1 CINEMÀTICA DE LES VIBRACIONS ✔ MOVIMENT HARMÒNIC SIMPLE ✔ SUPERPOSICIÓ DE M.H.S. ✔ MOVIMENT PERIÒDIC ✔ MAGNITUDS

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
1
CINEMÀTICA DE LES VIBRACIONS
✔ MOVIMENT HARMÒNIC SIMPLE
✔ SUPERPOSICIÓ DE M.H.S.
✔ MOVIMENT PERIÒDIC
✔ MAGNITUDS

2
MOVIMENT HARMÒNIC SIMPLE
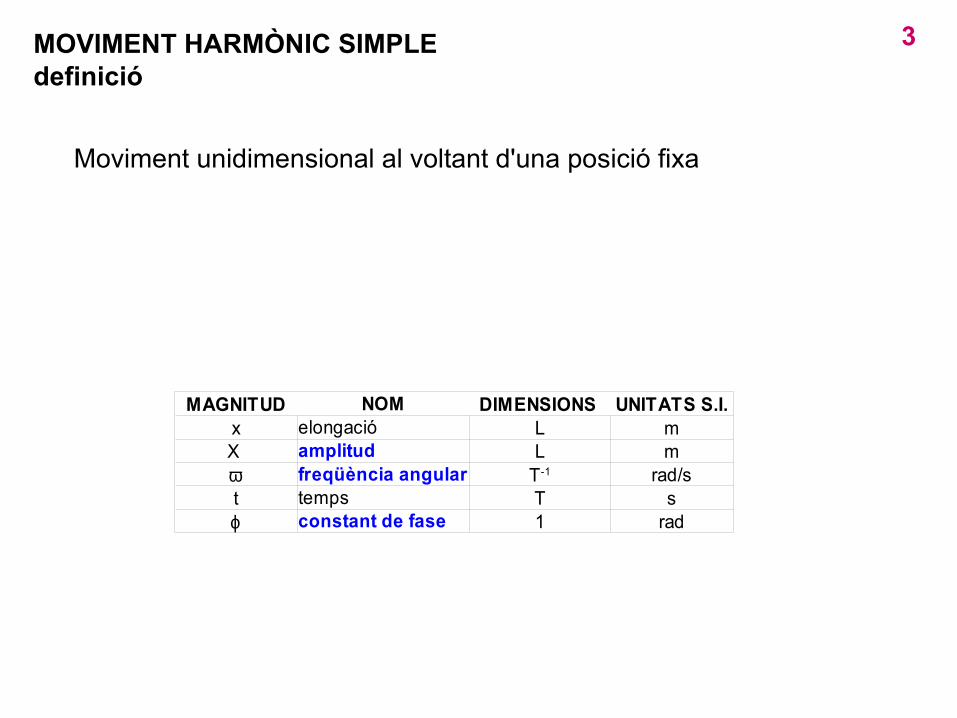
3MOVIMENT HARMÒNIC SIMPLEdefinició
Moviment unidimensional al voltant d'una posició fixa
MAGNITUD NOM DIMENSIONS UNITATS S.I.x elongació L mX amplitud L mω freqüència angular rad/st temps T sϕ constant de fase 1 rad
T-1
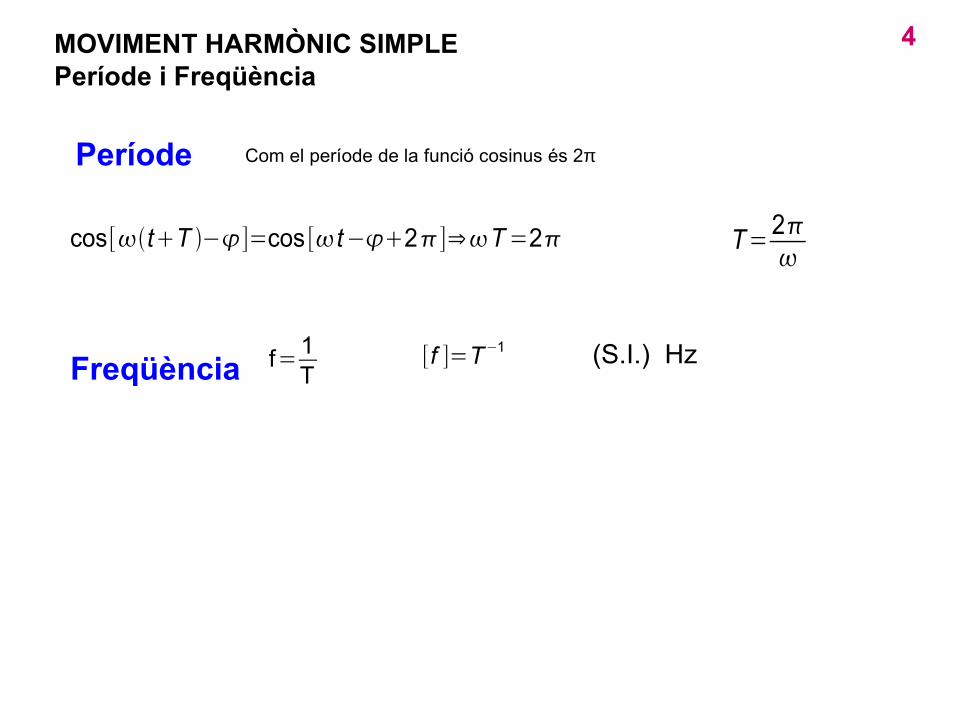
4MOVIMENT HARMÒNIC SIMPLEPeríode i Freqüència
Període
T= 2
Freqüència
Com el període de la funció cosinus és 2π
cos[tT −]=cos [ t−2]⇒T=2
[f ]=T−1 (S.I.) Hzf=1T
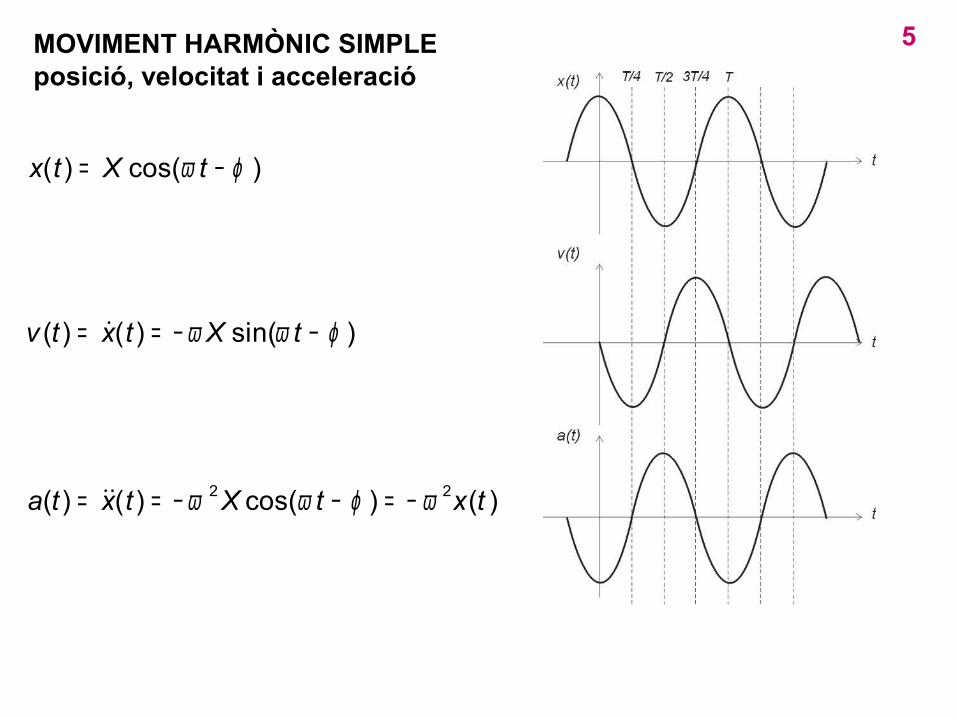
5MOVIMENT HARMÒNIC SIMPLEposició, velocitat i acceleració
)()cos()()(
)sin()()(
)cos()(
22 txtXtxta
tXtxtv
tXtx
ωϕωω
ϕωω
ϕω
−=−−==
−−==
−=
6EXEMPLE 1
Un moviment harmònic té una amplitud de 0,20 cm i un període de 0,15 s
Trobeu la màxima velocitat i acceleració. (Sol: 8.38 cm/s; 3.51 m/s2)
7EXEMPLE 2
• Un acceleròmetre indica que una estructura està vibrant harmònicamenta 82 cicles/s. amb una acceleració màxima de 50g. Trobeu l’amplitud dela vibració. (Sol: 1.85 mm)
8EXEMPLE 3
• Es mesuren la màxima amplitud i acceleració dels fonaments d'unabomba centríguga i es troba que valen xmax = 0.25 mm i amax = 0.4g.Determineu la velocitat de funcionament de la bomba. (Sol: 1196 rpm)
9EXEMPLE 4
• Un moviment harmònic té una freqüència de 10 cicles/s. i la sevavelocitat màxima és de 4,57 m/s. Trobeu l’amplitud, el període, il’acceleració màxima. (Sol: 7.27 cm; 0.1 s; 29.3g)
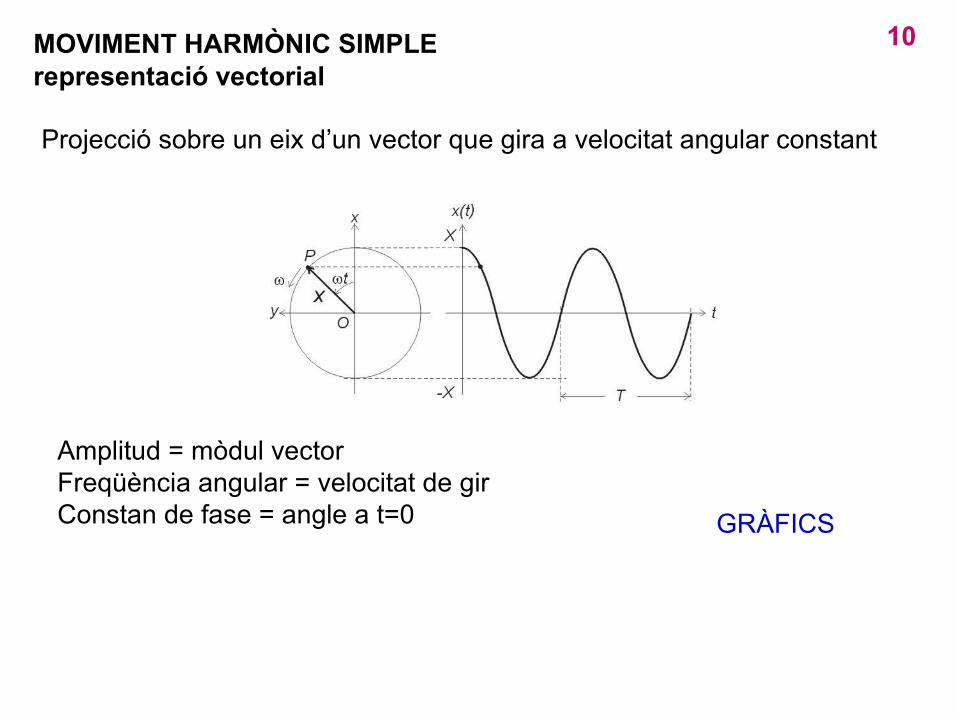
10MOVIMENT HARMÒNIC SIMPLErepresentació vectorial
Projecció sobre un eix d’un vector que gira a velocitat angular constant
Amplitud = mòdul vectorFreqüència angular = velocitat de girConstan de fase = angle a t=0 GRÀFICS

11
SUPERPOSICIÓ DE MOVIMENTS HARMÒNICS SIMPLES
12
AMPLIACIÓ DE FÍSICACINEMÀTICA DE LES VIBRACIONS
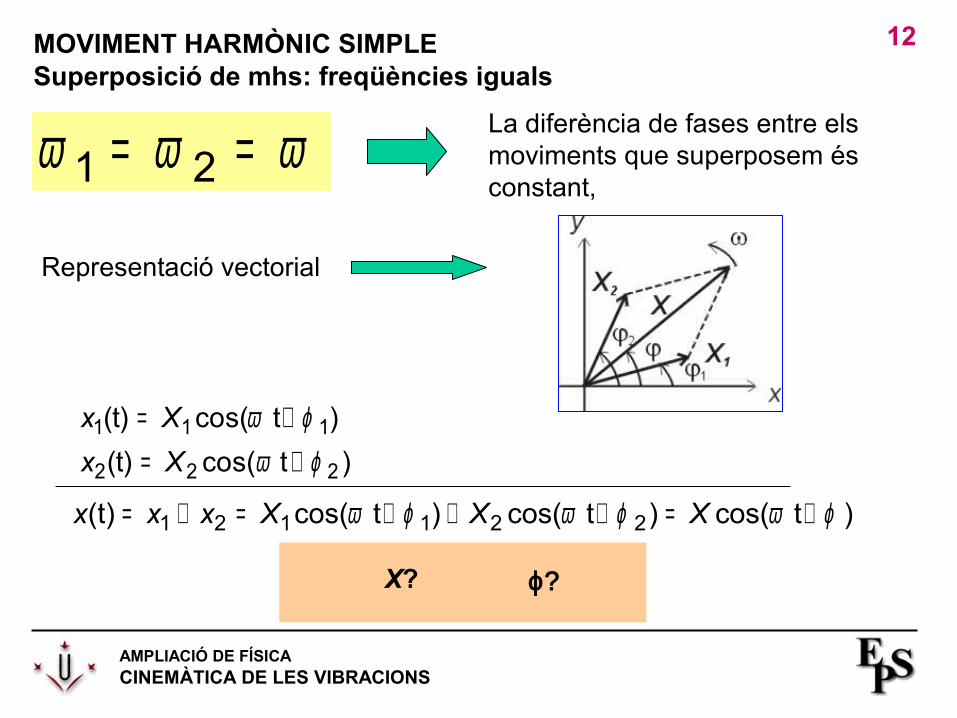
MOVIMENT HARMÒNIC SIMPLESuperposició de mhs: freqüències iguals
ωωω == 21La diferència de fases entre els moviments que superposem és constant,
)tcos((t))tcos((t)
222
111
ϕωϕω
+=+=
XxXx
)tcos()tcos()tcos((t) 221121 ϕωϕωϕω +=+++=+= XXXxxx
Representació vectorial
X? ϕ?
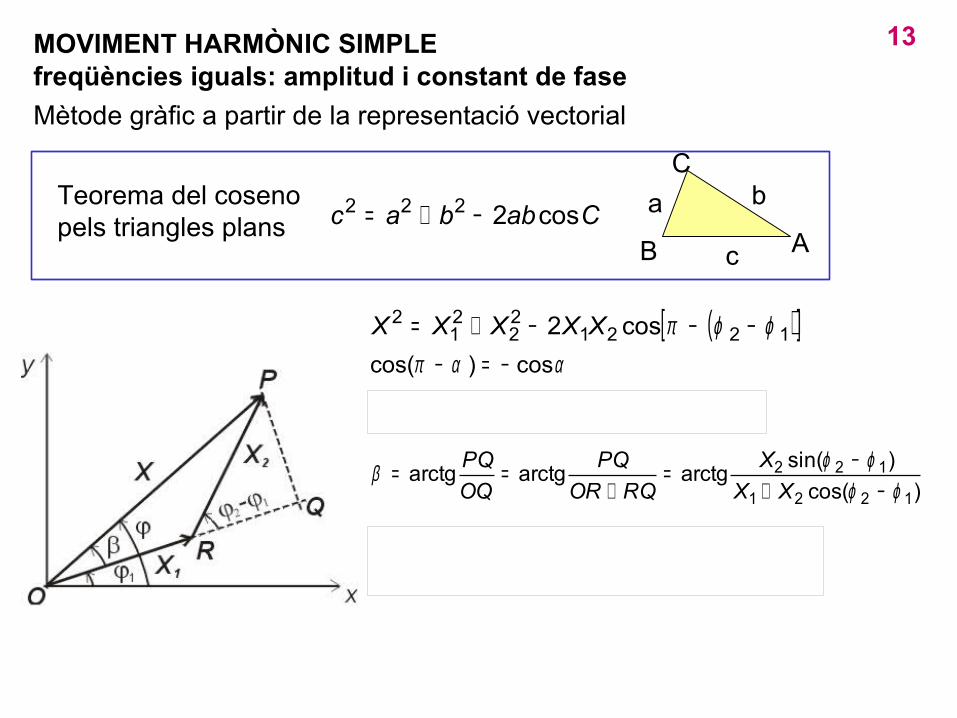
13MOVIMENT HARMÒNIC SIMPLEfreqüències iguals: amplitud i constant de faseMètode gràfic a partir de la representació vectorial
ααπ cos)cos( −=−
( )[ ]122122
21
2 cos2 ϕϕπ −−−+= XXXXX
)cos()sin(arctgarctgarctg
1221
122ϕϕ
ϕϕβ−+
−=+
==XX
XRQOR
PQOQPQ
Teorema del coseno pels triangles plans
a b
c AB
C
Cabbac cos2222 −+=
14ANIMACIÓ GRÀFICA SUPERPOSICIÓ M.H.S.
SUPERPOSICIÓ M.H.S.
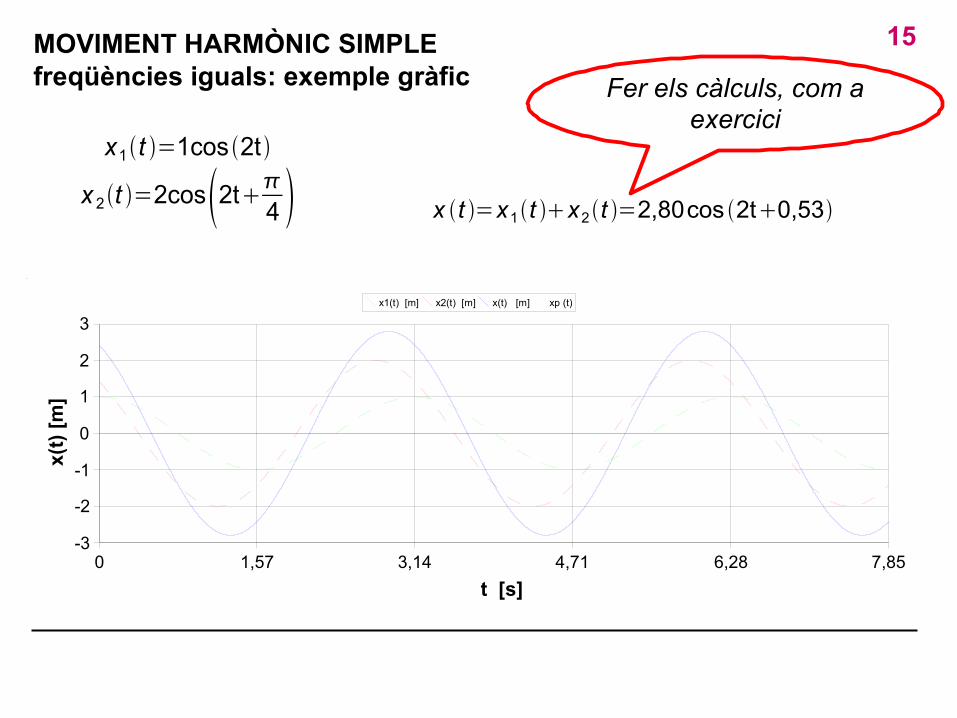
15MOVIMENT HARMÒNIC SIMPLEfreqüències iguals: exemple gràfic
x1t =1cos2t
x 2t =2cos2t4 x t =x1t x2t =2,80cos 2t0,53
0 1,57 3,14 4,71 6,28 7,85-3
-2
-1
0
1
2
3x1(t) [m] x2(t) [m] x(t) [m] xp (t)
t [s]
x(t)
[m]
Fer els càlculs, com a exercici
16EINA PER A CÀLCUL DE SUPERPOSICIONS DE M.H.S.
EXEMPLE 5
Trobeu l'expressió del moviment resultant de la superposició dels moviments :
x1t =2 cos3t
x2t =cos3t/6
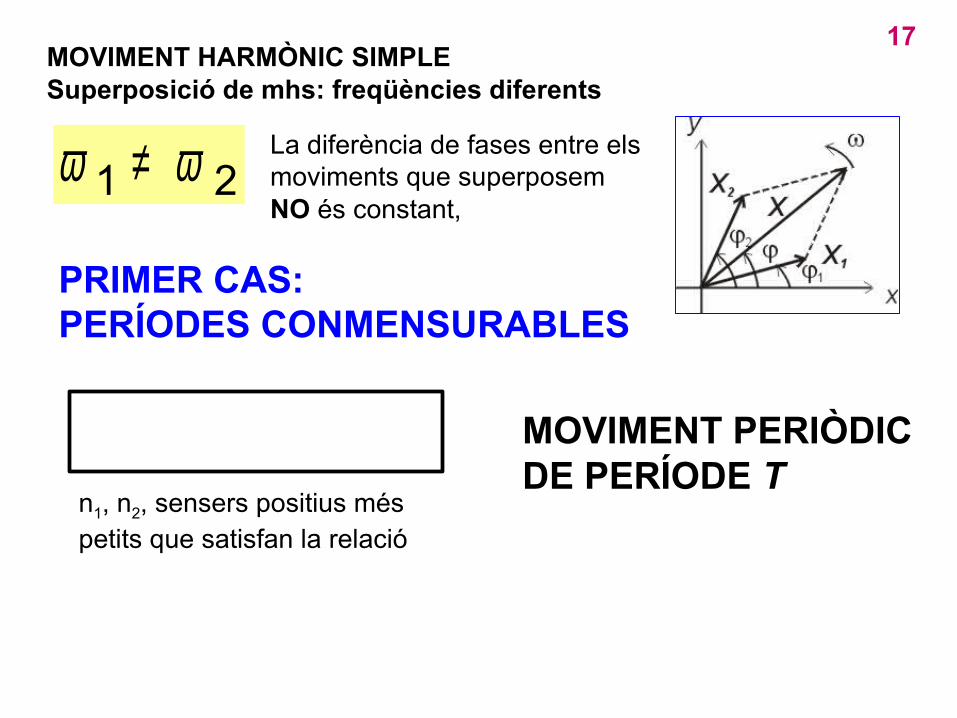
17MOVIMENT HARMÒNIC SIMPLESuperposició de mhs: freqüències diferents
ω 1 ≠ ω 2La diferència de fases entre el
s
moviments que superposemNO és constant,
n1, n2, sensers positius més petits que satisfan la relació
PRIMER CAS:PERÍODES CONMENSURABLES
MOVIMENT PERIÒDIC DE PERÍODE T
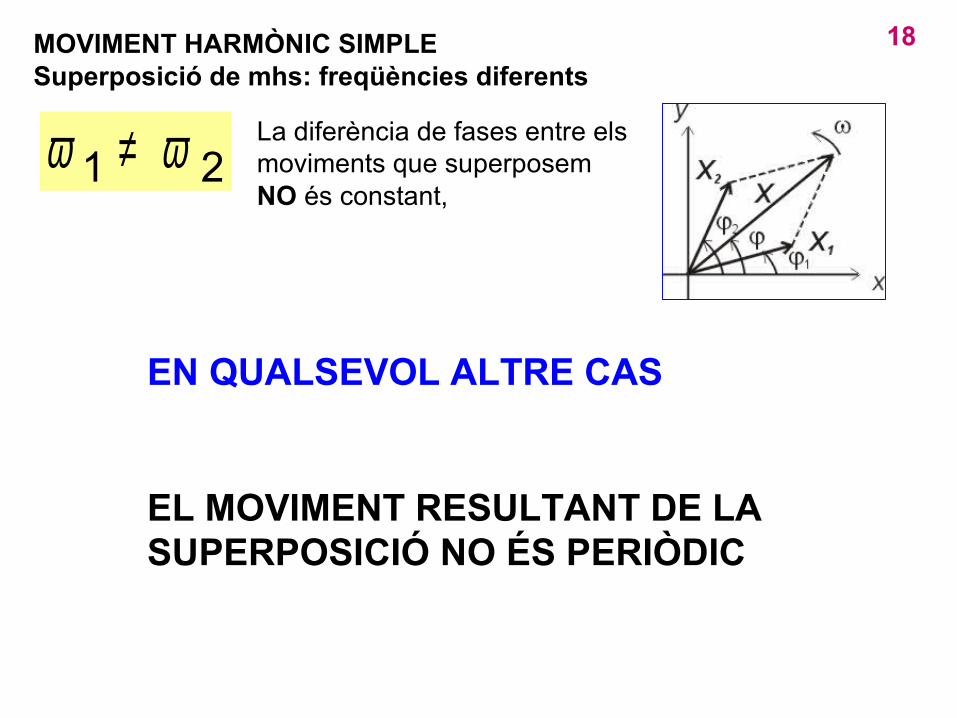
18MOVIMENT HARMÒNIC SIMPLESuperposició de mhs: freqüències diferents
21 ωω ≠ La diferència de fases entre elsmoviments que superposem NO és constant,
EN QUALSEVOL ALTRE CAS
EL MOVIMENT RESULTANT DE LA SUPERPOSICIÓ NO ÉS PERIÒDIC
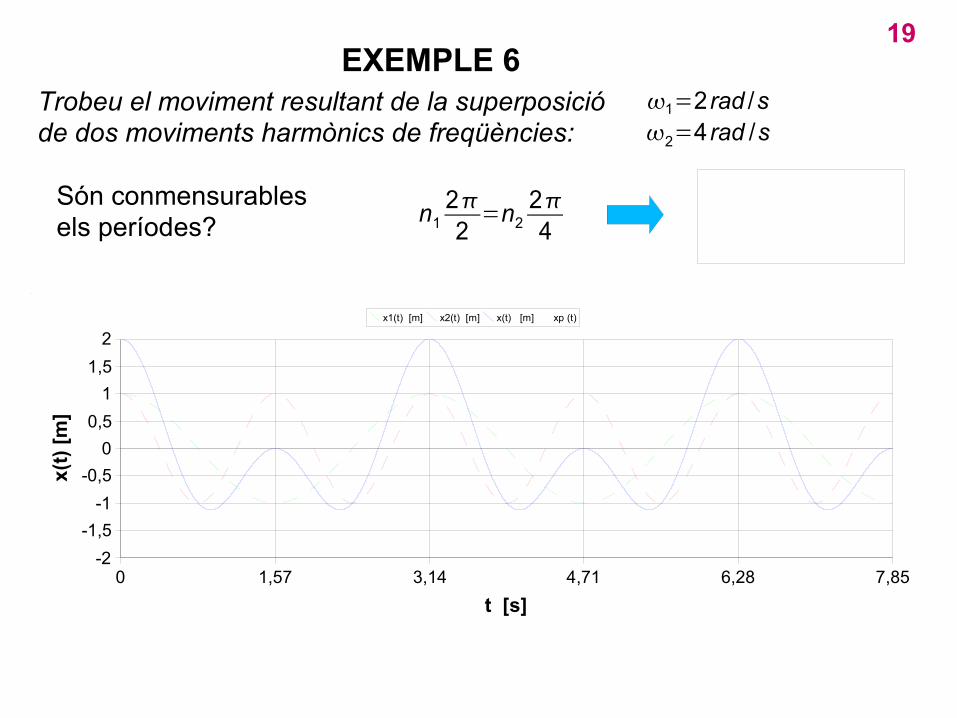
19
1=2 rad /s2=4 rad /s
n122
=n224
0 1,57 3,14 4,71 6,28 7,85-2
-1,5-1
-0,50
0,51
1,52
x1(t) [m] x2(t) [m] x(t) [m] xp (t)
t [s]
x(t)
[m]
Trobeu el moviment resultant de la superposició de dos moviments harmònics de freqüències:
Són conmensurables els períodes?
EXEMPLE 6
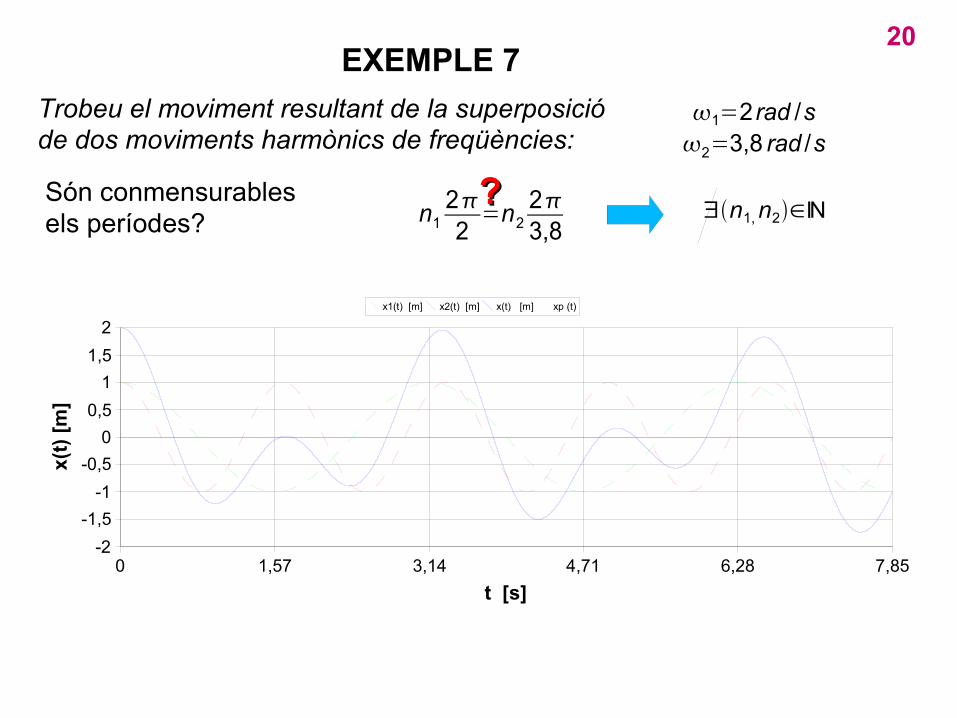
20
1=2 rad /s2=3,8 rad /s
0 1,57 3,14 4,71 6,28 7,85-2
-1,5-1
-0,50
0,51
1,52
x1(t) [m] x2(t) [m] x(t) [m] xp (t)
t [s]
x(t)
[m]
Trobeu el moviment resultant de la superposició de dos moviments harmònics de freqüències:
Són conmensurables els períodes? n1
22
=n223,8
?? ∃n1, n2∈ℕ
EXEMPLE 7
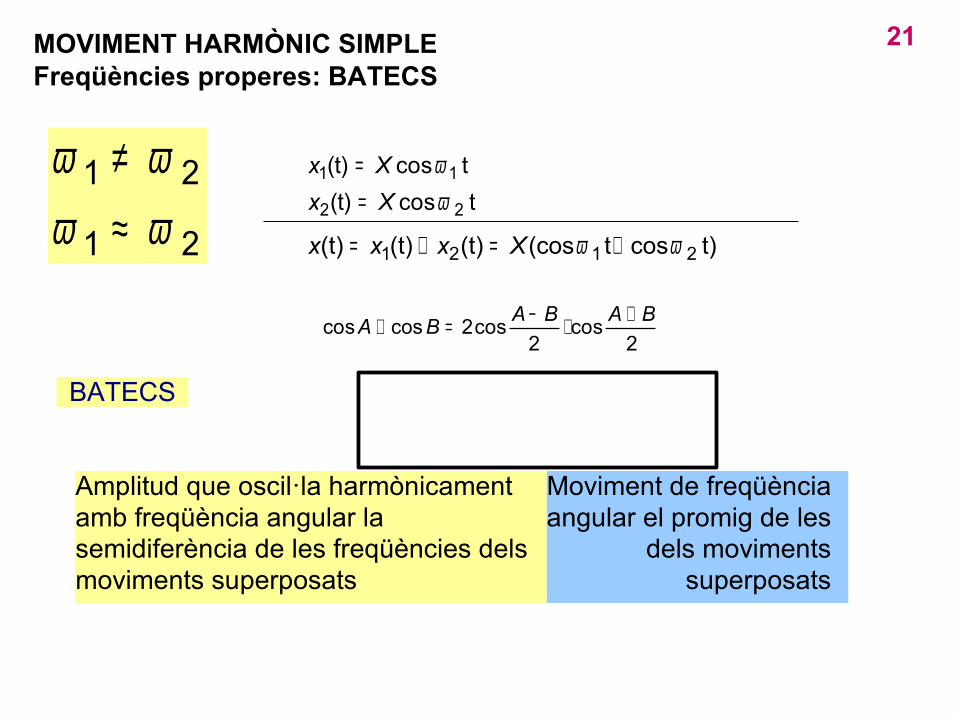
21MOVIMENT HARMÒNIC SIMPLEFreqüències properes: BATECS
21
21
ωωωω
≈≠
tcos(t)tcos(t)
22
11
ωω
XxXx
==
t)cost(cos(t)(t)(t) 2121 ωω +=+= Xxxx
2cos
2cos2coscos BABABA +⋅−=+
Moviment de freqüència angular el promig de les
dels moviments superposats
Amplitud que oscil·la harmònicament amb freqüència angular la semidiferència de les freqüències dels moviments superposats
BATECS
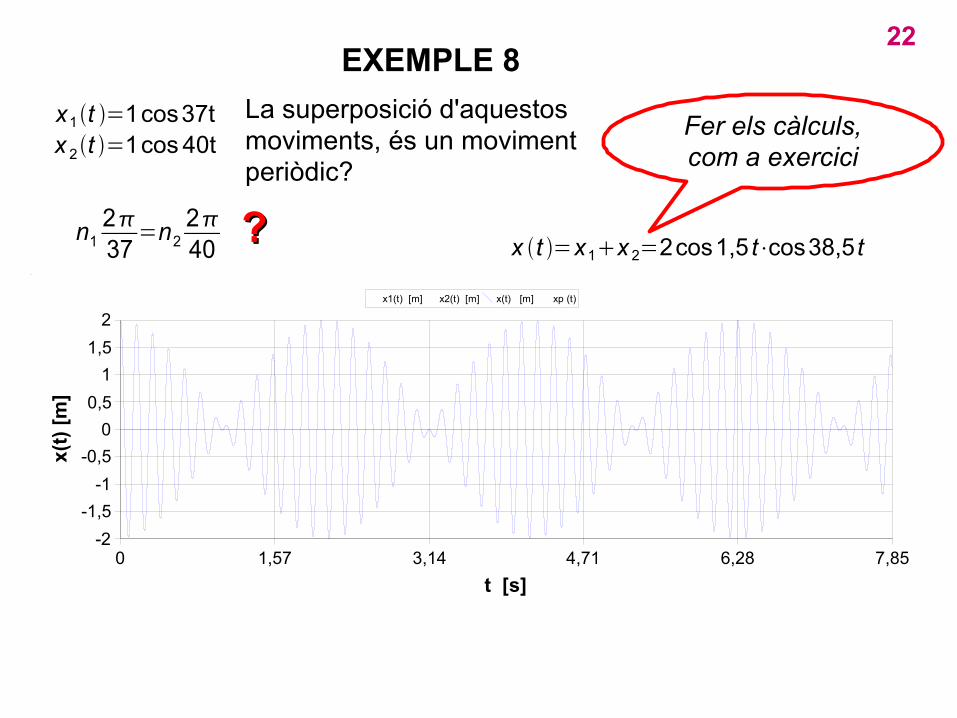
22
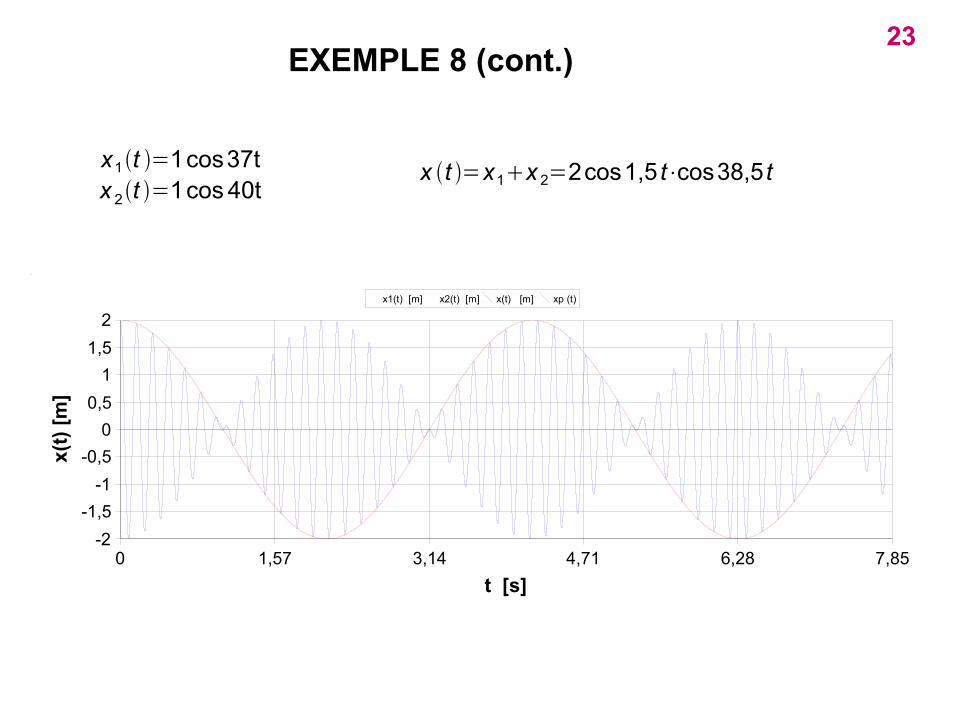
x1t =1cos37tx 2t =1cos 40t
x t =x1x 2=2cos1,5 t⋅cos38,5 t
0 1,57 3,14 4,71 6,28 7,85-2
-1,5-1
-0,50
0,51
1,52
x1(t) [m] x2(t) [m] x(t) [m] xp (t)
t [s]
x(t)
[m]
EXEMPLE 8La superposició d'aquestos moviments, és un moviment periòdic?
n1237
=n2240 ??
Fer els càlculs, com a exercici
23
x1t =1cos37tx 2t =1cos 40t
x t =x1x 2=2cos1,5 t⋅cos38,5 t
0 1,57 3,14 4,71 6,28 7,85-2
-1,5-1
-0,50
0,51
1,52
x1(t) [m] x2(t) [m] x(t) [m] xp (t)
t [s]
x(t)
[m]
EXEMPLE 8 (cont.)
INRODUCCIÓ ALS SISTEMES VIBRANTS
– Elements dels sistemes vibrants–
– efecte de la gravetat– equació del moviment– freqüència natural del sistema– condicions inicials– representació vectorial
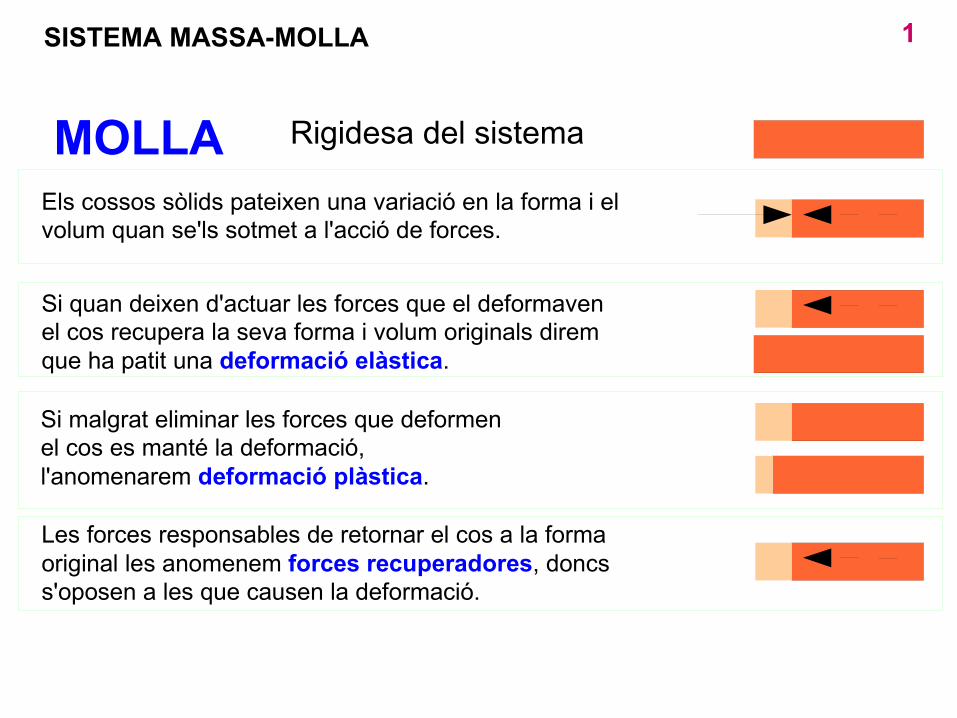
1SISTEMA MASSA-MOLLA
Rigidesa del sistema
Els cossos sòlids pateixen una variació en la forma i el volum quan se'ls sotmet a l'acció de forces.
Les forces responsables de retornar el cos a la forma original les anomenem forces recuperadores, doncs s'oposen a les que causen la deformació.
Si malgrat eliminar les forces que deformen el cos es manté la deformació, l'anomenarem deformació plàstica.
Si quan deixen d'actuar les forces que el deformaven el cos recupera la seva forma i volum originals direm que ha patit una deformació elàstica.
MOLLA
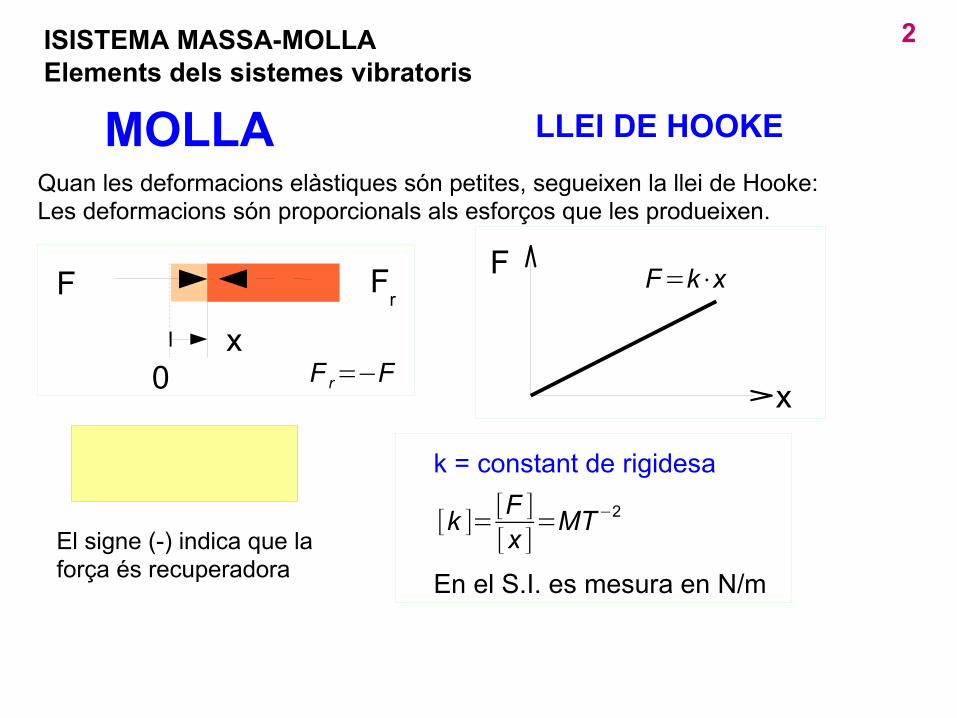
2ISISTEMA MASSA-MOLLA Elements dels sistemes vibratoris
LLEI DE HOOKEQuan les deformacions elàstiques són petites, segueixen la llei de Hooke:Les deformacions són proporcionals als esforços que les produeixen.
MOLLA
F Fr
x0
F
x
F=k⋅x
F r=−F
k = constant de rigidesa
El signe (-) indica que la força és recuperadora
[k ]=[F ][x ]
=MT−2
En el S.I. es mesura en N/m
3SISTEMA MASSA-MOLLA Elements dels sistemes vibratoris
Enmagatzema l'energia potencial, elàstica, del sistema E p=12k x2
És un element tal que quan es modifica la seva longitud natural, apareix en els seus extrems una força recuperadora que segueix la llei de Hooke.
MOLLA
L'element molla és un element ideal.
NO TÉ MASSA
4SISTEMA MASSA-MOLLA Elements dels sistemes vibratoris
Element que dissipa l'energia del sistema
AMORTIDOR
Estudiarem tres tipus d'amortiment:
• Amortiment viscós o fluïd• Amortiment de Coulomb o sec• Amortiment estructural
5ELS SISTEMES VIBRANTS efecte de la gravetat
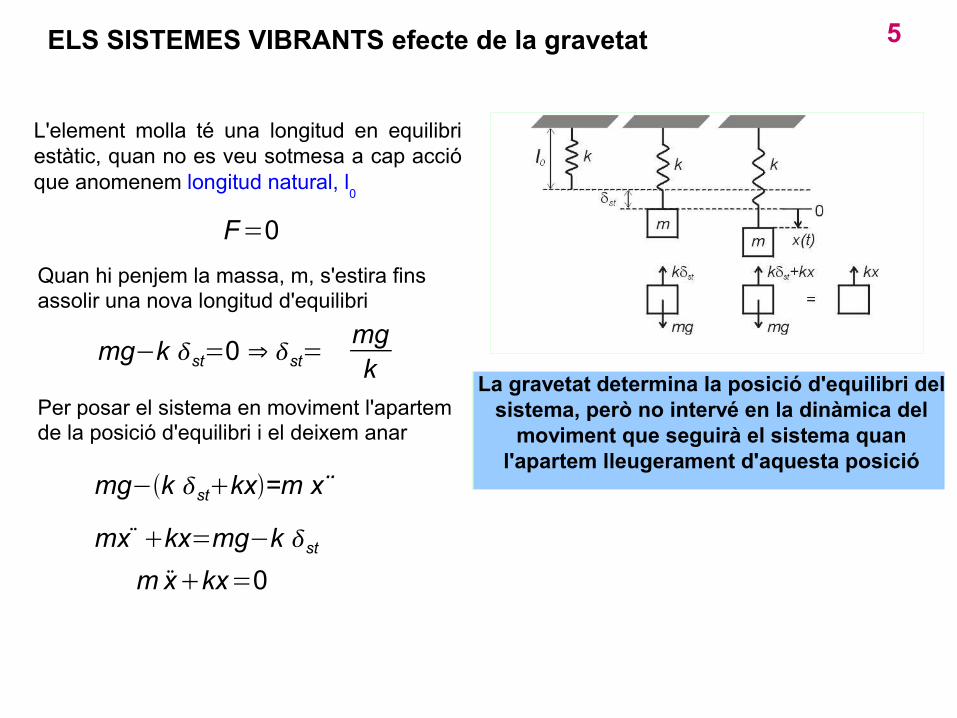
L'element molla té una longitud en equilibri estàtic, quan no es veu sotmesa a cap acció que anomenem longitud natural, l
0
Quan hi penjem la massa, m, s'estira fins assolir una nova longitud d'equilibri
F=0
mg−k st=0 ⇒ st=mgk
Per posar el sistema en moviment l'apartem de la posició d'equilibri i el deixem anar
mg−k stkx=m x¨
mx¨ kx=mg−k stm xkx=0
La gravetat determina la posició d'equilibri del sistema, però no intervé en la dinàmica del
moviment que seguirà el sistema quan l'apartem lleugerament d'aquesta posició
6
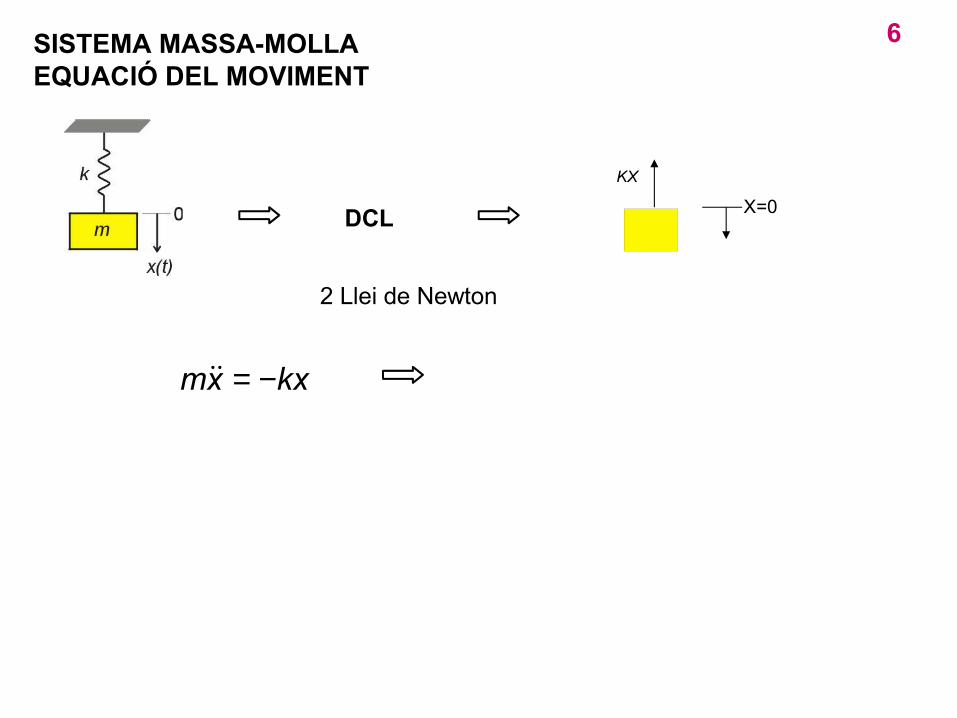
kxxm −=
SISTEMA MASSA-MOLLAEQUACIÓ DEL MOVIMENT
DCL X=0
KX
2 Llei de Newton
7
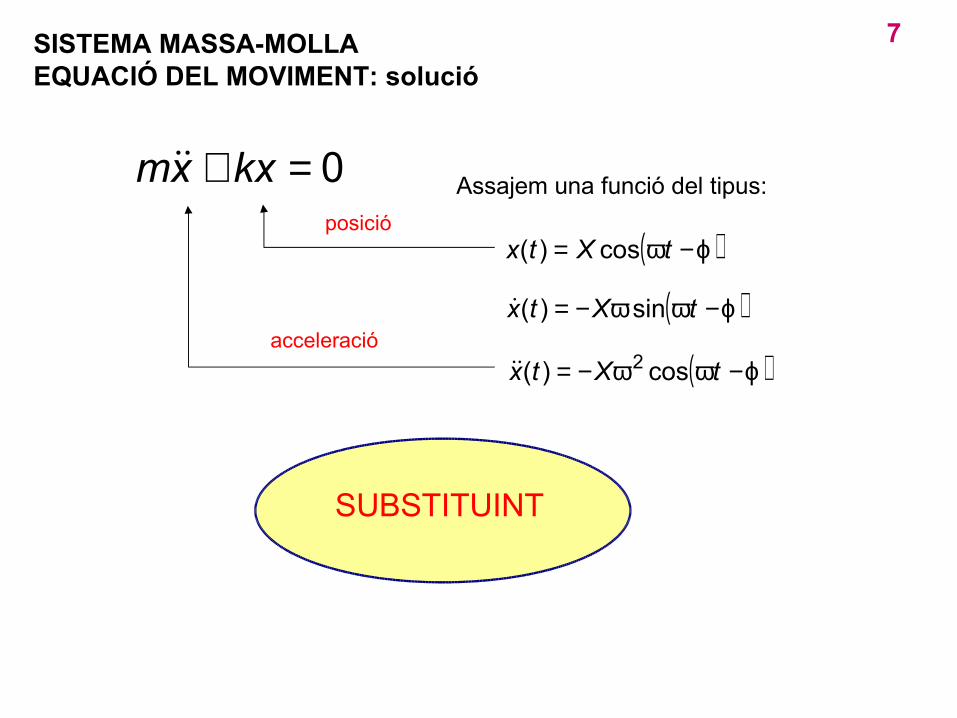
0=+ kxxm Assajem una funció del tipus:
SISTEMA MASSA-MOLLAEQUACIÓ DEL MOVIMENT: solució
SUBSTITUINT
posició
acceleració
( )ϕω −= tXtx cos)(
( )ϕωω −−= tXtx sin)(
( )ϕωω −−= tXtx cos)( 2
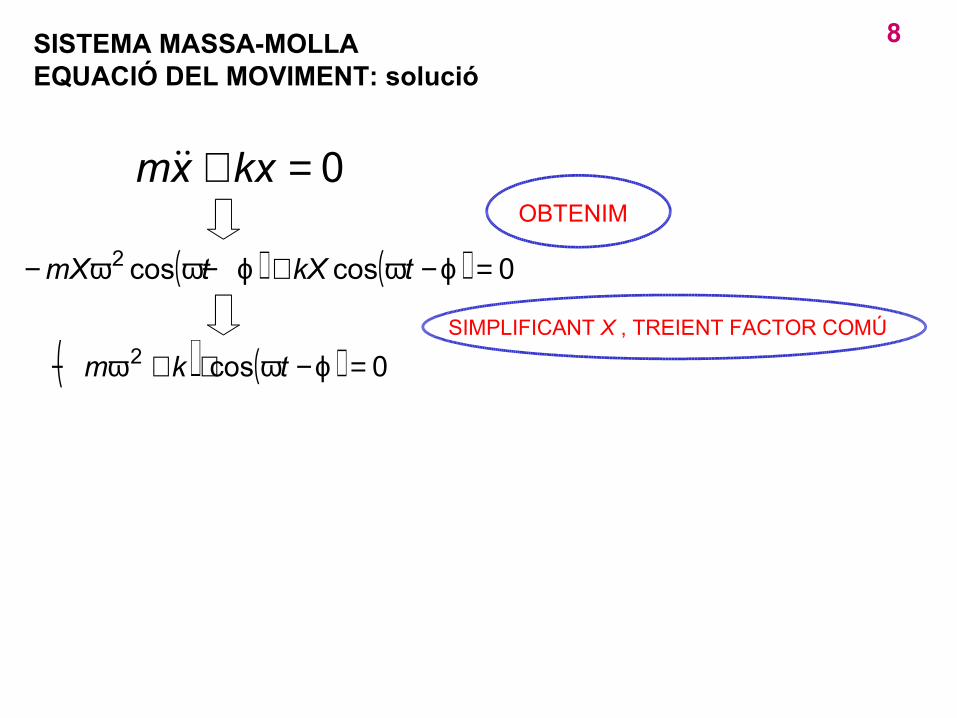
8
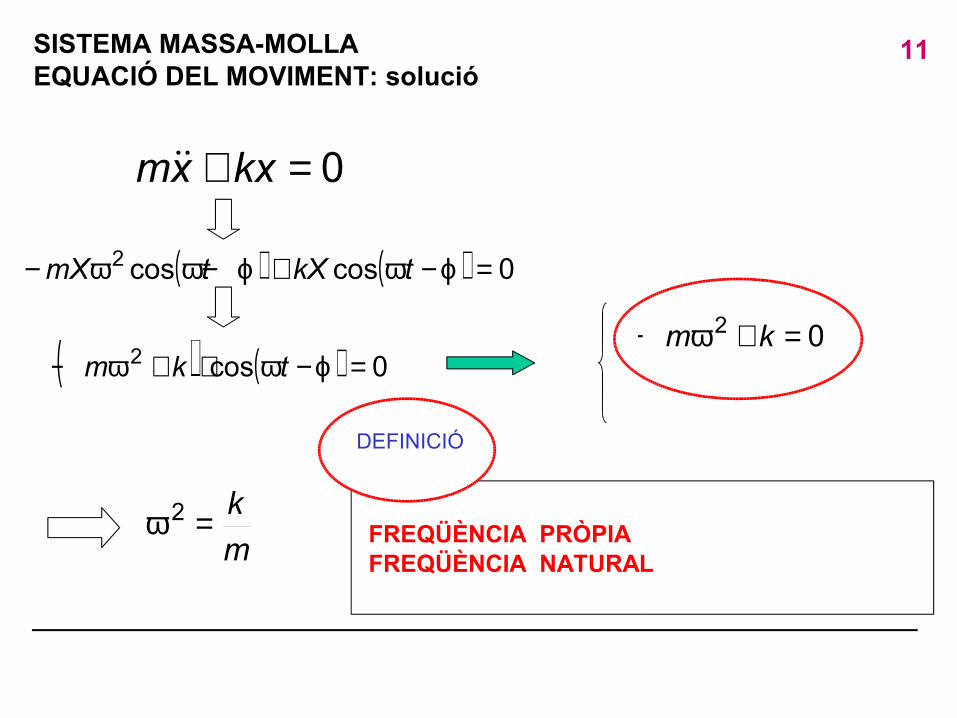
0=+ kxxm
( ) ( ) 0coscos2 =−+−− ϕωϕωω tkXtmX
( ) ( ) 0cos2 =−⋅+− ϕωω tkmSIMPLIFICANT X , TREIENT FACTOR COMÚ
SISTEMA MASSA-MOLLAEQUACIÓ DEL MOVIMENT: solució
OBTENIM
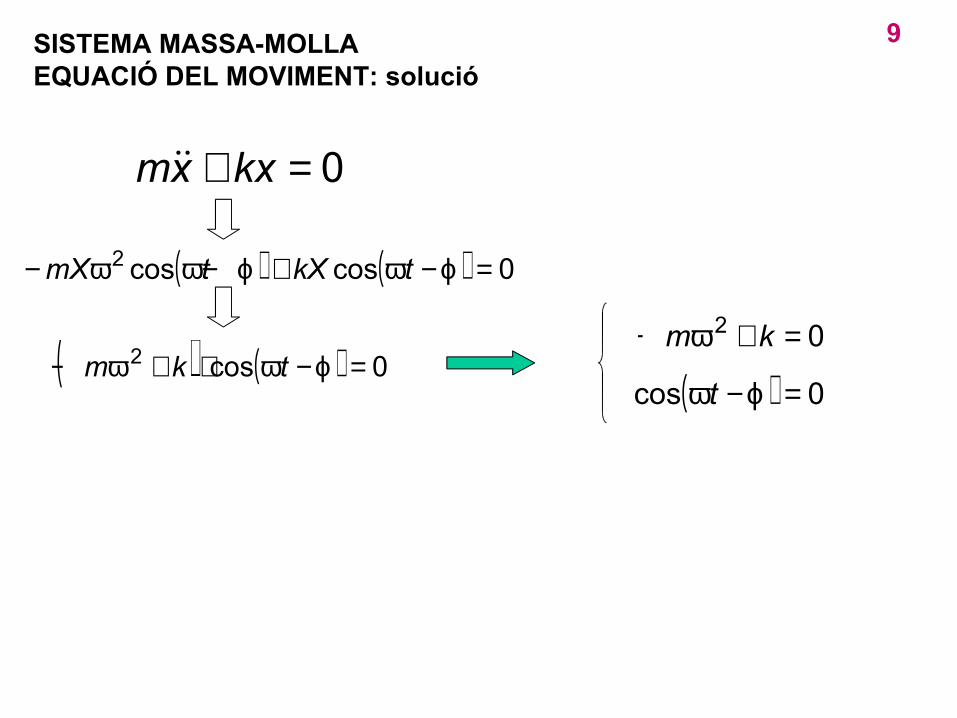
9
02 =+− kmω
( ) 0cos =−ϕωt
SISTEMA MASSA-MOLLAEQUACIÓ DEL MOVIMENT: solució
0=+ kxxm
( ) ( ) 0coscos2 =−+−− ϕωϕωω tkXtmX
( ) ( ) 0cos2 =−⋅+− ϕωω tkm
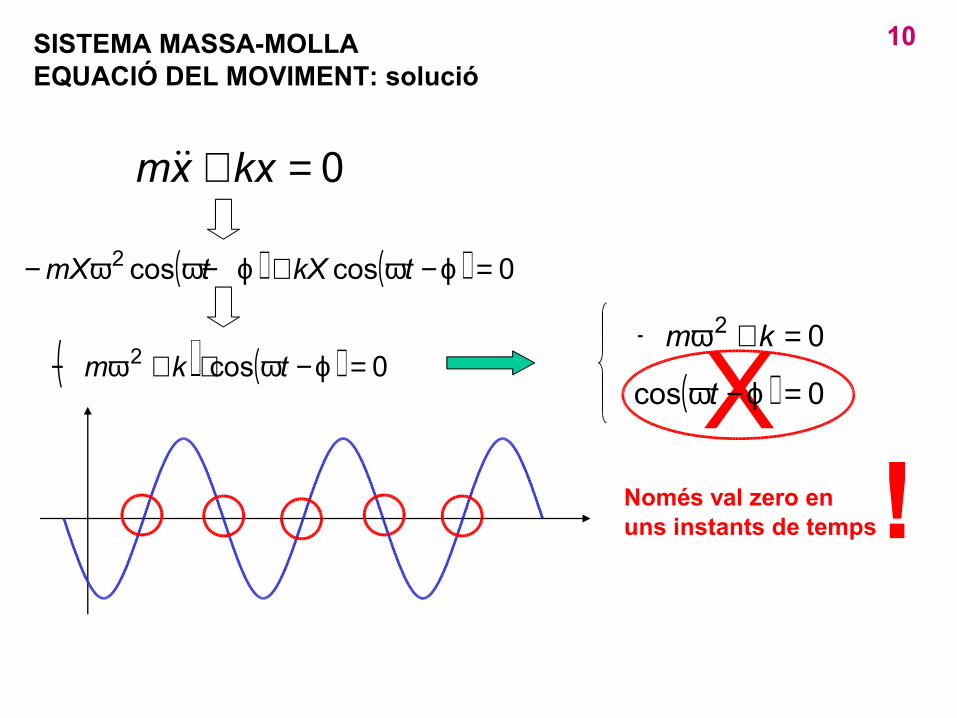
10
Només val zero en uns instants de temps!
X
SISTEMA MASSA-MOLLAEQUACIÓ DEL MOVIMENT: solució
02 =+− kmω
0=+ kxxm
( ) ( ) 0coscos2 =−+−− ϕωϕωω tkXtmX
( ) ( ) 0cos2 =−⋅+− ϕωω tkm( ) 0cos =−ϕωt
SISTEMA MASSA-MOLLAEQUACIÓ DEL MOVIMENT: solució
0=+ kxxm
02 =+− kmω
mk=2ω FREQÜÈNCIA ANGULAR PRÒPIA
FREQÜÈNCIA ANGULAR NATURAL
DEFINICIÓ
FREQÜÈNCIA PRÒPIAFREQÜÈNCIA NATURAL
( ) ( ) 0coscos2 =−+−− ϕωϕωω tkXtmX
( ) ( ) 0cos2 =−⋅+− ϕωω tkm
11
12SISTEMA MASSA-MOLLAEQUACIÓ DEL MOVIMENT: solució
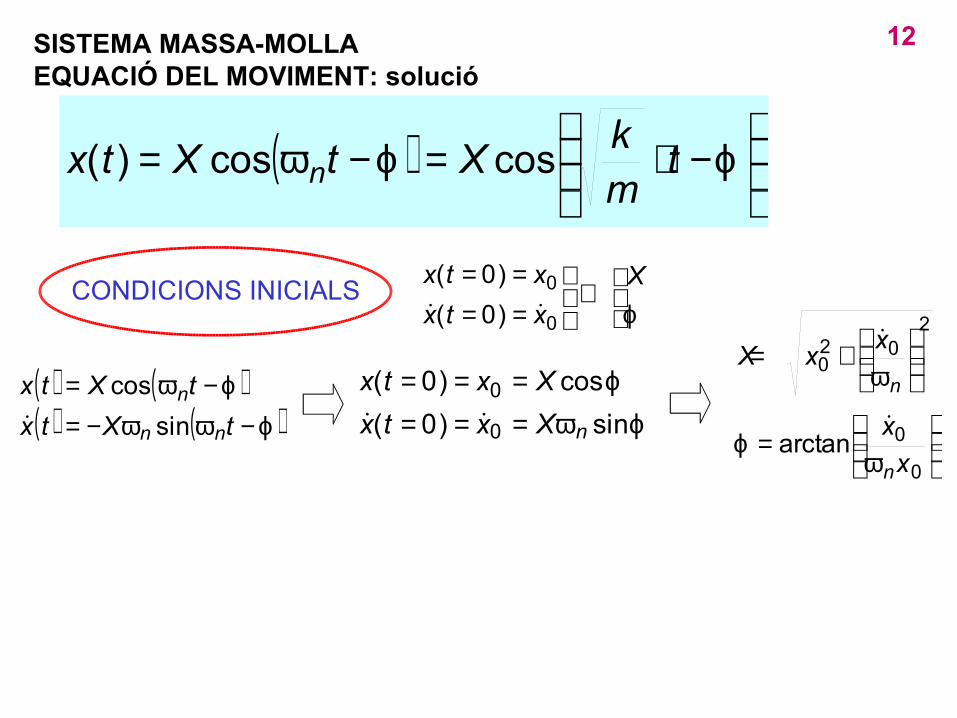
( )
−⋅=−= ϕϕω t
mkXtXtx n coscos)(
( ) ( )( ) ( )ϕωω
ϕω−−=
−=tXtx
tXtx
nn
n
sincos
⇒
====
ϕX
xtxxtx
0
0
)0()0(
CONDICIONS INICIALS
ϕωϕ
sin)0(cos)0(
0
0
nXxtxXxtx
======
=
+=
0
0
202
0
arctanxx
xxX
n
n
ωϕ
ω
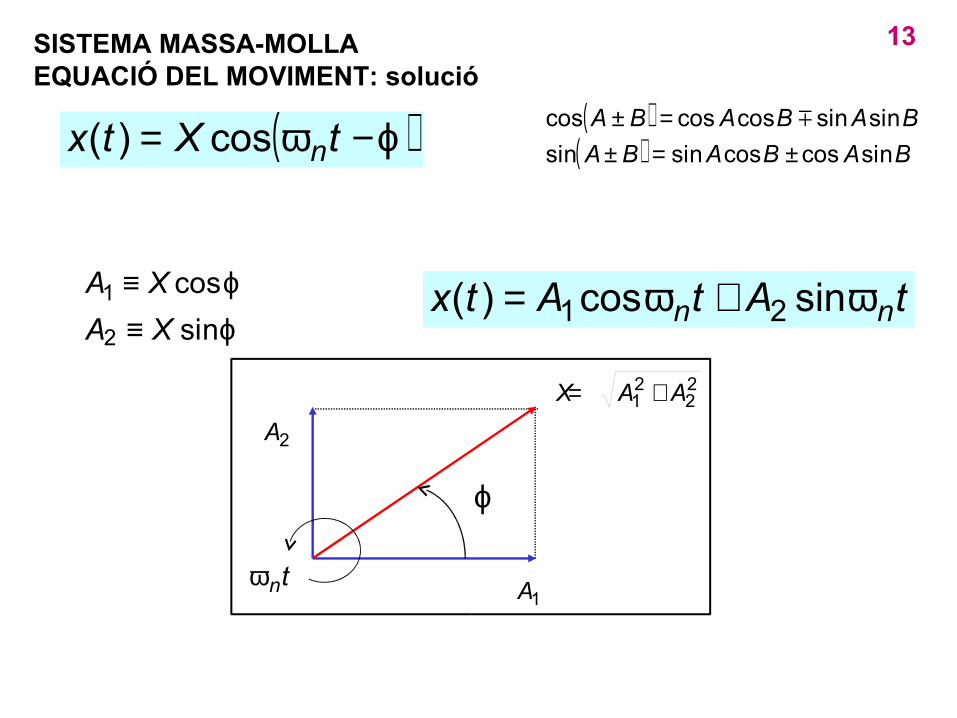
13SISTEMA MASSA-MOLLAEQUACIÓ DEL MOVIMENT: solució
( )ϕω −= tXtx ncos)( ( )( ) BABABA
BABABAsincoscossinsinsinsincoscoscos
±=±=±
()()()tXtXttXtxnnnnωϕωϕϕωϕωsinsincoscossinsincoscos)(+=+=
ϕϕ
sincos
2
1
XAXA
≡≡ tAtAtx nn ωω sincos)( 21 +=
1A
2A
22
21 AAX +=
ϕ
tnω
14SISTEMA MASSA-MOLLACondicions inicials
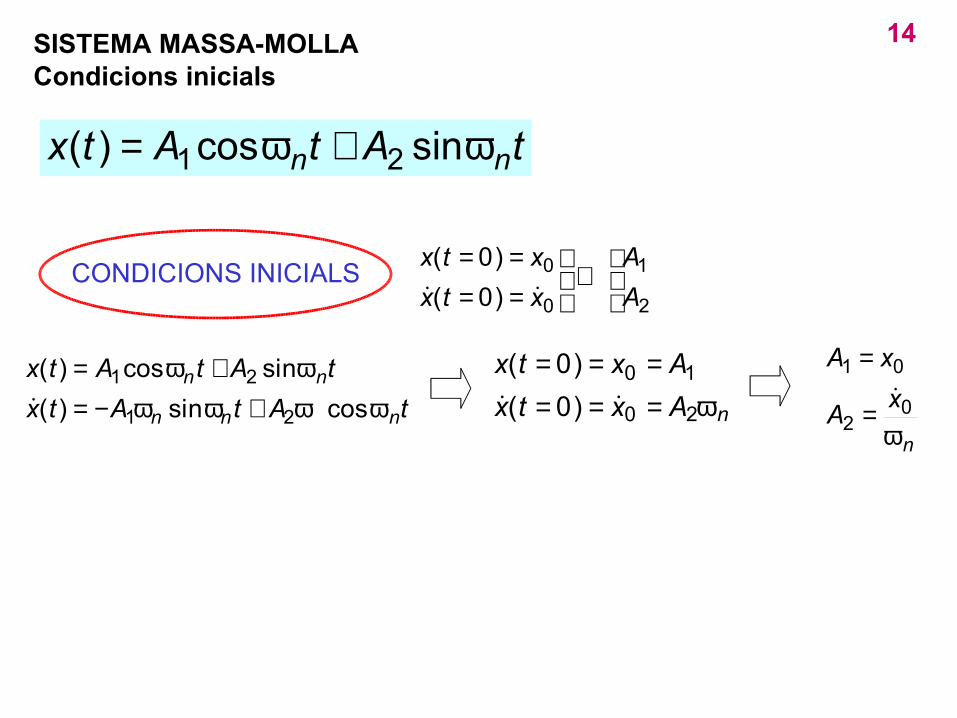
tAtAtxtAtAtx
nnn
nn
ωωωωωω
cossin)(sincos)(
21
21
+−=+=
⇒
====
2
1
0
0
)0()0(
AA
xtxxtx
CONDICIONS INICIALS
nAxtxAxtx
ω20
10
)0()0(
======
n
xA
xA
ω0
2
01
=
=
tAtAtx nn ωω sincos)( 21 +=
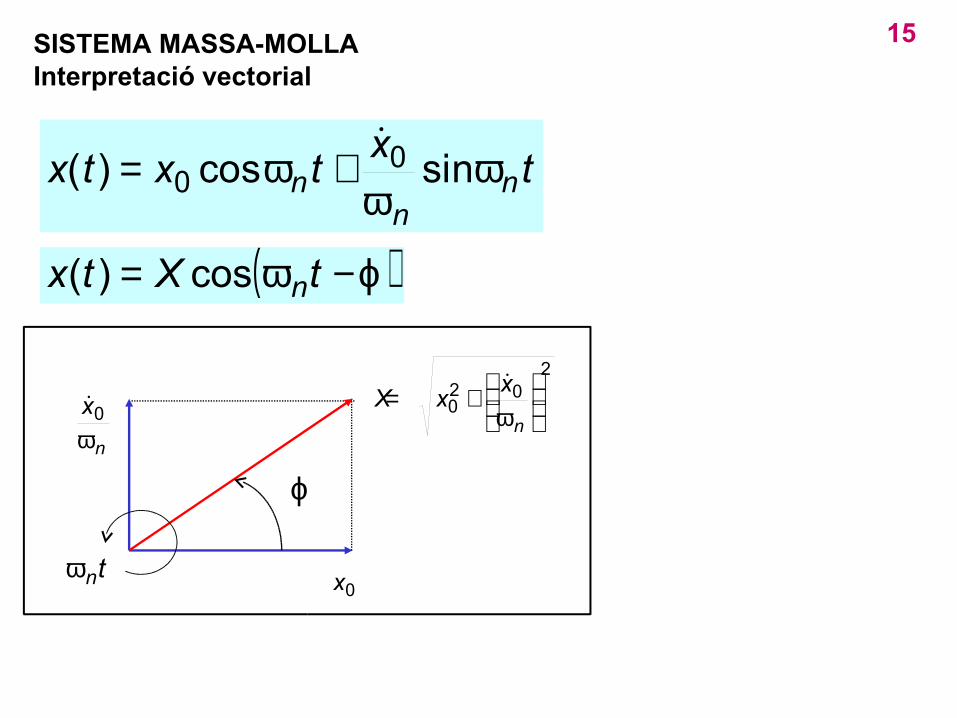
15SISTEMA MASSA-MOLLAInterpretació vectorial
txtxtx nn
n ωω
ω sincos)( 00
+=
( )ϕω −= tXtx ncos)(
0x
n
xω
0
202
0
+=
n
xxXω
ϕ
tnω
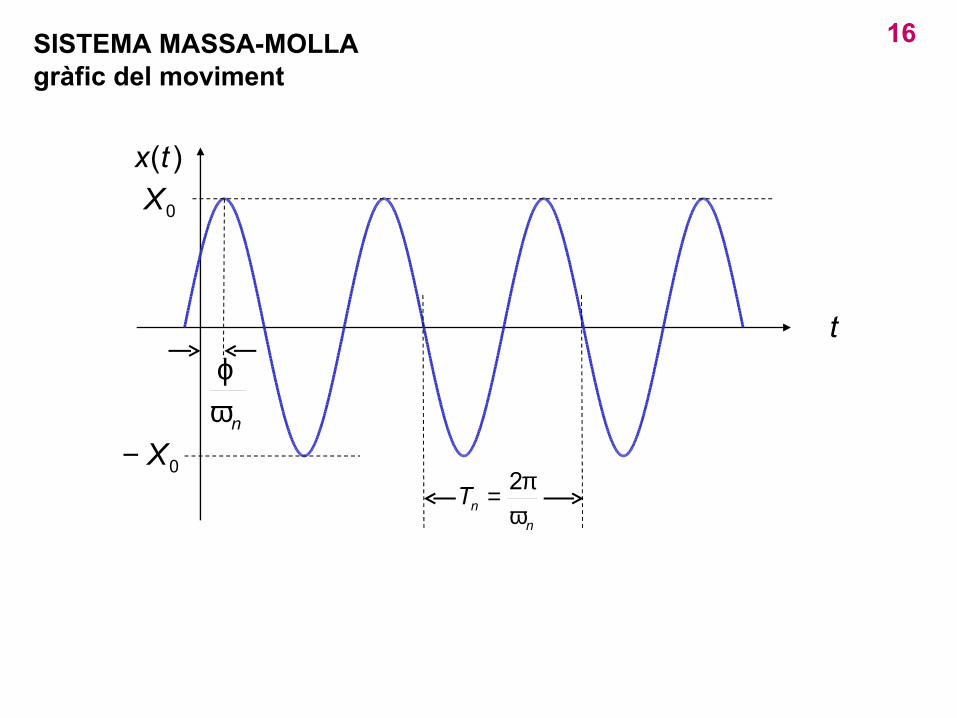
16SISTEMA MASSA-MOLLAgràfic del moviment
nnT ω
π2=
)(tx
t
nωϕ
0X
0X−
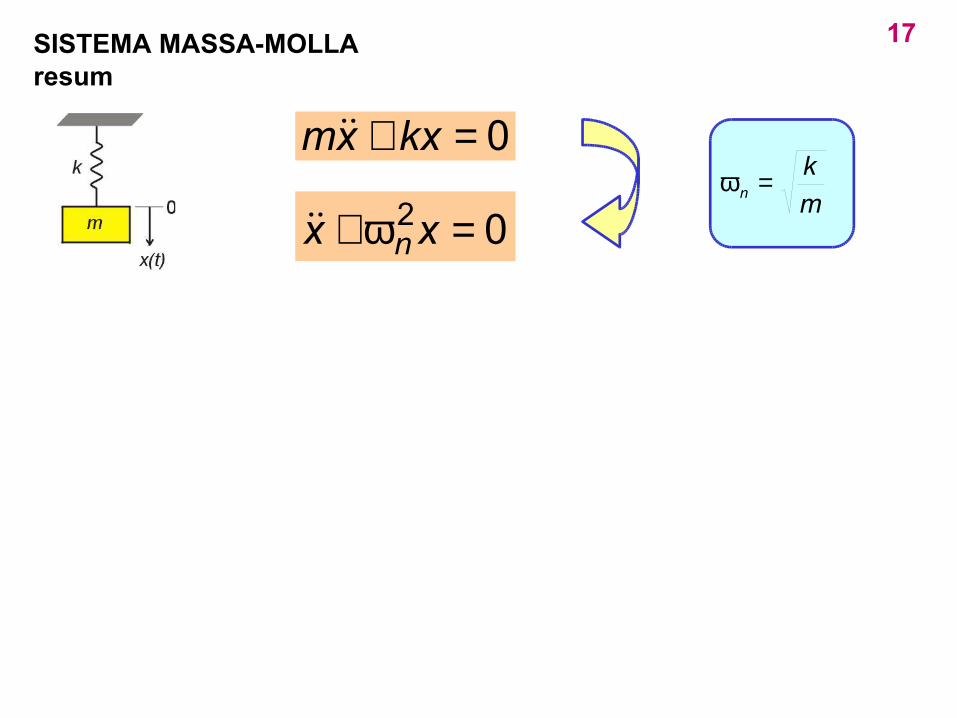
17SISTEMA MASSA-MOLLAresum
0=+ kxxm
mk
n =ω
02 =+ xx nω
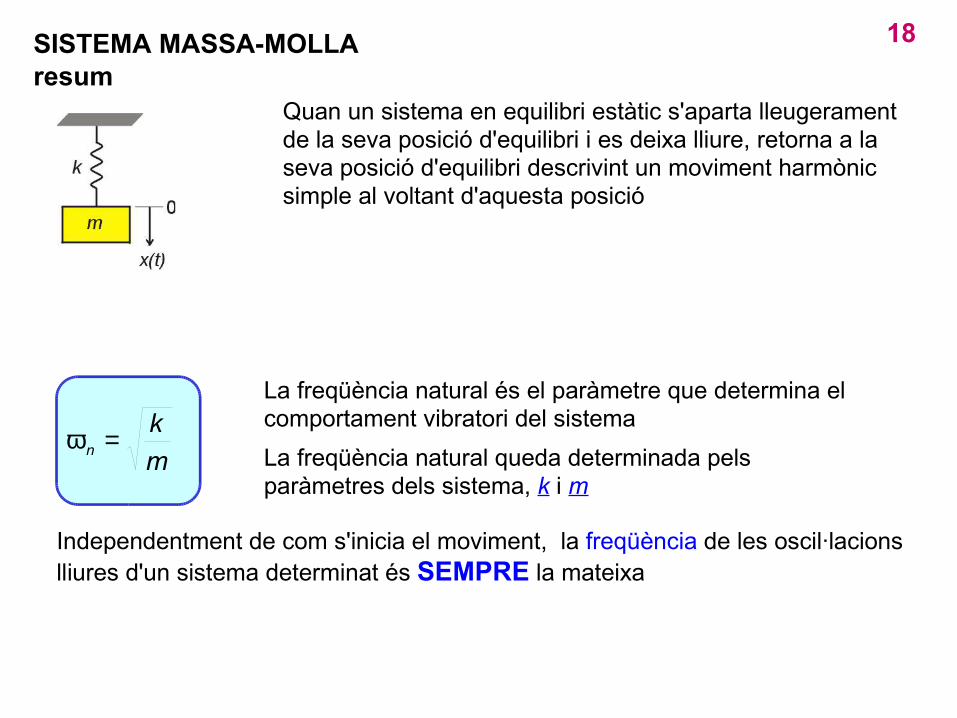
18SISTEMA MASSA-MOLLAresum
mk
n =ω
La freqüència natural és el paràmetre que determina el comportament vibratori del sistema
Quan un sistema en equilibri estàtic s'aparta lleugerament de la seva posició d'equilibri i es deixa lliure, retorna a la seva posició d'equilibri descrivint un moviment harmònic simple al voltant d'aquesta posició
La freqüència natural queda determinada pels paràmetres dels sistema, k i m
Independentment de com s'inicia el moviment, la freqüència de les oscil·lacions lliures d'un sistema determinat és SEMPRE la mateixa
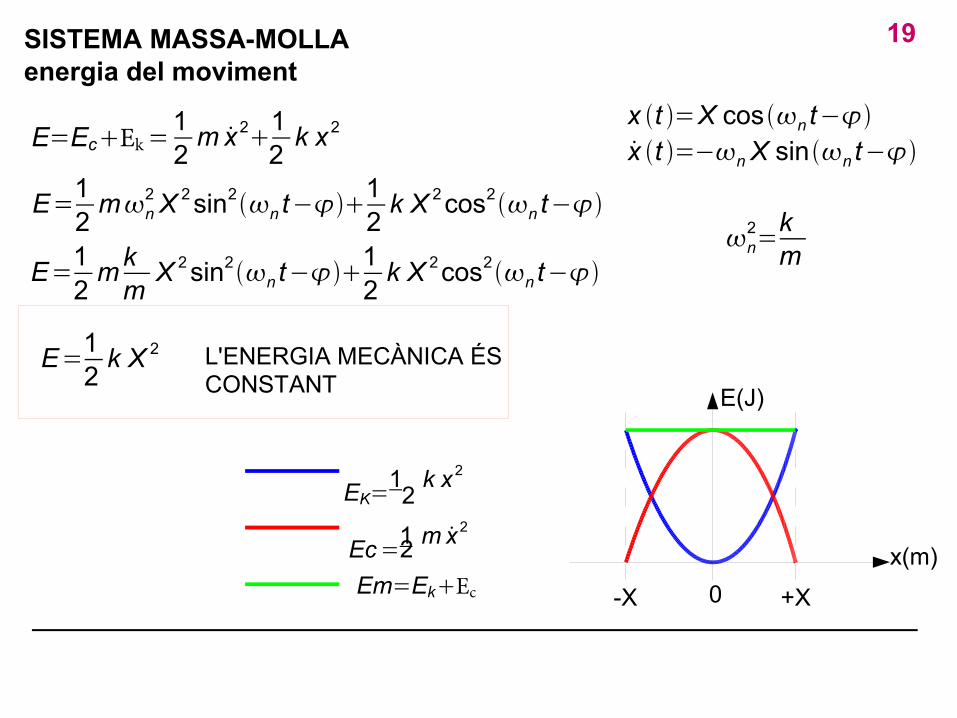
19SISTEMA MASSA-MOLLAenergia del moviment
x t =X cosn t−x t =−nX sinn t−E=Ec Ek =
12m x21
2k x 2
E=12mn
2X 2 sin2n t−12k X 2 cos2n t−
n2=kmE=1
2mkmX 2 sin2n t−1
2k X 2 cos2n t−
E=12k X 2 L'ENERGIA MECÀNICA ÉS
CONSTANT
x(m)
E(J)
+X-X 0
Ec =1 m x2
EK=12k x2
2 Em=Ek Ec
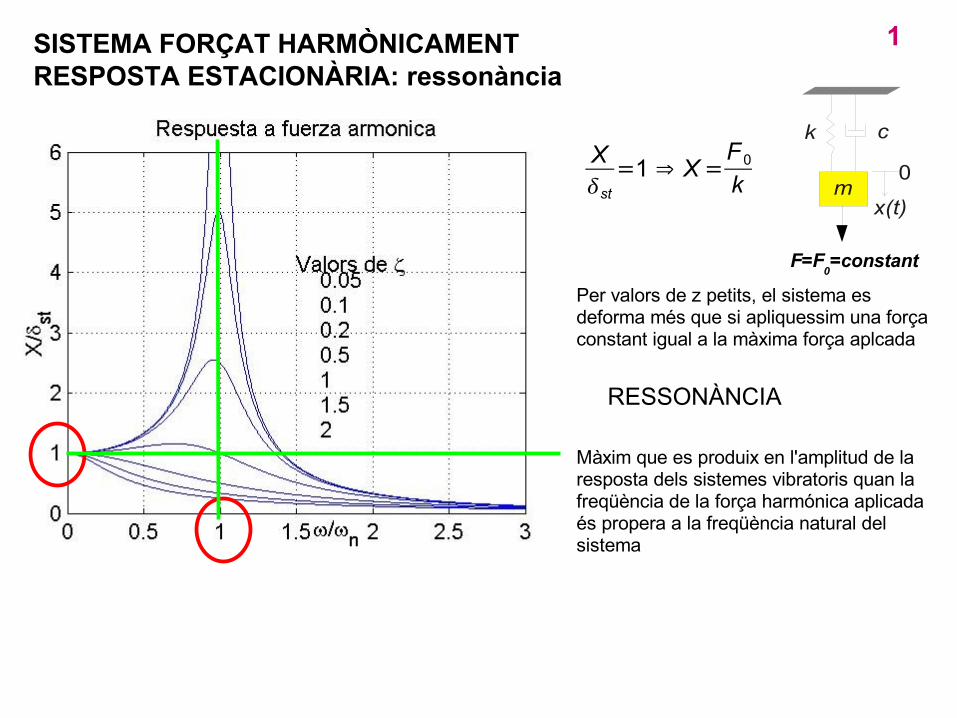
1SISTEMA FORÇAT HARMÒNICAMENTRESPOSTA ESTACIONÀRIA: ressonància
Xst
=1 ⇒ X=F0
k
k c
m0
x(t)
F=F0=constant
Per valors de z petits, el sistema es deforma més que si apliquessim una força constant igual a la màxima força aplcada
RESSONÀNCIA
Màxim que es produix en l'amplitud de la resposta dels sistemes vibratoris quan la freqüència de la força harmónica aplicada és propera a la freqüència natural del sistema
Related Documents








![CINEMÀTICA, DINÀMICA I ENERGIA MECÀNICAmjorba12/fisica/selectivitat-fisica-recull07-08-09.pdf · F.di Fdx — àrea sotaelgràficF-x — m(àreasotaelgràfica-x) [0,6] F —ma;](https://static.cupdf.com/doc/110x72/5b53272b7f8b9a0d398b7ce9/cinematica-dinamica-i-energia-meca-mjorba12fisicaselectivitat-fisica-recull07-08-09pdf.jpg)


