Chop-SPICE: An Efficient SPICE Simulation Technique For Buffered RC Trees Myung-Chul Kim, Dong-Jin Lee and Igor L. Markov Dept. of EECS, University of Michigan 1 TAU 2011, Myung-Chul Kim, University of Michigan

Chop-SPICE: An Efficient SPICE Simulation Technique For Buffered RC Trees Myung-Chul Kim, Dong-Jin Lee and Igor L. Markov Dept. of EECS, University of.
Dec 17, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Chop-SPICE: An Efficient SPICE Simulation Technique For Buffered RC Trees
Myung-Chul Kim, Dong-Jin Leeand Igor L. MarkovDept. of EECS, University of Michigan
1TAU 2011, Myung-Chul Kim, University of Michigan
TAU 2011, Myung-Chul Kim, University of Michigan
Fast SPICE Simulation: Motivation
■IC timing closure, especially at advanced technologynodes, heavily depends on highly-accurate timing simulations
− Increasing impact of PVT variation− Rigorous clock skew/slew constraints
■Circuit size and complexity rapidly increasing− Scalable SPICE technique is critical
2

TAU 2011, Myung-Chul Kim, University of Michigan
Key Feature of Chop-SPICE
■Developed as a compromise simulator (fast yet sufficiently accurate) for use by Contango2 software in the ISPD 2010 contest
■Simple and practical divide-and-conquer approach
■Can capture PVT variation and spatial correlation
■Flexible trade-off between runtime and solution quality
■Adaptability to various SPICE simulators
3

TAU 2011, Myung-Chul Kim, University of Michigan
ISPD10 Clock Tree Synthesis Contest
■45nm 2GHz CPU benchmarks from IBM and Intel
■Objective: Minimize the overall capacitance of the clock network
− Subject to constraints:– Monte-Carlo SPICE simulations with PVT variations– Local clock skew < 7.5 ps– Slew rate < 100ps– Hard runtime limit per benchmark < 12 hours
■Low-skew clock trees are especially unforgivingto timing-analysis inaccuracies
4

Prior Work
5TAU 2011, Myung-Chul Kim, University of Michigan
■ Ideal Timing Evaluator
− Fast runtime without sacrificing accuracy
− High fidelity, adaptability to various SPICE tools
Sp
eed
Accuracy
Simulation
Elmore,D2M,LnD
Ideal Timing Evaluator
SPICE,
AWE
Delay Models
Chop-SPICE Algorithm
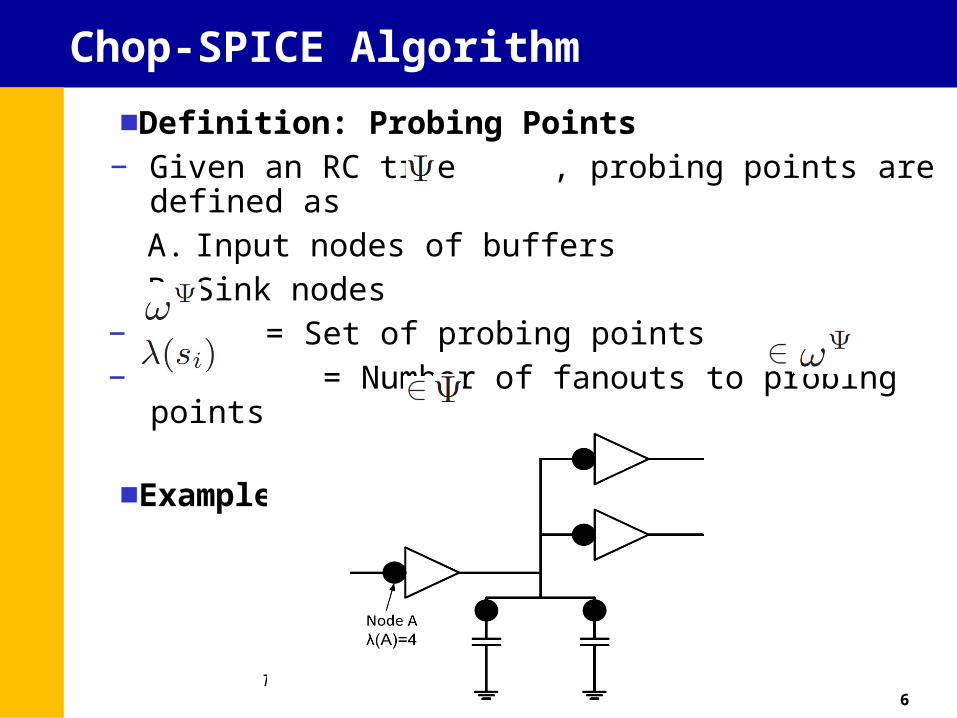
■Definition: Probing Points − Given an RC tree , probing points are defined as
A. Input nodes of buffersB. Sink nodes
− = Set of probing points− = Number of fanouts to probing points
at node si ■Example
6TAU 2011, Myung-Chul Kim, University of Michigan
TAU 2011, Myung-Chul Kim, University of Michigan
Chop-SPICE Algorithm
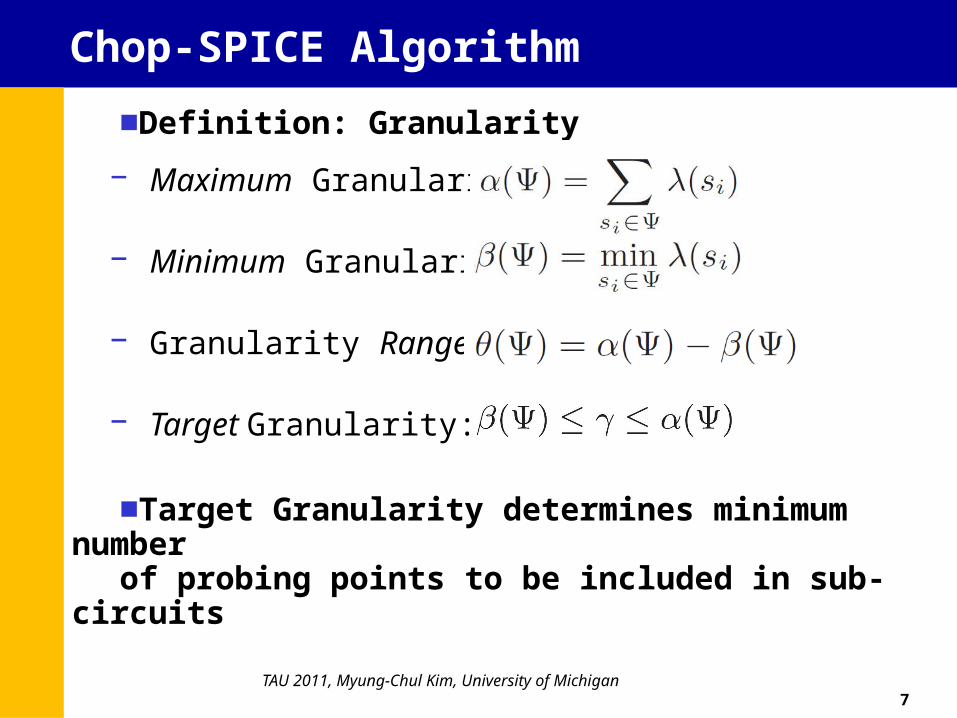
■Definition: Granularity
− Maximum Granularity:
− Minimum Granularity:
− Granularity Range:
− Target Granularity:
■Target Granularity determines minimum number of probing points to be included in sub-circuits
7

Chop-SPICE Flow
8
RC Tree instance
RC Tree traversal
yes
no
Invoke SPICE simulation
Target granularityreached?
RC treeexhausted?
Sub-circuit generation
Apply input slew stimuli
Delay and slew propagation
no
yes
Delay and slew update
End
TAU 2011, Myung-Chul Kim, University of Michigan
Sub-circuit Generation
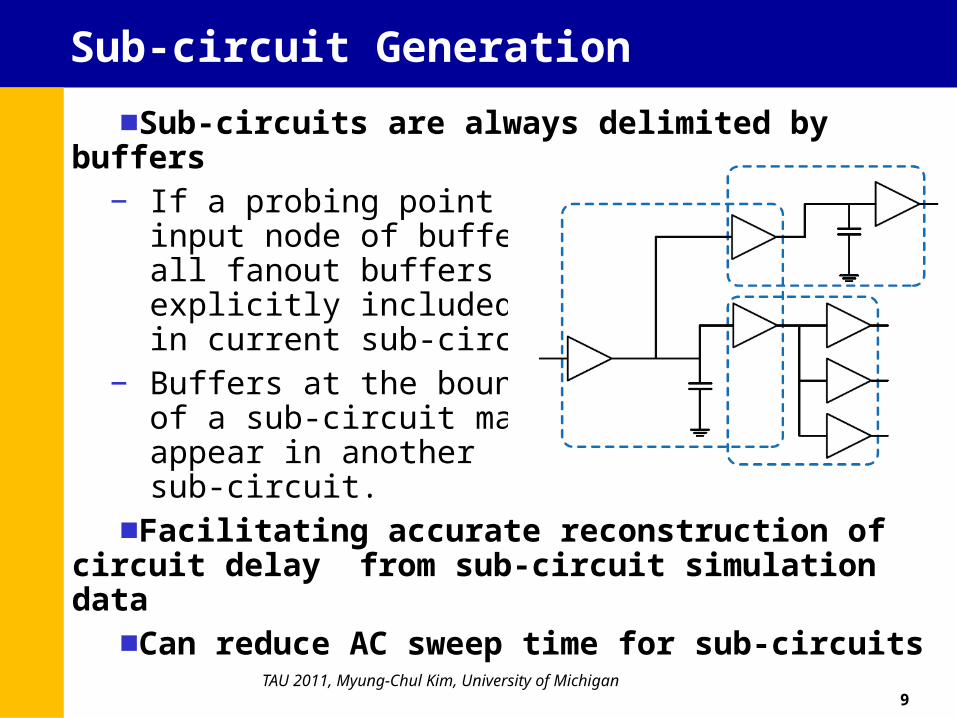
■Sub-circuits are always delimited by buffers− If a probing point is an
input node of buffer(s), all fanout buffers are explicitly included in current sub-circuit
− Buffers at the boundary of a sub-circuit may also appear in another sub-circuit.
■Facilitating accurate reconstruction of circuit delay from sub-circuit simulation data
■Can reduce AC sweep time for sub-circuits
9

TAU 2011, Myung-Chul Kim, University of Michigan
Delay Propagation
■Purpose : After retrieving probing points’ delay from SPICE, they can be propagated in order to capture delay for probing points in subsequent sub-circuits.
■Calculation of delay from the root node s0 to node sj
− Find the sub-circuit containing sj .
− Identify the shortest tree path from s0 to sj , and the earliest node si in the sub-circuit that lies on this tree path (Assume that signal delay from s0 to si was computed recursively).
− The delay from si to sj is obtained by SPICE simulation and added to delay at si.
10

TAU 2011, Myung-Chul Kim, University of Michigan
Slew Propagation
■Purpose : After retrieving probing points’ slew from SPICE, they
can be used in order to capture slew for probing points in subsequent sub-circuits.
■Slew at a given node can be expressed as a function of input slew of a sub-circuit.
− Slew measured at the previous stage (up to the root node si in a given sub-circuit) should be accounted for when stimuli for the current sub-circuit are generated.
− Slew at a node is directly calculated by SPICE simulation.
11

Empirical Results: ISPD10 Benchmarks
■Experimental setup− Single threaded runs on a 3.2GHz Intel core i7
Quad CPU Q660 Linux workstation− Buffered RC networks generated by applying Contango2
to ISPD’10 high-performance CNS contest benchmark suite
− Open-source NgSPICE-2.2
■Target granularity − Varies from (full-scale SPICE simulation)
to in order to examine trade-offs
12TAU 2011, Myung-Chul Kim, University of Michigan

TAU 2011, Myung-Chul Kim, University of Michigan
Empirical Results: Avg. Error
13

Empirical Results: Max. Error and Trade-off
14
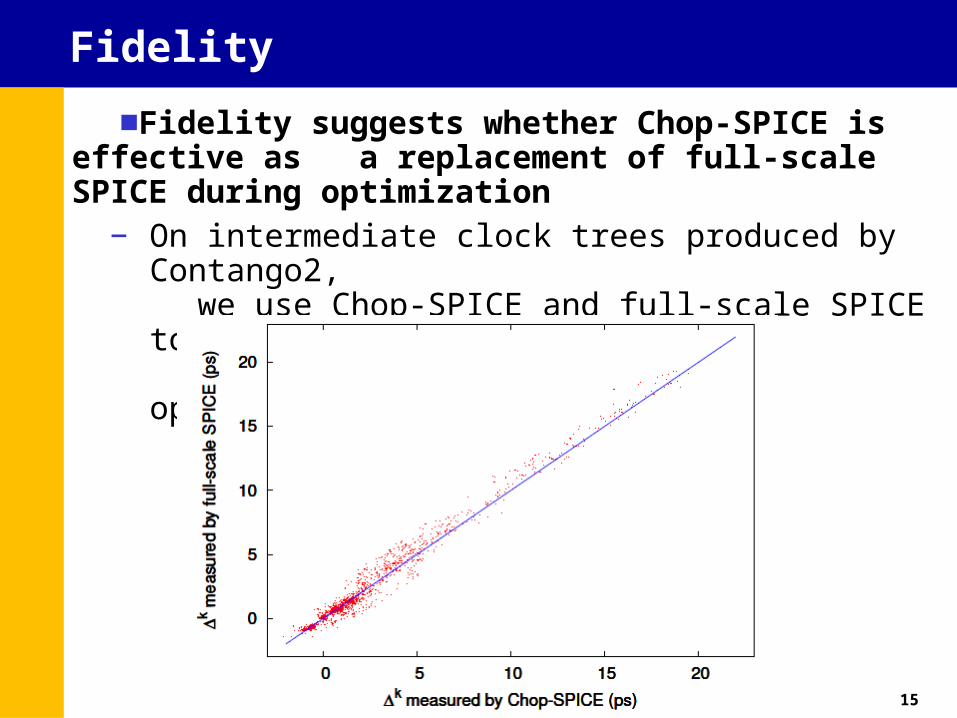
Fidelity
■Fidelity suggests whether Chop-SPICE is effective as a replacement of full-scale SPICE during
optimization − On intermediate clock trees produced by Contango2,
we use Chop-SPICE and full-scale SPICE to measure
sink delays before and after optimization
15TAU 2011, Myung-Chul Kim, University of Michigan

TAU 2011, Myung-Chul Kim, University of Michigan
Future work
■Extension to general RC networks− An algorithm for computing signal delays in non-tree RC
networks by partitioning a given circuit into a spanning tree and non-tree links, and invoking an RC-tree computation is given [6]
− A recent study [16] report 98% correlation to full SPICE runs.
■Using parallelism− Two sub-circuits can be simulated in parallel
if they do not lie on the same path to root. − The larger the RC tree, the more parallelism
can be found.
16

Conclusions
■Accurate estimation of circuit delay is becoming more difficult at new technology nodes
− Clock-skew estimation in CNS requires picosecond precision
■Chop-SPICE partitions the original RC tree into sub-circuits, simulates each of them with SPICE, and reconstructs global results from simulation data for sub-circuits
■Empirical validation shows that Chop-SPICE offers attractive trade-offs between accuracy and runtime
■Chop-SPICE provides not only good accuracy, but also fidelity sufficient for use in external optimization algorithms
■Can be applied to any SPICE simulators
17TAU 2011, Myung-Chul Kim, University of Michigan

Questions and Answers
Thank you!Time for Questions
18TAU 2011, Myung-Chul Kim, University of Michigan
Related Documents











