dt
Where Dt = diameter of tool
Pd ?Lf

53
Fixture Planning• Determine first slice where fixture cylinder diameter is contained within the boundary
chain of the part ( Circle with center at axis of rotation )
Slice k=1 (0.005”) Slice k=1 (0.010”) Slice k=1 (0.015”)
Part slice boundary
Fixture cylinder diameter
*
Pd = 0.015”
54
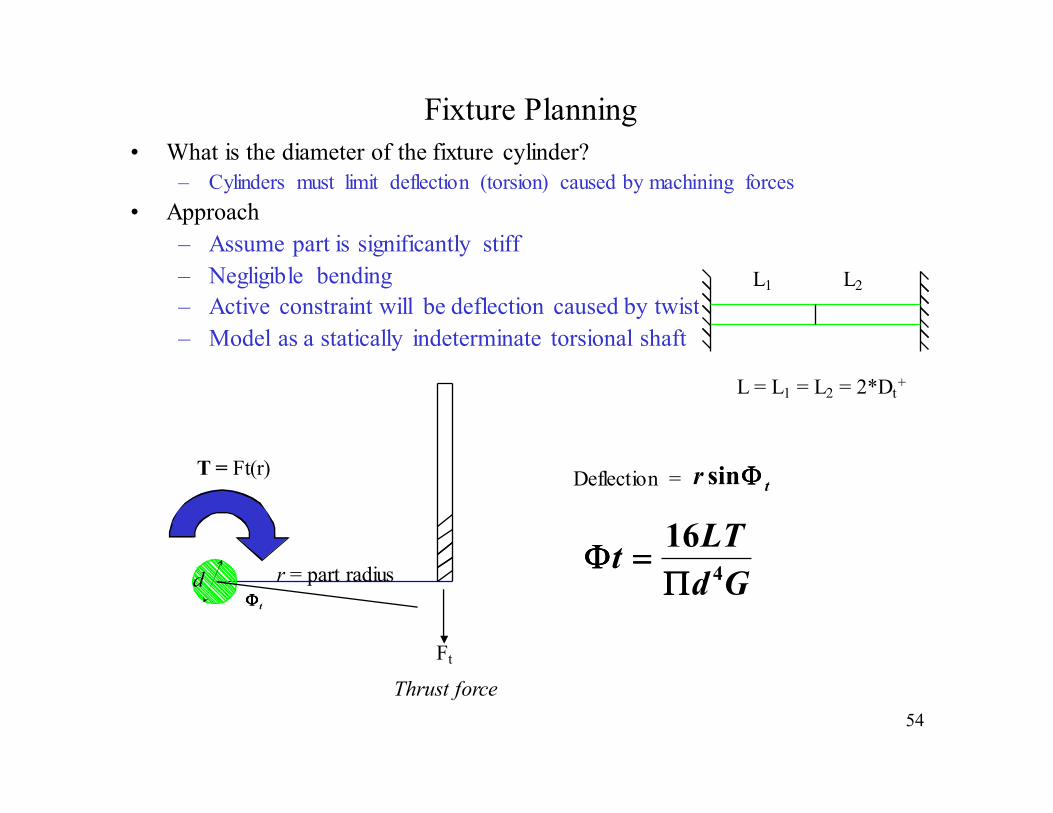
Fixture Planning
• What is the diameter of the fixture cylinder?
– Cylinders must limit deflection (torsion) caused by machining forces
• Approach
– Assume part is significantly stiff
– Negligible bending
– Active constraint will be deflection caused by twisting
– Model as a statically indeterminate torsional shaft
Ft
r = part radius
T = Ft(r)tr ΦΦΦΦsin
tΦΦΦΦsin
Deflection =
d
L1 L2
L = L1 = L2 = 2*Dt+
Thrust force
Gd
LTt
4
16
ΠΠΠΠ====ΦΦΦΦ

55
Fixture Planning• Fixture setup:
– Straightforward to determine work offset location, length of stock
– Ensures collision avoidance Dh
b a
c
a = clamping depth
b = .5Dh - .5(Dt) work offset from jaw face
c = Lp + 2a + 2b + 2Lf
Where: Dh = tool holder diameter, Dt = tool diameter, Lf = free fixture length, Lp = Part length

56
Example- The “Jack”
1”
Material: 6061 Aluminum
Tool: 1/8” Flat end mill
Machine: Haas VF-O, 3-Axis mill
Layer thickness: 0.005”
Speed: 7500rpm, Feed: 350 ipm
Machining time: 3 hours
Prototype after
2 of 4 rotations
Toolpath and Fixture planning time: < 15 minutes!

57

58

59

60

61

62
• Medical RP, one of the major territories for RP application
– Manufacturing of dimensionally accurate physical models of the human anatomy derived from medical image data using a variety of rapid prototyping (RP) technologies
– CNC-RP?
• Typical bio/medical Material
– Titanium
– Stainless steel
– Cobalt alloy
• Advantage of Wire Electric Discharge Machining(WEDM)
– Cut any electrical conductive material regardless hardness
– Ignorable cutting force
– Capable to produce complex part
Satisfy material requirementSatisfy material requirement
Wire EDM Rapid Prototyping

63
• WEDM is different from traditional
machining process
Point contact
• Wire EDM
• Laser
• Waterjet
Linear Surface

64
• Visibility problems are different
– “Can we see it” vs. “Can we access it using a
straight line”
Can we see it?
Tool orientation
Can we access it?
wire orientation

65
Can we make it?
How to make it?
(setup)
How to make it?
(Toolpath, NC code)
Wire EDM RP

66
• Investigate the manufacturability
– Part Geometry
– 6-axis Wire EDM
– Rigid machining part
– No internal through features
• Find the B-axis orientation
– Try to minimize number of B-axis orientation
Can we make it?
How to make it?
(setup)
Wire EDM RP

67
• Toolpath generation
– Discrete Toolpath for B-axis and other 5-axis
– STEP-NC
• Fixture Design
– Ignorable cutting force : Clamp part
How to make it?
(Toolpath, NC code)
Wire EDM RP

68
Sample Prototype
• Prototype: The “Jack”
– 6061 Aluminum
– 1/8” Flat end mill
– 3-Axis HAAS mill
– Speed 7500 rpm, Feed 350 ipm
– Layer thickness 0.005”
– Process time ~3hours
– Process Planning time ~15 minutes
…after 2 rotationsFinished prototype
320º
49º140º
228º

6969
Conclusions
• For prototyping, the process is dominated by engineering
cost
– Product engineering, Process engineering, production engineering
• RP has come a long way
– Usable products
– Process and production engineering coasts are minimal
• Conventional methods are on their way back
– CNC RP
– Wire EDM RP

70
Conclusions -- continued
• The methods developed (CNC-RP and Wire EDM –RP) represent a deliberate approach at making CNC machining usable by engineers and designers, not just machinists
• Capable of producing fully functional prototypes in the appropriate material
• Wide spread availability of CNC machines provides fast, low-cost integration to current product design processes
• Quick changeover from RP to Production setup will enable higher utilization of machines
• The concept of sacrificial supports for CNC machining represents a significant area of basic research that may yield even greater contributions outside of RP

71
References:
• Wang, F.C., L. Marchetti, P.K. Wright, “Rapid Prototyping Using Machining”, SME Technical
Paper, PE99-118, 1999
• Chen, Y.H., Song, Y., “The development of a layer based machining system”, Computer Aided
Design, Vol. 33, pp. 331-342, 2001
• Merz, R., Prinz, F.B., Ramaswami, K., Terk, M., Weiss, L.E., “Shape Deposition Manufacturing”,
Proceedings of the Solid Freeform Fabrication Symposium, University of Texas at Austin, pp. 1-8,
1994
• Walczyk, D.F., Hardt, D.E., “Rapid tooling for sheet metal forming using profiled edge laminations-
design principles and demonstration”, Journal of Manufacturing Science and Engineering,
Transactions of the ASME, Vol. 120, No. 2, pp. 746-754, November 1998
• Vouzelaud, F.A., Bagchi, A. & Sferro, P.F., (1992), Adaptive Laminated Machining for Prototyping
of Dies and Molds, Proceedings of the 3rd Solid Freeform Fabrication Symposium, pp. 291-300,
August 1992
• Lennings, L., “Selecting Either Layered manufacturing or CNC machining to build your prototype”,
SME Technical Paper, Rapid Prototyping Association, PE00-171, 2000
• Peshkin, M.A., Sanderson, A.C., “Reachable Grasps on a Polygon: The Convex Rope Algorithm”,
IEEE Journal of Robotics and Automation, Vol. RA-2, No. 1, March 1986
• Lee, D. T., Preparata, F. P., "Euclidean Shortest Paths in the Presence of rectilinear Barriers",
Networks, Vol. 14, No. 3, pp. 393-410, 1984.
• Stewart, J.A., “Computing visibility from folded surfaces”, Computers and Graphics, Vol. 23, No. 5,
pp. 693-702, 1999
• Balasubramaniam, M., “Tool Selection and Path Planning for 3-Axis Rough Cutting”, Thesis,
Department of Mechanical Engineering, The Massachusetts Institute of Technology, June 1999
• Tang, K., Woo, T.C., Gan, J., “Maximum Intersection of Spherical Polygons and Workpiece
Orientation for 4- and 5-Axis Machining”, Journal of Mechanical Design, Vol. 114, pp. 477-485,
September 1992
Related Documents











